| Похожие рефераты | Скачать .docx |
Курсовая работа: Программно управляемый частотомер
Введение
В современном обществе по мере познания им природы все более возрастает роль измерений. Соответственно непрерывно увеличивается объем измерительной информации – информации о значениях измеряемых физических величин, повышаются требования к качеству и способам ее обработки и использования.
Наибольшее распространение в современной науке и технике получают цифровые измерительные приборы и преобразователи, используемые для измерений, дистанционной передачи измерительной информации, в качестве промежуточных преобразователей для ввода информации в цифровые вычислительные машины и др.
Основные требования, предъявляемые к средствам измерений - это высокая точность; быстродействие; возможность автоматизации процесса измерений; представление результатов измерений в форме, удобной для обработки, в том числе с помощью ЭВМ; малые габариты и вес; высокая надежность.
Разрешить проблему сочетания точности и быстродействия позволили цифровые приборы. Цифровыми измерительными приборами называются приборы, осуществляющие автоматически в процессе измерения операции квантования измеряемой величины, ее цифровое кодирование и представление результатов измерения в цифровой форме непосредственно в виде числа или кода.
Отсутствие подвижных частей в приборах позволило резко увеличить их надежность и долговечность. Представление измерительной информации в цифровой форме дает возможность обработки ее в ЭВМ. Сравнительно легко осуществляется автоматизация процесса измерений.
Несмотря на схемные и конструктивные особенности, принцип построения цифровых приборов одинаков (рис.1).
|
|
|
Измеряемая величина поступает на входное устройство прибора ВУ, где происходит масштабное преобразование. С входного устройства сигнал поступает на аналого-цифровой преобразователь АЦП, где аналоговый сигнал преобразуется в соответствующий код, который отображается в виде числового значения на цифровом отсчётном устройстве ЦОУ. Для получения всех управляющих сигналов в цифровом приборе предусмотрено устройство управления (УУ) (на рис. 1 не показано).
Входное устройство цифрового прибора устроено аналогично электронному прибору, а в некоторых конструкциях на его входе используется фильтр для исключения помех.
В зависимости от принципа аналого-цифрового преобразования (АЦП) цифровые измерительные приборы разделяют на устройства прямого преобразования и компенсационные (с уравновешивающим преобразованием).
Современный инженер, работающий в любой отрасли промышленности, должен уметь выбрать и назначить соответствующие устройства измерений для управления технологическим процессом, контроля качества продукции, должен знать об основных метрологических характеристиках средств измерения.
1.Назначение прибора
Цифровой частотомер с программным управлением применяется на промышленных предприятиях и электротехнических лабораториях и предназначен для измерения частот в широком диапазоне.
Данный прибор может использоваться для настройки, испытаний и калибровки различного рода приемо-передающих трактов, фильтров для настройки систем связи и других устройств.
1.1.Технические данные
·Диапазон частот 1Гц÷1МГц;
·Входное напряжение 0,5÷10В;
·Класс точности 0,1%;
·Статическая индикация, количество разрядов не менее 3-х.
·Минимальная длительность импульса входного сигнала - 5нсек.
·Рабочие условия эксплуатации:
·-Температура окружающей среды -30°С ÷ +50°С;
·-Относительная влажность воздуха 95% при температуре до 35°С;
·-Атмосферное давление 61÷103 кПа.
·Среднее время наработки прибора на отказ не менее 10000 часов.
2.Принцип действия прибора
Описываемый метод измерения позволяет измерять частоты с малой и постоянной погрешностью в широком диапазоне. Измеряемый сигнал поступает на вход прибора и преобразуется в периодическую последовательность импульсов, период следования которых Тх равен периоду исследуемого сигнала. Независимо от этой последовательности формируются первые временные ворота длительностью Δt1 . Они заполняются n импульсами периодической последовательности. Затем число n фиксируется. Отношение Δt1 /n соответствует значению T´x измеряемой частоты, а величина n/Δt1 – значению f΄x частоты. Его отклонение от значения fx определяется погрешностью дискретности, уменьшение которой и является целью применения данного метода.
Рис.2: «Диаграммы работы частотомера»
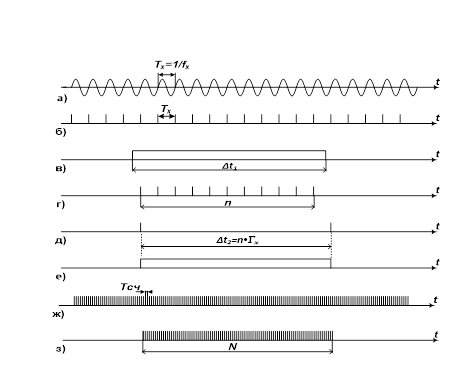
Одновременно формируются вторые временные ворота, такие, что их фронт соответствует импульсу последовательности, появившемуся сразу после начала первых ворот, а срез – импульсу, возникающему сразу после окончания первых ворот. Таким образом, длительность вторых временных ворот целому числу периодов исследуемого сигнала, т. е. Δt2 =nTx .
Фронт и срез образованных ворот синхронизированы с моментами появления импульсов периодической последовательности, сформированной из исследуемого сигнала, поэтому погрешность округления исключается. Вторые временные ворота заполняются счетными импульсами, число N которых фиксируется.
Формула для нахождения значения измеряемой частоты получают следующим образом. Число импульсов, попавшие во вторые временные ворота определяется отношением N=nTx /Tсч =nFсч /fx , откуда
 , (1)
, (1)
где Fсч – частота следования счетных импульсов, значение которой известно.
Точность измерения частоты определяется погрешностью дискретности измерения интервала времени nTx .
Можно определить значение относительной погрешности дискретности измерения частоты δf . Максимальное значение относительной погрешности дискретности измерения интервала времени Δt2 =nTx определяется через абсолютную погрешность. Так как этот интервал заполняется счетными импульсами с периодом следования Тсч , то максимальная абсолютная погрешность Δ2 =±Тсч . Тогда максимальная относительная погрешность
δ2 =±Тсч /Δt2 =±Tсч /nTx (2)
Равенство Δt2 =nTx можно представить в виде fx =n/Δt2 . Тогда в соответствии с правилами вычисления погрешностей косвенных измерений погрешность измерения функции fx связана с погрешностью измерения аргумента Δt2 соотношением (с точностью до второго порядка малости)
δf =δ2
После подстановки δ2 из (1)
δf =±Тсч /nTx =±(fx /n)Тсч (3)
При подстановке в (3) вместо fx /n отношения f'x /n=1/Δt1 получается
δf =±Тсч /Δt1 =±1/Fсч Δt1 (4)
Формула (4) приводит к выводу, что максимальное значение относительной погрешности дискретности измерения частоты изложенным вариантом метода дискретного счета не зависит от значения измеряемой частоты и, следовательно, постоянно во всем диапазоне измерения.
