| Похожие рефераты | Скачать .zip |
Дипломная работа: Модель тракта прослушивания гидроакустических сигналов
Уважаемая комиссия, вашему вниманию предоставляется квалификационная работа на тему «».
В данной работе, мне была дана задача
Разработать структуру тракта прослушивания гидроакустических сигналов на выходе сформированного пространственного канала (канала наблюдения) в тракте шумопеленгования с использованием многоэлементной антенной решетки;
разработать программный макет тракта прослушивания;
установить взаимосвязь основных параметров тракта прослушивания с базовыми параметрами тракта ШП;
с использованием программного макета выбрать параметры тракта прослушивания применительно к заданным в ТЗ на проект условиям.
В качестве многоканального датчика гидроакустичекой информации выбрана линейная эквидистантная антенная решетка, состоящая из 30 приемных элементов с межэлементным расстоянием d=0.1 метра.
Сектор обзора - ±45° относительно нормали к антенной решетке.
Частота дискретизации входных выборок fd=24000 Гц.
Частотные диапазоны прослушивания: I – (1-2.5) кГц;
II – (2-5) кГц;
III – (4-8) кГц.
Полоса пропускания усилителя тракта прослушивания (0.3-4.5) кГц.
Как известно тракт прослушивания является необходимой частью любой ГАС потомучто оператор должен иметь возможность прослушать сигнал и провести субьективную классификацию обьекта.
-большой корабль или малый;
-есть кавитация или нет;
-шум дизеля или иного механизма;
-число оборотов винтов и число лопастей винта;
-имеет ли место перекладка рулей;
-наблюдается ли пуск оружия;
Целью созданию данного тракта является то что ныне существующие ГАС ведут обработку информации в цифровой области и формирование канала наблюдения тоже ведется в цифровой области. При аналоговой системе никаких проблем не возникало но размеры комплекса аналогового типа были огромные, сейчас же с развитием цифровой техники размеры данной системы можно существенно сократить.
Задачей формирования канала наблюдения является сбор энергии по большой апертуре, с компенсацией задержки, возникшей на элементах АР при прохождении сигнала в среде. Это формирование можно делать и во временной области, но для получения хороших характеристик такого формирования частота дискретизации входных выборок должна быть очень большой (fd>>fв). Поэтому чаще процедуру формирования пространственного канала выполняют в частотной области, где частота дискретизации fd может быть лишь в 2.5-3 раза выше верхней частоты полосы обработки.
В данной работе мы будем заниматься системой формирование канала наблюдения в частотной области.
Формирование в частотной области основано на известном свойстве пр. Фурье . а именно в том что Спектр задержанного сигнала отличается от спектра исходного сигнала наличием фазового сдвига который зависит от частоты и от времени задержки.
Пусть
сигнал
![]() имеет непрерывный
спектр
имеет непрерывный
спектр
![]() ,
тогда задержанный
сигнал на время
t сигнал
S1(t)=
,
тогда задержанный
сигнал на время
t сигнал
S1(t)=![]() имеет
спектр
имеет
спектр
![]() ,
который на
каждой частоте
f отличается
от спектра
исходного
сигнала лишь
фазой, которая
пропорциональна
задержке t
и частоте f:
,
который на
каждой частоте
f отличается
от спектра
исходного
сигнала лишь
фазой, которая
пропорциональна
задержке t
и частоте f:
Таким
образом, для
компенсации
временных
задержек сигналов
на элементах
АР достаточно
вычислить
спектры сигналов
и умножить их
на каждой частоте
на
![]() .
Тогда для
формирования
ПК остается
сложить их.
.
Тогда для
формирования
ПК остается
сложить их.
Первая проблема
Процедура формирования в частотной области реализуется в режиме ШП с использованием алгоритма БПФ следующим образом. Поскольку режим ШП предназначен для обнаружения широкополосных непрерывных сигналов с неизвестным временем появления, то заранее указать временной интервал, в течение которого сигнал будет существовать, не представляется возможным. Поэтому вся входная информация – пространственно-временные выборки поля – нарезается на фрагменты фиксированной длительности и на этих фрагментах выполняются все процедуры первичной обработки (переход в частотную область, формирование ПК, диапазонная фильтрация и т.п.). Переход в частотную область выполняется с использованием процедуры БПФ, которая вычисляет дискретный спектр выборки конечной длины, циклически размноженной до бесконечности. Внесение задержек в частотной области эквивалентно сдвигу временной реализации, которая в случае использования БПФ означает циклический сдвиг реализаций.
Таким образом, при реализации ФХН в частотной области происходит циклический сдвиг реализаций на отдельных приемных элементах друг относительно друга. В результате после сдвига реализации на время τm и перевода сигнала во временную область в начале задержанного фрагмента появятся отсчеты из его конца или, наоборот, отсчеты из начала реализации окажутся в конце ее (в зависимости от знака вносимой задержки). Таким образом, как внутри задержанной реализации, так и на стыках соседних по времени фрагментов возникает разрыв фазы (восстановленного) сигнала. Поэтому в суммарном сигнале (на выходе процедуры ФХН) часть отчетов на краях реализации оказывается некорректной. Число этих отчетов напрямую зависит от максимальной временной задержки, вносимой при формировании ПК. Иллюстрация этого эффекта приведена нарисунке, где изображены реализации тонального сигнала (красная кривая), его задержанная во временной области на величину τ копия (черная линия) и она же, после внесения задержки τ в частотной области и перехода к временному представлению (зеленый пунктир). Видно, что восстановленная реализация на краю не соответствует исходной. Величина τ в этом случае положительная, но при формировании ПК в частотной области происходит сдвиг реализаций как на положительные, так и отрицательные τ.
Следует отметить, что подобные дефекты связаны со способом формирования ПК, а именно цифровым формированием в частотной области. Поскольку для тракта прослушивания и операторской классификации необходимо, чтобы выходная информация была непрерывной и не имела искажений, привнесенных обработкой, необходимо ввести так называемое перекрытие входных выборок сигнала и исключение некорректных отсчетов.
Для линейной АР величина перекрытия может быть вычислена по формуле:
N = tмах*fd, где
N – Величина перекрытия
tмах=(М-1)*d*sin(j)/c – максимальная задержка,
fd – частота дискретизации,
М – число приемных элементов линейной АР,
d – Межэлементное расстояние,
j - граница сектора обзора (от нормали к антенной решетке),
с – скорость звука в воде.
Для заданных в ТЗ на дипломную работу параметрах эта величина составляет: ~ 25%
Поэтому после перехода в частотную область необходимо компенсировать задержки умножив их на фазирующие коэффициенты и просуммировать .компенсировать в среде задержку и в результате получить M кратную копию исходного сигнала.
Но переход в частотную область осуществляется с использованием дискретного преобразования Фурье, которое циклически продолжает ограниченную временную последовательность на бесконечности .
В результате после внесения задержки реализация оказывается циклически сдвинутой и внутри ее возникают разрывы фазы, что и показано на рисунке.
Исходя из этого системой ШП как правило входные выборки берутся в обработку с перекрытием , некорректные отчеты должны быть выброшены из обработки , а для того чтоб сохранить непрерывность сигнала по входу они должны быть сдвинуты.
Вторая проблема
Вся обработка была показана во всей полосе сигнала. В реальной же системе формирование делается в узкой полосе частот, на следующем рисунке показано как вырезание прямоугольным фильтром будет влиять на восстановление сигнала,
(по заданию) предназначен для прослушивания сигналов в трех частотных диапазонах (шириной 1.5, 3 и 4 кГц),
Как видим, ИПХ такого фильтра не является ограниченной по времени, так что даже далекие по времени отсчеты, часть из которых, как было показано ранее, является некорректной, оказывают влияние на результат фильтрации. При этом чем шире вырезаемая полоса, тем отклик будет уже, и, следовательно, меньше требуемая величина перекрытия; чем уже полоса, тем большее перекрытие входных выборок следует вводить.Поэтому в тракте ШП необходимо предусмотреть фильтр с частотной характеристикой, отличной от прямоугольной. К импульсной переходной характеристике такого фильтра предъявляется следующее требование: ее уровень на далеких отчетах должен быть как можно меньше, чтобы уменьшить их влияние на восстановленный после вырезания полосы сигнал.
Таким образом, применение прямоугольного фильтра тоже искажает сигнала,
Чем уже прямоугольная характеристика в частотной области тем шире ее импульсная характеристика во временной, а для прямоугольного фильтра мы видим достаточно высокий уровень отчетов, таким образом, нужно подобрать такой фильтр которого импульсная переходная характеристика которого будет достаточно узкой и далекие от нулевого отчеты которого будут иметь низкий уровень. Например фильтр хана . и с применением нашего фильтра мы видим улучшение нашего спектра . но тем не менее часть отчетов должна быть исключена
Как видим, при этом уменьшаются амплитудные искажения в средней части реализации.
Как видно из рисунка 13 частотные окна, форма которых отлична от прямоугольной, вносят амплитудные искажения на краях полосы обработки. Для минимизации влияния использования частотных окон на уровень сигнала, с частотой, близкой к краям полосы обработки (0.3ч4.5) кГц, необходимо несколько расширить полосу фильтрации.
Дополнительно к тому что мы должны организовать перекрытие с учетом максимальной задержки мы еще должны предусмотреть фильтр.
Третья проблема
При проектирование тракта прослушивания возникает в результате того что человеческое ухо слышит от 0.3 до 4-5 кГц , а наш сигнал может быть более высокочастотным есть необходимость осуществить перенос частот в область низких частот . так как оператору сложно слушать на высоких шумы,
В результате проведенного моделирования было установлено, что сдвигать можно не на произвольное количество спектральных отчетов и более того, не при произвольной величине перекрытия. Следующие рисунки иллюстрируют этот эффектВот что мы получили . то же самое получается если мы сдвигаем на 5 спектр отчетов тоже плохо
И также в результате проведенного моделирования установлено, что осуществить сдвиг частот без потери качества прослушивания можно только в случае, если величина перекрытия входных выборок является делителем числа n - базы БПФ. При этом сдвинуть на один спектральный отсчет или на нечетное число отсчетов нельзя ни при какой величине перекрытия, иначе происходят искажения и нестыковки последовательных фрагментов восстановленного сигнала.
В таблицу 1 сведены полученные в результате проведенного моделирования данные о соотношении величины перекрытия входных выборок и числа спектральных отсчетов, на которые можно сдвигать (понижать или повышать) полосу сигнала.
На основании вышеизложенного, можно сделать выводы о том, что для устранения эффектов, вызванных появлением некорректных отсчетов при формировании канала наблюдения в частотной области и не во всей полосе, а в ограниченной полосе, необходимо:
- обязательное исключение части отчетов в восстановленной реализации сигнала
из дальнейшей обработки;
- применение частотного фильтра с ЧХ, отличной от прямоугольной;
- расширение полосы обработки.
При этом величина перекрытия входных выборок должна быть больше суммы максимальной задержки сигнала на элементах АР и длительности ИПХ частотного фильтра. Других ограничений на величину перекрытия не накладывается.
В тоже время бала выбрана величина перекрытия N/4 и при такой величине удалось подобрать полосу при которой сигнал восстанавливается хорошо .
Для решения обозначенных проблем и выбора параметров алгоритма была разработана модель тракта прослушивания, в которой выполняется необходимо установить связь основных параметров .
Программный макет тракта прослушивания включает в себя следующие функциональные блоки:
Блок задания параметров антенной решетки и параметров цифровой обработки в тракте ШП.
Задаются основные параметры системы, включая:
- Скорость звука,
- Частота дискретизации,
- Задание мнимой единицы,
- Количество элементов АР,
- Шаг между приемными элементами АР,
- длительность формируемого сигнала,
-Количество частотных диапазонов,
-Число точек БПФ,
- величина перекрытия входных выборок,
-Нижняя полоса и верхняя полоса всего тракта, и разбивка на 3 диапазона.
Блок задания параметров сигнала и параметров обработки в тракте прослушивания.
В этом блоке происходит выбор типа сигнала:
-тональный,
-амплитудно-модулированный тональный,
- амплитудно-модулированный шумовой;
Задаются:
- несущая частота сигнала,
-частота модуляции,
-глубина модуляции,
-число тактов обработки,
-частотный диапазон прослушивания,
-угол падения фронта волны на элементы АР,
- частотный сдвиг для выбранного ЧД,
- степень расширения полосы частот (количество отсчетов),
- спектральное окно.
Формирование процессов на выходе приемных элементов АР. Имитационное моделирование входного процесса включает в себя задание моделей полей сигнала, формирование временной реализации сигнала, фильтрацию ее в заданном диапазоне частот, формирование плоского фронта сигнала на элементах АР.
Перечень процедур, проводимых в этом функциональном блоке:
расчет координат приемных элементов в АР,
формирование сигнала заданной частоты в поле,
расчет временных задержек фронта волны сигнала исходя из направления его прихода,
формирование дискретизированных с частотой fd=24000Гц сигналов на приемных элементах АР.
Функциональные программы расчета выходного эффекта тракта прослушивания:
Последовательный набор по n временных отсчетов сигналов на элементах АР с перекрытием 25% - так называемый такт обработки;
Дальнейшие процедуры выполняются на каждом такте обработки:
Переход в частотную область с использованием процедуры БПФ;
Формирование ПК на частотах рабочей полосы;
Вырезание полосы частот выбранного частотного диапазона (ЧД);
Сдвиг полосы частот на заранее рассчитанное для каждого ЧД число спектральных отсчетов;
Умножение отсчетов спектра сформированного канала на спектральное окно;
Восстановление сигнала во временной области (процедура обратного ПФ);
Отбрасывание некорректных отчетов из реализации – по n/8 отсчетов в начале и в конце реализации;
набор реализации большой длительности.
6. Выдача сигнала на ЦАП, вычисление спектра сигнала с высоким разрешением по частоте, графическое представление результатов обработки.
Сформированный указанным выше способом сигнал на элементах антенны «нарезается» на временные фрагменты длиной n=512 точек с учетом перекрытия, которое вводится в модель тракта как параметр. Каждый фрагмент подвергается процедуре БПФ, в результате чего получаются спектры процессов на выходе приемных элементов. Из получившегося набора частот в дальнейшую обработку берутся только номера частот fk, соответствующие заданной полосе обработки (fнчfв).
Как было показано выше, вырезание полосы фильтром с прямоугольной частотной характеристикой вносит дополнительные искажения в восстановленный сигнал. Поэтому в модели предусмотрено расширение полосы обработки от значения (0,3-4,5) кГц до (0,05-5) кГц.
На следующем этапе происходит формирование канала наблюдения в частотной области путем сложения спектров реализаций с приемных элементов АР, умноженных на заранее рассчитанные фазирующие коэффициенты на это направление.
После ФХН выполняется вырезание полосы частот выбранного частотного диапазона и сдвиг ее на заранее рассчитанное для каждого ЧД число спектральных отсчетов. Затем проводится процедура ОБПФ, на выходе которой получаем временную реализацию. Как было показано ранее, для устранения эффектов, вызванных вырезанием полосы частот, необходимо перед восстановлением сигнала во временную область ввести частотное окно, вид которого в модели можно выбирать из заранее созданных файлов либо из имеющегося в системе MatLab банка частотных фильтров, а также задавать их параметры. В модели тракта прослушивания параллельно формируются и обрабатываются сигналы, восстановленные с применением частотного окна и без него.
