| Похожие рефераты | Скачать .docx |
Дипломная работа: Измеритель шума
АНОТАЦІЯ
Дипломний проект оформлений у вигляді пояснювальної записки, що містить 99 аркушів, ілюстрацій і графічної частини - 7 аркушів формату А1.
Дипломний проект присвячений розробці універсального пристрою для вимірювання характеристик акустичного оточення, що може працювати як і у автономному режимі, так і у режимі інтелектуального датчика. Використання комп'ютера дозволяє робити обробку отриманої інформації, а також її зберігання з ефективним використанням запам'ятовувальних пристроїв.
Розробка виконана з використанням імпортної елементної бази.
ANNOTATION
The degree project is made out as an explanatory note containing 99 sheets, illustrations and a graphic part containing 7 sheets of А1 format.
The degree project is devoted to development of the device for acoustic environment measuring. It functions as in autonomous mode as in intellectual sensor mode.
Using of a computer allows to make processing of the received information, and its storage with an effective utilization of storage devices.
Development is executed with use of import element base.
ЗМІСТ
Вступ………………………………………………………………………...7
1. Вимоги до характеристик вимірювача шуму………………………..8
1.1. Аналіз характеристик типових вимірювачів шуму………………….8
1.2. Вимоги до сучасних вимірювачів шуму…………………………….12
2. Вибір та обґрунтування технічних рішень ………………………….21
2.1. Проектні рішення вимірювача шуму……… ………………………..21
2.2. Розрахунок джерела напруги……… ………………………………...30
2.3. Розрахунок підсилювача……………………… …… ………………..31
2.4. Можливості оператора…………………………… …… …………….34
2.5. Розрахунок надійності………………………… … …………………..41
3. Помилки вимірювання шумових характеристик…… ……………..44
3.1. Класифікація вимірів по точності……………… ………………….44
3.2. Помилки, пов’язані з частотною характеристикою чутливості
вимірювача шуму………………………………………………………47
3.3. Помилки, пов’язані з чутливістю селективного вимірювального тракту………………………………………………………………………….49 3.4. Помилки, пов’язані з направленістю мікрофона…… ………………...50
3.5. Помилки, пов’язані з характеристикою детектора……………………51
3.6. Помилки, пов’язані зі звуковим полем………………………………...52
3.7. Помилки, пов’язані з акустичними завадами…… ……………………56
3.8. Методи зменшення помилок вимірювання шуму…… ………………58
4. Економічна частина…… ………………………………………………..60
4.1. Аналіз ринку…………… ……………………………………………….60
4.2. Оцінка рівня якості виробу……… …………………………………….65
4.3. Оціка конкурентноспроможності виробу…… ………………………...70
4.4. Розрахунок собівартості системи вімірювання шуму……… ………..71
 |
4.5. Основна заробітна плата…………………………………………...……...73
4.6. Нижня межа ціни…………………………………………………………..77
4.7. Визначення мінімального обсягу виробництва продукції…………………..78
5. Охорона праці………………………………………………………………81
5.1. Вступ …………………………………………………………………….....81
5.2. Санітарно-гігієнічна оцінка приміщення …………………………………..81
5.3. Аналіз шкідливих виробничих факторів при виконанні роботи, і розробка
інженерних рішень для їх нормалізації… ……… … …………………..83
5.3.1. Мікроклімат…………………………… …… … ………………………..83
5.3.2. Освітлення робочої зони…………………………… ……………………..84
5.3.2.1. Природне освітлення……………………… …………………………….85
5.3.2.2. Штучне освітлення………………………… ……………………………89
5.3.3. Електромагнітні та електростатичні поля ВДТПЕОМ…………… ……...90
5.4. Електробезпека …… ………………… …………….………………92
5.5. Пожежна безпека…………………… ………………… …………...93
5.6. Висновки…………………… ……………………… …… …………94
Висновки…………………… ……………………………………………...96
Література…………………… ………………………………… ………..97
 |
ВСТУП
Шум є важливим аспектом сучасного життєвого середовища. Для людини фактор шуму грає не останню роль у житті. Дослідженнями доведено, що навіть шум помірної інтенсивності, погіршує працездатність, особливо при розумовому навантаженні. Негативний вплив шуму сильніший, якщо вище його тональність, тривалість впливу та неоднорідність спектрального складу (в результаті імпульсних складових й окремих включень чистого тону).
Під тривалим впливом сильного шуму від 90 дБ і вище можуть виникати в людини порушення слуху, розлад нервової системи. Також шум сприяє захворюванням серцево-судинної системи. В останні роки з'явився навіть спеціальний термін «шумова хвороба».
На сучасних підприємствах спостерігається тенденція збільшення потужності виробничого встаткування, швидкості руху його частин, підвищення ступеня механізації виробничих процесів, а також впровадження в технологію виробництва різних коливальних процесів. Все це приводить до збільшення інтенсивності й часу впливу шуму на людину.
Для органів санітарної інспекції та служби охорони праці боротьба з усіма видами шумів - виробничими, вуличними, побутовими - обумовлює одну з найважливіших функцій на підприємствах. Відповідно, виробництва де рівень шуму перевищує припустимі норми, підпадають під категорію шкідливих.
Вимірювання шумових характеристик здійснюють за допомогою спеціальних приладів - шумомірів. Шумомір являє собою автономний переносний прилад, який дозволяє вимірювати безпосередньо в децибелах рівні інтенсивності звуку в широких межах відповідно до стандартних рівнів. Сучасні прилади укомплектовані додатково ще й програмним  забезпеченням, за допомогою якого можна аналізувати та зберігати статистичні данні на ПК.
забезпеченням, за допомогою якого можна аналізувати та зберігати статистичні данні на ПК.
1. Вимоги до характеристик вимірювача шуму.
![]() 1.1. Аналіз характеристик типових вимірювачів шуму
1.1. Аналіз характеристик типових вимірювачів шуму
Вимірювальна апаратура
Шум машин може вимірюватися різними приладами. З декількох послідовно з'єднаних приладів утвориться так званий вимірювальний тракт. Залежно від умов проведення вимірів, способу реєстрації одержуваних результатів і інших обставин кількість приладів, що входять у вимірювальний тракт, може змінюватися в широких межах. У найбільш загальному виді застосовувані на практиці тракти для виміру шуму  представлені на рис. 1.1. Блок-схема універсального вимірювального тракту
представлені на рис. 1.1. Блок-схема універсального вимірювального тракту
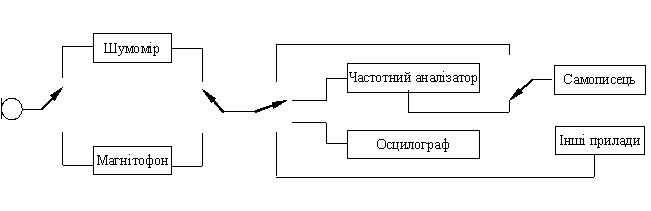
Рис. 1.1
Прилади, зазначені в блок-схемі, дозволяють вимірювати рівні звукового тиску шуму; рівні звуку; спостерігати на екрані осцилограми значення звукового тиску шуму; реєструвати зміни рівня звукового тиску в часі; досліджувати частотні спектри шуму та реєструвати спектрограми; досліджувати статистичні характеристики шумів (якщо в числі інших приладів є відповідний статистичний аналізатор) і інші характеристики. Застосування додаткових методів обробки результатів вимірів дає можливість також визначати рівні звукової потужності джерела шуму й характеристики направленості його випромінювання.
Зображені на рис. 1.1. перемикачі показують різні варіанти з'єднання приладів. Найчастіше ці з'єднання здійснюються екранованими кабелями зі штекерами на кінцях. Іноді два або три прилади поєднуються в загальному корпусі, що спрощує користування ними, оскільки при цьому кабельна комутація заміняється внутрішніми постійними лініями, позначеними перемикачами. Наприклад, часто поєднуються шумомір і частотний аналізатор; існують прилади, у яких, крім названих блоків, входить самописний реєстратор рівня або осцилограф.
 У більшості випадків при визначенні шумових характеристик можна обмежитися шумоміром і частотним аналізатором, іноді цей комплект доповнюється самописцем. В деяких випадках шум може бути попередньо записаний на носій інформації та надалі, вже в лабораторних умовах, проаналізований на стаціонарній апаратурі.
У більшості випадків при визначенні шумових характеристик можна обмежитися шумоміром і частотним аналізатором, іноді цей комплект доповнюється самописцем. В деяких випадках шум може бути попередньо записаний на носій інформації та надалі, вже в лабораторних умовах, проаналізований на стаціонарній апаратурі.
Шумоміри призначені для виміру рівнів звуку, що відповідають стандартним характеристикам. Частотні характеристики вимірювального тракту й шумоміра наведені в табл. 1.1.
Рекомендується використовувати характеристику А при вимірі рівня звуку й лінійну характеристику для спектрального аналізу. Допускається використання характеристики C замість лінійної. Крім того, шумомір, зазвичай, застосовується, як вхідний блок у більшості акустичних вимірювальних трактів і призначається для перетворення акустичного сигналу в електричний і посилення. По-принципу дії шумомір являє собою вольтметр із частотними характеристиками, що перемикаються, і ступінчатою регульованою чутливістю. Шумомір повинен працювати в широкому динамічному діапазоні рівнів приблизно від 20—25 до 130—140 дБ. При вимірах шумів з найнижчими рівнями використовується максимальне посилення вимірювального тракту. Щоб уникнути перевантаження підсилювача при вимірах шумів середньої інтенсивності напруга, посилена першим каскадом, послабляється атенюатором у певне число раз. При вимірах інтенсивних шумів напруга, що знімається з мікрофона або мікрофонного трансформатора, виявляється досить великою, щоб перевантажити навіть перший каскад підсилювача. Тому між мікрофоном і першим каскадом також включений атенюатор. Звичайно обидва атенюатора регулюються однією ручкою, однак є шумоміри, у яких кожен атенюатор має свою ручку (фірма «Брюель і Кьєр»). Атенюатори змінюють посилення шумоміра щаблями по 10 або 20 дБ.
 |
Таблиця 1.1
Відносні частотні характеристики вимірювальних трактів і шумомірів
| Частота, гц |
Відносна частотна характеристика, дБ |
Допуски на нерівномірність характеристики, дБ (4) |
||
| (1) |
А (2) |
C (3) |
||
| 63 |
—26,2 |
—0,8 |
±4,0 |
|
| 80 |
—22,5 |
—0,5 |
±3,5 |
|
| 100 |
—19,1 |
—0,3 |
±3,5 |
|
| 125 |
—16,1 |
—0,2 |
±3,0 |
|
| 160 |
—13,4 |
—0,1 |
±3,0 |
|
| 200 |
—10,9 |
0 |
±3,0 |
|
| 250 |
— 8,6 |
0 |
±3,0 |
|
| 315 |
—6,6 |
0 |
±3,0 |
|
| 400 |
— 4,8 |
0 |
±3,0 |
|
| 500 |
— 3,2 |
0 |
±3,0 |
|
| 630 |
— 1,9 |
0 |
±3,0 |
|
| 800 |
— 0,8 |
0 |
±2,5 |
|
| 1000 |
0 |
0 |
±2,0 |
|
| 1250 |
+ 0,6 |
0 |
±2,5 |
|
| 1600 |
+ 1,0 |
—0,1 |
±3,0 |
|
| 2000 |
+ 1,2 |
—0,2 |
±3,0 |
|
| 2500 |
+ 1,3 |
—0,3 |
+ 4,0 |
|
| 3150 |
+ 1,2 |
—0,5 |
+5,0 |
—3,5 |
| 4000 |
+ 1,0 |
—0,8 |
+ 5,5 |
—4,0 |
| 5000 |
+ 0,5 |
—1,3 |
+6,0 |
—4,5 |
| 6300 |
— 0,1 |
—2,0 |
+6,0 |
—5,0 |
| 8000 |
— 1,1 |
—3,0 |
±6,0 |
|
Для виміру рівнів звуку в тракт шумоміра між каскадами підсилювача вмикаються коригувальні ланцюги RС, зазвичай керовані спеціальним  перемикачем. Далі сигнал надходить на підсилювач. З його виходу посилена напруга подається на випрямляч стрілочного приладу й на вихідні гнізда, до яких можуть підключатися частотні аналізатори, самописці та інші прилади. Призначення випрямляча - продетектувати змінну електричну напругу для можливості виміру її магнітоелектричним стрілочним приладом. Шкала приладу градуюється в децибелах. Вимірювальний рівень звукового тиску або рівень звуку визначається алгебраїчною сумою показань атенюатора та стрілочного приладу.
перемикачем. Далі сигнал надходить на підсилювач. З його виходу посилена напруга подається на випрямляч стрілочного приладу й на вихідні гнізда, до яких можуть підключатися частотні аналізатори, самописці та інші прилади. Призначення випрямляча - продетектувати змінну електричну напругу для можливості виміру її магнітоелектричним стрілочним приладом. Шкала приладу градуюється в децибелах. Вимірювальний рівень звукового тиску або рівень звуку визначається алгебраїчною сумою показань атенюатора та стрілочного приладу.
Коефіцієнт підсилення шумоміра повинен бути постійним. Звичайно в шумомірі є пристрій для калібрування підсилення електричного тракту. Рекомендується спосіб калібрування, що включає весь тракт, починаючи з мікрофона.
1.2. Вимоги до сучасних вимірювачів шумуНа сьогоднішній день існує велика кількість приладів, що служать для вимірювання рівня шуму й проведення його спектрального аналізу. Найчастіше ці прилади являють собою складні дорогі програмно-апаратні комплекси, що відрізняються високою точністю й надійністю.
Очевидним лідером у виробництві приладів, що вимірюють рівень шуму є фірма Bruel & Kjear, прилади якої дуже відомі у світі та відрізняються великою надійністю і вартістю.У зведених таблицях можна визначити всі переваги та недоліки сучасних аналогів, які пердставлені на українському ринку. |
Таблиця 1.2
Зведена таблиця сучасних вимірювачів шуму
| SVEN |
Брюль і Кьєр |
ОКТАВА-101А (8) |
s101 (9) |
||||||
| 912 (1) |
945 (2) |
948 (3) |
949 (4) |
2221,2222 (5) |
2250 (6) |
2260 (7) |
|||
| Динамічний діапазон |
від 21 дБ до 145 дБ |
від 21 дБА до 145 дБА |
від 21 дБА до 145 дБА |
від 24 дБА до 145 дБА |
з дозволом за рівнем 0,1 дБ |
120 дБ |
80 дБ що набудовується для того, щоб одержати шкалу в діапазоні від 70 дБ до 130 дБ із кроком 10 дБ |
80 дБ |
7 діапазонів 50-126 дБ |
| Лінійний діапазон частот |
від 0,5 Гц до 90 кГц |
від 1 Гц до 20 кГц |
від 1 Гц до 20 кГц |
від 0,5 Гц до 20 кГц |
від 10 до 20 кГц |
від 3Гц до 20 кГц |
8 Гц - 20 кГц для 1/3 октавного аналізу |
1,6 Гц- 20 кГц(режим Інфразвук) 10 Гц-20 кГц(режим звук) |
|
| Розмір |
270 мм х 112 мм х 68 мм |
190 мм х 70 мм х 40 мм |
140 мм х 70 мм х 35 мм |
190 мм х 70 мм х 40 мм |
300х93х50мм |
375 мм х 120 мм х 55 мм |
62х173х40 мм |
||
| Вага |
1,8 кг із батареями |
0,4 кг із батареями |
0,4 кг із батареями |
0,4 кг із батареями |
650г разом з батареєю |
1,2 кг із батареями |
185 г |
||
|
|
свинцевий акумулятор зовнішнє живлення від мережі 220В с зарядним пристроєм |
убудовані акумулятори зарядний пристрій і зовнішнє харчування від мережі 220В |
чотири батарейки формату AA зовнішнє живлення від мережі 220В (опція) |
чотири батарейки формату AA зовнішнє живлення від мережі 220В (опція) |
Літій-іоний акамулятор від 8 до 20 безперервної роботи |
Джерела живлення ZG 0386 - Європейська версія ZG 0387 - Англійська версія ZG 0388 - Американська версія |
убудована акумуляторна батарея від мережі 220 В |
9 В типу 6LR61/6F22, |
|
| Пам'ять |
до 64 МБ енергонезалежної пам'яті |
до 32 МБ енергонезалежної пам'яті |
до 64 МБ |
до 32 МБ |
внутрішню пам'ять ємністю 20 Мбайт та карти пам'яті CF і SD |
внутрішню пам'ять ємністю 20 Мбайт |
|||
| Мікрофон |
1/2” конденсаторний мікрофон з напругою поляризації 0 В, або 200 В |
1/2” конденсаторний мікрофон з напругою поляризації 0 В або 200 В |
1/2” конденсаторний мікрофон з напругою поляризації 0 В |
1/2” конденсаторний мікрофон з напругою поляризації 0 В |
поляризованим конденсаторним мікрофоном 4176 фірми Брюль і Кєр |
Тип 4189: Попередньо поляризований мікрофон ц |
Тип 4189 преполяризований мікрофон вільного поля Номінальна чутливість: -26 дБ ±1,5 дБ на 1 В/Па Ємність: 14 пФ (при 250 Гц) |
Мікрофон конденсаторний, 1/2 дюйма, ВМК-205 |
Електротний конденсатор, двонаправлений |
| Точність |
1-го класу |
стандартів МЕК 651, т. 1, ДИН ANSI S1.4-1971 |
1-го класу точності IEC 61672-1 |
типу 1згідно IEC і ANSI |
Клас точності 1 |
±2 d при 114 d |
|||
 Живлення
Живлення
Таблиця 1.3
Зовнішній вигляд вимірювачів шуму
|
(1) |
(2) |
(3) |
(4) |




|
(6) |
|
(8) |
(9) |

 (7)
(7)

 До сучасних шумомірів в комплекті постачаєсться тажож програне забеспечення. Характеристики аналізатора можна змінити шляхом заміни пакета програмного забезпечення. Опції програмного продуктів, забезпечуючи автоматичну вибірку подій, запис даних, дозволяють розширити можливості системи. Шумомір можна підключати до персонального комп'ютера та до цифрового магнітофону для запису звуку, так само можна використовувати модем при роботі з аналізатором. Сполучення потужних апаратних засобів і програмного забезпечення перетворює аналізатор у потужний прилад, що дозволяє вирішувати всі питання, виникаючі при дослідженні звукових сигналів. Крім того вибираючи те або інше програмне забезпечення, користувач може розширити
До сучасних шумомірів в комплекті постачаєсться тажож програне забеспечення. Характеристики аналізатора можна змінити шляхом заміни пакета програмного забезпечення. Опції програмного продуктів, забезпечуючи автоматичну вибірку подій, запис даних, дозволяють розширити можливості системи. Шумомір можна підключати до персонального комп'ютера та до цифрового магнітофону для запису звуку, так само можна використовувати модем при роботі з аналізатором. Сполучення потужних апаратних засобів і програмного забезпечення перетворює аналізатор у потужний прилад, що дозволяє вирішувати всі питання, виникаючі при дослідженні звукових сигналів. Крім того вибираючи те або інше програмне забезпечення, користувач може розширити  можливості системи. Програмне забезпечення поставляється завантаженим на карти пам'яті. Можливості програного забеспечення наведенні у таблиці 1.4.