Необходимая при этом частота дискретизации
Fсч =1/(δf Δt1 ), (5)
где δf – заданная погрешность дискретности измерения.
К примеру, при частоте следования счетных импульсов 10 МГц и длительности временных ворот 1 с (как это имеет место в некоторых частотомерах) максимальное значение погрешности дискретности равно ±10-
Таким образом, примененный в данном проекте метод измерения позволяет проводить измерения частоты от 1 Гц до 1МГц без изменения пределов и метода измерения. Исключаются дополнительные операции контроля значения измеряемой частоты.
2.1. Функционирование основных блоков цифрового частотомера
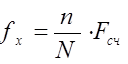
Рис.3: «Схема электрическая функциональнаяя»:
Электрическая функциональная схема прибора состоит из следующих основных узлов: микроконтроллера, входного устройства, генератора счетных импульсов, двух счетчиков, блока формирования вторых временных ворот и устройства вывода информации.
Исследуемый сигнал частотой fx (а) передается через входной блок в формирователь импульсов, где преобразуется в периодическую импульсную последовательность (б). Она поступает на первый вход временного селектора 1, ко входу 2 которого подводится вырабатываемый внутри микроконтроллера стробирующий импульс, представляющий собой первые временные ворота длительностью Δt1 =1 с (в). Входные импульсы заполняют эти временные ворота, их количество n подсчитывается счетчиком 1 и фиксируется. Стробирующий импульс, играющий роль первых временных ворот, подается с микроконтроллера также на вход 2 логического элемента «И» и на вход инвертора. Вследствие этого импульсы периодической последовательности, подводимые с выхода формирователя к входам 1 логических элементов «И1 », «И2 », могут пройти на вход 1 блока формирования вторых временных ворот, когда на входе 2 элемента «И1 » имеется стробирующий импульс. На вход 2 блока формирования они проходят, когда на входе инвертора отсутствует стробирующий импульс.
Схема формирования вторых временных ворот выполнена на RS‑триггере. Первый импульс, подводимый через логический элемент «И1 » к входу установки S схемы перебрасывает триггер в состояние логической «1», в результате на выходе схемы формируется фронт вторых временных ворот. После этого импульсы, подаваемые на вход 1 схемы формирования, состояния ее не меняют.
Пока имеется стробирующий импульс на входе инвертора, импульсы периодической последовательности не могут пройти через логический элемент «И2 ». Сразу после окончания действия стробирующего импульса первый импульс последовательности поступает через логический элемент «И2 » на вход сброса R триггера и возвращает его в исходное состояние. На выходе схемы формирования образуется срез вторых временных ворот (д, е).
Таким образом, на входе 2 временного селектора 2 получаются вторые временные ворота длительностью Δt2 =nTx , через которые проходят счетные импульсы (ж). Попавшие в ворота импульсы подсчитываются счетчиком 2, на нем фиксируется их число N.
Количество импульсов подсчитанных импульсов n и N передается микроконтроллеру. В его памяти в виде константы хранится значение частоты счетных импульсов. На основе полученных данных микроконтроллер рассчитывает значение частоты измеряемого сигнала fx в соответствии с формулой (1). Далее микроконтроллер производит соответствующие преобразования с полученным результатом, приводя его значение к виду, доступному для восприятия семисегментным индикатором. Полученный результат выводится на экран.
Получили структуру устройства и выявили ее основные составные блоки. На основании полученных результатов необходимо разработать принципиальную электрическую схему устройства, содержащую реальные электронные компоненты.
3. Описание и расчёт основных элементов схемы электрической принципиальной цифрового частотомера
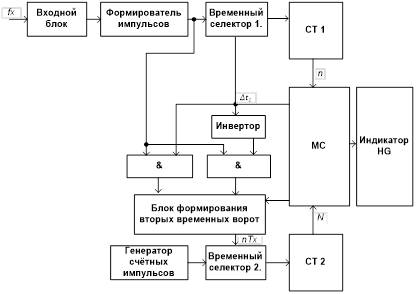
Рис.3: «Схема электрическая принципиальная»:
Главной частью прибора является микроконтроллер, без которого крайне сложно осуществить вычисления, диктуемые алгоритмом вычисления, и управление блоками прибора, а также режимами его работы.
Правильным выбором микроконтроллера во многом определяется функциональные возможности устройства, его цена, удобство и стоимость настройки и программирования.
В данной разработке предложен для использования микроконтроллер зарубежной фирмы “AtmelCorporation” – АТ89С2051. Он обладает рядом важных достоинств, что и обусловило его выбор.
Во-первых, – это его функциональные возможности. В его состав входит два 16‑разрядных таймера‑счетчика, что позволяет отказаться от использования отдельных многоразрядных счетчиков. Присутствует и канал последовательного ввода‑вывода данных (UART), который позволяет организовать интерфейс с индикатором. У него отсутствуют два порта Р0 и Р2, что позволяет уменьшить функциональную избыточность микроконтроллера.
Во-вторых, изделия этой фирмы широко распространены как на российском, так и на мировом рынке микроконтроллеров, что уменьшает стоимость маркетинговых операций.
В-третьих – это его низкая стоимость (на сегодняшний день порядка 2 долларов), что также позволяет уменьшить общую стоимость изделия.
Все указанное выше позволяет утверждать о целесообразности его применения в данной разработке.
АТ89С2051 – низковольтная, быстродействующая КМОП (CMOS) 8‑разрядная микроЭВМ. Этот контроллер, полностью программно совместимый с семейством MCS‑51. Он выпускается в 20‑выводном корпусе, что стало возможным вследствие отказа от использования линий портов Р0 и Р2, а также Р3.6. Буква Р во второй части наименования контроллера обозначает 20‑выводный корпус PDIP.
Контроллер АТ89С2051 содержит электрически перепрограммируемое ПЗУ объемом 2 Кбайт, внутреннее ОЗУ объемом 128 байт, 15 линий ввода‑вывода, два таймера‑счетчика (16 бит), шесть векторов прерываний и аналоговый компаратор. Таймеры‑счетчики полностью идентичны соответствующим узлам MCS51, АТ89С2051 имеет также стандартный для MCS51 последовательный порт. Поддерживаются режимы Idle и PowerDown. Выводы портов – сильноточные, допускающие прохождение через них тока до 20 мА (суммарный ток через все линии порта – не более 80 мА).
Напряжение питания – от 4 до 6 В.
Выводы Р1.2 – Р1.7 и порта Р3 имеют внутренние нагрузочные резисторы. Р1.0 и Р1.1 не имеют их и используются соответственно как неинвертирующий (AIN0) и инвертирующий (AIN1) входы встроенного прецизионного компаратора. Его выход соединен линией Р3.6, не выведенной из микросхемы контроллера. Линии порта Р3.0 – Р3.5 выполняют альтернативные функции: Р3.0 – RxD, P3.1 – TxD, P3.2 – INT0, P3.3 – INT1, P3.4 – T0, P3.5 – T1.