Восстановленный сигнал содержит в себе некорректные отсчеты. Фазирующие коэффициенты, используемые при формировании веера пространственных каналов, таковы, что длительность “испорченных” фрагментов реализации в начале и в конце ее приблизительно одинакова. Поэтому из реализации исключаются некорректные отсчеты в начале и в конце кусочка реализации длиной n отсчетов.
Для сокращения времени моделирования, а также экономии внутренней памяти MatLab сигнал на приемных элементах АР моделируется на ограниченном временном интервале, причем длина этого интервала должна быть достаточной для формирования оценки спектральной плотности мощности процесса с требуемым частотным разрешением. Длина такой реализации в программе определяется автоматически с учетом необходимого количества точек перекрытия и количества точек.
Рассчитывать коэффициент сдвига будем проводить по формуле
![]()
Где
![]() нижнее
значение частотного
диапазона,
нижнее
значение частотного
диапазона,
![]() =
коэффициент
фильтра,
=
коэффициент
фильтра,![]() -
число сдвига
спектральных
отсчетов.
-
число сдвига
спектральных
отсчетов.
7 – коэффициент минимальной частоты переноса спектра = 300 ГЦ
В результате работы программы мы получаем следующие результаты
Как видно из финальных плакатов разработанная и смоделированная структура работает что подтверждают графики . для первого диапазона на частоте 2000Гц , установлена взаимосвязь основных параметров тракта прослушивания с базовыми параметрами тракта ШП.
В результате смоделированной ситуации сигнал собранный с элементов АР и задержанный проходит стадию вырезания полосы и сдвига частоты без каких либо помех что подтверждают графики. Так же мы здесь видим имп.пер.хар. фильтра созданного специально для данного частотного диапазона и внешний вид фильтра.
То же самое мы видим и для других Частотных диапазонов на плакатах 2 и 3 .
Доклад окончен
Тема: Модель тракта прослушивания гидроакустических сигналов
Оглавление
Введение
Место тракта прослушивания в структуре режима ШП типовой ГАС
Формирование канала наблюдения в частотной области
3 Факторы, влияющие на восстановление сигнала
3.1 Перекрытие входных выборок в тракте прослушивания
3.2 Сужение полосы частот восстановленного сигнала
3.3 Частотный сдвиг при понижении полосы частот прослушивания
4 Программный макет тракта прослушивания
4.1 Структурная схема алгоритма обработки в тракте прослушивания
4.2 Структурная схема программного макета тракта прослушивания
4.3 Расчет выходных эффектов тракта
5 Результаты расчетов
Приложение 1. Текст программы в Matlab
Заключение
Список литературы
Введение
К одной из важнейших научно-технических проблем современности можно отнести освоение водного пространства.
Освоение океана повлекло множество технических проблем. Одной из них являлась невозможность заглянуть в глубины океана, узнать особенности дна, наличие и особенности подводных обитателей. С появлением судов и устройств, способных пребывать под водой более или менее долго, возникла проблема передачи информации: связь с другими объектами, сканирование окружающего пространства и прочее.
Акустические (звуковые) волны, благодаря своей природе, свойствам водной среды, способны возбуждаться при сравнительно малых затратах энергии, и распространяться на большие расстояния, при некоторых условиях на тысячи и десятки тысячи километров.
С помощью гидроакустических средств (ГАС) производят картографирование дна морей и океанов, обнаруживают предметы (эхолоты и гидролокаторы бокового обзора), осуществляют водную связь (средства гидроакустической связи), обеспечивают безопасность плавания судов, измерение скорости хода и глубины под килем (средство судовождения), производят поиск скопления рыб, управление автономными подводными приборами, доставляющими информацию о состоянии подводной обстановки (средств телеметрии и телеуправления), обнаруживают и определяют координаты подводных объектов.
Процесс преобразования акустической энергии в электрическую (и наоборот) выполняют подводные электроакустические приёмники и излучатели, входящие в состав антенны, и называемые гидроакустическими преобразователями (ГАП).
Конструкцию антенны определяют, в основном, её назначение и местоположение. Так, антенны судовых гидроакустических систем можно размещать на корпусе судна, буксировать или опускать за борт; антенны стационарных гидроакустических станций устанавливают на фундаментальных опорах в прибрежных районах, у входов в порты, в районах рейдовых стоянок и т.п.
Техническими параметрами гидролокационных станций (ГАС) являются: рабочая частота (от единицы до десятков килогерц), излучаемая акустическая мощность (от сотен ватт до сотен киловатт), ширина диаграммы направленности антенны в режимах излучения и приема в главных плоскостях, форма и длительность излучаемых импульсов, уровень усиления приемного тракта, ширина полосы частот приемного тракта. Техническими параметрами ГАС, которые не излучают акустическую энергию и предназначены для обнаружения и определения пеленга (курсового угла) подводного объекта по производимому им шуму, в частности движущегося судна (пассивные средства ШПС), являются: полоса рабочих частот, ширина диаграммы направленности антенны, коэффициент усиления приемного тракта.
С начала развития подводного флота тракт прослушивания являлся неотъемлемым и единственным средством обнаружения и классификации сигналов. Первоначально этот тракт состоял из одиночных приемников, которые размещались с левого и правого борта, либо где-то в носу судна. Это были одиночные приемники и все сигналы, которые поступали на вход этих приемников, оператор имел возможность прослушать. И по разности прихода сигнала с разных гидрофонов оператор определял, с какого борта идет цель. Тракт прослушивания существует столько же, сколько существует и подводное плавание, так как есть необходимость прослушивать сигналы, обнаруживать, откуда они пришли, и определять, что это за цель, противник либо безопасный объект. Несмотря на наличие в современных ГАС режима объективной классификации, значение тракта прослушивания так же велико. Гидроакустики во время поиска объекта хотят иметь возможность самостоятельно прослушивать сигнал и чаще всего именно они и оценивают параметры цели.
Таким образом, во всех ТЗ на ГАС и ГАК обязательно присутствует требование о наличии тракта прослушивания сигналов и помех с любого направления в заданном секторе обзора ГАС.
К числу основных задач, решаемых гидроакустическими средствами подводных лодок (ПЛ) при освещении окружающей обстановки, относится освещение подводной, надводной и воздушной обстановки в интересах самообороны ПЛ. Для наблюдения за морскими целями ПЛ должна обладать мощным гидроакустическим комплексом, работающим преимущественно в пассивных режимах (шумопеленгование, обнаружение гидроакустических сигналов - ОГС).
При наблюдении за ПЛ ПЛО возникает дуэльная ситуация “ПЛ против ПЛ”, выигрыш в которой определяется соотношением комплекса параметров противоборствующих ПЛ и их гидроакустических комплексов (ГАК): акустическая шумность ПЛ, уровень корабельных акустических помех работе собственного ГАК, энергетический потенциал ГАК, совершенство цифрового вычислительного комплекса ГАК, в том числе алгоритмов и программного обеспечения.
В большинстве современных ГАС и ГАК цифровая обработка информации, принятой антенной решеткой, осуществляется в частотной области. Это, как будет показано в работе, приводит к необходимости уточнения алгоритма обработки в канала прослушивания и согласования параметров этого алгоритма и базовых параметров режима шумопеленгования.
Целью дипломного проектирования является разработка тракта прослушивания для ГАС обнаружения гидроакустических сигналов по их шумоизлучению в звуковом диапазоне частот. Тракт обнаружения проектируется для работы в трех частотных диапазонах, рассчитанных под обнаружение целей на различных дальностях, при этом необходимо обеспечить наилучшие условия для прослушивания сигнала цели для каждого из трех частотных диапазонов. Поскольку, как известно, человеческое ухо наилучшим образом воспринимает частоты в полосе от ~300 Гц до 3-4 кГц, возникает задача понижать частоту прослушивания, то есть нужно выделить (вырезать) требуемую частотную полосу и перенести ее (гетеродинировать) в область частот, наиболее комфортную для оператора.
В данной работе требуется:
Разработать структуру тракта прослушивания гидроакустических сигналов на выходе сформированного пространственного канала (канала наблюдения) в тракте шумопеленгования с использованием многоэлементной антенной решетки;
разработать программный макет тракта прослушивания;
установить взаимосвязь основных параметров тракта прослушивания с базовыми параметрами тракта ШП;
с использованием программного макета выбрать параметры тракта прослушивания применительно к заданным в ТЗ на проект условиям.
В качестве многоканального датчика гидроакустичекой информации выбрана линейная эквидистантная антенная решетка, состоящая из 30 приемных элементов с межэлементным расстоянием d=0.1 метра.
Сектор обзора - ±45° относительно нормали к антенной решетке.
Частота дискретизации входных выборок fd=24000 Гц.
Частотные диапазоны прослушивания: I – (1-2.5) кГц;
II – (2-5) кГц;
III – (4-8) кГц.
Полоса пропускания усилителя тракта прослушивания (0.3-4.5) кГц.
1 Место тракта прослушивания в структуре режима ШП типовой ГАС
Обобщенная структурная схема ГАС шумопеленгования представлена на рисунке 1.
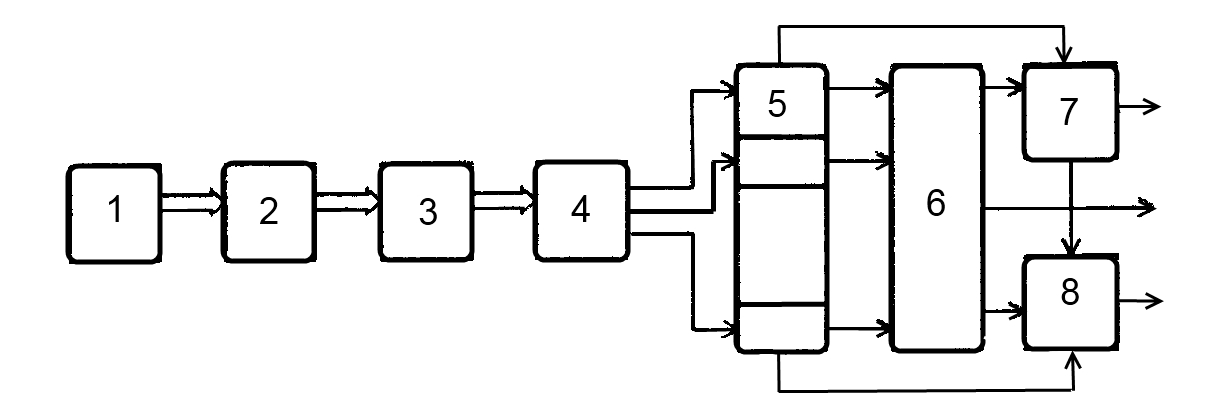
Рис.1 Структурная схема ГАС шумопеленгования аналогового типа
антенное устройство, содержащее несколько гидрофонов.
предварительный широкополосный усилитель.
устройство формирования характеристик направленности, технически выполняемое в виде линий задержки и сумматоров.
основные усилители и частотные фильтры
детекторы с интеграторами
пороговые устройства
устройство измерения угловых координат
устройство вторичной обработки информации
Непрерывные электрические сигналы от элементов АР поступают на вход аппаратуры предварительной обработки (АПО), основными функциональными узлами которой являются предварительные усилители (ПУ) и диапазонные фильтры (ДФ). С точки зрения системного построения ГАС, АПО разбивается на ряд отдельных трактов, при этом каждой антенной решетке или группе однородных антенных решеток соответствует свой тракт. В отдельных случаях в состав АПО включают устройства формирования характеристик направленности на базе аналоговых или дискретно-аналоговых линий задержки, то есть элементы, относящиеся к первичной обработке.
При аналоговом формировании канала наблюдения проблем с организацией по его выходу прослушивания не возникало, поскольку вся обработка выполнялась во временной области. Однако аналоговое формирование статического веера пространственных каналов, выполняемое на антеннах больших размеров в широком диапазоне углов, представляет собой довольно сложную техническую задачу. Поэтому, начиная с 70-х годов 20 века, в связи с бурным развитием цифровой техники обработка гидроакустической информации от многоэлементных АР ведется в цифровой области.
В этом случае дискретные по пространству (принятые дискретной АР) процессы с выхода АПО подвергаются дискретизации с помощью аналого-цифровых преобразователей (АЦП) и поступают на вход ЦВК, где реализуются алгоритмы первичной и вторичной цифровой обработки сигналов.
Система первичной или пространственно-временной обработки сигналов (СПВО), подключенная к выходам каналов предварительной обработки сигналов, решает задачи максимизации ОСП, порогового обнаружения полезных сигналов и определения угловых координат их источников с последующей выдачей информации в систему вторичной обработки. Процессоры СПВО выполняют две основные функции:
- пространственную фильтрацию сигналов (формирование ХН антенной решетки);
- временную обработку сигналов (спектральный анализ и оценивание).
По результатам первичной обработки устанавливается факт наличия полезного сигнала в поступающей на вход ГАС смеси сигнала и помехи, т.е. осуществляется обнаружение цели.
Сопровождение обнаруженных целей по углу с точным измерением текущего пеленга и ВИП в интересах целеуказания оружию осуществляется системой АСЦ.
Система вторичной обработки оперирует уже не с сигналами, принятыми антенной ГАС, а с формализованной информацией о фактах обнаружения сигналов, превысивших порог, а также о параметрах сигналов. К числу основных задач, решаемых аппаратурой вторичной обработки информации, относятся: классификация целей, определение их координат и параметров движения, формирование трасс движения целей и их анализ. В системах вторичной обработки накапливается информация от всех подсистем ГАК, в связи с чем возникает задача комплексной обработки данных. Аппаратура вторичной обработки должна подготовить данные для индикации их на дисплеях системы отображения, регистрации, документирования и управления (СОРДиУ).
К категории наиболее сложных задач вторичной обработки информации в ГАК относится задача классификации целей – одна из проблем, информация о которых (методы, алгоритмы, средства решения), считается наиболее конфиденциальной. Классификация представляет собой одну из наиболее сложных и длительных процедур, требующих значительных усилий от оператора-гидроакустика и мощной вычислительной поддержки.
При классификации в режиме ШП процедура начинается при малых отношениях сигнал/помеха и продолжается в течение всех последующих этапов наблюдения за обстановкой. По мере сближения с целью и увеличения ОСП появляется возможность отнести обнаруженную цель к одному из следующих классов: торговое судно, военный корабль, ПЛ, торпеда, сформированная средствами ГПД ложная цель; шумы портов, гаваней, плавучих платформ; морские животные.
Различают субъективную классификацию, осуществляемую оператором-гидроакустиком при больших отношениях сигнал/помеха, и объективную автоматизированную классификацию с помощью средств ЦВТ. В современных ГАК несмотря на оснащение их мощными ЦВК с развитым алгоритмическим и программным обеспечением до сего времени сохранился тракт прослушивания. С его помощью опытный оператор-гидроакустик после обнаружения сигнала может дать ответ на следующие вопросы:
-большой корабль или малый;
-есть кавитация или нет;
-шум дизеля или иного механизма;
-число оборотов винтов и число лопастей винта;
-имеет ли место перекладка рулей;
-наблюдается ли пуск оружия;
-не обусловлен ли наблюдаемый сигнал использованием средств ГПД;
-не имеет ли обнаруженный сигнал биологическую или сейсмическую природу;
-как ведет себя цель;
-насколько велик уровень сигнала и в скольких ХН он наблюдается.
Кроме того, на основании наблюдаемого значения ВИП (величина изменения пеленга) оператор может определить дополнительно:
-близко либо далеко находится цель;
-закономерно ли себя ведет пеленг на цель;
может ли цель идти так быстро или так медленно.
