| Похожие рефераты | Скачать .docx |
Курсовая работа: Технологія монтажу та ремонту машин постійного струму
Зміст
1. Вступ. 2
2. Організація. Робоче місце. 4
3. Електричні двигуни постійного струму. 6
3.1 Способи збудження і пуск двигунів постійного струму. 7
3.2 Регулювання швидкості обертання та реверсування двигунів постійного струму 10
3.2.1 Регулювання швидкості обертання двигуна зміною опору кола якоря. 11
3.2.2 Регулювання швидкості обертання двигуна зміною магнітного потоку. 12
3.2.3 Регулювання швидкості обертання зміни, підведеної до двигуна напруги 13
3.2.4 Регулювання швидкості обертання двигуна зміною магнітного потоку Ф 13
3.3 Характеристика двигунів постійного струму. 14
3.3.1. Робочі характеристики двигунів з паралельним збудженням. 15
3.3.2 Характеристка двигуна з послідовним збудженням. 18
3.3.3 Залежність ККД двигуна від Р2 20
4. Вимірювальні і контрольні інструменти. 22
4.1 Вимірювальні інструменти. 22
4.2 Мікрометри, штангенциркулі, штихмаси. 22
4.3 Валовий та гідростатичний рівні 22
4.4 Мірні інструменти для пробного запуску. 23
4.5 Такелажні пристосування. 23
4.6 Монтажні пристосування і механізми. 23
4.7 Такелажні механізми, матеріали та інструменти для такелажних робіт. 23
5. Матеріали, що застосовуються при виконанні роботи. 24
6. Техніка безпеки. 26
Використана література. 28
1. Вступ
Енергетика – це одна з найбільших галузей народного господарства України. За розвитком енергетики визначають стан розвитку країни в цілому. Електренергія сьогодні виробляється на електростанціях різного типу. В Україні працюють теплові, гідро-, атомні, вітрові та іншого типу електростанції.
Найбільші теплові електростанції розміщені в Донбасі. Серед них найпотужніші є Луганська, Миронівська, Старобишівська (по 2,5 млн. кВт кожна), Слов’янська (2,1 млн. кВт), Вуглегірська (3,6 млн. кВт), Курахівська і Штерівська. Тут діє потужна лінія електропередачі Донбас – захід України.
У Придніпров’ї, не зважаючи не дещо іншу сировинну базу і наявність гідроресурсів, виробництво електроенергії на теплових електростанціях також перевищує.
На території України розташовані атомні електростанції (Хмельницька, Південноукраїнська, Запорізька та Рівненська) сумарною потужністю 13 млн. кВт.
Атомна енергетика пропонує екологічно найчистішу технологію виробництва електроенергії. Перевагою АЕС є також стабільність режиму їх роботи. Увімкнена в мережу атомна електростанція дає сталий потік електроенергії.
Зараз електроенергії потрібно все більше і більше, але запаси природного газу, вугілля, нафти обмежені, атомні електростанції недосконалі і їх робота загрожує довкіллю.
Серед нетрадиційних видів енергії можливе використання біомас і створення на їх основі біогазу. З’явилися і методи вирощування рослин, які дають нафту.
Нині загальний технічний стан електроенергетики України незадовільний. Це пов’язано з тим, що тривалий час не проводилася модернізація енергетичного господарства.
З усіх видів енергії найчастіше застосовується електромагнітна, яку на практиці називають електричною.
Енергія – це кількісна міра руху та взаємодія всіх форм матерії.
Для будь-якого виду енергії можна назвати її носія. Наприклад, механічною енергією володіє вода, що падає на лопаті гідротурбіни, заведена пружина; тепловою – нагрітий газ, пара, гаряча вода.
Важливою для України є безпека роботи атомних станцій. Катастрофа на Чорнобильській АЕС перетворила державу на зону екологічної катастрофи. В навколишнє середовище було викинуто близько 1 млрд. Кюрі різних радіонуклідів, забрудненими виявилися цілі області України.
2. Організація. Робоче місце
Для виконання ремонтних робіт в найбільш короткі терміни необхідно: правильно визначити характер і об’єм ремонту, який має виконуватись і виділити відповідних виконавців; до початку ремонту зкомплектувати всі запасні деталі для заміни тих, що вийшли з ладу; дати відповідним цехам та дільницям підприємства замовлення на виконання зварювальних, токарних та ливарних робіт; підготувати необхідну документацію на проведення ремонту (відомості дефектів, паспорти обладнання, акти попередніх випробувань та інше); привести в порядок робоче місце (мати стиснене повітря і напругу 12 В, підібрати, перевірити та підготувати до роботи необхідні для роботи інструменти та пристосування, освітити та при необхідності загородити робоче місце); підготувати апарати та прилади для випробувань, контролю та перевірок обладнання, яке ремонтується; забезпечити робоче місце ремонтного персоналу засобами техніки безпеки та перевіреними засобами захисту.
Для здійснення швидкісного ремонту електрообладнання велике значення має наукова організація праці (НОП). Практика ремонту показує, що навіть самим найкращим ремонтом обладнання і висококваліфікованими працівниками не можна швидко відремонтувати обладнання, якщо погано організувати роботу ремонтників.
В залежності від наявності установленого на виробництві електрообладнання організовують електромонтажні майстерні різного виготовлення. Виробнича площа майстерні визначається кількістю машин, проходженням середнього і капітального ремонту. Її вибирають із розрахунку 1 м2 на кожну електромашину, яка ремонтується в рік. Цією нормою враховується і площа, необхідна для виготовлення запасних деталей електрообладнання і для ремонту апаратури вантажопідйомних кранів і магнітів.
