| Похожие рефераты | Скачать .docx |
Курсовая работа: Приборы автоматического управления механизмами
Введение
Механизация и автоматизация производственных технологических процессов направлена на максимальное или полное сокращение применения ручного труда обслуживающего персонала при производстве продукции с целью снижения ее себестоимости, а также повышения производительности труда. Эти мероприятия возможно осуществить только при наличии специальных датчиков, отслеживающих и считывающих заданные параметры работы, формирующие сигнал, а затем передающие этот сигнал в общую систему управления. Для решения этих задач создан целый ряд датчиков различных типов и модификаций в зависимости от технических требований, предъявляемых к ним, и условий эксплуатации, выполняют функции средств управления, служат для общего управления в общей схеме механизации или автоматизации и подразделяются на датчики импульсов, преобразователи импульсов и исполнительные двигатели.
Наибольшее распространение получили датчики, использующие электрическую энергию.
Электрические датчики различаются как по физической природе контролируемого импульса, так и по конструкции. Эти датчики способны выполнить множество функций, в частности они осуществляют контроль перемещений исполнительных узлов рабочей машины, контролируют расход потребляемой мощности, скорости движения рабочих узлов и другие параметры.
1. Конечные путевые выключатели
Широкое распространение в системах автоматического управления работой технологического оборудования получили датчики, контролирующие ход и конечное положение рабочего узла, так называемые конечные выключатели.
Конечный выключатель − электрический аппарат, обеспечивающий переключения в цепях управления силовых приводов машин (механизмов) или их органов в определённых точках движения. Конечный выключатель приводится в действие самим перемещающимся механизмом обычно в конце своего движения либо в заданном месте пути следования. Конечные выключатели по своей конструкции могут быть контактными и бесконтактными, а по способу воздействия их конструкции подразделяются на нажимные (кнопочные), рычажные, шпиндельные и вращающиеся конечные выключатели.
Наибольшее распространение в системах механизации и автоматизации технологического оборудования до широкого применения электроники имели контактные датчики сигналов о перемещениях (путевые переключатели) исполнительных органов. Применение выключателей этого типа сократилось, но в отдельных областях они остаются незаменимы, например, при механизации термических нагревательных печей.
При линейной скорости перемещения исполнительного органа свыше 0,4 м/мин применяют простые путевые переключатели. Один из них показан на рис.1. При перемещении штока 7 под действием внешних сил (например, упоров, установленных на контролируемом узле) контакты 4, 5, 9 и 10 размыкаются, а контакты 1, 2, 11 и 13 замыкаются.
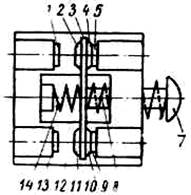
Рис.1. Путевой переключатель типа ВК41:
1,5, 9, 13 — неподвижные контакты; 12 — карболитовая пластина; 2, 4, 10, 11 — подвижные контакты; 3 — несущий мостик; 8, 14 — пружины, воздействующие на мостик к карболитовый шток 7.
При меньших скоростях появляется значительное разрушение контактной системы из-за длительно действующих контактных дуг. В этих случаях рекомендуется ставить переключатели моментного действия.
На рис. 2 приведен моментный путевой переключатель типа ВК-211. В конструкции этих переключателей замыкание контактов происходит практически мгновенно под действием пружин независимо от скорости поворота рычага 2.
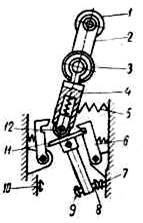
Рис. 2. Моментный переключатель типа ВК-211:
1— ролик; 2 — рычаг; 3 — ленточные пружины, связывающие рычаг 2 с поводком 4; 5 — пружина; 6 — подпружиненная защелка; 7, 8 9, 10 — контакты; 11— поворотная планка, несущая подвижные контакты; 12 — ролик.
Во всех конструктивных модификациях конечных выключателей, их работа основана на прямом воздействии внешнего усилия непосредственно на шток датчика, переключающего электрические контакты. Это усилие может быть приложено или непосредственно самим контролируемым узлом рабочей машины, или специальным упором, жестко закрепленном на контролируемом узле и соответственно перемещающемся вместе с ним с той же скоростью.
При монтаже и точной установке конечного выключателя следует учитывать, что рабочий ход штока переключателя небольшой (в переключателе типа 411 составляет 4мм), а рабочий узел технологической машины при работе имеет инерционность движения, которая должна быть компенсирована. С этой целью шток переключателя имеет дополнительный холостой ход, который приблизительно в полтора раза больше рабочего хода штока. Если же ход исполнительного органа рабочей машины при движении по инерции больше суммы рабочего и холостого ходов штока переключателя, то, естественно, создается аварийная ситуация, т. к. произойдет разрушение конечного выключателя.
Исключить эту ситуацию возможно только применением в системе механизации конечных выключателей, у которых воздействие внешнего усилия на шток осуществляется через рычаг с роликом. В данной конструкции применяется рычаг второго рода, поэтому ход ролика, непосредственно контактирующего с упором, значительно больше, чем у выключателя типа ВК 411.Конечный выключатель типа ВК 411 в силу своих конструктивных особенностей используется в основном в системах контроля и блокировок статических узлов, например дверей шкафов конденсаторных батарей высокочастотных установок.
Приведенные выше конструкции конечных выключателей типа ВК являются контактными и могут работать в широком диапазоне напряжений (от 12 до 220 В) и в этом их преимущество. К преимуществам следует так же отнести простоту устройства и обслуживания.
Однако следует учитывать, что чем выше напряжение, на котором работает выключатель, и меньше скорость срабатывания, тем большая вероятность подгорания контактов, вызываемого длительностью воздействия контактной дуги. Контакты выключателя для лучшей электропроводности содержат серебро и которые необходимо периодически промывать для обеспечения работоспособности. Для промывки контактов может быть использован только спирт – ректификат, использование для промывки ацетона или любого другого растворителя недопустимо, т. к. при их использовании на поверхности контактов образуется оксидная пленка бело цвета, являющаяся диэлектриком.
Недостатком этого типа конечных выключателей следует считать и то, что они чувствительны к повышенной влажности, пыли и грязи.
В любом термическом цехе основной закалочной средой является вода, которая и создает повышенную влажность в атмосфере цеха, а запыленность в термическом цехе может достигать значительной величины, т. к. предельно допустимая концентрация (ПДК) допускается до 4 мг/ м3 (класс опасности 4).