можливості системи. Програмне забезпечення поставляється завантаженим на карти пам'яті. Можливості програного забеспечення наведенні у таблиці 1.4.
Таблиця1.4
Можливості програного забеспечення
| Назва |
Зовнішній вигляд |
Функції та можливості |
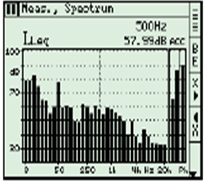
| Дисплей спектра з використанням програмного забеспечення |
|
Змінні в умовах навколишнього середовища можуть зажадати зупинці та повторному запуску вимірів для одержання необхідних результатів. Ідентифікацію або маркування подій разом з візуальним підтвердженням джерел шуму легше й більш точно проводити під час проведення вимірів, чим після вимірів. Крім того, для маркування u1089 подій, часто буває необхідним запис звуку разом із процесом вимірів. Відтворення записаного звуку в подальшому використо-вується для документування типу події. |
Розроблені три пакети програмного забезпечення: BZ7201 - пакет для октавного аналізу, BZ7202 - пакет для октавного й 1/3 октавного аналізу, BZ7206 – пакет програмного забезпечення для проведення октавного й
1/3 октавного аналізу в розширеному частотному діапазоні 8 Гц - 20 кГц.
Таблиця 1.4 (продовження)
| Маркування |
|
Кнопки маркерів дозволяють операторові ідентифікувати умови проведення вимірів. В аналізаторі передбачені чотири маркери плюс один маркер виключення. Ви можете присвоїти клавішам імена, для того щоб ідентифікувати тип події. Довжина маркера може бути змінена на екрані дисплея до однієї хвилини, після того як подія відбулася. Маркери збері-гаються , як і дані виміри, і якщо йде запис звуку, файл с расширением.wav зберігаються на ПК. Маркери можуть бути обрані в будь-якому порядку й будь-якій тривалості. Оператор може встановити всі маркери для того, щоб автоматично завершити вимір після заздалегідь певного часу або продовжу-вати вимір доти поки оператор не зупинить кожний вимір. |
| Запис звуку |
|
Для того, щоб бути впевненим у тім, що викликало відзначену подію, оператор може записувати звук на жорсткий диск комп'ютера. Оператор може управляти процесом запису звуку на жорсткий диск під час проведення виміру. Тривалість запису обмежена тільки ємністю жорсткого диска. Звук записується на один канал з опцією запису коментарів на другий канал (це може збільшити розмір файлів). Запис звуку може супрово-джуватися одним або більше маркерами. |
|
|
|
Представлений великий масив вимірюваних параметрів, що використовують різні сполучення тимчасових і частотних зважувань, фільтрів, і визначення піків і т.д. Під час проведення вимірів А-Зважені, З-зважені й L-Зважені акустичні сигнали обробляються двома 18-бітними аналого-цифровими перетворювачами й обробляються процесором реального часу. Процесор безу-пинно обчислює поточні значення для всього масиву обраних параметрів, які можуть бути негайно відображені й збережені пізніше, коли виміри завершені. |


 Екран із кривою порушення рівня
Екран із кривою порушення рівня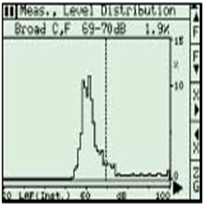
 Таблиця1.4(продовження)
Таблиця1.4(продовження)
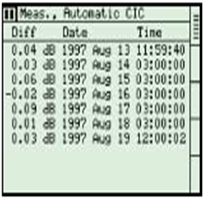
| Екран автоматичного калібрування ін'єкцією заряду |
|
Внутрішнє калібрування У цьому випадку використовується стабі-льний, внутрішній, електричний, зразковий сигнал для прямого порушення виходу преду-силителя. Весь вимірювальний ланцюг за винятком мікрофона й предусилителя буде відкалібрована. Зовнішнє калібрування Для цього необхідно підключати мікрофон до зразкового, стабільному звуковому сигналу, наприклад від калибратора звукового рівня тип 4231 або пистонфона тип 4228 або від багатофункціонального акустичного калибратора тип 4226. Цей метод дозволяє откалибровать весь ланцюг вимірів. Початкове калібрування У кожному аналізаторі зберігається інформація про початкове калібрування, серійному номері мікрофона аналізатора, що дозволяє одержати інформацію про будь-якому відхиленні від параметрів початкового калібрування. Калібрування ін'єкцією заряду дозволяє проводити моніторинг вимірювального ланцюга аж до діафрагми мікрофона. Коли ви проводите внутреннє або зовнішнє калібрування, калібрування ін'єкцією заряду так само проводиться автоматично та результат калібрування зберігається автоматично. Пізніше ви можете ініціювати CIC для того, щоб зрівняти новий результат зі зразковим. Стабільне відношення CIC дозволяє забезпечити стабільну роботу мікрофона, кабелю, предпідсилювача, що залишилася вимірювальної системи, це забезпечить одержання достовірних резуль-татів виміру. CIC може бути запущена вручну й автоматично. На Рис. показано як встановити автоматичне калібрування ін'єкцією заряду таким чином, щоб запустити та зупинити калібрування щодня протягом тижня в 03:00. Колонка відмінностей показує відхилення поточних калібрувань і зразкової зовнішнім калібруванням, що була збережена востаннє. Наприклад, всі значення CIC калібрувань відрізняються не більше ніж на 0,1 дб від зразкового значення, що говорить про стабільний стан. |
 Таблиця1.4(продовження)
Таблиця1.4(продовження)
| Спектрограми різних вимірів відображувані за допомогою програмного забезпечення |
|
Програма призначена для розрахунку й пророкування рівнів шуму навколишнього се-редовища. Розрахунки ґрунтуються на інфо-рмації про джерела шуму й описі поширення шуму від джерела до приймача, розрахунки виконуються згідно національним і міжна-родним стандартам. Акустична модель ство-рюється на основі карти місцевості й вимірів звукової потужності, проведених з допомогою програмного забезпечення інтенсивності зву-ку BZ7205 або даних про джерело звуку. За допомогою рогрммного забезпечення дані результатів вимірів можна представляти у ви-гляді граф, спектрів або у вигляді статисти-чних кривих, а так само експортувати дані ви-мірів в інші програми або направляти їх на принтер. Програма дозволяє операторові за-писувати й відтворювати звукові сигнали для наступної обробки. |
| Програмне забезпечення розраховує рейтингові рівні |
|
Ця програма має такої ж функції по відображенню результатів вимірів як і Noise Explorer. Так само ця програма призначена для розрахунку рэйтинговых рівнів (критерій оцінки шуму навколишнього середовища ґрунтується на LАeq з різними обмеженнями) відповідно до стандартів і обмеженням, яким оператор треба. Використовуючи це про-грамне забезпечення й дані вимірів, отримані за допомогою 2260, можна легко одержати значення рейтингових рівнів. Для аналізу зниження звуку, рівні шуму можуть бути відредаговані для того, щоб одержати інфо-рмацію про те, що трапиться якщо будуть виконані ті або інші заходи щодо зниження шуму. Функція запису звуку включена в програмне забезпечення. |
| Програмне забезпечення, що визначає значення рівня шуму на заводі |
|
Програмне забезпечення дозволяє легко завантажити профілі шуму в певних місцях або обмірюваних біля робочих місць, які Protector використовує для розрахунків впли-ву звуку на людей або в місцях, де прово-дяться дослідження. Програма веде розраху-нки згідно ISO 9612.2. У тих випадках, коли можливо провести виміри на робочих місцях, а робітники при цьому переміщаються, про-грама комбінує результати вимірів на робочих місцях з профілем переміщень робітників, для того, щоб одержати дози шуму, які впливають на людей. |

Порівняємо набір технічних характеристик у наведеній таблиці, зокрема частотну корерцію (принцип дії роздлядується нижче), та калібрування.
Для отримання інформації пророзподіл частот застосовується набір частотних коригувальних фільтрів, характеристики яких індексовані літерами А, В, С (Рисунок 1.2). Характеристика з індексом С мало залежить від частоти в значній частині звукових частот, у той час як характеристика з індексом А перебуває в сильній залежності від частот нижче 1000 Гц. Порівнюючи частотну характеристику А с кривими рівня рівної гучності для чистих тонів можна виявити деяку подібність між останніми й оберненою А‑ характеристикою. Навіть незважаючи на те, що процес сприйняття звуків людиною набагато складніше апроксимації за допомогою частотної корекції, як це представлено кривою А, в багатьох випадках інформація може бути отримана в результаті вимірів за допомогою апаратури за характеристикою А. Останній довід також підтверджується тим, що існуючі національні й міжнародні стандарти, що регламентуюсь вимірюванні та оцінці рівня шуму головним чином рекомендують застосування коригувальної характеристики А.
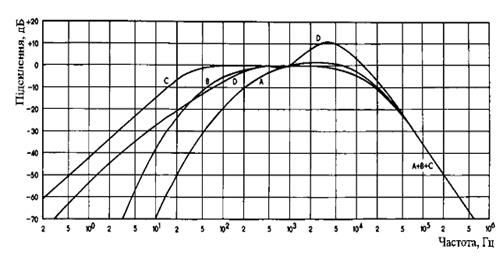
Рис. 1.2
Для того, щоб розрізняти фізичні вимірювання рівнів звукового тиску в децибелах (дБ) (без частотної корекції) від суб'єктивного виміру рівнів  гучності у фонах і вимірів, зроблених за допомогою однієї з уведених стандартних частотних характеристик А, В, С (або D), прийнята міжнародна угода про те, що результати останнього виду вимірів повинні бути виражені у вигляді рівнів звуку з використанням шкали децибел із вказівкою виду частотної коригувальної характеристики А, В, або С (або D). Якщо, наприклад, шум вимірюється з використанням корекції А, то результат повинен бути представлений у вигляді дБ(А). Аналогічно, якщо виміру шуму проводилися з використанням корекцій В та С (або D), ці результати повинні бути виражені відповідно дБ(В), дБ(С) або дБ(D).
гучності у фонах і вимірів, зроблених за допомогою однієї з уведених стандартних частотних характеристик А, В, С (або D), прийнята міжнародна угода про те, що результати останнього виду вимірів повинні бути виражені у вигляді рівнів звуку з використанням шкали децибел із вказівкою виду частотної коригувальної характеристики А, В, або С (або D). Якщо, наприклад, шум вимірюється з використанням корекції А, то результат повинен бути представлений у вигляді дБ(А). Аналогічно, якщо виміру шуму проводилися з використанням корекцій В та С (або D), ці результати повинні бути виражені відповідно дБ(В), дБ(С) або дБ(D).
Існують випадки, коли при вимірюваннях необхідна набагато більш вичерпна інформація про рівень шуму. Цю інформацію можна одержати, проводячи частотний аналіз шуму; аналіз, що часто проводиться у вигляді октавних, третинооктавних або ще більш вузьких смуг частот. З докладного частотного аналізу спектра шуму може бути отримана найбільш придатна інформація про звук, що досліджується.
2. Вибір та обґрунтування технічних рішень
2.1. Проектні рішення вимірювача шуму
Шум є важливим аспектом сучасного життєвого середовища й визначення його параметрів більше не надається лише фахівцям акустиці й вимірювальній техніці. Саме ці фактори враховані в конструкції інтегруючих прецизійних шумомірів 2221 і 2222. Прилади 2221 і 2222 постачені всіма пристроями, потрібними при вимірах і дослідженнях шуму, і їхні характеристики задовольняють вимогам запропонованої рекомендації МЕК, що визначає параметри інтегруючих прецизійних шумомірів типу IP, і стандартів МЕК 651, т. 1, ДИН-МЕК 651, кл. 1 і ANSI S1.4-1971, т. 1.
 Інтегруючі прецизійні шумоміри 2221 і 2222 автоматично визначають у чотирьох діапазонах еквівалентні рівні Lекв звукової експозиції РЗЕ й максимальні рівні звуку, тобто максимальні пікові значення зі зберіганням і максимальні середньоквадратичні значення зі зберіганням і динамічною
Інтегруючі прецизійні шумоміри 2221 і 2222 автоматично визначають у чотирьох діапазонах еквівалентні рівні Lекв звукової експозиції РЗЕ й максимальні рівні звуку, тобто максимальні пікові значення зі зберіганням і максимальні середньоквадратичні значення зі зберіганням і динамічною
Визначення еквівалентних рівнів безперервного звуку Lекв ґрунтується на принципі рівної енергії й здійснюється шляхом усереднення рівнів, що змінюються, звуку із частотною корекцією А протягом точно певного інтервалу часу. Lекв є еквівалентним рівнем безперервного звуку з фіксованою амплітудою, скоректована схемою частотної корекції А енергія якого ідентична енергії дійсного звуку або шуму з амплітудою, що змінюється в часі. Відзначимо, що при цьому враховується ідентичний опорний інтервал часу. Отже,
де ро - опорне значення звукового тиску (20 мкПа), р(t) звуковий тиск, що змінюється в часі, скоректований схемою частотної корекції А, і Т - опорний інтервал часу (інтервал часу виміру).
Визначення рівнів звукової експозиції РЗЕ. Еквівалентний рівень звукової експозиції РЗЕ є рівнем, при фіксації якого протягом тимчасового інтервалу тривалістю 1 секунду виходить скоректована схемою частотної корекції А звукова енергія, ідентична енергії дійсного короткочасного звуку або шуму, і визначається виразом:
 при цьому
при цьому ![]() =1с.
=1с.
Рівень звукової експозиції РЗЕ використовується при описі й оцінці короткочасних звуків і шумів.
Визначення максимальних середньоквадратичних значень із динамічною характеристикою «швидко» або «повільно» і зі зберіганням.
Максимальний рівень скоректованого схемою частотної корекції А звуку є максимальним середньоквадратичним значенням, певним протягом інтервалу виміру шумоміром зі стандартною динамічною характеристикою «швидко» (прилад 2221) або «повільно» (прилад 2222) і зберігаються у відповідному запам'ятовувальному пристрої. Максимальний рівень використовується при оцінці звуків і шумів з амплітудами, що змінюються.