Електромонтажні роботи виконують як власними силами заводу, так і силами спеціалізованих підрядних організацій. Для механізації робіт по ремонту електрообладнання більшість електроцехів заводів обладнано підйомно-транспортними пристосуваннями вантажопідйомністю до 10 т, тому електрообладнання більшої ваги ремонтують на місці його виготовленя або силами спеціалізованих організацій. Силові трансформатори потужністю більше 1000 кВ · А і електродвигунами потужністю 1000 кВт рекомендовано ремонтувати силами спеціалізованих організацій міністерства електротехнічної промисловості.
На великих заводах з великою кількістю різних електричних машин, пускорегулювальної апратури і трансформаторів (силових, зварювальних, вимірювальних і так далі) створюють електроремонтні майстерні, де виконують всі види ремонту. Технологічний процес ремонту електрообладнання в великих майстернях зазвичай проводять по поточному вузловому методу: пошкоджені вузли електрообладнання (ротор, статор, магнітопровід трансформатора з обмотками, бак трансформатора та ін.) розібраної машини трансформатора, апарата доставляють одночасно на відповідні спеціалізовані ремонтні дільниці (розбірно-дефектувальне відділення, промивальне, обмотковий з просочуванням та сушінням слюсарно-механічна, збірна та ін.).
3. Електричні двигуни постійного струму
Принцип дії обертального моменту двигунів постійного струму.
Електричні двигуни постійного струму, як і взагалі електричні машини, є оборотними, тобто вони без будь-яких конструктивних змін можуть працювати як генератори, так і двигуни.
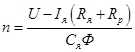
Принцип дії електродвигунів ґрунтується на взаємодії магнітного поля статора Ф із струмом якоря Ія . Електромагнітний момент, який виникає при цьому, приводить якір в обертовий рух. Наявність колектора в двигунах постійного струму забезпечує зміну напруги струму в обмотках якоря при переході секцій через геометричну нейтраль. Завдяки цьому обертальний момент залишається сталим за напрямом і величиною. Якщо підвести до якоря двигуна постійну напругу U , то виникає обертальний електромагнітний момент. Під впливом цього моменту якір двигуна почне обертатися з певним числом обертів. При обертанні якоря його провідники перетинатимуть силові лінії магнітного поля статора, в них індукуватиметься ЕРС, спрямована (за правилом правої руки) назустріч струму, тобто назустріч підведеній напрузі. На цій підставі індуковану ЕРС називають зворотною, або проти-ЕРС. Якщо в якийсь момент струм якоря становить Ія , магнітний потік полюсів Ф і число обертів n не змінюється за величиною, то рівняння ЕРС для двигуна буде таке:
![]()
звідки
![]()
Отже, прикладена до двигуна напруга зрівноважуєтсья проти-ЕРС двигуна і спадом напруги на активному опорі кола якоря ![]() при проходженні по ньому струму
при проходженні по ньому струму ![]() . Складову
. Складову ![]() називають омічним спадом напруги в колі якоря.
називають омічним спадом напруги в колі якоря.
Якщо обидві частини рівняння помножити на ![]() , то
, то
![]() .
.
З рівняння видно, що підведена до якоря двигуна потужність дорівнює сумі електромагнітної потужності, що передається на вал двигуна ![]() і потужності, яка йде на покриття витрат у колі якоря
і потужності, яка йде на покриття витрат у колі якоря ![]() .
.
Отже, обертальний електромагнітний момент двигуна дорівнює сумі двох моментів: корисного гальмівного, створюваного приводом, і гальмівного при холостому ході, який виникає внаслідок тертя всередині двигуна і втрат у сталі.
3.1 Способи збудження і пуск двигунів постійного струму
Двигуни постійного струму, як і генератори, бувають з незалежним, паралельним, послідовним і мішаним збудженням. Незалежне збудження застосовують тоді, коли напруги збудження і якоря відмінні.
У двигунах з паралельним збудженням напруга мережі однакова для якоря і для обмотки збудження. Номінальний струм двигуна ![]() дорівнює сумі струмів у якорі та обмотці збудження:
дорівнює сумі струмів у якорі та обмотці збудження:
![]() .
.
Двигуни з послідовним збудженням мають обмотку збудження, яка послідовно приєднана до обмотки якоря, тому струм якоря є струмом збудження
![]() .
.
Електромагнітний момент для цього двигуна пропорційний квадрату струму:
![]() ,
,
тому що основний потік для ненасиченої машини пропорційний струму
![]() .
.
Двигуни зі змішаним збудженням мають дві обмотки збудження, одну з яких увімкнено паралельно якорю, а другу – послідовно з ними. Послідовна обмотка збудження має небагато витків і може вмикатись узгоджено або зустрічно. У першому разі її електромагнітне поле підсилюватиме поле основної паралельної обмотки, а в другому – послаблюватиме.
Пускають двигун постійного струму з допомогою пускового реостата. Це пояснюється тим, що в момент пуску проти-ЕРС дорівнює нулю (![]() ), тому струм у якорі буде в 8-10 раз більший, ніж номінальний. Активний опір обмотки якоря малий (десяті або навіть соті частки ома).
), тому струм у якорі буде в 8-10 раз більший, ніж номінальний. Активний опір обмотки якоря малий (десяті або навіть соті частки ома).
За формулою струму якоря
![]() .