Когда требуется получить срабатывание путевого переключателя при очень малом перемещении штока (0,5—0,7 мм) и небольшом давлении (0,5—0,7 кГ) применяют микропереключатели типа МП 1.
С развитием промышленной электроники получили распространение бесконтактные индуктивные выключатели типа БВК. Принцип действия данного выключателя основан на изменении амплитуды колебаний генератора датчика при введении в активную зону датчика металлического экрана.
Применение этих датчиков при некотором усложнении электрической схемы дает следующие преимущества:
а) отсутствуют контактирующие элементы;
б) отсутствие силовых воздействий на элементы датчика;
в) высокая чувствительность датчика к положению движущихся частей механизмов автоматической линии.
г) конструкция датчика не чувствительна к повышенной влажности, запыленности атмосферы цеха и грязи.
Бесконтактные конечные выключатели работают на напряжении 24 В (выключатели постоянного тока) и 110 В (выключатели переменного/постоянного тока), что требует применения промежуточных реле только на указанное напряжение.
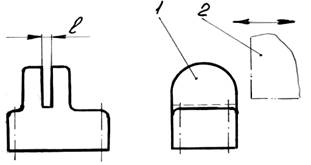
Рис.3. Бесконтактный конечный выключатель
Бесконтактный конечный выключатель (рис.3) выполнен в корпусе из ударопрочного полистирола, следовательно, диэлектрическом корпусе 1, внутри которого размещены электрические и полупроводниковые элементы, которые с целью герметизации полностью залиты компаундом холодного отверждения.
Обязательным условием срабатывания датчика (выдача электрического сигнала) является введение в паз размером l экрана 2, изготавливаемого из немагнитного материала (обычно из листового алюминиевого сплава) и жестко закрепляемого на контролируемом узле рабочей машины так, чтобы он свободно, не задевая за стенки, входил в паз выключателя. Направление входа экрана в паз выключателя не лимитировано.
Бесконтактный конечный выключатель крепится двумя винтами на устройстве, не связанным с контролируемым узлом и обеспечивающем возможность перемещения выключателя вдоль линии движения контролируемого узла для получения требуемой точности считывания сигнала. В зависимости от конструктивных особенностей конечных выключателей ширина паза, в который входит экран, колеблется от 4 до 10 мм (соответственно колеблется и толщина экрана), в настоящее время выпускаются выключатели с шириной паза 25 мм.
Отечественной промышленностью (заводы г.г. Брянск, Курск, Орел, Калуга, Смоленск) выпускаются бесконтактные выключатели, перечень которых приведен ниже: БВК − 221; БВК − 222; БВК − 231; БВК − 260; БВК − 261; БВК − 262; БВК − 263; БВК − 264; БВК − 265; БВК − 333.
Совершенствование конструкции бесконтактных выключателей и улучшение их технико − эксплуатационных характеристик привело к созданию и внедрению в производство торцовых бесконтактных выключателей, у которых рабочей поверхностью является торец, направленный в сторону контролируемого узла.
Корпус выключателя 1 изготовлен полым из немагнитного металла, на наружной поверхности корпуса по всей его длине нарезана метрическая резьба, на которую навернуты две гайки 2. Гайки необходимы для крепления выключателя в специальном устройстве и регулировки расстояния Sот торца выключателя 1 до поверхности контролируемого узла 3. Гайки могут отсутствовать при креплении выключателя непосредственно в металле. Внутри корпуса размещены полупроводниковые элементы и электромагнитная система с катушкой индуктивности, полностью залитые с целью обеспечения герметичности компаундом холодного отверждения. Выдача сигнала производится по проводам 4, выведенным через торец, противоположный рабочему.
Принцип действия. Торцовые бесконтактные выключатели предназначены для контроля положения механизма или отдельных узлов. Они находят широкое применение в станках, кузнечно-прессовом оборудовании, литейных машинах, конвейерах и т.д., во всех отраслях промышленности. Высокая надежность, независимость срока службы от числа срабатывания, надежная герметизация и возможность применения в неблагоприятных условиях, большое быстродействие, высокая долговечность - все эти преимущества позволяют с успехом заменять контактные путевые переключатели, повышая надежность схем управления различными производственными процессами.
Принцип действия бесконтактного конечного выключателя основан на изменении амплитуды колебаний генератора при внесении в активную зону датчика металлического, магнитного, ферромагнитного или аморфного материала определенных размеров. При подаче питания на конечный выключатель в области его чувствительной поверхности образуется изменяющееся магнитное поле, наводящее во внесенном в зону материале вихревые токи, которые приводят к изменению амплитуды колебаний генератора. В результате вырабатывается аналоговый выходной сигнал, величина которого изменяется от расстояния между датчиком и контролируемым предметом. Триггер преобразует аналоговый сигнал в логический, устанавливая уровень переключения и величину гистерезиса. Активная зона бесконтактного индуктивного выключателя (рис.4) - та область перед его чувствительной поверхностью, где более всего сконцентрировано магнитное поле чувствительного элемента датчика. Диаметр этой поверхности приблизительно равен диаметру датчика.
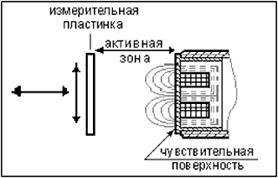
Рис.4. Активная зона бесконтактного индуктивного выключателя
Номинальное расстояние переключения - теоретическая величина, не учитывающая разброс производственных параметров датчика, изменения температуры и напряжения питания (рис.5).
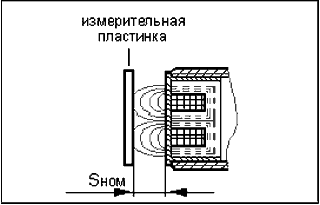
Рис.5. Устройство бесконтактногоиндуктивного выключателя
Рабочий зазор - это любое расстояние, обеспечивающее надежную работу бесконтактного выключателя в допустимых пределах температуры и напряжения. 0≤Sраб ≤0,8 Sном.
Поправочный коэффициент дает возможность определить рабочий зазор, который зависит от металла, из которого изготовлен объект воздействия.
| Материал | Коэффициент | Материал | Коэффициент |
| Сталь40 | 1,00 | Алюминий | 0,30…0,45 |
| Чугун | 0,93…1,05 | Латунь | 0,35…0,50 |
| Нерж.сталь | 0,60…1,00 | Медь | 0,25…0,45 |
Направление движения контактирующей поверхности относительно рабочего торца выключателя не лимитируется.