Визначення максимальних пікових значень зі зберіганням
Максимальні пікові значення важливі саме при оцінці імпульсних звуків та їх шкідливого впливу на слух людини. Ці значення визначаються з урахуванням постійного часу наростання 30 мкс і лінійної частотної характеристики шумоміра.
Спрощену блок-схему інтегруючих презиційних шумомірів 2221 та 2222 наведено на рис. 2.1. Основні операції, що виконуються інтегруючими прецизійними шумомірами 2221 і 2222, ставляться до визначення еквівалентних рівнів Lекв на протязі інтервалів часу тривалістю до 2,77 годин. Оскільки рівні звукової експозиції (РЗЕ) та підлягаючі зберіганню максимальні рівні звуку визначаються на основі значень Lекв, нижче докладно розглядається принцип і метод виміру, обчислення та індикації еквівалентних рівнів Lекв.
Електричний сигнал, що віддається мікрофоном, підсилюється, піддається частотній корекції А й в блоках логарифмічного й анти логарифмічного перетворювачів зводиться у квадрат. Електронний інтегратор здійснює інтегрування сигналу шляхом підсумовування, видає імпульсний сигнал і  при перевищенні заданого граничного рівня автоматично вертається у вихідний стан. Частота згаданого імпульсного сигналу пропорційна квадрату миттєвого значення, що впливає на мікрофон акустичного сигналу. Отже, загальне число імпульсів пропорційно сумарній дозі, накопиченої з моменту запуску процесу виміру й обчислення. Для визначення загального числа імпульсів передбачений електронний лічильник дози. Особливості вимірювача шуму:
при перевищенні заданого граничного рівня автоматично вертається у вихідний стан. Частота згаданого імпульсного сигналу пропорційна квадрату миттєвого значення, що впливає на мікрофон акустичного сигналу. Отже, загальне число імпульсів пропорційно сумарній дозі, накопиченої з моменту запуску процесу виміру й обчислення. Для визначення загального числа імпульсів передбачений електронний лічильник дози. Особливості вимірювача шуму:
1. Атоматичне повернення та відтворення з періодом 1с в режимі визначення і зберігання максимальних значень(*)
2. Т=1с в режимі визначення РЗЕ та зберігання максимальних значень (**)
Генератор із кварцовою стабілізацією частоти генерує тактові імпульси, рахунок яких забезпечує лічильник часу. Мікропроцесор обробляє видавану згаданими вище лічильниками інформацію, обчислює значення Lекв і керує відновленням показів цифрового індикатора. Цей процес повторюється через регулярні інтервали часу тривалістю 0,5 с. Відзначимо, що лічильники дози й часу вертаються у вихідний (нульовий) стан при включенні живлення й застосуванні керуючим поверненням системи натискної кнопки.
Процес визначення рівнів звукової експозиції РЗЕ аналогічний описаному вище, що відноситься до еквівалентних рівнів Lэкв процесу. Єдине розходження полягає в тім, що при визначенні РЗЕ враховуються фіксовані інтервали часу тривалістю 1с, а не видавана лічильником часу інформація про дійсний минулий час.
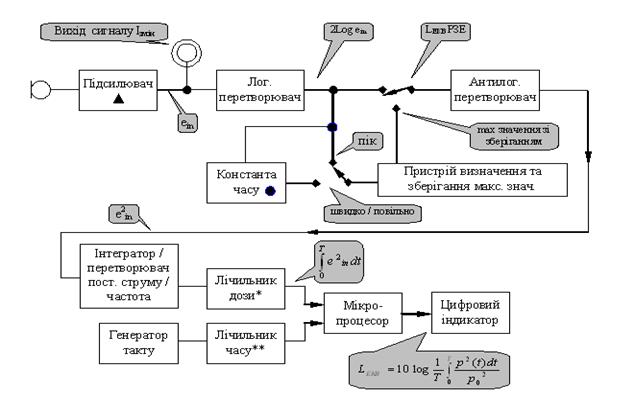
Рис. 2.1
 В режимах визначення та зберігання максимальних значень використовується спеціальний електронний пристрій. Цей пристрій визначає й зберігає максимальні значення, що підлягають подальшій обробці в процесі визначення Lекв. Еквівалентний рівень Lекв сигналу з незмінною амплітудою дорівнює миттєвому рівню останнього. Отже, результатом процесу обробки видаваної згаданим вище пристроєм інформації й обчислення Lекв є відповідне максимальне значення скоректованого схемою частотної корекції А і обробленого з обліком стандартної динамічної характеристики «швидко» чи «повільно» сигналу, або максимальне пікове значення сигналу без частотної корекції (лінійний діапазон від 20 Гц до 20 кГц).
В режимах визначення та зберігання максимальних значень використовується спеціальний електронний пристрій. Цей пристрій визначає й зберігає максимальні значення, що підлягають подальшій обробці в процесі визначення Lекв. Еквівалентний рівень Lекв сигналу з незмінною амплітудою дорівнює миттєвому рівню останнього. Отже, результатом процесу обробки видаваної згаданим вище пристроєм інформації й обчислення Lекв є відповідне максимальне значення скоректованого схемою частотної корекції А і обробленого з обліком стандартної динамічної характеристики «швидко» чи «повільно» сигналу, або максимальне пікове значення сигналу без частотної корекції (лінійний діапазон від 20 Гц до 20 кГц).
Мікрофон. Інтегруючі прецизійні шумоміри 2221 і 2222 забезпечені поляризованим конденсаторним мікрофоном 4176 фірми Брюль і Кьєр. Цей півдюймовий мікрофон відрізняється лінійною частотною характеристикою в умовах вільного звукового поля при куті падіння звукових хвиль 0° (відповідно до рекомендації МЕК). Застосування включеного в комплект при поставці дифузора DZ 9566 сприяє забезпеченню лінійної частотної характеристики мікрофона 4176 в умовах дифузійного звукового поля ( у відповідності зі стандартами АNSI).
Вхідний каскад. Змінний вхідний предпідсилювальний каскад інтегруючих прецизійних шумомірів 2221 і 2222 має високий вхідний імпеданс, при з'єднанні з високоімпедансним конденсаторним мікрофоном. Малий вихідний опір цього знімного каскаду дає можливість застосування відносно довгих сполучних кабелів.
Проблема частотної корекції, атенюатор і індикатор перевантаження.
Визначення частотної характеристики приладів 2221 і 2222, тобто вмикання та вимикання схеми частотної корекції А, відбувається автоматично відповідно до положення визначеного режиму їхньої роботи перемикача. Схема частотної корекції А використовується в режимах визначення еквівалентних їй Lекв і РЗЕ й максимальних значень із урахуванням динамічної характеристики «швидко» або «повільно». У режимі визначення та зберігання максимальних пікових значенні зчитується лінійний частотний діапазон від 10 до 20 кГц, а частотна корекція не здійснюється.
Від 25 до 145 дБ робочій динамічний діапазон підсилюючого блоку приладів 2221 і 2222 розділений на чотири піддіапазони. Спеціальний детектор перевантаження автоматично контролює амплітуду сигналів на вході й виході підсилювального блоку та при виявленні перевищення заданої межі значень сприяє включенню відповідного індикатора (▲) у лівій частині індикаторного табло. Індикатор, що сигналізує про перевантаження, залишається на індикаторному табло до віку приладу 2221 або 2222 у вихідний стан.
 Обчислення еквівалентних рівнів.
Обчислення еквівалентних рівнів.
Еквівалентні рівні Lекв обчислюються протягом обумовлених лічильником часу тимчасових інтервалів. Тривалість цих інтервалів може доходити до 2,77 год. Про перевищення цього значення та, відповідно, про неправильне значення показу цифровим індикатором еквівалентного рівня сигналізує зірочка (*) індикатор у правій частині індикаторного табло. Відзначимо, що згадані вище межа та її перевищення взагалі не впливають на відображення цифровим індикатором значення РЗЕ. Передбачена позад у корпуса приладів і 2222 перевідна таблиця дає можливість визначення значень Lекв на основі обмірюваних значень РЗЕ та дійсного минулого часу.
Обчислення та збереження максимальних значень. У відповідних до визначення й зберігання максимальних значень режимах використовується спеціальний електронний пристрій. Це пристрій визначає й зберігає максимальне значення, отримує сигнал безпосередньо від виходу логарифмічного перетворювача (у режимі визначення й зберігання максимальних пікових значень) або від з'єднаного із цим перетворювачем пристрою усереднення (у режимах визначення й зберігання максимальних середньоквадратичних значень із динамічною характеристикою «швидко» і «повільно»). Сигнал, що віддається згаданим вище електронним пристроєм подається на анти логарифмічний перетворювач, електронний інтегратор, лічильник і мікропроцесор, що здійснює потрібну обробку інформації та керуючий тим, що відбувається з періодом 1с процесом індикації та поновлення відображених цифровим індикатором максимальних значень.
Переривання. Шумоміри 2221 і 2222 можна відповідною затисненою кнопкою встановити в режим переривання циклу їхньої нормальної роботи. Переривання,що відносяться до визначення еквівалентних рівнів Lекв і РЗЕ режимів не супроводжується ні скиданням накопиченої  інформації, ні поверненням цифрового індикатора у вихідний стан, а в режимах, відповідних до визначення й зберігання максимальних значень призводить до автоматичного фіксування показання цифрового індикатора.
інформації, ні поверненням цифрового індикатора у вихідний стан, а в режимах, відповідних до визначення й зберігання максимальних значень призводить до автоматичного фіксування показання цифрового індикатора.
Повернення. Шумоміри 2221 і 2222 повертаються у вихідний стан, або автоматично при зміні положення кожного з їхніх перемикачів (не ставиться до відповідного визначення Lекв і РЗЕ положенням визначальний режим роботи перемикачів), або під ручним керуванням за допомогою відповідної натискної кнопки.
Індикатор. Індикаторне табло приладів 2221 і 2222 містить цифровий індикатор зі 3 1/2 десяткової цифри та дозволом за рівнем 0,1 дБ. Покази цифрового індикатора відновляються через регулярні інтервали часу тривалістю 0,5 с у тих, що відносяться до визначення еквівалентних рівнів Lекв і РЗЕ режимах і з періодом 1 с у режимах визначення й зберігання максимальних значень. До складу індикаторного табло також входять спеціальні індикатори, що сигналізують про режими роботи та стан приладів 2221 і 2222:
«А»: частотна корекція А
«L»: лінійна частотна характеристика
«* »: перевищення максимально припустимого значення часу при визначенні еквівалентних рівнів
«▲ »: перевищення верхньої межі робочого динамічного діапазону (перевантаження)
«▼»; догляд за нижню межу робочого динамічного діапазону
«ВАТ»: необхідність зміни елементів внутрішнього батарейного джерела живлення
«00.0»: перевірка цифрового індикатора
«- - - »: вихід за нижню межу робочого динамічного діапазону і/або затримка після повернення у вихідний стан.
 Джерело живлення
Джерело живлення
Прилади 2221 і 2222 працюють від трьох внутрішніх лужних елементів, що відповідають рекомендації МЕК 20 і забезпечують їх струмом протягом приблизно 10 год. безперервної експлуатації.
Калібрування. При перевірці й калібруванні приладів 2221 і 2222 використовуються акустичний калібратор 4230 фірми Брюль і Кьєр. Що встановлюється на мікрофон шумоміра калібратор 4230 генерує звук з точно певними рівнем (94 + 0,3 дБ) і частотою (1 кГц).
Вихід сигналу змінного струму. Сигнал змінного струму, що віддається приладами 2221 і 2222 пропорційний підсиленому та профільтрованому сигналу від їхнього мікрофону. Верхній межі діапазону вимірів відповідає напруга 2 В (СКЗ). Вихідний сигнал змінного току можна реєструвати зовнішньою апаратурою.
Даний шумомір можна підєднати у більш складну систему (Рис. 2.2, 2.3.). В даній системі шумомір буде розглядатись, як датчик. І відповідно зявляються ще деякі пристрої та відалене робоче місце оператора, який стежить за показами датчика-шумоміра. Такі системи дуже зручно застосовувать у тих випадках, коли потрібно зробити вимірювання протягом значного відрізку часу. Завдяки таким системам людина, що знімає зачення не знаходиться в шумному седеровищі.
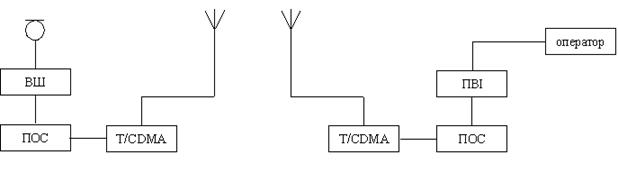
Рис. 2.2
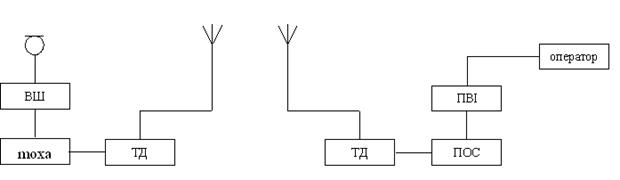
Рис. 2.3
Основні частини систем:
1. ВШ – вимірювач шуму;
2. ПОС – пристрій обробки сигналів;
3. T/CDMA – телефон CDMA-стандарту (передача сигналів по радіоканалу);
4. ПВІ – пристрій відображення інформації
5. ТД – точка доступу;
6. moxa – промисловий сервер, здатний конвертувати сигнал в такий, що передається витою парою.
В першій схемі розглянуто стільниковий зв'язок, як засіб транслювання сигналу та компютер в якості ПОС.
В другій схемі для передачі інформації використано точку доступу (ТД), відповідно, інформація обробляється, а потім конвектується за допомогою промислового сервера (moxa).
Для передачі сигналу поданим каналам можна обчислити : відносну похибку, інформаційну здатність та частотно-квантову здатність.
2.2. Розрахунок джерела напруги
Джерело напруги будується на мікросхемах MC34063 фірми Motorola. Застосування таких мікросхем дозволяє одержати необхідну напругу +5В и -5В при вхідній напрузі від 6В до 20В. Це важливо при живленні від  батарей, тому що напруга батареї може значно мінятися в міру її розряду. При живленні від зовнішнього джерела застосування подібних мікросхем вигідно тим, що не потрібно високої точності джерела напруги.
батарей, тому що напруга батареї може значно мінятися в міру її розряду. При живленні від зовнішнього джерела застосування подібних мікросхем вигідно тим, що не потрібно високої точності джерела напруги.
Типова схема підключення MCP34063 показана на рис. 2.4. (Схема підключення MCP34063 у режимі Step-Down).
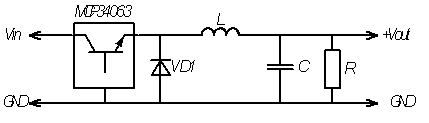
Рис. 2.4
Крім того, застосування MC34063 дозволяє досить легко одержати інверсну напругу, необхідне для живлення операційного підсилювача. Типова схема такого підключення показана на рис .2.5. (Схема включення MCP34063 у режимі Inverting)
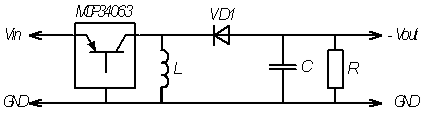
Рис. 2.5
Зробимо розрахунок параметрів схеми.
Вхідні дані: бажана вихідна напруга Vout = 5B, мінімальна вхідна напруга Vin = 7B, мінімальна частота коливань Fmin = 200 кГц.
З [17] отримуємо Vsat = 1.5 В.
Відношення часів вмикання/вимикання:
 .
.
 мкс.
мкс.
Тоді з попередніх формул час вимикання:
 мкс,
мкс,
![]() мкс.
мкс.
Значення ємності дорівнює:
![]() мкФ.
мкФ.
Значення індуктивності дорівнює:
 мкГн.
мкГн.
Аналогічні номінали елементів використовується і для схеми включення, що інвертує.
2.3. Розрахунок підсилювача.
В якості схеми підсилювача виберемо стандартну схему включення транзистора із загальним емітером (Рис. 2.6) . Роздільний конденсатор С1 служить для передачі на вхід транзистора VT1 посилюваної змінної напруги, а також виключає влучення на вхід транзистора постійної напруги. Резистори R1 і R2 утворюють дільник для отримання необхідної напруги зсуву на базі транзистора. Резистор R1 і конденсатор C2 забезпечують температурну стабілізацію роботи підсилювача. У даній схемі резистор RН є навантаженням.