.
При пуску ![]() , тому
, тому ![]() , тоді
, тоді
![]() .
.
Для обмеження пускового струму послідовно з якорем вмикають пусковий реостат ![]() , який у міру розгону двигуна поступово повністю виводиться. Пусковий струм визначається за формулою:
, який у міру розгону двигуна поступово повністю виводиться. Пусковий струм визначається за формулою:
![]() ,
,
де ![]() – пусковий опір.
– пусковий опір.
Щоб мати потрібний пусковий момент, опір пускового реостата вибирають таким, щоб пусковий струм був більший від номінального в 1,5 – 2,0 раза. Крім того, для збільшення пускового моменту і полегшешння пуску паралельну обмотку збудження вмикають на повну напругу мережі, для чого регулювальний реостат у колі паралельного збудження виводять повністю. Процес пуску двигуна з триступеневим пусковим реостатом показано на рис. 3.1.1.

Рис. 3.1.1. Електрична схема двигуна постійного струму з паралельним збудженням
Під дією пускового обертального моменту ![]() ротор двигуна почне обертатись і в якорі виникне проти-ЕРС. Тоді струм якоря визначають з формули електричної рівноваги
ротор двигуна почне обертатись і в якорі виникне проти-ЕРС. Тоді струм якоря визначають з формули електричної рівноваги ![]() :
:
![]() .
.
При такому струмі якоря оберти двигуна збільшуватимуться доти, доки не зрівняються обертальний і гальмівний моменти (точка 1'). Потім виводять черговий ступінь пускового реостата, і струм якоря збільшується (точка 2), а отже, збільшується момент і кількість обертів (точка 2'). Так, поступово виводячи пусковий реостат, доводять оберти двигуна до номінальних (точка 3'). Струм в якорі при цьому дорівнюватиме:
![]() .
.
3.2 Регулювання швидкості обертання та реверсування двигунів постійного струму
Регулювання швидкості обертання двигунів з паралельним збудженням.
Якщо в коло якоря ввімкнено регулювальний реостат ![]() , то швидкість обертання двигуна з паралельним збудженням визначають за формулою:
, то швидкість обертання двигуна з паралельним збудженням визначають за формулою:
 .
.
З формули видно, що швидкість обертання двигуна можна регулювати трьома способами: змінами опору кола якоря; магнітного потоку Ф (струму збудження); напруги U , підведеної до двигуна.
3.2.1 Регулювання швидкості обертання двигуна зміною опору кола якоря
Схему регулювання швидкості обертання двигуна показано на рис. 3.2.1.1, де пусковий реостат ![]() виконує функцію регулювального реостата. Обмотку збудження вмикають на повну напругу мережі, внаслідок чого утворюється сталий магнітний потік Ф
.
виконує функцію регулювального реостата. Обмотку збудження вмикають на повну напругу мережі, внаслідок чого утворюється сталий магнітний потік Ф
.
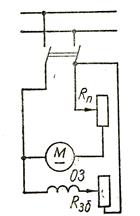
Рис. 3.2.1.1. Електрична схема двигуна постійного струму з паралельним збудженням
Припустімо, що гальмівний момент на валу двигуна залишається сталим і не залежить від швидкості обертання. Якщо при цій умові зменшити опір регулювального реостата, то в перший момент швидкість обертання n
внаслідок інерції не встигне змінитися. У зв’язку з цим не зміниться і проти-ЕРС, оскільки ![]() . Тоді струм якоря, що визначають за формулою
. Тоді струм якоря, що визначають за формулою ![]() , збільшується обернено пропорційно опору (
, збільшується обернено пропорційно опору (![]() ). Внаслідок цього порушуєтсья рівновага між обертальним і гальмівним моментами (обертальний момент стає більшим за гальмівний момент). Швидкість обертання двигуна і його проти-ЕРС збільшується, а струм якоря
). Внаслідок цього порушуєтсья рівновага між обертальним і гальмівним моментами (обертальний момент стає більшим за гальмівний момент). Швидкість обертання двигуна і його проти-ЕРС збільшується, а струм якоря ![]() зменшуватиметься доти, поки не досягне свого попереднього значення. Обертальний момент при цьому дорівнюватиме гальмівному моменту при новій більшій швидкості обертання. Якщо при сталих опорах у колі якоря збільшувати гальмівний момент, то швидкість обертання двигуна спадатиме. Цей спосіб дає можливість регулювати швидкість обертання двигуна в досить широких межах, але він невигідний через великі втрати в реостаті й зменшення ККД.
зменшуватиметься доти, поки не досягне свого попереднього значення. Обертальний момент при цьому дорівнюватиме гальмівному моменту при новій більшій швидкості обертання. Якщо при сталих опорах у колі якоря збільшувати гальмівний момент, то швидкість обертання двигуна спадатиме. Цей спосіб дає можливість регулювати швидкість обертання двигуна в досить широких межах, але він невигідний через великі втрати в реостаті й зменшення ККД.
Якщо паралельно працюють кілька двигунів, наприклад, у трамваях, то швидкість їх обертання регулюють одночасно реостатом і зміною електричної схеми з’єднання двигунів. Заміннюючи послідовне з’єднання мішаним і потім паралельним, збільшують оберти двигунів. Усі перемикання виконують з допомогою спеціального перемикача – контролера.