Торцовые конечные выключатели выпускаются как круглыми диаметром в пределах 4…55 мм, так и прямоугольными размером 5x5x25 до 80x80x50 мм и частотой переключения 2500 Гц.
2. Приборы контроля давления рабочих сред – реле давления
Нормальное функционирование технологического оборудования в автоматическом режиме работы должно происходить в условиях постоянного контроля заданных параметров используемых в этом оборудовании газообразных или жидких рабочих сред. Основным параметром этих сред является давление этой среды в подводящей магистрали.
Использование в системах автоматизации производственных процессов пневмомеханизмов, работа которых основана на использовании в качестве рабочей среды сжатого воздуха, ставит задачу подачи сжатого воздуха к его потребителям строго определенного давления. Эта задача решается с помощью специальных регуляторов давления (редукторами давления или редукционными клапанами).
Редуктор давления — регулятор, служащий для автоматического понижения давления сжатого воздуха и автоматического поддержания его на заданном уровне.
В качестве редукторов применяются преимущественно диафрагменные (рис.8) и сильфонные. Эти редукторы используются для получения относительно невысоких давлений (до 30—40 кГ/см2) вследствие ограниченной прочности диафрагмы и сильфона.
Затвор в клапанах, предназначенных для работы с газами, выполняют обычно в виде плоского (пластинчатого) обрезиненного или изготовленного из эластичного материала клапана, сажаемого на гнездо с закругленными выступающими кромками (реже применяются шариковые затворы). На рис.8 a, показан один из аппаратов этого назначения, который в практике получил название стабилизатора (редуктора) давления. Принцип его работы основан на автоматическом изменении проходного сечения потока воздуха при изменении давления и расхода воздуха в питающей сети и поддержании, таким образом, постоянства давления воздуха на выходе стабилизатора (в линии потребителей). Постоянство давления обеспечивается автоматическим изменением положения дроссельного клапана, регулирующего проходное сечение потока воздуха при колебаниях давления в камере а, связанного с выходом.
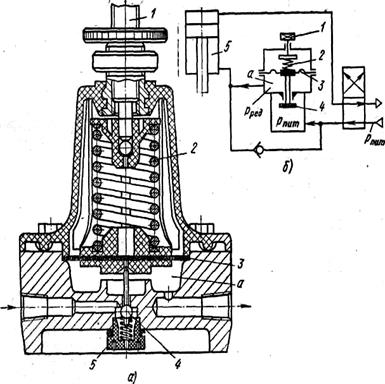
Рис.6. Редуктор (регулятор) давления воздуха (а) и схема применения его в пневмоприводе (б).
На рис.6 a, показан один из аппаратов этого назначения, который в практике получил название стабилизатора (редуктора) давления. Принцип его работы основан на автоматическом изменении проходного сечения потока воздуха при изменении давления и расхода воздуха в питающей сети и поддержании, таким образом, постоянства давления воздуха на выходе стабилизатора (в линии потребителей). Постоянство давления обеспечивается автоматическим изменением положения дроссельного клапана, регулирующего проходное сечение потока воздуха при колебаниях давления в камере а, связанного с выходом.
Для установки требуемого рабочего давления на выходе стабилизатора служит регулировочный (дроссельный) винт 1, с помощью которого изменяют усилие пружины 2, воздействующей на мембрану 3, связанную с клапаном 4, который удерживается в седле пружиной 5. Изменение давления и расхода воздуха в сети вызывает перемещение мембраны 3 и клапана 4, вследствие чего изменяется проходное сечение потока воздуха до тех пор, пока силы, воздействующие на мембрану 3, не уравновесятся и давление в камере а не стабилизируется. При уменьшении давления в камере а, что может быть вызвано уменьшением давления в подводящей сети или увеличением расхода воздуха потребителями, мембрана 3 под действием пружины 2 опустится и, переместив вниз клапан 4, увеличит проходное сечение потока воздуха, что обеспечит выравнивание давления в камере а до заданного.
Увеличение давления в камере а вызовет обратное действие указанных частей стабилизатора. Малейшее изменение давления в камере а вызовет мгновенное изменение положения клапана 4.
Электропневматическое реле и индикатор давления. Для контроля давления в пневмосистемах, осуществляемого воздействием на контакты микропереключателя, включенного в электрическую цепь управления, применяют реле давления. Реле представляет собой нагруженную пружиной мембрану 1, на которую действует рабочее давление воздуха (рис.7).
Давление воздуха, подводимого к каналу а, действует через мембрану 1 на грибок 2 и толкатель 5. Если усилие, развиваемое давлением воздуха, превышает усилие противодействующей пружины 3 (усилие пружины регулируется винтом 4), то толкатель 5 перемещается и воздействует на штифт микропереключателя 6.
Аналогичное по принципу действия устройство, называемое индикатором давления, применяют для подачи сигнала о наличии давления на определенных участках пневмосистемы. Этот индикатор представляет собой миниатюрный силовой цилиндр одностороннего действия (рис.8). В корпусе 1 цилиндра перемещается поршенек 3, уплотняемый резиновой манжетой 4.
При отсутствии давления на контролируемом участке пневмосистемы поршенек 3 под действием пружины 2 удерживается в крайнем правом положении.
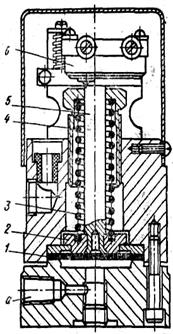
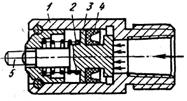
Рис.7. Электропневматическое реле Рис.8. Силовой цилиндр
При появлении же давления он, сжимая пружину 2, перемещается влево. Выдвинутый шток 5 сигнализирует с помощью механических или электрических устройств о наличии давления на том участке пневмоцепи, к которому подключен индикатор давления.
В настоящее время в связи с развитием электроники получают развитие и применение в системах автоматизации технологических процессов реле давления Beck 901 Prescal. Реле этого типа являются регулируемыми и предназначены для измерения избыточного давления, разряжения или разности давлений жидкостей или газов (как агрессивных так и неагрессивных). Установка величины контролируемых параметров осуществляется вручную. Принцип действия реле давления Beck 901 Prescal заключается в том, что оно содержит в своей основе переключающий механизм мгновенного действия, который приводится в движение мембраной и который может быть настроен на требуемое давление с помощью винтовых пружин.
