| Похожие рефераты | Скачать .docx |
Реферат: Проектирование устройства преобразования сигналов
АЛМАТИНСКИЙ ИНСТИТУТ
ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра АЭС
КУРСОВАЯ РАБОТА
По курсу: «Передача дискретных сигналов»
«Проектирование устройств преобразование сигналов»
Выполнил:
Принял:
Алматы 1999
Содержание
1. Введение.
2. Техническое задание на проектирование УПС.
Исходные данные.
3. Теоретическая часть:
1.Системы передачи с обратной связью.
2. Интерфейс RST-232-E
3. Системы синхронизации
4.Системы с РОС
5.Основные параметры систем с обратной связью
6.Сравнение систем с информационной
обратной связью и решающей обратной связью
7.Проектирование УПС
![]() 8.Модем на 1200/600 бит/с
8.Модем на 1200/600 бит/с
4. Заключение
5. Список использованной литературы
Введение
Задачей курсового проектирования является создание теоретически и технически обоснованной схемы аппаратуры передачи данных по телефонным каналам, удовлетворяющей рекомендациям МККТТ.В системе ПДС аппаратура УПС выполняет функцию трансформации информационной двоичной последовательности в сигнал, удобный для передачи по линии и обратного преобразования. Для этого в составе УПС имеется модем использующий методы модуляции, скорость передачи и преобразования регламентированные стандартами МККТТ. Основным требованием к параметрам модема является обеспечение максимально возможной скорости преобразования и передачи при сохранении достаточно малой вероятности ошибки в элементах.
Полосовые фильтры в составе УПС необходимы для выделения информационной составляющей в спектре сигнала на передаче и из смеси сигнала с шумом при приеме. При использовании ЧМ фильтр играет также роль детектора и разделителя несущих частот. Основное требование к фильтру - обеспечение достаточного затухания вне полосы пропускания с максимальной крутизной спада границ.Кроме того в составе УПС имеется устройство синхронизации необходимое для согласования по времени всех операций преобразования. Требование к нему - обеспечение высокой стабильности генератора синхроимпульсов и делителей частоты.
При проектировании УПС требуется также обеспечить наиболее эффективное использование каналов связи и минимизировать аппаратурные затраты. В схеме желательно использовать стандартные компоненты и схемотехнические решения. Все задаваемые допуски.
Техническое задание на проектирование УПС
В процессе проектирования необходимо выполнить следующее:
1) провести сравнительный анализ систем передачи дискретной информации с решающей (РОС) и информационной обратной связью (ИОС), способов синхронизации (групповая, цикловая и тактовая). Анализ должен быть иллюстрирован алгоритмами, структурными схемами и временными диаграммами;
2) провести сравнительный анализ характеристик возможных вариантов систем передачи дискретной информации, удовлетворяющих заданным требованиям;
3) выбрать вариант, обеспечивающий передачу заданного объема информации за сеанс связи при наиболее эффективном использовании канала связи и минимальных аппаратурных затратах, определяемых числом корпусов интегральных микросхем, необходимых для реализации проектируемого устройства;
4) разработать структурную схему системы;
5) рассчитать основные параметры аппаратуры;
6) разработать функциональную схему устройства и построить временные диаграммы его работы в различных режимах;
Данные для расчета УПС :
1. Объем передаваемой информации за сеанс связи, I п =260 кбит.
2. Время передачи, Tcc =8 мин
3. Остаточное затухание канала, a ост =10 дБ.
4. Эффективн. значение напряжения помехи в полосе 3,1кГц, U пэф =2,2мВ.
5. Время поддержания синхронизма, t =0,5 с.
6. Интенсивность перерывов δ пр =0,15
7. Время синхронизации, t c = 8 c
8. Неравномерность характеристики ГВП, t ср.доп =2,2 мс.
9. Способ фазирования циклов - стартстопный
10. Вероятность ложного запуска, не более 3х10-5
11. Средняя длительность перерыва в долях от t 0, t пр =2 0 мкс.
1.Системы передачи с обратной связью
Передатчик с приёмником соединены прямым и обратным каналами связи и передатчик при вводе избыточности использует информацию о состоянии прямого канала, получаемую по каналу обратной связи (ОС).
Классифицируются системы с обратной связью по следующим признакам.
По назначению канала ОС различают:
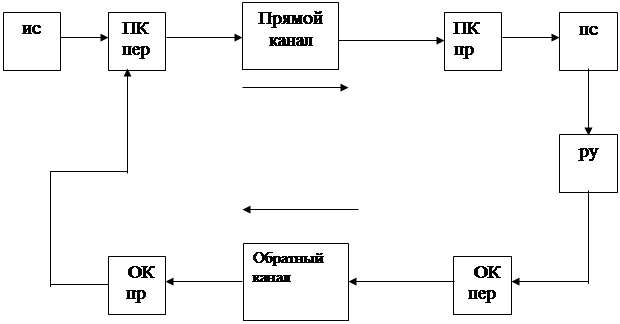
1.1.Системы с решающей ОС (рис.1А) в которых приёмник по сигналу, соответствующему комбинации из n элементов, принимает окончательное решение на выдачу комбинации в приёмник информации ПИ или на ее стирание и переспрос. Формируемый в приемнике сигнал подтверждения приема комбинации или сигнал переспроса передается по каналу ОС в передатчик системы. В зависимости от этого сигнала передатчик или передает новую комбинацию, полученную от датчика информации ДИ, или повторяет ранее переданную. Следовательно, основной особенностью систем РОС, является то, что в них активная роль принадлежит приемнику, а передатчик лишь употребляется приемником с помощью сигналов, передаваемых по каналу ОС. Канал ОС используется в этих системах для передачи решений, принимаемых приемником по комбинациям, поэтому такая ОС и была названа решающей.
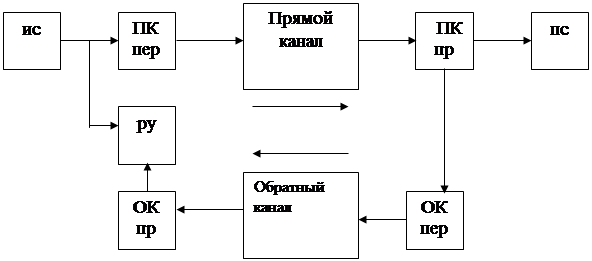
1.2.Системы с информационной ОС (рис.1Б), в которых канал ОС используется для передачи информации о принятой комбинации или о состоянии канала связи. Информация анализируется передатчиком и по результатам анализа принимается решение на повторение ранее переданных комбинаций, получаемых от ДИ. После этого передатчик передает служебные сигналы о принятом решении, а затем кодовые комбинации.
 |
А)
 |
Б)
Рис 1. 1.Структурные схемы системы ПД с ОС
А) – с РОС; Б) – с ИОС; ПКпер – передатчик прямого канала; ПКпр – приемник прямого канала; ОКпер – передатчик обратного канала; ОКпер – приемник обратного канала; РУ – решающее устройство.
1.3.Системы с комбинированной ОС , в которых решение о повторной передаче или выдаче комбинации в ПИ может приниматься и в приемнике и в передатчике системы, а канал ОС используется как для передачи решений, принятых приемником системы, так и для передачи информации о принятой информации или состоянии канала связи.
Системы с ОС также делятся на системы с ограниченным числом повторений и с неограниченным числом повторений.
Системы с ОС, в которых используется информация, содержащаяся в забракованных комбинациях, называются системами с памятью. Если же забракованные комбинации отбрасываются, то системы называются системами без памяти.
В зависимости от способа передачи сигнала ОС различают:
1.Системы со специальным обратным каналом.
2.Системы, в которых обратный канал выделяется методами частотного разделения.
3.Системы, в которых обратный канал выделяется методами временного уплотнения.
4.Системы со структурным разделением, в которых для передачи сигнала ОС используется специальная кодовая комбинация. В приемнике любая разрешенная комбинация (кроме выделенной для сигнала ОС) дешифруется как сигнал подтверждения, а любая неразрешенная комбинация - как сигнал переспроса.
5.Системы со структурно - временным методом разделения, в которых для передачи сигналов ОС выделяются специальные разряды среди не избыточных элементов комбинации корректирующего кода и одновременно любая неразрешенная комбинация, воспринимается приемником как сигнал переспроса.
По типу дискретных каналов различают системы, предназначенные для работы по симплексным каналам, и системы, работающие по дуплексным каналам.
