| Похожие рефераты | Скачать .docx |
Дипломная работа: Применение магнетронных генераторов большей мощности в радиолокационных системах
ВВЕДЕНИЕ
В связи с развитием авиации, появлением новых высокоскоростных самолетов в настоящее время огромное внимание уделяется вопросам безопасности полетов и разработке новых систем обеспечения.
Существующие радиолокаторы, предназначенные для выявления небезопасных для полета областей активной грозовой деятельности, определения угла заноса самолета, а так же наблюдения за земной поверхности с целью ориентирования не могут решать поставленные задачи из-за малой дальности действия. По этому весьма актуальным вопросом является применение в существующих радиолокаторах магнетронов большей мощности. Возможна модернизация существующих радиолокаторов, которые выполнены в виде функционально законченных и в соответствующих комплектациях устанавливаются на самолетах гражданской и транспортной авиации Як-40, Як-42, Ил-62, Ил-86, Ан-24, Ан-26, Ан-30, Ан-32, Ту-134, Ту-154.
1 АНАЛИЗ МАГНЕТРОННЫХ ГЕНЕРАТОРОВ
Магнетронные генераторы, находящие сейчас широкое применение, имеют большую и сложную историю развития.
Поведение диодов в магнитном поле явилось предметом многочисленных опытов вскоре после создания первых электронных ламп. Сверхвысокочастотные колебания в диодах, помещенных в постоянное магнитное поле, были обнаружены еще в 1920—1924 гг. Толчком к этим исследованиям в значительной мере явились эксперименты по возбуждению колебаний в схеме тормозящего поля.
Установлено, что существуют три основных типа колебаний в магнетронах, различающихся своим электронным механизмом:
1)колебания циклотронного типа;
2)колебания типа отрицательного сопротивления;
3)колебания типа бегущей волны.
Наибольший практический интерес представляют колебания типа бегущей волны, которые происходят в многорезонаторных магнетронах, разработанных впервые в 1938—1940 гг. Н. Ф. Алексеевым и Д. Е. Маляровым. Этому типу колебаний уделяется в дальнейшем основное внимание.
Развитие многорезонаторных магнетронов привело к разработке мощных высокоэффективных автогенераторов, играющих важнейшую роль в технике СВЧ. Вместе с тем разработки и исследования магнетронных генераторов стимулировали появление большого класса приборов СВЧ магнетронного типа — ламп бегущей волны М-типа, ламп обратной волны М-типа и платинотронов. Общим признаком магнетронов и других приборов М-типа является присутствие в междуэлектродном пространстве скрещенных постоянных электрического и магнитного полей.
Устройство типичного многорезонаторного магнетрона показано схематически на рисунке 1.1. Анодом магнетрона является сплошной цилиндрический медный блок, разделенный на сегменты продольными щелями. Эти щели входят в состав полых резонаторов, расположенных на равных расстояниях по окружности анода. Катод магнетрона имеет цилиндрическую форму и расположен внутри анода вдоль его оси.
Постоянное магнитное поле В направлено вдоль оси прибора, т. е. перпендикулярно плоскости чертежа на второй проекции (рис. 1.1).
Постоянное или импульсное анодное напряжение ![]() приложено между катодом и анодом и создает электрическое поле, перпендикулярное к направлению магнитного поля. Вывод СВЧ энергии производится обычно от одного из резонаторов, например, с помощью петли и коаксиальной линии.
приложено между катодом и анодом и создает электрическое поле, перпендикулярное к направлению магнитного поля. Вывод СВЧ энергии производится обычно от одного из резонаторов, например, с помощью петли и коаксиальной линии.
Анализ работы многорезонаторных магнетронов показывает, что их действие можно наглядно рассматривать на основе бегущих волн, распространяющихся по внутренней поверхности анодного блока, обращенной к катоду. Это и послужило основанием для названия "колебания типа бегущей волны".
В пространстве взаимодействия между катодом и анодом магнетронов происходят все процессы, которые должны присутствовать в любом электронном генераторе и усилителе СВЧ: управление электронным потоком, образование сгустков и отдача энергии высокочастотному электрическому полю. В магнетронах нет разделенных в пространстве областей управления, группировки и отдачи энергии, которые имеются, например, в клистронах. Это обстоятельство, наряду со сложным характером движения электронов, значительно осложняет изучение процессов в магнетронах. Тем не менее, пользуясь представлениями о видах колебаний и методом эквивалентных схем в сочетании с расчетом движения электронов, оказывается возможным и в этом случае использовать общие методы.
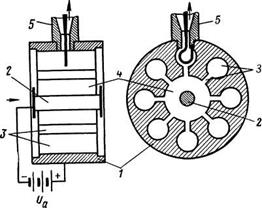
Рисунок 1.1 - Схема устройства и включения магнетронного генератора: 1-анодный блок; 2-катод; 3-резонатор типа щель-отверстие; 4- пространство взаимодействия; 5 – вывод энергии
1.1 Движение электронов в статическом магнетроне
Прежде чем перейти к проблеме возбуждения СВЧ колебаний, рассмотрим задачу о движении электронов в скрещенных электрическом и магнитном полях в отсутствие колебаний.
Катод магнетрона, как правило, имеет цилиндрическую форму и расположен концентрично внутри цилиндрического анода. Отвлечемся от искажений постоянного электрического поля, вызываемых щелями в поверхности анода, и рассмотрим систему со сплошным анодом, изображенную на рисунке 1.2, а. Постоянное магнитное поле предположим направленным точно вдоль оси г. Пространственный заряд, создаваемый двигающимися электронами, учитывать не будем.
Пренебрегать действием пространственного заряда (коллективным взаимодействием электронов) в электронных приборах можно лишь с известной осторожностью. Особенно важно помнить об этом в случае магнетрона, так как под действием магнитного поля пространственный заряд может значительно увеличиться. Однако строгое решение задачи магнетрона с учетом пространственного заряда наталкивается на большие трудности. Многие важные свойства магнетронов могут быть рассмотрены независимо от присутствия и распределения пространственного заряда.
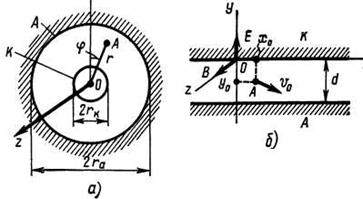
Рисунок 1.2 - К расчету движения электронов в цилиндрическом и плоском магнетронах со сплошным анодом в статистическом режиме. Электрон находится в точке А
Электроны эмитируются катодом с очень малыми начальными скоростями, поэтому величиной начальной скорости в статистическом режиме магнетрона можно сразу пренебречь. Однако при рассмотрении других ламп СВЧ со скрещенными электрическими и магнитным полями полезно общее решение, учитывающее начальную скорость электрона, начавшего свое движение из произвольной точки в пределах пространства взаимодействия. Учет начальных скоростей необходим также при анализе сортировки электронов в магнетронных генераторах в присутствии колебаний.
Расчеты движения электронов производится с наиболее простой плоской системы, изображенной на рис. 1.2, б. Рассмотрение плоского магнетрона важно не только с точки зрения простоты математического решения. Большинство современных магнетронов имеют катоды большого диаметра, что позволяет приближенно заменить катод и анод параллельными плоскостями.
1.2 Условия самовозбуждения
Рассмотрим сначала случай, когда отношение радиусов катода и анода магнетрона близко к единице, т. е. система электродов близка к плоской. Примем, что условием отдачи электронами максимальной энергии высокочастотному полю является совпадение фазовой скорости бегущей волны и средней скорости движения электронов в отсутствие колебаний. При этом всякое первоначальное колебание, возникающее в анодном блоке магнетрона, должно нарастать до тех пор, пока не начнут действовать ограничивающие нелинейные эффекты.
Используем уравнение, определяющее фазовую скорость волны ![]() -вида
-вида ![]() -й пространственной гармоники. Чтобы получить условие усредненного синхронизма между электронами и волной, вместо радиуса анода r
а
подставим средний радиус пространства взаимодействия, равный
-й пространственной гармоники. Чтобы получить условие усредненного синхронизма между электронами и волной, вместо радиуса анода r
а
подставим средний радиус пространства взаимодействия, равный
![]() . (1.1)
. (1.1)
Таким образом, средняя фазовая скорость волны в пространстве взаимодействия составляет:
![]() . (1.2)
. (1.2)
Средняя скорость движения электронов равна ![]() . Отсюда условие синхронизма может быть записано в виде:
. Отсюда условие синхронизма может быть записано в виде:
![]() . (1.3)
. (1.3)
В рассматриваемой системе напряженность постоянного электрического поля можно выразить в виде ![]() Подставляя эту величину в предыдущее уравнение и учитывая, что генерируемая частота определяется в основном резонансной частотой данного вида колебаний, т.е. что
Подставляя эту величину в предыдущее уравнение и учитывая, что генерируемая частота определяется в основном резонансной частотой данного вида колебаний, т.е. что ![]() , имеем:
, имеем:
![]() (1.4)
(1.4)
Согласно этому уравнению анодное напряжение, при котором должно происходить самовозбуждение многорезонаторного магнетрона, для каждого вида колебаний при фиксированном номере гармоники ![]() линейно связано с индукцией магнитного поля. Отношение
линейно связано с индукцией магнитного поля. Отношение ![]() есть величина постоянная для данного магнетрона при заданных значениях
есть величина постоянная для данного магнетрона при заданных значениях ![]() и
и ![]() .
.
На рисунке 1.3, а
построены соответствующие графики для трех видов колебаний 8-резонаторного магнетрона при ![]() Здесь же построена парабола критического режима.
Здесь же построена парабола критического режима.
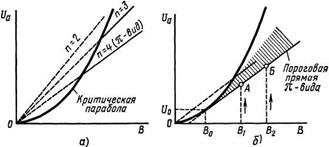
Рисунок 1.3 - Самовозбуждение магнетрона: а ) – для упрощенного случая при N=8, б)– для ![]() -вида колебаний
-вида колебаний
Прямые, определяемые уравнением (1.4), проходят через начало координат и пересекают критическую параболу. С физической точки зрения понятно, что при ![]() генерация колебаний типа бегущей волны невозможна: все электроны попадают на анод не позднее чем через половину периода циклоидального колебания. Поэтому условиям самовозбуждения отвечают лишь участки прямых, выделенные на рисунке 1.3, а
сплошными линиями и лежащие ниже параболы критического режима.
генерация колебаний типа бегущей волны невозможна: все электроны попадают на анод не позднее чем через половину периода циклоидального колебания. Поэтому условиям самовозбуждения отвечают лишь участки прямых, выделенные на рисунке 1.3, а
сплошными линиями и лежащие ниже параболы критического режима.
Рассмотренные графики самовозбуждения не могут претендовать на большую точность, а можно лишь установить, что для каждого вида колебаний существуют оптимальные соотношения между постоянным анодным напряжением и индукцией магнитного поля. Это не означает, однако, что генерирование колебаний невозможно в точках плоскости (f/a , В), не лежащих на указанных прямых. Если увеличивать анодное напряжение при неизменной индукции магнитного поля, то генерируемая мощность на данном виде колебаний должна переходить через максимум и уменьшаться при удалении от прямой, определяемой уравнением (1.4). При дальнейшем увеличении напряжения £/а могут быть достигнуты условия синхронизма с полем волны следующего вида, имеющего более низкий номер п .Естественно предположить, что существует промежуточная область неустойчивой генерации, где небольшие изменения анодного напряжения и постоянного анодного тока приводят к скачкообразному переходу с одного вида колебаний на другой.
Отвлекаясь от возбуждения колебаний на пространственных гармониках, отметим, что ![]() -вид колебаний требует для своего возбуждения наименьшего анодного напряжения. Это свойство
-вид колебаний требует для своего возбуждения наименьшего анодного напряжения. Это свойство ![]() -вида играет большую роль, особенно при работе магнетронов в импульсном режиме. Одновременно можно сделать вывод, что
-вида играет большую роль, особенно при работе магнетронов в импульсном режиме. Одновременно можно сделать вывод, что ![]() -вид отделен от других видов колебаний не только по частоте, но и по величине анодного напряжения.
-вид отделен от других видов колебаний не только по частоте, но и по величине анодного напряжения.
1.3 К.П.Д. магнетрона
Трудности, связанные с прямым вычислением отдаваемой электронами мощности, настолько велики, что в настоящее время не существует строгого расчета электронного к. п. д. магнетрона типа бегущей волны. В подобных случаях можно вычислить мощность, рассеиваемую электронами после взаимодействия с полем, и затем использовать закон сохранения энергии
Рассмотрим кинетическую энергию, которую имеет электрон в момент удара об анод после того, как значительная часть потенциальной энергии электрона отдана высокочастотному полю в пространстве взаимодействия.
При обсуждении процессов сортировки электронов было показано, что циклоидальная траектория благоприятного электрона при малой амплитуде высокочастотных колебаний наклоняется в сторону анода, но остается в основном такой же, как в статическом режиме. Радиус катящегося круга в плоском магнетроне равен
![]() , (1.5)
, (1.5)
где ![]() -
расстояние между катодом и анодом.
-
расстояние между катодом и анодом.
Скорость, которую имеет электрон при ударе об анод, зависит от момента удара. Будем исходить из наихудшего с точки зрения величины к. п. д. случая, когда удар происходит в верхней точке циклоидальной траектории. Полюсом вращения является точка касания круга к плоскости, по которой происходит качение этого круга. Радиус вращения электрона равен здесь ![]() .
Зная угловую скорость вращения круга
.
Зная угловую скорость вращения круга ![]() нетрудно получить максимальную скорость электрона:
нетрудно получить максимальную скорость электрона:
![]() . (1.6)
. (1.6)
К такому же результату можно придти, исходя из известной скорости центра круга, равной ![]() .
.
Максимальная кинетическая энергия, рассеиваемая электроном на аноде, равна
![]() (1.7)
(1.7)
Тот же электрон, находясь на катоде до начала движения в пространстве взаимодействия, обладал по отношению к аноду потенциальной энергией, равной Wn
= eUa
,
при нулевой кинетической энергии. Следовательно, энергия, отданная высокочастотному полю, по закону сохранения энергии равна Wn
—![]() .
.
К. п. д. рассматриваемого одиночного электрона, таким образом, имеет величину
![]() (1.8)
(1.8)
Полученное уравнение можно преобразовать, выразив величину ![]() через критические параметры
через критические параметры ![]() и
и ![]() .
.
 (1.9)
(1.9)
Уравнение (1.9) показывает связь электронного к.п.д. магнетрона с постоянным анодным напряжением и индукцией магнитного поля. При ![]() В = Вкр
электронный к.п.д. равен нулю, что вполне согласуется с делавшимися предположениями. Чем больше режим магнетрона отличается от критического, тем выше должен быть электронный к.п.д. Особенно интересно, что никакого теоретического предела повышения величины
В = Вкр
электронный к.п.д. равен нулю, что вполне согласуется с делавшимися предположениями. Чем больше режим магнетрона отличается от критического, тем выше должен быть электронный к.п.д. Особенно интересно, что никакого теоретического предела повышения величины ![]() эл
для магнетрона по рассматриваемым уравнениям не существует.
эл
для магнетрона по рассматриваемым уравнениям не существует.
Зависимость электронного к.п.д. магнетрона от величины магнитного поля В можно сделать особенно наглядной, если учесть условие синхронизма при работе на любом фиксированном виде колебаний. Воспользуемся упрощенным условием самовозбуждения магнетрона:
![]() (1.10)
(1.10)
Вводя это соотношение в (1.8) и полагая для цилиндрической системы ![]() имеем при
имеем при ![]()
![]() (1.11)
(1.11)
где ![]() - отношение радиуса катода к радиусу анода, равное
- отношение радиуса катода к радиусу анода, равное ![]() .
.
Подставим в (1.11) величины е
и m
, а также введем резонансную длину волны ![]() - говида колебаний
- говида колебаний ![]()
 .
.
Выражая индукцию магнитного поля в тесла и длину волны в сантиметрах, получаем:
![]() (1.12)
(1.12)
Для оценки получаемого к.п.д. рассмотрим в качестве примера 8-резонаторный магнетрон 10-см диапазона, работающий на ![]() -виде колебаний при магнитной индукции 0,18 тл
(1800 гс).
Величину
-виде колебаний при магнитной индукции 0,18 тл
(1800 гс).
Величину ![]() примем равной 1/3; такая или близкая к ней величина
примем равной 1/3; такая или близкая к ней величина ![]() типична для магнетронов при N
= 8. Вычисления по (1.12) дают:
типична для магнетронов при N
= 8. Вычисления по (1.12) дают: ![]() 70%.
70%.
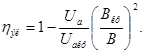
Расчетные значения электронного к.п.д. по (1.11) и (1.12) обычно несколько превышают получаемую на практике величину ![]() . Отчасти это и понятно, так как в рассмотренном расчете не были учтены потери энергии за счет неблагоприятных электронов, бомбардирующих катод, а также непроизводительные потери электронов на боковые крышки магнетрона и некоторые другие факторы. Величина электронного к.п.д. существующих магнетронов сантиметрового диапазона составляет 50—70%, а в некоторых случаях и более. Столь высокая эффективность магнетронов делает их ценнейшим мощным автогенератором диапазона СВЧ. Для данного магнетрона при неизменной длине волны уравнение (1.11) можно переписать в виде
. Отчасти это и понятно, так как в рассмотренном расчете не были учтены потери энергии за счет неблагоприятных электронов, бомбардирующих катод, а также непроизводительные потери электронов на боковые крышки магнетрона и некоторые другие факторы. Величина электронного к.п.д. существующих магнетронов сантиметрового диапазона составляет 50—70%, а в некоторых случаях и более. Столь высокая эффективность магнетронов делает их ценнейшим мощным автогенератором диапазона СВЧ. Для данного магнетрона при неизменной длине волны уравнение (1.11) можно переписать в виде
![]() (1.13)
(1.13)
Полученное уравнение соответствует случаю, когда к.п.д. отсчитывается при движении вдоль одной из прямых самовозбуждения на плоскости (
Ua
, В)
(см. рис. 1.3, а). Соответствующее графическое изображение зависимости ![]() эл
= f
(
B
)
для 8-резонаторного магнетрона показано на рисунке1.4, а. Кривые электронного к.п.д. имеют вид отрезков гипербол. Чем ниже номер вида п,
тем меньше электронный к.п.д. при одной и той же величине магнитной индукции В.
Иначе говоря, для достижения одного и того же электронного к.п.д. наименьшее магнитное поле требуется при
эл
= f
(
B
)
для 8-резонаторного магнетрона показано на рисунке1.4, а. Кривые электронного к.п.д. имеют вид отрезков гипербол. Чем ниже номер вида п,
тем меньше электронный к.п.д. при одной и той же величине магнитной индукции В.
Иначе говоря, для достижения одного и того же электронного к.п.д. наименьшее магнитное поле требуется при ![]() -виде колебаний.
-виде колебаний.

Рисунок 1.4 - Зависимость электронного к.п.д магнетрона от индукции магнитного поля при ![]() const
const
Рост электронного к. п. д. магнетрона при увеличении магнитной индукции В
и, напомним, при соответствующем повышении постоянного анодного напряжения ![]() а
легко понять с физической точки зрения, так как при этом происходит неограниченное уменьшение радиуса катящегося круга и уменьшение энергии, рассеиваемой электронами на аноде. Такие же тенденции характерны для работы других приборов магнетронного типа. В этом отношении проявляются очевидные отличия и преимущества приборов М-типа в сравнении с приборами О-типа. В приборах М-типа электроны отдают СВЧ полю не кинетическую, а потенциальную
энергию, полученную от источника постоянного напряжения. Средняя скорость переносного движения электронов не изменяется, благодаря чему не нарушаются условия синхронизма с полем бегущей волны.
а
легко понять с физической точки зрения, так как при этом происходит неограниченное уменьшение радиуса катящегося круга и уменьшение энергии, рассеиваемой электронами на аноде. Такие же тенденции характерны для работы других приборов магнетронного типа. В этом отношении проявляются очевидные отличия и преимущества приборов М-типа в сравнении с приборами О-типа. В приборах М-типа электроны отдают СВЧ полю не кинетическую, а потенциальную
энергию, полученную от источника постоянного напряжения. Средняя скорость переносного движения электронов не изменяется, благодаря чему не нарушаются условия синхронизма с полем бегущей волны.
Опыт в основном подтверждает ход зависимости ![]() эл
= f
(
B
)
при
эл
= f
(
B
)
при ![]() , представленной на рисунке 1.4, а.
Однако в случае разнорезонаторных магнетронов в некотором интервале значений магнитной индукции наблюдается "провал" электронного к. п. д., как показано качественно на рисунке 1.4, б.
Исследования показали, что в центре "провала" произведение магнитной индукции, выраженной в тесла, на длину волны в сантиметрах имеет для всех магнетронов одинаковую величину, равную приблизительно 1,2 тл.см.
, представленной на рисунке 1.4, а.
Однако в случае разнорезонаторных магнетронов в некотором интервале значений магнитной индукции наблюдается "провал" электронного к. п. д., как показано качественно на рисунке 1.4, б.
Исследования показали, что в центре "провала" произведение магнитной индукции, выраженной в тесла, на длину волны в сантиметрах имеет для всех магнетронов одинаковую величину, равную приблизительно 1,2 тл.см.
"Провал" электронного к. п. д. в разнорезонаторных магнетронах можно качественно объяснить с точки зрения циклотронного резонанса,
возникающего при условии ![]() . В пространстве взаимодействия разнорезонаторного магнетрона, кроме поля
. В пространстве взаимодействия разнорезонаторного магнетрона, кроме поля ![]() -вида, имеется составляющая поля п
= 0. При приблизительном совпадении частоты генерируемых колебаний и циклотронной частоты характер движения электронов может измениться. Большую роль играет тот факт, что поле нулевой составляющей значительно медленнее убывает при удалении от анода, чем поле
-вида, имеется составляющая поля п
= 0. При приблизительном совпадении частоты генерируемых колебаний и циклотронной частоты характер движения электронов может измениться. Большую роль играет тот факт, что поле нулевой составляющей значительно медленнее убывает при удалении от анода, чем поле ![]() -вида .