Структурная схема режима ШП типовой ГАС цифрового типа представлена на рисунке 2.
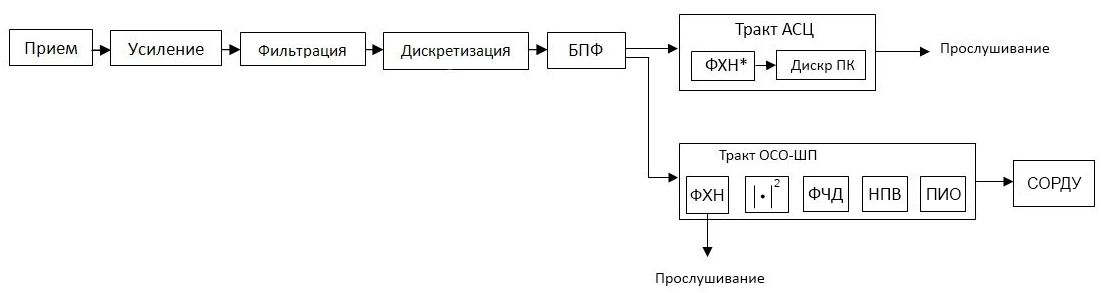
Рис 2. Структура режима ШП типовой ГАС цифрового типа
Тракт АСЦ (тракт автоматического сопровождения цели) содержит:
- блок формирования двух диаграмм направленности по половинам апертурного окна;
- Дискриминатор угла, вырабатывающий оценку рассогласования между углом наведения тракта АСЦ и углом прихода сигнала;
- Сглаживающий фильтр с поправками на крен и дифферент;
- блок формирования суммарного канала в частотной области.
Информация с выхода тракта АСЦ поступает в тракт прослушивания и в систему классификации.
В тракте одновременного секторного обзора для обнаружения широкополосных сигналов (ОСО – ШП) выполняется:
- формирование веера каналов наблюдения (пространственных каналов – ПК);
- квадратичное детектирование;
- формирование частотных диапазонов;
- накопления по времени;
- предындикаторная обработка.
Информация с одного из выходов системы формирования веера каналов наблюдения тракта ОСО-ШП также может поступать в тракт прослушивания.
Таким образом, оператор может выбирать, какой сигнал слушать: тракта АСЦ или тракта ОСО-ШП.
Общая структура обработки сигнала в тракте прослушивания представлена на рисунке 3

Рис. 3 Общая структура обработки сигнала в тракте прослушивания
-Аналого-цифровой преобразователь
-Быстрое преобразование Фурье
-Формирование Характеристик направленности
-Сдвиг полосы частот
-Обратное быстрое преобразование Фурье
-Стыковка реализаций
-Цифро-аналоговое преобразование
В реальном тракте структура дополняется блоками : предварительный усилитель , диапазонный фильтр и другие.
2 Формирование канала наблюдения в частотной области
Задачей формирования канала наблюдения является сбор энергии по большой апертуре, с компенсацией задержки, возникшей на элементах АР при прохождении сигнала в среде. Это формирование можно делать и во временной области, но для получения хороших характеристик такого формирования частота дискретизации входных выборок должна быть очень большой (fd>>fв). Поэтому чаще процедуру формирования пространственного канала выполняют в частотной области, где частота дискретизации fd может быть лишь в 2.5-3 раза выше верхней частоты полосы обработки.
Основана эта процедура на следующем свойстве преобразования Фурье.
Пусть
сигнал
![]() имеет непрерывный
спектр
имеет непрерывный
спектр
![]() ,
тогда задержанный
сигнал на время
t
сигнал S1(t)=
,
тогда задержанный
сигнал на время
t
сигнал S1(t)=![]() имеет
спектр
имеет
спектр
![]() ,
который на
каждой частоте
f
отличается
от спектра
исходного
сигнала лишь
фазой, которая
пропорциональна
задержке t
и
частоте f:
,
который на
каждой частоте
f
отличается
от спектра
исходного
сигнала лишь
фазой, которая
пропорциональна
задержке t
и
частоте f:
 .
.
Таким
образом, для
компенсации
временных
задержек сигналов
на элементах
АР достаточно
вычислить
спектры сигналов
и умножить их
на каждой частоте
на
![]() .
Тогда для
формирования
ПК остается
сложить их:
.
Тогда для
формирования
ПК остается
сложить их:
 ,
,
получив М-кратную копию спектра исходного сигнала.
Расчет
задержек
![]() прихода фронта
волны сигнала,
приходящего
с направления,
определяемого
углами (j,q)
в сферической
системе координат,
на элементы
АР возникающих
проводим по
формуле :
прихода фронта
волны сигнала,
приходящего
с направления,
определяемого
углами (j,q)
в сферической
системе координат,
на элементы
АР возникающих
проводим по
формуле :

![]()
![]()
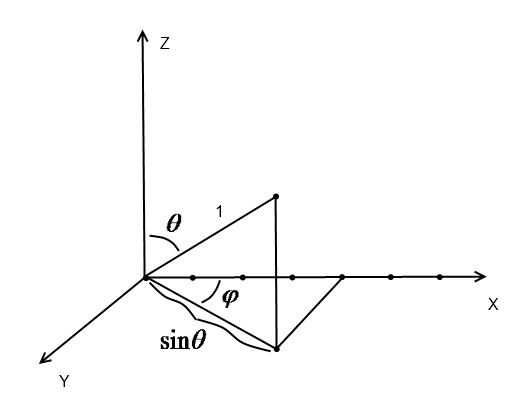
Рис. 4 Координаты элементов АР
![]()
![]()
Где
![]() – направляющая
косинуса нормали
к фронту волны.
– направляющая
косинуса нормали
к фронту волны.
Зависит от плоского фронта сигнала и координат приемных элементов АР.
По исходным данным мы строим плотный веер ХН для сигнала приходящего с известного нам направления.
Реализация
алгоритма
обнаружения
широкополосного
сигнала предполагает
фазирование
АР в широкой
полосе частот.
На практике
ширина полосы
обработки
иногда составляет
2-3 октавы и более.
Направление
фазирования
осей ХН принадлежат
секторы обзора
(α–r,
αr)
, в котором
формируется
2R+1
пространственных
канала с шагом
по углу
![]()
![]()
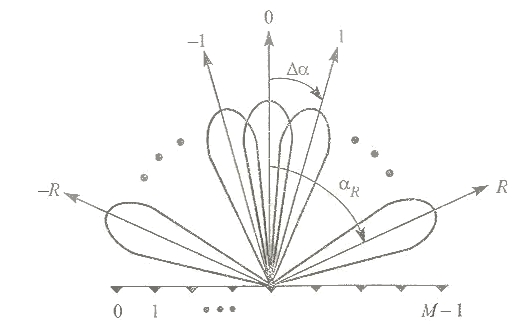
Рис.5 Веер ХН на линейной АР
Алгоритм
фазирования
АР на направлении
![]() ,
,![]() ,
и алгоритм
формирования
ХН имеет вид
:
,
и алгоритм
формирования
ХН имеет вид
:
В пространственно - частотной области:

где
выходные величины
![]() вычисляются
на всех частотах
вычисляются
на всех частотах
![]() из
полосы обработки
из
полосы обработки
![]() .
.
Далее мы будем работать с одним направлением в секторе обзора, с которого у оператора может возникнуть желание прослушать сигнал.
3 Факторы влияющие на восстановление сигнала
3.1 Перекрытие входных выборок в тракте прослушивания
Процедура формирования в частотной области, описанная в предыдущем разделе, реализуется в режиме ШП с использованием алгоритма БПФ следующим образом. Поскольку режим ШП предназначен для обнаружения широкополосных непрерывных сигналов с неизвестным временем появления, то заранее указать временной интервал, в течение которого сигнал будет существовать, не представляется возможным. Поэтому вся входная информация – пространственно-временные выборки поля – нарезается на фрагменты фиксированной длительности и на этих фрагментах выполняются все процедуры первичной обработки (переход в частотную область, формирование ПК, диапазонная фильтрация и т.п.). Переход в частотную область выполняется с использованием процедуры БПФ, которая вычисляет дискретный спектр выборки конечной длины, циклически размноженной до бесконечности. Внесение задержек в частотной области эквивалентно сдвигу временной реализации, которая в случае использования БПФ означает циклический сдвиг реализаций.
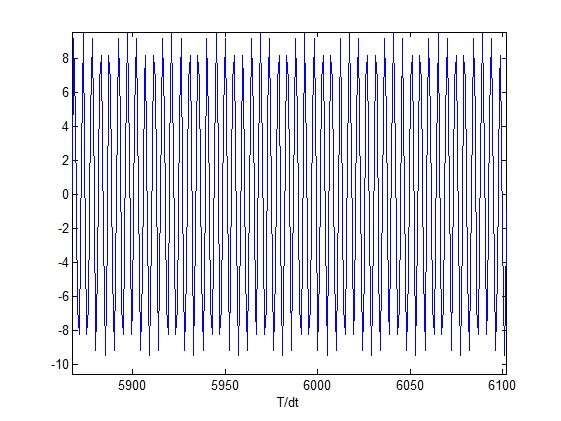
Таким образом, при реализации ФХН в частотной области происходит циклический сдвиг реализаций на отдельных приемных элементах друг относительно друга. В результате после сдвига реализации на время τm и перевода сигнала во временную область в начале задержанного фрагмента появятся отсчеты из его конца или, наоборот, отсчеты из начала реализации окажутся в конце ее (в зависимости от знака вносимой задержки). Таким образом, как внутри задержанной реализации, так и на стыках соседних по времени фрагментов возникает разрыв фазы (восстановленного) сигнала. Поэтому в суммарном сигнале (на выходе процедуры ФХН) часть отчетов на краях реализации оказывается некорректной. Число этих отчетов напрямую зависит от максимальной временной задержки, вносимой при формировании ПК. Иллюстрация этого эффекта приведена на рис.6, где изображены реализации тонального сигнала (красная кривая), его задержанная во временной области на величину τ копия (черная линия) и она же, после внесения задержки τ в частотной области и перехода к временному представлению (зеленый пунктир).
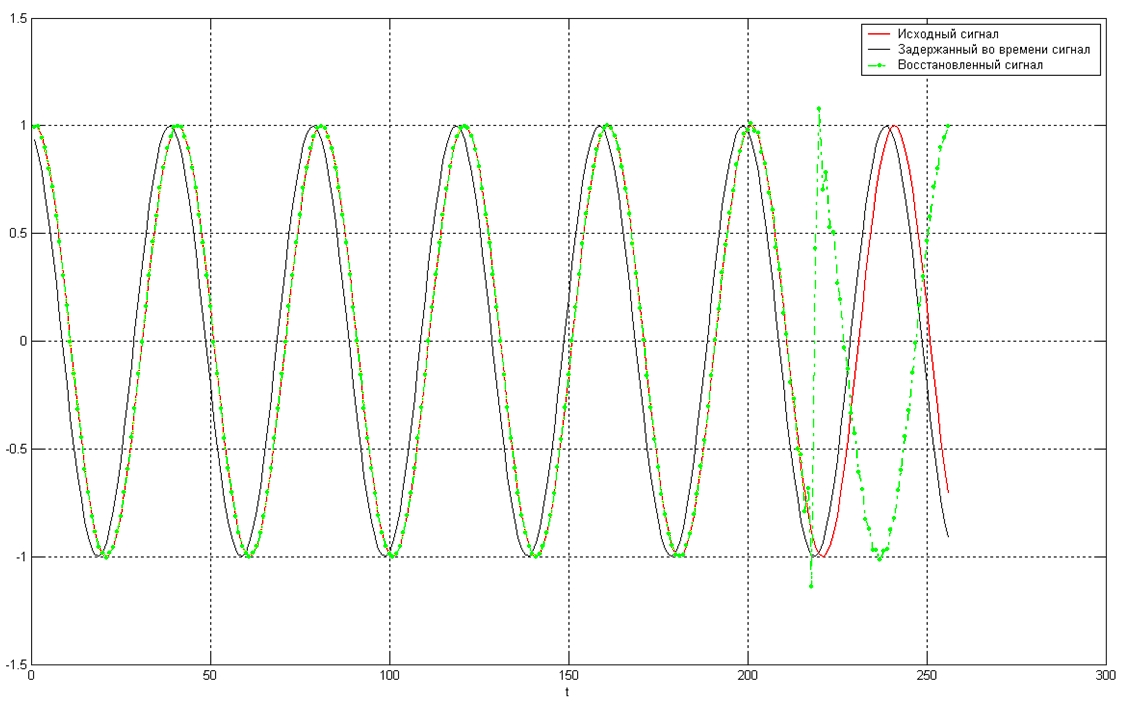
Рис. 6 Иллюстрация эффекта, возникающего при восстановлении сигнала после ФХН в частотной области
Видно, что восстановленная реализация на краю не соответствует исходной. Величина τ в этом случае положительная, но при формировании ПК в частотной области происходит сдвиг реализаций как на положительные, так и отрицательные τ.
На рисунках 7а и 7б приведены: исходный сигнал во временной области и его спектр, на рисунках 8а и 8б: сигнал, полученный в результате стыковки фрагментов восстановленного сигнала после внесения задержек в частотной области, а также его спектр. Как видно из графиков, при внесении задержки на краях реализаций появляются нестыковки, что приводит к искажению спектра сигнала.
Очевидно, что из дальнейшей обработки необходимо убирать некорректные отсчеты как в начале реализации, так и в конце ее, чтобы не зависеть от величины задержки сигнала.
Следует отметить, что подобные дефекты связаны со способом формирования ПК, а именно цифровым формированием в частотной области. Поскольку для тракта прослушивания и операторской классификации необходимо, чтобы выходная информация была непрерывной и не имела искажений, привнесенных обработкой, необходимо ввести так называемое перекрытие входных выборок сигнала и исключение некорректных отсчетов.
Рис. 7а Исходный сигнал во временной области
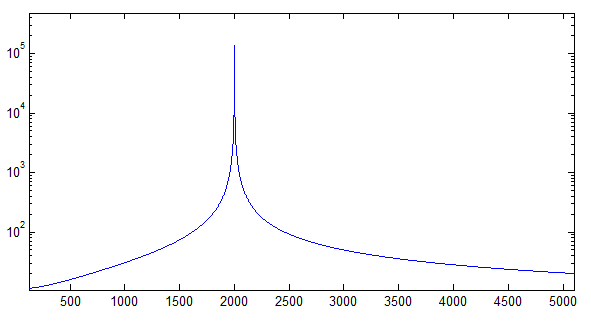
Рис. 7б Спектр исходного сигнала
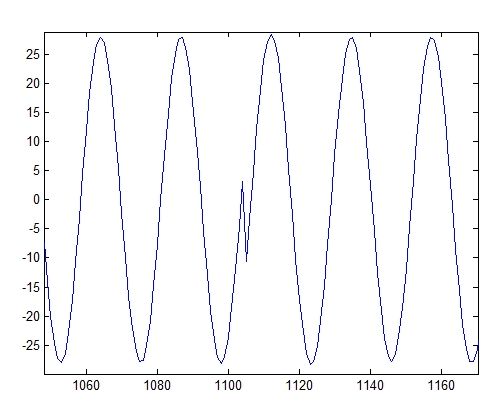
Рис. 8а Стыковка восстановленных во временную области фрагментов сигнала на выходе сформированного канала (без отбрасывания некорректных отсчетов)
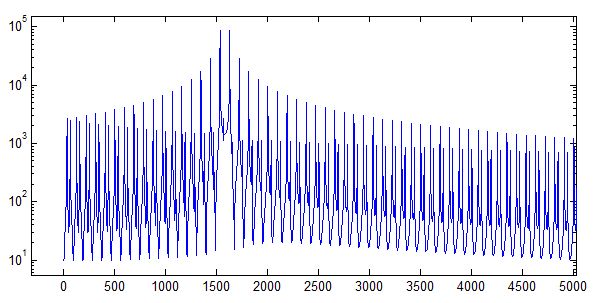
Рис. 8б Спектр восстановленного сигнала (стыковка без исключения некорректных отсчетов)
Величина перекрытия входных выборок должна быть не меньше максимальной задержки между любыми 2-мя приемными элементами, возникающей при приходе сигнала с любого направления в заданном секторе обзора режима ШП.