Обратной связью могут быть охвачены различные части системы (рис.2):
1. канал связи, при этом по каналу ОС передаются сведения о принимаемом сигнале до принятия какого-либо решения
2. дискретный канал, при этом по каналу ОС передаются решения, принятые первой решающей схемой РС1 на основе анализа единичных элементов сигнала
3. канал передачи данных, при этом по каналу ОС передаются решения, принятые второй решающей схем РС2 на основе анализа кодовых комбинаций.
В первом случае для контроля канала связи используются устройства типа детектора качества, которые анализируют те или иные параметры принимаемого сигнала (амплитуду, частоту, длительность) или уровень помех. При этом по каналу ОС могут передаваться команды на изменения параметров передаваемых сигналов: мощности, спектрального состава, темпа передачи, избыточности кода и т.п. На передающей стороне должны быть предусмотрены соответствующие органы воздействия на источники сигналов: регуляторы мощности, корректоры, кодопреобразователи, управляемыми сигналами, поступающими по каналам ОС.
Во втором случае в качестве анализатора в качестве анализатором служит обычно детектор качества, контролирующий амплитуду, или краевые искажения сигнала после демодуляции, или и то, и другое.
В третьем случае анализатором служит сам декодер канала, принимающий решение о наличии или отсутствии ошибок в принятых кодовых комбинациях.
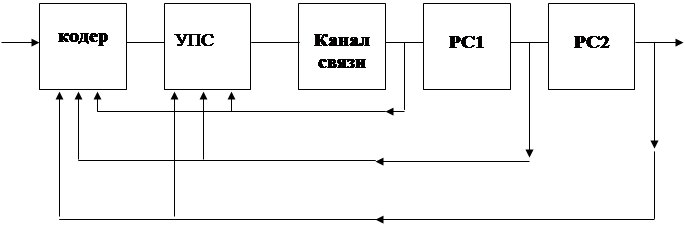
Рис. 1.2 .Анализ кодовой комбинации
2.ИНТЕРФЕЙС. СТАНДАРТ RS-232-E
В 1969 году група промышленных корпораций США на основании рекомендаций EIA разработала вариант С своего стандарта RS-232. Модификация D этого стандарта введена в 1987 году и, наконец, в 1991-м была выпущена последняя модификация 232-Е которая используется и поныне. Существует аналог данного стандарта - это партоколы МККТТ V.24 и V.28.
Стандарт предназначен для регламентирования связи между оконечным оборудованием связи ( ООД )( терминал ) и оконечным оборудованием линии ( ООЛ )( модем ) при обмене двоичной информацией в последовательной форме.
перегрузки; Места соединения оборудования называются цепями стыка. Существует 4 разновидности стыков :
С1 - канальный, находится на выходе передатчика и на входе приемника, регламентирует входное и выходное сопротивлние, регулирует уровень сигнала и устанавливает его допустимое значение;
С2 - преобразования, находится между ООД и ООЛ и представляет собой 25- или 26-проводную шину в которой ООД использует розеточную, а ООЛ - вилочную часть разъема, служит для обмена данными и синхронизации ООД и ООЛ;
С3 - защитный, между ООЛ и устройством защиты от
С4 - мультиплексирования, между ООЛ и мультиплексным коммутатором.
Стандарт МККТТ V.24 содержит функциональные определения сигналов интерфейса, а V.28 - электрические характеристики интерфейса.

Рис .2. Цепи стыка
Интерфейс RS-232 основан на биполярной логике. Первое сстояние "метка" реализуется при действии на линии напряжения -3 - -15 В, а второе +3 - +15 В. Интервал -3 - +3 В - переходная зона неопределенности. Приемник и передатчик без повреждений выдерживают диапазон +25 - -25 В.
2.1.Сигналы интерфейса. Назначение
Все сигналы делятся на 4 группы : данные ( представляют собой последовательность импульсов,с частотой равной скорости передачи ) , управления ( два уровня : сигнальный и нулевой ), синхронизация
( последовательность коротких импульсов с частотой передачи ) и земля.
1) Земля ( AB-102 ) - общий провод для всех электрических цепей,присоединяется к корпусу;
2) Передаваемые данные ( BA-103 ) - информационные сигналы,вырабатываемые локальным ООД для передачи локальному ООЛ;
3) Принимаемые данные ( BB-104 ) - информационные сигналы, вырабатываемые локальным ООЛ для передачилокальному ООД;
4) Запрос передатчика ( CA-105 ) - вырабатывается ООД, обеспечиваетвактивном состоянии удержание ООЛ в режиме передачи;
5) Сброс передатчика ( CB-106 ) - вырабатывается ООЛ, запрашивает
о готовности ООЛ устройства принимать данныеот ООД;
6) Готовность ООД ( CD-108 ) - вырабатывается ООД, готовит ООЛ
соединению с каналом связи;
7) Готовность ООЛ ( CC-107 ) - вырабатывается ООЛ, сигнал
готовности ООЛ к работе с ООД;
8) Указатель вызовов ( CE-125 ) - ООЛ сообщает о приеме сигналов
вызова по каналу;
9) Указатель сигнала по линии приема ( CF-109 ) - ООЛ указывает о
возможности установления подходящей связи;
10) Указатель качества связи ( CG-110 ) - использовать нерекомендуется;
11) ООД переключения скорости передачи ( CH-111 ) - сигнализирует
ООД об одной из 2-х возможных скоростей передачи для ООЛ;
12) ООЛ переключения скоростей передачи ( CI-112 ) - выбор ООЛ
одной из скоростей передачи;
13) Готовность к приему данных ( CJ-133 ) - 00Д активизирует сигнал
сообщения ООЛ о готовности к приему данных;
14) Петлевая конфигурация локальной ООЛ ( LL-141 ) – ООД переводит ООЛ в режим петлевого тестирования;
15) Петлевая конфигурация удаленной ООЛ ( RL-140 ) – ООД переводит удаленную ООЛ в режим дистанционного тестирования;
16) Режим тестирования ( TH-142 ) - ООЛ сообщает ООД о переходе в режим тестирования;
17) ООД - синхронизация передатчика ( DA-113 ) – ООД вырабатывает сигналы для обеспечения синхронизации ООЛ при передаче;
18) ООЛ - синхронизация передатчика ( DB-114 ) – ООЛ обеспечивает синхронизацию ООД при передаче;
19) ООЛ - синхронизация приемника ( DD-115 ) - ООЛ обеспечивает синхронизацию ООД при приеме;
20) Передаваемые данные (дополнительный канал ) ( SBA-116 ) – ООД посылает данные к ООЛ для передачи по дополнительному каналу;
21) Принимаемые данные ( SBB-119 ) - ООЛ передает данные для ООД по дополнительному каналу;
22) Запрос передатчика ( SCA-120 ) - ООД устанавливает ООЛ в режим пердачи по дополнительному каналу;
23) Сброс передатчика ( SCB-121 ) - ООЛ подтверждает возможность работы с дополнительным каналом;
24) Указатель сигнала на линии приема ( SCF-122 ) – ООЛ информирует ООД о приеме несщей ( сигнала ), по дополнительному каналу.
2.2.Полудуплексный режим
В полудуплексном режиме АПД попеременно работает на передачу и на прием .Изменение направления передачи осуществляется тем ООД, которое распознает конец принятого сообщения. Конец может быть выявлен по принятой последовательности битов (после чего ООД на передающей стороне переводит цепь 105 в состояние «выключено» и в АПД выключается передатчик) или по снижению уровня приема ниже установленного минимального значения. В обоих случаях ООД на приемной стороне должно ожидать перехода цепи 109 в состояние «выключено». Такой переход происходит после упомянутого снижения уровня приема не сразу ,а лишь через определенное время последействия ( t посл на рис.),превышающее длительность перерывов , которые возможны в канале связи . только когда зафиксировано состояние «выключено» цепи 109,ООД оконечной установки , работавшей ранее на прием ,переключается на передачу ,переводя цепь 105 в состояние «включено». Передача данных начинается после того ,как АПД посредством перевода цепи 106 в состояние «включено» откроет соединительный тракт. До тех пор ,пока цепь 105 находится в состоянии «включено»,цепь приема данных 104 работающей на передачу установки для защиты от ложных изменений состояния должна находиться в состоянии «1». Установка 1 – передающая Установка 1 - приемная
![]()
![]()
![]() Установка 2 – приемная Установка 2 - передающая
Установка 2 – приемная Установка 2 - передающая




 Вкл Цепь№
Вкл Цепь№

 Выкл 105
Выкл 105

 Вкл
Вкл


 Выкл
t
з
106
Выкл
t
з
106


 Вкл 109
Вкл 109
Выкл t сраб


 0 103
0 103

 1
1
 0 104
0 104
 1 Время
1 Время
 Вкл 105
Вкл 105


 Выкл
Выкл
 Вкл 106
Вкл 106


 Выкл
t
з
Выкл
t
з

 Вкл
t
сраб
t
посл
109
Вкл
t
сраб
t
посл
109
 Выкл
Выкл
 0 103
0 103
1
![]()
![]() 0
104
0
104
1
Рис. 3. Последовательности сигналов на стыке между АПД и ООД при работе в полудуплексном режиме и изменении направления передачи: t с раб – время срабатывания цепи 109; t посл – время последействия цепи 109; t з - время задержки между переходами в состояние «включено» цепей 105 и 106
По окончании переданного сообщения ООД переводит цепь 105 в состояние «выключено». С появлением состояния «выключено»цепи 106 АПД прекращает дальнейшую передачу данных . работавшая ранее на передачу АЛД не сразу готова к приему : вначале может оказаться необходимым сохранение в течение некоторого времени в ее передатчике блокировки цепи 104 для защиты от ошибок, вызванных эхом в линии связи . затем в течение времени задержки ,предусмотренного для цепи 109 , определяется очередное значение уровня приема ; в синхронном режиме , кроме того ,синхронизируется АПД, а при наличии в системе адаптивного корректора производится его настройка.