Если давление достигает установленной величины, происходит переключение механизма (размыкание или замыкание контактов).
Реле давления серии 901 могут перестраиваться в процессе работы в широком диапазоне рабочих давлений.
3. Приборы контроля времени – реле времени
В системах автоматизированных или механизированных производственных процессов существует необходимость отсчета времени выдержки (фиксации) какого – либо элемента технологического оборудования, т. е. задержка времени срабатывания последующего по циклограмме работы механизма с момента окончания работы предыдущего на период совершения, как правило, технологической операции.
Электрическое реле времени − устройство, электрические контакты которого замыкаются (или размыкаются) с некоторой задержкой во времени после получения управляющего сигнала. Величину задержки можно произвольно регулировать, влияя на скорость изменения физической величины, воздействующей на релейный элемент реле времени от момента поступления управляющего сигнала до достижения порога срабатывания. Существуют различные конструкции реле времени, в том числе электромеханические (маятниковые), электропневматические, электронные и др.
Маятниковые реле времени дают короткие выдержки от 2 до 10 сек, электропневматичеляские — в пределах до 180 сек, а электронные реле выпускают нескольких исполнений, имеющих широкий диапазон выдержек времени.
Электропневматические реле времени имеют наибольшее распространение в системах управления автоматизированным технологическим оборудованием. Выдержка времени в таком реле основана на взаимодействии усилия приводной пружины, освобождающейся при втягивании якоря электромагнита и торможений выравнивания давлений воздуха внутри и снаружи специальной камеры. Выдержка времени регулируется изменением сечения пропускного сопла истечения воздуха.
В настоящее время широко распространены электронные реле времени, выпускаемые отечественной промышленностью: РВ – 100; РВ – 200; РВК – 1М; РВК – 2М; РВК – 3, а также электронные реле времени серии РЭВ – 201.
Двухканальное реле времени РЭВ-201.2
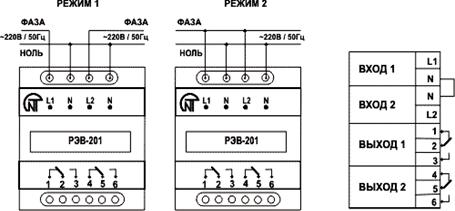
Электронное двухканальное реле времени с задержкой на включение РЭВ-201 (рис.9) предназначено для коммутации электрических цепей переменного тока 220В/50 Гц и постоянного тока 24-100 В с регулируемыми задержками времени: канал 1 от 0 до 10 сек, канал 2 – от 0 до 10 мин. Каждый канал является самостоятельным реле времени. Выдержка времени каждого канала начинает отсчитываться от момента подачи питания на канал. Реле РЭВ-201 позволяет обеспечить два режима работы:
Режим 1. Независимая работа каналов. На каждый канал подается разновременно независимое питание. Выдержка времени отсчитывается от момента подачи питания на каждый канал (режим двух реле);
Режим 2. Параллельная работа каналов. На каждый канал одновременно подается одно и то же питание. Отсчет времени по обоим каналам начинается одновременно. Время срабатывания соответствует выставленным с помощью регулировок задержкам для каждого канала (режим одного реле с двумя разными выдержками).
ВНИМАНИЕ: При работе в «режиме 1» питание каналов должно иметь общий ноль.
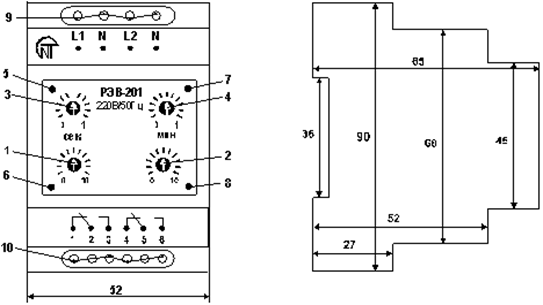
Рис.9. Схема реле времени с задержкой на включение РЭВ-201
1 - установка задержки срабатывания по 1-му канал;
2 - установка задержки срабатывания по 2-му каналу;
3 - установка времени замыкания выходных контактов первого канала;
4 - установка времени замыкания выходных контактов второго канала;
5 - зелёный светодиод наличия напряжения на 1-ом канале;
7 – зелёный светодиод наличия напряжения на 2-ом канале;
6 - красный светодиод срабатывания 1-го канала;
8 – красный светодиод срабатывания 2-го канала;
9 – входные контакты для подключения питания;
10 – выходные контакты.
Отсчет времени по каждому каналу начинается с момента подачи питания на контакты «L1-N», (канал 1); «L2-N», (канал 2). Задержка выставляется ручками потенциометров. Каждый канал имеет две регулировки. Регулировки первого (левого) канала от 0 до 1 сек и от 0 до 10 сек. Регулировки второго (правого) канала от 0 до 1 мин и от 0 до 10 мин. Задержка срабатывания каждого канала определяется суммой задержек, выставленных двумя потенциометрами.
При появлении питания на канале загорается зеленый светодиод. Загорание зеленого светодиода сигнализирует о начале отсчета времени. Срабатывание реле по окончании задержки сигнализируется загоранием красного светодиода.
Каждый канал на выходе имеет по одному размыкающему и одному замыкающему контакту: 1-2 и 4 - 5 –размыкающие,2-3 и 5-6 –замыкающие, «1-2-3» - канал 1, «4-5-6» - канал 2; обе группы - перекидные).
Технические характеристики
| Номинальное напряжение, В | 220 |
| Нижний порог напряжения питания, запускающий реле, В | 170 |
| Максимально допустимое напряжение питания, В | 300 |
| Первоначальная фиксированная выдержка времени при напряжении питания 220В, не более, с | ~ 0.5 |
| Точность удержания временной уставки, не более, % | 01.май |
| Точность выставления уставки (точность шкалы), не более, % | 3 |
| Диапазон регулирования, с | 0-220 |
| Регулировка выдержки времени | плавная |
| Количество делений шкал потенциометров | 10 |
| Число и вид контактов на каждый канал (ЗК - замыкающий, РК - размыкающий; перекидные) | 1 ЗК и 1 РЗ |
| Климатическое исполнение | У3 |
| Степень защиты: реле клеммника | ІР40 ІР20 |
| Коммутацион. ресурс выходных контактов: | 100 тыс. 1 млн. |
| под нагрузкой 5А, не менее, раз | |
| под нагрузкой 1А, не менее, раз | |
| Потребляемая мощность (под нагрузкой), не более, ВА | 1.0 |
| Масса, не более, кг | 0.150 |
| Габаритные размеры, мм | 50х88х65 |
| Диапазон рабочих температур, С | -80 |
| Температура хранения, С | -115 |
Схема подключения
Реле выпускается полностью готовым к эксплуатации и не требует особой подготовки к работе. При эксплуатации реле в соответствии с техническими условиями и настоящим паспортом в течение срока службы, в том числе, при непрерывной работе, проведение регламентных работ не требуется. Подключить реле только согласно схеме подключения.