Из стандартного для контроллеров семейства MCS51 набора регистров SFR в АТ89С2051 присутствует аккумулятор, регистры B, PSW, IP, IE, TCON, TMOD, TL0, TH0, SP, PCON, DPTR, P1, P3, SCON, SBUF, TL1 и ТН1.
В принципиальной схеме частотомера можно выделить основные узлы, которые несут определенную функциональную нагрузку. Это входной блок, включающий в себя разделительные конденсаторы С5-С6, токоограничивающий резистор R1, резисторы R2-R5, конденсатор С9 и операционный усилитель DA3. Отдельно можно выделить входную логику прибора, составленную на интегральных микросхемах DD1-DD2. Функции устройства контроля и управления берет на себя микроконтроллер DD3. Источником эталонных счетных импульсов является кварцевый генератор на микросхеме DA2. Регистр сдвига DD4 служит для хранения полученного результата и связи микроконтроллера с устройством отображения информации на четырех семисегментных индикаторах HG1-HG4.
Подробнее о работе схемы.
На вход прибора подается изменяющееся напряжение, значение которого может быть 0,5‑10 вольт, а диапазон частот от 1Гц до 1МГц. Оно поступает на разделительные конденсаторы С5 – С6, которые отсекают постоянную составляющую измеряемого сигнала. При этом переменная составляющая остается без изменения. Этот сигнал полается на вход аналогового компаратора, выполненного на операционном усилителе DA3. ОУ включен без цепей обратной связи, что обеспечивает его работу в качестве компаратора. Если уровень сигнала, поступающего на его неинвертирующий вход, превышает величину напряжения, присутствующего на его инвертирующем входе, то напряжение на выходе ОУ скачком увеличится до максимально возможного. Это напряжение ненамного меньше величины его источника питания положительной полярности. И, наоборот, при условии если уровень сигнала, поступающего на его неинвертирующий вход, меньше величины напряжения, присутствующего на его инвертирующем входе, то напряжение на выходе ОУ скачком уменьшится до минимального. Минимальное значение напряжения на выходе определяется величиной его источника питания отрицательной полярности.
В данном проекте используется прецизионный быстродействующий операционный усилитель AD8055 – SOT-23-5 фирмы AnalogDevices [10]. Это недорогая микросхема, которая может работать как с двуполярным, так и с однополярным питанием. Его основные характеристики
- Граничная частота – 300 МГц.
- Скорость нарастания выходного сигнала – 1400 В/мкс.
- Шумы – 6 нВ/Гц.
- Напряжение смещения нуля (ошибки) – 5 мВ.
- Входные токи - 1,2 мкА.
Питание ОУ осуществляется однополярным источником +5 вольт. Исследуемый сигнал подается на неинвертирующий вход ОУ. Для того, чтобы он мог сравнивать как отрицательную, так и положительную полуволны входного сигнала, необходимо установить на обоих входах микросхемы постоянный потенциал, равный половине напряжения питания. Для этого служит делитель напряжения на резисторах R2 и R5. Это же напряжение подается на анод и катод соответствующего ограничительного диода. Входные токи операционного усилителя протекают через резисторы R3 и R4. Падение напряжения на этих диодах в результате протекания входных токов должно быть меньше напряжения ошибки. Конденсатор С9 уменьшает высокочастотные наводки.
Максимальное входное напряжение ОУ не должно превышать напряжение питания +5 вольт, а минимальное – быть меньше потенциала земли. Для ограничения подаваемого входного сигнала служат диоды VD1‑VD2. Если прикладываемое к диоду напряжение превысит порогового уровня, он открывается и поддерживает это напряжение на постоянном уровне. В качестве диодов выбран импульсный диод КД521Г. Его параметры
- Максимальное обратное напряжение – 30 вольт.
- Падение напряжения на открытом диоде – 1,0 вольта.
- Максимальный прямой ток – 50 мА.
- Обратный ток – 1 мкА.
- Время восстановления – 4 нс.
Таким образом, прошедшая переменная составляющая входного сигнала ограничена напряжением пробоя (открывания) ограничительных диодов, т. е. не превышает по абсолютной величине 1 вольта. Для ограничения прямого тока через диоды в пределах допустимого служит токоограничивающий резистор R1. С выхода ОУ получаем импульсную последовательность измеряемой частоты и ТТЛ-уровнями.
Эта последовательность поступает затем на вход временного селектора, выполненного на элементе «И‑НЕ» микросхемы логики DD1.
При включении микроконтроллера, он инициализирует свои счетчики Т0 и Т1 (соответственно выводы портов Р3.4 и Р3.5) в режиме подсчета внешних импульсов. При перепаде уровня входного сигнала из «1» в «0» содержимое счетчика увеличивается на единицу. Максимальная частота подсчитываемых импульсов равна 1/24 частоты тактовых импульсов контроллера, т. е. 1 МГц. С началом процесса измерения, на выводе линии порта Р3.7 программно формируется высокий логический уровень длительностью 1 с, открываются первые временные ворота. Импульсы с выхода ОУ начинают проходить через селектор 1 (DD2.2) на вход счетчика Т0, и в 16‑ти разрядном буфере счетчика TH0+TL0 фиксируется их число.
На элементах DD1.1‑DD2.1 выполнена схема формирования вторых временных ворот. Элементы DD1.4 и DD2.1 включены по стандартной схеме RS‑триггера с инверсными входами. Импульс длительностью 1 с поступает с контроллера на элемент DD1.2. Первый же импульс измеряемой частоты с операционного усилителя, подаваемый на второй вход DD1.2 изменяет состояние логического элемента, что в свою очередь приводит к смене уровня сигнала на выходе RS‑триггера из «0» в «1». Открываются вторые временные ворота. Через селектор 2, выполненный на элементе DD2.3, импульсы эталонной частоты начинают поступать с выхода кварцевого генератора на вход счетчика Т1 микроконтроллера. Количество этих импульсов начинает подсчитываться.
Кварцевый генератор счетных импульсов выполнен на основе интегральной микросхемы генератора импульсов КР531ГГ1. Частота работы микросхем этой серии – не более 50 МГц, напряжение питания +5 вольт, потребляемая мощность – не более 19 мВт. Вместо конденсатора, к входам генератора подключен кварцевый резонатор на 10 кГц, что обеспечивает высокую стабильность временных параметров счетных импульсов.
При смене состояния линии Р3.7 в логический ноль, т. е. по окончании первых временных ворот, импульсы перестают проходить через временной селектор 1, их подсчет прекращается. В микроконтроллере фиксируется количество прошедших импульсов измеряемой частоты – n.