3.Системы синхронизации
Синхронизация есть процесс установления и поддержания синхронного состояния между двумя и более процессами (т.е. соответствующие события в них должны происходить одновременно). Различают три вида синхронизации поэлементную, групповую и цикловую. В соответствии с Госстандартом поэлементная, групповая и цикловая синхронизация – это синхронизация переданного и принятого цифровых сигналов данных, при которой устанавливаются и поддерживаются требуемые фазовые соотношения между значащими моментами переданных и принятых соответственно единичных элементов сигналов, групп единичных элементов этих сигналов и циклов их временного объединения. Поэлементная синхронизация –это установление соответствия между значащими моментами единичных элементов на передаче и на приёме. Групповая синхронизация обеспечивает правильное разделение принятой последовательности на кодовые комбинации, а цикловая синхронизация – правильное разделение циклов временного объединения элементов на приёме.
3.1.Методы и устройства поэлементной синхронизации
К устройствам поэлементной синхронизации предъявляются следующие требования:
1. Высокая точность синхронизации. Допустимое относительное отклонение синхроимпульсов от моментов, соответствующих идеальной синхронизации, e доп = ± 3%.
2. Малое время вхождения в синхронизм, как при первоначальном включении, так и после прерывания связи.
3. Сохранение синхронизма при наличии помех и кратковременных прерываний связи.
4. Независимость точности синхронизации от статической структуры передаваемого сообщения.
Классификация методов поэлементной синхронизации
Поэлементная синхронизация может быть обеспечена за счёт использования автономного источника – хранителя эталона времени и методов вынужденной синхронизации. Первый способ применяется в тех случаях, когда длительность связи, включая время вхождения в связь, не превышает время сохранения синхронизации. В качестве автономного источника можно использовать местный генератор с высокой стабильностью.
Методы вынужденной синхронизации могут быть основаны на использовании отдельного канала (по которому передаются импульсы, необходимые для подстройки местного генератора) или рабочей (информационной) последовательности. Использование первого метода снижает пропускную способность рабочего канала за счёт выделения дополнительного синхроканала. Поэтому на практике чаще всего используется второй метод.
По способу формирования тактовых импульсов устройства синхронизации с вынужденной синхронизацией подразделяются на разомкнутые (без обратной связи) и замкнутые (с обратной связью).
Разомкнутые устройства поэлементной синхронизации
В разомкнутых (резонансных) устройствах синхронизации синхросигналы (тактовые импульсы) выделяются непосредственно из информационной последовательности элементов.
Формирование синхроимпульсов обеспечивается на основе выделения из принятой последовательности элементов сигнала с частотой f = 1 / t 0 элементов с помощью высокоизбирательных резонансных контуров с частотой настройки 2fт = 1/ t 0 . Для формирования частоты 2fт используют нелинейные преобразователи сигнала. К достоинствам резонансных систем следует отнести простоту реализации, к недостаткам – сильную зависимость точности синхронизации от статической структуры текста и искажений единичных элементов; нарушение синхронизма при кратковременных перерывах связи.
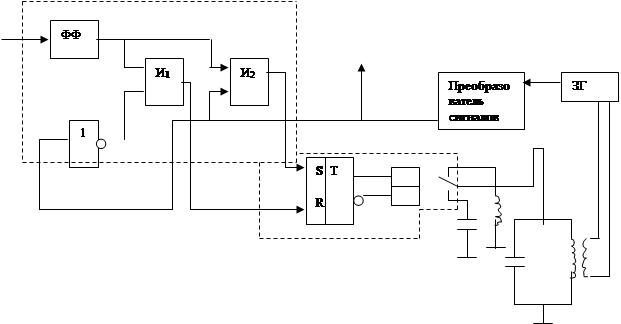
3.2.Разомкнутые устройства поэлементной синхронизации
В разомкнутых (резонансных) устройствах синхронизации синхросигналы (тактовые импульсы) выделяются непосредственно из информационной последовательности элементов.
 |
Рис.3.2. Структурная схема резонансного устройства поэлементной синхронизации
Формирование синхроимпульсов обеспечивается на основе выделения из принятой последовательности элементов сигнала с частотой f = 1 / t0 элементов с помощью высокоизбирательных резонансных контуров с частотой настройки 2fт = 1/ t0 . Для формирования частоты 2fт используют нелинейные преобразователи сигнала. К достоинствам резонансных систем следует отнести простоту реализации, к недостаткам – сильную зависимость точности синхронизации от статической структуры текста и искажений единичных элементов; нарушение синхронизма при кратковременных перерывах связи.
3.3.Замкнутые устройства поэлементной синхронизации
Замкнутые устройства синхронизации широко используются в низко – и среднескоростных системах связи.Замкнутые устройства синхронизации разделяются на два подкласса: с непосредственным воздействием на задающий генератор синхроимпульсов и с косвенным воздействием.
Устройства синхронизации с непосредственным воздействием на частоту генераторов по способу управления делятся на две группы:
1) устройства с дискретным (релейным) управлением, в которых управляющее устройство дискретно изменяет управляющий сигнал время от времени. В интервалах между подстройками управляющий сигнал остаётся постоянным и зависит от величины расхождения по фазе;
2) устройства с непрерывным (плавным) управлением, в которых управляющее устройство непрерывно воздействует на генератор синхроимпульсов, а
управляющий сигнал пропорционален величине расхождения фаз.
 |
ТИ
L1
С1 L0
C0
Рис. 3.3. Структурная схема устройства синхронизации с дискретным управлением
Особенность устройства синхронизации с непрерывным (плавным) воздействием на генератор синхроимпульсов состоит в том, что зависимость изменения частоты от расхождения фаз во времени будет иметь плавный характер. Для управления частотой генератора используют управляемый реактивный элемент (варикап). Благодаря плавному изменению частоты и фазы можно добиться более высокой точности поддержания синфазности, чем при дискретном управлении.
Достоинством таких устройств синхронизации является относительная простота реализации, особенно на высоких скоростях работы. К недостаткам следует отнести: небольшую точность синхронизации; трудность обеспечения высокой стабильности вследствие паразитных ёмкостей, возникающих за счёт подключения к контуру генератора реактивного элемента; выход из синхронизма системы при перерыве связи.
В устройствах синхронизации с косвенным управлением фаза подстраивается в промежуточном преобразователе ПП (рис. 1.4), через который проходят импульсы от задающего генератора.
 ТИ
ТИ
Рис. 3.3.1. Структурная схема устройства синхронизации с косвенным управлением частоты генератора
Устройства синхронизации без непосредственного воздействия делятся на два вида:
1) устройства, в которых промежуточное устройство представляет собой делитель частоты с переменным коэффициентом деления частоты;
2) устройства, в которых в процессе корректировки фазы производится добавление или вычитание импульсов на выходе делителя частоты.
ТИ

Опережает
Отстаёт
Рис.3.3.2 Структурная схема устройства синхронизации, использующего делитель частоты с переменным коэффициентом деления
На рис.3.3.2. приведена структурная схема устройства синхронизации, использующего делитель частоты с переменным коэффициентом деления. В процессе корректирования фазы возможны только два состояния устройства: первое, когда ТИ приёмника смещены вправо относительно ЗМ, т.е. приёмник «отстаёт»; второе, когда ТИ смещены влево относительно поступающих ЗМ, т.е. приёмник «спешит». Рассмотренное устройство синхронизации можно отнести к устройствам с двухпозиционным управлением.