3.2.2 Регулювання швидкості обертання двигуна зміною магнітного потоку
Припустімо, що гальмівний момент двигуна і напруга залишається сталими і не залежить від швидкості обертання двигуна. Якщо зменшити опір у колі збудження, то струм збудження і магнітний потік Ф
також збільшується. У перший момент швидкість обертання n
внаслідок інерції не зміниться. З рівняння ![]() видно, що збільшення магнітного потоку Ф
спричинить зменшення струму в якорі
видно, що збільшення магнітного потоку Ф
спричинить зменшення струму в якорі ![]() . Оскільки проти-ЕРС є набагато більша від спаду напруги
. Оскільки проти-ЕРС є набагато більша від спаду напруги ![]() у колі якоря, то навіть при невеликому збільшенні магнітного потоку Ф
струм в якорі різко зменшується. Внаслідок цього обертальний момент стає меншим, ніж гальмівний, і швидкість двигуна n
та проти-ЕРС зменшуватимуться, а струм якоря почне збільшуватися доти, поки не поновиться рівновага між моментами. При цьому способі регулювання швидкості ККД двигуна майже не змінюється.
у колі якоря, то навіть при невеликому збільшенні магнітного потоку Ф
струм в якорі різко зменшується. Внаслідок цього обертальний момент стає меншим, ніж гальмівний, і швидкість двигуна n
та проти-ЕРС зменшуватимуться, а струм якоря почне збільшуватися доти, поки не поновиться рівновага між моментами. При цьому способі регулювання швидкості ККД двигуна майже не змінюється.
При холостому ході криву ![]() при
при ![]() називають характеристикою холостого ходу двигуна. При великих значеннях струму збудження крива
називають характеристикою холостого ходу двигуна. При великих значеннях струму збудження крива ![]() зменшується набагато (впливає насичення індуктора) і далі йде майже паралельно осі абсцис.
зменшується набагато (впливає насичення індуктора) і далі йде майже паралельно осі абсцис.
При певному навантаженні двигуна і сталій напрузі крива ![]() буде подібною, але розміщується трохи нижче.
буде подібною, але розміщується трохи нижче.
3.2.3 Регулювання швидкості обертання зміни, підведеної до двигуна напруги
Напругу на затискачах двигуна регулюють зміною напруги генератора, що живить двигун. У цьому разі обмотка збудження двигуна живиться від окремого джерела (незалежне збудження).
Регулювання швидкості обертання двигуна з послідовним збудженням.
Швидкість обертання двигунів з послідовним і паралельним збудженням визначають за формулою:
.
Швидкість обертання двигуна послідовного збудження можна регулювати трьома способами: змінами опору кола якоря; магнітного потоку Ф статора; напруги U , підведеної до двигуна.
Регулювання швидкості обертання двигуна зміною опору кола якоря. Регулювання двигуна таким способом аналогічне регулюванню двигуна з паралельним збудженням. Здійснюється таке регулювання реостатом ![]() .
.
3.2.4 Регулювання швидкості обертання двигуна зміною магнітного потоку Ф
Магнітний потік в обмотці збудження двигуна змінюють шунтуючим реостатом ![]() . Якщо двигун має сталий гальмівний момент, незалежний від швидкості обертання, то при вимкненому рубильнику Р
струм збудження дорівнюватиме струму якоря
. Якщо двигун має сталий гальмівний момент, незалежний від швидкості обертання, то при вимкненому рубильнику Р
струм збудження дорівнюватиме струму якоря ![]() . При цьому обертальний електромагнітний момент визначиться за формулою:
. При цьому обертальний електромагнітний момент визначиться за формулою: ![]() , а рівняння електричної рівноваги буде
, а рівняння електричної рівноваги буде ![]() (пусковий реостат повністю виведений). Оскільки спад напруги
(пусковий реостат повністю виведений). Оскільки спад напруги ![]() дуже малий, то, нехтуючи ним, матимемо
дуже малий, то, нехтуючи ним, матимемо ![]() . Отже, при сталій напрузі
. Отже, при сталій напрузі ![]() на затискачах двигуна швидкість обертання n
і магнітний потік Ф
залежать один від одного. Якщо ввімкнено рубильник Р1
, то струм в обмотці якоря збільшується, внаслідок чого обертальний момент стане більшим, ніж гальмівний, і швидкість обертання двигуна збільшуватиметься.
на затискачах двигуна швидкість обертання n
і магнітний потік Ф
залежать один від одного. Якщо ввімкнено рубильник Р1
, то струм в обмотці якоря збільшується, внаслідок чого обертальний момент стане більшим, ніж гальмівний, і швидкість обертання двигуна збільшуватиметься.
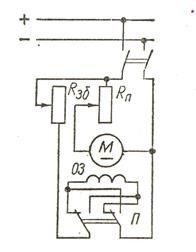
Рис. 3.2.4.1. Схема реверсування двигуна постійного струму з паралельним збудженням
Процес зміни швидкості обяртання найбільш економічний і дає можливість плавно регулювати обертання двигуна.
Напрям дії обертального моменту двигуна можна змінити напрямом струму якоря І1 , або змінити напрям струму збудження. Схему реверсування двигуна з паралельним збудженням показано на схемі 3.2.4.1. Напрям струму в обмотці збудження змінюють перемикачем П .
3.3 Характеристика двигунів постійного струму
Властивості всіх електричних двигунів і, зокрема, постійного струму визначають за сукупністю трьох видів характеристик: пускових, робочих і регулювальних.
Пускові характеристики визначають властивості двигуна від моменту пуску до переходу його до усталеного режиму роботи. До цих характеристик належать пусковий струм ![]() , пусковий момент
, пусковий момент ![]() , час пуску і т.п.