С приходом самого первого импульса после окончания первых временных ворот на вход DD1.3, триггер изменяет свое состояние. Заканчивается формирование вторых временных ворот, и счетчик Т1 микроконтроллера фиксирует число прошедших через временной селектор 2 (DD2.3) импульсов N. Основной измерительный процесс заканчивается и остается только произвести соответствующие вычисления и получить результат в виде конкретного значения частоты. Теперь весь ход работ перекидывается на микроконтроллер.
В результате предыдущего измерительного цикла работы прибора, в памяти контроллера находятся значения прошедших импульсов n и N. Микроконтроллер производит ряд операций над двоичными числами n и N. В результате по формуле (1) вычисляет значение измеренной частоты в двоичном виде. Теперь это значение частоты необходимо перевести в привычный для человека вид и вывести на устройство отображения.
Согласно программе, производятся дальнейшие операции. Полученный результат переводится из двоичного кода в двоично‑десятичный код. Определяется предел частоты – герцы или килогерцы и выделяется значащая часть, т. е. четыре старшие цифры. Затем происходит определение места запятой в выводимом результате с учетом предела измерения. Производится преобразование полученного результата в код семисегментного индикатора. После всех операций получается результат в семисегментном коде, который занимает 4 байта (7 байт – цифра и восьмой – запятая) и два дополнительных бита – вывод предела измерения (Гц или кГц).
Для связи микроконтроллера с устройством отображения служит сдвиговый регистр М5450В7 (DD4). Его информационная емкость – 34 двоичных разряда. Ввод данных производится через последовательный интерфейс побитово, причем посылка каждого бита должна сопровождаться импульсом синхронизации, который подается на вход CLK. Частота синхронизирующих импульсов не должна превышать 50 МГц. При подаче каждого бита, предыдущие биты сдвигаются в старшие Номинал резистора R7, который включен между входами +5V и Bright, определяет значение тока, протекающего через выходные контакты. Ток через этот резистор в 50 раз меньше тока выходных ключей сдвигового регистра М5450В7. В микросхеме присутствует инверсный вход разрешения выхода ОЕ, при подаче на него логического нуля введенная информация появляется на выходе регистра.
Передача данных от микроконтроллера к сдвигающему регистру происходит при помощи последовательного интерфейса, который реализован в АТ89с2051 универсальным асинхронным приемопередатчиком. В состав приемопередатчика, называемого часто последовательным портом, входят принимающий и передающий сдвигающий регистры, а также специальный буферный регистр приемопередатчика. Запись байта в буфер приводит к автоматической перезаписи байта в сдвигающий регистр передатчика и инициирует начало передачи байта. Наличие буферного регистра приемника позволяет совмещать операцию чтения принятого ранее байта с приемом очередного. В данной схеме приемопередатчик работает в одном из 4‑х возможных режимах. В этом режиме информация передается и принимается через вход приемника (RxD). Принимаются или передаются 8 бит данных (младшим битом вперед). Через выход приемника (TxD) выдаются импульсы сдвига, которые сопровождают каждый бит. Частота передачи бита равна 1/12 частоты кварцевого резонатора, т. е. 2 мегабита в секунду.
Таким образом, полученный результат (34 бит) загружается последовательно по 1 байту в буфер приемопередатчика и передается в сдвиговый регистр. После передачи всей информации на выходе порта Р1.0 микроконтроллера появляется уровень логического нуля и таким образом разрешается индикация результата.
Индикация осуществляется семисегментными индикаторами АЛ316а. Это индикаторы с общим катодом, обдающие достаточно высоким уровнем светоотдачи сегментов, имеющие большие цифры, а также небольшой потребляемый ток.
Высокая точность частотомера обеспечивается стабильностью передаточных характеристик всех звеньев аппаратуры, которые в первую очередь зависят от стабильности питающего напряжения. Для фиксации напряжения питания данного аппаратурного блока применяется интегральный стабилизатор напряжения. В настоящее время для построения радиоэлектронной аппаратуры находят применение универсальные стабилизаторы и стабилизаторы с фиксированным выходным напряжением. Стабилизаторы с фиксированным выходным напряжением (их иногда называют трехвыводными) имеют внутреннюю схему делителя и настраиваются на стандартный ряд питающих напряжений в процессе изготовления микросхемы. В серию К142 входят стабилизаторы с фиксированным рядом выходных напряжений, например К142ЕН5 – на 5 вольт. Входное напряжение подается на вывод 1, а выходное снимается с вывода 3. В схеме имеется защита от перегрузки по выходу. Получена принципиальная схема всего проектируемого устройства и описан принцип ее работы. Теперь необходимо произвести общий расчет всех дискретных элементов присутствующих в схеме, а также произвести выбор их типономиналов.
3.1. Расчет конденсаторов индивидуальной развязки
При проектировании цифровых схем необходимо учитывать импульсные помехи в цепях питания, которые обусловлены, в основном, кратковременным возрастанием токов потребления интегральных микросхем при переключении из одного логического состояния в другое и динамическими токами перезаряда паразитных емкостей сигнальных линий связи. Уменьшение импульсных помех в цепях питания достигается применением индивидуальных конденсаторов развязки. Идея применения конденсаторов развязки для уменьшения импульсных помех заключается во введении для каждой интегральной схемы источника энергии, роль которых выполняют конденсаторы с малой собственной емкостью (как правило, керамические КМ5, К10‑9). Эти конденсаторы в промежутках между переключениями микросхем заряжаются до номинального уровня напряжения источника питания, а во время переключения ИС из одного логического состояния в другое разряжается на небольшое значение напряжения, отдавая ток перезаряда переключаемой микросхеме. Другими словами, индивидуальные конденсаторы развязки позволяют локализовать протекание динамических токов потребления в рамках цепи микросхема – индивидуальный конденсатор развязки.
Выбор емкости конденсаторов производится из условия равенства заряда, накопленного конденсатором между переключениями логического элемента, заряду, переносимому за время переключения. При этом напряжение на конденсаторе не должно превышать некоторого наперед заданного значения, равного допустимой помехе по шине питания. Конденсаторы для подавления высокочастотных пульсаций в цепях питания размещают по площади печатной платы равномерно относительно микросхем из расчета один конденсатор емкостью 0,02 мкФ на группу, содержащую не более 10 микросхем. Для микросхем повышенной степени интеграции емкость увеличивают до 0,1 мкФ и устанавливают конденсаторы около каждой микросхемы. Из этих соображений взяты конденсаторы С1‑С4типа К10‑9 номинальной емкостью 100 нФ ± 10%. С1‑С4: К10‑9 – 20 В – 100 нФ ±20%
Выбор конденсаторов групповой развязки по питанию.