Устройства синхронизация без непосредственного воздействия на генератор с добавлением и вычитанием импульсов на входе частоты относят к трёхпозиционным (рис.3.3.3.). Здесь возможны три случая: импульсы от генератора без изменения проходят на вход делителя частоты ДЧ; к последовательности импульсов, поступающих от генератора ,добавляется один импульс; то же, исключается один импульс.
 |
ФД
ТИ
Рис.3.3.3. Структурная схема устройства синхронизации с добавлением и вычитанием импульсов на входе делителя частоты
3.4.Методы групповой синхронизации
Этот вид синхронизации имеет исключительно значение, так как нарушение синхронизма приводит к неправильному декодированию кодовых комбинаций.
В случаях передачи информации в течение сравнительно короткого времени и при использовании равномерного кодирования, для обеспечения групповой синхронизации достаточно определить начало сеанса связи и послать сигнал пуска (стартовый сигнал) перед передачей информации в канал связи. Такой метод одноразовой передачи синхронизирующей информации называют безмаркерным методом групповой синхронизации. Метод, при котором специальные сигналы, позволяющие отделить одну кодовую комбинацию от другой, посылаются в течение всего сеанса связи, называется маркерным.
Безмаркерный метод групповой синхронизации можно использовать только при синхронном способе передачи.
 |
а)
 |
t Ф t Ф
б)
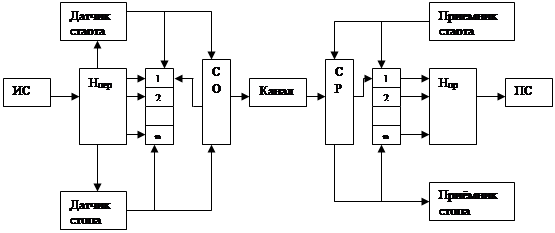
Рис. 3.3.4. Схема организации связи при безмаркерном методе групповой синхронизации (а) и временная диаграмма работы устройства синхронизации (б)
Недостатки безмаркерного метода: необходимость прекращения передачи информации после любого нарушения группой синхронизации; отсутствие постоянного контроля синхронизма приёмника относительно передатчика; необходимость наличия обратного канала для передачи информации о рассинхронизации приёмника. Преимущество безмаркерного метода состоит в том, что фазирование осуществляется без существенного снижения скорости передачи информации.
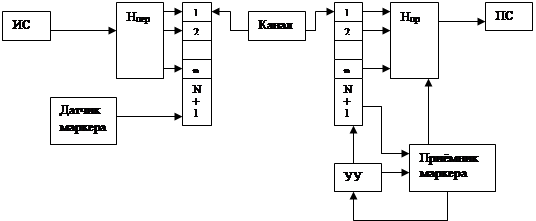
Маркерный метод можно использовать как при синхронном, так и при стартстопном методах передачи. На рис.3.3.5.,а приведена структурная схема синхронной системы, использующей маркерный метод групповой синхронизации, а на рис. 3.3.6.,б представлена его временная диаграмма.
а)
 |
Время цикла
б)
Рис.3.3.7. Схема организации связи в синхронной системе, использующей маркерный метод групповой синхронизации (а) и временная диаграмма работы устройства синхронизации (б)
Алгоритм работы устройства состоит в следующем. От источника сообщение поступает на накопитель и с помощью щетки распределителя считывается n элементов в канал связи. На ( n + 1) –м такте считываются элементы маркера, поступающие от датчика маркера. В данном случае за цикл передачи считывается один элемент маркера, который находится в конце кодовой комбинации. На приёме кодовая комбинация с помощью щетки распределителя приёмника записывается элемент за элементом на Нпр . К ( n+1) – му выходу распределителя подключён приёмник маркера, выход которого соединён с управляющим устройством УУ. При расхождении распределителей по фазе маркер не поступает на приёмник маркера и УУ смещает щетку распределителя приёма на один шаг. Синхронизм в такой системе контролируется на протяжении всего сеанса работы, так как в каждом цикле передачи имеется элемент маркера.
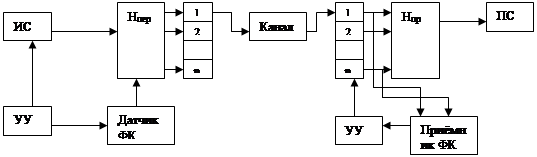
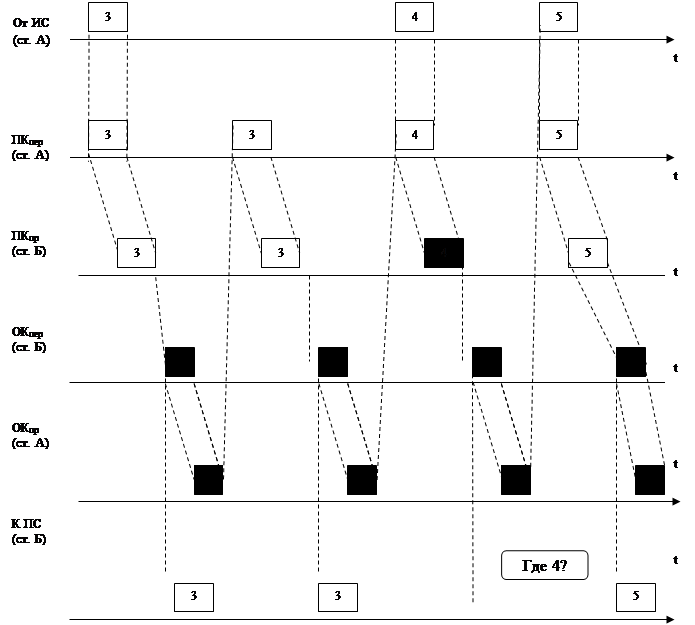
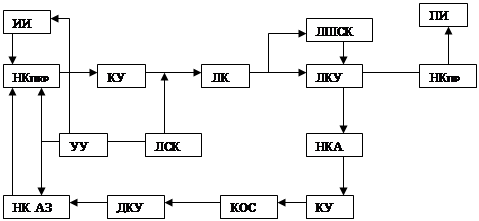
На рис.3.3.8. приведены структурная схема и временная диаграмма стартстопной системы, которая относится к системам с маркерным методом групповой синхронизации.
 |
а)
 |
Время цикла
![]() б)
б)
Рис. 3.3.8. Схема организации связи в стартстопной системе, использующей маркерный метод групповой синхронизации (а) и временная диаграмма работы устройства синхронизации (б)
Отличительной особенностью данной схемы по отношению к синхронной является то, что маркер представляет собой совокупность двух элементов: элемента «Старт», с которого начинается каждая стартстопная кодовая комбинация, и элемента «Стоп», которым кодовая комбинация заканчивается.
Преимуществом маркерного метода групповой синхронизации состоит в том, что при передаче информации осуществляется постоянный контроль за синхронизмом передатчика и приёмника. Недостатком маркерного метода является большее, чем при безмаркерном снижение информационной скорости передачи информации.
3.5.Система тактовой синхронизации
Для приема синхронных цифровых потоков передаваемых по каналам связи тем или иным методом манипуляции необходима надежная тактовая синхронизация. Система тактовой синхронизации должна обеспечивать жесткую «привязку» фронтов тактовых импульсов к принимаемой информационной последовательности (а именно, к середине тактовых интервалов) даже при наличии в ней достаточно длинных серий единиц и нулей.
При необходимости требуемая форма колебания достигается подбором постоянной времени времязадающих цепей одновибраторов.
На этом настройка системы заканчивается. Остается лишь проверить наличие в ней синхронизма. Для этого потребуется двухлучевой осциллограф.
4 . Системы РОС
4.1.Системы с ожиданием сигнала ОС (РОС-ОЖ)
Системами передачи дискретной информации с ОС называют системы, в которых ли повторение ранее переданной происходит лишь после приема сигнала ОС. Во втором варианте (РОС-ОЖ) сразу производится i-кратная передача комбинации, а передача следующей комбинации или (i+1)-я передача ранее переданной осуществляется после приема соответствующего сигнала ОС.