В том случае, когда необходима выдержка времени больше чем могут дать вышеперечисленные реле времени, (например, в случае нагрева и отпуска большой партии металла в камерной печи), используют специальные электронные таймеры, диапазон выдержки у которых достигает 24 часов, а отсчет ведется по минутам и часам.
Реле счета импульсов выполнено в виде комбинации шагового искателя, промежуточного реле, переключателя и преобразователей тока и представляет собой вид запоминающего устройства.
При дистанционном управлении для синхронизации выполнения команд, подаваемых разным механизмам, применяются сельсины.
4. Приборы контроля скорости вращения – реле контроля скорости
В системах автоматизации технологических процессов часто возникает необходимость иметь точную скорость (число оборотов) вращения исполнительного механизма. С этой целью созданы и успешно эксплуатируются в производственных условиях приборы контроля скорости вращения – реле контроля скорости (РКС).
Эти приборы являются датчиками, которые дают импульс в том случае, когда скорость движения соответствующего исполнительного механизма будет выше или ниже заданного значения. Для этой цели обычно применяют датчики электрического типа. Эти датчики в зависимости от принципа действия могут быть индуктивными, центробежными или типа тахогенератора.
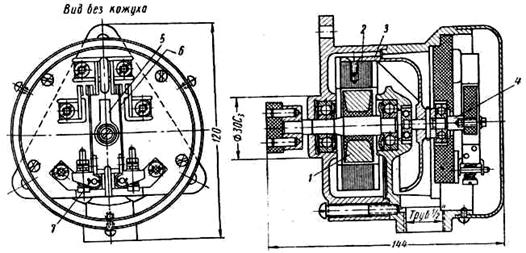
Рис.10. Скоростной индуктивный датчик типа РКС
Скоростной индуктивный датчик типа РКС (рис.10) выполнен с жестко укрепленным на валике датчика постоянным магнитом 1. Кольцо 2 с обмоткой на внутренней стороне охватывает магнит ипри его вращении в обмотке катушки появляется ток, а кольцо, закрепленное на кронштейне 3, поворачивается в сторону вращения магнита. На другом конце вала 4 укреплена колодка 5, которая при повороте размыкает нормально замкнутые (НЗ) и замыкает нормально открытые (НО) контакты 6. Поворот колодки зависит от скорости вращения магнита 1, чем выше эта скорость, тем больше угол поворота колодки Настройка реле контроля скорости на требуемое по технологическому процессу число оборотов, а также переключение контактов осуществляется регулировочными винтами 7. Этот датчик устойчиво работает в пределах 930—3000 мин-1, при меньших числах оборотов датчик недостаточно чувствителен.
Скоростной центробежный датчик основан на действии центробежной силы, которая при увеличении числа оборотовраздвигает шарнирно подвешенные к вращающейся вертикальной оси грузы. Эти грузы при определенном числе оборотов замыкают или размыкают соответствующие контакты электрической цепи управления.
5. Промежуточные звенья схемы электроавтоматики
К промежуточным звеньям, преобразующим сигналы датчиков, относятся промежуточные реле, реле пуска и защиты электродвигателей при перегрузке, счетчики импульсов и др., а также вычислительные, сравнивающие и измерительные устройства.
Промежуточное реле используют в разных случаях, например для размножения контактов в дополнение к путевому переключателю, когда у последнего не хватает их для посылки командных сигналов; усиления командных сигналов включением цепи питания током более высокого напряжения; постановки какого-либо прибора, в том числе и самого реле на самопитание — как запоминающее устройство и т. п.
Реле в общем случае состоит из катушки, внутри которой расположен стальной сердечник. Торец катушки находится на одном уровне с торцом стального сердечника, под которым расположен и шарнирно закреплен якорь, способный легко поворачиваться в сторону сердечника. Свободным концом якорь контактирует с жесткими пружинными лепестками, несущими контакты, которые в свою очередь контактируют с контактами на неподвижном жестком пружинном лепестке. Лепесток представляет собой плоскую пружину, обеспечивающую плотное прилегание контактов и осуществляющую компенсацию хода якоря при воздействии последнего на лепесток.
Реле работает следующим образом. Электрический ток поступает на обмотку катушки и намагничивает стальной сердечник. Под воздействием созданного магнитного поля якорь притягивается к сердечнику и одновременно воздействует на пружинный лепесток с контактами. Если качающийся лепесток заключен между двух статических лепестков, каждый из которых имеет свои контакты, то при работе (качании) подвижного лепестка одни контакты будут размыкаться, а другие замыкаться. Увеличивая количество подвижных и неподвижных лепестков, электрически изолированных друг от друга, создается возможность размножения полученного сигнала от контролирующего элемента схемы электроавтоматики.
Для обеспечения питания элементов электросхемы электрическим напряжением применяются блоки питания типа БПТ – 11; БПТ – 11/12 и БПТ – 1002, работающие на тиристорах и выполняющие функции стабилизатора напряжения, понижение напряжения до требуемого уровня, необходимого по условиям работы схемы электроавтоматики, и если есть необходимость – преобразование переменного тока в постоянный.
В схемах электроавтоматики применяются промежуточные реле типа РП – 23; 25; 250; 321; РП – 8; 9; РП – 16-5; РП – 16 -1М/7М; промежуточные реле постоянного тока типа РПУ – 3М – 114; 116; 112Т и др., а также дифференциальные реле, размножающие и преобразующие сигнал типа РНТ565; 566; 566/2; 567/2 и ДЭТ – 11; 11/2; 11/3; 11/4; 11/5, а также реле повторного включения РПВ – 01; 02.