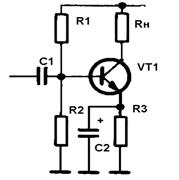
Рис. 2.6
Як транзистор VT1 виберемо широко розповсюджений КТ 315 Д з наступними параметрами:
1. максимальний струм колектора I ДО MAX = 100 м А ;
2. максимальна напруга колектор - емітер U КЭ MAX = 40 В ;
3. максимальна розсіювана потужність транзистора P МАХ = 150 м Вт ;
4. статичний коефіцієнт передачі h 21
![]() 50 .
50 .
Напруга живлення U П приймемо рівним 9 В , тоді для визначення робочого режиму виберемо дві крайні точки : (U КЭ = U П , I K = 0) і (U КЭ = 0, I K ), де U КЭ - напруга колектор - емітер , I K - максимальний струм у навантаженні:
I K
= ![]() =
= ![]() = 45 (м А).
= 45 (м А).
Для нормальної роботи транзистора виберемо робочу крапку :
I K0
= ![]() =
= ![]()
![]() 23 (м А),
23 (м А),
U КЭ0
=![]() =
= ![]() = 4.5 (В).
= 4.5 (В).
Тоді потужність, що виділяється в транзисторі :
P K0 = I K0 * U КЭ0 = 23 * 4.5 = 103.5 ( м Вт),
що не перевищує максимальну розсіювану потужність транзистора P МАХ = 150 м Вт. Потужність, споживана підсилювачем від джерела живлення :
 P 0
= I K0
* U П
= 23 * 9 = 207 ( м Вт).
P 0
= I K0
* U П
= 23 * 9 = 207 ( м Вт).
Для схеми із загальним емітером коефіцієнт підсилення по струму k i приблизно дорівнює статичному коефіцієнту передачі h 21 . Базовий струм транзистора :
I Б0
= ![]() =
= ![]() = 0.46 (м А).
= 0.46 (м А).
Тепер визначимо номінали резисторів :
R1 ![]() , R2
, R2![]() , R3
, R3 ![]() , де
, де
I Д
- струм через дільник, I Д ![]() 4* I Б0
.
4* I Б0
.
R1 ![]()
![]() 3.9 (до Ом) ,
3.9 (до Ом) ,
R2 ![]()
![]() 560 (Ом) ,
560 (Ом) ,
R3 ![]() 1 (до Ом) .
1 (до Ом) .
Коефіцієнт підсилення по напрузі визначається як : k u
= ![]() .
.
Звідси вхідний опір транзистора :
R ВХ
= ![]() =
= ![]() = 125 (Ом).
= 125 (Ом).
Ємність конденсатора С1 розраховується виходячи з того, що його опір по змінному струмові на найнижчій частоті повинен бути в багато разів менше вхідного опору :
С1 ![]() = 42.46 (мкФ).
= 42.46 (мкФ).
Вибираємо найближчий - 50 мкФ.
Для заданої смуги частот ємність конденсатора С2 повинна бути рівной десяткам мікрофарад, візьмемо 20 мкФ.
Тепер розрахуємо стабілізатор напруги з необхідними параметрами. Вхідні ланцюги блока живлення складаються з понижувального мережного трансформатора й мостового випрямляча. Схема стабілізатора напруги показана на рис. 2.7
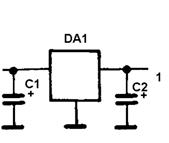
Рис.2.7
Тому що споживана схемою потужність невелика, як стабілізатор DA1 візьмемо спеціально призначену мікросхему ДО142ЕН8А, що забезпечує вихідна напруга + 9 В и струм у навантаженні до 1 А. Дана мікросхема забезпечує коефіцієнт пульсацій на виході приблизно 0.03, що задовольняє завданню. Для нормальної роботи напруга на вході мікросхеми повинна бути не менш 12 Вольтів, тому конденсатори С1 і С2 вибираємо на робочу напругу 25 В и ємністю 500 мкФ.
2.4. Можливості оператора
Для приладу вимірювання шуму потрібен оператор, людина, що буде знімати та аналізувати отриманні данні. Утворена система з людини та приладу (машини) розглядається, як загальне ціле.
Будь-яка система людина-машина (далі СЛМ) покликана задовольняти певні потреби людини або суспільства. Для цього вона повинна мати низку властивостей, які закладаються під час її проектування і реалізуються у процесі її експлуатації. Згідно з державним стандартом ДЕСТ 2.116-71, властивість СЛМ — це об'єктивна особливість, яка виявляється в процесі експлуатації. Кількісна характеристика певної властивості системи має назву показника якості СЛМ, тобто кожна СЛМ має нескінченну множину властивостей, що визначають її якість. Під якістю розуміють сукупність властивостей, які характеризують ступінь придатності системи для використання її за призначенням, тобто її ефективність.
Нині поряд з основними показниками розробки та експлуатації технічних систем (продуктивність, надійність, економічність) різко зросло значення таких показників, як ергономічність, екологічність, естетичність, котрі забезпечують досягнення соціальної ефективності нової техніки. Використання досягнень інженерної психології при проектуванні техніки й умов її функціонування сприяє підвищенню ефективності і якості праці, зручності експлуатації та обслуговування техніки, скороченню термінів її освоєння, поліпшенню умов праці, економії витрат фізичної і нервово-психічної енергії працюючої людини, підтриманню її високої працездатності. Участь людини-оператора у функціонуванні СТЛС зумовлює наявність специфічних властивостей, які визначають інтегральні характеристики зв'язку людини і машини в конкретних умовах зовнішнього середовища. Сукупність цих специфічних властивостей, котрі забезпечують можливість динамічної взаємодії людини з технічними засобами з метою виконання системою поставлених завдань у заданих умовах експлуатації, можна назвати ергономічністю системи. Ця інтегральна характеристика забезпечується певними інженерно-психологічними властивостями - системи, зокрема швидкодією, точністю, надійністю і напруженістю діяльності оператора.
Швидкодія, характеризується, часом проходження. Інформації до, замкненому колу «людина - машина», а точніше, часом функціонування СЛМ до досягнення певної мети, тобто тривалістю циклу регулювання:

 Де
Де
t — час обробки інформації в і-й ланці СЛМ;
k - кількість ланок СЛМ, в ролі яких виступають і технічні системи, і оператори.
Наприклад: t=1с, а ланок 4, тоді маємо Tu = 14
Цикл регулювання — це проміжок часу, за який виникає відхилення у системі і відбувається його ліквідування, тобто система стає такою, як задано програмою. Розглянемо цю характеристику на прикладі простої одно-контурної схеми регулювання.
Припустимо, що оператор повинен витримувати технічні параметри системи в заданих межах. Один із цих технічних параметрів, незалежно від дій оператора, почав відхилятися від заданого значення n1, до значення n0 котре розглядається як порушення в роботі системи. Інформація про це порушення з'явиться на приладах за час t1, який зумовлений інертністю системи вимірювання. Для її знаходження, сприйняття, обробки і прийняття рішення операторові необхідний певний, час tг
Крім цього, для виконання певних керуючих дій теж потрібен певний час —t3
, а для їхнього тривання в системі, з метою приведення цього параметра в норму, також необхідний певний час — t4
. Таким чином, проходження інформації по контуру управління визначається сумарним часом затримки інформації в окремих складових системи «людина — машина». Час проходження інформації; технічних частинах СЛМ (![]() і
і ![]() ) зумовлений технічними характеристиками системи. Час, необхідний на сприйняття інформації, прийняття рішень і виконання керуючих дій (
) зумовлений технічними характеристиками системи. Час, необхідний на сприйняття інформації, прийняття рішень і виконання керуючих дій (![]() і
і ![]() ), залежить від самого оператора, цілей та умов його діяльності:
), залежить від самого оператора, цілей та умов його діяльності:
![]()
Наприклад ![]() =
=![]() =0,5с, t3
=2с, t2
=2,5с
=0,5с, t3
=2с, t2
=2,5с ![]() =0,5+0,5+2+2,5=5,5с
=0,5+0,5+2+2,5=5,5с
Таким чином, оператор керує системою і регулює її ро-відповідно до певної програми, яка має часові характеристики. Виконання цієї програми залежить від технічних характеристик системи, які зумовлюють зовнішні,  технічні, часові обмеження. Крім цього, людині-оператору притаманні свої внутрішні, психофізіологічні властивості, які теж зумовлюють певні часові обмеження. При цьому ці внутрішні обмеження можуть змінюватися залежно від функціонального стану оператора. Ось чому досягнення однієї і тієї ж мети відбувається по-різному не тільки у різних операторів, але і в одного й того ж.
технічні, часові обмеження. Крім цього, людині-оператору притаманні свої внутрішні, психофізіологічні властивості, які теж зумовлюють певні часові обмеження. При цьому ці внутрішні обмеження можуть змінюватися залежно від функціонального стану оператора. Ось чому досягнення однієї і тієї ж мети відбувається по-різному не тільки у різних операторів, але і в одного й того ж.
Та в конкретних умовах діяльності певний оператор може не відчуваючи напруження, витратити мінімальний час на знаходження, сприйняття, переробку інформації і прийняття рішень (![]() ), а також на введення цього рішення у систему через керуючі дії (
), а також на введення цього рішення у систему через керуючі дії (![]() ). За таких умов час циклу регулювання буде мінімальним:
). За таких умов час циклу регулювання буде мінімальним:
![]()
Ящо витрачати на ![]() та на
та на ![]() хоча б по 5 сек, то
хоча б по 5 сек, то ![]() буде дорівнювати 11 секунд. Ця характеристика є показником внутрішніх обмежень оператора, його швидкісних можливостей, які залежать від швидкості перебігу нервових процесів.
буде дорівнювати 11 секунд. Ця характеристика є показником внутрішніх обмежень оператора, його швидкісних можливостей, які залежать від швидкості перебігу нервових процесів.
Тепер звернемо увагу на зовнішні обмеження, які необхідно враховувати в діяльності оператора. Розглянемо той самий приклад, але припустимо, що оператор, сприйнявши відхилення параметра п за час ![]() , не реагував на нього, і воно (відхилення параметра п) наростало й надалі. Характер відхилення параметра п наведений на рис. 2.4. Характер залежності циклу регулювання (
, не реагував на нього, і воно (відхилення параметра п) наростало й надалі. Характер відхилення параметра п наведений на рис. 2.4. Характер залежності циклу регулювання (![]() ) від параметра n
) від параметра n
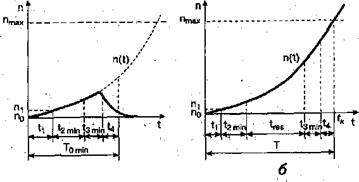
Рис. 2.8
Гранично допустиме відхилення даного параметра в системі —![]() , збільшення якого призводить до відмови системи, як бачимо з рис. 2. Останній момент, коли ще оператор може втрутитися у функціонування системи, є час
, збільшення якого призводить до відмови системи, як бачимо з рис. 2. Останній момент, коли ще оператор може втрутитися у функціонування системи, є час ![]() , за умови, що командні дії оператор введе за час
, за умови, що командні дії оператор введе за час ![]() , і вони пройдуть у системі за час
, і вони пройдуть у системі за час ![]() . Виходячи з цього, оператор у наведеному прикладі має певний вільний час понад мінімальний, який був названий резервним:
. Виходячи з цього, оператор у наведеному прикладі має певний вільний час понад мінімальний, який був названий резервним:
![]()
Слід зауважити, що поняття резервного часу введене умовно, оскільки в реальній діяльності виникають даткові затримки інформації, які збільшують час її обробки і реагування на неї. До того ж резервний час, так би мовити, вміщує або враховує індивідуальні психофізіологічні розбіжності між операторами. Для оцінки рівня технічних обмежень у часі використовують поняття ліміту і дефіциту часу. Говорячи про «ліміт», мають на увазі певні зовнішні обмеження у часі. Термін «дефіцит» уживається тоді, коли відведений оператору час менший за мінімально необхідний для вирішення задачі. Але за рахунок саморегуляції деякі оператори можуть підвищити свої швидкісні можливості і укластися у відведений час. Правда, тут постає питання: якою «ціною» це їм вдається?
 З іншого боку, критерієм швидкодії є час вирішення задачі, тобто час від моменту реагування оператора на надходження інформації до моменту закінчення керуючих дій оператора. Звичайно, цей час прямо пропорційний кількості інформації, що переробляється оператором:
З іншого боку, критерієм швидкодії є час вирішення задачі, тобто час від моменту реагування оператора на надходження інформації до моменту закінчення керуючих дій оператора. Звичайно, цей час прямо пропорційний кількості інформації, що переробляється оператором:
![]()
де а і b — константи, що мають певний фізичний зміст: а — прихований час реакції, який залежить від модальності сигналу і приблизно дорівнює 0,2с; b — величина, яка зворотна швидкості переробки інформації оператором і дорівнює 0,15/0,35 с/біт; H — кількість інформації в бітах.
У разі надходження декількох сигналів оператор приступає до обробки певного сигналу через деякий час, тобто сигнал чекає своєї обробки, на що витрачається певний час — tчек . У цьому випадку швидкодія переробки інформації оператором характеризується двома складовими:
![]()
а тривалість циклу регулювання становить:
 ,
,
Де ![]() - час затримки інформації у i-й ланці машини, а n - кількість ланок машини..
- час затримки інформації у i-й ланці машини, а n - кількість ланок машини..
При заданому Тп
і відомих ![]() (паспортні дані технічних пристроїв) від оператора вимагається така швидкодія:
(паспортні дані технічних пристроїв) від оператора вимагається така швидкодія:
З іншого боку ![]() можна визначити як суму часу кожного з етапів переробки інформації, прийняття рішень і здійснення керуючих дій — t2
і t3
.
можна визначити як суму часу кожного з етапів переробки інформації, прийняття рішень і здійснення керуючих дій — t2
і t3
.
Таким чином, часові характеристики діяльності оператора в інженерній психології можуть застосовуватись як:
показник часових обмежень;
показник швидкості перебігу нервових процесів;
характеристика процесу навчання;
характеристика узгодженості складових СЛМ.
Точність роботи оператора — це відповідність його дій заданій програмі. Програма роботи може задаватися у вигляді послідовності дій і у вигляді результату, якого потрібно досягти. Але в процесі діяльності операторові доводиться враховувати численні зміни, які доповнюють і уточнюють програму, потребують нових критеріїв оцінок. Завдяки цьому в оператора складається досить конкретна система уявлень про показники діяльності системи, яка формує певний образ-еталон, згідно з яким він організовує свою діяльність і підтримує необхідну точність у процесі реалізації прогрими.
У реальному процесі управління, хоч би як ідеально він був організований, результати дій оператора, а також показники роботи техніки неодмінно мають деякі відхилення від заданих програмних значень, які називають похибками. Поки похибка перебуває в допустимих межах, визначених правилами, інструкціями, програмами тощо, це нормальне явище, і воно принципово не впливає на функціонування системи в цілому. Коли ж похибка перевищує встановлені значення, то це вже порушує нормальну роботу системи, і її кваліфікують як помилку.
У випадках, коли похибка в роботі оператора досягає значення, за якого неможлива подальша, робота оператора або. показники .його діяльності не-можуть забезпечити досягнення поставленої мети, її кваліфікують-як ![]() відмову людини-оператора. Точність системи прийнято; характеризувати величиною, зворотною до її найбільш допустимої похибки.
відмову людини-оператора. Точність системи прийнято; характеризувати величиною, зворотною до її найбільш допустимої похибки.
Коли мова йде про систему «людина — машина» то окрема оцінка точності оператора і техніки без урахування їхнього взаємозв'язку буде неповною. Оператор під час керування системою впливає на весь комплекс її параметрів, які, своєю чергою, теж пов'язані між собою, і тому вплив на один із параметрів системи може відобразитися на точності регулювання інших. До того ж похибка в регулюванні різних систем, вимірюється різними одиницями. Ось чому загальна похибка системи має враховувати питому вагу кожної з її складових. Такий підхід дає змогу оцінювати вплив окремих систем на загальну точність її регулювання, прогнозувати процес накопичення в окремих складових системи, що сприяє розробці цілеспрямованих заходів з підвищення точності функціонування СЛМ.
Усі похибки операторів і приладів поділяють на систематичні та випадкові.
Систематичні похибки виникають у разі впливу постійно і однаково діючих факторів, які за значної кількості вимірювань багаторазово повторюються. В оператора вони з'являються через такі причини:
невиконання правил вимірювання;
невиконання правил оцінки результатів;
індивідуальні недоліки, пов'язані з професійними і особистісними якостями.
Систематичні похибки оператора можна зменшити або зовсім ліквідувати шляхом його навчання, створення спеціальних таблиць поправок або внесення певних змін у конструкцію самих приладів.