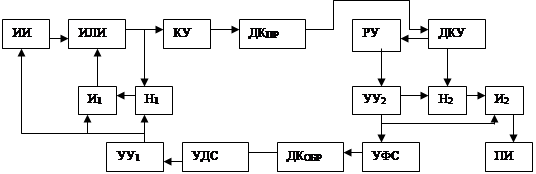
Рис4.1. Структурная схема системы с РОС – ож
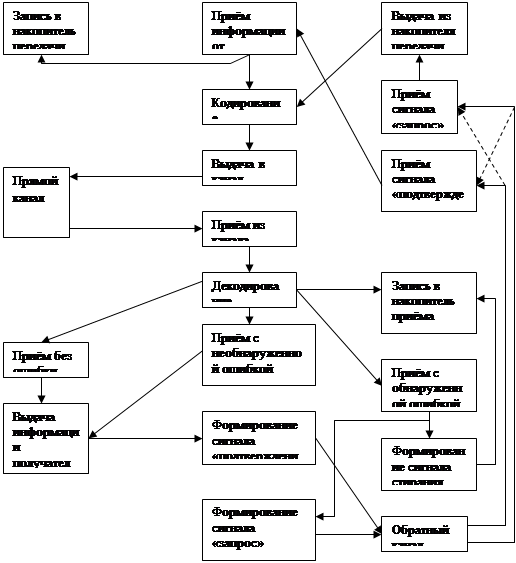 |
Рис.4.1.1. Структурная схема алгоритма системы с РОС-ож
 |
||||||||
|
||||||||
|
||||||||
Рис. 4.1.2. Появление сдвига при работе систем ПД с РОС – ОЖ
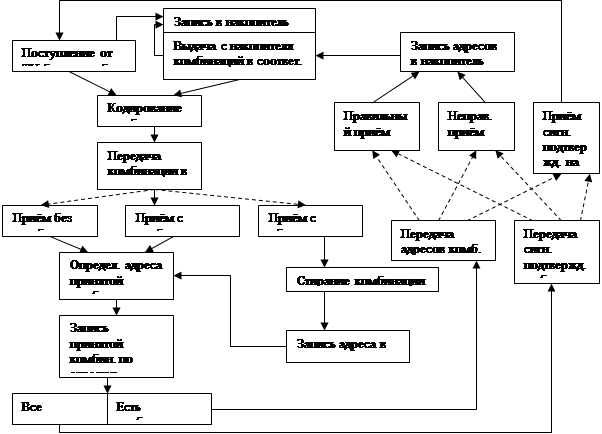
4.2. Системы с накоплением правильно принятых комбинаций (РОС-НК)
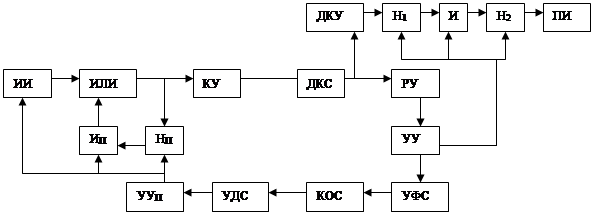 |
Рис.4.2.1. Структурная схема системы с РОС-нк
В этих системах h комбинаций корректирующего кода объединены в подблок, а i таких одинаковых подблоков составляют единый блок, передаваемый одновременно передатчиком системы. Следовательно, каждая комбинация передается i раз с разносом во времени, определяемым числом h. В приемнике системы
 |
Рис. 4.2.2.Алгоритм системы с РОС-нк
правильно принятые комбинации накапливаются в накопителе и, если после приема блока хотя бы одна из h комбинаций не будет принята, то формируется сигнал переспроса, единый на весь блок. Повторяется снова весь блок, а в приемнике системы из блока отбираются комбинации, не принятые при первой передаче. Переспросы производятся до тех пор, пока не будет приняты все комбинации блока.
После приема всех h комбинаций посылается сигнал подтверждения. Получив его, передатчик передает следующий блок комбинаций.
4.3.Системы с адресным переспросом (РОС-АП)
 Эти системы во многом аналогичны системам с накоплением, но в отличие от последних приемник их формирует и передает сложный сигнал переспроса, в котором
Эти системы во многом аналогичны системам с накоплением, но в отличие от последних приемник их формирует и передает сложный сигнал переспроса, в котором
указываются условные номера (адреса) не принятых приемником комбинаций блока. В соответствии с этим сигналом передатчик повторяет не весь блок, как в системе с накоплением, а лишь не принятые комбинации.
Рис. 4.3. Структурная схема РОС-ап Рис. 4.3.1. Алгоритм работы системы с РОС-ап
4.4.Системы с последовательной передачей кодовых комбинаций (РОС-ПП)
Данные системы характеризуются тем, что их передатчик передает непрерывную последовательность комбинаций, причем очередные комбинации передаются в канал при отсутствии сигналов ОС по h предшествующим комбинациям. Известны различные варианты построения систем РОС-ПП, основными из которых являются:
а) Системы с изменением порядка следования комбинаций (РОС-ПП). В этих системах приемник стирает лишь комбинации, по которым решающим устройством РУ принято решение на стирание, и только по этим комбинациям посылает на передатчик сигналы переспроса. Остальные комбинации выдаются в ПИ по мере их поступления. Передатчик повторяет лишь комбинации, по которым приняты сигналы переспроса, поэтому на приеме порядок следования комбинаций, имевший место на выходе ДИ, будет другим.
б) Системы с восстановлением порядка следования комбинаций (РОС-ПП). От систем РОС-ПП данные системы отличаются лишь тем, что приемник их содержит устройство, восстанавливающее порядок следования комбинаций.
в) Системы с переменным уплотнением (РОС-ПП). Здесь передатчик поочередно передает комбинации из h последовательностей, причем число последних выбирается так, чтобы ко времени передачи комбинаций на передатчике уже был принят сигнал ОС по ранее переданной комбинации этой последовательности. В соответствии с принятым сигналом ОС осуществляется или повторение ранее переданной или передача очередной комбинации под последовательности. Таким образом, порядок следования комбинаций в каждой последовательности сохраняется.
г) Системы с блокировкой приемника на время приема h комбинаций после обнаружения ошибки и повторением или переносом блока из h комбинаций (РОС-ПП). В приемнике после обнаружения ошибки в комбинации осуществляется блокировка выхода на время приема h комбинаций и посылается сигнал переспроса, после которого передатчик повторяет блок из последних переданных комбинаций.
д) Системы с контролем заблокированных комбинаций (РОС-ПП). В отличие от систем РОС-ПП в этих системах после обнаружения ошибки в кодовой комбинации и передачи сигнала переспроса производится контроль на наличие обнаруженных ошибок h -1 комбинаций, следующих за комбинацией с обнаруженной ошибкой.
е) Системы с анализом комбинаций методом скользящего блока (РОС-ПП). Эти системы характеризуются тем, что в них для анализа комбинаций применен метод скользящего блока, при котором в ПИ в том случае, если правильно приняты комбинации блока, состоящего из h комбинаций блока, состоящего из h комбинаций, предшествующих анализируемой, самой анализируемой и h комбинаций, следующим за анализируемой.
4.5.Системы с многоступенчатым переспросом (РОС-МП)
В этих системах предусматривается как переспрос комбинаций, так и переспрос блоков комбинаций, т.е. имеются несколько ступеней переспроса.
4.6.Системы с РОС с непрерывной передачей информации (РОС-нп)
В системах с РОС-нп передатчик передаёт непрерывную последовательность комбинаций, не ожидая получения сигналов подтверждения. Приёмник стирает лишь те комбинации, в которых решающее устройство обнаруживает ошибки, и по ним даёт сигнал переспроса. Остальные комбинации выдаются ПИ (получатель информации) по мере их поступления.
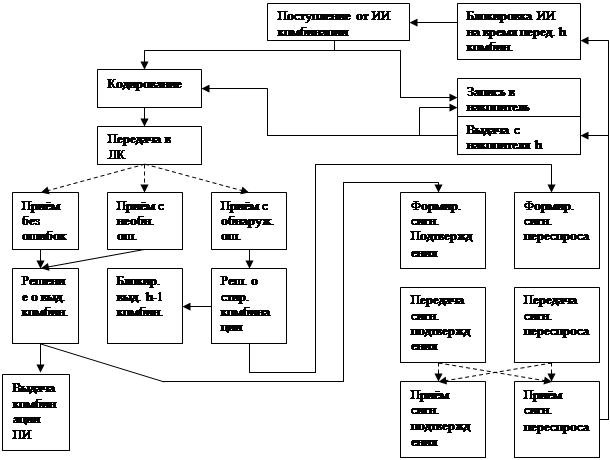
Рис.4.6. Структурная схема алгоритма системы с РОС-нп
5.Основные параметры систем с обратной связью
Для оценки с обратной связью используют следующие параметры:
1.вероятности трансформации переданной k – элементной комбинации в другую комбинацию входного множества Рош с ( k) (вероятность ошибочного приема комбинации) и в сигнал стирания Рст с ( k ). В системах с одинаковыми входными и выходными алфавитами Рстс (к)=0. Вероятность Рошс (к) оценивается достоверность, обеспечиваемая системой с обратной связью.