Для линейной АР величина перекрытия может быть вычислена по формуле:
N = tмах*fd, где
N – Величина перекрытия
tмах=(М-1)*d*sin(j)/c – максимальная задержка,
fd – частота дискретизации,
М – число приемных элементов линейной АР,
d – Межэлементное расстояние,
j - граница сектора обзора (от нормали к антенной решетке),
с – скорость звука в воде.
Для заданных в ТЗ на дипломную работу параметрах эта величина составляет: ~ 25%
3.2 Сужение полосы частот восстановленного сигнала
Приведенные в предыдущем разделе рисунки соответствует восстановлению сигнала во всей полосе (|ΔF|=fd/2). Реальные сигналы на входе тракта ШП после усиления и фильтрации имеют ограниченную полосу, тракт прослушивания (по заданию) предназначен для прослушивания сигналов в трех частотных диапазонах (шириной 1.5, 3 и 4 кГц), что также влияет на качество восстановленного сигнала. На рисунке 9 изображены входной сигнал (черная пунктирная линия) и восстановленный после вырезания требуемой полосы прямоугольным окном в частотной области (синяя кривая).
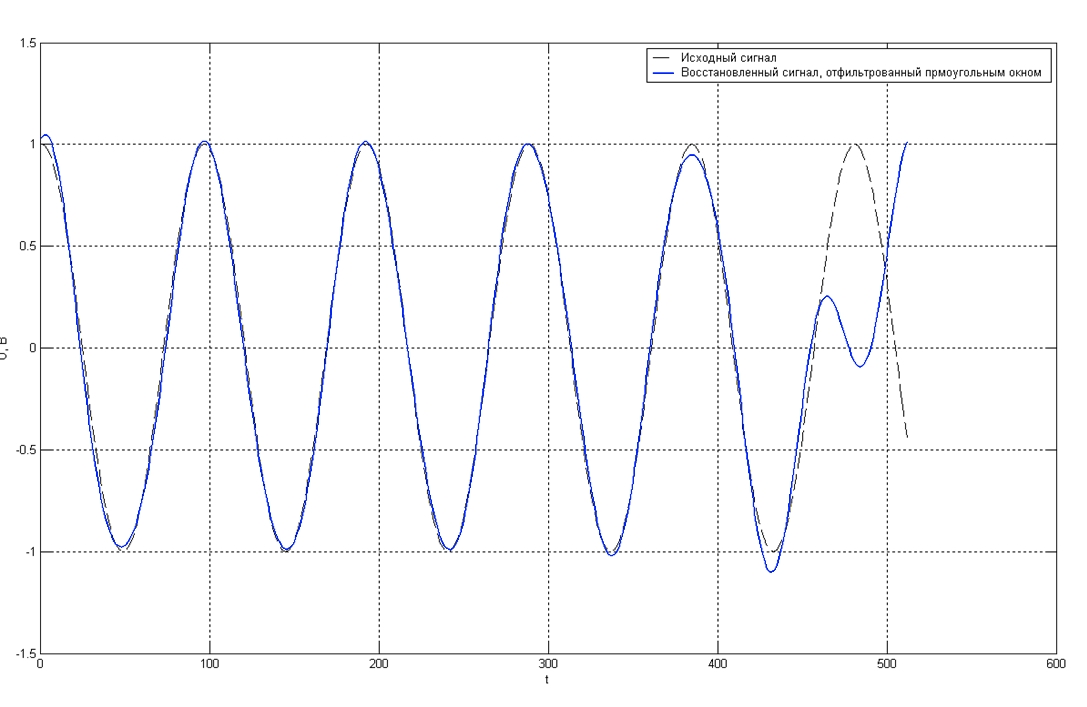
Рис. 9 Иллюстрация эффекта, возникающего при вырезании полосы фильтром с прямоугольной ЧХ
Как видно из рисунков, вырезание полосы фильтром с прямоугольной частотной характеристикой искажает амплитуду восстановленного сигнала.
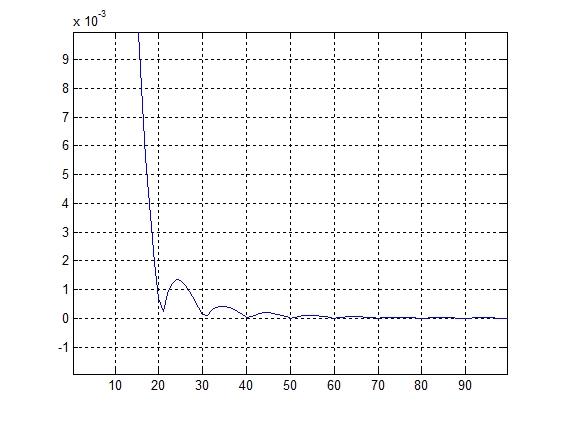
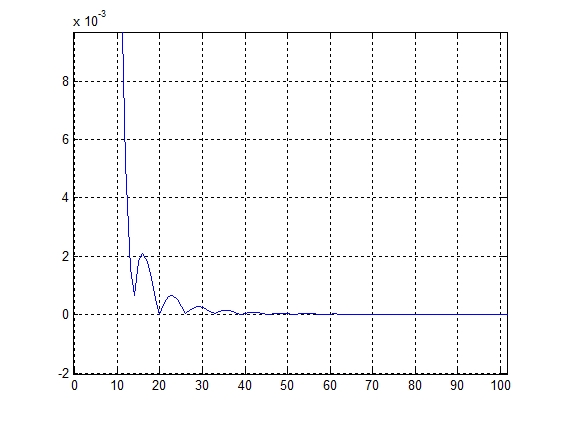
На рисунке 10 приведена импульсная переходная характеристика (ИПХ) фильтра с прямоугольной частотной характеристикой.
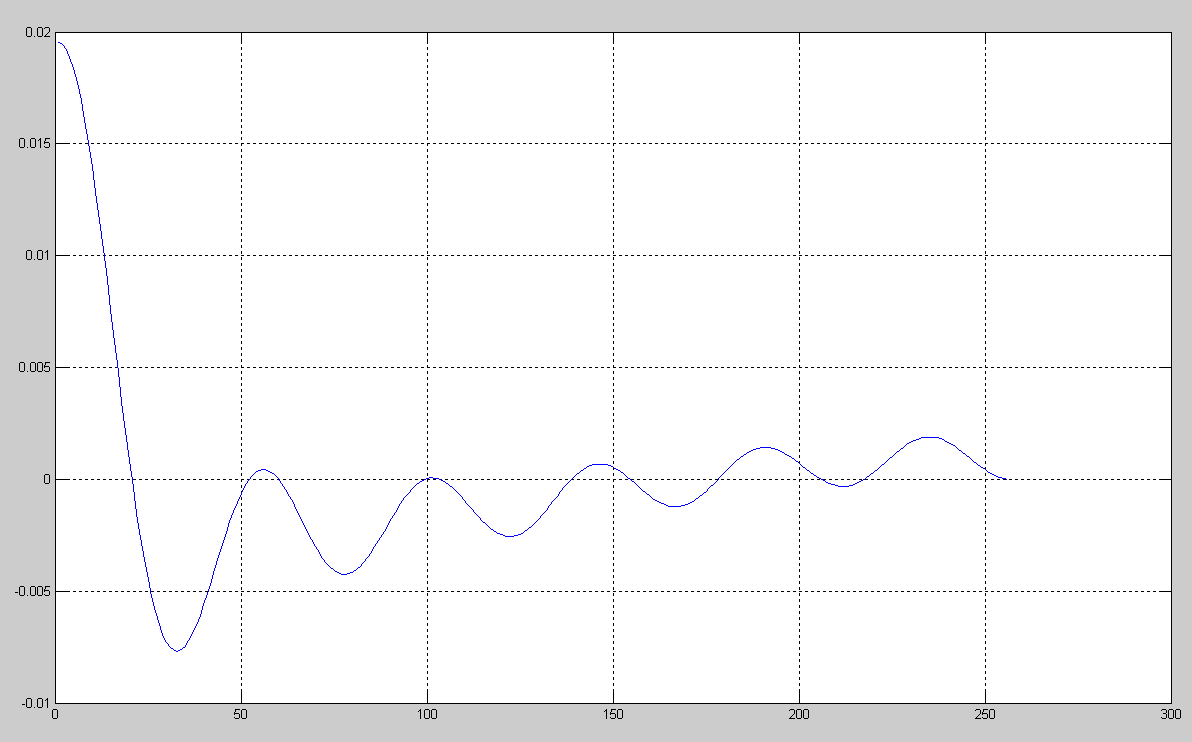
Рис. 10 ИПХ фильтра с прямоугольной частотной характеристикой
Как видим, ИПХ такого фильтра не является ограниченной по времени, так что даже далекие по времени отсчеты, часть из которых, как было показано ранее, является некорректной, оказывают влияние на результат фильтрации. При этом чем шире вырезаемая полоса, тем отклик будет уже, и, следовательно, меньше требуемая величина перекрытия; чем уже полоса, тем большее перекрытие входных выборок следует вводить.
Поэтому в тракте ШП необходимо предусмотреть фильтр с частотной характеристикой, отличной от прямоугольной. К импульсной переходной характеристике такого фильтра предъявляется следующее требование: ее уровень на далеких отчетах должен быть как можно меньше, чтобы уменьшить их влияние на восстановленный после вырезания полосы сигнал.
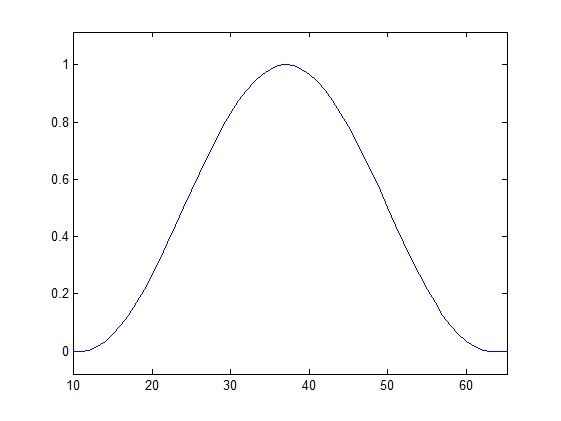
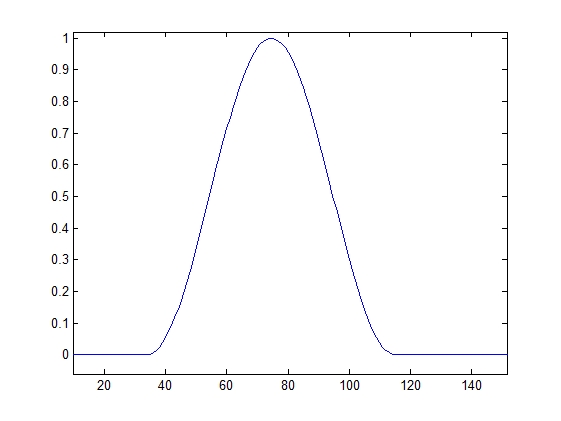
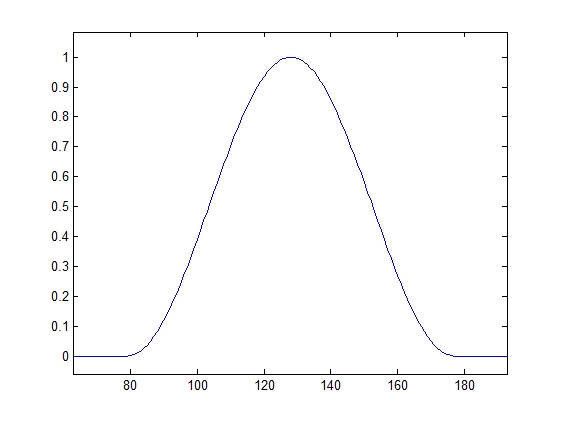
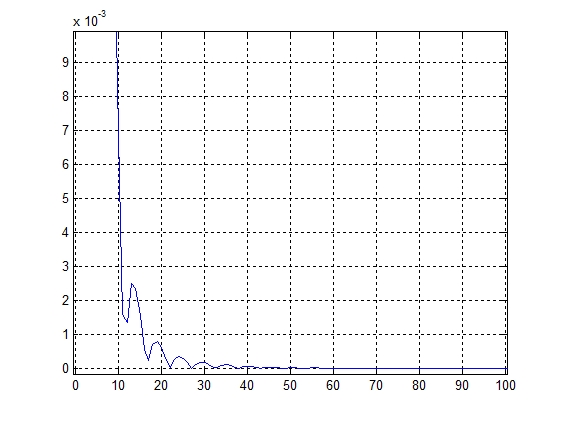
На следующем рисунке 11 приведены ИПХ некоторых фильтров (частотных окон): красная линия – окно Хана, черная – окно Хэмминга, зеленая – Кайзера.
На рисунке 12 представлены соответствующие амплитудно-частотные характеристики этих окон: красная линия – окно Хана, черная – окно Хэмминга, зеленая – Кайзера.