Випадкові похибки спричинені впливом факторів нестабільної дії, появу яких складно передбачити. Для операторів це, як правило, — довкілля або їх фізичний чи психічний стан. Випадкові похибки людини і техніки ліквідувати неможливо, втім, їх можна зменшити; забезпечивши належну ![]() підготовку оператора, сприятливі умови його діяльності, технічне вдосконалення приладів.
підготовку оператора, сприятливі умови його діяльності, технічне вдосконалення приладів.
Усі похибки вимірювання в оператора або технічних приладів; незалежно від природи їхнього виникнення, поділяють на абсолютні, відносні і приведені,
Абсолютна похибка — це різниця між виміряною і реальною величинами:
Δa = ах - а.
Вона виражається у тих самих одиницях, що і вимірювана величина, і не характеризує точність самого вимірювання.
Відносна похибка — це відношення абсолютної похибки до дійсного значення параметра, виражене у відсотках:
![]()
2.5. Розрахунок надійності
Надійністю називають властивість пристрою (елемента або системи) виконувати задані функції в заданих режимах і умовах застосування, технічного обслуговування, ремонтів, зберігання й транспортування протягом необхідного інтервалу часу.
Під розрахунком надійності системи розуміють визначення характеристик надійності:
λс – інтенсивність відмов системи;
Тос – середній час роботи системи (наробіток на відмову);
Рс (t) – імовірність безвідмовної роботи за час експлуатації.
Розрахуємо надійність джерела напруги. Схема представлена на рис. 2.7.
![]()
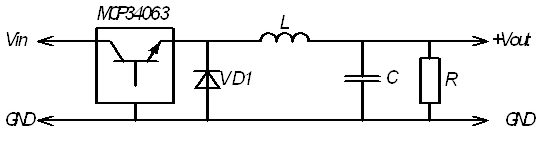
Рис. 2.9
Розрахунок проводимо в припущенні послідовності по надійності включення елементів:
Рс (t)=exp(-λс t)

де К1, К2, К3 - поправочні коефіцієнти, що враховують вплив відповідно механічного навантаження (удари й вібрація), вологості й висотності.
λ0i – номінальна інтенсивність відмов елемента;
λi – коефіцієнт режиму роботи елементів в i-й дорівнює надійній групі;
Ni – кількість елементів.
Виділимо N рівно-надійних груп
Таблиця 2.1
Надійність елементів схеми
| Тип елемента |
N |
λ0ix6 |
Kн |
αi |
λ0i*αi*N |
| резистор |
1 |
0,01 |
0,5 |
0,6 |
0,006 |
| котушка |
1 |
0,51 |
0,5 |
0,4 |
0,04 |
| конденсатор керамічний |
1 |
0,1 |
0,6 |
0,8 |
0,08 |
| діод |
1 |
0,2 |
0,4 |
0,79 |
0,158 |
|
|
1 |
0,1 |
0,5 |
1,22 |
0,122 |
| пайка для з’єднання |
18 |
0,0002 |
1 |
1 |
0,0036 |
| плата друкована |
1 |
0,1 |
1 |
1 |
0,1 |
Коефіцієнти К2, К3 дорівняємо до одиниці, К1 = 1,05, тому джерело живлення розраховане на портативний прилад (шумомір), тоді λс = 4,972 E-07
Визначимо середній час роботи системи
Тос = 1/ λс = 2010938 годин
Встановимо ймовірність безвідмовної роботи для часу t рівне 1000 годинникам.
Рс (t)=exp(-4,972 x 10-7 x1000)=0.998
У нашій схемі найменш надійний елемент це діод, тому що в нього великий коефіцієнт навантаження. Для зменшення коефіцієнта навантаження зробимо резервування постійним методом, коли й основний, і резервний елемент перебувають в однакових умовах (робітнику режимі) і одночасно виконують ті самі задані функції.
Перевіримо зміну параметра надійності при паралельному включенні двох транзисторів. Імовірність безвідмовної роботи елементів однакові й рівні Р(t) = 0.998, тоді ймовірність всієї системи
Pm1 (t) = 1 - [1 - p(t)]m = 1 – [1 – 0.998]2 = 0.999996
Ймовірність безвідмовної роботи схеми Рс (t) = 0,9986
Розрахунок надійності виконуємо з того припущення, що відмова хоча б одного елемента порушує працездатність всієї схеми.
Інтенсивність відмов схеми дорівнює сумі інтенсивностей відмов її компонентів. Інтенсивності відмови компонентів наведені в таблиці 2.2
Таблиця 2.2 – Інтенсивності відмов компонентів
| Тип елемента |
Кількість елементів, шт. |
Інтенсивність відмов 10 -6 година -1 |
| Інтегральні мікросхеми |
7 |
4 |
| Конденсатори |
17 |
0,05 |
| Резистори |
16 |
0,2 |
| Діоди |
6 |
0,25 |
| Світлодіодні індикатори |
2 |
1 |
| Кварц |
2 |
16 |
| Рознімачі |
2 |
0,062 |
| Пайки |
238 |
0,01 |
Сумарна інтенсивність відмов:
![]()
![]() год-1
.
год-1
.
Тоді з напрацювання на відмову
 год.
год.
3. Помилки вимірювання шумових характеристик
3.1. Класифікація вимірів по точності
Джерела похибок при вимірі шуму машин досить різноманітні. Похибки можуть перевищувати десятки децибел. Визначення похибок дозволяє їх частково усунути й частково зменшити, наблизивши до припустимої ![]() величини. Важливою умовою при визначенні похибок є досягнення повторюваності результатів. Відсутність повторюваності свідчить про несправність апаратури, нестабільності роботи джерела та відсутності навичок у оператора. Перевагу віддають даним, отриманим за допомогою більш точних приладів, але й тут необхідні критерії точності. Так ми приходимо до поділу вимірів по точності на класи. Розрізняють три класи: I, II і III. Виміру по I класі проводяться в добре оснащених базових лабораторіях, по II класі - у лабораторіях промислових підприємств і по III класі - у цехах, де важко створити звукове поле. Наближені методи розрахунку шумових характеристик також дають результати, що відповідають III класу.
величини. Важливою умовою при визначенні похибок є досягнення повторюваності результатів. Відсутність повторюваності свідчить про несправність апаратури, нестабільності роботи джерела та відсутності навичок у оператора. Перевагу віддають даним, отриманим за допомогою більш точних приладів, але й тут необхідні критерії точності. Так ми приходимо до поділу вимірів по точності на класи. Розрізняють три класи: I, II і III. Виміру по I класі проводяться в добре оснащених базових лабораторіях, по II класі - у лабораторіях промислових підприємств і по III класі - у цехах, де важко створити звукове поле. Наближені методи розрахунку шумових характеристик також дають результати, що відповідають III класу.
I клас точності вимірів вимагає наявності прецизійних приладів, високоякісних заглушених або ревербераційних камер необхідних розмірів, низького рівня перешкод і суворого дотримання методів вимірів. Допускається внесення поправок у показники приладів по даним їх градуювання.
II клас точності вимірів допускає застосування приладів нормальної точності. Якість звукового поля може бути дещо гірше, ніж потрібно для I класу. Застосовують методи вимірювання у вільному й відбитому полях, а також методи з використанням зразкового джерела. Допускається внесення поправок, що враховують перешкоди.
III клас точності вимірів також вимагає застосування приладів нормальної точності, але допускає знижену точність їх градуювання, а також застосування приладів застарілих типів. Допускаються відхилення від встановлених методів виміру та виміри при підвищеному рівні перешкод. Виконання або невиконання всіх умов для певного методу вимірів у багатьох випадках може бути основою для віднесення вимірів до того або іншого класу.
Випадкові похибки вимірів.
![]() Найбільш достовірним прийнято вважати середнє значення вимірюваної величини, рівня звукового тиску або рівня звуку (А). Середнє значення утворюється як при усередненні декількох результатів в одній точці на вимірювальній поверхні
Найбільш достовірним прийнято вважати середнє значення вимірюваної величини, рівня звукового тиску або рівня звуку (А). Середнє значення утворюється як при усередненні декількох результатів в одній точці на вимірювальній поверхні ![]() , так і при усередненні декількох результатів для різних точок
, так і при усередненні декількох результатів для різних точок ![]() .
.
Похибку окремого виміру найбільш часто характеризують середньоквадратичними значеннями ![]() ,
, ![]() отриманими на підставі ряду вимірів. Два окремих виміри, зроблених у різних лабораторіях з однаковою погрішністю
отриманими на підставі ряду вимірів. Два окремих виміри, зроблених у різних лабораторіях з однаковою погрішністю ![]() можуть у виняткових випадках розрізнятися між собою на 3
можуть у виняткових випадках розрізнятися між собою на 3 ![]() . Більше розходження малоймовірне.
. Більше розходження малоймовірне.
Якщо зроблено m вимірів і обчислене середнє значення ![]() , то його похибку характеризують величиною середньоквадратичної похибки результату Sm
=
, то його похибку характеризують величиною середньоквадратичної похибки результату Sm
=![]() /
/![]() . Величина Sm
може бути зроблена досить малої шляхом збільшення числа вимірів m. Аналогічно при усередненні значень для різних точок на вимірювальній поверхні довірчий інтервал, що характеризує розкид середнього значення, звужується при збільшенні числа точок, і похибка вимірів зменшується.
. Величина Sm
може бути зроблена досить малої шляхом збільшення числа вимірів m. Аналогічно при усередненні значень для різних точок на вимірювальній поверхні довірчий інтервал, що характеризує розкид середнього значення, звужується при збільшенні числа точок, і похибка вимірів зменшується.
![]() Іноді похибку характеризують середньою, імовірною й граничною погрішностями, що піддаються простому перерахуванню, якщо встановлено, що закон розподілу похибок нормальний.
Іноді похибку характеризують середньою, імовірною й граничною погрішностями, що піддаються простому перерахуванню, якщо встановлено, що закон розподілу похибок нормальний.
Нормальність закону розподілу величини може порушуватися під впливом регулярно, впливаючого фактору. Так, наприклад, випромінювання звуку зі спрямованим джерелом у ревербераційній камері викликає порушення випадкового характеру розподілу щільності звукової енергії в камері, і область від відображеного поля з випадковим розподілом віддаляється від джерела.
Слід зазначити, що величина σ, називана також стандартним відхиленням, має сенс при будь-якому законі розподілу величини.
Систематичні похибки вимірів.
Систематичними називають похибки, пов'язані з відхиленням характеристик приладів, звукового поля та величин, що входять у розрахунок, від заданих значень.
Систематичні похибки можуть бути постійними за знаком у всьому діапазоні вимірів або змінними за знаком ( + ) або (-) і містити постійну та змінну складові.
Окремі складові систематичної похибки виявляють градуюванням апаратури, заміною деяких приладів у вимірювальному тракті приладами інших типів або порівнянням результатів вимірів, отриманих незалежними методами. Систематичні похибки нерідко зустрічаються також при невідповідності методів вимірів і градуюванні приладу.
Розрізняють наступні систематичні похибки: основні, додаткові й не виключені систематичні залишки.
3.2. Помилки, пов’язані з частотною характеристикою чутливості вимірювача шуму.
Частотна похибка чутливості шумоміру складається з постійної для всіх частот складової, пов'язаної з підсиленням, і зі змінною складової, що повинна вкладатися в допуски на відхилення частотної характеристики чутливості від номінального значення. Постійна складова може бути визначена та потім виключена в результаті градуюванні шумоміра та визначення середнього для всіх частот значення рівня чутливості. Із цією метою діапазон частот розбивають на n рівних, відносних інтервалів і складають рівні чутливості в цих інтервалах за правилом додавання рівнів. Від отриманої суми віднімають 10lg і одержують середній рівень чутливості відносно ![]() н/м2
. Різниця між рівнем, відзначеним у паспорті калібратору шумоміра й середнім рівнем, обчисленим для відповідного положення дільника, є постійним виправленням, що додають
н/м2
. Різниця між рівнем, відзначеним у паспорті калібратору шумоміра й середнім рівнем, обчисленим для відповідного положення дільника, є постійним виправленням, що додають ![]() до показання шумоміра. Це виправлення може бути врахована зміною настановного рівня в калібраторі. Якщо змінна складова, що залишилася, систематичної похибки чутливості не виходить із поля допуску на нерівномірність характеристики, то можна чекати, що похибку шумоміра при вимірі шуму із широким спектром не перевищить величини максимального відхилення поля допуску від номіналу в середній частині частотного діапазону, тобто ±3 дБ для шумоміра нормальної точності й ± 1 дБ для прецизійного шумоміра.
до показання шумоміра. Це виправлення може бути врахована зміною настановного рівня в калібраторі. Якщо змінна складова, що залишилася, систематичної похибки чутливості не виходить із поля допуску на нерівномірність характеристики, то можна чекати, що похибку шумоміра при вимірі шуму із широким спектром не перевищить величини максимального відхилення поля допуску від номіналу в середній частині частотного діапазону, тобто ±3 дБ для шумоміра нормальної точності й ± 1 дБ для прецизійного шумоміра.
Цими значеннями й визначається в основному частотна похибка шумоміра, що пройшов перевірку. Частотні виправлення до показань шумоміра, що пройшов градуювання (тобто визначення частотної характеристики чутливості), можуть бути використані для обчислення виправлення при вимірі шуму з певним відомим спектром (табл. 3.1.). Виправлення виявляються рівними енергетичній різниці між сумарним рівнем звукового тиску шуму, обчисленим по спектрі, і сумарним рівнем звукового тиску шуму, обчисленим по спектрі, відкоректованому по таблиці поправок до показань шумоміра. Похибку градуюванні шумоміра ![]() 0,5 дБ.
0,5 дБ.
Таблиця 3.1
Частотні виправлення до показань шумоміра
| Номер октавної смуги |
Середня частота октавної смуги, Гц |
Відносний рівень спектра в смузі, дБ |
Середнє виправлення до показання шумоміра в межах октавної смуги, дБ |
Корегований рівень спектра, дБ |
| 1 |
63 |
50 |
+8 |
58 |
| 2 |
125 |
50 |
+4 |
54 |
| 3 |
250 |
53 |
+ 2 |
55 |
| 4 |
500 |
56 |
+ 1 |
57 |
|
|
1000 |
59 |
—1 |
58 |
| 6 |
2000 |
62 |
+2 |
64 |
| 7 |
4000 |
40 |
+4 |
44 |
| 8 |
8000 |
35 |
+6 |
41 |
| Сумарний рівень |
65 |
— |
68 |
|
Виправлення Δ=68—65=3 дБ. Аналогічно може бути обчислене виправлення для випадку «білого» шуму, у якого спектральний рівень підвищується із частотою на 3 дБ на кожну октаву, а також «рожевого» шуму, з постійним спектральним рівнем в октавних смугах.
3.3. Помилки, пов'язані з чутливістю селективного вимірювального тракту
Селективний вимірювальний тракт може бути представлений у вигляді шумоміра з фільтрами; шумоміра та електричного аналізатора; вимірювальні мікрофони, мікрофонного підсилювача; електричного аналізатора й індикаторного приладу та ін. При градуюванні селективного тракту визначають виправлення до його показань у кожній частотній смузі звіренням тракту (включаючи мікрофон) зі зразковим вимірювальним трактом на білому шумі.
Якщо величина цих поправок не виходить із поля допуску, необхідного нормативними документами й гарантованого виробником, то на вимірювальний тракт видається свідоцтво про державну перевірку. У цьому випадку вимірювальний тракт використовується без внесення поправок на його чутливість.
Якщо величина поправок виходить за поля допуску, то для обліку систематичної похибки вносять виправлення для кожного смугового фільтра. Виправлення придатні для діапазону рівнів, при яких відхилення ![]() амплітудної характеристики тракту (залежності показань індикатора від величини на вході тракту) від лінійної не перевищує 1—2 дБ. Ця величина також контролюється при державній перевірці.
амплітудної характеристики тракту (залежності показань індикатора від величини на вході тракту) від лінійної не перевищує 1—2 дБ. Ця величина також контролюється при державній перевірці.
В експлуатаційних умовах можуть бути проконтрольовані характеристики як наскрізного тракту (включаючи мікрофон) звіренням на чистих тонах з показаннями зразкового мікрофона, так і окремих елементів тракту: атенюатора, підсилювача, фільтрів, індикаторного приладу шляхом подачі на електричний вхід тракту сигналу постійного рівня від генератора синусоїдальної напруги, що має досить точний дільник. Індикаторний прилад тракту контролюють при цьому, звіряючи його на чистих тонах зі зразковим вольтметром. Якщо при держперевірці вимірювального тракту виправлення до показань дільника та шкали виявляться вище норми, то, у вигляді виключення, на них дають таблиці поправок, внесених у показання приладу при вимірі шуму. Похибку визначення поправок на чутливість σ=1 дБ. Для градуювання селективних трактів по чутливості можуть бути використані також чисті тони, однак обчислити виправлення при цьому для широкосмугового шуму важко.