2. Время задержки, которое в системах с обратной связью является случайной величиной. Поэтому для оценки системы, с точки зрения задержки информации , используют функцию распределения времени задержки Fl (t) , равную вероятности задержки сообщения из l двоичных элементов на время, меньше t , т. е.
Fl (t) = P{t(l)<t} .
3. Скорость передачи. В системах с обратной связью число символов, поступающих на вход системы в единицу времени, меняется в зависимости от состояния канала связи, поэтому различают текущую и среднюю скорости передачи.
Текущая абсолютная скорость передачи R абс т есть отношение числа двоичных символов H(t) , поступивших на вход системы от ДИ за время t , ко времени t :
R абс т = H(t)/t .
Средняя абсолютная скорость передачи R абс есть величина, к которой сходится по вероятности R абс т при достаточно больших t .
Текущая относительная скорость передачи R т есть отношение R абс т к скорости телеграфирования (скорости модуляции ) N в бодах:
R т = R абс т / N = H(t)/Nt .
Средняя относительная скорость передачи R (или просто скорость передачи) есть величина, к которой сходится по вероятности R т при достаточно больших t . Скорость передачи R характеризует эффективность использования системой канала связи прямого направления.
4. Коэффициент использования каналов связи R эфф . Этот параметр необходим для оценки эффективности использования каналов связи как прямого, так и обратного направления. Если информация передается только в одном направлении и N1 – скорость телеграфирования в данном направлении, а N 2 – скорость телеграфирования в канале обратной связи, то
R эфф = R*N1 /N1+ N2 .
если же каналы связи обоих направлений одновременно используются для передачи информации соответственно со скоростями R1 и R2 , то
R’ эфф = ( R1 N1 +R2 N2 )/(N1 +N2 ) .
5. Вероятности вставок и выпадений кодовых комбинаций. Из – за воздействия помех в канале обратной связи сигналы обратной связи могут искажаться. Это приводит к тому, что некоторые комбинации, выданные ДИ, вообще не попадут в ПИ, а некоторые комбинации могут быть выданы в ПИ дважды, трижды, и т. д. Эти события, которые могут иметь место в любой системе с обратной связью, в дальнейшем будем называть выпадениями и вставками комбинации. Они ведут к сдвигам комбинаций в выходной последовательности по отношению к комбинациям входной последовательности. Для потребителей информации эти сдвиги не равноценны ошибкам, связанным с ошибочным приемом двоичных символов. Поэтому вероятности выпадений Рвып и вставок Рвст комбинаций определяется отдельно и являются важными параметрами систем с обратной связью.
6. Сравнение систем с информационной обратной связью и решающей обратной связью
При симметричных и одинаковых по помехоустойчивости прямом и обратном каналах (р = р/ ) с независимыми ошибками системами с ИОС и РОС – 1 обеспечивают равную достоверность передачи сообщений. Это утверждение справедливо при безошибочной либо одинаковой по достоверности передаче служебных знаков. Различие в логике работы систем проявляется в скорости передачи. В большинстве случаев передача служебных знаков (а именно они по прямому канала передаются в системе с ИОС) требуют меньших затрат энергии и времени, чем передача по прямому каналу опознавателей в системе с РОС. Поэтому скорость передачи сообщений в прямом направлении в системе с ИОС больше.
Если помехоустойчивость обратного канала выше помехоустойчивости прямого, то достоверность передачи сообщений в системах с ИОС также выше. В случае полной бесшумной информационной обратной связи можно обеспечить, в принципе, безошибочную передачу сообщений по прямому каналу независимо от уровня помех в нем. Для этого надо дополнительно организовать корректировку искажаемых в прямом канале служебных знаков. Такой результат, в принципе, недостижим в системах с РОС распределенного типа.
В случае группирующихся ошибок существенную роль играют условия, в которых передаются информационная и контрольная части кодовых комбинаций в обеих системах связи. При использовании ИОС часто имеет место единственная декорреляция ошибок в прямом и обратном каналах. Рпи обычной РОС, когда сообщение и опознаватель передаются слитно, такая декорреляция отсутствует. Это вызывает увеличение вероятности не обнаруживаемой ошибки и, как следствие, ухудшение помехозащищенности передачи в системах с РОС.
Важную роль при сравнении передачи сообщений с РОС и ИОС играют также длина используемого кода n и его избыточность s/t . Если избыточность невелика ( s/n<0,3), то даже при бесшумном обратном канале ИОС практически не обеспечивает по достоверности преимущества перед РОС. Однако скорость передачи у систем с ИОС по-прежнему выше.
Следует указать еще одно преимущество систем с ИОС, обусловленное различием в скорости. Каждому заданному значению эквивалентной вероятности ошибки соответствует оптимальная длина кода, при отклонении от которой скорость передачи в системе с РОС уменьшается. В системах с ИОС при s/n>0,3 передачу сообщений выгоднее вести короткими кодами. При заданной наперед достоверности скорость передачи от этого становится больше. Это выгодно с практической точки зрения, т.к осуществлять кодирование и декодирование при коротких кодах легче.
С увеличением избыточности кода преимущество систем с ИОС по достоверности передачи возрастает даже при одинаковых по помехоустойчивости прямом и обратном каналах, особенно если передача сообщений и квитанции в системе с ИОС организована так, что ошибки в них оказываются некорректированными. Энергетический выигрыш в прямом канале системы с ИОС оказывается на порядок выше, чем в системе с РОС.
Таким образом, ИОС во всех случаях обеспечивает равную или более высокую помехозащищенность передачи сообщений по прямому каналу, особенно при больших s и бесшумном обратном канале. ИОС наиболее рационально применять в таких системах, где обратный канал по роду своей загрузки может быть без ущерба для других целей использован для эффективной передачи квитирующей информации. ИОС менее пригодна или неприменима, когда пропускная способность обратного канала значительно ниже пропускной способности прямого канала или она существенно лимитирована.
Исследования показали, что при заданной верности передачи оптимальная длина кода в системах с ИОС несколько меньше, чем в системах с РОС, что удешевляет реализацию устройств кодирования и декодирования. Однако общая сложность реализации систем с ИОС больше, чем систем с РОС. Поэтому системы с РОС нашли более широкое применение. Системы с ИОС применяют в тех случаях, когда обратный канал может быть без ущерба для других целей эффективно использован для передачи квитанций.
7. ПРОЕКТИРОВАНИЕ УПС
1 Рассчитать необходимую скорость передачи данных V исходя из объема передаваемой информации Iп, ориентировочного количества служебных символов Iсл и допустимого времени передачи Тсс.
V=(Iсл + Iп)/Тсс = (1,05 – 1,1) Iп)/Тсс. (1)
V= 1,1*260*10*3/(8*60) = 595,8 ≈600 бод.
На основании рекомендации МККТТ и соответствующих ГОСТов выбираем УПС-1,2 ТЧ/ТФ-ПД, предназначенное для полудуплексной передачи цифровых сигналов по коммутируемой телефонной сети общего пользования со скоростью 1200/600 бит/с. Рекомендации МККТТ V.23 и ГОСТ 20855-83. Передача данных должна осуществляться в одном направлении со скоростью 1200 или 600 бит/с ,при использовании ЧМ синхронным или асинхронным способом. Возможно применение канала ОС с ЧМ и скоростью модуляции 75 бод. Этот дополнительный канал может быть использован для исправления ошибок с РОС. Частота среднего прямого канала 1700 и 1500 Гц соответственно. Девиация частоты для скорости 600 бод-+ - 200 Гц. Нижняя частота 1300 Гц соответствует передачи двоичной «1» и верхняя частота 1700Гц- двоичному «0». Для обратного канала передачи двоичных «1» и «0» характеристические частоты 390 и 450 Гц соответственно. Для характеристических частот допускается отклонение от номинального значения не более чем + - 10 Гц.
2. Длительность единичных элементов :
t о = 1/В = 1/600 =1,7*10 –3 с . (2)
где В – скорость модуляции. Из приложения 1, для данной скорости передач определяем: скорость модуляции В = 600 бит/с.
Несущая частота fн =1500 Гц, девиация частоты (для ЧМ) 200 Гц.
3 Для выбранного метода модуляции рассчитываем полосу пропускания фильтров передачи и приема.
для радиосигналов с двумя боковымя полосами: D Fк = 1,42В;
Ширина полосы пропускания D Fпф фильтров передачи и приема принимается:
D Fпф = D Fк = 1,42*600=852 Гц. (3)
С учетом допуска на временную и температурную нестабильность параметров элементов фильтров, обычно D Fпф принимают несколько большим расчетного значения.