Для защиты электродвигателей от перегрузки применяются реле максимального тока, реагирующие на повышение в цепи питания тока выше установленного допускаемого номинала. С этой целью используются реле максимального тока типа РСТ – 11; 13; РСТ – 11М; РСТ – 15; 23, но наибольшее расспрос ранение получили для защиты электродвигателя от перегрузок реле электротепловые токовые типа ТРТ – 110; 120; 130; 140; 150 и ТРТП – 110; 120; 130; 140; 150
Запуск в работу электродвигателя рабочей машины в системе автоматизации технологических процессов производится с помощью реле – пускателей нереверсивных типа РЭВ – 1224; 1314; 1404 – питание постоянным током, РЭВ – 2224; 2313 – питание переменным током, а реле – пускатели РЭВ – 2318 и РЭВ – 2408 дополнительно снабжены тепловым реле. Кроме указанных выше типов используются реле – пускатели типов РЭП – 15П – 0102;. – 0202; −0304; − 0404.
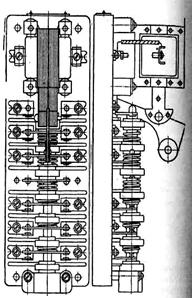
Рис.11. Реле типа ЭП
Для визуального показания наличия или отсутствия того или иного сигнала и его использования в электросхемах автоматизации применяют реле – указатели типа РУ – 21 (переменного тока), РУ – 21 (постоянного тока), РУ – 21 – 1 (постоянного тока). Все используемые реле имеют очень малое время срабатывания, равное 0,1 … 0,2 с, что практически можно считать мгновенным; частота срабатывания реле доходит до 2000 Гц. Такая частота срабатывания в схемах автоматизации технологических процессов в термических, кузнечно – прессовых и литейных цехах недоиспользуется, т. к. процессы движений рабочих органов, выдержки времени на период совершения технологической операции и т. п. операции совершаются за время, значительно большее, чем частота срабатывания реле. Этот фактор в свою очередь приводит к увеличению срока службы самого реле.
В схемах автоматизации технологических процессов получили распространение реле типа ЭП (рис.11), используемые как командоаппарат. Стойки с неподвижными контактами прикреплены винтами к основанию из карболита. Контактные мостики с контактами перемещаются с карболитовым штифтом. Через систему рычагов штифт связан с небольшим электромагнитом, который поднимает его вместе с подвижными контактами вверх при подаче тока в катушку магнита, замыкая НО контакты или размыкая НЗ контакты, при ртом происходит переключение цепей управления. При отключении тока штифт с подвижными контактами, под действием силы тяжести, опускается в нижнее положение. Реле многоконтактное. В системах автоматического управления встречаются также и телефонные электромагнитные реле типа РМ. Потребляемая мощность телефонного реле в 10—12 раз меньше мощности управляемой сети. Такое реле может без обгорания контактов разорвать цепь мощностью до 60 вт. Ток срабатывания около 0,001а.
В системах автоматического управления распространены различные электромагнитные муфты, включение и выключение которых осуществляется от командных сигналов датчиков.
В качестве электрических средств управления, применяемых как приводы исполнительных органов, можно назвать лишь два — электродвигатели и электромагниты. На автоматических линиях используют электродвигатели переменного тока. Электродвигатели постоянного тока применяют обычно в тех случаях, когда необходимо регулировать число оборотов.
В качестве привода для небольших поступательных перемещений элементов механизмов автоматического управления используют электромагниты, например для перемещения гидравлических и пневматических золотников, включения тормозов и муфт. Обычно принимают электромагниты переменного тока, которые изготовляют как с толкающим, так и с тянущим якорем для ходов от 10 До 15 мм и с тяговым усилием от 1 до 25 кГ.
6. Распределительная и управляющая пневмоаппаратура
В пневмосистемах применяется распределительная и регулирующая аппаратура тех же типов и конструктивных исполнений, что и в гидросистемах, и лишь в отдельных случаях применяются дополнительные средства для повышения герметичности и обеспечения смазки. Так, например, повсеместно применяются распределительные и прочие регулирующие клапаны с дополнительными средствами герметизации в виде резиновых уплотнительных колец, а также клапаны с эластичными затворами.
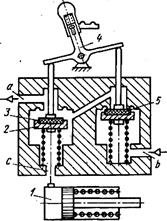
Рис.12. Клапанный распределитель
Распределительные клапаны. Для распределения воздуха применяются двухпозиционные клапаны и золотники с плоскими распределительными элементами, которые обеспечивают высокую герметичность соединения.
![]() На рис. 12 приведена принципиальная схема клапанного распределителя для управления пневмоцилиндром одностороннего действия. Подвод сжатого воздуха производится к каналу b, а отвод отработавшего воздуха— через канал а. Рабочая полость силового цилиндра 1 соединена с каналом с. При повороте рычага 4 утапливается тот или иной клапан 2 или 5, в результате воздух или подводится в рабочую полость цилиндра 1, или отводитсяиз него в атмосферу. Герметизация затворов клапанов осуществляется плоскими или резиновыми фторопластовыми кольцами 3, заделанными в металлические части затворов.
На рис. 12 приведена принципиальная схема клапанного распределителя для управления пневмоцилиндром одностороннего действия. Подвод сжатого воздуха производится к каналу b, а отвод отработавшего воздуха— через канал а. Рабочая полость силового цилиндра 1 соединена с каналом с. При повороте рычага 4 утапливается тот или иной клапан 2 или 5, в результате воздух или подводится в рабочую полость цилиндра 1, или отводитсяиз него в атмосферу. Герметизация затворов клапанов осуществляется плоскими или резиновыми фторопластовыми кольцами 3, заделанными в металлические части затворов.
Клапан управляется вручную различными рычагами и толкателями, а также электромагнитами и сжатым воздухом, причем при отсутствии управляющего воздействия затвор клапана обычно перекрывает под воздействием пружины проход воздуха от подводящего к выходному отверстию.
На рис. 16 представлены клапаны с ручным воздействием на толкатель 2, осуществляемым через рычаг 1 (рис. 13, а), и механическим воздействием на этот толкатель (рис. 13, б).
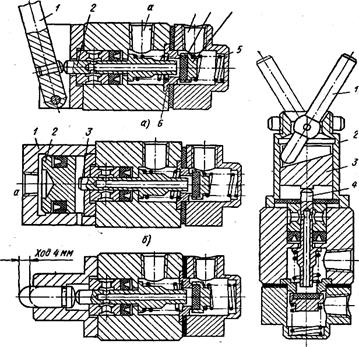
Рис.13. Клапаны с ручным воздействием на толкатель (рис. 13, а), и механическим воздействием на толкатель (рис. 13, б).