3.4. Помилки, пов’язані з направленістю мікрофона
Описані систематичні похибки відносяться до випадку застосування приладів у вільному полі та орієнтації мікрофона в напрямку до джерела звуку.
Виміри у відбитому полі вимагають визначення рівня чутливості приладу у відбитому полі Е2. Ця величина може бути визначена градуюванням мікрофона (шумоміра) у ревербераційній камері по методу звірення зі зразковим ненаправленим мікрофоном або вирахуванням (у децибелах) від відомого рівня чутливості у вільному полі Е1 індексу спрямованості мікрофона
Е2 = Е1 -(ІС).
Для селективних трактів можна врахувати відповідні виправлення для кожної середньої частоти фільтра, а для шумоміра — лише електричною корекцією частотної характеристики чутливості по частотній характеристиці індексу спрямованості мікрофона, застосованого в шумомірі.
![]() Припустимі відхилення характеристики спрямованості вимірювального мікрофона від кругової в діапазоні кутів ±90° для шумоміра нормальної точності наведені в табл. 3.2
Припустимі відхилення характеристики спрямованості вимірювального мікрофона від кругової в діапазоні кутів ±90° для шумоміра нормальної точності наведені в табл. 3.2
При вимірі в проміжній області між вільним і відбитим.
Таблиця 3.2
Припустимі відхилення характеристики спрямованості вимірювального мікрофона від кругової в діапазоні кутів ±90° для шумоміра нормальної точності.
| Частотний діапазон, гц |
Відхилення, дБ |
|
| Мікрофон на корпусі шумоміра |
Мікрофон на подовжувальному шланги |
|
| Менш 500 |
±1,0 |
±1,0 |
|
|
±1.5 |
+ 1; —2,0 |
| До 2000 |
±4,0 |
+ 1; —6,0 |
| До 4000 |
±8,0 |
+ 1; —8,0 |
| До 8000 |
±15,0 |
+ 1; —15,0 |
3.5. Помилки, пов’язані з характеристикою детектора
У шумовимірюючій апаратурі рекомендується застосовувати квадратичний детектор, який допускає енергетичне додавання обмірюваних рівнів. Лінійне детектування у випадку нормального розподілу миттєвих значень сигналу дає похибку порядку 1 дБ у порівнянні з квадратичною. Піковий детектор дає показання при вимірі шуму, на декілька децибел, що відрізняються від показань квадратичного детектора, якщо вони однаково відградуюванні на чистому тоні.
Цим пояснюється, що сума спектральних рівнів, обчислена по записі спектра на деяких самописцях, відрізняється від сумарного рівня.
У шумомірах, допущених до застосування, характеристика детектора задовольняє необхідним вимогам. Це не ставиться до деяких типів самописів рівня (Н-110, 2304 і ін.), що мають детектор, близький до пікового. Отже, показання їх істотно залежать від пікфактора сигналу. Похибки цих самописців при абсолютних вимірах дозволяють вважати результати вимірів орієнтовними. Самописці з квазипіковим детектором можуть використовуватися для відносних вимірів при контролі продукції, але не для точного визначення шумових характеристик рівня звукової потужності й рівня звуку (А).
3.6. Помилки, пов’язані зі звуковим полем
Вільне звукове поле контролюють за допомогою допоміжного джерела (гучномовця) або, що менш бажано, за допомогою випробуваної машини. ![]() Систематична похибку, зв'язана зі звуковим полем, у цьому випадку дорівнює різниці між рівнем сумарного звуку (прямий звук плюс відбитий звук) і рівнем прямого звуку в точці прийому. Виділити прямий звук із сумарного можна графічно шляхом побудови за даними вимірів кривої спаду рівня звукового тиску зі збільшенням відстані від джерела (рівень звукового тиску залежно від логарифма відстані). Різниця в децибелах між експериментальною кривою спаду та прямою з нахилом 6 дБ на відрізок, що відповідає подвоєнню відстані, представляє відхилення поля від «закону оберненої пропорційності», тобто систематичну похибку. Сполучити обидві криві можна в точці, що задовольняє цьому закону, наприклад, на відстані від випромінювача, рівній його подвоєному діаметру. Для наближеного контролю поля стандарт рекомендує не знімати всю криву спаду рівня, а визначати різницю рівнів у точці на половинній відстані від машини й у вимірювальній точці. Різниця повинна бути не менш 5 дБ. Можна також визначати різницю рівнів у вимірювальній точці і на подвоєній відстані. У цьому випадку різниця повинна бути не менш 4 дБ. Різні значення допуску пов'язані зі збільшенням впливу відбитого поля на подвоєній відстані. Систематична похибку, пов'язана з відхиленням від вільного поля, допускається рівною 1,5—2 дБ для I і II класів. Стандарт допускає виміру за методикою вільного поля і при трохи більшій систематичній похибці. Це повинно бути зазначено в протоколі вимірів, і виміри в цьому випадку відносять до III класу.
Систематична похибку, зв'язана зі звуковим полем, у цьому випадку дорівнює різниці між рівнем сумарного звуку (прямий звук плюс відбитий звук) і рівнем прямого звуку в точці прийому. Виділити прямий звук із сумарного можна графічно шляхом побудови за даними вимірів кривої спаду рівня звукового тиску зі збільшенням відстані від джерела (рівень звукового тиску залежно від логарифма відстані). Різниця в децибелах між експериментальною кривою спаду та прямою з нахилом 6 дБ на відрізок, що відповідає подвоєнню відстані, представляє відхилення поля від «закону оберненої пропорційності», тобто систематичну похибку. Сполучити обидві криві можна в точці, що задовольняє цьому закону, наприклад, на відстані від випромінювача, рівній його подвоєному діаметру. Для наближеного контролю поля стандарт рекомендує не знімати всю криву спаду рівня, а визначати різницю рівнів у точці на половинній відстані від машини й у вимірювальній точці. Різниця повинна бути не менш 5 дБ. Можна також визначати різницю рівнів у вимірювальній точці і на подвоєній відстані. У цьому випадку різниця повинна бути не менш 4 дБ. Різні значення допуску пов'язані зі збільшенням впливу відбитого поля на подвоєній відстані. Систематична похибку, пов'язана з відхиленням від вільного поля, допускається рівною 1,5—2 дБ для I і II класів. Стандарт допускає виміру за методикою вільного поля і при трохи більшій систематичній похибці. Це повинно бути зазначено в протоколі вимірів, і виміри в цьому випадку відносять до III класу.
Виходячи із заданої похибки поля в точці вимірювання, розрахуємо припустимі значення різниці рівнів при контролі вільного поля за методами подвоєння вимірювальної відстані й ділення цієї відстані навпіл.
Відкладемо по осі абсцис (Рис. 3.1. Визначення впливу відбитого
звуку на похибку вимірів у вільному звуковому полі.) відносні відстані до крапкового джерела r/r0 у логарифмічному масштабі та виберемо вимірювальну точку на відстані r/r0 = 1.
![]() По осі ординат відкладемо перевищення рівня в порівнянні із рівнем на вимірювальній відстані, прийнятій за 0.
По осі ординат відкладемо перевищення рівня в порівнянні із рівнем на вимірювальній відстані, прийнятій за 0.
Визначимо різницю рівнів у крапках b1 і b2 якщо пряма а1 а2 відповідає закону оберненої пропорційності між звуковим тиском v відстанню до випромінювача, а відрізок Δ=а1 b1 =1 дБ представляє припустиму похибку поля в точці виміру.
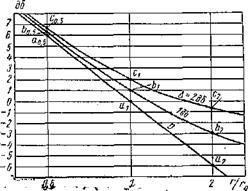 Рис. 3.1
Рис. 3.1
Рівень відбитого звуку Lвід для кривій (b0,5 , b1 , b2 ), визначимо як енергетичну різницю між рівнем у точках b1 і а1. Тому що рівні в цих точках розрізняються на 1 дБ, енергетична різниця рівнів буде на 5,8 дБ менше, ніж рівень у точці а1 , тобто у всіх точках приміщення
Lвід =La 1 — 5,8 дБ.
Прийнявши для визначеності, наприклад, La1
=70 дБ, одержуємо Lвід
=64,2 дБ. Рівень у точці b2
дорівнює енергетичній сумі рівнів у точці аз прямого звуку й рівня Lвід
, обчисленого раніше. Тому що рівень у точці а2
на 6 дБ менше, ніж у точці а1
, то його величина дорівнює La2
=70—6 =64 дБ. Енергетична сума La2
і Lотр
буде дорівнюєвати відповідно до номограми, ![]() 66,9 дБ. Інакше кажучи, рівень у точці b2
(Lb2
) виявляється рівним 66,9 дБ, а рівень у точці b1
(Lb1
) — рівним 70 + 1 = 71 дБ.
66,9 дБ. Інакше кажучи, рівень у точці b2
(Lb2
) виявляється рівним 66,9 дБ, а рівень у точці b1
(Lb1
) — рівним 70 + 1 = 71 дБ.
При контролі поля визначають арифметичну різницю рівнів у точках b1 і b2 , що у нашім випадку виявляється рівної 71—66,9=4,1 дБ. Аналогічно, для випадку контролю поля за методом ділення вимірювальної відстані навпіл отримаємо арифметичну різницю рівнів у точках b0,5 і b1 , рівну 5,3 дБ.
Результати 4,1 і 5,3 дБ справедливі при будь-яких значеннях рівня Lаl при заданій похибки в точці а1 , рівної 1 дБ, тобто в певному заглушеному приміщенні. Отже, якщо допустити в точці виміру похибку поля, рівну 1 дБ, тобто при контролі поля за методом подвоєння відстані варто допустити різницю рівнів не менш 4,1 дБ, а при контролі за методом ділення вимірювальної відстані навпіл — не менш 5,3 дБ
Для припустимої похибки Δ=1,5 дБ отримаємо відповідно 3,3 і 5,0 дБ. Для припустимої похибки Δ= 2 дБ — відповідно 2,8 і 4,5 дБ. Можуть бути обчислені також мінімально припустимі різниці рівнів для проміжних точок кривої спаду рівнів звукового тиску.
У табл. 3.3. наведені значення мінімально припустимої різниці для Δ= 1,5 дБ.
Таблиця 3.3
Мінімально припустимі різниці рівнів при контролі вільного поля ΔL у децибелах на вимірювальній відстані r/r0 =1 і на допоміжній вимірювальній поверхні на відстані r/r0
| r/r0 |
ΔL ,дБ |
r/r0 |
ΔL, дБ |
r/r0 |
ΔL , дБ |
r/r0 |
ΔL , дБ |
| 0,50 |
5,0 |
0,58 |
3,8 |
0,66 |
2,8 |
1,90 |
3,1 |
| 0,51 |
4,8 |
0,59 |
3,7 |
0,67 |
2,7 |
1,95 |
3,2 |
| 0,52 |
4,6 |
0,60 |
3,5 |
1,60 |
2,5 |
2,00 |
3,3 |
| 0,53 |
4,5 |
0,61 |
3,4 |
1,65 |
2,6 |
2,10 |
3,4 |
| 0,54 |
4,3 |
0,62 |
3,3 |
1,70 |
2,7 |
2,20 |
3,6 |
|
|
4,2 |
0,63 |
3,2 |
1,75 |
2,8 |
2,30 |
3,7 |
| 0,56 |
4,l |
0,64 |
3,1 |
1,80 |
2,9 |
2,40 |
3,8 |
| 0,57 |
3,9 |
0,65 |
2,9 |
1,85 |
3,0 |
2,50 |
3,9 |
Відбите поле також контролюють за допомогою допоміжного джерела. При цьому визначають мінімальну відстань від джерела, починаючи з якого на даній частоті можна зневажити прямим випромінюванням і вибрати вимірювальні точки. Систематичною погрішністю виміру (у цьому випадку) буде різниця між сумарним рівнем звукового тиску (прямий звук і звук відбиття) і відбитим рівнем звукового тиску. Величина цієї похибки звичайно не перевищує 1 — 2 дБ на відстанях, рівних або більших, ніж три граничних радіуси.
Якщо при вимірюванні рівня звукової потужності у відбитому полі прагнуть досягти похибку вимірів менше, ніж 2 дБ, то до результату обчислення рівня звукової потужності додають виправлення в децибелах, що враховує збільшення щільності звукової енергії біля стінок приміщення (чисельник) і зростання звукового тиску поблизу джерела (знаменник) у порівнянні з тиском у точці вимірювання:
Δ=10*lg[(1+Sv λ /8*V)/(1-α)],
де Sv - площа поверхонь, що обгороджують, приміщення, м2 ;
V — об'єм приміщення, м3 ;
λ, — довжина хвилі, м;
![]() середній коефіцієнт поглинання;
середній коефіцієнт поглинання;
А — еквівалентна площа звукопоглинання, м2 .
Відповідна систематична похибку зростає в області низьких частот пропорційно збільшенню чисельника і в області високих частот пропорційно зменшенню знаменника. Систематичні похибки, пов'язані з полем, при вимірі за методом зразкового джерела шуму не грають істотної ролі. Вони можуть впливати на результати, якщо випробувана машина має значну спрямованість випромінювання, що відрізняється від спрямованості зразкового джерела шуму.
При вимірі в ближньому полі, на відстані 1 м від зовнішнього контуру машин з lmах >0,75 м, похибки, пов'язані з полем інтерференції, не піддаються точному обліку. Звукове поле в приміщенні при цьому контролюють, як прийнято для випадку вільного поля.
3.7. Помилки, пов’язані з акустичними завадами
Розрізняють постійні і коливні в часі систематичні похибки, пов'язані з акустичними перешкодами.
У першому випадку відповідне виправлення до результату виміру ΔL обчислюють за правилом вирахування рівнів, причому від сумарного рівня Lcyм (рівень сигналу плюс рівень перешкод) віднімають рівень перешкод Lпер , вимірювальний при виключеному випробуваному джерелі шуму. Різниця Lcyм - Lпер , від 9 до 6 дБ відповідає ΔL=1 дБ, різниця від 5 до 4 дБ відповідає ΔL = 2 дБ.
Систематичні похибки через передачу структурного звуку важко піддаються обліку, і стандарти рекомендують зменшувати їх за допомогою належного фундаменту й амортизаторів.
Приклад. Обчислити випадкову похибку вимірів. Результати вимірів в одній точці вільного поля на вимірювальній поверхні Lk і у вісьмох точках Lі, наведені в таблиці 3.4 та 3.5.
Таблиця 3.4
Виміри вільного поля на вимірювальній поверхні Lk
|
|
|
| 80 |
16 |
|
|
0 |
| 83 |
1 |
| 85 |
1 |
| 84 |
0 |
| 87 |
9 |
| 85 |
1 |
| 82 |
4 |
| 86 |
4 |
| 83 |
1 |
Для однієї точки на вимірювальній поверхні вимірів:
![]()
![]() ;
;
 дБ;
дБ;
![]() дБ.
дБ.
Для восьми точок на вимірюваній поверхні наведені у таблиці 3.5.
Таблиця 3.5
Виміри вільного поля на вимірювальній поверхні у вісьмох точках Lі
|
|
|
| 84 |
9 |
| 88 |
1 |
| 87 |
0 |
| 86 |
1 |
| 87 |
0 |
| 86 |
1 |
|
|
10 |
| 85 |
4 |
![]() дБ
дБ
![]() дБ
дБ
![]() дБ
дБ
Для степені надійності ά=0,7 і числа степені свободи b = 8-1=7, t =1,12
![]() дБ
дБ
Середнє значення виміряного рівня лежить у довірчому інтервалі
![]()
![]()
3.8. Помилки, пов’язані з акустичними завадами
Для зменшення похибок проводять наступні організаційні й технічні заходи.
Стандартизація методів виміру шуму окремих видів машин.
На підставі старих стандартів розробляють стандарти, що враховують специфічні особливості випромінювання шуму різними видами й групами машин, у яких вказують режим роботи машини, уточнюють положення мікрофона й вибирають метод виміру з рекомендованих в основному стандарті, пропонують виміри по сферичній або напівсферичній вимірювальній поверхні, встановлюють необхідність виміру показника спрямованості та ін. Подібні уточнення ведуть до більшої однаковості проведення вимірів для певного виду машин і до зменшення систематичних і випадкових похибок.
Стандартизація шумовимірюваної апаратури.