, час пуску і т.п.
Робочі характеристики визначають властивості двигуна при усталеному режимі роботи. До них належать залежність n
,
M
,
![]() і
і![]() при
при ![]() . До робочих характеристик належить і механічна характеристика двигуна
. До робочих характеристик належить і механічна характеристика двигуна ![]() при
при ![]() і
і ![]() .
.
Регулювальні хаарктеристмики визначають властивості двигунів при регулюванні швидкості їх обертання. До них належать межі й характер регулювання (плавний чи ступінчастий), а також простота і надійність регулюючої апаратури.
Розглянемо робочі характеристики двигунів з паралельним і послідовним збудженням.
3.3.1 Робочі характеристики двигунів з паралельним збудженням
Робочі характеристики двигуна з паралельним збудженням показано на рисунку 3.3.1.1. Вони є виразом залежності швидкості обертання n
від струму якоря ![]() , електромагнітного моменту М
і ККД η
від корисної потужності Р2
на валу двигуна при сталій номінальній напрузі
, електромагнітного моменту М
і ККД η
від корисної потужності Р2
на валу двигуна при сталій номінальній напрузі ![]() на його затискачах і сталому струмі збудження
на його затискачах і сталому струмі збудження ![]() , тобто n
,
M
,
, тобто n
,
M
,
![]() і
і ![]() при
при ![]() і
і ![]() .
.
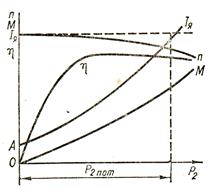
Рис. 3.3.1.1. Робочі характеристики двигуна з паралельним збудженням
Іноді розглядають залежність ![]() і
і ![]() від корисного моменту валу
від корисного моменту валу ![]() , або залежність
, або залежність ![]() і
і ![]() від струму в якорі
від струму в якорі ![]() .
.
Швидкісна характеристика ![]() .
.
При номінальній напрузі і відсутності навантаження (холостий хід) струм якоря буде незначним і визначиться ординатою ОА.
Збільшення навантаження на валу двигуна є збільшенням гальмівного моменту. При цьому оберти двигуна і проти-ЕРС повільно зменшуються. І з зменшенням проти-ЕРС струм якоря збільшиться, а це зумовить збільшення обертального моменту двигуна, оскільки він пропорційний струму.
Обертальний момент збільшуватиметься доти, поки не зрівняється з гальмівним моментом. При цьому встановлюється нова постійна швидкість обертання, яка відповідає новому навантаженню двигуна. У цьому полягає принцип саморегулювання двигунів. Зменшення швидкості обертання при навантаженні двигуна становить всього 5-10 % номінальних обертів. Це пояснюється тим, що магнітний потік, створений струмом обмотки збудження, при всіх навантаженнях залишається сталим Ф
~ ![]() , а результуючий магнітний потік із збільшенням навантаження трохи зменшується завдяки реакції якоря, що веде до збереження швидкості двигуна.
, а результуючий магнітний потік із збільшенням навантаження трохи зменшується завдяки реакції якоря, що веде до збереження швидкості двигуна.
Залежність моменту і струму якоря від навантаження: М
і ![]() . При сталих обертах
. При сталих обертах ![]() корисний обертальний момент буде пропорційний корисній потужності й крива
корисний обертальний момент буде пропорційний корисній потужності й крива ![]() перетвориться в пряму. Із збільшенням навантаження швидкості обертання n
зменшується, отже, щоб потужність Р2
була так само корисною, обертальному моменту М
треба мати більше значення, ніж при
перетвориться в пряму. Із збільшенням навантаження швидкості обертання n
зменшується, отже, щоб потужність Р2
була так само корисною, обертальному моменту М
треба мати більше значення, ніж при ![]() . Тому крива
. Тому крива ![]() із збільшенням навантаження відхиляється в бік більших значень.
із збільшенням навантаження відхиляється в бік більших значень.
Згідно з формули ![]() при
при ![]() струму якоря
струму якоря ![]() треба б змінюватися прямо пропорційно моменту, але потік Ф
при збільшенні навантаження трохи зменшується внаслідок розмагнічуючої дії реакції якоря. Отже, для створення того самого моменту струму якоря
треба б змінюватися прямо пропорційно моменту, але потік Ф
при збільшенні навантаження трохи зменшується внаслідок розмагнічуючої дії реакції якоря. Отже, для створення того самого моменту струму якоря ![]() треба мати більше значення, ніж при
треба мати більше значення, ніж при ![]() . Тому крива
. Тому крива ![]() більше вигнута, ніж крива
більше вигнута, ніж крива ![]() .
.
Залежність ККД двигунів від Р2 .
ККД двигуна визначається формулою
![]() ,
,
де ![]() – повна споживна потужність, а
– повна споживна потужність, а ![]() – сумарні втрати в двигуні.
– сумарні втрати в двигуні.
При холостому ході ![]() .
.
При невеликому, але зростаючому навантаженні сумарні втрати (в основному втрати на тертя) залишаються практично сталими. ККД при цьому зростає, бо чисельник рівняння ![]() зростає швидше, ніж знаменник. При значному навантаженні дуже зростають втрати в обмотці якоря, тому що вони пропорційні квадрату струму. При навантаженні 0,7 – 0,8 % від номінального ККД двигуна починає зменшуватися.