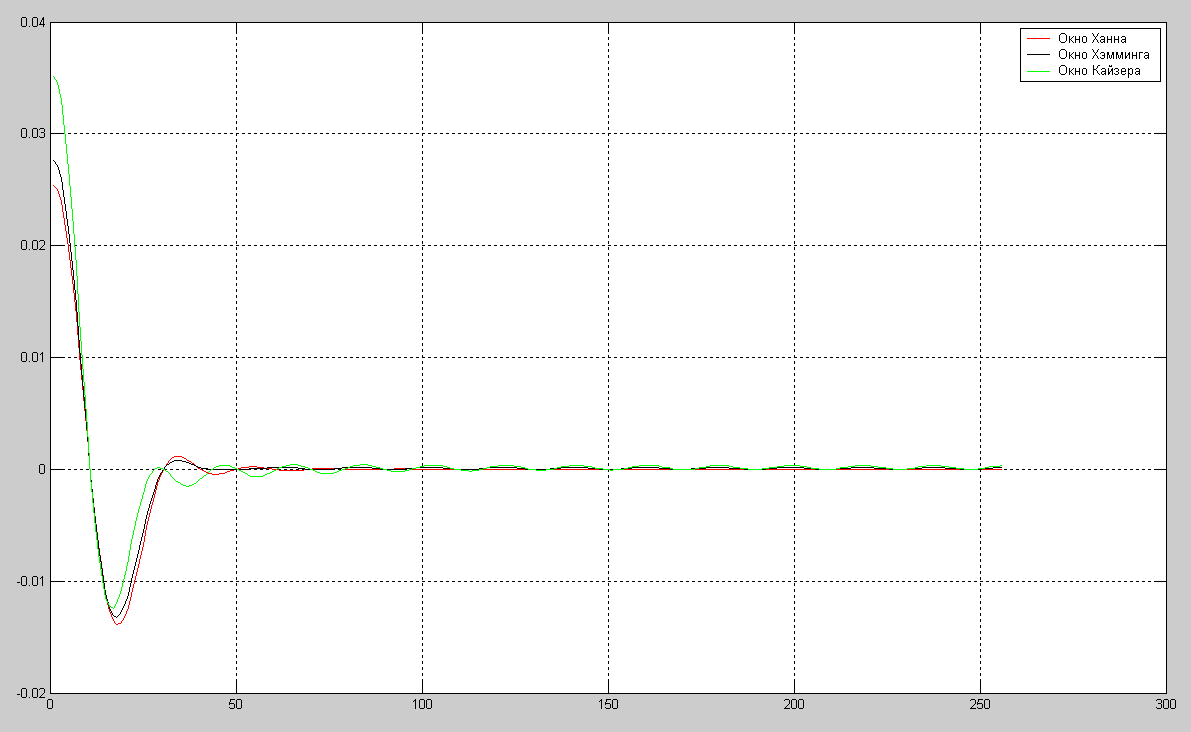
Рис. 11 ИПХ фильтров Ханна, Хэмминга, Кайзера
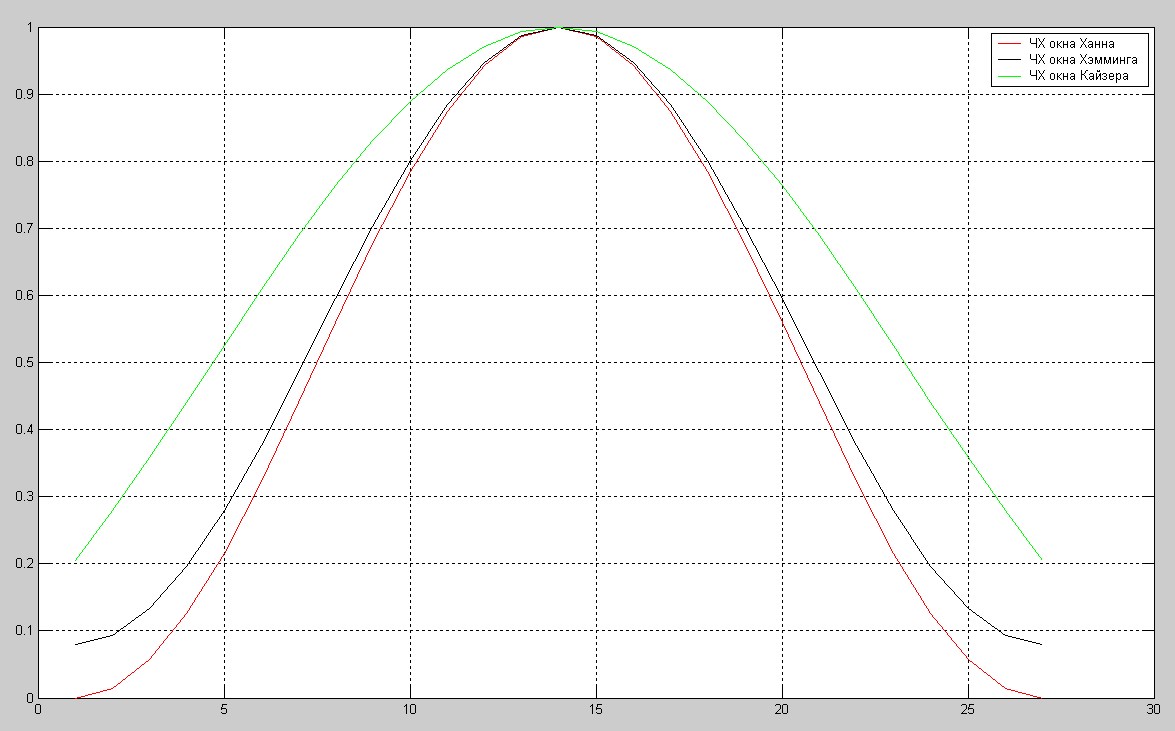
Рис. 12 Вид частотных окон Ханна, Хэмминга и Кайзера
Все представленные окна имеют общий параметр – размер окна L, который равен 27 частотным отсчетам, что составляет примерно 5 % от полосы принимаемого сигнала.
На рисунке 13 приведен результат восстановления сигнала при применении частотного окна Хэмминга:
Чем больше n, тем большая доля энергии, сосредоточенная в главном лепестке спектра (и тем шире этот главный лепесток), и тем меньше уровень боковых лепестков. Черная пунктирная линия – исходный сигнал, синяя – восстановленный сигнал при применении частотного окна Хэмминга.
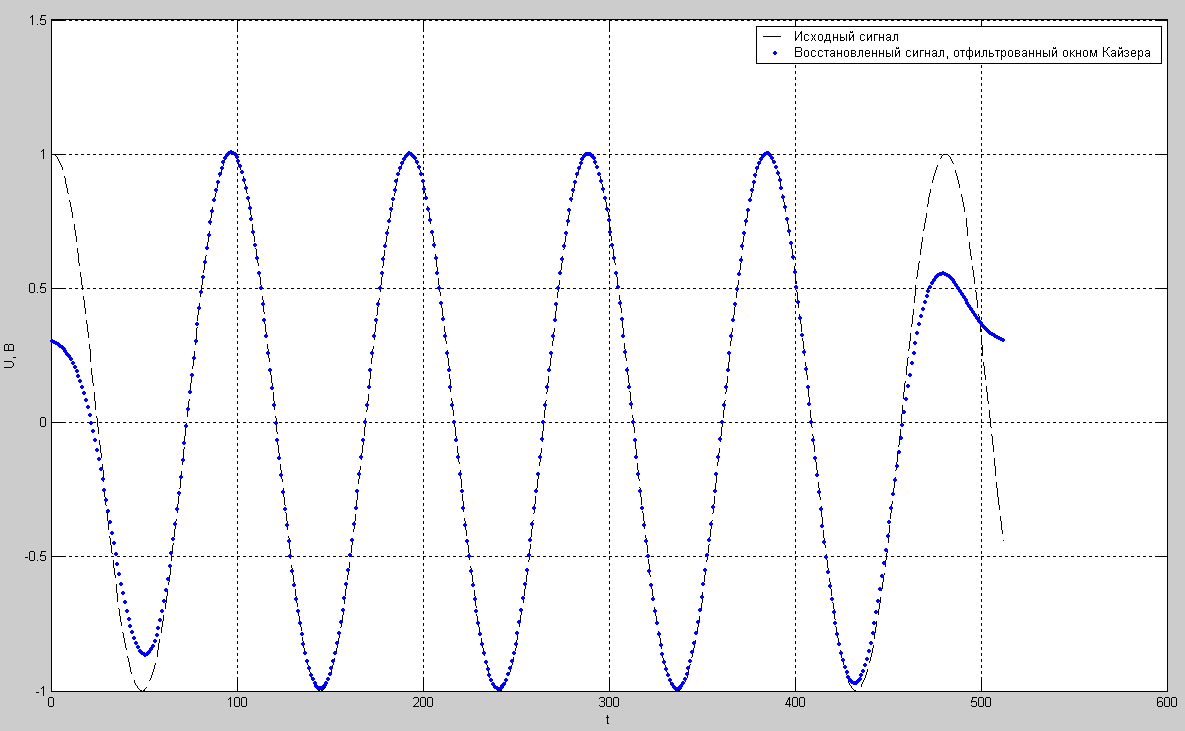
Рис. 13 Иллюстрация эффекта, возникающего при вырезании полосы фильтром Хэмминга
Как видим, при этом уменьшаются амплитудные искажения в средней части реализации.
Как видно из рисунка 13 частотные окна, форма которых отлична от прямоугольной, вносят амплитудные искажения на краях полосы обработки. Для минимизации влияния использования частотных окон на уровень сигнала, с частотой, близкой к краям полосы обработки (0.3ч4.5) кГц, необходимо несколько расширить полосу фильтрации.
3.3 Частотный сдвиг при понижении полосы частот прослушивания
Итогом работы тракта прослушивания является возможность дать оператору прослушать сигнал полученный в результате обработки. Поскольку человеческое ухо лучше воспринимает звук в диапазоне от 0,3 до 4 кГц то возникает необходимость переноса полученного сигнала в область более низких частот, что влечет за собой ряд дополнительных проблем.
В результате проведенного моделирования было установлено, что сдвигать можно не на произвольное количество спектральных отчетов и более того, не при произвольной величине перекрытия. Следующие рисунки 14-17 иллюстрируют этот эффект.
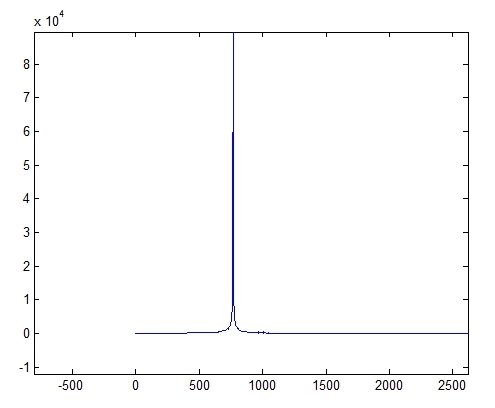
Рис.14а. Спектр восстановленного сигнала после сдвига его полосы в частотной области на 2Δf. Перекрытие входных выборок 50%
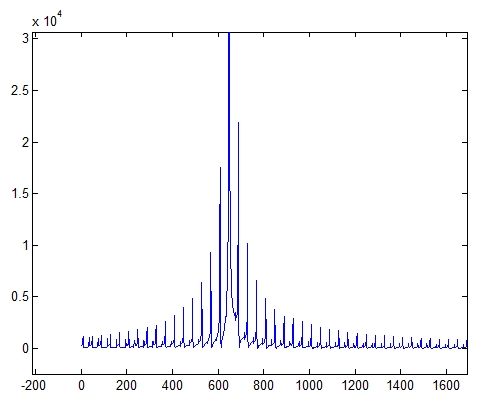
Рис. 14б. Спектр восстановленного сигнала после сдвига его полосы в частотной области на 3Δf. Перекрытие входных выборок 50%
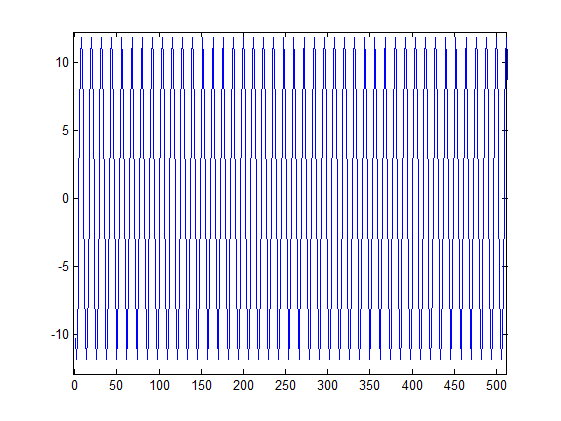
Рис 15а. Состыкованная реализация восстановленного сигнала после сдвига его полосы в частотной области на 4Δf. Перекрытие входных выборок 50%
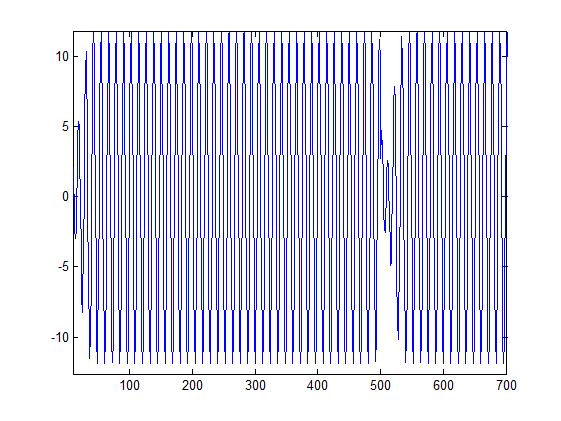
Рис 15б. Состыкованная реализация восстановленного сигнала после сдвига его полосы в частотной области на 3Δf. Перекрытие входных выборок 50%
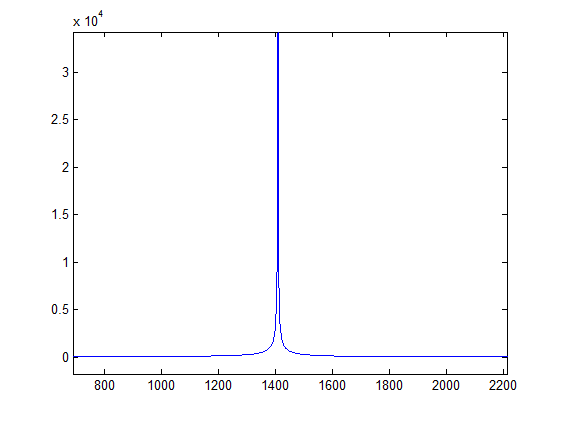
Рис. 16а Спектр восстановленного сигнала после сдвига его полосы в частотной области на 4Δf. Перекрытие входных выборок 25%
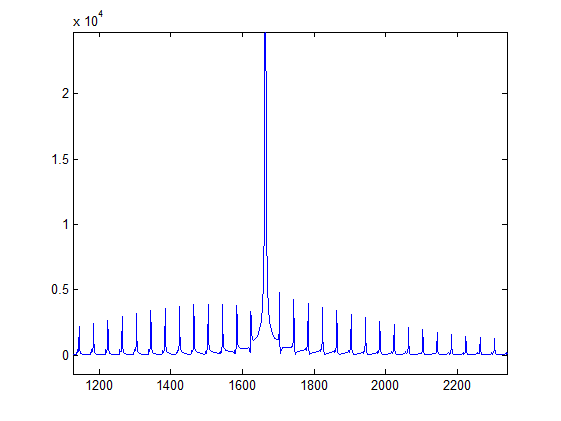
Рис. 16б Спектр восстановленного сигнала после сдвига его полосы в частотной области на 4Δf. Перекрытие входных выборок 17%
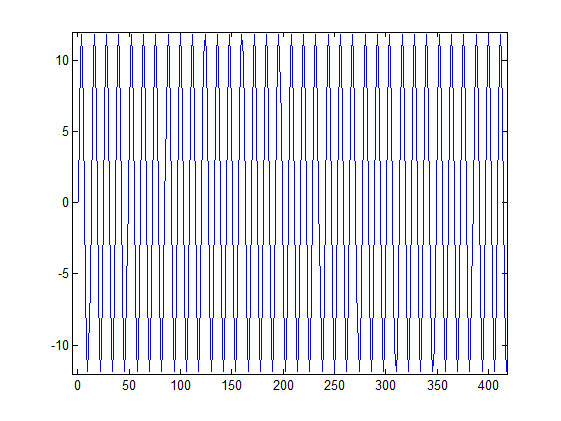
Рис 17а. Состыкованная реализация восстановленного сигнала после сдвига его полосы в частотной области на 4Δf. Перекрытие входных выборок 25%
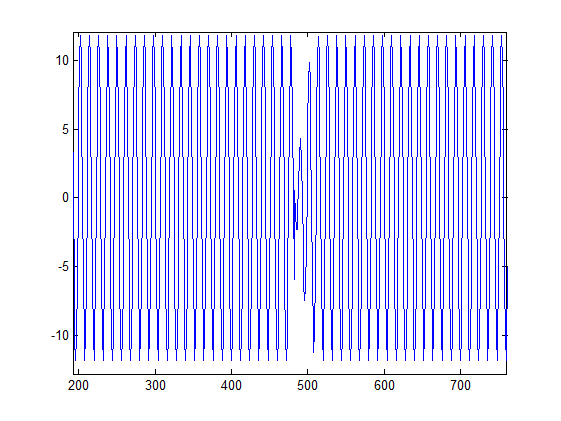
Рис 17б. Состыкованная реализация восстановленного сигнала после сдвига его полосы в частотной области на 5Δf. Перекрытие входных выборок 25%
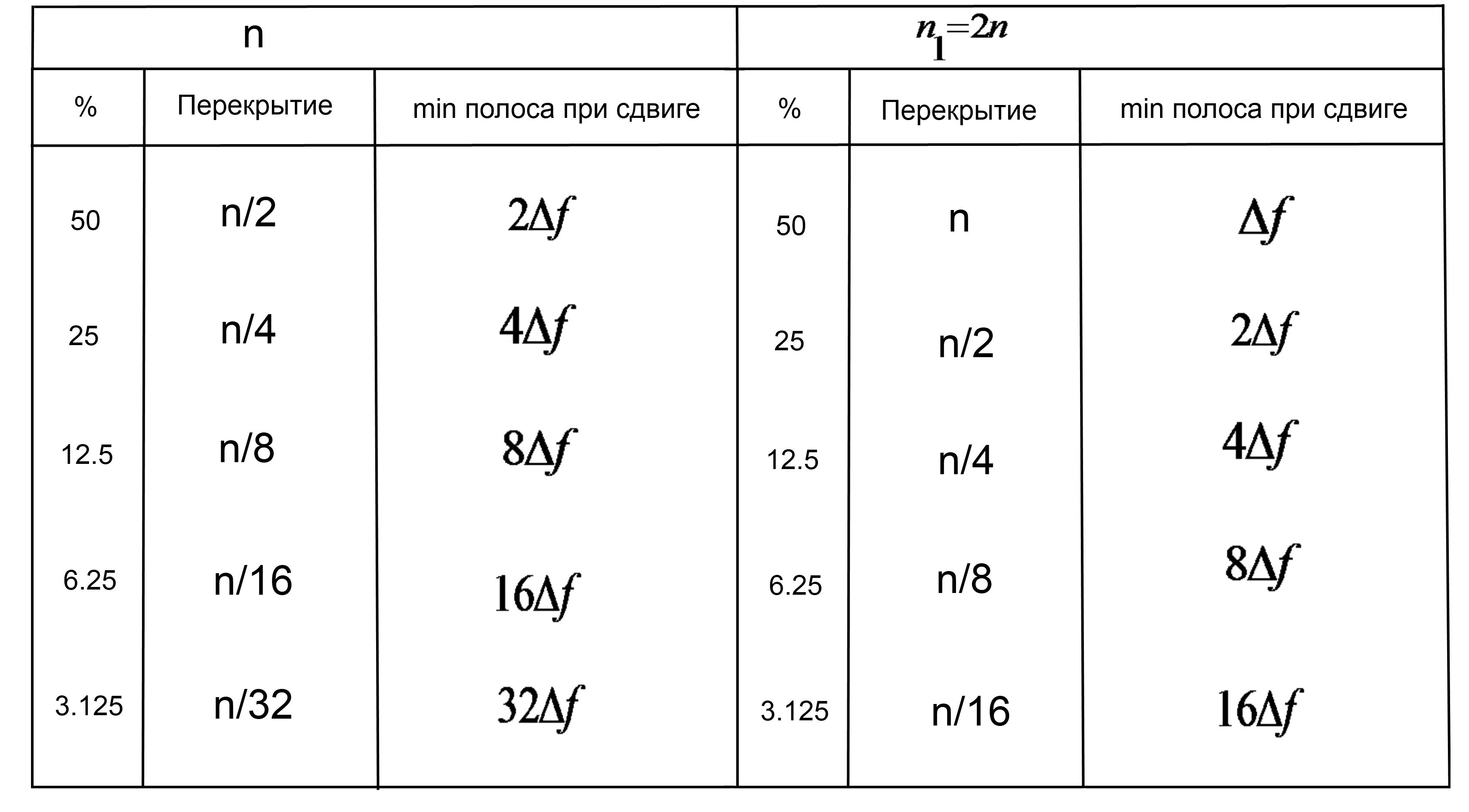
И также в результате проведенного моделирования установлено, что осуществить сдвиг частот без потери качества прослушивания можно только в случае, если величина перекрытия входных выборок является делителем числа n - базы БПФ. При этом сдвинуть на один спектральный отсчет или на нечетное число отсчетов нельзя ни при какой величине перекрытия, иначе происходят искажения и нестыковки последовательных фрагментов восстановленного сигнала.
В таблицу 1 сведены полученные в результате проведенного моделирования данные о соотношении величины перекрытия входных выборок и числа спектральных отсчетов, на которые можно сдвигать (понижать или повышать) полосу сигнала.
Таблица 1 . Взаимосвязь минимальной полосы частотного сдвига от величины перекрытия входных выборок
На основании вышеизложенного, можно сделать выводы о том, что для устранения эффектов, вызванных появлением некорректных отсчетов при формировании канала наблюдения в частотной области и не во всей полосе, а в ограниченной полосе, необходимо:
- обязательное исключение части отчетов в восстановленной реализации сигнала
из дальнейшей обработки;
- применение частотного фильтра с ЧХ, отличной от прямоугольной;
- расширение полосы обработки.
При этом величина перекрытия входных выборок должна быть больше суммы максимальной задержки сигнала на элементах АР и длительности ИПХ частотного фильтра. Других ограничений на величину перекрытия не накладывается.
Традиционно информация, используемая в тракте шумопеленгования, берется с перекрытием входных выборок на величину η. Это реализуется в интересах следующих задач и трактов гидроакустического комплекса:
тракты автоматического сопровождения цели (АСЦ) и выработки классификационной информации по ним;
тракт обнаружения дискретных составляющих сигнала во всем секторе обзора;
задача выделения огибающей сигналов во всем секторе обзора.
Однако для тракта прослушивания сигналов и помех, в котором для удобства оператора реализована (в цифровой области) возможность понизить частоту прослушивания, оказалось, что величина перекрытия входных выборок должна быть делителем числа n - количество точек БПФ.
Поскольку для процедуры БПФ обычно выбирают число n, являющееся степенью 2: n=2x ,
где x – целое положительное число, то и величина перекрытия должна быть тоже степенью 2, так как других простых делителей у n нет.
4 Программный макет тракта прослушивания
4.1 Структурная схема алгоритма обработки в тракте прослушивания
Структурная схема алгоритма обработки в тракте прослушивания цифровой ГАС с формированием каналов наблюдения в частотной области приведена на рисунке 18.
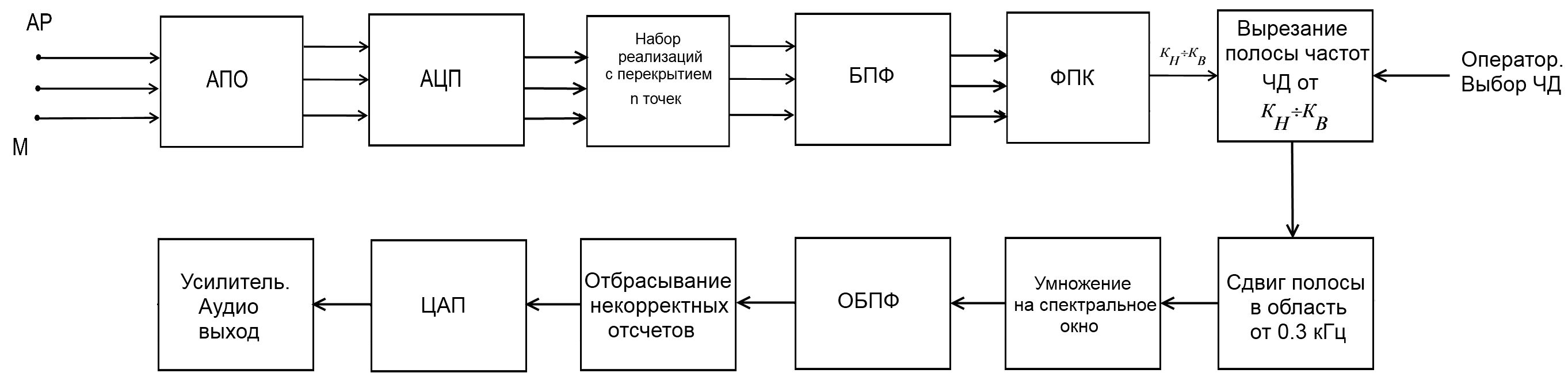
Рис. 18 Структурная схема алгоритма обработки в тракте прослушивания