-вида .
Форма спиц и их взаимодействие с полем ![]() -вида ухудшаются.
-вида ухудшаются.
Обычно разнорезонаторные магнетроны эксплуатируются при более низком магнитном поле, чем поле, соответствующее центру "провала". Перейти в область больших индукций за "провалом" практически не удается из-за трудностей получения очень сильных магнитных полей.
Некоторое влияние на величину электронного к. п. д. магнетрона оказывает разделение видов колебаний. По-видимому, условия формирования спиц ухудшаются при наличии "загрязняющих" полей в пространстве взаимодействия. Электронный к. п. д. магнетрона может снизиться также за счет влияния поля связок около концов анодного блока. Это поле, не имеющее азимутальных вариаций, оказывает примерно такое же воздействие на пространственный заряд в магнетроне, какое имеет поле нулевой составляющей в магнетронах разнорезонаторной конструкции. Для устранения подобных эффектов связки обычно экранируются путем расположения их в кольцевых канавках, выточенных на торцах анодного блока.
Диаметр катода также влияет на величину электронного к. п. д. Для повышения величины ![]() желательно уменьшать отношение
желательно уменьшать отношение ![]() .
Однако при малом
.
Однако при малом ![]() - не могутполностью удовлетворяться условия синхронизма между электронами и полем, так как напряженность постоянного электрического поля имеет наибольшую величину у катода и уменьшается по направлению к аноду. Чтобы повысить электронный к. п. д. магнетрона, обычно рекомендуется выбирать наименьшую возможную величину
- не могутполностью удовлетворяться условия синхронизма между электронами и полем, так как напряженность постоянного электрического поля имеет наибольшую величину у катода и уменьшается по направлению к аноду. Чтобы повысить электронный к. п. д. магнетрона, обычно рекомендуется выбирать наименьшую возможную величину![]() , при которой получается достаточная устойчивость видов колебаний.
, при которой получается достаточная устойчивость видов колебаний.
Для оценки оптимального отношения с предложены различные эмпирические соотношения, например:
![]()
![]() (1.14)
(1.14)
где N — число резонаторов. Отметим, однако, что зависимость ![]() эл = f
(
эл = f
(![]() )
не очень критична и допускает заметные отклонения от величины, рассчитанной по уравнениям (1.14).
)
не очень критична и допускает заметные отклонения от величины, рассчитанной по уравнениям (1.14).
В заключение напомним, что полный к. п. д. магнетрона определяется с учетом к. п. д. резонаторной системы:
![]() (1.15)
(1.15)
Как известно, величина ![]() в общем случае связана с собственной, нагруженной и внешней добротностями колебательной системы соотношением
в общем случае связана с собственной, нагруженной и внешней добротностями колебательной системы соотношением
![]()
![]() (1.16)
(1.16)
Величина внешней добротности выбирается с учетом допустимого затягивания частоты магнетрона и обычно не бывает ниже 100—200. Собственную добротность ![]() желательно иметь как можно выше. Типичная величина
желательно иметь как можно выше. Типичная величина ![]() в сантиметровом диапазоне имеет порядок 1000. Таким образом, по (1.16) к. п. д. резонаторной системы может составлять от 90—95% до 60—65% на наиболее коротких волнах. Типичные значения полного к. п. д. магнетронов составляют от 60—70% на дециметровых волнах до 20—30% на волнах длиной порядка 1 см
.
в сантиметровом диапазоне имеет порядок 1000. Таким образом, по (1.16) к. п. д. резонаторной системы может составлять от 90—95% до 60—65% на наиболее коротких волнах. Типичные значения полного к. п. д. магнетронов составляют от 60—70% на дециметровых волнах до 20—30% на волнах длиной порядка 1 см
.
1.4 Рабочие и нагрузочные характеристики магнетронов
При рассмотрении эксплуатационных свойств магнетронов используют две группы характеристик. К первой относятся вольтамперные характеристики, снятые при неизменной нагрузке, соответствующей режиму согласования выходного устройства магнетрона. Параметрами при снятии характеристик ![]() являются магнитная индукция В, генерируемая мощность Рген
, частота генерируемых колебаний
являются магнитная индукция В, генерируемая мощность Рген
, частота генерируемых колебаний ![]() и полный к. п. д. (
и полный к. п. д. (![]() ). Ко второй группе относятся зависимости генерируемой мощности и частоты от полного сопротивления (полной проводимости) нагрузки.
). Ко второй группе относятся зависимости генерируемой мощности и частоты от полного сопротивления (полной проводимости) нагрузки.
Вольтамперные характеристики магнетрона, снятые при условиях В
= const, Рген
= const, ![]() = const или
= const или ![]() = const, носят название рабочих характеристик.
Эти характеристики принято строить в прямоугольной системе координат, по вертикальной оси которой откладывается постоянное анодное напряжение, а по горизонтальной оси — постоянный анодный ток магнетрона.
= const, носят название рабочих характеристик.
Эти характеристики принято строить в прямоугольной системе координат, по вертикальной оси которой откладывается постоянное анодное напряжение, а по горизонтальной оси — постоянный анодный ток магнетрона.
Нагрузочные характеристики ![]() и
и ![]() при
при ![]() , как и для других типов автогенераторов СВЧ, удобно строить на комплексной плоскости полного сопротивления нагрузки в полярной системе координат.
, как и для других типов автогенераторов СВЧ, удобно строить на комплексной плоскости полного сопротивления нагрузки в полярной системе координат.
Расчета нагрузочных и рабочих характеристик магнетронов обычно не производят. Тем не менее, форма этих характеристик непосредственно обусловливается физическими процессами, происходящими в магнетроне, и может быть качественно получена из простых соображений.
Рассмотрим идеализированные рабочие характеристики, которые можно предположить, если исходить из описанных свойств магнетронов типа бегущей волны.
Семейство кривых постоянной генерируемой мощности Рген
= const можно получить из следующих соображений. Генерируемая мощность магнетрона, как и всякого электронного прибора, связана с постоянным анодным напряжением, постоянным анодным током и к. п. д. соотношением ![]() . Его можно переписать в виде
. Его можно переписать в виде
![]() .
.
Отсюда следует, что если бы к. п. д. магнетрона оставался неизменным и не зависел от ![]() , то при Рген
= constвольтамперные-характеристики
, то при Рген
= constвольтамперные-характеристики ![]() имели бы вид равнобочных гипербол. Однако с ростом
имели бы вид равнобочных гипербол. Однако с ростом ![]() электронный к. п. д. несколько уменьшается, так как при этом повышается амплитуда СВЧ колебаний и увеличивается доля мощности, рассеиваемой на аноде в конце последнего витка циклоидальной траектории. Поскольку к. п. д. резонаторной системы, естественно, остается неизменным, то с увеличением тока
электронный к. п. д. несколько уменьшается, так как при этом повышается амплитуда СВЧ колебаний и увеличивается доля мощности, рассеиваемой на аноде в конце последнего витка циклоидальной траектории. Поскольку к. п. д. резонаторной системы, естественно, остается неизменным, то с увеличением тока ![]() линии постоянной мощности отклоняются от гипербол и несколько поднимаются, как показано качественно на рис. 1.5.
линии постоянной мощности отклоняются от гипербол и несколько поднимаются, как показано качественно на рис. 1.5.
Чем больше генерируемая мощность, тем выше и правее должны располагаться кривые Рген = const.
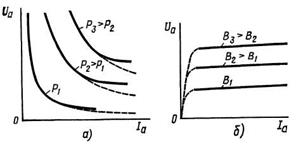
Рисунок 1.5 - Идеализированные рабочие характеристики магнетронного генератора
Таким образом, вольтамперные характеристики магнетрона при В = const имеют вид семейства кривых с круто возрастающим начальным участком, показанным пунктиром на рис. 1.5, б. Далее следуют излом и почти горизонтальный участок, имеющий небольшой наклон к оси абсцисс и характеризующий работу магнетрона в генераторном режиме.
Типичные рабочие характеристики импульсного магнетрона 10-см диапазона приведены на рис. 1.6. Кроме кривых Рген = const и В = const, на этом графике показаны семейства кривых постоянного к. п. д. и постоянной генерируемой частоты. Рабочая точка магнетрона лежит в верхнем правом углу рассматриваемого графика.
Из рисунка 1.6 видно, что опытные кривые хорошо согласуются с обсуждавшимися ранее идеализированными характеристиками. Такое совпадение может рассматриваться как подтверждение правильности сделанных основных качественных предположений о механизме работы магнетрона.
По своему характеру нагрузочные характеристики магнетронов сходны с нагрузочными характеристиками других автогенераторов СВЧ с резонансной колебательной системой, например, отражательных клистронов. Такое сходство обусловлено тем, что затягивание частоты под действием внешней нагрузки обычно значительно меньше разделения видов.
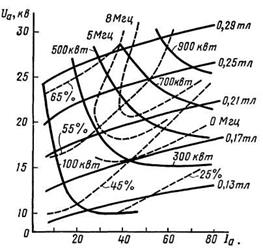
Рисунок 1.6 - Типичные рабочие характеристики импульсного магнетрона 10-см диапазона
В качестве фиксированных параметров при определении нагрузочных характеристик магнетрона выбираются номинальные значения магнитной индукции В
и постоянного анодного тока ![]() . Иногда (при особенно высокой мощности) во избежание пробоев при больших значениях коэффициента стоячей волны снятие нагрузочных характеристик производится при пониженной мощности. В качестве начала отсчета фазы стоячей волны обычно выбирается выходной фланец магнетрона.
. Иногда (при особенно высокой мощности) во избежание пробоев при больших значениях коэффициента стоячей волны снятие нагрузочных характеристик производится при пониженной мощности. В качестве начала отсчета фазы стоячей волны обычно выбирается выходной фланец магнетрона.
Типичная нагрузочная характеристика импульсного магнетрона 3-см диапазона приведена на рисунке 1.7. Линии постоянной генерируемой мощности близки к окружностям постоянной активной проводимости нагрузки. Линии постоянной частоты имеют веерообразное расположение и близки к линиям постоянной реактивной проводимости на круговой диаграмме полных проводимостей в полярной системе координат.
Важным параметром магнетронов является степень затягивания частоты, определяемая при коэффициенте стоячей волны, равном 1,5(см. рис. 1.7).
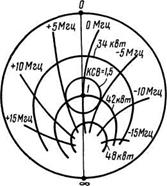
Рисунок 1.7 - Пример реальной нагрузочной характеристики импульсного магнетрона 3-см диапазона
Этот параметр, встречающийся при рассмотрении любого автогенератора СВЧ, приобретает в случае магнетронов особую актуальность, так как магнетроны часто связываются с нагрузкой без развязывающих ослабителей. Обычно степень затягивания F 3 для магнетронов 10-см диапазона составляет 10—15 Мгц; в 3-см диапазоне степень затягивания может доходить до 15—20 Мгц. Допустимая степень затягивания находится в тесной связи с возможностями схемы автоматической подстройки частоты, использующейэлектронную настройку гетеродина — отражательного клистрона.
Основываясь на общих уравнениях затягивания частоты, можно найти соответствующие значения внешней добротности магнетрона на рабочем виде колебаний.
![]() (1.17)
(1.17)
Через v
0
здесь обозначена генерируемая частота при согласованной нагрузке, примерно равная резонансной частоте "холодного" блока на рабочем виде колебаний. Обычно учитывается также, что линии Рген
= const и ![]() = const на рис. 1.7 пересекаются под углом, отличным от
= const на рис. 1.7 пересекаются под углом, отличным от ![]() . В этом случае в правой части уравнения (1.17) вводится дополнительный эмпирический множитель, равный приблизительно 1,05.
. В этом случае в правой части уравнения (1.17) вводится дополнительный эмпирический множитель, равный приблизительно 1,05.
Вычислим для примера требующуюся внешнюю добротность магнетрона, предназначенного для работы на волне 3,2 см.
Задаваясь допустимой степенью затягивания, равной 20 Мгц,
получаем по (1.17) : ![]() . Именно такие и несколько более высокие значения
. Именно такие и несколько более высокие значения ![]() типичны для современных магнетронов.
типичны для современных магнетронов.
1.5 Конструирования магнетронов
Основными конструктивными узлами современных магнетронов являются:
1)анодный блок (корпус) магнетрона, включающий резонаторную систему и устройства для разделения видов колебаний;
2)система перестройки частоты;
3)вывод энергии;
4)катод с соответствующими выводами;
5)вакуумная оболочка и система охлаждения;
6)магнитная цепь.
В большинстве магнетронов вся резонаторная система, механизм перестройки и значительная часть вывода энергии находятся внутри вакуумной оболочки и являются неотъемлемыми частями магнетрона. Это оказывает большое влияние на конструктивное оформление каждого из указанных узлов магнетрона.
Большинство современных магнетронов, за исключением некоторых магнетронов миллиметрового диапазона, используют p-вид колебаний резонаторной системы. Данный вид колебаний обладает рядом особенностей и преимуществ в сравнении с другими видами колебаний. К числу таких преимуществ относятся отсутствие вырождения, наименьшее анодное напряжение при одной и той же индукции магнитного поля (если отвлечься от возбуждения на пространственных гармониках других видов колебаний), а также наибольший к. п. д. при неизменной величине магнитной индукции. Достоинством p-вида является также конструктивная простота требующихся для этого резонансных систем.
При выборе количества резонаторов N необходимо учитывать следующее. Прежде всего, число N должно быть четным, чтобы обеспечить существование p-вида колебаний. Увеличение числа резонаторов приводит к ухудшению разделения видов колебаний, но одновременно способствует снижению анодного напряжения при заданной индукции В и при неизменном диаметре анода. Обычные магнетроны 10-см диапазона имеют 8—12 резонаторов; в 3-см диапазоне применяются от 12 до 18 резонаторов. При переходе к миллиметровому диапазону число N доходит до 24—38 и более. Несколько особняком стоят коаксиальные магнетроны (см. далее), допускающие использование значительно большего числа резонаторов.
На волнах длиннее 3 см основное применение находят резонаторы типа щель—отверстие и лопаточные (секторные) резонаторы, показанные на рисунке 1.8. В миллиметровом диапазоне волн часто применяются щелевые резонаторы (рис. 1.8, в).
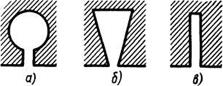
Рисунок 1.8 - Наиболее распространенные типы магнетронных резонаторов
Опыт показывает, что при использовании связок максимальные значения диаметра анодного отверстия da
и рабочей длины анода ![]() . связаны с длиной волны ориентировочными соотношениями
. связаны с длиной волны ориентировочными соотношениями
![]()
В случае разнорезонаторной системы максимальные величины ![]() и
и ![]() могут быть заметно повышены:
могут быть заметно повышены:
![]()
В миллиметровом диапазоне волн и при ![]() идут на увеличение
идут на увеличение ![]() до 1,5 и даже до 2,0. Чтобы избежать при этом резкого увеличения числа резонаторов или повышения анодного напряжения и магнитной индукции, целесообразно использовать работу магнетрона на виде колебаний, отличном от p, при синхронизме с пространственной гармоникой р =
+1 или р
= —1.
до 1,5 и даже до 2,0. Чтобы избежать при этом резкого увеличения числа резонаторов или повышения анодного напряжения и магнитной индукции, целесообразно использовать работу магнетрона на виде колебаний, отличном от p, при синхронизме с пространственной гармоникой р =
+1 или р
= —1.
Равнорезонаторные блоки с "многоэтажными" связками, расположенными через равные интервалы по длине анода, могут иметь очень большую длину (до ![]() ),
что позволяет значительно увеличить длину катода и резко повысить генерируемую мощность.
),
что позволяет значительно увеличить длину катода и резко повысить генерируемую мощность.
Механическая перестройка (настройка) частоты основывается на изменении резонансной частоты p-вида колебаний анодного блока. Существование нескольких близко расположенных по частоте видов колебаний осложняет механическую настройку магнетронов. Важными условиями при любом способе перестройки являются сохранение достаточного разделения видов и приблизительное постоянство собственной и нагруженной добротностей анодного блока в пределах рабочего диапазона частот. Всякие паразитные резонансы, кроме основного резонанса p-вида, являются недопустимыми.
Наиболее распространен вариант симметричной механической перестройки. Одновременное воздействие на резонаторы производится индуктивным или емкостным способом с помощью металлических колец, стержней и коронок, перемещающихся внутри резонаторов или в торцевых пространствах магнетрона. Несколько систем, обеспечивающих диапазон перестройки до ± (3¸6) % от средней частоты, показаны схематически на рис. 1.9. При настройке индуктивным кольцом (рис. 1.9, а) основное воздействие производится на высокочастотное магнитное поле, проходящее через торцевое пространство. С приближением металлического кольца к торцу анодного блока уменьшается эквивалентная индуктивность всех резонаторов и, как следствие, повышается резонансная частота каждого резонатора и всего анодного блока в целом. Воздействие на высокочастотное магнитное поле в самих резонаторах производится с помощью индуктивной коронки, имеющей металлические стержни, как показано на рис. 1.9, б. Похожим образом производится емкостная настройка магнетрона, при которой металлическое кольцо или коронка (см. рис. 1.9, в , г) перемещается в торцевом пространстве вблизи той части сегментов, где имеется наиболее сильное электрическое поле, или около связок. Для расширения диапазона иногда используют комбинацию емкостной и индуктивной перестроек.
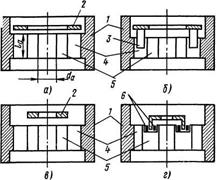
Рисунок. 1.9 - Симметричная механическая настройка магнетрона индуктивным кольцом и индуктивной коронкой (а, б) и емкостнымикольцом и коронкой (в, г) :1- анодный блок; 2- металлическое кольцо; 3- металлический стержень; 4 -отверстие резонатора; 5 - щель резонатора; 6 – связки.
Интересна разновидность магнетронных систем, использующая коаксиальный резонатор, который охватывает многорезонаторный анодный блок. Внутренним проводником этого резонатора является цилиндрическая поверхность собственно анодного блока. В этой поверхности прорезаны продольные щели, связывающие коаксиальный резонатор с магнетронными резонаторами через один, как показано на рис. 1.10. Коаксиальный резонатор возбуждается на виде колебаний Н011 , отличающемся тем, что электрическое поле и токи в стенках имеют вид замкнутых окружностей. Подобной структуре поля и токов отвечает возбуждение анодного блока магнетрона на p-виде, так как в резонаторах, расположенных через один и имеющих щелевую связь, колебания оказываются синфазными (сдвинутыми между собой по фазе на 2p). Видам колебаний анодной системы, отличным от p-вида, соответствуют виды колебаний в коаксиальном резонаторе, отличные от Н011 . Эти колебания могут быть в свою очередь сильно подавлены, например с помощью поглощающих вставок и кольцевых щелей, нарушающих высокочастотные токи всех видов колебаний, кроме вида Н011 .
Благодаря этому диаметр анода и число резонаторов в магнетроне с описанным коаксиальным резонатором ("коаксиальном магнетроне") могут быть значительно увеличены в сравнении с обычными магнетронами без ухудшения разделения основных видов колебаний. Увеличение диаметра анода позволяет значительно повысить генерируемую мощность магнетрона.
Коаксиальные магнетроны имеют и другие существенные преимущества. Накопление значительной энергии в коаксиальном высокодобротном резонаторе повышает собственную добротность Qo всей системы и стабильность частоты генерируемых колебаний. Степень затягивания частоты F 3 может быть при этом значительно снижена за счет уменьшения связи с нагрузкой и повышения внешней добротности Q0 при одновременном улучшении к. п. д. резонаторной системы.
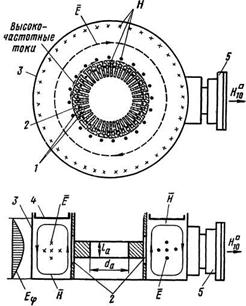
Рисунок 1.10 - Схема устройства коаксиального магнетрона: 1 -магнетронные резонаторы, 2—щели связи, 3—наружная стенка коаксиального резонатора; 4 — поршень механической настройки; 5—вывод энергии (прямоугольный волновод)
Далее, благодаря улучшению разделения видов колебаний возможна работа при меньшей амплитуде высокочастотного напряжения в пространстве взаимодействия, что приводит к повышению электронного к. п. д. Существуют и другие достоинства магнетронов коаксиального типа, что позволяет отнести их к числу перспективных направлений развития магнетронных генераторов.
Устройство типичных коаксиальных и волноводных выводов энергии показано на рис. 1.11 и 1.12. Петля вводится обычно в один из резонаторов в области максимума СВЧ магнитного поля. Основная трансформация сопротивления, определяющая величину QBH , осуществляется в зависимости от размеров петли.
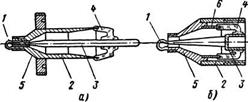
Рисунок 1.11 - Коаксиальные выводы энергии магнетронов малой и средней мощности 10-см диапазона: 1—петля, 2, 3 — наружный и внутренний проводники коаксиальной линии; 4 — стекло; 5—медь; 6— ковар
Коаксиально-волноводные выводы энергии, жестко скрепляемые с магнетронами, применяются при умеренной мощности в коротковолновой части сантиметрового диапазона. При более высоких мощностях, а также при более коротких волнах используют в основном волноводные выводы. Между стандартным прямоугольным волноводом и анодным блоком обычно включается четвертьволновый волноводный трансформатор (рис. 1.12), понижающий сопротивление нагрузки в 100—200 раз. В качестве трансформаторов используются также многоступенчатые четвертьволновые и экспоненциальные переходы.