Из-за бросков тока в системе питания могут возникать «медленные» колебания напряжения. При правильно спроектированной цепи питания (включение больших электролитических конденсаторов) эти колебания носят затухающий характер. Для снижения низкочастотных пульсаций в шинах питания применяют блокирующие конденсаторы, включаемые между выводами «питание» и «земля» около разъема питания печатной платы. Если же емкость выбрана неправильно. В цепи могут достаточно долго идти колебания. С целью предотвращения таких явлений включают электролитические конденсаторы большой емкости. С7 и С8 – алюминиевые электролитические К53‑16, предназначены для подавления помех в цепях постоянного и пульсирующего тока. Их емкость – 10 мкФ.
Расчет элементов входной цепи
Водная цепь устройства должна обеспечивать свободное прохождение переменной составляющей измеряемого сигнала и при этом обеспечивать требуемый режим работы.
Постоянный резистор R1 на входе прибора служит для задания токов, протекающих через ограничивающие диоды VD1 и VD2, т. е. значение номинала этого резистора определяет токи диодов в открытом состоянии. У выбранных диодов КД521Г максимально возможная величина протекающего через них тока в прямом направлении должна составлять не более 20 мА. Тогда максимальный ток через диод
![]() , (6)
, (6)
где Iпр – ток, протекающий через диод в открытом состоянии, А; Umax – наибольшее значение максимальной величины входного напряжения, В; Uпр – падение напряжения на открытом диоде, В; R1 – необходимое значение номинала ограничительного резистора.
Можно вычислить R1
![]() , (7)
, (7)
При подстановке соответствующих числовых значений
![]() (Ом)
(Ом)
Значение резистора из стандартного ряда R1=500 Ом. Мощность, рассеиваемая резистором PR1
![]()
![]()
Численное значение
![]() (Вт)
(Вт)
В качестве R1 берется металлопленочный резистор С2‑33и, применение которого допускается на частотах, заданных в техническом задании.
R1: C2-33и – 0,25 – 500 ±5%
Резисторы R5 и R5 образуют простой делитель, напряжение в средней точке которого должно быть равно 2,5 вольт. С одной стороны, для уменьшения потребляемой мощности необходимо, чтобы значение этих резисторов были как можно больше. С другой стороны, ток, протекающий через делитель, должен быть много больше, чем токи через открытые диоды для обеспечения их необходимо величины. Обычно задаются током делителя в 5‑10 раз больше тока открытого диода. Пусть ток делителя Iдел =100 мА, тогда
![]() (Ом)
(Ом)
Мощность, рассеиваемая каждым резистором
![]() (Вт)
(Вт)
Резисторы необходимо взять с запасом по мощности, а их номинал – из стандартного ряда.
R2: С2‑33и – 0,5 – 27 ±5%
R5: С2‑33и – 0,5 – 27 ±5%
Так как источник измеряемого сигнала и операционный усилитель в данном случае являются развязанными по постоянному току, то необходимо предусмотреть заземление входов. Резисторы R3 и R4 служат тем путем, по которому текут входные токи операционного усилителя. Значение их номиналов должно быть таким, чтобы падение напряжения на этих резисторах при протекании входных оков не вызывало ложного срабатывания компаратора. Минимальная чувствительность данного интегрального усилителя составляет Uсм =5 мВ, а входные токи Iвх порядка 1,2 мкА. Значит, для оценки значения резисторов можно воспользоваться формулой
![]() (кОм)
(кОм)
Номиналы обоих резисторов выбираются из стандартного ряда.
R3: С2‑33и – 0,125 – 4,2 кОм ± 5%
R4: С2‑33и – 0,125 – 4,2 кОм ± 5%
Входные конденсаторы С5 и С6 выбираем такими, чтобы постоянная времени входной цепи (С5+С6)∙(R1+R3) была больше половины периода входного сигнала минимальной частоты. Из этих соображений выбираем С5 и С6 равными 150 мкФ.
С5: К53‑7– 15В – 150 мкФ ±20%
С6: К53‑7– 15В – 150 мкФ ±20%
На неинвертирующем входе операционного усилителя могут наблюдаться броски напряжения, наводиться импульсные помехи, а это, в свою очередь, будет способствовать неустойчивой работе компаратора и может приводить к ложным срабатываниям. Все эти явления носят случайный характер и в сильной степени зависят от условий эксплуатации прибора и близости бытовых и индустриальных помех, но при этом могут оказать довольно сильное влияние на точность измерений и их достоверность. Для устранения влияния этой причины неинвертирующий вход операционного усилителя подсоединяется к земле через конденсатор небольшой емкости С9. Этот конденсатор играет роль источника постоянного напряжения при коротких бросках тока. Номинал емкости этого конденсатора выбирается равным 50 нФ. С9: К10‑9 – 16 В – 50 нФ ±20%
Если подача питающего напряжения не сопровождается достоверным сбросом (т.е. удержанием единичного уровня на входе RST в течении 24 периодов колебаний резонатора), то микро‑ЭВМ может начать выполнение программы до того, как в регистры специальных функций будут занесены начальные значения. При этом нельзя гарантировать, корректность выполнения программы. Следовательно, микроконтроллер должен иметь цепи, обеспечивающие автоматическое формирование сигнала сброса при включении питания. Инициализация (сброс) микроконтроллера осуществляется сигналом RST (активный высокий уровень напряжения) при условии подачи на микросхему внешнего сигнала синхронизации при подключенном кварце. Вход RST является входом внутреннего триггера Шмидта. Для того, чтобы сброс микросхемы гарантированно произошел, длительность сигнала высокого уровня на входе RST должна быть не меньше двух машинных циклов микро-ЭВМ.
При подаче питания на входе RST DD3 появляется напряжение высокого уровня. По сигналу сброса внутренний алгоритм однокристального микроконтроллера производит следующие действия:
- устанавливает счетчик команд PC и все внутренние регистры специальных функций, кроме защелок портов Р0 — Р3, указателя стека SP и регистра SBUF, в ноль;
- указатель стека принимает значение, равное 07Н;
- запрещает все источники прерываний, работу таймеров/счетчиков и последовательного порта;
- в регистрах специальных функций PCON, IP и IE резервные биты принимают случайные значения, а все остальные биты сбрасываются в ноль;
- в регистрах SBUF устанавливаются случайные значения;
- устанавливаются фиксаторы ‑ защелки портов Р0 — Р3 в «1» РРРРррРРРHHffd.