Сжатый воздух (давление до 6 кГ/см2) подводится к каналу b (рис. 13, а). В положении затвора клапана 4, показанном на рис. 13, а (толкатель 2 не нажат), он усилием пружины 5 и давления сжатого воздуха прижимается к седлу втулки 6 и герметично перекрывает с помощью резиновой прокладки 3 проход воздуху от входного отверстия b к отверстию а, которое сообщается через осевое сверление толкателя 2 с атмосферой. При утапливании (перемещении вправо) толкателя 2 он упирается сначала своим торцом в резиновую прокладку 3 затвора, отключая отверстие а от атмосферы, и при дальнейшемперемещении отрывает затвор клапана 4 от седла, открывая при этом проход сжатому воздуху от входного отверстия b в отверстие а пневмодвигателя.
На рис. 13, б показан клапан с пневматическим воздействием на толкатель 3 через поршень 2 пневмоцилиндра 1. Сжатый воздух подается в канал а.
В тех случаях, когда требуется обеспечить фиксирование затвора в обоих крайних его положениях, применяются различные механические средства. В клапане, представленном на рис. 14, б, это обеспечивается тем, что рычаг 1 воздействует на толкатель 4 через перемещающуюся в направляющих 2 косую шайбу 3, с помощью которой рычаг 1 фиксируется в обоих крайних своих положениях. Эта фиксация обеспечивается тем, что в обоих крайних положениях рычага 1 усилие реакции подпружиненной косой шайбы 3 стремится удержать его в этом положении.
7. Пневмоклапаны с электромагнитным управлением
В системах пневмоавтоматики широко применяются распределительные клапаны с электромагнитным управлением.
На рис. 14 приведена принципиальная схема пневмопривода с распределением плоскими клапанами с резиновыми затворами. Открытие (утапливание) клапанов 1 и 3 осуществляется электромагнитом 4 через рычаг 2 и закрытие — пружинами 7. При утапливании левого клапана 1 и освобождении правого клапана 3 левая полость пневмоцилиндра 6 соединяется с магистралью 5 питания сжатым воздухом, а правая — с атмосферой и наоборот. Применяются клапаны прямого действия и с серводействием (двухступенчатые клапаны).
На рис. 15, а приведена схема двухпозиционного клапанного распределителя (пневмокрана) с электромагнитным сервоприводом.
Запорный узел этого распределителя состоит из двух клапанов (затворов), один из которых 2, нагруженный пружиной 1, является собственно распределителем, а второй 3, связанный с якорем 6 электромагнита 5, — вспомогательным клапаном (клапаном-пилотом), управляющим основным клапаном 2.
При подаче напряжения на обмотку электромагнита 5 его якорь 6 переместится, преодолевая усилие пружины 7 вправо, в результате правый затвор вспомогательного клапана 3 сядет на седло 4, отойдя от седла 8, выполненного в основном клапане 2 (рис. 15, а). При этом воздух под давлением поступит в камеру с и, действуя на правый торец основного клапана 2, переместит его влево, соединив канал питания а с каналом потребителя b и перекрыв одновременно проход к каналу d, ведущему в атмосферу.
После обесточивания обмоток электромагнита 5 его якорь 6 под действием пружины 7 переместится влево, в результате связанный с ним затвор вспомогательного клапана 3 отойдет от седла 4 и соединит камеру с с атмосферой. Это позволит пружине 1 возвратить основной клапан 2 в исходное (правое) положение (рис. 15, б). При этом клапан 3 сядет на седло 8, перекрывая доступ воздуха из канала питания а в камеру с.
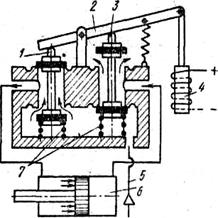
Рис. 14. Схема пневмопривода с распределением плоскими клапанами
Распространены пневмораспределители с плоским распределительным элементом (золотником), которые выполняются с различным (ручным, пневматическим и электрическим) управлением. Конструктивно эти золотники подобны аналогичным золотникам гидросистем.
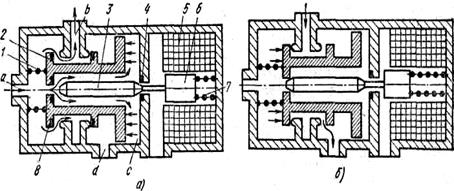
Рис. 15. На рис. 15, а приведена схема двухпозиционного клапанного распределителя; на рис. 15, б - с электромагнитным сервоприводом
Управление этими распределителями осуществляется, как правило, с помощью пневматических устройств или электромагнитов.
На рис. 16 показана принципиальная пневмосхема с электропневматическим распределителем в виде плоского золотника 9, приводимым связанным с ним дифференциальным плунжером 1 (диаметр D > d).
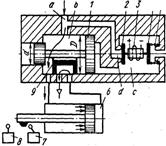
Рис. 16. Пневмосхема с распределителем в виде плоского золотника
Командными элементами в этой схеме являются концевые выключатели 7 и 8, на которые воздействуют упоры, установленные на штоке силового пневмоцилиндра 6. Исполнительным элементом является сердечник электромагнита 3, несущий управляющие пневмоклапаны 2 и 4, отжимаемые пружиной 5 в левое положение, в котором клапан 2 перекрывает канал d, соединенный с межпоршневой камерой b и вводным каналом а.
При втягивании сердечника в катушку пневмоклапан 4 отсоединяет камеру с от атмосферы, а клапан 2 соединяет ее с каналом пневмосети, в результате сжатый воздух, воздействуя на дифференциальный плунжер 1 перемещает плоский золотник 9 в левое положение, в соответствии с чем поршень пневмоцилиндра 6 перемещается влево.
В конце хода штока пневмоцилиндра 6 им приводится в действие выключатель 8, который обесточивает электромагнит 3, в результате клапан 4 соединяет камеру с с атмосферой, а клапан 2 перекрывает канал d, соединяющий ее с камерой b между дифференциальными поршнями распределительного плунжера 1. При этом плунжер вместе с золотником 9 в результате действия на его поршни неуравновешенного вследствие разности площадей давления в камере перемещается вправо (в положение, показанное на рис. 17), соединяя левую полость пневмоцилиндра б с каналом а питания. В результате шток пневмоцилиндра 6 возвратится в исходное положение, воздействуя в конце своего хода на выключатель 7. Далее цикл повторится.