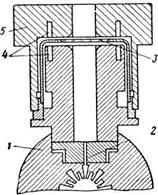
Рисунок 1.12 - Волноводный вывод энергии магнетрона 3-см диапазона с одноступенчатым четвертьволновым трансформатором: 1—анодный блок, 2 — трансформатор, 3—круглое стеклянное или керамическое окно; 4 — дроссель; 5—выходной фланец
Катод играет значительно большую роль в работе магнетронов, чем в работе большинства других электронных приборов СВЧ. Длина и диаметр катода необращенного магнетрона имеют пределы ввиду ограничений, накладываемых на высоту анодного блока l
а
, диаметр анода d
э
и отношение ![]() . Требования к удельной эмиссии становятся особенно высокими. Если в 10-смдиапазоне типичная величина эмиссии с катода магнетрона в импульсе составляет 10 a/см2
,
то в 3-смдиапазоне требуемая плотность тока доходит примерно до 30 а/см2
.
С дальнейшим укорочением волны происходит соответствующий рост требуемой эмиссии. К катоду магнетрона предъявляется дополнительное требование — способность работать с достаточным сроком службы в условиях значительной обратной бомбардировки. Значительную роль в работе магнетрона играет вторичная электронная эмиссия с катода. В связи с этим к материалу катода предъявляется также требование высокой вторичной эмиссии.
. Требования к удельной эмиссии становятся особенно высокими. Если в 10-смдиапазоне типичная величина эмиссии с катода магнетрона в импульсе составляет 10 a/см2
,
то в 3-смдиапазоне требуемая плотность тока доходит примерно до 30 а/см2
.
С дальнейшим укорочением волны происходит соответствующий рост требуемой эмиссии. К катоду магнетрона предъявляется дополнительное требование — способность работать с достаточным сроком службы в условиях значительной обратной бомбардировки. Значительную роль в работе магнетрона играет вторичная электронная эмиссия с катода. В связи с этим к материалу катода предъявляется также требование высокой вторичной эмиссии.
Основное назначение современных импульсных магнетронных генераторов — передатчики радиолокационных станций и других радиотехнических устройств, в том числе линий импульсной связи, радиоотелеметрических систем, маяков и т. п.
Устройство двух типичных импульсных магнетронов приведено на рис. 1.13 и 1.14.
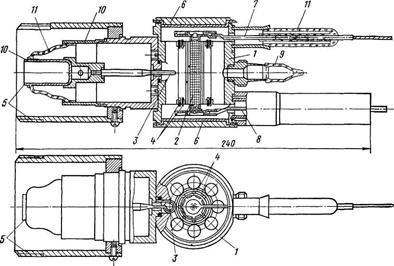
Рисунок 1.13 - Устройство типичного импульсного ненастраиваемого магнетрона 10-смдиапазона: 1 — анодный блок, 2 — катод, 3 — петля вывода энергии, 4— двойные кольцевые связки, 5—коаксиальный вывод энергии, 6—боковые крышки; 7—вывод катода и накала 8—-вывод накала 9—трубка для откачки; 10 —ковар; 11—стекло
Магнетроны находят также применение в качестве мощных генераторов, питающих линейные электронные ускорители. Магнетроны непрерывного режима все более широко применяются в установках промышленного и бытового СВЧ нагрева.
Диапазон мощностей импульсных магнетронов составляет от десятков ватт до 10 Мвт. Магнетроны непрерывного режима выпускаются на мощности от долей ватта до нескольких десятков киловатт.
Устройство митрона и схема его включения представлены на рис. 1.15. В этом приборе катод вынесен из пространства взаимодействия и расположен вдоль оси на одном из торцов

Рисунок 1.14 - Устройство типичного импульсного магнетрона 3-см диапазона (без постоянных магнитов). В более крупном масштабе изображено устройство катода, связок и анодного блока: 1- анодный блок с радиатором, 2-полюсный наконечник; 5 - катодная ножка, 4- катод; 5 - окно вывода энергии; 6-связки; 7-Н-образный четвертьволновый трансформатор; 8- пермендгоровые наконечники
Катод окружен коническим дополнительным анодом — управляющим электродом, образующим вместе с катодом магнетронную пушку типа Кайно—Тейлора. Вместо катода внутри резонаторной системы расположен цилиндрический неэмиттирующий отрицательный электрод ("холодный катод"), создающий в пространстве взаимодействия постоянное радиальное электрическое поле, как в обычном магнетроне.
Электронный поток, имеющий вид полой трубки, инжектируется в пространство взаимодействия митрона и взаимодействует с полем p-вида колебаний. При U а1 = const (см. рис. 1.15) постоянное анодное напряжение U а практически не влияет на величину анодного тока, что позволяет использовать в "чистом виде" явление электронной настройки магнетронов. Для реализации широкого диапазона электронной настройки нагруженная добротность резонаторной системы снижается до 2—10. В митроне, изображенном на рис. 1.15, использована встречно-штыревая система, соединяемая двумя металлическими кольцами с внешним низкодобротным резонатором. С помощью митронов получают диапазон электронной настройки, доходящий до одной октавы при малой генерируемой мощности.
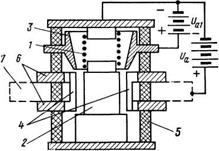
Рисунок 1.15 - Устройство магнетрона, настраиваемого напряжением: 1 — накаленный катод; 2 — отрицательный электрод; 3—конический управляющий электрод; 4— анодные ламели (система встречных штырей); 5—керамика; 6 — анодные кольца для включения внешней части резонатора; 7 — наружный резонатор
Таким образом, митроны могут успешно конкурировать с лампами обратной волны типа О. Дополнительным преимуществом магнетронов, настраиваемых напряжением, является высокий к. п. д.
Вывод На основе анализа рассмотренных магнетронов можно в приемопередатчиках необходимо использовать импульсные магнетроны.
2 ТЕХНИЧЕСКАЯ ЧАСТЬ
2.1 Назначение и состав радиоаппаратуры для экспериментальных исследований
Радиолокатор "Гроза" обеспечивает радиолокационный обзор земной поверхности, обнаружение опасных для самолёта гидрометеообразований (грозы, мощнокучевая облачность и т. д.), измерение угла сноса самолёта и коррекцию бортового навигационного вычислителя. В состав радиолокатора входят следующие основные блоки:
- антенный блок, служащий для излучения в просматриваемое пространство импульсных СВЧ-колебаний З-сантиметрового диапазона волн и приёма отражённых сигналов;
- приёмно-передающий блок, осуществляющий генерацию мощных СВЧ- импульсов и усиление принятых отражённых сигналов;
- основной индикаторный блок с пультом, осуществляющий синхронизацию работы РЛС, формирование радиально-секторной развёртки "азимут- дальность" для индикатора, усиление видеосигналов и их индикацию, а также управление всей работой радиолокатора;
- блок стабилизации и управления, служащий для стабилизации зоны обзора РЛС в пространстве при кренах и тангаже самолёта;
- при наличии штурмана на борту самолёта - второй (дополнительный) индикатор штурмана;
- при установке навигационного вычислителя на борту – блок коррекции, служащий для коррекции счисленных текущих координат по характерным радиолокационным ориентирам;
- на самолётах, где необходима особо высокая надёжность, второй (дублирующий) приёмно-передающий блок, явяющийся горячим резервом первого блока и в случае выхода его из строя полностью выполняющий все его функции.
РЛС "Гроза" присваивается цифровое обозначение, совпадающее с принятым самолётостроительным предприятием номером типа самолета, например, "Гроза-40" - радиолокатор для самолета ЯК-40; "Гроза-24" - радиолокатор для самолёта АН-24.
2.2 Состав и размещение радиолокатора "Гроза"
В состав РЛС входят следующие блоки:
- антенный блок c рефлектором диаметром 560 мм;
- приёмно-передающий блок с повышенной разрешающей способностью;
- индикаторный блок с пультом управления радиолокатора;
- волноводный тракт.
Все блоки, за исключением антенного, размещаются в герметической кабине самолёта. Антенный блок и часть волноводного тракта находятся в негерметическом носовом радиопрозрачном обтекателе.
Индикаторный блок РЛС располагается в средней части приборной доски между рабочими местами первого и второго пилотов.
2.3 Основные технические характеристики радиолокатора "Гроза"
Основные технические характеристики РЛС "Гроза" следующие:
- средняя дальность наблюдения изображения незастроенных участков суши и крупных водных ориентиров при развёртке длительностью 250 км составляет 100 км;
- средняя дальность наблюдения изображений областных городов и промышленных центров - 155 км;
- средняя дальность наблюдения изображений особо крупных промышленных центров - 230 км;
- дальность обнаружения грозовой и кучево-дождевой облачности среднего развития - 130 км,
- диапазон высот полёта, в котором обеспечивается наилучшая равноконтрастность радиолокационного изображения земной поверхности - 5000- 9000 м;
- максимальная ошибка измерения радиолокатором угла сноса самолета - не более 1,5°;
- возможные углы ручного наклона оси диаграммы направленности антенны относительно плоскости горизонта ±10°;
- сектор азимутального обзора РЛС ±100° от строительной оси самолёта;
- частота азимутального обзора - 0,55 - 0,9 Гц (32-54 циклов обзора в минуту);
- импульсная мощность излучаемых радиоимпульсов - не менее 9 кВт;
- частота излучаемых СВЧ колебаний - 9370 ± 30 МГц;
- средняя мощность генерируемых СВЧ колебаний - не менее 8 ВТ;
- полоса пропускания сквозной частотной характеристики приемника на уровне половинной мощности - в пределах
![]() .
.
где f 1 - низшая граничная частота; f 2 - высшая граничная частота;
- соотношение между граничными частотами полосы и частотой магнетрона fМ удовлетворяет условию
![]() ;
;
- длительность излучаемых радиоимпульсов – 2 ± 0,2 мкс;
- частота повторения излучаемых радиоимпульсов равна частоте бортовой электросети 200/115В, т.е. 400 Гц;
- чувствительность приёмного устройства РЛС по пропаданию сигнала в шумах - не менее 100 дБ/мВ;
- ширина диаграммы направленности по уровню половинной мощности в горизонтальной плоскости - не более 4,2°;
- длительность развёртки на индикаторе: 30 км; 50 км, 125 км, 250 км – все, начиная с нуля дальности, и 375 ± 25 км, начиная с дальности 200 км;
- интервал между калибрационными метками дальности: 10 км на развертках "30" и "50", 25 км – на развёртке "125" и 60 км - на развёртках "250" и "375";
- напряжение электропитания РЛС:
однофазное переменное напряжение 115 В с частотой 400 Гц или трёхфазное переменное напряжение с линейным значением 200 В и частотой 400 Гц; трехфазное напряжение 36 В с частотой 400 Гц; постоянное напряжение 27 В.
2.4 Режимы работы радиолокатора "Гроза"
В соответствии с тактическим назначением РЛС "Гроза" может эксплуатироваться в следующих режимах: "Земля", "Метео", "Контур", "Снос", "Коррекция".
Режим работы "Земля"
Изображение местности на экране индикатора в режиме "Земля" получается в результате различных значений эффективной отражающей поверхности наземных объектов, что приводит к различию амплитуд отражённых сигналов, поступающих на вход приёмника РЛС.
В свою очередь различие амплитуд сигналов вызывает различную яркость свечения отдельных элементов экрана, что позволяет судить о характере облучаемых объектов (рис. 2.1).
Для получения изображения местности антенна РЛС в режиме "Земля" имеет веерный луч - широкий в вертикальной плоскости и узкий (4°,2) в горизонтальной плоскости.
При работе РЛС в режиме "Земля" обеспечивается получение на индикаторе в полярных координатах "азимут-дальность" непрерывной радиолокационной карты земной поверхности в пределах азимутальных углов ±100° впереди самолёта. Экран индикатора имеет время послесвечения несколько большее времени цикла качания антенны РЛС, что и позволяет наблюдать летчику общую картину просматриваемой местности. В нижней части рис.2.1 приведён участок такого изображения (условно - в негативе). Выше приведены временные диаграммы с характером изменения напряжения UВУ - на выходе видеоусилителя и форма тока в отклоняющей катушке, обеспечивающая развёртку электронного луча по дальности.
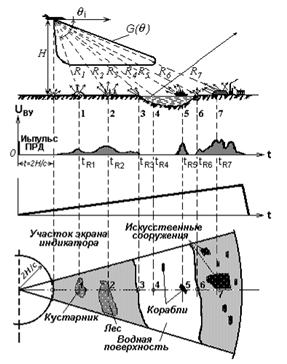
Рисунок 2.1 – Принцип получения радиолокационного изображения на индикаторе кругового обзора
Первые отражённые сигналы приходят с дальности, равной высоте полёта, поэтому около центра экрана образуется тёмное пятно с радиусом, пропорциональным высоте полёта самолёта. Затем экран засвечивается сигналом, отражённым от различных объектов. От спокойной водной поверхности происходит зеркальное отражение и участок экрана, ей соответствующий, остаётся незасвеченным (тёмным). В связи с этим на тёмном фоне хорошо видны отражения кораблей, мостов и других надводных объектов. Искусственные сооружения создают достаточно интенсивные отражённые сигналы и их изображение также выделяется на фоне местности.
Для правильности воспроизведения обстановки на индикаторе необходимо, чтобы одинаковые объекты давали на экране одинаковую яркость засвета независимо от различия расстояний до каждого из них. При этом, в соответствии с основным уравнением дальности действия РЛС, должно выполняться условие
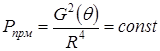 (2.1)
(2.1)
где Рпрм - мощность отражённых сигналов на входе приёмника;
G (q ) - коэффициент усиления (по мощности) антенны РЛС вертикальной плоскости;
R - дальность до объектов.
Для выполнения этого условия необходимо выбрать особый закон изменения диаграммы направленности от текущего угла q i (рис. 1).
При постоянной высоте полета Н
![]() \
\
Как следует из условия (2.1) ![]() , откуда
, откуда ![]() , т.е. коэффициент усиления антенны в вертикальной плоскости должен изменяться по закону
, т.е. коэффициент усиления антенны в вертикальной плоскости должен изменяться по закону ![]() . На рис.2.1 показана примерная форма такой диаграммы, называемой "косекансной".
. На рис.2.1 показана примерная форма такой диаграммы, называемой "косекансной".
При работе РЛС на развёртках "30", "50" и "125" обзор земной поверхности осуществляется косекансной веерной диаграммой направленности. Для получения такой диаграммы в этом режиме используется антенный отражатель (рефлектор) двойной кривизны.
При масштабе развёртки 250 км для обзора земной поверхности, в целях повышения дальностей наблюдения средних промышленных центров, используются поочерёдно два вида диаграмм направленности, переключаемых автоматически. При движении рефлектора вправо формируется узкая диаграмма направленности "карандашного" типа. За счёт большого послесвечения экрана индикатора радиолокационные изображения от узкого и веерного лучей воспринимаются оператором как единое целое. При работе на развёртке "375" обзор поверхности осуществляется только узким лучом, который имеет в два раза больший коэффициент направленного действия.
Получение с помощью одной антенной системы двух различных форм диаграммы направленности осуществляется следующим образом.
Сдвоенный отражатель антенны состоит из симметричного параболического отражателя и отражателя специальной формы, выполненного в виде "козырька" в верхней части параболоида.
Параболический отражатель при облучении его электромагнитной энергией формирует диаграмму направленности в виде узкого луча "карандашного" типа. Он изготовлен из полностью металлизированной стеклоткани. Профиль отражающей поверхности отражателя специальной формы рассчитан из условия получения в вертикальной плоскости косекансной диаграммы направленности. Этот отражатель представляет собой
поверхность двойной кривизны, выполненной из металлизированной стеклоткани, металлизированные нити которой расположены строго горизонтально и имеют шаг 3 мм. Оба отражателя жестко соединены между собой и установлены на металлический штампованный держатель чашеобразной формы. Отражатель специальной формы размещается перед симметричным параболическим отражателем и закрывает только верхнюю его часть, образуя тем самим своеобразный "козырёк" антенного рефлектора.
Формирование соответствующей диаграммы направленности осуществляется изменением плоскости поляризации излучаемых высокочастотных колебаний.
При вертикальной поляризации облучающая электромагнитная энергия беспрепятственно проходит сквозь отражатель специальной формы с горизонтальным расположением металлизированных нитей и отражается от симметричного параболоида. При этом формируется диаграмма направленности в виде узкого луча. При изменении поляризации облучающих колебаний на горизонтальную происходит отражение от являющегося для данной поляризации непрозрачным отражателя специальной формы и формируется веерная диаграмма направленности косекансного типа. На рис. 2.2 приведены диаграммы направленности в двух плоскостях для обоих режимов работы антенны.
Для поворота плоcкости поляризации излучаемых высокочастотных колебаний на 90°, необходимого для изменения формы диаграммы направленности с узкого луча на веерный, в РЛС "Гроза" применён ферритовый вращатель. Ферритовый стержень вращателя установлен на фторопластовой втулке внутри круглого волновода. Вдоль оси феррита действует постоянное магнитное поле, создаваемое электромагнитом, размещённым на волноводе.
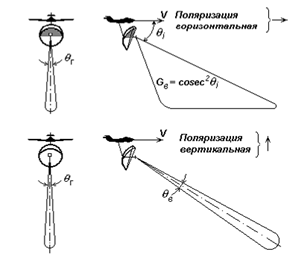
Рисунок 2.2 – Принцип получения веерной и игольчатой диаграмм направленности при смене поляризации
Угол поворота плоскости поляризации зависит от величины и направленности этого поля, которые устанавливаются с помощью реле изменения поляризации при смене режима работы станции. В режиме "Земля" (масштабы развертки "30", "50" и "125") на катушку реле подаётся напряжение от бортсети +27В. Реле при этом срабатывает и через замкнувшиеся контакты обеспечивает питание электромагнита постоянным током такой величины и направления, которые обеспечивают получение горизонтальной поляризации излучаемой энергии и, тем самым, формирование веерной диаграммы направленности. В режиме "Земля" при масштабе развёртки "375" катушка реле обесточена. При этом поляризация излучения - вертикальная и антенной формируется узкий луч. При развёртке "250" и работе РЛС в режиме "Земля" питание на катушку реле подаётся не непрерывно, а через контакты кулачкового механизма выключателя. Кулачок механизма связан с азимутальной осью антенны и обеспечивает замыкание контакта механизма при движений рефлектора в одну сторону и его размыкания при движении в противоположном направлении. За счёт этого на развертке обеспечивается черестактный обзор земной поверхности узким и веерным лучём. Для наилучшего наблюдения радиолокационных отражений от средних и крупных промышленных центров, а также для выравнивания отражений от фона, с целью наиболее чёткого воспроизведения на индикаторе водных ориентиров, в режиме "Земля" применяется "трёхтоновый" видеоусилитель. Ступенчатая амплитудная характеристика видеоусилителя позволяет исключить из радиолокационного изображения промежуточный диапазон сигналов, лежащих между слабыми и сильными, затрудняющих расшифровку изображения и ориентировку. На экране выделяются три "тона": "черный" (отсутствие отражённого сигнала, что соответствует гладким водным поверхностям); "серый" (слабые сигналы, соответствующие отражению от земной поверхности); "белый" (сильные сигналы от интенсивно отражающих объектов). Подбор оптимального характера изображения производится пилотом или штурманом применительно к конкретной обстановке с помощью ручки "Контраст". Всё управление радиолокатором при его работе в режиме "Земля" осуществляется органами управления, расположенными на лицевой панели индикаторного блока.
Режим работы "Метео".
При работе РЛС в этом режиме обеспечивается получение на индикаторе в полярных координатах "азимут-дальность" радиолокационного изображения воздушной обстановки в пространстве, ограниченном азимутальными углами ±100° относительно строительной оси самолёта и углами места ± (1,5 - 2°) относительно плоскости горизонта. Для того, чтобы сектор обзора не изменял своего положения в пространстве при кренах и тангаже самолёта, что особенно важно при обходе грозовых зон, ось диаграммы направленности антенны гиростабилизирована. При необходимости обзора пространства под другими углами места диаграмма направленности антенны может быть наклонена вручную относительно плоскости горизонта на угол ±10°.
В режиме работы "Метео" обзор пространства осуществляется РЛС с помощью симметричной узкой диаграммы направленности, получаемой в антенне при вертикальной поляризации излучаемых колебаний.
Пример радиолокационного изображения при работе РЛС в режиме "Метео" представлен на рис.2.3,а.
Всё управление РЛС в этом режиме осуществляется переключателем длительностей развёртки и ручкой ручного наклона антенны "Наклон".
Режим работы "Контур".
В этом режиме радиолокатор позволяет выявить внутри отражений от грозовых областей и кучево-дождевых облачностей наиболее опасные для полёта зоны, состоящие из водных капель большого диаметра. За счёт специального построения схемы видеоусилителя указанные участки представляются на экране индикатора в виде затемнённых областей, расположенных внутри ярких отметок от обнаруженных грозовых зон. Примерный вид радиолокационного изображения грозовых зон при включении режима "Контур" представлен на рис. 2.3,б (сравните с рис. 2.3, а).
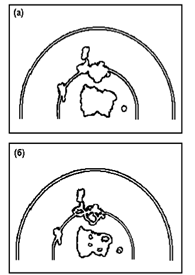
Рисунок 2.3-Пример радиолокационного изображения при работе РЛС в режиме (а) "Метео" и (б) "Контур".
Затемнение областей, соответствующих участкам с высокой отражающей способностью, обеспечивается применением специальной характеристики, подавляющей все принимаемые сигналы, амплитуда которых превосходит определённый фиксированный уровень.
Для предотвращения полного или частичного подавления сигналов от более слабых областей грозовой зоны, вызванного увеличением амплитуды отражённых сигналов при уменьшении дальности до них, в режиме "Контур" производится временная регулировка усиления приёмного устройства. Закон изменения усиления в зависимости от дальности выбран в РЛС таким, что обеспечивает практическое постоянство амплитуды принимаемых с одного и того же объекта сигналов при изменении дальности до него от 30-40 до нескольких километров. В остальном работа радиолокатора в режиме "Контур" аналогична его работе в режиме "Метео".