1) АР – антенная решетка, M – количество ее приемных элементов;
2) АПО – фильтрация сигнала, предварительное усиление;
3) АЦП – аналого-цифровое преобразование с частотой дискретизации 24000Гц, процессов, принятых на М приемных элементах антенны; получаем дискретизированные по пространству и по времени выборки входного поля;
4) Набор реализаций с перекрытием 25 % точек;
5) БПФ – n-точечное быстрое преобразование Фурье по всем М каналам. Частотное разрешение системы df=fd/n;
6) ФПК – формирование пространственного канала: осуществляется в частотной области умножением на фазирующие коэффициенты и суммированием выходов задержанных реализаций. Получаем один выход в полосе от 1 до 8 кГц, границам полосы частот соответствуют номера частотных отсчетов Кн=[1000/df]=21 и Кв=[8000/df+0.5]=171.
7) Вырезание полосы частот, соответствующей заданному оператором номеру частотного диапазона Nd (от 1 до 3):
I чд - от Кн= 21 до Кв=53,
II чд - от Кн= 42 до Кв=106,
III чд - от Кн= 85 до Кв=171;
8) Сдвиг полосы в область от 0.3 кГц (для удобства оператора); сдвиг осуществляется на величину:
4Δf = 187 Гц - в I чд,
32Δf = 1497 Гц – во II чд,
76Δf = 3556 Гц – в III чд;
9) Умножение на спектральное окно, в нашем случае окно Ханна с числом точек, зависящим от ширины частотного диапазона:
K=53 – в I чд,
K=81 – во II чд,
K=99 – в III чд ;
10) Восстановление сигнала во временную область с использованием процедуры ОБПФ на те же самые n точек;
11) Отбрасывание некорректных отсчетов – по n/8 точек в начале и в конце реализации;
12) Стыковка реализаций;
13) Цифро-аналоговое преобразование (ЦАП) с частотой дискретизации 24000кГц;
14) Вывод результатов на динамик или выносные аудиосистемы.
4.2 Структурная схема программного макета тракта прослушивания
В соответствии с описанными в предыдущих разделах алгоритмами функционирования тракта прослушивания для выбора параметров и уточнения алгоритмов обработки в среде инженерных расчетов MatLab была написана моделирующая работу этого тракта программа. Язык программирования среды MatLab является наиболее удобным для работы с матричными структурами данных, а также содержит большое число вспомогательных функций и операций над матрицами и многомерными массивами данных. Кроме того, MatLab обладает широкими возможностями по графическому отображению результатов.
Структурная схема программного макета тракта прослушивания приведена на рисунках 19 и 20.
Программный макет тракта прослушивания включает в себя следующие функциональные блоки:
Блок задания параметров антенной решетки и параметров цифровой обработки в тракте ШП.
Задаются основные параметры системы, включая:
- Скорость звука,
- Частота дискретизации,
- Задание мнимой единицы,
- Количество элементов АР,
- Шаг между приемными элементами АР,
- длительность формируемого сигнала,
-Количество частотных диапазонов,
-Число точек БПФ,
- величина перекрытия входных выборок,
-Нижняя полоса и верхняя полоса всего тракта, и разбивка на 3 диапазона.
Блок задания параметров сигнала и параметров обработки в тракте прослушивания.
В этом блоке происходит выбор типа сигнала:
-тональный,
-амплитудно-модулированный тональный,
- амплитудно-модулированный шумовой;
Задаются:
- несущая частота сигнала,
-частота модуляции,
-глубина модуляции,
-число тактов обработки,
-частотный диапазон прослушивания,
-угол падения фронта волны на элементы АР,
- частотный сдвиг для выбранного ЧД,
- степень расширения полосы частот (количество отсчетов),
- спектральное окно.
Формирование процессов на выходе приемных элементов АР. Имитационное моделирование входного процесса включает в себя задание моделей полей сигнала, формирование временной реализации сигнала, фильтрацию ее в заданном диапазоне частот, формирование плоского фронта сигнала на элементах АР.
Перечень процедур, проводимых в этом функциональном блоке:
расчет координат приемных элементов в АР,
формирование сигнала заданной частоты в поле,
расчет временных задержек фронта волны сигнала исходя из направления его прихода,
формирование дискретизированных с частотой fd=24000Гц сигналов на приемных элементах АР.
Функциональные программы расчета выходного эффекта тракта прослушивания:
Последовательный набор по n временных отсчетов сигналов на элементах АР с перекрытием 25% - так называемый такт обработки;
Дальнейшие процедуры выполняются на каждом такте обработки:
Переход в частотную область с использованием процедуры БПФ;
Формирование ПК на частотах рабочей полосы;
Вырезание полосы частот выбранного частотного диапазона (ЧД);
Сдвиг полосы частот на заранее рассчитанное для каждого ЧД число спектральных отсчетов;
Умножение отсчетов спектра сформированного канала на спектральное окно;
Восстановление сигнала во временной области (процедура обратного ПФ);
Отбрасывание некорректных отчетов из реализации – по n/8 отсчетов в начале и в конце реализации;
набор реализации большой длительности.
6. Выдача сигнала на ЦАП, вычисление спектра сигнала с высоким разрешением по частоте, графическое представление результатов обработки.
4.3 Расчет выходных эффектов тракта
Сформированный указанным выше способом сигнал на элементах антенны «нарезается» на временные фрагменты длиной n=512 точек с учетом перекрытия, которое вводится в модель тракта как параметр. Каждый фрагмент подвергается процедуре БПФ, в результате чего получаются спектры процессов на выходе приемных элементов. Из получившегося набора частот в дальнейшую обработку берутся только номера частот fk, соответствующие заданной полосе обработки (fнчfв).
Как было показано выше, вырезание полосы фильтром с прямоугольной частотной характеристикой вносит дополнительные искажения в восстановленный сигнал. Поэтому в модели предусмотрено расширение полосы обработки от значения (0,3-4,5) кГц до (0,05-5) кГц.
На следующем этапе происходит формирование канала наблюдения в частотной области путем сложения спектров реализаций с приемных элементов АР, умноженных на заранее рассчитанные фазирующие коэффициенты на это направление.