4 Определяем частоты вспомогательного генератора преобразователя и центральных полосовых фильтров. Центральная частота полосового фильтра зависит от частоты модуляции. Частота модуляции должна быть в 5–10 раз выше частоты изменения модулирующего сигнала, т.е.
f1м >(5 – 10)В>8000 Гц (4)
Можно принять f1м=8 кГц, то генератор преобразователя должен иметь частоту:
f2м = f1м – fн = 8 – 1,5 =6,5 кГц (5)
Полоса пропускания фильтра ПФ2 при этом находится в пределах (1,5 ± 1,15) кГц, т.е. от 350 до 2650 Гц. Сдвиг частот генераторов Г1, Г2, Г3 не может превышать при этом ±1 Гц.
5 Определяем частоты приемного преобразователя f3м.
Для уменьшения искажений на приёмной стороне демодуляцию проводят на повышенной частоте. С целью упрощения реализации УПС частоту преобразователя f3м целесообразно принимать:
f3м =f2м=6,2 кГц. (6)
6 На основании скорости модуляции и типа канала выбраем допустимую вероятность ошибочного приема единичных элементов УПС Р0 (приложение 2).
Р = 1*10 -3
Формула для расчета Рош :
Р ош =0,5*(1-Ф(√ h ))
Из таблицы значений функций Крампа Ф(х) (1) находятся отношения эффективных значений напряжений сигнала Uсэф и помехи Uпэф q = Uсэф/Uпэф. С учетом того, что погрешность синхронизации может вызвать дополнительные ошибки, величину q принимают несколько больше расчетной.
7 Определяем эффективное значение помехи на выходе ПФ приемника. За счет фильтрации эффективное значение помехи на выходе ПФ приемника:
![]() (7)
(7)
где Uпэф эффективное значение флуктуационной помехи в полосе канала.
![]() U
пэф
= √(2,2*10 –3
) 2
*855/852 =2,2 мВ
U
пэф
= √(2,2*10 –3
) 2
*855/852 =2,2 мВ
Ф(√ h ) = 1-2Ро = 1-1*10 –3 = 0,999
√ h =3,3 ; h = 10 , 89
![]() h=q√∆Fп
/B
h=q√∆Fп
/B
q=h/√∆Fп /B =9,14
Ucэф = qUпэф = 9,14*2,2=20,1 мВ (8)
Эффективное значение сигнала на входе приёмника
Минимальный уровень сигнала на выходе передатчика (вход канала)
r свых = 20 lg(Ucэф/775). (9)
r свых = 20 lg(20,1/775)= -31,7 дБ
Здесь, 775 мВ, напряжение в точке канала, принятой за исходную.
С учетом затухания канала минимальный уровень сигнала на выходе передающей части (на входе канала) должен быть:
r свх> r свых +аост . (10)
где аост – остаточное затухание канала.
r свх >-31,7+10 = -21,7
При этом, должно выполняться условие r свх< r сдоп. Максимально допустимый уровень сигнала на входе некоммутируемого канала ТЧ, согласно ГОСТ 25007–81, равен – r сдоп = 13дБмО.
8 Вероятность ошибки по элементам за счёт перерывов Роп .
Р0П < r сдоп » 0,5(tпр n пр )/(3600τ0 В)=( ν пр t пр )/7200=(20*10-6 *0,15)/7200=4,16*10-10
где tпр –средняя длительность перерывов при учете прерываний длительности свыше t 0, n пр – интенсивность перерывов (количество перерывов в час), t 0 – длительность единичного интервала.
Максимальная допустимая вероятность ошибки на выходе УПС от воздействия флуктуационных помех:
Р0ф Ј Р0 – Р0п. (12)
Роф >=Рлз
Роф ≈10-5 ≈5*10-5
9 Выбор метода регистрации. Эффективная исправляющая способность приемника m эф = 47% для синхронных систем. Максимально допустимая среднеквадратическая величина краевых искажений d кв , которая:
при интегральном методе регистрации:
Р0доп = 0,5[1 – Ф(z)] + 2Т(z1,m1) – 2N(z,m3). (14)
где T(z,m) – функция Оуэна, Ф(z) – функция Крампа значения которой при различных z и m приведены в [1].
z = μэф – δпр *δкв
z1 = (0,5 – δпр )/( 2δкв ) (15)
m1 = 0,5/(0,5 – 2δпр )
m3 =апр /(0,5 – апр ) (16)
апр =0,01
11 Рассчитаем параметры УСДУ формирования тактовых импульсов.
На основе исправляющей способности m эф вычисляем максимально допустимую погрешность синхронизации εс и определяем коэффициент нестабильности частоты задающего генератора kf , а также коэффициенты деления реверсивного счетчика S, делителя частоты mд и частоту задающего генератора.Допустимая погрешность синхронизации:
адоп = ас = 0,5 – мэф – δпр (19)
где εс – погрешность синхронизации, μэф – эффективная исправляющая способность приёмника при краевых искажениях сигнала, δпр – преобладание приёмника.
адоп = 0,5 - 0,47 = 0,03
Если допустимая величина погрешности синхронизации адоп Ј 0,03, то такая погрешность устройства синхронизации практически не влияет на помехоустойчивость приемника. Тогда допустимую величину коэффициента нестабильности задающих генераторов kf модулятора и демодулятора можно определить из неравенства:
kf Ј e доп /(2Вtпс ). (20)
kf = 0,06/( 2*600*0,5) = 5*10 –4 Гц
Погрешность синхронизации εс включает в себя статическую e ст и динамическую e дин составляющие, причем
e ст + e дин = e доп =0,08-0,022=0,058 (21)
Распределяем погрешность тактовой синхронизации на статическую и динамическую составляющие следующим образом:
e ст = 0,008; e дин = 0,022.
Среднеквадратическая величина краевых искажений тактовой последовательности импульсов:
d
кв
= ![]() В/(q
D
Fпф
). (22)
В/(q
D
Fпф
). (22)
d кв = 1,41*600/(9,14*852) = 0,109
Решая систему уравнений:
![]() e
ст
=1/mд
+ 4kf S,
e
ст
=1/mд
+ 4kf S,
e
дин
= 3 ![]() (23)
(23)
находим S и mд .
S = 8,5
m д =35,3
Частота задающего генератора устройства синхронизации:
f0 = mд fв . (24)
f0 = 35,3*1700=59,9 кГц
Время вхождения в синхронизм:
tвс = Smд /B. (25)
tвс = 8,5*35,3/600 = 0,5 с.
не превышает величину установленную техническим заданием.
12 Определить абсолютную величину смещения пересечения нулевого уровня смеси сигнала с шумом на выходе приемного фильтра.
δкв = 1/ D Fпф . (32)
δкв = 1/852 = 0,00117
Полагая погрешность синхронизации когерентных колебаний e с=2% при рассчитанном среднеквадратическом отклонении фазы колебании от номинального значения d кв = 0,11, распределить e с на статическую и динамическую составляющие:
e ст =0,008, e дин = 0,022. ( e с = e ст + e дин = 0,11+0,12=0,2).
Решая систему уравнений:
![]() e
ст
=1/mд
+ 4kf
S, (34)
e
ст
=1/mд
+ 4kf
S, (34)
e
дин
= 3·![]() (35)
(35)
определяем значения S и mд .
S = 0.097 ; m д = 5,5
В связи с тем, что частота опорных колебаний, подаваемых на фазовый дискриминатор УВКК, при ТОФМ должна быть в 8 раз выше частоты демодулируемых сигналов, частота задающего генератора будет равна:
fо = 8mf fнвч . (36)
13 Время синхронизации опорных колебаний:
tсок =Smf fнвч . (37)
t сок = 8,5*35,3/1300 = 0,23 с.
что меньше установленному техническим заданием.
14 Для определения необходимости коррекции характеристики ГВП канала рассчитать максимально допустимую величину ее неравномерности. Так как характеристики ГВП для канала ТЧ имеет обычно четно-симметричный характер, то:
t ср.доп = 1/В. (38)
t ср.доп = 1/600 = 0,0017 с.
При этом, если полученное значение окажется меньше установленной техническим заданием неравномерности характеристики ГВП, то на входе демодулятора необходимо установить фазовый корректор, который должен снизить неравномерность
группового времени прохождения сигнала менее t ср.доп мкс.