Режим работы "Снос"
На рис.2.4 показан навигационный треугольник скоростей с учётом только горизонтальных составляющих воздушной скорости V, совпадающей по направлению с осью самолёта, скорости ветра U и результирующего вектора, совпадающего с линией пути - путевой скорости W. Угол сноса . между векторами V и W определяется в режиме работы "Снос".
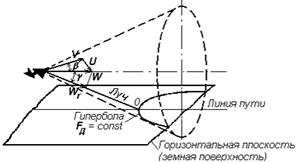
Рисунок 2.4 –Навигационный треугольник скоростей и линия равных доплеровских частот – изодоплеровская линия
Измерение угла сноса самолёта основано на фиксации минимальной частоты биений вторичного эффекта Доплера, которые возникают при отражении сигнала от земной поверхности или иных протяжённых объектов. Для пояснения этого эффекта целесообразно воспользоваться понятием линий равных доплеровских частот на земной поверхности. Принцип их получения при горизонтальном полёте представлен на рис.2.4.
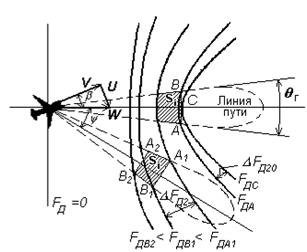
Рисунок 2.5 – Семейство изодоплеровских гипербол
Значение частоты Доплера при отражении сигнала от точки земной поверхности 0, лежащей на линии пути при бесконечно узкой диаграмме направленности РЛС, определяется
![]() , (2.2)
, (2.2)
где l - длина волны передатчика.
Из выражения (2.2) следует, что ![]() при g
= const
. Полагая g
= cons
t
, будем мысленно вращать луч вокруг вектора W , образуя лучом поверхность конуса с осью, совпадающей с W
. На земной поверхности луч прочертит кривую равных доплеровских частот, которая является гиперболой, так как образуется как линия пересечения конуса и горизонтальной поверхности, параллельной оси конуса. Полученную гиперболу называют изодоплеровской, потому что она проходит через точки земной поверхности, которым соответствует постоянная частота Доплера. Меняя значение g, можно получить семейство изодоплеровских гипербол, каждой из которых будет соответствовать своё новое значение Fд
(рис 2.5). Используя это семейство, можно определить Fд
при получении отражённых сигналов от любой точки земной поверхности,
при g
= const
. Полагая g
= cons
t
, будем мысленно вращать луч вокруг вектора W , образуя лучом поверхность конуса с осью, совпадающей с W
. На земной поверхности луч прочертит кривую равных доплеровских частот, которая является гиперболой, так как образуется как линия пересечения конуса и горизонтальной поверхности, параллельной оси конуса. Полученную гиперболу называют изодоплеровской, потому что она проходит через точки земной поверхности, которым соответствует постоянная частота Доплера. Меняя значение g, можно получить семейство изодоплеровских гипербол, каждой из которых будет соответствовать своё новое значение Fд
(рис 2.5). Используя это семейство, можно определить Fд
при получении отражённых сигналов от любой точки земной поверхности,
В реальной РЛС луч антенны имеет конечную ширину в горизонтальной q в и вертикальной .в плоскостях, а зондирующий сигнал - импульс с длительностью и. Поэтому в каждый момент времени на вход приёмника РЛС одновременно будут поступать сигналы, отражённые от совокупности отражателей, лежащих в пределах участка местности Si (рис. 2.5-2.6). Протяжённость участка Si в направлении от самолёта определяется разрешающей способностью РЛС по дальности и углом наклона gi , а в поперечном направлении - шириной диаграммы q r и произвольно выбранным расстоянием Ri .
Площадь участка Si будет приближённо равна
 . (2.3)
. (2.3)
Участок Si для двух положений диаграммы направленности антенны РЛС по азимуту, спроектированный на сетку изодопплеровских частот, показан на рис.2.5 и на рис.2.6 в трёхмерной системе координат.
Как следует из рис.2.5, если ось луча смещена относительно линии пути на угол y, то частоты колебаний, отражённых от всех точек площадки Si , различны. Наибольшее различие соответствует точкам А1 и В2 .
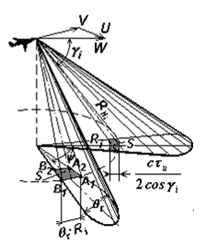
Рисунок 2.6 – Участки местности Si , сигналы от которых принимаются РЛС
Максимальная доплеровская частота в пределах участка Si будет получена от точечного отражателя в точке А1 , а минимальная - от отражателя в точке В2 (рис.2.5 –2.6).
Для равноудаленных от РЛС точек в пределах участка Si наибольшее отличие в радиальных скоростях и, следовательно, в доплеровских частотах Fд соответствует точкам А1 и В1
 ,
,
 , (2.4)
, (2.4)
где q r - ширина диаграммы направленности в горизонтальной плоскости.
Сигналы, отражённые от разных точек Si , суммируются на входе приёмника и на выходе амплитудного детектора образуют разностные частоты, которые называются вторичными доплеровскими частотами (биениями).
Для пояснения возникновения вторичных доплеровских частот рассмотрим суммарный сигнал ![]() , образованный сигналами UА1
(t
) и UВ1
(t
), отражёнными только от точек А1
и В1
площадки Si
. При этом будем считать, что РЛС работает в непрерывном режиме, излучая немодулированное синусоидальное колебание частоты f
0
, а отражённые сигналы от точек А1
и В1
имеют одинаковые амплитуды Z
А
1
=Z
В1
=Z
, образованный сигналами UА1
(t
) и UВ1
(t
), отражёнными только от точек А1
и В1
площадки Si
. При этом будем считать, что РЛС работает в непрерывном режиме, излучая немодулированное синусоидальное колебание частоты f
0
, а отражённые сигналы от точек А1
и В1
имеют одинаковые амплитуды Z
А
1
=Z
В1
=Z
 (2.5)
(2.5)
где j1
и j2
- набег фазы, возникающий при отражении зондирующего сигнала от точек А1
и В1
. Как следует из выражения (2.5) суммарный сигнал ![]() является амплитудно-модулированным. Функция
является амплитудно-модулированным. Функция
определяет закон амплитудной модуляции, а FДА 1 и FДВ 1 – частоту амплитудной модуляции.
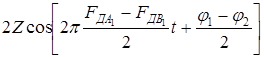
Таким образом, на выходе амплитудного детектора приёмника РЛС будет иметь место амплитудно-модулированное колебание. Огибающая амплитудно-модулированного суммарного сигнала ![]() на выходе УПЧ и соответствующее этому сигналу напряжение на выходе амплитудного детектора представлены пунктиром на рис.2.7 для двух значений отклонения диаграммы направленности антенны от линии пути
на выходе УПЧ и соответствующее этому сигналу напряжение на выходе амплитудного детектора представлены пунктиром на рис.2.7 для двух значений отклонения диаграммы направленности антенны от линии пути ![]() и
и ![]() .
.
В реальных условиях на вход приёмника РЛС одновременно поступают сигналы, отражённые от множества точек участка Si .
Доплеровские частоты этих сигналов различны и меняются, в зависимости от расположения отражающей точки площадки Si , в пределах от FДА 1 до FДВ 1 .
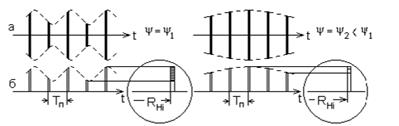
Рисунок 2.7 – Биение амплитуды сигнала, принимаемого от участка Si , на выходе УПЧ (а) и амплитудного детектора (б) при непрерывном (обозначено пунктиром) и импульсном сигнале, вызванные вторичным эффектом Доплера.
Поэтому, в результате сложения принимаемых сигналов в приёмном тракте РЛС амплитуда результирующего колебания меняется не по косинусоиде, как в рассмотренном выше примере и показано на рис. 2.8, а более сложным образом. Спектр изменения амплитуды результирующего сигнала называется спектром вторичных доплеровских частот. Для равноудалённых от РЛС точек площадки Si ширина спектра доплеровских частот будет
![]() , (2.6)
, (2.6)
где ![]() - радиальная скорость движения самолёта относительно точки земной поверхности, находящейся на линии пути под углом
- радиальная скорость движения самолёта относительно точки земной поверхности, находящейся на линии пути под углом ![]() (рис. 2.6).
(рис. 2.6).
Зависимость ширины спектра вторичных доплеровских частот от направления луча диаграммы направленности y для равноудалённых от РЛС точек характеризуется полярной диаграммой, показанной на рис. 8. В ней направление радиуса вектора соответствует углу поворота диаграммы направленности в горизонтальной плоскости y , а длина (в пределах сплошных касающихся окружностей) - ширина спектра вторичных доплеровских частот.
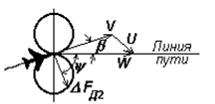
Рисунок 2.8 – Полярная диаграмма ширины спектра вторичных доплеровских частот в горизонтальной плоскости
Значение ширины спектра DFД 2 достигает минимума при установке антенны в положение, при котором проекция направления максимума диаграммы направленности на земную поверхность совпадает с направлением линии пути самолёта.
При этом частоты колебаний, отражённых от точек А и В, равны между собой и наибольшая частота биений образуется при отражении от точек С и В (или А) (рис. 2.5).
![]() . (2.7)
. (2.7)
Эта величина достаточно мала (например, при W = 720 км/ч, g = 78°, l = 5 см, ![]() =5° получим FД2О
» 4 Гц, т.е. практически нулевые биения.
=5° получим FД2О
» 4 Гц, т.е. практически нулевые биения.
Для зондирующего сигнала в виде некогерентных импульсов следует иметь в виду, что отражённые импульсы от равноудалённых целей имеют одинаковую (хотя и случайную) начальную фазу. Поэтому; при достаточно высокой частоте повторения изменение амплитуды импульсов на входе приёмника за счёт биений будет происходить также, как для амплитуды непрерывных колебаний.
Для выделения вторичных доплеровских биений в некогерентных РЛС достаточно воспользоваться обычным амплитудным детектором, в то время как в когерентных РЛС для определения требуется специальное опорное (когерентное) напряжение и фазовый детектор. За счёт вторичного эффекта Доплера амплитуда результирующего сигнала от площадки Si изменяется от одного периода повторения импульсов к другому с частотой FД 2 .
На рис. 2.8 показаны изменения амплитуды некогерентных импульсов на входе приёмника (а) и на выходе амплитудного детектора (б) за счёт вторичных доплеровских биений, принимаемых только от участка Si . При развороте антенны на угол относительно линии пути частота биений будет достаточно высока, что приводит к быстрому "мерцанию" яркости (амплитуды) отметки цели (рис. 2.8,а). При y = 0 частота биений минимальна (рис.2.7). Минимальную частоту биений можно зафиксировать на индикаторе кругового обзора, если выключена азимутальная развёртка, а угловое положение линии развёртки дальности с яркостной модуляцией отметок целей медленно изменяется лётчиком за счёт ручной регулировки азимутального положения антенны. При совпадении проекции оси косекансной диаграммы направленности с линией пути самолёта частота "мерцания" яркостных отметок всех целей на развёртке дальности будет минимальной и близкой к нулю. Угол смещения развёртки дальности относительно нуля азимутальной шкалы индикатора будет соответствовать углу сноса b самолёта (рис.2.7). При измерении угла сноса самолёта управление движением антенны по азимуту производится вручную путём периодического подключения обмотки управления азимутального электродвигателя к пониженному переменному напряжению той или иной фазы, определяющей направление движения. Это выполняется с помощью клавиш, размещённых на лицевой панели основного индикатора слева от экрана. Так как питание двигателя осуществляется при этом пониженным напряжением, то скорость азимутального движения рефлектора при измерении угла сноса меньше, чем при других режимах. Для удобства управления антенной и получения требуемой точности её установки в РЛС предусмотрена возможность плавного изменения скорости с помощью специального регулятора, совмещённого с регулятором "Контраст".
Момент совпадения оси диаграммы с линией пути определяется по уменьшению до минимума частоты "мерцания" яркостной модуляции линии развёртки, а отсчёт угла сноса производится по азимутальной шкале индикатора, имеющей градуировку через два градуса (см. рис.2.9).
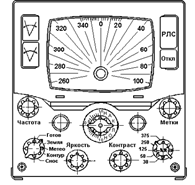
Рисунок 2.9 – Передняя панель индикаторного блока
Управление РЛС в режиме "Снос" осуществляется органами управления, расположенными на основном индикаторе. К ним относятся: переключатель длительностей развёртки; регулятор наклона антенны "Наклон"; регулятор "Контраст"; клавиши " ![]() " , расположенные слева от экрана индикатора.
" , расположенные слева от экрана индикатора.
Режим работы "Коррекция"
На ряде самолётов гражданской авиации, на которых установлены бортовые навигационные вычислители, с помощью РЛС "Гроза" может быть произведена коррекция счисленных вычислителями текущих координат места самолёта. Для этого используется какой-либо чётко наблюдаемый и легко опознаваемый объект с известными координатами и, по возможности, наименьших размеров. Его координаты вводятся в навигационный вычислитель, который при работе в специальном режиме определяет ожидаемые наклонную дальность и курсовой угол этого объекта в данный момент времени. Полученная информация передаётся вычислителем в РЛС, где она наносится на экран индикатора в виде светящегося кольца ожидаемой дальности и радиальной линии ожидаемого курсового угла (электронное перекрестие). На пересечении этих линий и должно по расчетам вычислителя находиться радиолокационное изображение наземного объекта. Так как текущие координаты места самолёта определяются вычислителем с ошибкой, точного совпадения практически не происходит и, чтобы его осуществить, необходимо изменить (увеличить или уменьшить) определённые вычислителем значения координат. Значения текущих координат места самолёта, при установке которых достигнуто совпадение, можно считать истинными и использовать в вычислителе, взамен ранее счисленных, для всех последующих расчётов до следующей очередной коррекции. Таков принцип выполнения радиолокационной коррекции. Радиолокатор при коррекции навигационного вычислителя является только индикатором совмещения, служащим для определения момента наложения перекрестия на изображение объекта. Все управление перекрестием и установка необходимых режимов работы различной аппаратуры борта осуществляется при этом с пульта вычислителя, а каких либо операций с помощью имеющихся в РЛС "Гроза" органов управления не производится. Формирование электронного перекрестия осуществляется в радиолокаторах "Гроза" в специальном блоке коррекции.
Режим работы "Готов"
Когда переключатель режимов работы установлен в положение "Готов", излучения радиоволн не происходит, но радиолокатор находится в состоянии готовности к немедленной работе, если перед этим не менее чем 5 мин он был подключен к самолетной сети с помощью клавиши "РЛС"
3. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ БЛОКОВ РЛС "ГРОЗА"
3.1 Антенный блок
Антенный блок РЛС "Гроза" предназначен для выполнения следующих функций:
излучения в пространство высокочастотных импульсов, генерируемых передающим устройством станции в пределах узкого и веерного луча в зависимости от режима работы РЛС;
приёма сигналов, отражённых от наземных и воздушных отражающих объектов;
изменения направления излучения и приёма сигналов в азимутальной плоскости;
гироскопической стабилизации осей узкого, веерного лучей в плоскости горизонта или другой заданной плоскости при кренах и тангаже самолета;
модуляции пилообразного тока развертки по закону синуса и косинуса текущего азимутального угла поворота антенны.
В зависимости от класса и типа самолёта, для установки на котором он предназначается, антенный блок носового размещения выпускается в двух модификациях, отличающихся только диаметром рефлектора (760 мм и 560 мм).
3.2 Основной приёмно-передающий блок
Приёмно-передающий блок состоит из передающей части, приёмной части и источников питания. В передающую часть входят тиристорно-магнитный модулятор и мощный СВЧ-генератор.
В приёмную часть входят высокочастотная головка (ВЧГ), предварительный усилитель промежуточной частоты (ПУПЧ), усилитель промежуточной частоты (УПЧ), узел временной автоматической регулировки усиления (ВАРУ).
Функциональная схема приёмопередатчика представлена на рис. 3.1.
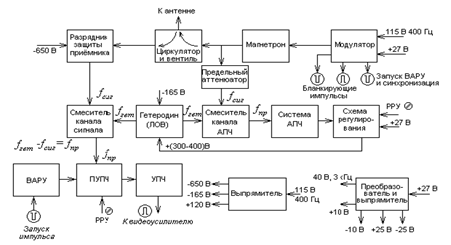
Рисунок 3.1 - Функциональная схема приёмопередатчика
Приёмопередатчик работает следующим образом.
Передающая часть. Модулятор блока формирует высоковольтный импульс отрицательной полярности, который поступает на катод магнетрона. Магнетронный генератор генерирует при этом импульсы СВЧ, поступающие к выходному волноводу блока через циркулятор ВЧГ. Циркулятор служит для переключения антенны с приёмного на передающий каналы блока.
Кроме модулирующего импульса, модулятор генерирует старт-импульс синхронизации других блоков станции, а также импульсы бланкирования самолётного ответчика системы опознавания объектов.
Приёмная часть. Отражённые от объекта и принятые СВЧ-импульсы поступают во входной волновод блока и далее через циркулятор (вентиль) и разрядник защиты приёмника на смеситель канала сигнала. На смеситель поступает также СВЧ-сигнал от гетеродина, выполненного на лампе обратной волны (ЛОВ).
После преобразования на выходе смесителя образуются импульсы промежуточной частоты, поступающие на ПУПЧ. В ПУПЧ и УПЧ с линейно- логарифмической амплитудной характеристикой происходит усиление и детектирование принятых и преобразованных сигналов. С выхода УПЧ видеосигнал поступает в индикаторный блок РЛС.
Часть СВЧ-энергии, генерируемой во время импульса магнетроном, через предельный аттенюатор поступает на смеситель АПЧ, куда также поступает СВЧ-сигнал от гетеродина. После преобразования на выходе смесителя образуются импульсы промежуточной частоты, которые поступают на вход узла АПЧ, где вырабатывается сигнал, пропорциональный отклонению промежуточной частоты от номинального значения. Этот сигнал воздействует через схему регулирования на напряжение управляющего электрода гетеродина (Л0В), перестраивая его по частоте таким образом, чтобы свести к минимуму отклонение промежуточной частоты от номинального значения.
Узел ВАРУ, запускаемый синхронно с импульсом излучения, осуществляет регулировку усиления приёмника после излучения СВЧ-импульса, а также обеспечивает его запирание на время действия мощного импульса магнетрона.
Временная регулировка усиления необходима для получения равноконтрастного изображения близких и далёких целей на экране индикатора кругового обзора (ИКО). Косекансная форма диаграммы направленности позволяет получить равноконтрастное изображение на экране индикатора, имеющего параллельные линии развёртки по дальности. Но на экране ИКО, где эти линии сходятся в центре, из-за конечного диаметра электронного пятна индикаторной трубки изображение цели, находящейся ближе к центру экрана ИКО, будет всегда ярче, чем изображение такой же цели на периферии. ВАРУ позволяет устранить это различие целей по яркости.
Принцип действия ВАРУ состоит в том, что на усилительные каскады ПУПЧ подаётся периодическое напряжение экспоненциальной формы, синхронизированное импульсами запуска передатчика.
Оно обеспечивает уменьшение усиления приёмника после излучения зондирующего импульса и затем плавное восстановление усиления до номинальной величины. Регулируя амплитуду экспоненциального напряжения схемы ВАРУ, можно добиться равноконтрастного изображения близких и далёких целей на ИКО. ВАРУ необходима также для устранения сильных засветов в центре экрана, возникающих при наблюдении морской поверхности, где отражение от волн имеет большую величину на малых дальностях и быстро убывает с расстоянием.
Ручная регулировка усиления приемника (РРУ) осуществляется с помощью переменного резистора.
3.3 Основной индикаторный блок с пультом управления
Индикаторный блок состоит из следующих функционально законченных узлов:
устройства создания радиально-секторной развёртки;
устройства синхронизации;
панели видеоусилителя;
электроннолучевой трубки (ЭЛТ) – 14ЛМ1Н со схемой питания её электродов;
стабилизированного источника высокого напряжения + 18 кВ;
пульта управления станции.
Вид передней панели блока представлен на рис.2.9.
Устройство развёртки. Устройство развёртки предназначено для формирования в отклоняющих катушках линейно нарастающих импульсов тока, модулированных по амплитуде частотой азимутального сканирования антенны и необходимых для создания на экране ЭЛТ радиально-секторной развёртки "азимут-дальность".
Упрощённая схема устройства приведена на рис. 3.2. Она представляет собой мостовую схему, плечи которой составлены из двух ключевых транзисторов ПП1 и ПП2 и двух цепочек, состоящих из диодов Д1 и Д2, резисторов R1 и R2 и конденсаторов С1 и С2. К диагоналям моста подключены источник питания + Е и нагрузка, состоящая из роторной обмотки Р2-Р4 вращающегося трансформатора (ИВТ), дросселя Др и диодных мостов М1 и М2.
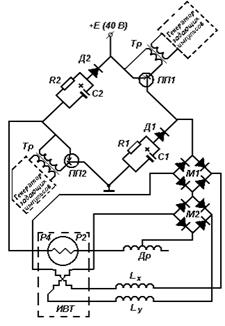
Рисунок 3.2 - Схема устройства развертки
Во время рабочего хода развёртки ПП1 и ПП2, работающие в ключевом режиме, открываются импульсом управления разверткой, и роторная обмотка ИВТ совместно с дросселем подключается через малое сопротивление открытых транзисторов и диодные мосты к источнику питания. За счёт большой индуктивности нагрузки, определяемой индуктивностью формирующего дросселя, ток в роторной обмотке ИВТ в течение всего времени открытого состояния транзисторов нарастает практически линейно. В статорных обмотках ИВТ при этом индуктируются линейно нарастающие импульсы тока, амплитуда которых изменяется пропорционально синусу и косинусу текущего азимутального угла, на который повёрнут ротор ИВТ. Последовательно со статорными обмотками ИВТ включены две создающие взаимно перпендикулярные магнитные поля отклоняющие катушки Lх и Lу. Линейно нарастающие импульсы тока, модулированные по амплитуде в одной отклоняющей катушке по закону синуса, а в другой по закону косинуса текущего азимутального угла, создают в совокупности вращающееся магнитное поле, под действием которого на экране ЭЛТ получается радиально-секторная развёртка. Во время прямого хода развёртки Д1 и Д2 закрыты, а ПП1 и ПП2 открыты. При обратном ходе развёртки ПП1 и ПП2 закрыты, а ЭДС, возникающая при этом на индуктивности нагрузки (Др и роторной обмотки), открывает Д1 и Д2, в результате чего ток замыкается через них на источник питания + Е и быстро спадает до нуля.