Сигнал сброса на входе RST не влияет на внутреннее ОЗУ данных. После включения питания содержимое ячеек внутреннего ОЗУ данных принимает случайные значения. Автоматическое формирование сигнала сброса при включении питания может быть достигнуто подсоединением вывода RST к шине питания через конденсатор С12 емкостью 10 мкФ и к общему проводу через резистор сопротивлением 8,2 кОм. При включении питания подобная цепь удерживает высокий уровень на входе RST в течении времени, которое зависит от емкости конденсатора С12 и уровня, до которого он заряжен. Практика показывает, что при включении питающее напряжение достигает своего номинального значения как правило, примерно за 10 мс. При использовании кварцевого резонатора с частотой 24 МГц оно не превышает обычно 1 мс. Следовательно постоянная времени RC‑цепи, соединенной с выводом RST, должна превышать указанный временной интервал. При формировании сигнала сброса указанным способом резкое падение напряжения питания вызывает мгновенное понижение напряжение на выводе RST ниже 0. Однако в микро-ЭВМ есть ограничительные диоды, и эти броски напряжения не выводят ее из строя.
С12: К10‑9 – 20 В – 10 мкФ ±20%
R6: С2‑33и – 0,125 – 8,2 кОм ±5%
Встроенный тактовый генератор микроконтроллера представляет собой обычный инвертор, предназначенный для использовании в качестве элемента с положительным резистивным сопротивлением в цепи обратной связи. Роль реактивного сопротивления играет кварцевый резонатор. Емкость конденсаторов С10, С11 особой роли не играет. При использовании кварцевого резонатора их рекомендуемые номиналы 30 пФ.
С10, С11: К10‑9 – 20 В – 30 пФ ±20%
Номинал резистора R7 определяет ток семисегментных индикаторов, т.к. ток протекающий через этот резистор должен быть в 50 раз меньше тока выходных ключей регистра DD4. Номинальный ток индикаторов – 15мА, отсюда следует
![]() (Ом)
(Ом)
Мощность, рассеиваемая на резисторе R7
![]() (мВт)
(мВт)
Номинал резистора R7 выбирается из стандартного ряда
R7: С2‑33и – 0,125 – 16 кОм ±5%
Конденсатор С13 – фильтрующий, против помех
С13: К10‑9 – 16 В – 50 нФ ±20%
3.2. Расчет потребляемой мощности .
Для того, чтобы можно было обеспечить проектируемый прибор подходящим источником электропитания, необходимо узнать мощность, которую данный прибор будет потреблять при своей работе. Эта мощность складывается из нескольких основных составляющих.
- Во-первых, это мощность, которая рассеивается при протекании тока через постоянные резисторы. Это бесполезно расходуемая мощность, которая рассеивается в окружающее пространство и выделяется в виде тепла.
- Во-вторых, это мощность, потребляемая как семисегментными индикаторами, так и светоизлучающими диодами. Эта энергия идет на излучение в видимой части электромагнитного спектра и позволяет пользователю измерительного прибора судить о результатах измерения.
- В-третьих, это мощность, которая потребляется интегральными микросхемами во время своей работы. Значение этой мощности приведено в соответствующих справочниках, а при отсутствии этих данных ее можно рассчитать исходя из значений потребляемого тока и напряжения питания.
Мощность, рассеиваемая резисторами .
Резисторы R2, R5 образуют делитель напряжения, и через них протекает постоянный ток, определяемый напряжением питания и номиналами этих резисторов
![]() , (8)
, (8)
где PR – мощность, рассеиваемая резистором, Вт; UR – напряжение на резисторе, В; R – сопротивление резистора, Ом.
Мощность на резисторе R2
![]() (Вт)
(Вт)
Мощность, выделяемая на резисторе R5, также равна 0,23 Вт.
При протекании водных токов операционного усилителя через резисторы R3 и R4, на них также рассеивается определенная мощность.
![]()
Видно, что эта мощность практически равна нулю, и ею можно пренебречь.
Постоянный резистор R7 задает токи выходных ключей сдвигового регистра DD4. Мощность, рассеиваемая на нем рассчитывается по формуле (8)
![]() (Вт)
(Вт)
Суммарная мощность, рассеиваемая резисторами, может быть оценена
![]() (Вт)
(Вт)
Далее целесообразно рассмотреть потребляемую мощность интегральных микросхем. Результаты сведены в таблицу.
Полная мощность, потребляемая всеми микросхемами РМ∑ может быть оценена
![]() , (9)
, (9)
где PDAx , PDDx – мощность, потребляемая соответствующей аналоговой или цифровой микросхемой. Численные значения
![]() (мВт)=1,625 (Вт)
(мВт)=1,625 (Вт)
В общую потребляемую мощность входит также мощность, которая расходуется на индикаторах. Каждый сегмент индикатора потребляет мощность ![]() ,
,
где Iпр – прямой ток через p ‑ n переход, мА; Uпр – падение напряжения на открытом переходе, В. Значение мощности получается в милливаттах.
У каждого семисегментного индикатора АЛС332Г имеется 8 сегментов с Iпр =20 мА и Uпр =2,5 В. Значит один индикатор потребляет 8∙20∙2,5=400 мВт. На светодиодах VD3, VD4 рассеивается мощность 20 мВт. Суммарная потребляемая мощность всех индикаторов Ринд∑
![]() ,
,
где РHGx , PVDx – потребляемая мощность соответствующего семисегментного индикатора и светодиода. Числовое значение
![]() (мВт)
(мВт)
В итоге стали известны все составляющие общей мощности, которая потребляется всем прибором и теперь можно высчитать ее численное значение
![]() (мВт)≈ 3,8 (Вт)
(мВт)≈ 3,8 (Вт)
Максимальная мощность, потребляемая прибором составляет, около 3,8 Вт.
3.3.Алгоритм работы микроконтроллера
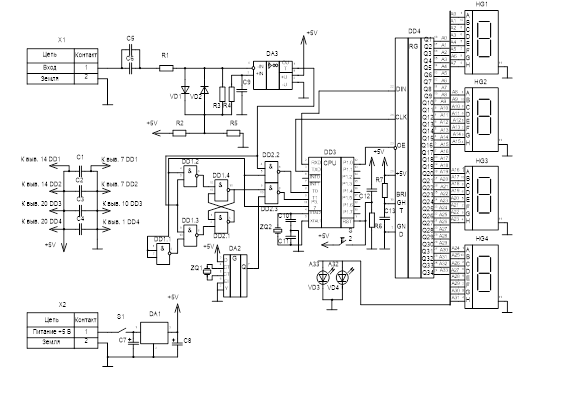
Рис.4: «Блок-схема работы микроконтроллера»:
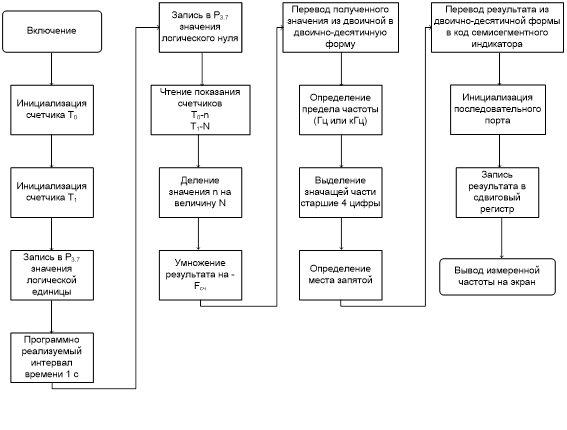
Управление работой всей системы происходит с помощью микроконтроллера. Последовательность действий микро-ЭВМ задает программа, записанная во внутренней памяти контроллера. Общая схема работы микроконтроллера такова.