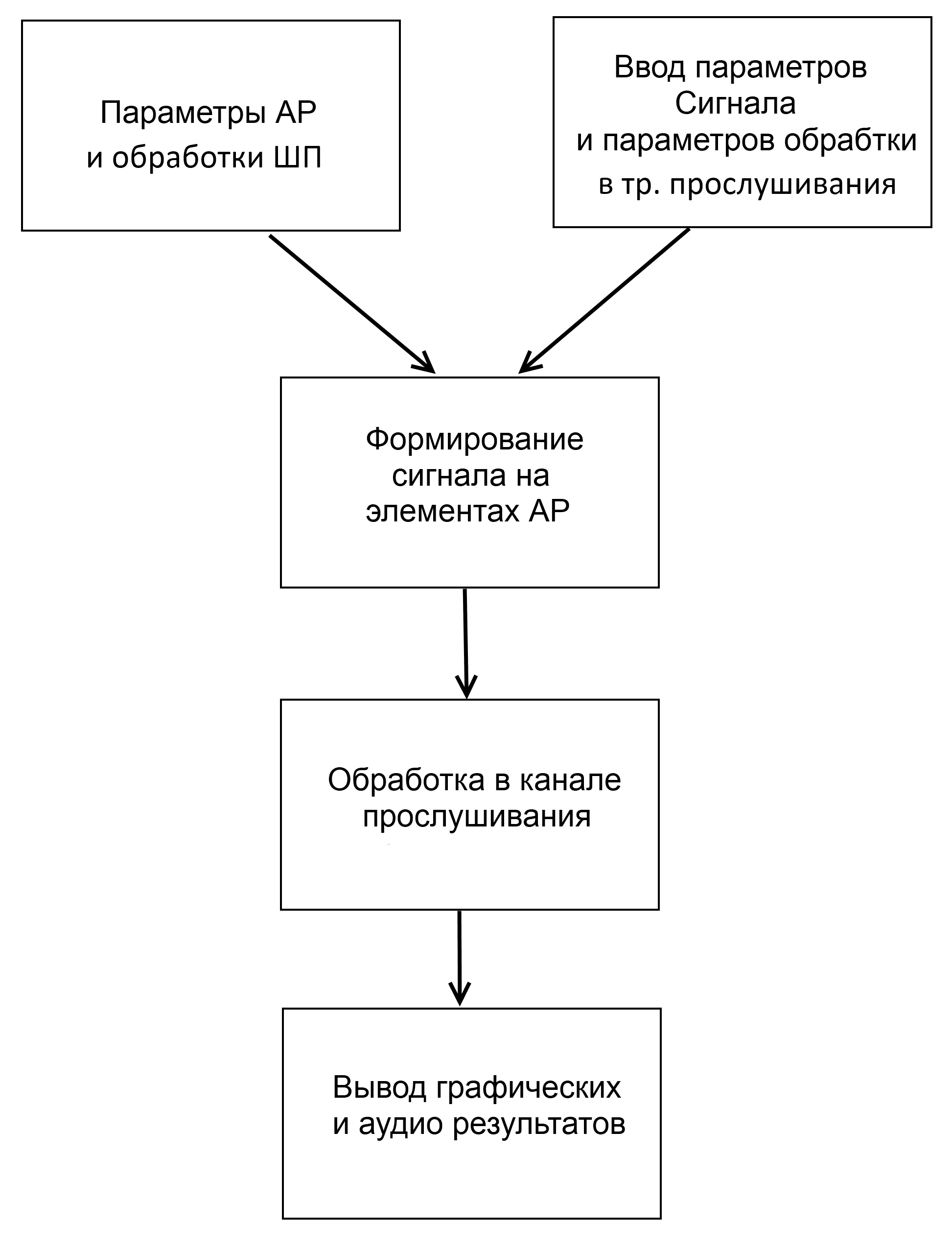
Рис. 19 Структурная схема программного макета тракта прослушивания
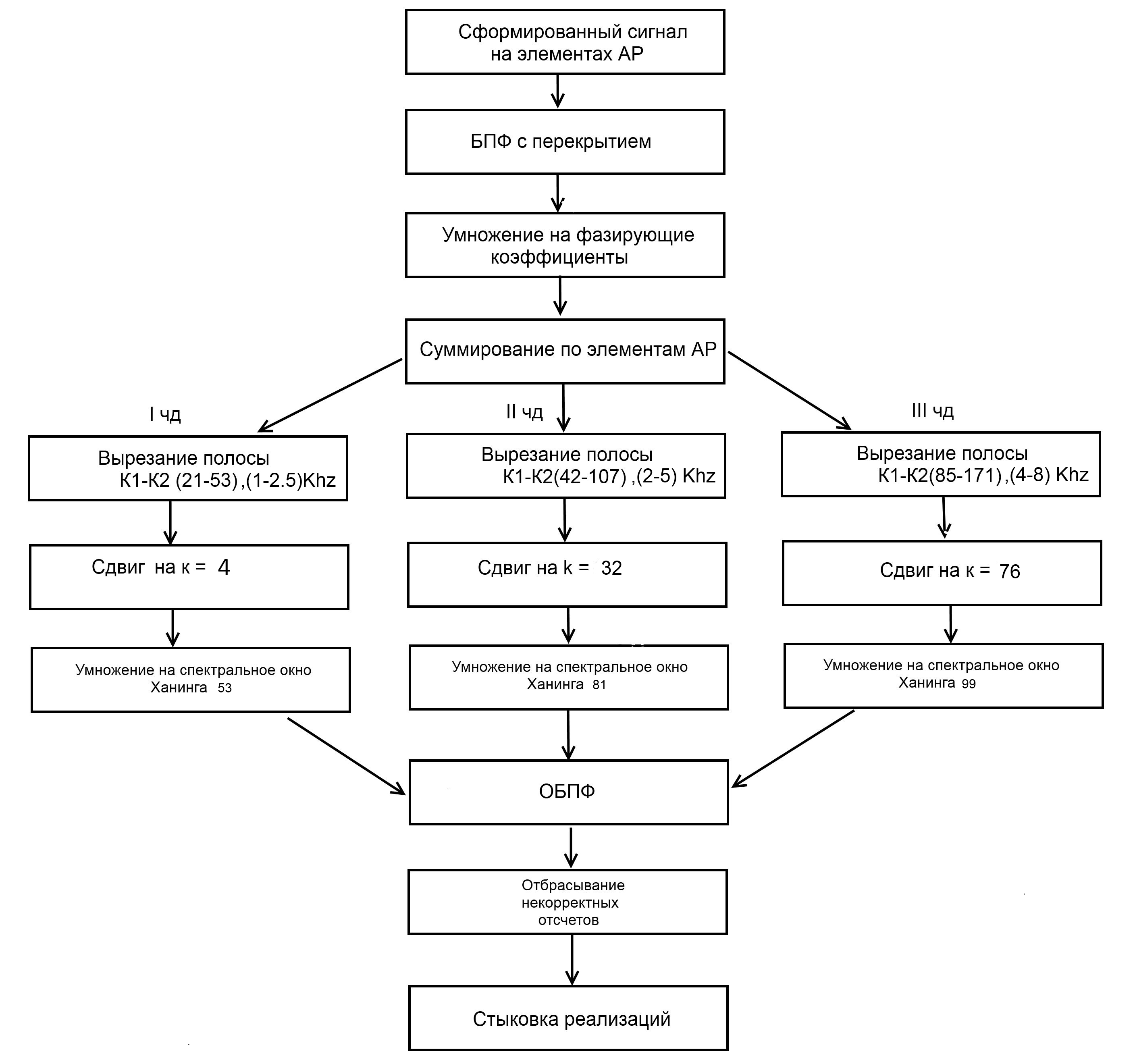
Рис.20 Обработка в канале прослушивания
После ФХН выполняется вырезание полосы частот выбранного частотного диапазона и сдвиг ее на заранее рассчитанное для каждого ЧД число спектральных отсчетов. Затем проводится процедура ОБПФ, на выходе которой получаем временную реализацию. Как было показано ранее, для устранения эффектов, вызванных вырезанием полосы частот, необходимо перед восстановлением сигнала во временную область ввести частотное окно, вид которого в модели можно выбирать из заранее созданных файлов либо из имеющегося в системе MatLab банка частотных фильтров, а также задавать их параметры. В модели тракта прослушивания параллельно формируются и обрабатываются сигналы, восстановленные с применением частотного окна и без него.
Восстановленный сигнал содержит в себе некорректные отсчеты. Фазирующие коэффициенты, используемые при формировании веера пространственных каналов, таковы, что длительность “испорченных” фрагментов реализации в начале и в конце ее приблизительно одинакова. Поэтому из реализации исключаются некорректные отсчеты в начале и в конце кусочка реализации длиной n отсчетов.
Для сокращения времени моделирования, а также экономии внутренней памяти MatLab сигнал на приемных элементах АР моделируется на ограниченном временном интервале, причем длина этого интервала должна быть достаточной для формирования оценки спектральной плотности мощности процесса с требуемым частотным разрешением. Длина такой реализации в программе определяется автоматически с учетом необходимого количества точек перекрытия и количества точек.
5 Результаты расчетов
Чтобы сформировать сигнал на элементах АР нужно рассчитать задержки на каждом элементе и сымитировать их.
Исходя из заданных нами параметров, система формирует приходящий на АР сигнал под определенным углом.
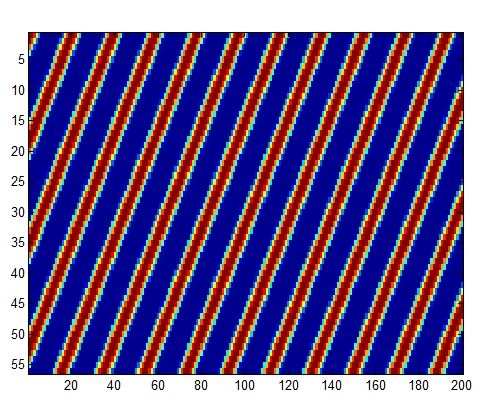
Рис.22 Приход сигнала под углом на элементы АР
Обработка в канале прослушивания
Блок основных вычислительных операций подробно будет рассмотрен далее.
Вывод графических и аудио результатов
После обработки мы можем прослушать и наглядно увидеть графики сигналов, изначально пришедших на элементы АР, и вычисляем спектры восстановленных сигналов с высоким частотным разрешением, частное разрешение системы определяется длительностью реализации взятой в обработку.
По сформированным входным воздействиям реализуется обработка в канале прослушивания .
Сформированный сигнал на элементах АР
Исходя из заданных нами параметров, система формирует приходящий на АР сигнал под определенным углом.
БПФ с перекрытием
Выполняется БПФ с перекрытием, перекрытие задается произвольным, либо кратно числу точек БПФ (как и выяснилось в результате моделирования), но задать перекрытие мы можем произвольно. Выполняется перекрытие на каждом приемном элементе АР.
Умножение на фазирующие коэффициенты
Этап процедуры формирования. внесение задержек в частотной области
Суммирование по элементам АР
Вырезание полосы
Поскольку у нас частотное окно имеет спады на краях диапазона, мы расширяем полосу сигнала, чтобы не сильно зарезать энергетику сигнала.
Сдвиг
В первом частотном диапазоне полоса частот 1-2,5 кГц это соответствует спектральным отсчетам: К нижнее =21, К верхнее =53. В соответствии с такой закономерностью сдвигать при выбранной величине перекрытия мы можем только порциями по 4Δf значит первый спектральный отсчет ,для того чтобы попасть в полосу 3-3.5 кГц должен быть сдвинут на 4 отсчетов . Соответственно для второго диапазона 2-5 кГц : К нижнее =42, К верхнее =107 , 32 отсчетов. Для третьего 4-8 Кгц: К нижнее =85, К верхнее =171, 76 отсчетов.
Рассчитывать коэффициент сдвига будем проводить по формуле
![]()
Где
![]() нижнее
значение частотного
диапазона,
нижнее
значение частотного
диапазона,
![]() =
коэффициент
фильтра,
=
коэффициент
фильтра,![]() -
число сдвига
спектральных
отсчетов.
-
число сдвига
спектральных
отсчетов.
7 – коэффициент минимальной частоты переноса спектра = 300 ГЦ
![]()
Умножение на спектральное окно
Для каждого из трех диапазонов мы выбираем свои параметры фильтра . В данной случае будем менять лишь параметры фильтра Ханна (53 81 99). Полученные по формуле:
K=kB-kH+2*kl+1
ОБПФ
Обратное преобразование Фурье с количеством точек равным в БПФ
Отбрасывание некорректных отсчетов
Формирование делалось таким образом, чтобы некорректные отчеты равномерно распределялись вначале и в конце реализации поэтому половину отчетов мы убираем из начала реализации и из конца.
Стыковка реализаций
В результате получаем реализацию большой длительности, которая подвергается преобразованию Фурье.
MATLAB - это интерактивная система, в которой основным элементом данных является массив. Это позволяет решать различные задачи, связанные с техническими вычислениями, особенно в которых используются матрицы и вектора, в несколько раз быстрее, чем при написании программ с использованием "скалярных" языков программирования, таких как Си или Фортран.