У нашій країні ще не розроблені стандарти на шумоміри фільтри, вимірювальні мікрофони, хоча рекомендації із шумомірів нормальної точності й прецизійним, а також рекомендації з фільтрів Міжнародної електротехнічної комісії (МЕК) є.
Відсутність стандартів на прилади гальмує їхнє серійне виробництво і зняття з виробництва застарілих зразків. Це заважає також держперевірці приладів.
Досвід спеціалізованих фірм по виробництву акустичної вимірювальної апаратури показує, що цінність апаратури значно зростає при її комплектності, централізованій розробці комплексу приладів, пристосованих до роботи в різних сполученнях. Розробка окремих приладів різними організаціями шкодить справі єдності вимірів у країні, тому що ці прилади часто виявляються неузгодженими між собою, що веде до систематичних похибок вимірів.
Підготовка фахівців.
![]() Похибки вимірів істотно залежать від ступеня підготовки технічного персоналу, що проводить вимірювання. Але у вищому й середньому навчальному закладах ще недостатньо кафедр, що готують метрологів і акустиків. Тому найближчим часом планується організація семінарів, курсів, а також постійна консультація з питань вимірювання шуму машин на ВДНГ. Навчання включає знайомство з основами метрології, ипромінювання й поширення звуку, з обробкою результатів вимірів, пристроєм і характеристиками вимірювальної апаратури.
Похибки вимірів істотно залежать від ступеня підготовки технічного персоналу, що проводить вимірювання. Але у вищому й середньому навчальному закладах ще недостатньо кафедр, що готують метрологів і акустиків. Тому найближчим часом планується організація семінарів, курсів, а також постійна консультація з питань вимірювання шуму машин на ВДНГ. Навчання включає знайомство з основами метрології, ипромінювання й поширення звуку, з обробкою результатів вимірів, пристроєм і характеристиками вимірювальної апаратури.
![]() 4
.
Економічна частина
4
.
Економічна частина
4 .1 . Аналіз ринку
ОГЛЯД ТА АНАЛІЗ СУЧАСНИХ АНАЛОГІВ ОБ'ЄКТА ПРОЕКТУВАННЯ
В цьому розділі буде проведений огляд та порівняльна оцінка важливих параметрів деяких шумомірів вітчизняного та зарубіжного виробництва, які представлені на Українському ринку. Будуть виявлені недоліки та переваги у кожного з них.
Порівняльна оцінка буде проведена по таким головним критеріям:
- Клас точності.
- Стандарти.
- Лінійний діапазон частот.
- Частотний аналіз в реальному часі.
- Апаратні засоби та програмне забезпечення.
- Збереження даних.
Огляд підсилювачів зарубіжного виробництва

Рис. 4.1
На рисунку 1.1 представлено SVAN-912M – цифровий, 1-го класу точності аналізатор звуку й вібрації, призначений для акустичних вимірів, моніто-рингу шуму навколишнього середовища, оцінки впливу шуму й вібрації на здоров'я людини, контролю технічного стану машин. Використовуючи два цифрових процесори, SVAN-912M вимірює інфразвук, ультразвук, здійснює 1/1 і 1/3 октавний аналіз (включаючи статистичний аналіз у цих смугах), а також обчислює в реальному масштабі часу вузькосмуговий спектр. Всі ці виміри прилад виконує в частотному діапазоні від 0,5 Гц до 90 кГц. Всі виміри записуються в більшу енергонезалежну пам'ять (64 МБ із можливіс-тю запису більше 40000 значень) і легко переносяться в комп'ютер, викори-стовуючи програму SVAN_PC і стандартні інтерфейси USB, або RS-232C.
Разом з модулями SV06A і SV08A представляє чотирьох-канальну вимірювальну систему (кожний з каналів незалежний), що дозволяє вимірювати інтегральні значення шуму й вібрації, а також виконувати 1/ 1-1- і 1/ 3-октавний і вузькосмуговий аналіз по всім чотирьох каналах у режимі реального часу.
Недоліки: мало модулів програмного забезпечення.
Переваги: можливість запису більше 40000 значень, разом з модулями SV06A і SV08A представляє чотирьох-канальну вимірювальну систему, його вплив на звукове поле в ході вимірів зведене до абсолютного мінімуму.
На рисунку 4.2 представлений Інтегруючий шумомір 1 класу – 2239A Bruel&Kjear, що відповідає наступним технічним вимогам:
· IEC 60651 і 60804 частина1; IEC 61672 Клас1
· ANSI S1.4 -1983 і S1.43-1997 частина1.
· Зручне й просте калібрування
· Наочність відображення вимірюваних параметрів.
· Два детектори, що працюють паралельно, з можливістю одночасного виміру середньоквадратичних і пікових значень.
· ![]() Рідкокресталічний екран з підсвічуванням
Рідкокресталічний екран з підсвічуванням
· Вбудована пам'ять для зберігання 40 протоколів вимірів.
![]()
Рис 4.2
Недоліки: обмежена пам'ять 40 протоколами, не має програмного забезпечення.
Переваги: можливість одночасного виміру середньоквадратичних і пікових значень
Модульний прецизійний аналізатор звукових сигналів
2260 Investigator TM з пакетами програмного забезпечення для
аналізу звуку BZ7201, BZ7202, BZ7206
![]() Дослідження шуму в навколишнім середовищі, октавний аналіз (BZ7201), октавний і 1/3 октавний аналіз (BZ7202 і BZ7206), моніторинг шуму, оцінка мір по зниженню шуму, одержання даних для подальшого аналізу, дослідження й удосконалення устаткування. Шумомір типу 1 згідно IEC і ANSI. Частотний діапазон 8 Гц - 20 кГц для 1/3 октавного аналізу (тільки для BZ7206). Анотації під час вимірів і виключення даних вимірів. Має внутрішню пам'ять ємністю 20 Мбайт. Керування записом звуку на комп`ютер. Автоматична реєстрація подій. Часовий інтервал реєстрації до 100 мсек (тільки для BZ7206). Інтерфейс для цифрових магнітофонів SONY.
Дослідження шуму в навколишнім середовищі, октавний аналіз (BZ7201), октавний і 1/3 октавний аналіз (BZ7202 і BZ7206), моніторинг шуму, оцінка мір по зниженню шуму, одержання даних для подальшого аналізу, дослідження й удосконалення устаткування. Шумомір типу 1 згідно IEC і ANSI. Частотний діапазон 8 Гц - 20 кГц для 1/3 октавного аналізу (тільки для BZ7206). Анотації під час вимірів і виключення даних вимірів. Має внутрішню пам'ять ємністю 20 Мбайт. Керування записом звуку на комп`ютер. Автоматична реєстрація подій. Часовий інтервал реєстрації до 100 мсек (тільки для BZ7206). Інтерфейс для цифрових магнітофонів SONY. ![]() Дистанційне керування через модем. Автоматичне калібрування індексацією заряду (CIC). Широкосмугова й спектральна статистика.
Дистанційне керування через модем. Автоматичне калібрування індексацією заряду (CIC). Широкосмугова й спектральна статистика.
Переваги: Портативний програмувальний аналізатор звуку 2260 базується на стандартної архітектурі й файлової системі персонального комп`ютера. Характеристики аналізатора можна змінити шляхом заміни пакета програмного забезпечення. Опції програмного продуктів, забезпечуючи
автоматичну вибірку подій, запис даних, дозволяють розширити можливості системи.
Огляд шумоміру вітчизняного виробництва.
ОКТАВА-101А
Шумомір-Аналізатор спектра призначений для виміру середньоквадра-тичних, евілентних і пікових рівнів звуку, рівнів звукового тиску (УЗД) в октавні й 1/3 октавних смугах частот з метою оцінки впливу звуку й інфразвуку на людину на виробництві й у жилих і суспільних будинках, визначення акустичних характеристик механізмів і машин, а також наукових досліджень. Живлення: вбудована акумуляторна батарея від мережі 220 В через блок живлення-зарядний пристрій. Режими вимірів звук, інфразвук
Клас точності 1. Діапазон вимірів (з мікрофоном 50мВ\Па) 20-145 дба (СКА) Лінійний робочий діапазон 80 дб. Частотна корекція А, З, Лин (1Гц-20 кГц)
Частотний діапазон 1,6 Гц- 20 кГц(режим Інфразвук) 10 Гц-20 кГц(режим звук). Частотні фільтри 1/ 3-3- октавні фільтри 1,6 Гц-16 кГц октавні фільтри 2 Гц-16кгц (клас 1 по мек 1260)
Недоліки: система живлення, прилад не мобільний, не має програмного забезпечення.
Переваги: оцінка впливу звуку й інфразвуку.
Шумомір Ш-3М
В комплект входить мірофоний кабель довжиною 1,5 м .Шумомір допускає підключення до електричного виходу різни приладів: аналізатора, ![]() магнітофона, самописця. Вихідний опір 10 кОм, найбільша напруга на виході 0,8 В. Живиться шумомір від сухих батарей ГБ-СА-45(2 шт.) и НС-СА (3 шт.). Ємність батареї невелика, тому шумомір не можна зоставляти увімкнутим більш ніж 5 хв. Підряд. Стан батареї контролюють по рискі на шкалі стрілкового індикатора. Для калібрування приладу перемикач чутливості встановлюють в положення «калібровка». При цьому напруга з виходу підсилювача подається на вхід, та підсилювач самозбуджується. При цьому стрілка індик ара повинна знаходитись в межах калібрую чого сектору. Акустична калібровка відсутня.
магнітофона, самописця. Вихідний опір 10 кОм, найбільша напруга на виході 0,8 В. Живиться шумомір від сухих батарей ГБ-СА-45(2 шт.) и НС-СА (3 шт.). Ємність батареї невелика, тому шумомір не можна зоставляти увімкнутим більш ніж 5 хв. Підряд. Стан батареї контролюють по рискі на шкалі стрілкового індикатора. Для калібрування приладу перемикач чутливості встановлюють в положення «калібровка». При цьому напруга з виходу підсилювача подається на вхід, та підсилювач самозбуджується. При цьому стрілка індик ара повинна знаходитись в межах калібрую чого сектору. Акустична калібровка відсутня.
Недоліки: недостатньо велика ємність батарей, застаріла модель.
Переваги: Стрілковий прилад.
Враховуючи тенденцію збільшення шумового забруднення середовища приводяться вимірювачі шуму. Шум є важливим аспектом сучасного життєвого середовища й визначення його параметрів більше не надається лише фахівцям акустиці й вимірювальній техніці.
Схема, що розроблялась.
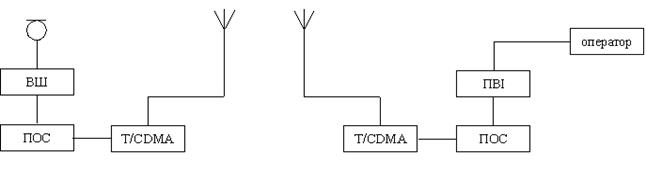
де: ВШ – вимірювач шуму;
ПОС – пристрій обробки сигналів;
![]() T/CDMA – телефон CDMA-стандарту (передача сигналів по радіоканалу);
T/CDMA – телефон CDMA-стандарту (передача сигналів по радіоканалу);
ПВІ – пристрій відображення інформації
Система розробляється для вимірювання рівню шуму та вібрацій. Застосування – контроль умов праці та атестація робочих місць також незалежна експертна оцінка шумового забруднення навколишнього середовища (для забудови тощо).
Головний конкурент- фірма «Спана»
4 . 2. Оцінка рівня якості виробу
4.2.1. Вихідні положення
Оцінка рівня якості виробу проводиться з метою порівняльного аналізу і визначення найбільш ефективного в технічному відношенні варіанту інженерного рішення.
При наявності кількісної характеристики властивостей виробу коефіцієнт технічного рівня можна визначити за формулою:
![]()
де ![]() - відносний (одиничний ) і-й показник якості,
- відносний (одиничний ) і-й показник якості,
![]() -
коефіцієнт вагомості і-го параметру якості
-
коефіцієнт вагомості і-го параметру якості
Відносні (одиничні) показники якості будь-якому параметру Ці якщо вони
знаходяться в лінії залежності від якості, визначаються за формулами:
![]() (2.2) або
(2.2) або
![]() (2.3)
(2.3)
де ![]() і
і ![]() - числові значення і-го параметру відповідно нового і базового виробів. Формула 2.2 використовується при розрахунку відносних показників якості, коли збільшення величини параметру веде до покращення якості виробу і формула 2.3 - коли із збільшенням величини параметру якість виробу погіршується. У випадку, коли зв'язок між параметрами і якістю виробу нелінійний, тоді використовуються наступні формули:
- числові значення і-го параметру відповідно нового і базового виробів. Формула 2.2 використовується при розрахунку відносних показників якості, коли збільшення величини параметру веде до покращення якості виробу і формула 2.3 - коли із збільшенням величини параметру якість виробу погіршується. У випадку, коли зв'язок між параметрами і якістю виробу нелінійний, тоді використовуються наступні формули:
![]()
![]() (2.4)
(2.4)
або
![]() (2.5)
(2.5)
Значення відносного показника якості повинно бути більше одиниці - при покращенні і-го показника якості і менше одиниці - при його погіршенні.
4.2.2. Обгрунтування системи параметрів виробу і визначення відносних показників якості
Можна використати цілий ряд показників - це показники призначення, надійності, конструкції, безпеки, ергономічні показники, естетичні, економічні й комерційні. Виберемо найбільш важливі показники :
- тип шумоміра - показник без якого не запрацює система;
- діапазон частот - важливий показник, який характеризує можливості
шумоміру;
- пакет для октавного й 1/3 октавного аналізу - один з важливих показників.
Ці найважливіші характеристики не можуть бути використанні для визначення показника конкурентноздатності, так як вони є цільовими показниками і визначають сектор ринку потенційних покупців.
Оберемо найважливіші параметри, що характеризують якість виробу:
X1 – Мобільність приладу.
Х2 - Частоний діапазон.
ХЗ – Вага та габарити приладу.
Х4 - Частотний аналіз в реальному часі.
Х5 - Ємність вбудованої пам'яті.
Х6 – Пакети програмного забезпечення.
![]() Таким чином, ми вибрали шість найбільш важливих параметрів, і тепер необхідно визначити коефіцієнт вагомості кожного з них.
Таким чином, ми вибрали шість найбільш важливих параметрів, і тепер необхідно визначити коефіцієнт вагомості кожного з них.
4.2.3 Визначення коефіцієнтів вагомості параметрів
Встановлення чисельних значень коефіцієнтів, що визначають важливість показників, виробляється спеціальною експертною комісією (5 чоловік). Після докладного обговорення й аналізу показників кожен експерт оцінює ступінь їхньої важливості шляхом присвоєння їм різних рангів. Найважливішому (на думку експерта) показнику ставиться ранг 1, менш важливому ранг 2 і т.д.
Результати експертного ранжирування показників приведені в таблиці 4.1
Таблиця 4.1
| Назва парам. |
Ранг параметру за оцінкою експерта |
Сума рангів |
Відхиле ння Δі; |
Δ2 |
||||
| 1-го |
2-го |
3-го |
4-го |
5-го |
||||
| XI |
1,0 |
2,5 |
1,5 |
1,0 |
1,5 |
7,5 |
-10 |
100,0 |
| Х2 |
2,0 |
1,5 |
3,0 |
2,0 |
1,5 |
10 |
-7,5 |
56,25 |
| ХЗ |
3,0 |
2,0 |
4,0 |
4,0 |
4,0 |
17 |
-0,5 |
0,25 |
| Х4 |
4,0 |
3,0 |
1,5 |
3,0 |
3,0 |
14,5 |
-3,0 |
9,0 |
| Х5 |
5,0 |
6,0 |
6,0 |
6,0 |
6,0 |
29,0 |
11,5 |
132,25 |
| Х6 |
6,0 |
6,0 |
5,0 |
5,0 |
5,0 |
27,0 |
9,5 |
90,25 |
| Сума |
21,0 |
21,0 |
21,0 |
21,0 |
21,0 |
105,0 |
0,0 |
388 |
Перед подальшою обробкою необхідно перевірити суму рангів по кожному стовпчикові, що повинна дорівнювати: n*(n+1)/2=6*(6+1)/2=21, де n- кількість оцінюваних параметрів.
Визначення можливості використання результатів рангування показників для подальших розрахунків проводять на підставі розрахунку коефіцієнта конкордації (погодженості) експертних оцінок. Для цього:
а) визначається сума рангів кожного показника (по рядках) ![]() ,
,
![]() де
де ![]() - ранг і-го параметру, визначений 1-м експертом; N - кількість експертів.
- ранг і-го параметру, визначений 1-м експертом; N - кількість експертів.