При включении, срабатывает встроенный алгоритм сброса микросхемы. Значение всех регистров устанавливается в начальное состояние, запрещается обработка прерываний. Затем начинается выполнение зашитой программы по алгоритму, указанному в Приложении 5. Далее по программе происходит инициализация и установление режимов работы обоих счетчиков Т0 и Т1 посредством записи соответствующих значений в биты специальных регистров TMOD и TCON. Также установление необходимого бита в регистре режима прерываний EI разрешает микроконтроллеру выполнять программу обработки прерывания по переполнению счетчика T0. Запрещается индикация установлением на выводе Р1.0 уровня “1”.
На выводе порта Р3.7 устанавливается значение логической единицы, т.е. формируются первые временные ворота. Затем выполняется программа формирования временной задержки длительностью 1 с. Во время этого интервала счетчики производят подсчет импульсов, поступающих на их входы. Содержимое двухбайтовых регистров Т0 и Т1 увеличивается. Если при высокой частоте количество импульсов, пришедших на вход счетчика Т0, превысит емкость регистра, то происходит выполнение обработки прерывания по переполнению и содержимое дополнительного регистра инкрементируется. Это позволяет микроконтроллеру произвести подсчет 224 импульсов. По прошествии одной секунды, на выводе Р3.7 устанавливается “0” и формирование временных ворот заканчивается. Счетчики прекращают счет. В результате получены значения числа импульсов n и N.
Затем микроконтроллер выполняет операцию деления двоичных чисел n и N. Число импульсов n в общем случае трехбайтное, а N – двухбайтное около 10000dec . Так как в микроконтроллере реализована операция деления более чем восьмибитных чисел, то необходимо применять специальный алгоритм, выполняющий деление. В результате получается число, целая часть которого содержится в регистре R3, а дробная – в регистре R4.
Для получения окончательного результат необходимо умножить это число на коэффициент Fсч =10000.
Полученное значение частоты необходимо привести к виду, годному для вывода на индикаторы.
Результат переводится из двоичной формы в двоичнo‑десятичную и определяется предел частоты, т.е. как будет выводится результат – в герцах или в килогерцах. Выделяется та часть числа, которая будет выведена на семисегментные индикаторы, необходимо получить четыре значащих цифры. Определяется местоположение запятой. Теперь необходимо перевести число из двоично-десятичного кода в код семисегментного индикатора. Это производится при помощи таблицы соответствия, зашитой в памяти микроконтроллера.
Полученные данные нужно вывести на индикатор.
Производится инициализация последовательного порта ввода‑вывода путем записи определенных значений в соответствующие биты специального регистра SCON. Вывод ведется в синхронном режиме последовательным кодом младшими битами вперед. Запись байта в специальный буфер SBUF приемопередатчика приводит к автоматической перезаписи байта в сдвигающий регистр передатчика и инициирует начало передачи байта. В этом режиме информация и передается и принимается через внешний вывод входа приемника RxD. Передается восемь бит данных. Через внешний вывод выхода передатчика TxD вдаются импульсы сдвига, которые сопровождают каждый бит. Частота передачи бита информации равна 1/12 частоты резонатора. Таким образом выводится весь результат, который запоминается в сдвиговом регистре DD4.
На выход порта Р1.0 записывается логический ноль, что разрешает вывод информации на индикаторы. Измерение произведено. При желании, микроконтроллер можно перевести в режим пониженного энергопотребления PowerDown.
4. Расчёт надежности
Микросхемы стали основной элементной базой современной РЭА прежде всего благодаря своей высокой надежности. Надежность зависит от многих факторов: совершенства разработки электрической схемы и конструкции, физико-химической совместимости материалов, отработанности и стабильности технологического процесса изготовления, методов контроля качества.
Групповой способ изготовления десятков тысяч микросхем в едином технологическом цикле, в строго контролируемых технологических средах и режимах обеспечивает примерно равную надежность как всех кристаллов в партии микросхем, так и элементов в каждом из кристаллов.
Как известно, одним из основных источников отказов аппаратуры являются межсоединения плат и комплектующих изделий. Внутри микросхемы соединение элементов между собой осуществляется методом осаждения пленок металлов, а соединение элементов с выводами корпуса – методом термокомпрессионной или ультразвуковой микросварки. Эти методы обеспечивают надежное сцепление с поверхностью кристалла и другими пленками и соединение металлов на молекулярном уровне. Число межсоединений на кристалле в тысячи раз превышает число выводов корпуса микросхем. Для большинства типов микросхем характерно низкое потребление мощности. При малой мощности рассеяния рабочая температура кристалла по сравнению с температурой окружающей среды повышается незначительно, поэтому создаются благоприятные условия для замедления физико-химических процессов, приводящих к отказу.
Применение высоконадежных микросхем не всегда автоматически обеспечивает выпуск столь же надежной аппаратуры. Сохранение надежности микросхем в аппаратуре в значительной степени определяется соблюдением рекомендаций по их конструктивно-технологическому применению, режимам и условиям работы.
Реальный уровень надежности микросхем проявляется лишь при эксплуатации аппаратуры. Часто безотказность микросхем различных серий (их изготавливают на разных заводах) практически одинакова в приборах, изготовленных на одном и том же предприятии-изготовителе РЭА. Однако, как показывает статистика, надежность микросхемы одной и той же серии (одного предприятия) оказывается весьма различной в составе комплектов аппаратуры, изготовленных разными заводами. Это следствие различия технологической культуры производства аппаратуры.
Достижение и поддержание максимальной эксплуатационной надежности микросхем (следовательно, и аппаратуры) существенно зависят от проектирования аппаратуры, подготовки производства и наладки оборудования, квалификации персонала, обработанности технологического процесса изготовления аппаратуры, использования средств защиты микросхем от статического электричества, тепловых и других воздействий.
Свойство электронной аппаратуры выполнять возложенные на нее функции, сохраняя свои эксплуатационные показатели в течение заданного промежутка времени в пределах, установленных в техническом задании или технических условиях, называется надежностью.
Надежность аппаратуры обычно связывается с понятиями работоспособности, безотказности, ремонтопригодности и долговечности.
Под работоспособностью понимается состояние, при котором она способна выполнять возложенные функции с параметрами, установленными требованиями технической документации.
Свойство сохранять работоспособность в течение некоторого времени наработки без вынужденных простоев называется безотказностью.