Цепочки из С1 и С2 служат для ускорения процесса спада тока. Диодные мосты М1 и М2 служат для фиксации начала развёртки в определённой точке экрана ЭЛТ при любых длительностях развертки и азимутальных положениях антенны за счёт того, что после запирания ПП1 и ПП2 прекращается прохождение прямого тока через них, и они оказываются закрытыми для токов отклоняющих катушек.
Ток в отклоняющих катушках становится при этом практически равным нулю, а запасённая в них энергия рассеивается до прихода следующего коммутирующего импульса на ставшем большим по величине сопротивлении диодных мостов. Этим и обеспечивается не зависящая от длительности и азимутального угла фиксация начала развёртки на экране ЭЛТ.
Устройство синхронизации.
Устройство синхронизации предназначено для формирования следующих калибрационных и управляющих сигналов: ключевого импульса управления схемой развёртки, импульса подсвета линии развёртки и калибрационных меток дальности.
Длительность вырабатываемых синхронизатором ключевых импульсов управления развёрткой и импульсов подсвета, задержка их относительно стартового импульса, а также период следования калибрационных меток дальности определяются выбранным режимом работы и диапазоном развёртки.
Функциональная схема устройства синхронизации приведена на рис. 3.3.
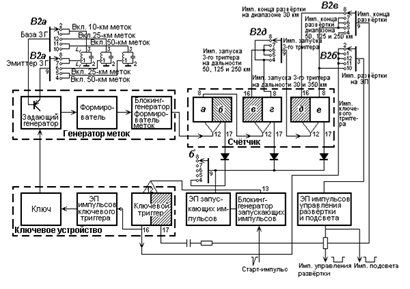
Рисунок 3.3 Функциональная схема устройства синхронизации
Работа синхронизатора начинается с приходом старт-импульсов с передатчика. Старт-импульс запускает блокинг-генератор запускающих импульсов синхронизатора, отрицательным импульсом которого открывается ключевое устройство генератора меток. В состав генератора, кроме ключевого устройства, входит задающий генератор, схема формирования (усилитель-ограничитель) и блокинг-генератор меток. В момент открытия ключевого устройства возникает генерация в задающем генераторе, причём первый полупериод генерируемого синусоидального напряжения всегда имеет отрицательную полярность, а величина периода определяется выбранной длительностью развёртки. Колебания задающего генератора преобразуются схемой формирования в прямоугольные импульсы, передним фронтом которых запускается блокинг-генератор меток дальности. С выхода блокинг-генератора метки дальности поступают для смешивания с принятым сигналом и одновременно на счётчик импульсов синхронизатора. Счётчик импульсов состоит из трёх включенных последовательно триггеров.
Эпюры напряжений синхронизатора для каждой из развёрток 50, 125 и 250 км приведены на рис. З.4.
Коммутируя запуск третьего триггера счётчика с плеча "в" на плечо "г" второго, можно получить на его выходах импульсы, положительный фронт которых совпадает с 4-, 6- и 9-й меткой, т.е. задержан относительно первой метки дальности (и, следовательно, старт-импульсов) на требуемый для любой развёртки интервал.
При первых четырёх длительностях развёртки импульсы начала развёртки, которыми являются импульсы задающего блокинг-генератора, а также импульсы конца развёртки, полученные дифференцированием первого положительного фронта импульса третьего триггера, поступают на ключевой триггер, который формирует импульсы управления развёрткой.
На развёртке "З75" импульс управления развёрткой снимается непосредственно с 3-го триггера счётчика. Через эмиттерный повторитель синхронизатора импульсы управления развёрткой поступают на схему формирования развёртки. Импульсы подсвета по длительности и задержке относительно старт-импульса всегда совпадают с импульсами развёртки. Они снимаются с выхода того же эмиттерного повторителя и подаются в видеоусилитель станции.
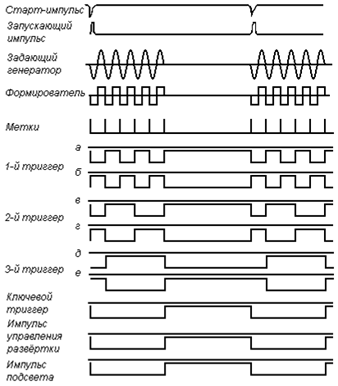
Рисунок 3.4 - Эпюры напряжений синхронизатора
Ключевой триггер синхронизатора импульсом конца развёртки опрокидывается в положение, при котором запирается ключевое устройство генератора меток. Генерация меток прекращается и возобновляется лишь с приходом следующего старт-импульса от передатчика.
Одновременно с подачей на ключевой триггер каждый импульс задающего блокинг-генератора (импульс начала каждого цикла работы) подаётся на триггеры счётчика для сброса их в исходное состояние.
При определённых значениях частоты напряжения 115 В сети питания станции, от которого осуществляется синхронизация приёмо-передатчика, на развёртке "375" 9-я метка дальности может оказаться в следующем периоде повторения импульсов передатчика, что приведёт к сбою синхронизации. Во избежание этого на развёртке "375" от ключевого триггера синхронизатора отключается импульс конца развёртки и он опрокидывается в исходное состояние следующим старт-импульсом передатчика.
Частота следования импульсов ключевого триггера при этом становится в 2 раза меньше частоты следования старт-импульсов РЛС, а длительность развёртки автоматически уменьшается таким образом, что её конец совпадает со старт – импульсом следующего периода повторения, а не с 9-й меткой дальности.
Видеоусилитель.
Видеоусилитель (ВУ) РЛС "Гроза" может иметь три различные амплитудные характеристики в зависимости от режима работы станции.
При работе в режиме "Земля" ВУ является "трёхтоновым" и имеет ступенчатую амплитудную характеристику, представленную на рис. 3.5,а.
"Трёхтоновый" ВУ (рис.3.6) состоит из двух параллельных каналов усиления; усилителя фона с ограничением сигналов, превышающих фиксированный уровень, и усилителя выделения с регулируемым уровнем отпирания. После прохождения через каналы фона и выделения сигналы смешиваются в смесителе, где к ним подмешиваются калибрационные метки дальности, и далее суммарный сигнал усиливается по напряжению оконечным усилителем.

Рисунок 3.5 - Амплитудные характеристики видеоусилителя
Основным назначением усилителя фона является повышение контрастности водных ориентиров на фоне незастроенных участков земной поверхности за счёт ограничения и выравнивания по амплитуде сигналов, отражённых от них.
Выделение сигналов от средних и крупных городов и промышленных центров, служащих ориентирами, производится усилителем выделения, уровень начала срабатывания которого может регулироваться от уровня ограничения фона вверх в широких пределах регулятором "Контраст", расположенным на лицевой панели индикатора.
Регулировка яркости радиолокационного изображения осуществляется изменением усиления ВУ.
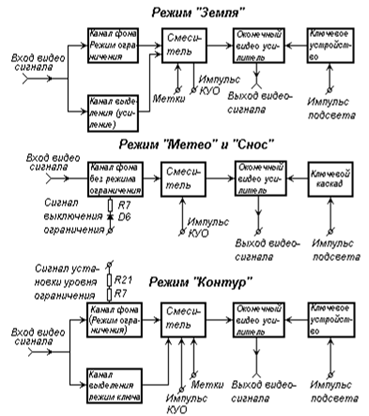
Рисунок 3.6 –Структурная схема "трёхтонового видеоусилителя"
Это позволяет одновременно и пропорционально уменьшать яркость наблюдаемого видеосигнала и смешанных с ним калибрационных меток дальности. При этом регулировка усиления выходных каскадов ВУ не изменяет уровней ограничения фона. Напряжение запирания ЭЛТ остаётся неизменным при всех регулировках и стабилизировано специальной цепочкой стабилитронов. Его установка производится специальным регулятором "Установка яркости" таким образом, чтобы при минимальной яркости изображения (при наблюдении ночью), шумы незначительно засвечивали экран.
Общее усиление ВУ выбрано таким образом, чтобы с помощью ручки "Яркость" обеспечивалась возможность максимального использования всей модуляционной характеристики ЭЛТ (т.е. всех её яркостных возможностей) при наблюдении отражений от объектов любых классов.
При работе РЛС в режиме "Метео" и "Снос" ВУ имеет обычную линейную амплитудную характеристику во всём диапазоне возможных входных сигналов (рис. 3.5,б).
В режиме "Контур" амплитудная характеристика ВУ имеет излом, после которого становится падающей с большой крутизной (см.рис.14,в). При превышении амплитуды входного сигнала определённой величины он полностью пропадает на выходе ВУ.
Импульс подсвета осуществляет управление работой ВУ во всех режимах работы. С окончанием импульса подсвета ключевое устройство оконечного усилителя запирается и сигналы на выход усилителя не проходят, какой бы амплитуды на входе они не были. Этим достигается полное отсутствие мешающих засветок экрана при обратном ходе развёртки.
Вывод для повышения дальности радиолокатора необходимо заменить магнетрон МИ-422 мощность которого составляет до 10кВт на магнетрон, на магнетрон МИ-322 мощность которого составляет 16кВт, что в свою очередь приведет к увеличению дальности обнаружения в 1,5 раза.
4. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ БЕЗОПАСНОСТИ ПОЛЕТОВ
Под безопасностью полета понимают свойство авиационной транспортной системы (состоящей из самолета, экипажа, служб подготовки и обеспечения полета и служб управления воздушным движением), заключающееся в ее способности осуществлять воздушные перевозки без угрозы для жизни и здоровья людей. Это свойство характеризуется уровнем безопасности полета, который определяется вероятностью того, что в полете не возникает катастрофическая ситуация. Принятый на практике показатель - вероятность катастрофической ситуации - оценивается для самолетов данного типа в среднем по всему парку количеством катастрофических ситуаций, приходящихся на один час полета.
При оценке безопасности полета в процессе эксплуатации учитываются также предпосылки к авиационным происшествиям. На этапе эксплуатации при классификации событий, связанных с отказами, в качестве предпосылок авиационных происшествий (инцидентов) следует рассматривать только те отказы, которые оцениваются как приводящие к сложной и аварийной ситуации.
Сложная ситуация - особая ситуация, характеризующаяся:
- заметным повышением психофизиологической нагрузки на экипаж, или
- заметным ухудшением характеристик устойчивости и управляемости иди летных характеристик, или
- выходом одного или нескольких параметров полета за эксплутационные ограничения, но без достижения предельных ограничений и(или) расчетных условий.
Аварийная ситуация - особая ситуация, характеризующаяся:
- значительным повышением психофизиологической нагрузки на экипаж или
- значительным ухудшением характеристик устойчивости и управляемости или летных характеристик, или
- приводящая к достижению (превышению) предельных ограничений и (или) расчетных условий.
Катастрофическая ситуация - особая ситуация, для которой принимается, что при ее возникновении предотвращение гибели людей оказывается практически невозможным.
По частоте возникновения события, (отказы, отказные состояния, особые ситуации, внешние воздействия) делятся на повторяющиеся, умеренно вероятные, маловероятные, практически невероятные.
При необходимости количественной оценки вероятностей возникновения событий должны использоваться следующие значения вероятностей, отнесенные либо к одному часу полета, либо к одному полету, в зависимости от характера рассматриваемого события:
- повторяющиеся - более ![]() ;
;
- умеренно-вероятные - ![]()
![]()
![]() :
:
- маловероятные - ![]()
![]()
![]() ;
;
- крайне маловероятные - ![]()
![]()
![]() ;
;
- практически невероятные - менее ![]() .
.
Рассмотренные основные положения теории безопасности полетов распространяются и на радиоэлектронное оборудование ВС. влияющее на его летную годность, т.е. способность совершать безопасные полет во всем диапазоне установленных для ВС ожидаемых условий эксплуатации при условии, что остальные компоненты авиационной транспортной системы функционируют нормально.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() 4.1 Виды и стратегии ТО РЭО
4.1 Виды и стратегии ТО РЭО
Вид ТО - техническое обслуживание, выделяемое по какому-либо отличительному признаку:
- в полете;
- между полетами;
- оперативное, выполняемое непосредственно перед вылетом и после посадки ВС для обеспечения его готовности к полету или стоянки;
- периодическое, выполняемое через установленные в эксплуатационной документации значения наработки или интервалы времени;
- в станционарных условиях, выполняемое в специально предназначенных местах, оборудованных стационарными средствами технического обслуживания;
- в полевых условиях, примерами которых являются места временного базирования ВС при выполнении авиационных химических работ в сельском хозяйстве, в местах работы геологических партий, экспедиций и др.;
- базовое выполняемое на аэродроме постоянного базирования воздушного судна до или после выполнения рейса или задания;
- транзитное, выполняемое на промежуточном аэродроме посадки ВС при выполнении рейса или задания, а также на конечном аэродроме перед обратным рейсом (промежуточным аэродромом посадки может быть аэродром постоянного базирования ВС);
- специальное, выполняемое после полета в экстремальных условиях когда внешние воздействия превышали уровень, соответствующий нормальным условиям эксплуатации. Примерами экстремальных условий являются попадание ВС в пыльную бурю, град, в зоны грозовой деятельности или турбулентной атмосферы; грубая посадка, посадка до ВПП, выкатывание с ВПП посадка с массой, превышающей максимальную посадочную и т. д.
Система ТО является системой управления техническим состоянием изделия в заданных условиях эксплуатации. Управляющие воздействия в этой системе формируются в зависимости от значений принятого признака технического состояния изделия, т. е. в соответствии с принятыми стратегиями ТО и Р.
Стратегия ТО - это система правил управления техническим состоянием изделия (РЭО) в процессе ТО. Стратегии реализуются в проведении тех или иных операций ТО.
Мероприятия по повышению надежности изделий при всех стратегиях, корректировка объемов и периодичности ТО и ремонтов осуществляются на основе анализа информации о признаках технического состояния изделий и эффективности системы ТО и Р. Однако методы анализа и использования различных видов информации зависят от стратегий ТО. Один из видов информации является основным при принятии решений о необходимом перечне операций ТО и периодичности их выполнения. Остальные данные используются для корректировки принимаемых решений с целью повышения их эффективности.
Каждая стратегия ТО определяет техническую политику и затраты на ТО или ремонт изделия и предъявляет определенные требования ко всем элементам системы ТО и Р, т. е. к объемам, средствам, исполнителям ТО и Р и к связям между этими элементами, установленными в документации.
Стратегию ТО данного типа изделия авиационной техники выбирают на основе анализа надежности изделия, влияния его отказа на безопасность и регулярность полетов, зависимости безотказности от наработки, эксплуатационной технологичности, прежде всего контролепригодности изделия, технической возможности и экономической целесообразности применения той или иной стратегии.
Стратегия ТО по наработке - это стратегия, согласно которой перечень и периодичность выполнения операций по ТО определяются значениями наработки изделия РЭО с начала эксплуатации или после капитального ремонта.
Принципы стратегии по наработке заключаются в том, что для всех однотипных изделий РЭО, устанавливаемых на ВС данного типа, определяются интервалы наработки или сроки службы, по истечении которых на РЭО выполняется определенный объем профилактических работ по настройке, регулировке, замене ненадежных элементов независимо от того, в каком техническом состоянии находится изделие. Если обозначить ![]() - планируемый объем работ, выполняемых при ТО (например, по трудоемкости), то справедливы зависимости:
- планируемый объем работ, выполняемых при ТО (например, по трудоемкости), то справедливы зависимости: ![]() ;
; ![]() ;
; ![]() , т. е. определенному интервалу наработки соответствует определенный объем работ.
, т. е. определенному интервалу наработки соответствует определенный объем работ.
Применение стратегии ТО по наработке следует осуществлять в тех случаях, когда в блоках РЭО имеются элементы, требующие периодической смазки или чистки и блоки или элементы, интенсивность отказов которых резко возрастает после определенной наработки; техническое состояние изделия или отдельных блоков не может быть определено без демонтажа, т. е. средствами встроенного контроля с достаточной полнотой или наземными средствами контроля; разброс параметров безотказности отдельных блоков невелик.
Изделие РЭО в начале проведения планового ТО может находиться в работоспособном или неработоспособном, но функционирующем состоянии. Если в начале ТО установлено, что изделие отказало, на нем должны быть проведены, помимо профилактических, также и восстановительные работы. При явном отказе в период между проведением ТО изделие РЭО восстанавливается независимо от наработки. При этом, как правило, проводится весь комплекс работ по ТО, предусмотренный очередным этапом. Распределение объемов работ по контролю ![]() и ТО
и ТО ![]() и возможные изменения совокупного параметра, характеризующие состояние изделия РЭО, приведены на рисунке 4.1
и возможные изменения совокупного параметра, характеризующие состояние изделия РЭО, приведены на рисунке 4.1
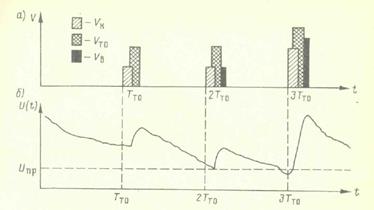
Рисунок 4.1 - Распределение объемов работ и состояний РЭО при стратегии ТО по наработке
Через определенные временные интервалы ![]() ,
, ![]() возрастает планируемый объем работ по контролю и ТО, а объем работ по восстановлению
возрастает планируемый объем работ по контролю и ТО, а объем работ по восстановлению ![]() является случайным и зависит от состояния изделий РЭО.
является случайным и зависит от состояния изделий РЭО.
Осуществление стратегии по наработке предполагает, что предупреждению подлежат только постепенные отказы. Кроме того, выход из строя изделия РЭО. обслуживаемого по наработке, может оказывать влияние на безотказность и регулярность полетов Условие однотипности определяет то, что значения наработок на отказ обслуживаемых изделий имеют небольшой разброс. Проводимые замены комплектующих изделий РЭО относятся к наиболее слабым с точки зрения безотказности элементам и узлам (например, периодические замены магнетронных генераторов в отдельных типах РЛС после наработки).
Объемы проведения работ по ТО при стратегии по наработке и периодичность ТО определяются "Регламентом ТО",- поэтому эти работы часто называют регламентными.
Стратегия ТО по состоянию (СТОС)- является стратегией, согласно которой перечень и периодичность выполнения операций определяются фактическим техническим состоянием изделия РЭО в момент начала ТО и имеет две модификации.
Стратегия ТО по состоянию с контролем параметровпредусматривает назначение перечня и периодичности операции ТО, в том числе замены изделия, по результатам контроля технического состояния каждого изделия. Контроль может быть непрерывным (в полете) или периодическим (при выполнении оперативных и периодических ТО). Периодичность контроля обычно устанавливается единой для парка изделий.
Применение стратегии ТО с контролем параметров в эксплуатационной документации предусматривает установление предотказного значения параметра, определяющего техническое состояние изделия. При достижении параметром этого значения изделие считается неисправным и требующим проведения операций ТО или текущего ремонта. Эту стратегию целесообразно применять для изделий авиационной техники, обладающих достаточной контролепригодностью, отказы которых не влияют на безотказность и регулярность полетов, а значения наработок до отказа имеют существенный разброс. Она позволяет обеспечить безопасность полетов за счет раннего, до наступления отказа, обнаружения дефектов и повысить экономическую эффективность эксплуатации путем максимально возможного использования работоспособности каждого изделия.
Операции по ТО или текущему ремонту назначаются при установлении предотказного или неработоспособного состояний, которые должны быть однозначно определены в эксплуатационной документации по всем диагностическим параметрам. Операции по ТО и текущему ремонту назначаются по результатам планового контроля (рис. 4.2), который, в свою очередь, зависит от состояния изделия РЭО. Объем работ ![]() является планируемым и регламентированным, а объем ТО
является планируемым и регламентированным, а объем ТО ![]() восстановления
восстановления ![]() случайным, зависящим от состояния изделии РЭО и результатов контроля, диагностических параметров.
случайным, зависящим от состояния изделии РЭО и результатов контроля, диагностических параметров.

Рисунок 4.2 - Распределение объемов работ РЭО при стратегии ТО по состоянию.
Упреждающий допуск диагностического параметра
характеризует диапазон его изменения, в котором в соответствии с эксплуатационной или ремонтной документацией нарушается исправность изделия при сохранении его работоспособности. Изменение технического состояния характеризуется параметром ![]() , значение которого определяет это состояние (рис. 4.3);
, значение которого определяет это состояние (рис. 4.3); ![]() ,
, ![]() и
и ![]() - номинальное, наименьшее предотказное и предельно допустимое значения параметра соответственно, установленные в нормагнвно-технической документации;
- номинальное, наименьшее предотказное и предельно допустимое значения параметра соответственно, установленные в нормагнвно-технической документации; ![]() и
и ![]() - моменты контроля;
- моменты контроля; ![]() и
и ![]() - моменты перехода в другое состояние. Область 1 - исправное состояние, область 2- предотказное (неисправное, но работоспособное) состояние, когда требуется проведение операций по восстановлению исправности изделия, область 3 - неработоспособное состояние изделия. Упреждающий допуск
- моменты перехода в другое состояние. Область 1 - исправное состояние, область 2- предотказное (неисправное, но работоспособное) состояние, когда требуется проведение операций по восстановлению исправности изделия, область 3 - неработоспособное состояние изделия. Упреждающий допуск ![]() и периодичность контроля
и периодичность контроля ![]() должны быть такими, чтобы значение параметра после достижения уровня
должны быть такими, чтобы значение параметра после достижения уровня ![]() при наработке
при наработке ![]() до момента
до момента ![]() не достигло значения
не достигло значения ![]() с вероятностью, не меньшей заданной. Упреждающий допуск параметра устанавливается для предупреждения перехода объекта в неработоспособное состояние.