зростає швидше, ніж знаменник. При значному навантаженні дуже зростають втрати в обмотці якоря, тому що вони пропорційні квадрату струму. При навантаженні 0,7 – 0,8 % від номінального ККД двигуна починає зменшуватися.
Механічна характеристика двигуна з паралельним збудженням є залежністю ![]() при
при ![]() ,
, ![]() і
і ![]() .
.
Враховуючи
![]()
і зробивши невеликі перетворення, матимемо рівняння залежності швидкості обертання від моменту:
![]() .
.

Рис. 3.3.1.2. Механічні характеристики двигуна з паралельним збудженням
На рисунку 3.3.1.2 показано механічну характеристику двигуна паралельного збудження (при цьому нехтують реакцією якоря).
Властивість двигуна з паралельним збудженням зберігати майже незмінною швидкість обертання при значних змінах навантаження широко використовують на практиці.
3.3.2 Характеристка двигуна з послідовним збудженням
Робочі характеристики двигуна з послідовним збудженням аналогічні тим самим залежностям для двигуна з паралельним збудженням, а саме: n
,
M
,
![]() і
і ![]() при
при ![]() або
або ![]() і
і ![]() при
при ![]() .
.
Швидкісна характеристика ![]() або
або ![]() при
при ![]() .
.
Зауважимо, що істотної різниці між характеристиками ![]() і
і ![]() немає, тому що при
немає, тому що при ![]() Р2
~ Ія
.
Р2
~ Ія
.
У двигуні з послідовним збудженням струм збудження є водночас і струмом навантаження ![]() , тому двигун не має характеристики холостого ходу
, тому двигун не має характеристики холостого ходу ![]() . Магнітний потік двигуна з послідовним збільшенням залежить від завантаження. При збільшенні навантаження двигуна в перший момент порушується рівновага обертального і гальмівного моментів. Оберти вала почнуть зменшуватися, що приведе до збільшення струму якоря
. Магнітний потік двигуна з послідовним збільшенням залежить від завантаження. При збільшенні навантаження двигуна в перший момент порушується рівновага обертального і гальмівного моментів. Оберти вала почнуть зменшуватися, що приведе до збільшення струму якоря ![]() і обертального моменту М
, який зростатиме доти, поки не зрівняється з гальмівним моментом. Оберти вала почнуть зменшуватися, що приведе до збільшення струму якоря
і обертального моменту М
, який зростатиме доти, поки не зрівняється з гальмівним моментом. Оберти вала почнуть зменшуватися, що приведе до збільшення струму якоря ![]() і обертального моменту М
, який зростатиме доти, поки не зрівняється з гальмівним моментом.
і обертального моменту М
, який зростатиме доти, поки не зрівняється з гальмівним моментом.
Отже, швидкість обертання двигуна із збільшенням навантаження зменшується. Якщо нехтувати спадом напруги в колі якоря та реакцією якоря і вважати, що магнітна система двигуна не насичена, то магнітний потік буде пропорційний струму якоря Ф
~ ![]() . Число обертів можна зобразити таким співвідношенням:
. Число обертів можна зобразити таким співвідношенням:
![]() .
.
Це співвідношення показує, що із збільшенням навантаження швидкісна характеристика ![]() або
або ![]() нагадуватиме гіперболу. З кривої видно, що при зменшенні навантаження до нуля швидкість обертання безмежно збільшується. Насправді це не так, бо при холостому ході струм у якорі не дорівнюватиме нулю. Тому швидкість обертання двигуна при холостому ході хоч і не дорівнюватиме нескінченності, проте значно перевищуватиме номінальну швидкість (у 4-6 раз), що з погляду механіки не допустимо для двигуна (розрив бандажів, псування обмотки якоря тощо). Ось чому двигун послідовного збудження слід ставити в такі умови, при яких холостий хід двигуна був би неможливим.
нагадуватиме гіперболу. З кривої видно, що при зменшенні навантаження до нуля швидкість обертання безмежно збільшується. Насправді це не так, бо при холостому ході струм у якорі не дорівнюватиме нулю. Тому швидкість обертання двигуна при холостому ході хоч і не дорівнюватиме нескінченності, проте значно перевищуватиме номінальну швидкість (у 4-6 раз), що з погляду механіки не допустимо для двигуна (розрив бандажів, псування обмотки якоря тощо). Ось чому двигун послідовного збудження слід ставити в такі умови, при яких холостий хід двигуна був би неможливим.
Залежність моменту двигуна від Р2 .
При ненасиченій магнітній системі можна вважати, що магнітний потік прямо пропорційний струму Ф ~ І . Тоді з формули
![]()
маємо:
![]() .
.
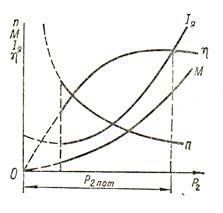
Рис. 3.3.2.1. Робочі характеристики двигуна з послідовним збудженням
Отже, момент двигуна змінюється пропорційно квадрату струму, тому крива ![]() подібна параболі на рисунку 3.3.2.1. Але в міру збільшення струму якоря при збільшенні навантаження Р2
настає насичення магнітної системи машини. Тому
подібна параболі на рисунку 3.3.2.1. Але в міру збільшення струму якоря при збільшенні навантаження Р2
настає насичення магнітної системи машини. Тому ![]() і крива обертального моменту наближається до прямої лінії.
і крива обертального моменту наближається до прямої лінії.
3.3.3 Залежність ККД двигуна від Р2
Залежність ККД двигуна з послідовним збудженням від навантаження має характер, аналогічний такій самій залежності двигуна паралельного збудження.