8.МОДЕМ на 1200 / 600 бит/с
При передаче со скоростью, варьируемой в пределах до 1200бит/с , используется большая часть полосы частот канала ТЧ. Поэтому при работе по коммутируемой телефонной сети модем на 1200/600бит/с может передавать данные только в одном направлении. Однако направление передачи можно менять (полудуплексный режим). С помощью стыка 111 можно переключать с 1200 бит/с на 600 бит/с.
8.1.Метод передачи данных по основному каналу. Метод передачи с варьируемой скоростью , а также синхронной передачи со скоростями 1200 бит/с и 600 бит/с установлен рекомендацией МККТТ V.23 . В данном случае используется двоичная частотная модуляция.
При передаче со скоростью до 600 бит/с используют среднюю частоту 1500 Гц и девиацию частоты 200 Гц. Таким образом, для 600 бит/с-1300 и 1700 Гц. При индексе модуляции h=2/3 обеспечивается особенно благоприятная форма кривой спектральной плотности мощности. Для характеристических частот допускается отклонения от требуемых значений не более чем на ±10 Гц. С учетом возможного сдвига частоты до ± 6 Гц в высокочастотном тракте канала связи максимальное отклонение каждого из значений частоты на приеме может достигать ± 16 Гц. Для скоростей до 600 бит/с предусмотрены свои, отдельные характеристические частоты в расчете на такие соединительные тракты, верхняя граничная частота полосы пропускания которых особенно низка, что, например, имеет место при использовании средне- и тяжелопупинизированных кабелей.
8.2.Принцип построения модели. На рис.8.2. представлены структурная схема рассматриваемого модема с указанием цепей стыка. Блок подключения входят элементы предназначенные для установления и разъединения соединения, а также обеспечение взаимодействия с устройством автоматического вызова. Дифференциальный трансформатор, установленный в блоке подключения, и фильтры, входящие в состав передатчика и приемника канала передачи данных и вспомогательного канала, обеспечивают устранение переходных помех между ними. При использовании двух каналов – основного и вспомогательного – мощность сигнала в каждом из них не должна превышать половины допустимой для телефонного соединительного тракта средней мощности.
В тех случаях, когда при передаче изохронных сигналов данных должен быть обеспечен тактовый синхронизм АПД, в описываемом модеме может модеме может быть предусмотрен тактовый генератор. В интервале времени разделяющей состояние «включено» в цепях 105 и 106, посылается синхронизирующая последовательность вида 101010… При этом следует иметь в виду, что указанная последовательность появляется на стыке цепи 104 в то время, когда цепь 109 стыка на приемной стороне уже перешла состояние «включено», а цепь 106 на передающей стороне еще находится в состоянии «выключено».
Стык
![]() 120/
HS2
120/
HS2
![]()
![]()
![]() 121/HM2
121/HM2
|
![]() 118/HD1
118/HD1
![]()
![]() 105/S2
105/S2
![]()
![]() 106/M2
106/M2
|
|
![]()
![]()
![]() 103/D1
103/D1
![]()
![]() Абонентский
Абонентский
![]()
![]()
|
![]()
![]()
![]()
![]() 111/S4
111/S4
![]() 113/T1
113/T1
![]()
![]() 114/T4
114/T4
![]() 115/T4
115/T4
|
![]() 104/D2
104/D2
![]()
|
![]() 119/HD2
119/HD2
![]()
![]() 122/HM5
122/HM5
![]() 107/M1
107/M1
![]() 108/S1
108/S1
![]() 125/M3
125/M3
![]() 102/E2
102/E2
![]() 101/E1
101/E1
Рис.8.2.Модем на 1200/600 бит/с.
8.3.Модулятор и демодулятор основного канала. Модуляцию и демодуляцию в основном канале можно осуществлять по тем же принципам, которые использованы на 200 бит/с. Однако из-за сравнительно широкой (по отношению средней частоте) полосы частот в данном случае наиболее эффективны другие пути реализации этих операций, в частности для демодуляции целесообразно использовать дискриминаторы, работающие по принципу измерения интервала времени между двумя переходами сигнала ЧМ через нуль.
Ограниченный по полосе
![]() Принятый сигнал
Принятый сигнал
![]() t
t
|
![]() t
t
|
![]()
![]()
![]()
![]()
![]()
![]()
![]() Пороговый уровень
Пороговый уровень
![]() t
t
|
![]()
![]() t
t
Г)
Рис.8.3.Структурная схема дискриминатора переходов через нуль и временные диаграммы сигналов:
О – ограничитель; И – схема для получения импульсов ; Л – звено , формирующее линейно изменяющийся во времени сигнал ; ПС – пороговая схема.
Как видно из рис. 8.3. на котором приведены временные диаграммы иллюстрирующие один из возможных вариантов этого метода демодуляции, на выходе дискриминатора получается последовательность импульсов (диаграмма «г») у которой постоянная составляющая зависит от частоты. Поскольку такого рода «дискриминаторах перехода через нуль» полоса частот не ограничивается, их помехоустойчивость несколько ниже, чем у частотных дискриминаторов с колебательными контурами.
|
|
![]()
![]()
![]()
|
|
|
![]()
![]()
![]()
![]() принятый сигнал
принятый сигнал
![]()
![]()
|
|
Рис.8.3.1.Демодулятор с частотным дискриминантом :
КК – колебательный контур ;В – выпрямитель ;Д – дифсистема ; ФНЧ – фильтр ;ПС – пороговая схема.
Для того чтобы обеспечить достаточно высокое качество передачи и в тех случаях, когда характеристики соединительного тракта неблагоприятны, не применяют компромиссные корректоры, которые выравнивают характеристики затухания и ГВЗ, наиболее типичные для соединительных трактов используемой сети.
8.4.Вспомогательный канал. Во вспомогательном канале (обратном) канале, рассчитанном на максимальную скорость 75 бит/с, также используется частотная модуляция, хотя и с другими параметрами: средняя частота 420 Гц, девиация частоты ± 30 Гц, а характеристические частоты, таким образом, 390 и 450 Гц. Для всех перечисленных частот допускается отклонение 4 Гц. Следовательно, на приеме максимальное отклонение каждой из частот с учетом максимального сдвига частоты в ВЧ тракте может достигать 10 Гц. Отклонение частоты в рассматриваемом канале из-за его сравнительной узкой полосы пропускания ведут к значительному возрастания краевых искажений. Поэтому на практике в обратном канале часто применяют специальные регулирующие схемы для коррекции сдвигов частоты, возникающих в линии связи.
8.5.Характеристики передачи. На рис. 8.5. показана зависимость степени синхронных искажений, измеренных в цепи соединений, от скорости передач. В рассматриваемом случае из-за сравнительно широкой полосы пропускания сдвиг частоты не имеет значение. Для канала передачи данных на 600 бит/с при более высоких скоростях степень синхронных искажений резко возрастает, так как ограничение полосы частот в модеме этого канала рассчитано на передачу со скорость 600 бит/с. Благодаря этому ограничению вероятность ошибки в бите для такого канала меньше, чем канала на 1200 бит/с.
Заключение .
Расчитанное в работе УПС отвечает всем параметрам технического задания и рекомендациям МККТТ. В состав устройства входят :
на приемном конце - система полосовых фильтров; компромисный корректор; частотный демодулятор стандарта V.23, реализованный на дискретной схеме; корректор; замкнутое устройство поэлементной синхронизации с дискретным управлением; усилитель;
на передаточном конце - система полосовых фильтров; модулятор V.23; устройство синхронизации; усилитель.
Данное УПС можно использовать для работы по телефонным каналам со скоростью передачи 1200/600 бит/с.
Список использованной литературы
1.Боккер П. Передача данных. Т.2.- М.: Связь.- 1980-81
2.Абдулаев Д.А., Арипов М.Н. Передача дискретных сообщений в задачах и упражнениях. - М.: Радио и связь, 1985
3.Емельянов Г.А., Шварцман В.О. Передача дискретной информации. -М.: Радио и связь,1982
4.Передача дискретных сообщений: Учеб. Под ред. В.П. Шувалова.- М.: Радио и связь, 1990
5. Арипов М.Н. Захаров Г.П. Малиновский С.Т. Проектирование и техническая эксплуатация сетей ПДС.-М.: Радио и связь,1988
Похожие рефераты:
Проектирование аппаратуры передачи данных
Методы позиционирования и сжатия звука
Приемник цифровой системы передачи информации ВЧ-каналом связи по ВЛ
Техническая диагностика средств вычислительной техники
Беспроводные телекоммуникационные системы
Оборудование летательных аппаратов
Курс лекции по компьютерным сетям
Линейное оборудование синхронной цифровой иерархии SL16
Классификация модемных протоколов
Машины, которые говорят и слушают
Электронный документооборот страхового общества