с вероятностью, не меньшей заданной. Упреждающий допуск параметра устанавливается для предупреждения перехода объекта в неработоспособное состояние.
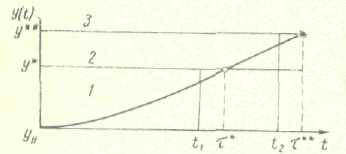
Рисунок 4.3 - Допуски на изменение совокупного параметра РЭО при стратегии ТО по состоянию
Стратегия ТО РЭО по состоянию с контролем уровня надежности предусматривает, что каждое изделие используется по назначению до отказа, после наступления которого производятся операции текущего ремонта. Операции ТО по поддержанию надежности назначаются по результатам контроля уровня надежности парка изделий, в том числе контроля с использованием статистических методов и регулирования качества продукции. Применяется эта стратегия для тех типов РЭО, отказы которых непосредственно не влияют на безопасность полетов, значения наработок на отказ имеют существенный разброс, вероятность безотказной работы подчиняется экспоненциальному закону. Стратегия экономически эффективна, так как работоспособность изделия используется полностью.
Внедрение ТО с контролем уровня надежности предусматривает решение ряда организационно-технических задач, основными из которых являются:
- организация системы постоянного оперативного сбора и обработки информации о надежности, позволяющей фиксировать фактический уровень безотказности ![]() и данные об отказах (место возникновения, причины, проявления). Эта информация сосредотачивается в базовых АТБ и контролируется на протяжении всего периода эксплуатации изделия;
и данные об отказах (место возникновения, причины, проявления). Эта информация сосредотачивается в базовых АТБ и контролируется на протяжении всего периода эксплуатации изделия;
- определение верхнего допустимого уровня безотказности ![]() ;
;
- организация оперативного сравнения фактического уровня безотказности с допустимым и анализ последствий сравнения;
- разработка мероприятий по поддержанию уровня безотказности совокупности эксплуатируемых изделий, таких, как назначение дополнительных работ по ТО, изменение периодичности контроля безотказности, изменение условий эксплуатации, выполнение конструктивных доработок, временный переход на ТО по наработке.
Решение этих задач требует наличия на авиапредприятиях инженерного персонала, ведущего контроль уровня надежности и оперативный анализ этого уровня, владеющего математическим аппаратом для определения периодичности ТО.
Качество технической эксплуатации характеризуется уровнями безопасности и регулярности полетов, интенсивностью использования ВС, экономным расходованием материальных и трудовых ресурсов.
Эффективность процесса технической эксплуатации является основной целью ИАС и достигается совершенствованием AT, внедрением в производство прогрессивных методов и высокопроизводительных средств ТО, улучшением форм организации труда, повышением его качества и производительности, экономией трудовых затрат, топливно-энергетических ресурсов и других материальных средств.
Инженерный состав ИАС обязан постоянно анализировать эффективность технической эксплуатации ВС, разрабатывать и осуществлять мероприятия по совершенствованию инженерно-авиационного обеспечения полетов, повышению интенсивности использования ВС, снижению себестоимости ТО авиационной техники.
4.2 Составление оптимального алгоритма поиска места отказа
Поиск места отказа(ПМО) производится после установления факта неработоспособного состояния изделия РЭО, что принимается в качестве достоверного события ![]() . Определение части изделия, отказ которой приводит к возникновению состояния неработоспособности, называется поиском места отказа. Физически отказ РЭС сопровождается или прекращением функционирования (явный отказ), или выходом параметра за пределы допусков(неявный отказ).
. Определение части изделия, отказ которой приводит к возникновению состояния неработоспособности, называется поиском места отказа. Физически отказ РЭС сопровождается или прекращением функционирования (явный отказ), или выходом параметра за пределы допусков(неявный отказ).
Локализация отказа частично происходит при фиксации неработоспособного состояния. Однако почти всегда ПМО и восстановление работоспособного состояния изделий РЭО (т. е. текущий ремонт) осуществляется в цехе А и РЭО АТБ. Причем поиск места отказа осуществляется в несколько этапов:
- определение неработоспособного состояния РЭС;
- определение отказавшего блока (РЭУ) с точностью до сменной сборочной единицы;
- поиск места отказа с точностью до отказавшего восстанавливаемого или заменяемого электроэлемента;
- восстановление отказавшего блока (РЭУ);
- восстановление отказавшей РЭС.
Неопределенность ситуаций при ПМО оказывается значительно выше, чем при контроле работоспособности.
Алгоритмы ПМОделятся на две большие группы: "негибкие" и "гибкие" алгоритмы.
Негибкие алгоритмы реализуют жесткие программы ПМО, использующие априорные данные о техническом состоянии изделия РЭО, полученные расчетным путем или на основе статистической обработки информации об отказах устройств-аналогов.
Гибкие алгоритмы, помимо априорной, используют апостериорную информацию, получаемую в результате проверок технического состояния РЭУ. входящих в РЭС. Операции поиска меняются в зависимости от места возникновения отказа. При возникновении отказа в конкретной точке данного РЭУ "мягкий" алгоритм будет всегда одним и тем же, так как он составляется путем минимизации затрат по выбранному заранее критерию.
Органолептические методы ПМО составляют группу, в основе которой лежат различные (трудно классифицируемые) факторы;
- совокупность параметров полезных и сопутствующих сигналов;
- активные признаки нормальной работы отдельных частей на основе постоянно функционирующих датчиков и контрольных сигнализаторов;
- пассивные признаки, сопровождающие работу системы, например тепловые режимы отдельных изолированных блоков.
Совокупности признаков характерных отказов и их проявлений, присущих данной системе, обычно в виде специальных таблиц включают в технические описания или инструкции по ТО РЭО и руководствуются ими в процессе технического диагностирования.
Перечни характерных неисправностей и их проявлений содержатся также в таких документах, как технологические указания по выполнению регламентных работ различных видов РЭС в лабораториях ремонтных предприятий отраслевого профиля.
Группа методов ПМОс использованием статистических данных основана на предварительном сборе и обработке информации об отказах РЭУ, отдельных блоков, изучении априорных данных о характерных повреждениях и дефектах аналогичных изделий и их составляющих. На основании проработки статистического материала формируется алгоритм последовательного ПМО.
Метод "время-безотказность" -
один из путей составления алгоритма, заключающийся в следующем. Если известны вероятности отказов ![]() всех диагностируемых блоков РЭС, а также
всех диагностируемых блоков РЭС, а также ![]() - среднее время диагностирования каждого блока в процессе ПМО, то принцип ранжировки проверок при ПМО следующий: для каждого блока находим отношение
- среднее время диагностирования каждого блока в процессе ПМО, то принцип ранжировки проверок при ПМО следующий: для каждого блока находим отношение ![]() /
/![]() , строим алгоритм по принципу
, строим алгоритм по принципу ![]() …
…![]() .
При реализации этого алгоритма среднее время диагностирования системы оказывается минимальным.
.
При реализации этого алгоритма среднее время диагностирования системы оказывается минимальным.
Оптимальный алгоритм ПМО на основе информационного подхода
составляется следующим образом. По ФДМ РЭО, для которого формируется алгоритм, строится матрица состояний (проверки ![]() - строки, состояния
- строки, состояния ![]() - столбцы). Под каждым значением
- столбцы). Под каждым значением ![]() указывается его нормированное значение
указывается его нормированное значение ![]() ;
; ![]() . При отсутствии сведений о безотказности состояния
. При отсутствии сведений о безотказности состояния ![]() принимаются равновероятными.
принимаются равновероятными.
Функция предпочтения для каждой строки ![]()
![]() (рис. 4.4);
(рис. 4.4);
![]()
Где ![]() - число единиц в строке, умноженное на соответствующие вероятности состояний;
- число единиц в строке, умноженное на соответствующие вероятности состояний; ![]() - число нулей в той же строке.
- число нулей в той же строке.
В качестве первой проверки выбирается та, для которой функция предпочтения ![]() , т. е. имеет наименьшее значение. Далее проверки идут по двум почти равноинформативным ветвям. Для результата
, т. е. имеет наименьшее значение. Далее проверки идут по двум почти равноинформативным ветвям. Для результата ![]() строим новую матрицу, в которую попадают состояния
строим новую матрицу, в которую попадают состояния ![]() ,
соответствовавшие единице. Дли этой матрицы также следует вычисление функции предпочтения
,
соответствовавшие единице. Дли этой матрицы также следует вычисление функции предпочтения
![]() ,
,
и процедура повторяется до получения однозначного ответа по каждому элементу блока ветви.
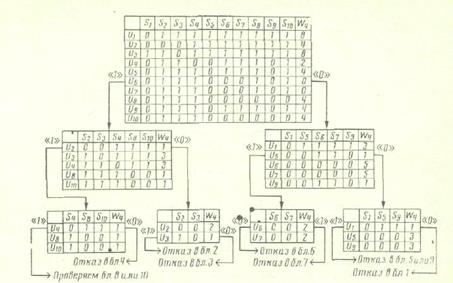
Рисунок 4.4 - Составление оптимального алгоритма поискаместа отказа
Для результата проверки ![]() также строится соответствующая матрица, в которой принимают участие состояния
также строится соответствующая матрица, в которой принимают участие состояния ![]() с результатом проверки, равным "нулю". Для всех строк этой матрицы также вычисляют функции предпочтения по вышеприведенной формуле, и следующая проверка выбирается по
с результатом проверки, равным "нулю". Для всех строк этой матрицы также вычисляют функции предпочтения по вышеприведенной формуле, и следующая проверка выбирается по ![]() . Процедура повторяется вновь.
. Процедура повторяется вновь.
При необходимости данный алгоритм может быть построен с учетом стоимости диагностирования (напомним, что под стоимостью можно понимать затраты любого рода, в том числе и временные).
Функция предпочтения при учете стоимости ![]() и достоверности
и достоверности ![]() имеет вид:
имеет вид:
![]() ,
,
а процедура построения алгоритма ПМО остается одной и той же.
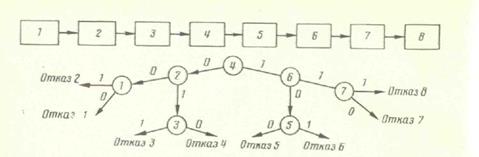
Рисунок 4.5 - Алгоритм диагностирования методом половинных разбиений
Метод половинных разбиений на практике для ПМО широко используется, особенно при наличии последовательной (пли близкой к таковой) структуры. В схеме отказавшего РЭУ находят среднюю точку (средний блок) с учетом или без учета вероятности отказа, проверяют состояние изделия в этой точке, после чего в зависимости от результата проверяется правая или левая часть схемы.
![]()
![]()
![]()
![]() 4.3Совокупность ДП и алгоритмов диагностирования
4.3Совокупность ДП и алгоритмов диагностирования
Выбор совокупности ДП и алгоритма диагностирования (АД) определяется такими факторами, как целевая функция объекта, стратегия ТО, набор средств технического диагностирования, время и стоимость диагностирования и т. д.
Совокупность ДП зависит от тех режимов диагностирования, в которых последнее производится. Поэтому следует говорить о совокупностях ДП для определения состояний: функционирования, работоспособности, поиска дефекта (повреждения), локализации места отказа при замене, поиска места отказа при ремонте, контроля работоспособности (исправности) после проведения всех восстановительных и монтажных работ.
Главный фактор при выборе совокупности ДП — информативность — полнота проверок, характеризуемая соответствующим коэффициентом ![]() .
.
Стоимость СТД также является важным фактором и включает стоимость диагностирования и средств диагностирования.
Результат диагностирования РЭУ может фиксировать его неработоспособность, а может и не фиксировать (если не прекратилось функционирование), следовательно, больше внимания при формировании совокупности ДП следует уделять выбору номинальных значений и назначения допусков. Если в качестве ДП выбираются ПФИ, то допуски назначаются из тактических соображений. Если же схема РЭУ такова, что требуется в качестве ДП использовать технические параметры, в этом случае необходимо установление взаимосвязей между ПФИ и ТП, и назначение допусков на ТП производится в зависимости от тактических допусков на ПФИ с учетом взаимовлияния.
Проверка функционирования РЭО предшествует проведению контроля работоспособности.
Совокупность ДП для определения функционирования выбирается для РЭС, управление которыми осуществляет оператор или информация от которых используется непосредственно человеком. Основу этой совокупности составляют ПФИ непосредственно оконечных устройств. К числу таких параметров относятся: параметры воспроизведения звука в радиоприемнике; бук-вопечатание (на телеграфном аппарате); шумовой подсвет развертки индикатора РЛ.
Органояептический метод проверки изделий РЭО на функционирование отнюдь не лишен возможностей выявления повреждений в РЭУ, даже в случае формально работоспособного изделия (не говоря уже о функционирующем). Опытный инженер всегда отметит, например, факт перегрева отдельных точек монтажа в РЭУ с мощными выходными каскадами в случае возникновения такового.
Руководство по ТЭ изделий РЭО содержит таблицы с перечнем параметров, позволяющих выявить основные (возможные) признаки, которые харакЫтеризуют функционирование или прекращение такового путем визуальных наблюдений.
Часть параметров РЭУ и С, которая не может быть проконтролирована визуально, контролируется с помощью специальных упрощенных встроенных средств диагностики и контроля, работающих в режиме "годен — не годен".
4.4 Выбор минимальной и достаточной совокупности параметров для проверки работоспособного состояния
Определение работоспособного состояния является одной из наиболее важных задач диагностирования и представляет собой ту операцию ТО, после которой следует разветвление алгоритма. Если изделие РЭО работоспособно. ТО фактически прекращается, если оно находится в неработоспособном состоянии, то начинается следующий этап диагностирования — поиск места отказа, связанный с привлечением дополнительных сил и средств, временных затрат и с выводом изделия РЭО из режима функционального использования.
Работоспособное состояние — строго регламентируемое понятие, которое определяется государственными стандартами и закрепляется техническими условиями на конкретный тип радиоэлектронного оборудования. 0тказ РЭО во время своего функционального применения и затраты, связанные с этим отказом, могут во много раз превзойти затраты на диагностирование изделия в работоспособном состоянии.
Диагностирование сложных РЭС сопряжено с значительными материальными и временными затратами, простоями дорогостоящего оборудования, которые желательно минимизировать с целью повышения качества и эффективности диагностирования, но не в ущерб достоверности и полноте диагностирования.
Перечисленные факторы делают задачу выбора ДП для контроля работоспособности сложной, многоплановой и ответственной.
Совокупность ДП для контроля работоспособности обычно включает ПФИ и ряд технических параметров. На совокупность параметров, определяющих работоспособное состояние, задаются нормы, которые называются нормами технических параметров (НТП).
Часть ДП поддается прямым электрическим измерениям. Эти параметры образуют множество прямых параметров ![]() , измерение которых должно давать однозначный ответ, работоспособна или нет диагностируемая система. На практике множество
, измерение которых должно давать однозначный ответ, работоспособна или нет диагностируемая система. На практике множество ![]() ,
, ![]() заменяется подмножество
заменяется подмножество ![]() , где
, где ![]() в силу того, что не все параметры поддаются прямым измерениям. В этом случае для получения более полной информации о работоспособном состоянии множество
в силу того, что не все параметры поддаются прямым измерениям. В этом случае для получения более полной информации о работоспособном состоянии множество ![]() дополняется подмножеством косвенных параметров
дополняется подмножеством косвенных параметров ![]() , задача которого компенсировать образовавшуюся разность
, задача которого компенсировать образовавшуюся разность ![]() , обусловленную трудностями прямых измерений. В качестве критерия эффективности введения косвенных параметров может быть использована норма вектора чувствительности:
, обусловленную трудностями прямых измерений. В качестве критерия эффективности введения косвенных параметров может быть использована норма вектора чувствительности:
![]() ,
,
в которой
или
Выбор минимальной и достаточной совокупности ДП для определенияработоспособного состояния сложной многопараметрической системы может быть реализован с помощью метода ориентированных графов или информационного метода.
Функциональная схема изделия РЭО должна быть положена в основу модели.
Ориентированный граф строится на основе функциональной схемы или на основе ФДМ. Функциональная схема тракта синхронизации и формирования развертки РЛС (рис. 4.6) и ее ФДМ (рис. 4.7) позволяют построить ориентированный граф (рис. 4.8, а). Каждая вершина графа по своему физическому смыслу соответствует выходу блока, т. е. ДП, а совокупность вершин составляет совокупность ДП.
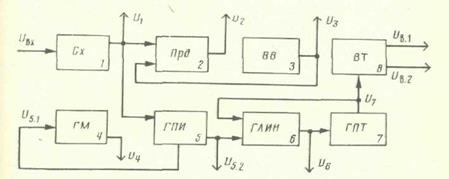
Рисунок 4.6-Структурная схема передающего и индикаторного трактов РЛ
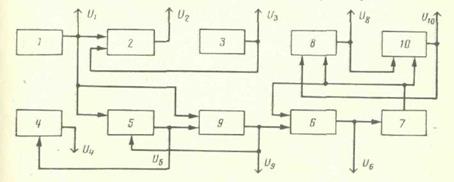
Рисунок 4.7 - Функциональная диагностическая модель

Рисунок 4.8 - Ориентированный и простой граф структурной схемы
Минимизация этой совокупности ![]() осуществляется путем преобразования графа. Для каждого множества вершин
осуществляется путем преобразования графа. Для каждого множества вершин ![]() существует так называемое наименьшее внешнее устойчивое множество, в которое заходят все дуги из остальных вершин, т. е. внешнее устойчивое множество вершин и есть та минимальная и достаточная совокупность ДП, которая полностью характеризует состояние системы.
существует так называемое наименьшее внешнее устойчивое множество, в которое заходят все дуги из остальных вершин, т. е. внешнее устойчивое множество вершин и есть та минимальная и достаточная совокупность ДП, которая полностью характеризует состояние системы.
После минимизации совокупности ДП следует задача ранжировки параметров с точки зрения оптимизации алгоритма контроля.
5. ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ
Экономическое обоснование дипломного проекта, посвященного МНРЛС с детальной разработкой канала обнаружения ЗОТ возможно на основе комплексного учёта технических, экономических и социальных факторов. Канал обнаружения ЗОТ позволит выявить опасные метеообразования в направлении полёта самолёта, что существенно повысит безопасность полёта. Во время пролёта через ЗОТ, помимо понижения комфортности полёта пассажиров (толчки, резкая смена давления и т.п.), планер ВС испытывает дополнительные динамические нагрузки, снижающие время наработки на отказ радиооборудования ВС. Дополнительные капитальные затраты на модернизацию МНРЛС компенсируется в будущем при эксплуатации снижением материальных и трудовых затрат на ремонт и ТО ВС. Для экономического обоснования предложенных инженерных идей, необходимо вычислить:
1. Производственные затраты.
2. Эксплуатационные затраты.
3. Показатели оценки эффективности инвестиций (капитальных затрат).
5.1 Производственные затраты
Производственные затраты Спр на создание равны сумме связанных с этим процессом всех видов издержек (затрат).
Спр =Ссм +Ср +Ск +Ссто ,
где Ссм – материальные издержки; Ср – издержки на оплату персонала; Ск – калькуляционные издержки; Ссто – издержки на оплату услуг сторонних организаций.
5.1.1 Материальные издержки Cми
Cми = См +Сп , руб.;
где: Cм = Смо + Cмв +Смт – стоимость материалов;
Смо – стоимость основных материалов;
Cмв – стоимость вспомогательных материалов;
Смт – стоимость технологических материалов;
Сп – стоимость покупных изделий.
Расчёт стоимости материалов, идущих на изготовление одной МНРЛС приведён в табл.5.1.
Расчет стоимости материалов таблица № 5.1.
| № | Наименование материала | Единица измерения | Норма расхода с учётом потерь | Цена за едини-цу | Индекс роста цен в 2005г. | Затраты на единицу продукции | |||||
| Основные материалы | |||||||||||
| 1. | СтеклотекстолитFR-4-2-35-1,5 | кг | 0,3 | 802,0 | 1,11 | 264,66 | |||||
| 2. | Провод монтажный МГШДГ – 0,25 | кг | 0,1 | 17,6 | 1,05 | 1,85 | |||||
| Итого: | 265,51 | ||||||||||
| Вспомогательные материалы | |||||||||||
| 3. | Кислота соляная | л | 0,22 | 230,0 | 1,2 | 60,72 | |||||
| 4. | Припой ПОС – 16 | кг | 0,250 | 434,4 | 1,13 | 122,72 | |||||
| 5. | Канифоль | кг | 0,18 | 137,80 | 1,12 | 27,78 | |||||
| 6. | Нитролак Э4110 | л | 0,2 | 65,0 | 1,12 | 15,0 | |||||
| 7. | Спирт | л | 0,18 | 75,0 | 1,05 | 14,18 | |||||
| 8. | Ацетон | л | 0,250 | 150 | 1,1 | 41,25 | |||||
| 9. | Лак бесцветный АК-113 | кг | 0,2 | 55,8 | 1,05 | 11,72 | |||||
| Итого: | 278,38 | ||||||||||
| Технологические материалы | |||||||||||
| 10. | Электроэнергия | кВт | 10 | 2,5 | 1,25 | 31,25 | |||||
| 11. | Газ | м3 | 1,0 | 8,8 | 1,2 | 10,56 | |||||
| 12. | Вода | м3 | 1,5 | 7,0 | 1,12 | 11,76 | |||||
| Итого: | Смт =53,57 | ||||||||||
| Всего: | См = 597,45 | ||||||||||
5.1.2 Стоимость покупных комплектующих изделий Сп
Расчет стоимости покупных изделий выполнен по данным на 01.10.08 и показан в таблице 5.2.