Механічна характеристика.
Як було вже зазначено, у двигунах з послідовним збудженням струм збудження дорівнює струму навантаження:
![]() .
.
Для ненасиченої машини основний магнітний потік Ф
пропорційний струму якоря ![]() .
.
Враховуючи це, електромагнітний момент ![]() можна показати такою формулою:
можна показати такою формулою:
![]() ,
,
Звідки
 .
.
Враховуючи , число обертів двигуна можна подати таким рівнянням:
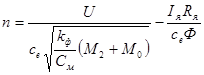 .
.
Рівняння є механічною характеристикою двигуна послідовного збудження.
4. Вимірювальні і контрольні інструменти
Інструменти поділяються на вимірювальні та контрольні.
4.1 Вимірювальні інструменти
Вимірювальні інструменти – мікрометри, штангенциркулі, мікрометричні штихмаси, рівні валові та гідростатичні, щупи для вимірювання повітряних зазорів між площинами напівмуфт, динамометри пружинні, рулетки стальні, металева лінійка, лінійки перевірні стальні довгі.
4.2 Мікрометри, штангенциркулі, штихмаси
Мікрометрами вимірюють довжини та зовнішні діаметри розміром до 1000 мм, штангенциркулями – довжини деталей машини та діаметри отворів розміру до 2000 мм, штихмасами – внутрішні діаметри (напівмуфт статорів) або відстань між двома поверхнями.
4.3 Валовий та гідростатичний рівні
Валовий рівень – вимірювальний інструмент, застосовується при центруванні валів при установці вала першої із машин агрегата в нормальне положення. Спеціальна форма виїмки в основі рівня зроблена для того, щоб він міг стійко утримуватись на циліндричній поверхні вала.
Рівнем визначається прогин вала і виконується його встановлення в положення з визначеним нахилом його шийок в підшипниках. Родільне биття сердечника ротора відносно шийок вала перевіряється індикатором.
Гідростатичний рівень призначений для грубого встановлення і вивіряння підшипників у горизонтальній площині, складається з двох скляних трубок з кришками і з’єднання гумовою трубкою, довжина якої залежить від відстані між поверхнями, які вимірюються.
4.4 Мірні інструменти для пробного запуску
Мірні інструменти для пробного запуску – мегометр, віброметр, тахометр, секундомір, компас, ртутні термометри і термопари.
4.5 Такелажні пристосування
Такелажні пристосування – канати стальні і пенькові, стропи, коуші і зажими, коромисла, полозки з катками, знімачі для з няття шківів та напівмуфт, знімачі для зняття шариків підшипника.
4.6 Монтажні пристосування і механізми
Монтажні пристосування і механізми – пристосування для виймання і заводження роторів, для зняття і насаджування муфт, шківів підшипників кочення для підйому кінця вала на декілька мм, для центурвання валів, пневмоінструменти, механізми для шліфування, проточування, пониження величини ізоляції з прочищенням каналу ізоляції між пластинами колектора, міхи, пило смок, пульверизатор, верстат для протирання щіток, електричні паяльники, слюсарні ножиці по металу, клинові домкрати для регулювання висоти рам.
4.7 Такелажні механізми, матеріали та інструменти для такелажних робіт
Такелажні механізми – лебідки, тали, блоки, домкрати гвинтові, гідравлічні.
Матеріали та інструменти для такелажних робіт – шпали, бруси, доски, труби стальні, кувалди, молотки, пили, сокири, бури, зубила, ломи.
5. Матеріали, що застосовуються при виконанні роботи
Виготовлення обмоток при ремонті електричних машин пов’язано з необхідністю приймання різних електротехнічних матеріалів більшої номенклатури, різних можливостей, призначення.
Ці матеріали можуть бути поділені на три основних групи. Одну із цих груп складають провідникові матеріали, другу – електроізоляційні, а третю – припої.
Провідникові матеріали
До групи провідникових матеріалів відносяться обмоткові провода, які виготовляють із електролітичної обпаленої міді ММ (мід м’яка) і МТ (мідь тверда).
Мідні обмотки ізолюють лаками, хлопчастобумажною пражею, скловолокном, деталі – азбестом і ін..
До газоподібних провідникових матеріалів відносять всі гази та пари, а також пари матеріалів.
До рідких провідників відносять розплави металів і розчини (зокрема водяні), а також розплави солей, кислот та інших речовин з іонною будовою молекул.
До твердих провідників відносять метали та сплави.
Провідникові матеріали мають механічні, фізико-хімічні та технологічні властивості.
Електроізоляційні матеріали
Електроізоляційний картон ЗВ, ЕВС і ЕВТ при товщині до 0,5 мм випускають в рулонах і листах, а вище 0,5 мм – тільки в листах розмірами 900 х 900, 900 х 1000, 1000 х 1000 мм і застосовують для ізоляції обмоток електронних машин в якості прокладок.
Хлопчастобумажна стрічка виготовляється із хлопчастобумажної пряжі різного плетення у вигляді тканинних смужок товщиною 0.12-0,45 мм і шириою 10-60 мм і застосовується для захисту обмоток від механічних пошкоджень.
Просочувальний лак № 447 – пічного сушіння середньої жирності являє собою масляно-бітумний розчин. В якості розчинників застосовують толуол, ксилол, сольвейг та бензин. Тривалість висихання лаку при температурі 100 градусів – 6 годин. Лак № 447 застосовують для насичення обмоток електричних машин, працюючих при підвищених перегрівах та в умовах підвищеної вологості.