На рис. 17, а представлена конструкция золотника с двусторонним пневматическим управлением прямого действия.
Плоский золотник 5 перемещается из одного крайнего положения в другое поршнями 1 и 4, общий шток 2 которых механически связан с золотником. К зеркалу корпуса 6 распределителя золотник 5 прижимается усилием пружины 3 и давлением воздуха в камере g, соединенной с каналом с питания.
Сжатый воздух подводится к каналу с и отводится в атмосферу через канал е. Перемещение золотника осуществляется давлением сжатого воздуха, подводимого поочередно в цилиндры двустороннего поршня от какого-либо источника через отверстия а и b.
В одном из крайних положений золотника 5 сжатый воздух проходит к отверстию 1, связанному с одной из полостей пневмоцилиндра, а отверстие d в это время сообщается с атмосферой. В другом крайнем положении золотника отверстие f сообщается с атмосферой, а отверстие d второй полости пневмопривода — с магистралью сжатого воздуха. Следовательно, отверстия f и d, соединенные с полостями силового пневмоцилиндра, сообщаются попеременно при перемещении золотника 5 либо с каналом питания, либо с атмосферой. Необходимо учесть, что золотник в этой схеме распределения будет нагружен давлением воздуха, действующим на всю омываемую им поверхность.
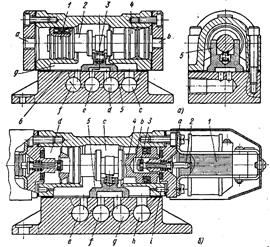
Рис. 17. Конструкция золотника с двусторонним управлением прямого действия
На рис. 17, б показана конструкция двухпозиционного четырехходового воздухораспределителя этого типа с двусторонним электропневматическим управлением. Сжатый воздух подводится к внутренней полости с воздухораспределителя через входное отверстие h и далее в зависимости от положения золотника 5 поступает к соответствующим каналам е или g, связанным с полостями пневмоцилиндра.
На рис. 17, б правый электромагнит 1 показан во включенном положении, а левый — в выключенном.
Якорь правого электромагнита, втягиваясь, нажимает на стержень 2 клапана управления, открывая затворы. Сжатый воздух из полости с через отверстие i малой площади сечения (дроссель) поступает в полости d и b под торцы поршня 4. При включенном правом электромагните стержень 3 вместе с резиновой прокладкой отодвигается влево, открывая выход сжатому воздуху из полости b через отверстие а в атмосферу. В результате давление воздуха в полости b падает, тогда как в полости d оно равно подводимому, ввиду чего поршень 4 с золотником 5 перемещается в правое положение. В этом положении золотника сжатый воздух из полости с поступает в отверстие е, а отверстие g сообщается с атмосферой через отверстие f. При этом поршень 4 кольцевым выступом (рыльцем) упирается в резиновую прокладку 6 и закрывает выход сжатому воздуху через отверстие а в атмосферу в течение всего времени, пока электромагнит включен.
При выключении правого электромагнита стержень (затвор клапана) 3 возвращается в исходное положение.
8. Электропневматический вентиль
В системах пневмоавтоматики применяются для дистанционного управления воздушными магистралями вентили (рис. 18), в которых проходные каналы закрываются и открываются конусными клапанами, управляемыми электромагнитом.
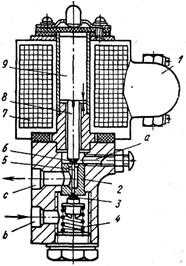
Рис.18. Схема электропневматического вентиля
При включении электротока, подводимого через клеммную коробку 1, якорь 9 перемещается вниз и с помощью толкателя 8 и клапана 6 перекрывает отверстие в верхнем седле клапана 2 и, одновременно нажимая через толкатель 5 на нижний клапан 3, открывает нижнее отверстие этого седла. При этом сжатый воздух, поступающий из магистрали в отверстие b, направляется через отверстие с к потребителю.
При обесточивании катушки 7 пружина 4 перемещает вверх нижний клапан 3, перекрывая поступление воздуха из магистрали. Одновременно с этим перемещается вверх верхний клапан 6, обеспечивая сброс через канал в седле клапана 2 и выпускное отверстие а воздуха из системы потребителя в атмосферу.
Заключение
В схемах автоматизации технологического оборудования термического производства используются самые различные приборы и аппаратура, завязанные в единую цепь управления работой.
Построение последовательности срабатывания механизмов оборудования строится на базе циклограммы работы и может быть последовательной, параллельной или комбинированной.
В связи с тем, что в термических цехах существует повышенная опасность возникновения пожаров из-за большого количества нагретого металла, в качестве энергоносителей используется электроэнергия и сжатый воздух. Применение гидравлики, работающей на минеральных маслах, сведено к минимуму по условиям пожароопасности.
Полностью автоматизированное оборудование выполняет весь цикл работ без участия обслуживающего персонала, роль которого сведена до роли наблюдателя за правильностью работы оборудования и течения технологического процесса.
Список использованной литературы
1. Автоматические регуляторы и следящие системы. Основы автоматического управления. Т. 3. под редакцией В. В. Солодовникова. М.: Машгиз, 1963.
2. Башта Т.М. Гидропривод и гидропневмоавтоматика. М. : Машиностроение, 1972.
3. Герц Е. В. Пневматические приводы. М.: Машиностроение, 1969.
4. Гамырин Н. С. Основы следящего привода. М., Оборонгиз. 1962.
5. Лемберг М. Д. Пневмоавтоматика. М. Госэнергоиздат, 1961.
6. Справочник машиностроителя, Т. 5/2 под ред. д.т.н. Э. А. Сатель. М.: Машиностроение, 1964.
Похожие рефераты:
Оборудование летательных аппаратов
Основные приборы и механизмы тягового электровоза
Разработка системы оперативно-диспетчерского контроля и управления канала
Тормозные механизмы автомобиля КамАЗ: ремонт и техническое обслуживание
Автоматизированная система управления компрессорной установки
Исследование процесса технической эксплуатации топливных форсунок системы распределённого впрыска
Проектирование отделения восстановительной электроплавки ильменитового концентрата
Разработка автоматизированного блока управления пневмокамерным насосом
Определение основных параметров и компоновка оборудования автономного локомотива
Организация поста технического обслуживания и ремонта карбюраторов двигателей легковых автомобилей
Вентиляция промышленного здания ООО Буинского комбикормового завода