Расчет стоимости покупных комплектующих Сп - таблица 5.2
| № | Наименование изделия |
Марка тип |
Расход | Оптовая цена | Суммарная стоимость |
| 1. | Интегральные Микросхемы |
К555ИР-27 К555ИР-16 К555ИМ-6 К555ИП-32 К555ЛА-3 |
6 4 20 4 1 |
10,5 14,9 22,8 20,8 5,60 |
63,0 59,6 456,0 83,2 5,6 |
| 5. | Конденсаторы | КМ-5А | 10 | 6,5 | 65,0 |
| 6 | Разъем печатн. | 1 | 20,5 | 20,5 | |
| Итого: Сп | 691,9 |
Учитывая индекс роста цен, рассчитываем их на конец 2008г
Сп = С*п kн = 691,9*1,1=761,1 руб
Материальные издержки составят:
Сми =См +Сп =597,5+761,1=1358,6 руб.
5.1.3 Издержки на оплату труда персонала Ср
Издержки на оплату труда персонала, принимающего участия в изготовления радиостанции равны:
Ср =С0 +Сди
где С0 =Ст +Сдо +Снб =1,3*Ст – основная ЗППР;
Ст - тарифная заработная плата (ЗП) производственным рабочим (ПР);
Сдо – периодические доплаты;
Снб – постоянные надбавки;
Сди =Ссц +Сст +Сп =0,48*С0 – дополнительные издержки;
Ссц - законодательные социальные издержки (единый социальный налог);
Сст – социальные издержки по тарифному соглашению;
Сп – прочие издержки.
Оплата труда работников определена гражданско-правовыми договорами. Размер выплат по соглашениям определён объёмом и составом работ по изготовлению, трудоёмкостью, необходимой квалификацией персонала и соответствующими часовыми тарифными ставками.
Расчет тарифной заработной платы производственных рабочих (Ст ) за выполнение технологических операций приведем в табл.5.3.
Расчет тарифной заработной платы Ст таблица 5.3.
| № | Виды работ | Средний разряд | Часовая ставка руб/час | Трудоемкость чел/час |
Сумма руб |
| 1. | Заготовительные | 2 | 12,5 | 1,0 | 12,5 |
| 2. | Лакокрасочные | 3 | 15,0 | 4,0 | 60,0 |
| 3. | Слесарные | 3 | 15,0 | 2,5 | 31,0 |
| 4. | Монтажные | 5 | 18,5 | 8,0 | 148,0 |
| 5. | Регулировочные | 5 | 20,0 | 5,0 | 100,0 |
| 6. | Испытательные | 5 | 20,0 | 8,0 | 160,0 |
| 7 | Сборочные | 4 | 20,0 | 4,0 | 80,0 |
| 8. | Гальванические | 4 | 18,8 | 6,0 | 112,8 |
| Итог: С*т | 704,3 |
Учитывая индекс роста цен, заработной платы к концу 2005
Ст =704,3*1,15 = 809,9 руб.
Алгоритм, модели и результаты расчета суммарных издержек на оплату труда персонала сведем в таблице 5.4.
Расчет суммарных издержек на оплату труда Ср таблица 5.4.
| Шаг | Статья затрат | Усл. обоз | Расчетная модель | Расчетная величина руб. |
| 1. | Тарифная ЗП ПР | Ст | Из табл. 3 | 809,9 |
| 2. | Доплата ПР (пер) | Сдо | 0,25*Ст | 202,5 |
| 3. | Надбавки (пост) | Снб | 0,05*Ст | 40,5 |
| 4. | Основная ЗП | С0 | Ст +Сдо +Снб | 1052,9 |
| 5. | Социальные издержки по тарифному соглашению | Сст | 0,17*С0 | 178,9 |
| 6. | Социальные издержки по законодательству | Ссц | 0,26*С0 | 273,7 |
| 7. | Прочие издержки | Сп | 0,05*С0 | 52,6 |
| 8. | Дополнительные издержки | Сди | 0,48*С0 | 505,2 |
| 9. | Суммарные издержки | Ср | С0 +Сди | 1558,1 |
5.1.4 Калькуляционные издержки Ск
Так как проект разрабатывается сторонним заводом- изготовителем, а не силами работников эксплуатационного авиапредприятия, то необходимо рассчитать весь перечень калькуляционных издержек.
Калькуляционные издержки равны сумме:
Ск =Сам + Скп + Скр ,
где Сам – амортизационные отчисления;
Скп – калькуляционные проценты;
Скр – калькуляционный риск.
Алгоритм модели и результаты расчета Cк сведем в таблице 5.5.
Расчет калькуляционных издержек Ск. таблица 5.5
| Шаг | Статья затрат | Усл. обоз | Расчетная модель | Расчетная величина |
| 1. | Амортотчисления | Сам | Сам =0,35*С0 | 368,5 |
| 2. | Калькуляционные проценты | Скп | Скп =0,25*С0 | 263,2 |
| 3. | Калькуляционный риск | Скр | Скр =0,75*С0 | 789,7 |
| 4. | Калькуляционные издержки | Ск | Ск =Сам +Скп +Скр | 1421,4 |
Таким образом, с учетом роста тарифов и ЗП калькуляционные издержки составят:
Ск =1421,4 руб.
5.1.5 Издержки на оплату услуг сторонних организаций
Сумма выплат за услуги сторонних организаций может быть определенна по модели:
Ссто = Снр +Свн + Соп + Ста + Сма + Сц + С03
где Снр – расходы на НИР и ОКР; Свн –внепроизводственные расходы; Соп – операционные издержки; Ста – торгово – административные издержки; Сма – маркетинговые издержки; Сц – цеховые издержки; С03 – общезаводские издержки.
Алгоритм модели и результат расчета Ссто покажем в таблице 5.6.
Расчет на оплату услуг сторонних организаций Ссто таблица 5.6
| Шаг | Статья затрат | Усл. обоз | Расчетная модель |
Расчетная величина, руб |
| 1. | Расходы на НИР и ОК | Снр | Снр =0,15*С0 | 157,9 |
| 2 | Внепроизводственные расходы | Свн | Свн =0,5*Ст | 404,9 |
| 3. | Операционные издержки | Соп | Соп =0,4*С0 | 421,1 |
| 4. | Торгово-административные издержки | Ста | Ста =0,3*С0 | 315,9 |
| 5. | Маркетинговые издержки | Сма | Сма =0,45*Ст | 364,4 |
| 6. | Цеховые издержки | Сц | Сц =0,2*С0 | 210,6 |
| 7. | Общезаводские издержки | Со | Соз =0,25*С0 | 263,2 |
| 8. | Оплата услуг сторонних организаций | Ссто | 2138,0 |
Ссто = 2138,0 руб.
5.2 Стоимость реализации проекта Спр
Стоимость реализации проекта Спр определяется как сумма составляющих статей калькуляции, рассчитанных выше. Результаты в расчёта стоимости реализации МНРЛС с детальной разработкой канала обнаружения ЗОТ приведены табл.5.7
Стоимость реализации проекта Спр - таблица 5.7.
| № | Наименование издержек | Усл. обоз | Затраты руб | Удельный вес, % |
| 1 | Материальные издержки Сырье и материалы-основные материалы -вспомогательные материалы -технологические материалы Покупные комплектующие |
Сми См Смо Смв Смт Сп |
1358,6 597,5 265,5 278,1 53,6 761,1 |
21,04 |
Издержки по оплате трудаОсновная заработная плата-тарифная ЗП ПР -доплаты ПР (пер) -надбавки (пост) Дополнительные издержки-соц. издержки (законод) -соц. издержки (тариф соглаш) -прочие издержки |
Ср Со Ст Сдо Снб Сди Ссц Сст Сп |
1558,1 1052,9 809,9 202,5 40,5 505,2 273,7 178,9 52,6 |
24,0 | |
Калькуляционные издержки Амортизационные отчисления Калькуляционные проценты Калькуляционный риск |
Ск Сам Скп Скр |
1421,4 368,5 263,2 789,7 |
21,95 | |
Оплата услуг СТОРасходы на НИР и ОКР Внепроизводственные расходы Операционные издержки Торгово – администр. издержки Маркетинговые издержки Цеховые издержки Общезаводские издержки |
Ссто Скр Свн Соп Ста Сма Сц Соз |
2138,0 157,9 404,9 421,1 315,9 364,4 210,6 263,2 |
33,01 | |
| Себестоимость проекта | Спр | 6476,1 | 100 |
5.3 Цена изделия Ци
Т.к МНРЛС разрабатывается и реализуется заводом-изготовителем, то разумная цена производимой им продукции будет зависеть от спроса, но не должна быть меньше величины:
Ци =Cпр +Нпр +Ндс ,
где Cпр – себестоимость проекта (производственные затраты);
Нпр – норма прибыли завода изготовителя (20% от Спр );
Ндс – налог на добавленную стоимость (18% от Cпр +Нпр ),
Ци =6476,1+0,2*6476,1+0,18*(0,2*6476,1+6476,1) = 9100руб.
5.4 Инвестиции, необходимые для реализации проекта (Invest).
Инвестиции, необходимые для реализации проекта можно рассчитать по следующей формуле:
Invest = Ци +Стр +Смн +С34 +Сс3,
где Стр – стоимость транспортировки изделия к месту эксплуатации в ГА; в зависимости от удаленности завода – изготовителя от авиапредприятия может быть равна 15¸200% цены изделия;
Смн – стоимость монтажа на месте эксплуатации, 15¸25% от цены изделия;
С34 – стоимость запасных частей, 0,3¸2 Ци ;
Сс3 – прочие сопряженные инвестиции, связанные с обеспечением нормального функционирования проектируемого изделия, 10¸15 Ци .
Invest=Ци+0,1Ци+0,15Ци+0,25Ци+0,1*Ци=1,6Ци
Invest = 1,6*9100 = 14560 руб.
5.5 Эксплуатационные затраты
В общем случае эксплуатационные расходы могут быть вычислены по формуле:
Сэ=Сзп+Сам+Сэл+Сто+Спр, руб.
где Сзп - расходы на оплату труда обслуживающего персонала, руб;
Сам – амортизационные отчисления, руб;
Сэл – затраты на электроэнергию, руб (для бортового оборудования не определяем);
Сто – затраты на ТоиР;
Спр – прочие расходы.
Расчет эксплуатационных расходов проведём только для проектируемого варианта.
5.5.1 Издержки на оплату труда Сзп
Вследствие значительного увеличения наработки на отказ, можно утверждать, что сократится количество отказов МНРЛС, что приведёт к снижению трудоёмкости ТО, поиска и устранения отказа и относительной экономии заработной платы обслуживающего персонала.
Сзп= np * tто* fт* Кдоп* Кди , руб
где tто – трудоёмкость ТО (поиска и устранения отказа) чел.-ч;
np – численность производственных рабочих. В соответствии с разработанной инструкцией по ТО смотровые и проверочные работы могут выполняться двумя техниками чел.;
fт – среднечасовая тарифная ставка персонала на ТО, руб/ч;
Кдоп.,Кди – коэффициенты, учитывающие доплаты, надбавки и дополнительные издержки (модель расчета приведена в таб.5.8).
таблица 5.8
| Виды работ | Затраты времени на операцию, ч | Фактически отработанное время в год, ч | Разряд авиатехника | Среднечасовая ставка, руб./ч |
| Демонтаж | 0,5 | 1,5 | 2 | 15,8 |
| Проверка | 2,5 | 7,5 | 4 | 22,5 |
| Ремонт | 3,0 | 9,0 | 4 | 22,5 |
| Монтаж | 0,5 | 1,5 | 2 | 15,8 |
Сзп = 2*(3,0*15,8*1,3*1,48+16,5*22,5*1,3*1,48)=805,5 руб.
5.5.2 Амортизационные отчисления Сам
Сумма амортизационных отчислений вычисляется в зависимости от условий эксплуатации и по видам оборудования.
Для бортового оборудования:
Сам = Ци *Нам / 100, руб.
где: Ци – цена изделия, руб
Нам – норма амортизации на реновацию, %
Сам = 9100*8 / 100 = 728,0
5.5.3 Затраты на ТО и Р (СТО иР. )
Затраты на ТО и Р включает в себя стоимость профилактического ТО и стоимость неплановых ремонтов, вызванных отказами изделия. В дипломном проекте материальные затраты на ТоиР бортового оборудования можно принять равными 1,5% от их цены, тогда:
СТО иР =0,015*Ци ,
СТО иР =0,015*9100 = 136,5 руб.
5.5.4 Прочие расходы Спроч .
Прочие расходы включают в себя стоимость различных материалов, потребляемых в процессе эксплуатации. Примем затраты по этой статье в размере 1,0% от цены изделия.
Спроч =0,01* Ци
Спроч =0,01*9100 = 91,0 руб.
Результаты расчётов эксплуатационных расходов для проектируемого изделия приведены в таб.5.9.
Эксплуатационные расходы (Сэ) таблица 5.9.
| № | Наименование затрат | Проектируемый вариант, руб |
| 1 | Издержки по оплате труда | 805,5 |
| 2 | Амортизационные отчисления | 728,0 |
| 3 | Затраты на ТОиР | 136,5 |
| 4 | Прочие расходы | 91,0 |
| Итого: | 1761,0 |
5.6 Потоки денежных поступлений СF( t )
Результат реализации проекта - поток денежных поступлений на основе которого вычисляются показатели экономической оценки эффективности инвестиций.
В дипломном проекте источником денежных поступлений служит дополнительная прибыль, возникающая вследствие экономии лётного времени на маршруте и расходов, относимых на себестоимость летного часа.
![]() Эг
= Нг
*Слч
,
Эг
= Нг
*Слч
,
где Нг - экономия лётного времени на маршруте, ч.;
Слч – себестоимость летного часа.
По данным АК "Аэрофлот-Дон" себестоимость летного часа для самолета ТУ-154 составит 46000 руб.
Для вычисления годового экономического эффекта при эксплуатации устройства воспользуемся рис.5.1
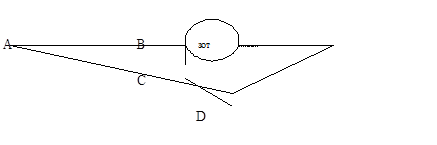
Рисунок 5.1 - Траектория полёта ВС при обходе ЗОТ
Рисунок выполнен в масштабе 1:50км. Здесь изображены два возможных варианта обхода ЗОТ воздушным судном:
L1 = АВ + ВС + СD = 5,8+0,9+1,8=8,6см
В реальном масштабе L1 = 430 км
L2 = 7,2 см
В реальном масштабе L2 = 360 км.
По траектории AD движется ВС, оснащенное разработанным устройством. Тогда экономия расстояния на маршруте составит:
DL = L1 – L2 = 430-360 = 70 км
Рассчитаем экономию лётного времени:
DН = ![]() = 0,08ч.
= 0,08ч.
По статистическим данным в зоне аэропорта г. Ростова-на-Дону самолёт попадает в подобную ситуацию в среднем 5 раз в год. При этом годовая экономия лётного времени на 1 ВС составит:
DНг =DН*5=0,08*5=0,4ч
Годовая экономия по эксплуатационным расходам, относимых на себестоимость лётного часа будет равна:
DЭ=0,4*46000=18400 руб
Тогда окончательная величина ежегодного потока денежных поступлений должна быть уменьшена на сумму годовых эксплуатационных расходов по внедряемой МНРЛС:
CF( t ) = 18400-1761.0=16639.0 руб,
Ежегодные денежные поступления, равные 16639,0 руб. в последующие годы будут менять свою ценность из-за инфляции, повышения тарифов и окладов, колебаний процентных ставок, котировок ценных бумаг, курсов валют и т.п. факторов. Чтобы соизмерить разновременные денежные поступления их приводят к ценности того года, в котором началось осуществление проекта, т.е. дисконтируют. Т.к. размер инвестиций невелик (14560 руб), справедливо предположить, что инвестиции осуществлены единовременно за счет собственных средств предприятия, и процесс отдачи от инвестиций начинается сразу после их завершения, т.е. на 1 году реализации проекта.
Для приведения CF(t) к году инвестирования капитала в проект используем формулу:
DCF( t ) = CF( t ) /(1+E)t
где: Е - норма (ставка) дисконта;
t – t-ый год из жизненного цикла проекта (t=1….5 лет).
Для собственника капитала ставка дисконтирования идентифицируется с нормой дохода, ожидаемой от вложений капитала, поэтому, чем больше шансы потерять, тем выше ставка дисконтирования. Поэтому ставка дисконта учитывает риск деловых операций (m,%). Для обычных проектов с низким уровнем риска примем m=2%. Ставка дисконта зависит также от величины реального дохода на капитал, положенного в банк на депозит (r,%). По состоянию на 01.12.2005 года процентная ставка по депозиту не превышает в среднем 12% годовых. Учитывая вышеизложенное, определим базовое значение Е или минимально требуемую доходность на инвестиции, связанные с нашим проектом:
Е = (1+r)*(1+m)-1;
Е = (1+0,12)*(1+0,02)-1=0,1424;
Е = 14%.
В потоках денежных поступлений должна также учитываться инфляция. Примем ежегодный рост цен за пятилетний рассматриваемый период в размере 12%.
Жизненный цикл проекта составит пять лет, потому что это- время износа активной части основных производственных фондов в ГА, следовательно, через пять лет можно ожидать морального устаревания предложенной модернизации МНРЛС. Прогнозные значения DCF( t ) за последующие 5 лет при различных значениях Е приводятся в таблице 5.10.
Потоки дисконтированных денежных поступлений. таблица 5.10.
| t | CFc(t) | DCF(t) | ||||
| Е = 0,0 | Е = 0,14 | Е = 0,28 | Е = 0,42 | Е = 0,56 | ||
| 1 | 16639 | 18640 | 16350 | 14560 | 13120 | 11950 |
| 2 | 16639 | 20870 | 16060 | 12740 | 10350 | 8577 |
| 3 | 16639 | 22380 | 15780 | 11150 | 8164 | 6158 |
| 4 | 16639 | 26180 | 15500 | 9753 | 6439 | 4421 |
| 5 | 16639 | 29320 | 15230 | 8534 | 5079 | 3174 |
5.7 Расчет показателей оценки эффективности инвестиций
На основе дисконтированных потоков денежных поступлений вычисляем следующие показатели:
1. Срок окупаемости (tok)
2. Чистый дисконтированный доход (ЧДД)
3. Индекс доходности (ИД)
4. Внутренняя норма рентабельности (IRR& )
Расчеты этих показателей проведены на Matchad.PLUS.6.0
5.7.1 Чистый дисконтированный доход (ЧДД)
Величина ЧДД определяется как сумма текущих эффектов за весь расчетный период, приведенная к начальному шагу. Если ЧДД>0, проект является эффективным при заданной норме Е и продолжительности получения дохода. Чем > ЧДД, тем эффективнее проект.
![]()
Результаты расчета ЧДД при различных значениях Е и Invest = 14560 руб. приведены в таблице 12.
5.7.2 Срок окупаемости инвестиций (tok)
Срок окупаемости инвестиций (tok) – это время, необходимое для возмещения первоначальных инвестиций. Оно определяется делением суммы инвестиций на сумму поступлений денежных средств, получаемых в результате реализации проекта за счет увеличения доходов или за счет экономии на расходах. Предпочтение отдается проекту с наименьшим tok. Такой проект является менее рискованным и имеет большую ликвидность.
Дисконтированный срок окупаемости рассчитывается исходя из равенства:
![]()
где Invest – сумма первоначальных инвестиций;
DCF( t ) – ежегодные дисконтированные денежные поступления.
Срок окупаемости для Invest = 14560 руб. и различных значениях Е = 0,14![]() 0,56 приведён в таблице 5.11.
0,56 приведён в таблице 5.11.
Дисконтированные сроки окупаемости инвестиций - таблица 5.11.
| T =1 | T =2 | T =3 | T = 4 | T = 5 | Tок , лет | |
| Исходный (Е=0,0) | 18640 | 20870 | 23380 | 26180 | 29320 | 0,929 |
| Дисконтирванный (Е=0,14) | 16350 | 16060 | 15780 | 15500 | 15230 | 0,890 |
| Дисконтирванный (Е=0,28) | 14560 | 12740 | 11150 | 9753 | 8534 | 1,0 |
| Дисконтирванный (Е=0,42) | 13120 | 10350 | 8164 | 6439 | 5079 | 1,139 |
| Дисконтирванный (Е=0,56) | 11950 | 8577 | 6158 | 4421 | 3174 | 1,304 |
На рис. 2 показан график окупаемости проекта для заданной минимальной доходности на инвестиции, т.е. для Е = 0,14.
5.7.3. Индекс доходности (ИД)
Индекс доходности является одним из показателей, на основании которых принимается решение о целесообразности инвестиций. Он показывает величину чистого дисконтированного дохода на каждый рубль инвестиций. Чем выше показатель доходности, тем предпочтительнее проект. Если индекс равен 1 и ниже, то проект едва отвечает или не отвечает минимальной ставке доходности.
ИД = ![]() (t)
(1-E)-t
/ Invest
(t)
(1-E)-t
/ Invest
В табл.5.12 приведены результаты расчетов ИД при Е=0,14![]() 0,56
0,56
5.7.4 Внутренняя норма рентабельности проекта IRR&
Внутренняя норма рентабельности проекта IRR& , называемая коэффициентом рентабельности инвестиций, в случае, когда инвестиции осуществляются единовременно, в начале первого года, равна ставке дисконтирования IRR& =Е, при которой сумма будущих дисконтированных поступлений равна инвестициям. Если инвестиции осуществляются из собственных средств, то доход окупает инвестиции при ставке доходности, равной ожидаемой инвестором доходности на свой капитал. Величина IRR& определяется из уравнения:
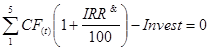
Показатель IRR можно вычислить на ЭВМ, либо определить графически (см.рис.5.2)
На рисунке 5.3 представлена иллюстрация IRR для tок .