Емаль ГФ-92ХС (б. СВД) виготовлена на основі масляно-глифталевого лаку з веденням сикативу. Пігментами емалі є литопон і піролюзит, а розчинниками – уайтспірит, толуол і бензол.
З’єднання проводів обмоток електричних машин відбувається за допомогою зварювання або паяння припоями. В залежності від температури плавленя припої бувають м’які і тверді.
Припої складаються в основному із сплава олова і свинця, мають низку температуру плавлення і тому їх називають м’якими. При ремонті електричних машин застосовують м’які припої ПОС-30, ПОС-40 і ПОС-60.
Мідно-фосфористі і срібні припої є твердими. Мідно-фосфористий ПМФ-7 складається з 92 % міді і 8 % фосфора; температура його плавлення становить – 750-800ºС. Срібні припої ПСр складаються в основному із сплаву срібла (25-65 %) і міді; температура плавлення – 725-800ºС.
Через велику вартість і дефіцит припої з великим вмістьм олова та срібла застосовують дуже рідко.
Хлоркаучук одержують при хлоруванні каучуку. Він має добрі електроізоляційні властивості, стійкість проти дії кислот, лугів, хлору, але розчиняється в ароматичних вуглеводах; негорючий і має низьку нагрівостійкість.
Ізомеризований каучук одержують при обробці каучуку в присутності кислого каталізатора – сірчаної кислоти. Він має електроізоляційні властивості і водостійкість вищі, ніж у хлоркаучуку, стійкий проти дії кислот, лугів і розчинників.
6. Техніка безпеки
Виводи обмоток і кабельні воронки в електродвигунів повинні бути огороджені, зняття огородження має бути можливим тільки після відкручування гайок і відгвинчування болтів. Знімати ці огородження під час роботи електродвигуна забороняється. Частини електродвигунів, які обертаються, контактні кільця, шківи, муфти, вентилятори мають бути загороджені.
Операції по відмиканню і вмиканню електродвигунів напругою вище 1000 В пусковою апаратурою з приводами ручного управління повинні проводитись із застосуванням діелектричних рукавиць та ізолюючого килима.
Дистанційне ввімкнення і вимкнення вимикачів електродвигунів виконується черговими агрегатів одноосібно.
Догляд за щітками, їїх заміну на працюючому електродвигуні допускається виконувати одному працівнику оперативного персоналу чи спеціально навченим особам з кваліфікаційною групою не нижче 3 розряду при дотриманні наступних заходів обережності:
а) працюючі повинні остерігатись захоплення одежі чи обтирального матеріалу частинами машин, які обертаються;
б) робота повинна виконуватись в нарукавниках, які стягуються на зап’ястках;
в) у збудників з боку колекторів і біля кілець ротора повинні бути розстелені гумові діелектричні килимки, або робота повинна виконуватись в діелектричних галошах;
г) забороняється торкатись руками одночасно струмоведучих частин різної полярності, чи струмоведучих частин і заземлення. Інструмент повинен бути з ізольованими ручками.
У працюючого двохшвидкісного двигуна обмотка, яка не використовується, і кабель, який її живить, повинні розглядатися як ті, що знаходяться під напругою. Робота в колі пускового реостата двигуна, який обертається, допускається лише при піднятих щітках і замкнутому накоротко роторі. Робота в колах реостата регулювання двигуна, що обертається, повинна розглядатись, як робота під напругою в колах до 1000 В, і виконується з дотриманням мір обережності. Шліфування кілець ротора дозволяється виконувати на двигуні, який обертається лише при допомозі колодок із ізоляційного матеріалу.
Використана література
1. Зюзин А.Ф., Поконов Н.З., Вишток А.М. Монтаж, эксплуатация и ремонт электрооборудования промышленных предприятий и установок. – Москва: «Высшая школа», 1980.
2. Принц М.В., Цимбалістий В.М. Електричні мережі, монтаж, обслуговування та ремонт. – Львів: Видавництво Оріяна-Нова, 2005.
3. Принц М.В., Цимбалістий В.М. Освітлювальне і силове електроустаткування, монтаж та обслуговування, ремонт. – Львів: Видавництво Оріяна-Нова, 2005.
4. Атабеков В.Б. Ремонт электрооборудования промышленных предприятий. – Москва: «Высшая школа», 1979.
5. Журавльова Л.В., Бондар В.М. Електроматеріалознавство. – Київ: «Грамота», 2006.
6. Вартабедян В.А. Загальна електротехніка. – Київ: Головне видавництво «Вища школа», 1986.
Похожие рефераты:
Розвиток і вдосконалення льотної промисловості України
Електропоїзди постійного струму
Технічне обслуговування й ремонт електричних машин
Сенсорний вимикач з пультом дистанційного керування
Розробка змісту тестового контролю навчальних досягнень учнів з теми "Постійний струм"
Технічні характеристики зварювальних агрегатів з двигунами внутрішнього згорання
Вимірювання електричних струмів і напруг
Проектування автоматизованого електропривода візка мостового крану
Трансформатор силовий трифазний потужністю 740 кВА
Розробка інвертора напруги для апаратури зв'язку
Теоретичні основи електротехніки
Технологія монтажу, ремонту та правила технічного обслуговування синхронних двигунів
Розрахунок магістрального конвеєрного штреку
Розрахунок параметрів і вибір елементів тиристорних електроприводів постійного струму
Автоматизована система керування заводу по виготовленню цегли