Поскольку большинство типов электронной аппаратуры эксплуатируется длительное время, многократно включаются и выключаются, то возможные случаи нарушения состояния работоспособности сопровождаются ремонтом. Поэтому надежность аппаратуры оценивается так же ремонтопригодностью. Надежность аппаратуры на ряду со свойствами безотказности и ремонтопригодности определяется так же свойством долговечности – сохранением работоспособности в течение срока эксплуатации.
Показателями долговечности являются технический ресурс и срок службы.
В соответствии с расчетной схемой вероятность безотказной работы системы определяется как произведение вероятностей безотказной работы отдельных элементов:
![]()
где, n – количество элементов в схеме;
Pi – вероятность безотказной работы i-го элемента схемы.
Для элементов, используемых в разработанном устройстве из справочных данных статистической интенсивности отказов, следующие величины представлены в таблице 7.1.
Таблица 7.1.
| Наименование элементов | Кол-во элементов | Интенсивность отказов |
| Микросхема серии КР531ГГ1 | 1 | |
| Микросхема серии КР142ЕН5А | 1 | |
| Микросхема серии AD8055 | 1 | |
| Микросхема серии К1533ЛА3 | 2 | |
| Микросхема серии AT89C2051 | 1 | |
| Микросхема серии M5450B7 | 1 | |
| Диоды | 4 | |
| Резисторы | 7 | |
| Конденсаторы | 13 | |
| Резонаторы | 2 | |
| Паяльные соединения | 416 |
Тогда общая интенсивность отказов:
λобщ = (1· 3,6 + 1· 3,8 + 1 · 3,8 + 2 · 3,8 + 1 · 3,4 + 1 · 4,0 +
+4· 0,4 + 7· 0,4 + 13 · 3,0 + 2· 0,4 + 416 ·0,4) · 10![]() =
=
= 0,9398 · 10![]()
Среднее время наработки на отказ рассчитывается по формуле:
 час.
час.
Вероятность безотказной работы прибора рассчитывается по формуле:
![]() ,
,
где, Тk – время контроля (500 ч.).
Вероятность безотказной работы прибора составляет:
![]()
Произведенный расчет надежности показала, что проектируемый программно-управляемый частотомер имеет среднее время наработки на отказ 10640,56 часов (по техническому заданию не менее 10000 часов), вероятность безотказной работы 0,95.
5. Требования безопасности
Конструктивное исполнение устройства в соответствии с ГОСТ 12.1.006-87 должно обеспечивать его пожарную безопасность в аварийном режиме и при нарушении правил эксплуатации.
6. Маркировка
Маркировка устройства должна соответствовать комплекту конструкторской документации и ГОСТ 26828-86.
Маркировка клемм подсоединения должна проводиться в соответствии с электрической принципиальной схемой устройства.
Способ и качество маркировки должны обеспечивать четкость и сохранность ее в течение всего срока службы устройства.
Маркировка потребительской тары должна соответствовать требованиям ГОСТ 26828-86
7. Упаковка устройства
Способ упаковывания устройства, паспорта, памятки, комплекты принадлежностей, подготовка их к упаковыванию, потребительская, транспортная тара и материалы, применяемые при упаковывании, порядок размещения и маркировка должны соответствовать комплекту конструкторской документации и ГОСТ 26828-86. ГОСТ 23170-78. ГОСТ 9.014-78.
БИ, БФ, паспорт с памяткой и комплектом принадлежностей, должны быть помещены в пакеты из полиэтиленовой пленки ГОСТ 10354-82. Края пакетов должны быть заварены.
БИ, БФ, паспорт с памяткой и комплектом принадлежностей в полиэтиленовых пакетах должны быть помещены в потребительскую тару – коробку из картона по ГОСТ 12301-81.
На ящик должна быть наклеена этикетка, выполненная согласно конструкторской документации, внутрь каждого ящика должен быть помещен упаковочный лист, содержащий следующие данные:
- наименование и обозначение устройства;
- количество мест в партии;
- номера;
- дату упаковывания;
- подпись или штамп ответственного за упаковывание.
Транспортная тара внутри должна быть выстлана бумагой битумированной ГОСТ 515-77. Промежутки между потребительской тарой и стенками ящика должна быть заполнены обрезками картона.
Упаковка должна обеспечивать сохранность устройства на весь период транспортирования, а также его хранение в течение установленного срока.
Масса брутто должна быть не более 8 кг.
8. Транспортировка и хранение
В упакованном виде изделие может транспортироваться речным, воздушным, автомобильном железнодорожном видами транспорта.
Транспортирование должно производится в соответствии с требованиями, изложенными в следующих документах: «Правила перевозки грузов», утвержденными Министерством речного флота; «Руководство по грузовым перевозкам на внутренних воздушных линиях», утвержденными Министерством гражданской авиации; «Общие правила перевозки грузов автотранспортом», утвержденными Министерством автомобильного транспорта; «Правила перевозки грузов», утвержденными министерством путей сообщения (МПС).
Транспортирование железнодорожным транспортом должно производиться в крытых вагонах или контейнерах, при этом крепление грузов должно производиться в соответствии с «Техническими условиями погрузки и крепления грузов», утвержденными МПС.
Изделия должны храниться на стеллажах в закрытых вентилируемых помещениях при температуре окружающей среды от +15 °С до +40 °С и относительной влажности до 80 % и отсутствии в окружающей среде агрессивных примесей.
Литература
1. «Дипломное проектирование. Методические указания для студентов специальности Информационно-измерительная техника и технология». МГОУ, 2004 год.
2. Контрольно-измерительная техника. Под ред. Б.И. Горбунова. - М.: Высшая школа, 1987 г.
3. Хромой Б.П., Моисеев Ю.Г. Электрорадиоизмерения: Учебник для техникумов. – М.: Радио и связь, 1985 г.
4. Ермолаев Р.С. Цифровые измерительные приборы. Л., «Энергия», 1981г.
5. Попов В.С. Электрические измерения. Учебник для техникумов. – М.: «Энергия», 1984 г.
Похожие рефераты:
Автоматизированная система защиты и контроля доступа в помещения
Энергонезависимая память для телевизоров седьмого поколения
Энергосбережение на современном этапе
Компенсация реактивной мощности в системах электроснабжения с преобразовательными установками
Проект новой подстанции для обеспечения электроэнергией нефтеперерабатывающего завода
Лекции по твердотельной электронике
Синхронные машины. Машины постоянного тока
Разработать лабораторный стенд для испытания устройств защиты судовых генераторов
Модернизация релейной защиты на тяговой подстанции Улан-Удэ на базе микропроцессорной техники
Анализ и моделирование биполярных транзисторов
Техническая диагностика средств вычислительной техники
Ответы к Экзамену по Микропроцессорным Системам (микроконтроллеры микрокопроцессоры)