Динамика показателей эффективности инвестиций - таблица 5.12
| Т | Е | tok | DCF(t) | t+1 å DCF(t) t |
ЧДД, руб | ИД |
| 1 | 0,14 0,28 0,42 0,56 |
0,890 1,0 - - |
16350 14660 13120 11950 |
16350 14560 13120 11950 |
+1787 +100 -1436 -2614 |
1,123 1,0 0,901 0,82 |
| 2 | 0,14 0,28 0,42 0,56 |
1,139 1,304 |
16060 12740 10350 8577 |
32410 27300 23470 20520 |
+17850 +12740 +8195 +5963 |
2,226 1,875 1,612 1,41 |
| 3 | 0,14 0,28 0,42 0,56 |
15780 11150 8164 6158 |
48190 38450 31640 26680 |
+33630 +23890 +17080 +12120 |
3,309 2,64 2,173 1,832 |
|
| 4 | 0,14 0,28 0,42 0,56 |
15500 9753 6439 4421 |
63690 48200 38080 31100 |
+49130 +33640 +23520 +16540 |
4,374 3,31 2,615 2,136 |
|
| 5 | 0,14 0,28 0,42 0,56 |
15230 8534 5079 3174 |
78920 56730 43160 34270 |
+64360 +42170 +28600 +19710 |
5,42 3,896 2,964 2,354 |
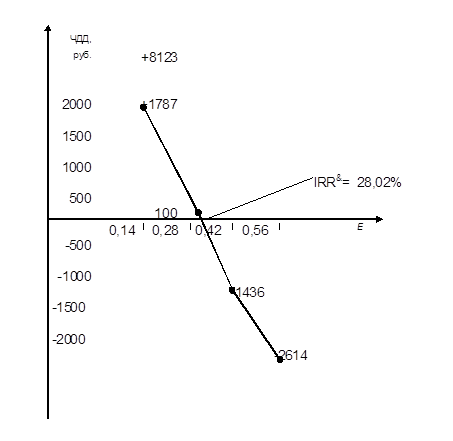
Рисунок 5.3 - Зависимость ЧДД для f(E)
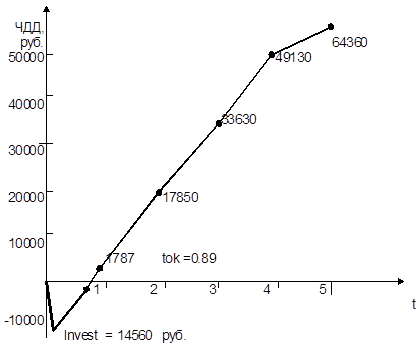
Рисунок 5.2. - График окупаемости проекта для Е=0,14
Таблица 5.13 Технико –экономическое обоснование проекта
| Наименование показателя | Ед. изм | Базовый вариант | Проектируемый вариант |
Технические показатели1. Наработка на отказ |
Час |
60000 |
102040 |
Экономические показатели1.Цена проекта 2. Инвестиции |
Руб. Руб. |
- - |
9100 14560 |
Показатели экономической эффективности инвестиций 1. Срок окупаемости 2. Чистый дисконтированный доход в tok 3. Индекс доходности в tok 4. Внутренняя норма рентабельности проекта |
Год Руб - % |
- - - |
0,89 1787 1,123 28,02 |
Вывод: Полученные данные свидетельствуют об экономической целесообразности внедрения МНРЛС с детальной разработкой канала обнаружения ЗОТ.
Срок окупаемости инвестиций в проект при минимальной доходности 14% составит 0,89 года; чистый дисконтированный доход вtok равен 1787 руб., что >0; индекс доходности при Е=0,14 >1 и равен1,123; внутренняя норма рентабельности проекта составила 28,02%, это больше требуемой минимальной доходности и говорит об устойчивости проекта. Таким образом, можно с уверенностью говорить об эффективности инвестиций в данный проект.
6. БЕЗОПАСНОСТЬ И ЭКОЛОГИЧНОСТЬ
6.1 Биологическое действие СВЧ–излучения на организм человека
Воздействие мощных электромагнитных полей на человека приводит к определенным сдвигам в нервно-психической и физиологической деятельности, однако как предполагают, "многоступенчатая" система защиты организма от вредных сигналов, осуществляемая на всех уровнях от молекулярного до системного, в значительной степени снижает вредность действия "случайных" для организма потоков информации [20]. Поэтому, видимо, если и наблюдается определенная реакция на эти поля, то здесь нужно говорить скорее о физиологическом, в общем смысле, чем о патологическом аспекте воздействия электромагнитной энергии. Несмотря на то, что нетепловые, или специфические эффекты воздействия радиоволн открыты относительно давно, определяющим для нормирования опасности работы в условиях воздействия ЭМП во многих странах пока принята степень их теплового воздействия.
Для выяснения биофизики теплового действия СВЧ на живые организмы рассмотрим кратко факторы, определяющие нагрев тканей при облучении их ЭМП.
Существование потерь на токи проводимости и смещения в тканях организма приводит к образованию тепла при облучении. Количество тепла выделяемое в единицу времени веществом со среднем удельным сопротивлением (Ом/см) при воздействии на него раздельно электрической (Е) и магнитной (Н) составляющих на частоте f (Гц) определяются следующими зависимостями
Qe = 8,4×10×f×E (Дж/мин);
Qп = 8,4×10×f×H (Дж/мин).
Доля потерь в общей величине поглощенной теплом энергии возрастает с частотой.
Наличие отражения на границе "воздух-ткань" приводит к уменьшению теплового эффекта на всех частотах приблизительно одинаково.
Коэффициент отражения Ко от границ между тканями при различных частотах представлен в таблица6.1.
Таблица 6.1
| Частота, МГц | |||||||
| Границы раздела | 100 | 200 | 400 | 1000 | 3000 | 10000 | 24500 |
| воздух -кожа | 0,758 | 0,684 | 0,623 | 0,57 | 0,55 | 0,53 | 0,47 |
| кожа –жир | 0,340 | 0,227 | - | 0,231 | 0,190 | 0,230 | 0,22 |
| жир – мышцы | 0,355 | 0,351 | 0,33 | 0,26 | - | - | - |
С учетом Ко плотность мощности, поглощаемая телом, будет равна
Ппогл = П×( 1- Ко ),
где П - плотность потока мощности.
Глубина проникновения энергии СВЧ вглубь тканей зависит от резисторных и диэлектрических свойств ткани и от частоты.
Глубина проникновения энергии СВЧ в различные ткани при изменении поля в е раз в долях длины волн представлена в таблица 5.2.
Соизмеримость размеров тела с длинной волны приводит к появлению существенной частотной зависимости взаимодействия поля с телом. Эффект облучения тела человека сильно зависит от поляризации и ракурса освещения его радиоволн CВЧ.
Существование между различными слоями тела слоев с малой диэлектрической проницаемостью приводит к возникновению резонансов - стоячих волн большой амплитуды, которые приводят к так называемым микро-нагревам.
Перераспределение тепловой энергии между соседними тканями через кровь наряду с конвенционной отдачей энергии теплоиспусканием в окружающее пространство во многом определяет температуру нагреваемых участков тела. Именно из-за ухудшенной системы отвода тепла от некоторых сред ( глаза и ткани семенников - в них очень мало кровеносных сосудов). Эти органы тела наиболее уязвимы для облучения. Критическим для глаз считается повышение температуры на 100 С. Высокая чувствительность семенников к облучению связана с известным фактом, что при нагревании их всего на 10 С. Возникает частичная или полная временная стерилизация.
Таблица 6.2
| l, см. | ||||||||
| Ткань | 300 | 150 | 75 | 30 | 10 | 3 | 1,25 | 0,86 |
| Головной мозг | 0,012 | 0,028 | 0,028 | 0,064 | 0,048 | 0,053 | 0,059 | 0,043 |
| Хрусталик глаза | 0,029 | 0,030 | 0,056 | 0,098 | 0,050 | 0,057 | 0,055 | 0,043 |
| Стекловидное тело | 0,007 | 0,011 | 0,019 | 0,042 | 0,054 | 0,063 | 0,036 | 0,036 |
| Жир | 0,068 | 0,083 | 0,120 | 0,210 | 0,240 | 0,370 | 0,270 | - |
| Мышцы | 0,011 | 0,015 | 0,025 | 0,050 | - | 0,100 | - | - |
| Кожа | 0,012 | 0,018 | 0,029 | 0,056 | 0,066 | 0,063 | 0,058 | - |
Кроме теплового действия радиоволн СВЧ на живой организм, оказывает влияние и специфическое их действие.
Наиболее общим эффектом действия радиоволн на организм человека (электромагнитных излучений малых уровней) является дезадонтация - нарушение функций механизма, регулирующих приспособительные реакции организма к изменениям условий внешней среды ( к теплу, холоду, шуму, психологических травм т. п. ) т. е. СВЧ поле является типичным стрессом.
К специфическим эффектам воздействия поля также относятся:
- кумуляция - приводит к тому, что при воздействии прерывистого облучения суммарных эффект накапливается и зависит от величины эффекта с самого начала воздействия;
- сенсибилизация - заключается в повышении чувствительности организма после слабого радиооблучения к последующим воздействиям;
- стимуляция - улучшение под влиянием поля общего состояния организма или чувствительности его органов.
В России проводятся широкие исследования, направленные на выяснения профессиональной вредности СВЧ радиоволн. Исследования позволили выявить у лиц, подвергающихся хроническому СВЧ воздействию, определенные изменения со стороны нервной и сердечно-сосудистой систем, эндокринных желез, крови и лимфы, хотя в подавляющем большинстве случаев эти изменения носят обратимый характер. При хроническом действии СВЧ поля были обнаружены также случаи помутнения хрусталика и снижения обонятельной чувствительности человека.
При плотности мощности СВЧ поглощаемой телом ( П ) больше 5-10 мВт/cм, и хроническом действии полей меньшей интенсивности, наблюдается, как правило, отрицательное влияние облучения, появляется повышенная утомляемость, слабость, вялость, разбитость, раздражительность, головокружение. Иногда наблюдается приливы к голове, чувство жара, половая слабость, приступы тошноты, потемнения в глазах. Изучаются генетические последствия воздействия радиоволн.
Электромагнитное поле вокруг любого источника излучения волн условно разделяют на три зоны:
- ближнюю – зону индукции;
- промежуточную – зону интерференции;
- дальнюю – волновую зону или зону излучения.
Если геометрические размеры источника излучения меньше длины волны излучения (точечный источник), границы зон ближней (индукции), промежуточной (интерференции) и дальней (излучения) соответственно определяются из следующих неравенств
![]() ; (6.1)
; (6.1)
![]() ; (6.2)
; (6.2)
![]() . (6.3)
. (6.3)
Электромагнитные поля по мере удаления от источника быстро затухают. Напряженность электрической составляющей поля в зоне индукции (ближней зоне) обратно пропорционально расстоянию в третьей степени, а напряженность магнитной составляющей – расстоянию во второй степени. В дальней зоне (зона излучения) напряженность электромагнитного поля обратно пропорционально расстоянию в первой степени.
При остронаправленных источниках излучения (антеннах) с размерами, значительно большими длины волны, граница дальней зоны может быть рассчитана по формуле
![]() , (6.4)
, (6.4)
где SA – наибольший геометрический размер раскрыва излучающей антенны, равный 2,6 м.
 .
.
В волновой зоне (дальней зоне), в которой практически находятся работающие с СВЧ аппаратурой, интенсивность поля оценивается величиной плотности потока энергии (ППЭ), т. е. количеством энергии, падающей на единицу поверхности. В этом случае ППЭ выражается в ваттах на один квадратный метр или в милливаттах и микроваттах на один квадратный сантиметр.
Согласно максимальное значение ППЭПД не должно превышать значения 1000 мкВт/см2 .
Предельно допустимые значения ППЭ электромагнитного поля в диапазоне частот 300 МГц…300 ГГц следует определять исходя из допустимой энергетической нагрузки и времени воздействия по формуле
 , (6.5)
, (6.5)
где ППЭПД – предельно допустимое значение ППЭ,
![]() - предельно допустимая величина электрической нагрузки, равная 200 мкВт·ч/см2
,
- предельно допустимая величина электрической нагрузки, равная 200 мкВт·ч/см2
,
К – коэффициент ослабления биологической эффективности, равный 10 для случаев облучения от вращающихся и сканирующих антенн,
Т – время пребывания в зоне облучения за рабочую смену, равное 8 ч.
![]() .
.
С учетом вышеприведенных расчетов можно сделать вывод о том, что удаление обслуживающего персонала РЛС (в частности дежурного оператора) на расстояние более 500 м от антенны является необходимым и достаточным условием для защиты от вредного воздействия СВЧ излучения.
6.2 Классификация и общие характеристики чрезвычайных ситуаций
Чрезвычайная ситуация (ЧС) - внешне неожиданная, внезапно возникающая обстановка, которая характеризуется резким нарушением установившегося процесса, оказывающая значительное отрицательное влияние на жизнедеятельность людей, функционирование экономики, социальную сферу и окружающую среду.
Классификация ЧС:
- по принципам возникновения (стихийные бедствия, техногенные катастрофы, антропогенные катастрофы, социально-политические конфликты);
- по масштабу распространения с учетом последствий - местные (локальные), объектные, региональные, национальные, глобальные;
- по скорости распространения событий - внезапные, умеренные, плавные (ползучие), быстро распространяющиеся.
Последствия чрезвычайных ситуаций разнообразны: затопления, разрушения, радиоактивное заражения, и т.д.
Условия возникновения ЧС подразумевают наличие потенциальных опасных и вредных производственных факторов при развитии тех или иных процессов. Действие факторов риска высвобождение энергии в тех или иных процессах, наличие токсичных, биологически активных компонентов в процессах и т.д.
В условиях рассматриваемой работы наиболее вероятна ЧС, связана с возникновением пожара.
Рассмотрим вопрос возникновения ЧС связанных пожаром в результате короткого замыкания в электропроводке.
Режим короткого замыкания появляется в результате резкого возрастания силы тока, электрической искры, пробоя изоляции в процессе старения или перетирания из-за вибрации и как далее.
При возникновении короткого замыкания происходит резкий нагрев токоведущих частей, что приводит к воспламенению изоляции. Это приводит к пожару в электрооборудовании с выделением большого количества дыма.
В данной ситуации необходимо персоналу применять меры индивидуальной защиты - одеть изолирующие противогазы и термокостюмы, отключить от питания электроустановку и приступить к тушению пожара порошковым огнетушителем.
В некоторых случаях применяются системы автоматического пожаротушения, это порошковые и газовые системы. Они действуют по принципу прекращения доступа к источнику возгорания кислорода при повышении температуры или появления дыма.
Для предотвращения возникновения ЧС связанного с возгоранием в следствии короткого замыкания применяют следующие профилактические меры:
- установка предохранителей на питании электроустановок;
- периодический контроль сопротивления изоляции;
- установка приборов контролирующих ток в наиболее опасных по короткому замыканию местах;
- установка датчиков контролирующих наличие дыма в местах возможного возгорания электропроводки;
- установка в близи электроустановок средств пожаротушения и индивидуальной защиты.
6.3 Экологические мероприятия по защите от СВЧ
Передающая антенна включает в себя мощные СВЧ устройства, в которых генераторы высокочастотной энергии имеют мощность около сотен киловатт в импульсном режиме. Даже если небольшая часть этой мощности просачивается в окружающее установку пространство, это может представлять опасность для окружающих: воздействие достаточно мощного СВЧ излучения на зрение, нервную систему и другие органы человека может вызвать серьезные болезненные явления. Поэтому при работе с мощными источниками СВЧ энергии необходимо неукоснительно соблюдать требования техники безопасности.
В нашей стране установлена безопасная норма СВЧ излучения, т.е. так называемая санитарная норма - 10 мкВт/см![]() . Она означает, что в месте нахождения обслуживающего персонала мощность потока СВЧ энергии не должна превышать 10 мкВт на каждый квадратный сантиметр поверхности. Эта норма взята с многократным запасом. Так, например, в США в 60-е годы была норма в 1000раз большая - 10 мВт/см
. Она означает, что в месте нахождения обслуживающего персонала мощность потока СВЧ энергии не должна превышать 10 мкВт на каждый квадратный сантиметр поверхности. Эта норма взята с многократным запасом. Так, например, в США в 60-е годы была норма в 1000раз большая - 10 мВт/см![]() .
.
Следует отметить, что по мере удаления от мест излучения СВЧ мощности - от резонаторных камер или волноводных систем, где производится обработка с помощью СВЧ энергии, - поток излученной энергии быстро ослабевает (обратно пропорционально квадрату расстояния). Поэтому можно установить безопасную границу, где уровень излучения ниже нормы, и выполнить её в виде ограждения, за которое нельзя заходить во время выполнения технологического процесса. При этом защитные устройства получаются достаточно простыми и недорогими.
В настоящее время существует несколько видов как твердых, так и мягких (типа резины) поглощающих материалов, которые уже при толщине в несколько миллиметров обеспечивают практически полное поглощение просачивающейся СВЧ энергии.
Поглощающий материал закладывается в щели между теми металлическими деталями резонаторных камер или волноводных структур, которые не могут быть соединены сваркой или пайкой.
Предотвращение излучения через отверстие для наблюдения или подачи воздуха осуществляется применением металлических трубок достаточно малого внутреннего диаметра и необходимой длины. Такие трубки являются запредельными волноводами и практически не пропускают СВЧ энергию. Необходимо, чтобы внутренний радиус R был в 10...15 раз меньше рабочей длины волны. В этом случае погонное затухание (в децибелах на сантиметр) на низшем типе волны H11 может быть приблизительно определено по формуле
L=16/R. (6.6)
Общее затухание при длине трубки N становится равным
16N/R дБ. (6.7)
Рассмотрим численный пример. Пусть рабочая длина волны l=3 см. Возьмем трубку с внутренним радиусом R=1 см. Пользуясь формулой (6.6) для L , определим, что на каждом сантиметре длины трубки погонное затухание
L=16/1=16 дБ/см.
Если мощность СВЧ колебаний резонатора составляет 10,76 кВт, а вне трубки будем считать допустимой мощность 1 мкВт, то на длине трубки N должно быть ослабление
10,67 кВт/1мкВт=10,67×103 /10-6 =10,67×109 раз,
где 10,67×109 раз примерно равно 100 дБ.
Подставив полученные значения в формулу (6.2) получим длину трубки равной
N=100/L=108/16=6,2676 см.
Окончательно длину трубки с внутренним диаметром 10 мм можно принять равной 6 см. Как видим, безопасный уровень излучения может быть получен при не очень длинных трубках и при достаточно больших диаметрах.
Для установок СВЧ характерна необходимость многоразового открывания и закрывания люков загрузки, и т.д. От этих операций защитные устройства, в особенности контактные, постепенно изнашиваются. Кроме того, с течением времени контактные поверхности окисляются. В результате излучение может возрасти в несколько раз и даже на один-два порядка. Поэтому необходимы систематическое наблюдение за состоянием защитных устройств, проведение периодических замеров уровня излучения. Отсюда и жесткие требования к надежности защитных устройств. Чтобы в эксплуатации нормы облучения не были превышены, заводские сдаточные нормы на излучение делают более жесткими. Так, в Японии допускается увеличение излучения от заводских норм до эксплуатационных при количестве открываний более 100 тыс. раз. Собственно, при таких условиях и проводятся периодические заводские испытания защитных устройств.
В результате анализа работы получили, что передающая антенна - это объект повышенной опасности по СВЧ, поэтому особое внимание уделяется защите от просачивания СВЧ в места нахождения людей. При соблюдении надлежащих мер безопасности можно добиться уменьшения влияния излучения на организм человека, тем самым уменьшить риск заболевания от воздействия СВЧ.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Воскресенский Д.И., Максимов В.М. Развитие антенных систем. //Изв. Вузов СССР. Сер. Радиоэлектроника. - 1987. №2. – с. 4-15.
2. Даджон Д.Э. Основы цифровой обработки сигналов в решетках. // ТИИЭР. 1977. – Т.65, №6. – с. 99-106.
3. Бахтиров Г.Д. Тищенко А.Ю. Реализация устройств цифровой обработки на основе алгоритма БПФ. // Зарубежная радиоэлектроника.- 1975. - №9. - с.71-98.
4. Журавлев А.К., Лукошкин А.П., Поддубный С.С. Обработка сигналов в адаптивных антенных решетках. –Л.: Изд. ЛГУ, 1983. – 239 с.
5. Царьков М.Н. Многоканальные радиолокационные измерители. – М.: Сов. Радио, 1980. – 185с.
6. Джонсон Д.Х. Применение методов спектрального оценивания к задачам определения угловых координат источников излучения. // ТИИЭР. – 1982. – Т. 70, №9. – с. 126-139.
7. Диналевский Л.Н., Доманов Ю.А., Зеленко В.Н., Изох В.В., Коробко О.В. Оптимизация антенных решеток с аналоговым-цифровым преобразованием входных сигналов. // Вестник Белорусского гос. ун-та. – 1980. - №2. – с. 19-22.
8. Антенны и устройства СВЧ (проектирование фазированных антенных решеток)/ Под ред. Д.И. Воскресенского: - М.: Радио и связь, 1981. – 430 с.
Похожие рефераты:
Энергетика СВЧ в народном хозяйстве: применение СВЧ-нагрева в пищевой промышленности
Радиолокационный приемник сантиметрового диапазона
Устройства генерирования и канализации субмиллиметровых волн
Расчет линии связи для системы телевидения
Схема и конструкция монитора на основе электронно-лучевой трубки VIEWSONIC 17GA/GL
Электронные схемы для дома и быта
Океан в капле воды, или Вся техника в одной стекляшке
Радиолокационные системы и средства помехозащиты
Средства постановки помех и помехозащиты РЛС
Использование ЛЧМ сигналов при построении приемника радиолокационной станции сопровождения
Общие сведения об изделии 9С467-2 и сопряженных с ним РЛС и средств АСУ