В результате работы программы мы получаем следующие результаты :
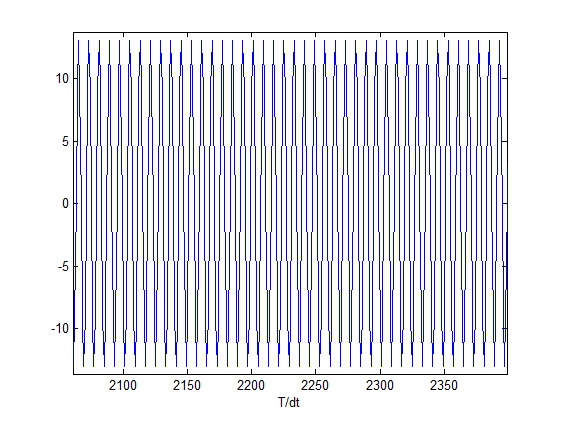
Для первого частотного диапазона (1-2.5) Khz
Каждый частотный диапазон соответствует спектральным отсчетам k1=[21] k2=[53]
Угол прихода сигнала берем равный Pi/4
Сдвиг полосы в область от 0.3 , 4Δf = 187 Гц
Умножение на спектральное окно K=53
Частота сигнала 2000 Гц
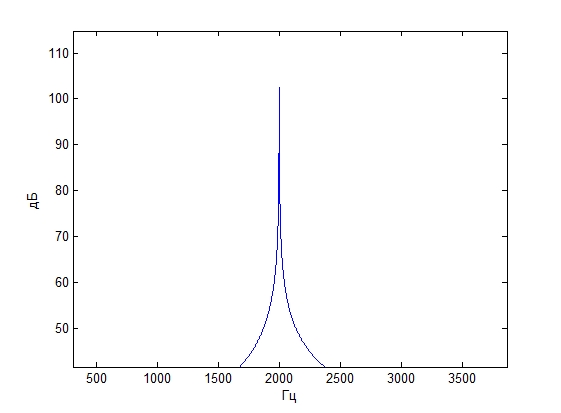
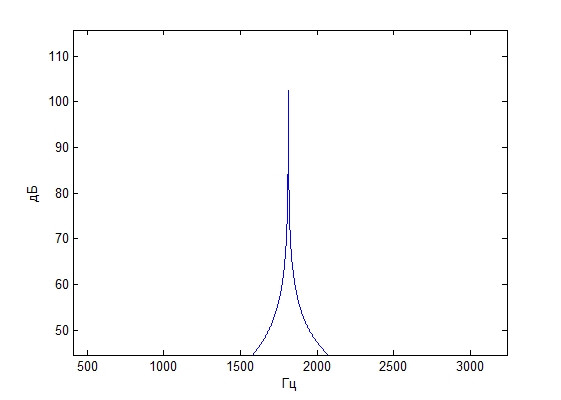
Спектр исходного сигнала Спектр восстановленного сигнала
со сдвигом
Исходный сигнал во временной области Восстановленный сигнал во
временной области
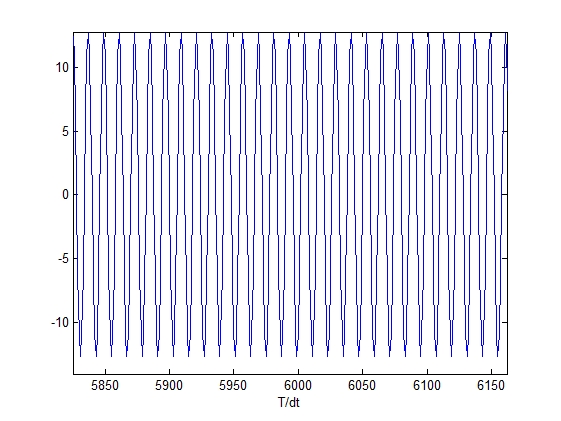
Для второго частотного диапазона (2-5) Khz
Каждый частотный диапазон соответствует спектральным отсчетам k2=[42] k2=[107]
Угол прихода сигнала берем равный Pi/4
Сдвиг полосы в область от 0.3 , 32Δf = 1500 Гц
Умножение на спектральное окно K=81
Частота сигнала 3500 Гц
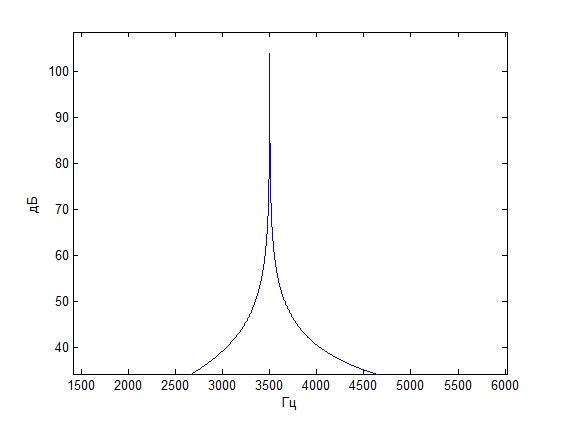

Спектр исходного сигнала Спектр восстановленного
сигнала со сдвигом
Исходный сигнал во Восстановленный сигнал
временной области во временной области
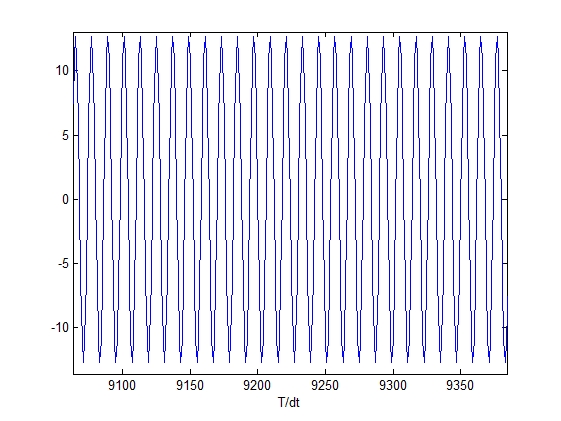
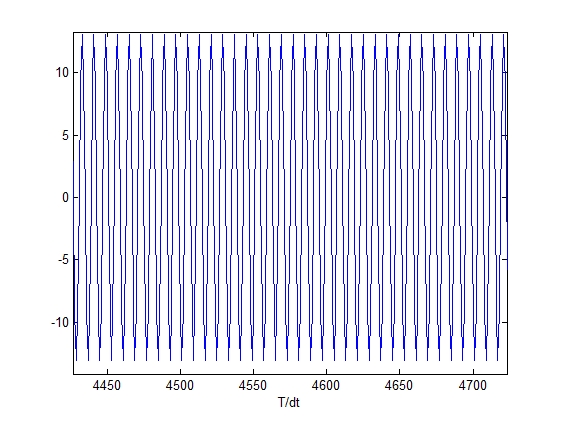
Для третьего частотного диапазона (4-8) Khz
Каждый частотный диапазон соответствует спектральным отсчетам k2=[85] k2=[171]
Угол прихода сигнала берем равный Pi/4
Сдвиг полосы в область от 0.3 , 76Δf = 3570 Гц
Умножение на спектральное окно K=99
Частота сигнала 5000 Гц
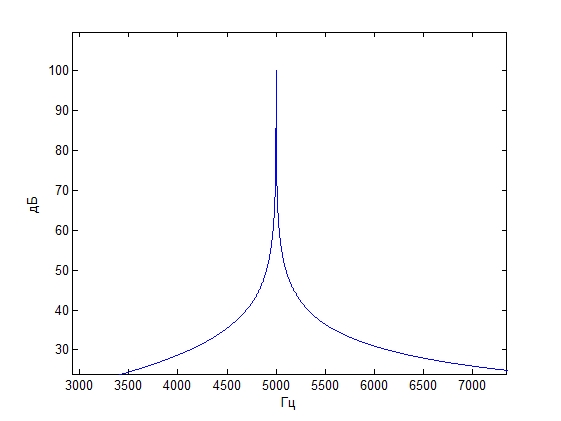
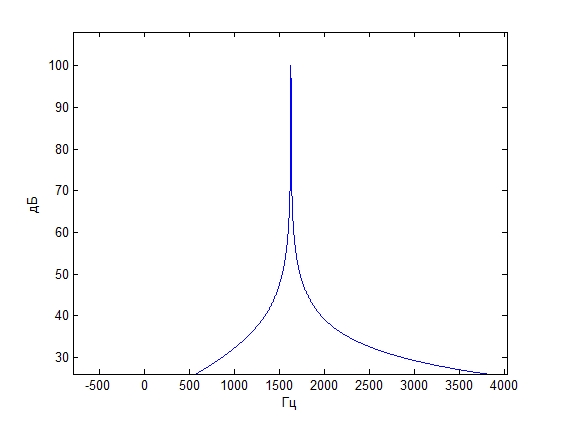
Спектр исходного сигнала Спектр восстановленного
сигнала со сдвигом
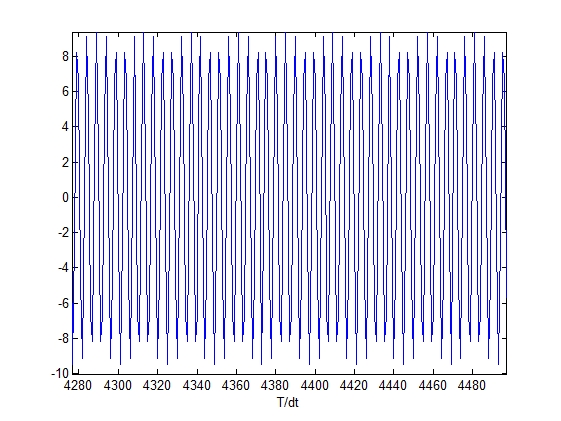
Исходный сигнал во временной Восстановленный сигнал
области во временной области
Виды частотных окон Ханна ИПХ фильтров Ханна
для трех диапазонов для трех диапазонов
Для первого диапазона (1-2.5) кГц
Для второго диапазона (2-5) кГц
Для третьего диапазона (4-8) кГц.
Заключение
В данной работе была разработана структура тракта прослушивания гидроакустических сигналов на выходе сформированного пространственного канала (канала наблюдения) в тракте шумопеленгования с использованием многоэлементной антенной решетки для трех частотных диапазонов.
Разработан программный макет тракта прослушивания, удовлетворяющий всем требования для моделирования сигналов и процессов их обработки в тракте ШП.
Установлена взаимосвязь основных параметров тракта прослушивания с базовыми параметрами тракта ШП.
Требования задания полностью выполнены и подтверждены графиками, полученными в результате моделирования.
Список литературы
Липатов В.В. Электромагнитные поля в морской воде [Книга]. - Ленинград : ГМТУ, 1990.
Рогожников К. И. Морские информационные системы [Книга]. - Санкт-Петербург : АМУР-ПРЕСС, 2002. - стр. 106.
Лоскутова Г.В., Полканов К.И. Пространственно-частотные и частотно – волновые методы описания и обработки гидроакустических полей. [Книга]. - Санкт-Петербург .: Наука, 2007.-239с.
Ю.А.Корякин, С.А. Смирнов, Г.В.Яковлев. Корабельная гидроакустическая техника: состояние и актуальные проблемы.- СПб.:Наука.-410с.
Марпл-мл.С.Л. Цифровой спектральный анализ и его приложения. М.: Мир, 1990.
Смарышев М.Д. Направленность гидроакустических антенн. Л. Судостроение, 1973.
Гусев В.Г. Системы пространственно-временной обработки гидроакустической информации. Л.: Судостроение, 1988 г.
Дьяконов В.П., MATLAB 6 универсальная интегрированная система компьютерной математики. С-Пб: Питер, 2001 г.
Лазарев Ю.А. Моделирование процессов и систем в MATLAB. СПб.: Питер, 2005 г
Поршнев С.В. MATLAB 7. Основы работы и программирования. М.: Бином-Пресс, 2006 г.
Сергиенко А.Б. Цифровая обработка сигналов. СПб.: Питер, 2003 г.
Приложение 1. Текст программы в Matlab
fd=24000;
dt=1/fd;
t=(0:dt:2);
d=0.1;
c=1500;
n=512;
M=30;
jk=sqrt(-1);
df=fd/n;
fk=df*(0:n-1);
f=input ('введите частоту сигнала (1-2.5)kHz-I чд,(2-5)kHz-II чд,(4-8)kHz-III чд =');
fk0=floor(f/df+0.5);
nd=input('Введите номер диапазона=');
k1=[21 42 85];
k2=[53 107 171];
k0_=[7 10 7];
kl_=[10 8 6];
kH=k1(nd);
kB=k2(nd);
kl=kl_(nd);
k0=k0_(nd);
fm=5;
am=0.0;
al=-pi/4;
s=cos(2*pi*f*t);
s=cos(2*pi*f*t).*(1+am*cos(2*pi*fm*t));
tau0=d/c*sin(al);
tau=(0:M-1)'*tau0;
Ttau=repmat(tau,1,size(t,2));
%sound (s,fd)
T=repmat(t,M,1);
x=cos(2*pi*f*(T-Ttau)).*(1+am*cos(2*pi*fm*(T-Ttau)));
fk1=[fk(1:n/2+1) fk(n/2+2:n)-fd];
kolf=exp(jk*2*pi*tau*fk1);
fo=zeros(1,n);
fo(kH-kl:kB+kl)= hann (kB-kH+2*kl+1);
Ro=repmat(fo,M,1);
Per=1*n/2;
n_per=n-Per;
K=Per/2+1;
for i=1:100;
In=(i-1)*n_per+1;
Ik=In+n-1;
Y0=fft(x(:,In:Ik),n,2);
Y=Y0.*Ro;
z=sum(Y.*kolf,1);
V=zeros(1,n);
V(k0:k0+kB-kH+2*kl)=z(kH-kl:kB+kl);
U=ifft(z,n);
Ik1=i*n_per; In1=(i-1)*n_per+1;
w(In1:Ik1)=real(U(K:K+n_per-1));
U=ifft(V,n);
w1(In1:Ik1)=real(U(K:K+n_per-1));
end
nBCE=size(w,2);
figure,plot(fd/nBCE*(0:nBCE-1),20*log10(abs(fft(w))));
xlabel('Гц')
ylabel('дБ')
figure, plot (w)
xlabel('T/dt')
sound (w,fd);
figure,plot(fd/nBCE*(0:nBCE-1),20*log10(abs(fft(w1))));
xlabel('Гц')
ylabel('дБ')
figure, plot (w1)
xlabel('T/dt')
sound (w1,fd);
figure,plot(abs(ifft(fo,512))),grid on;
figure,plot (fo);
fd=24000;
dt=1/fd;
t=(0:dt:2); %массив времен
d=0.1;% шаг между приемниками АР
c=1500;
n=512; % число точек БПФ
M=30; %кол во элементов АР (линейная)
jk=sqrt(-1); %мнимая еденица
df=fd/n; %частотное разрешение системы
fk=df*(0:n-1); %массив частот после преобр фурье
f=input ('введите частоту сигнала (1-2.5)kHz-I чд,(2-5)kHz-II чд,(4-8)kHz-III чд =');
fk0=floor(f/df+0.5);
nd=input('Введите номер диапазона=');
k1=[21 42 85];%Начальные номера диапазонов
k2=[53 107 171];%Конечные номера длиапазона
k0_=[7 10 7];
kl_=[10 8 6];
kH=k1(nd);
kB=k2(nd);
kl=kl_(nd);
k0=k0_(nd);
fm=5;
am=0.0;
al=-pi/4; % угол прихода сигнала
s=cos(2*pi*f*t); % сигнал в поле в точке значения
s=cos(2*pi*f*t).*(1+am*cos(2*pi*fm*t));
tau0=d/c*sin(al); %Задержка сигнала между соседними приемными элементами
tau=(0:M-1)'*tau0;% массив задержек
Ttau=repmat(tau,1,size(t,2)); %формируем массив задержек размножаем на все моменты времени на 1 сек
%sound (s,fd)
T=repmat(t,M,1);% размножили время на M приемных элементов
x=cos(2*pi*f*(T-Ttau)).*(1+am*cos(2*pi*fm*(T-Ttau))); %сигнал на элементах АР приходящий с направления альфа
%figure,image(x(:,1:200)*70), shading interp;
fk1=[fk(1:n/2+1) fk(n/2+2:n)-fd];
kolf=exp(jk*2*pi*tau*fk1);
fo=zeros(1,n);
fo(kH-kl:kB+kl)= hann (kB-kH+2*kl+1); % вырезание полосы
Ro=repmat(fo,M,1); %Размножение матрицы
Per=1*n/2;%144%перекрытие
n_per=n-Per;
K=Per/2+1;
for i=1:100;
In=(i-1)*n_per+1;
Ik=In+n-1;
Y0=fft(x(:,In:Ik),n,2);
Y=Y0.*Ro;%вырезание полосы частот
z=sum(Y.*kolf,1); %Процедура формирования канала наблюдения
% сдвиг полосы частот
V=zeros(1,n);
V(k0:k0+kB-kH+2*kl)=z(kH-kl:kB+kl);
%Восстановление сигнала
U=ifft(z,n);
Ik1=i*n_per; In1=(i-1)*n_per+1; % изменить
w(In1:Ik1)=real(U(K:K+n_per-1));
U=ifft(V,n);
w1(In1:Ik1)=real(U(K:K+n_per-1));
end
nBCE=size(w,2); % число отсчетов в реализации
figure,plot(fd/nBCE*(0:nBCE-1),20*log10(abs(fft(w))));
xlabel('Гц')
ylabel('дБ')
figure, plot (w)
xlabel('T/dt')
sound (w,fd);
figure,plot(fd/nBCE*(0:nBCE-1),20*log10(abs(fft(w1))));
xlabel('Гц')
ylabel('дБ')
figure, plot (w1)
xlabel('T/dt')
sound (w1,fd);
figure,plot(abs(ifft(fo,512))),grid on;
figure,plot (fo);
Похожие рефераты:
Шпаргалки к экзамену по ОБЖ (Брянск)
Методы позиционирования и сжатия звука
Машины, которые говорят и слушают
Приемник цифровой системы передачи информации ВЧ-каналом связи по ВЛ
Расчет линии связи для системы телевидения
Оборудование летательных аппаратов
Линейное оборудование синхронной цифровой иерархии SL16
Техническая диагностика средств вычислительной техники
Беспроводные телекоммуникационные системы