Виконується перевірка загальної суми рангів, яка повинна дорівнювати Rі1=N*n*(n+1)/2=5*6*(6+1)/2=105;
б) підраховується середня сума рангів Т по формулі Т =(1/n)* Rі1=
=(1/6)*105=17,5;
в) визначається відхилення суми рангів по кожному параметру від
середньої суми Δi = Rі-T.
Сума відхилень за всіма показниками повинна дорівнювати нулю.
г) розраховується квадрат відхилень по кожному показнику Δі2 загальна сума квадратів відхилень
![]() ;
;
S=388
е) визначається коефіцієнт конкордації по формулі W=12*S/(N![]() *(n
*(n![]() -n)).
-n)).
Величина коефіцієнта конкордації може мати значення в діапазоні W < 1 ,0; у випадку повної узгодженості думок експертів W = 1 ,0; чим більше непогодженість думок експертів при рангуванні показників, тим менше величина W. W=0,9.
Порівнюємо з мінімально припустимою величиною Wн (для виробів електровимірювальної і радіотехніки Wн = 0,77) W>Wн , тому отримані дані заслуговують довіри І придатні для подальшого використання.
4.2.4 Оцінка попарного пріоритету показників
Використовуючи отримані від кожного експерта результати рангування показників, проводиться попарне порівняння всіх параметрів і результати заносяться в таблицю 2.2.
![]() Для цього послідовно порівнюються попарно всі показники і визначаються співвідношення в такий спосіб:
Для цього послідовно порівнюються попарно всі показники і визначаються співвідношення в такий спосіб:
а) якщо з розглянутої пари показників перший більш важливий стосовно
порівнюваного, пріоритет вихідного показника визначається терміном
''більш важливий" і йому присвоюється знак " > " /числова оцінка 1,5/ ;
б) якщо з розглянутої пари показників перший менш важливий стосовно
порівнюваного, пріоритет вихідного показника визначається терміном "менш
важливий" і йому присвоюється знак " < " /числова оцінка 0,5/ ;
в) якщо показники однаково важливі, то їхній пріоритет визначається терміном "рівноцінно" і йому присвоюється знак " = " /числова оцінка 1 ,0/. На підставі проставлених знаків попарного пріорітету визначається підсумок, виходячи з думок всіх експертів (таблиця 4.2).
Таблиця 4.2
| Параметри |
Експерти |
Результуючий показник |
Числове значення |
||||
| 1 |
2 |
3 |
4 |
5 |
|||
| ХІ,Х2 |
= |
> |
> |
> |
> |
> |
1,5 |
| ХІ,ХЗ |
> |
> |
> |
> |
> |
> |
1,5 |
| ХІ,X4 |
> |
> |
> |
> |
= |
> |
1,5 |
| ХІ,X5 |
> |
> |
> |
> |
> |
> |
1,5 |
| ХІ,Xб |
> |
> |
> |
> |
> |
> |
1,5 |
| Х2,ХЗ |
> |
> |
> |
> |
> |
> |
1,5 |
| Х2,X4 |
> |
> |
> |
> |
< |
> |
1,5 |
| Х2,X5 |
> |
> |
> |
> |
> |
> |
1,5 |
| Х2,X6 |
> |
> |
> |
> |
> |
> |
1,5 |
| ХЗ,X4 |
< |
< |
< |
< |
> |
< |
0,5 |
| ХЗ,Х5 |
> |
> |
> |
> |
> |
> |
1,5 |
| ХЗ,Х6 |
< |
> |
> |
> |
> |
> |
1,5 |
| Х4,X5 |
> |
> |
> |
> |
> |
> |
1,5 |
| Х4,X6 |
< |
< |
< |
< |
> |
< |
0,5 |
| Х5,Х6 |
> |
> |
> |
> |
> |
> |
1,5 |
![]() Отримані дані чисельної оцінки попарного пріоритету показників використовуються для розрахунку величин коефіцієнтів важливості кожного показника, що зручно виконувати, використовуючи матрицю (таблиця 4.3 ).
Отримані дані чисельної оцінки попарного пріоритету показників використовуються для розрахунку величин коефіцієнтів важливості кожного показника, що зручно виконувати, використовуючи матрицю (таблиця 4.3 ).
Таблиця 4.3
| Показник |
1-й крок |
2-й крок |
||||||||
| XI |
Х2 |
хз |
Х4 |
Х5 |
Х6 |
Ві |
|
Ві ` |
|
|
| XI |
1,0 |
1,5 |
1,5 |
1,5 |
1,5 |
1,5 |
8,5 |
0,236 |
49,8 |
0,251 |
| Х2 |
0,5 |
1,0 |
1,5 |
1,5 |
1,5 |
1,5 |
7,5 |
0,208 |
41,8 |
0,210 |
| ХЗ |
0,5 |
0,5 |
1,0 |
0,5 |
1,5 |
1,5 |
5,5 |
0,153 |
28,8 |
0,145 |
| Х4 |
0,5 |
0,5 |
1,5 |
1,0 |
1,5 |
1,5 |
6,5 |
0,181 |
34,8 |
0,175 |
| Х5 |
0,5 |
0,5 |
0,5 |
0,5 |
1,0 |
0,5 |
3,5 |
0,097 |
19,8 |
0,099 |
| Х6 |
0,5 |
0,5 |
0,5 |
0,5 |
1,5 |
1,0 |
4,5 |
0,125 |
23,8 |
0,120 |
| Сума |
36,0 |
1,0 |
198,5 |
1,0 |
||||||
Розрахунок вагомості (пріоритетності) кожного параметра фі проводиться за наступними формулами:
 ,
, ![]()
де ![]() - вагомість і-го параметру за результатами оцінок всіх експертів; визначається як сума значень коефіцієнтів переваги (
- вагомість і-го параметру за результатами оцінок всіх експертів; визначається як сума значень коефіцієнтів переваги (![]() ) даних усіма експертами по і-му параметру.
) даних усіма експертами по і-му параметру.
Аналізуючи останній стовпчик помічаємо, що найбільш важливим , на думку експертів, є параметр X1 – мобільність приладу.
4.3 Оцінка конкурентоспроможності виробу
Конкурентоспроможність - поняття відносне, чітко прив'язане до ринку, що носить визначений індивідуальний відтінок. Під конкурентоспроможністю ![]() варто розуміти ступінь відповідності виробу в даний момент обраному ринку по технічних, економічних, комерційних і інших параметрах.Звісно в даному випадку можна лише грубо оцінити пристрій по технічним характеристикам, так як пристрій являється виробом вузько цільового застосування і конкретно порівняти з іншим практично неможливо. В якості базового варіанта виберемо аналізатор звукових сигналів ОКТАВА-110А-BASIC" режим вимірів "Звук"+"Інфразвук"+"Ультразвук". На вибір базового виробу вплинули його високі характеристики. Найважливіші показники нашого виробу і базового наведені в таблиці 4.4.
варто розуміти ступінь відповідності виробу в даний момент обраному ринку по технічних, економічних, комерційних і інших параметрах.Звісно в даному випадку можна лише грубо оцінити пристрій по технічним характеристикам, так як пристрій являється виробом вузько цільового застосування і конкретно порівняти з іншим практично неможливо. В якості базового варіанта виберемо аналізатор звукових сигналів ОКТАВА-110А-BASIC" режим вимірів "Звук"+"Інфразвук"+"Ультразвук". На вибір базового виробу вплинули його високі характеристики. Найважливіші показники нашого виробу і базового наведені в таблиці 4.4.
Таблиця 4.4
| № |
Параметр |
В системі |
Базовий виріб |
| 1 |
Мобільність приладу |
10 |
10 |
| 2 |
Діапазон частот (Гц) |
8-20000 |
8-2000 |
| 3 |
Маса пристрою, кг |
0,5 |
0,5 |
| 4 |
Частотний аналіз в реальному часі. |
1/1, 1/3 |
1 |
| 5 |
Ємність вбудованої пам'яті, Мбайт |
100 |
20 |
| 6 |
Пакети програмного забезпечення |
3 |
0 |
Найдемо узагальнений показник якості по формулі: Кт.р =0,251*(1/1)+0,21*(1)+0,145*(0,5/0,5)+0,175*(1/0,3)+ +0,099*(20/100)+0,12*(0/3)=1,209
З приведених розрахунків видно , що розроблювальна система має більш високі технічним показники, з узагальненим коефіцієнтом якості Кт.р.=1,209
Конкурентоспроможність за економічними показниками, залежить від ціни споживання. Ціна споживання у свою чергу, складається з наступних елементів:
- витрати на транспортування до місця користування;
- експлуатаційні витрати;
- ціна покупки.
![]() Так як вага приладу складає 0,5кг. витрати на транспортування складуть мізерну частину відносно його ціни, якими можна знехтувати.
Так як вага приладу складає 0,5кг. витрати на транспортування складуть мізерну частину відносно його ціни, якими можна знехтувати.
Експлуатаційні витрати являють собою зарплату обслуговуючого персоналу, річні амортизаційні відрахування, витрати на поточні ремонти і допоміжні матеріали . Так як виріб працює цілком автономно - то ж не потребує обслуговуючого персоналу І в термін безвідмовної роботи ремонту не підлягає.
Отже практично єдиний параметр, що впливає на економічну конкурентноздатніїсть виробу - це його покупна ціна.
4.4. Розрахунок собівартості системи вімірювання шуму
Собівартість - грошова форма поточних витрат підприємства на виробництво й реалізацію продукції.
Собівартість продукції має велике значення для підприємства. Вона показує, наскільки ефективно використовуються методи й предмети праці при виготовленні продукції. Від собівартості залежать такі показники виробництва, як прибуток І рівень рентабельності, тому аналіз собівартості продукції виступає як важливий інструмент пошуку нових резервів підняття ефективності виробництва.
4.4.1. Калькуляція собівартості
Для розрахунку повної собівартості системи необхідно визначити усі витрати підприємства, пов'язані з виготовленням і реалізацією виробу, відповідно до затверджених нормативів.
4.4.2. Сировина та матеріали
![]() Витрати на придбання матеріалів по кожному найменуванню визначаються, виходячи з технічної норми витрати й оптової ціни одиниці матеріалу.
Витрати на придбання матеріалів по кожному найменуванню визначаються, виходячи з технічної норми витрати й оптової ціни одиниці матеріалу.
Таблиця 4.5
| № |
Найменування |
Од. Ним. |
Кільк. |
Ціна одиниці, грн. |
Сума, грн. |
| 1 |
ОКТАВА-110А-BASIC програмного забезпечення для аналізу звуку BZ7201, BZ7202, BZ7206 |
шт. |
1 |
36180,00 |
36180,00 |
| 2 |
Ноутбук HP 500 (RQ257AA) |
шт. |
1 |
2524,5 |
2524,5 |
| 3 |
Калібратор акустичний СAL-200 |
шт. |
1 |
6000 |
6000 |
| 4 |
Адаптер телеметрии 110-DOUT |
шт. |
1 |
1110,00 |
1110,00 |
| 5 |
Кабель USB |
шт. |
1 |
210,00 |
210,00 |
| 6 |
Програмне забеспечення 110-Util без телеметрії |
шт. |
1 |
2100,00 |
2100,00 |
| 7 |
Невраховані матеріали |
60,20 |
|||
| Разом |
48184,7 |
||||
| 8 |
Транспортні заготівельні витрати (5%) |
2409,235 |
|||
| Всього |
50593,935 |
||||
http://senator.com.ua/Shop/Details.aspx?Good=892717 ціни наведені на 24.05.07 (ноутбук)
http://www.ecolab.kiev.ua ціни наведені на 24.05.07 (шумомір та комплектуючі)
4.4.3 Витрати на покупні вироби й напівфабрикати
Витрати на покупні вироби і напівфабрикати визначаються аналогічно витратам на матеріали, виходячи з кількості на одиницю виробу, згідно схеми тракту і ціни за одиницю комплектуючих.
Так, як ми розробляємо систему з окремих вже готових приладів, то напівфабрикати нам не потрібні.
4.5 Основна заробітна плата
![]() Дана стаття містить у собі тарифну зарплату, по даним НДІ "Радіовимірювач" станом на грудень 2005 року, доплати і надбавки. Витрати за цією статтею розраховуються по кожному виду робіт (операцій) залежно від норми часу (нормативної трудомісткості) та погодинної тарифної ставки робітників
Дана стаття містить у собі тарифну зарплату, по даним НДІ "Радіовимірювач" станом на грудень 2005 року, доплати і надбавки. Витрати за цією статтею розраховуються по кожному виду робіт (операцій) залежно від норми часу (нормативної трудомісткості) та погодинної тарифної ставки робітників
 ,
,
де С Ti . — погодинна тарифна ставка для і-го виду робіт (операцій),грн;
t Ші . - норма часу для і-го виду робіт (операцій), н. годин.
Загальну трудомісткість виробництва виробу (блока, вузла) можна приблизно визначити за формулою
 ,
,
де Т B - трудомісткість виробництва виробу, годин;
Т C . M - трудомісткість складально-монтажних робіт, годин;
К C . M — питома вага цих робіт у загальній трудомісткості виробництва виробу (Табл. 4.6).
Таблиця 4.6
| Вид робіт |
Тип виробництва |
|
| Одиничне та мілкосерійне |
Масове та крупносерійне |
|
| 1. Монтажні 2. Складальні |
0,13-0,2 0,2 - 0,25 |
0,2 - 0,28 0,15-0,2 |
Орієнтовно трудомісткість виробництва радіоелектронних виробів можна також визначити за слідуючими даними: заготівельні роботи - 0,2-0,4, механічна обробка - 0,3-0,4, складальні роботи - 0,2-0,4нормо-години на 1 кг маси конструкції, монтажні роботи — 0,5-1,2 нормо-години на кожні 100 точок пайки. Інші невраховані роботи можуть бути прийняті у розмірі 20-25% сумарної трудомісткості врахованих робіт.
![]() Розрахунок основної заробітної плати виробничих робітників зведений у таблицю 4.7.
Розрахунок основної заробітної плати виробничих робітників зведений у таблицю 4.7.
Таблиця 4.7
| Найменування робіт (операцій) |
Середня часова тарифна ставка, грн |
Норма часу, годин |
Сума, грн |
| 1.Складальні робити |
2,6 |
2 |
5,20 |
| 2.Оформлення документації |
2,1 |
8 |
16,8 |
| Разом |
22 |
||
| 9. Доплати (25%) |
5,5 |
||
| 10. Надбавки (25%) |
5,5 |
||
| Всього |
33,00 |
||
4.5.1 Додаткова заробітна плата
Додаткова заробітна плата визначається у відсотках від основної
зарплати (норматив 30%): 33*0,3=9,9грн.
Повна заробітна плата відповідно:
33+9,9 =42,9 грн.
Норму нарахування на зарплату визначають по сумі основної і додаткової зарплати.
4.5.2 Нарахування на заробітну плату
Це нарахування в пенсійний фонд, фонд соціального страхування, фонд страхування на випадок безробіття та фонд страхування від нещасного випадку на виробництві.
42,9*38%=16,302 грн
42,9+16,302=59,202 грн
4.5.3 Загальновнробничі витрати
![]() У загальновиробничі витрати включаються крім загальновиробничих спеціальних інструментів і пристроїв цільового призначення , утримання та експлуатацію устаткування. Даний норматив складає 200% від основної заробітної плати.
У загальновиробничі витрати включаються крім загальновиробничих спеціальних інструментів і пристроїв цільового призначення , утримання та експлуатацію устаткування. Даний норматив складає 200% від основної заробітної плати.
витрат витрати на: освоєння нового виробництва , відшкодування зносу.
33*2=66грн
4.5.4 Виробнича собівартість
Ці шість статей складають виробничу собівартість системи:
Таблиця 4.7 – Собівартість
| Стаття витрат |
Сума, грн. |
| 1. Спецобладнання для сиистеми |
30 |
| 2. Основна заробітна плата |
33 |
| 3. Додаткова заробітна плата |
9,9 |
| 4. Нарахування на заробітну плату |
16,302 |
| 5. Загальновнробничі витрати |
66 |
| Планова собівартість: |
155,202 |
Св = 155,202грн.
4.5.5Адміністративні витрати
Адміністративні витрати відносяться на собівартість виробу пропорційно основній заробітній платі. Становлять 100%
33*1= 33грн.
![]() 4.5.6 Комерційні витрати
4.5.6 Комерційні витрати
Витрати на збут складають 2-5% від виробничої собівартості виробу 33*0.05=1,65грн.
4.5.7 Калькуляція собівартості системи
Результати розрахунку по кожній зі статей витрати при виробництві підсилювача зведені в таблицю 4.8.
Таблиця 4.8
| № |
Найменування статті витрат. |
Сума , грн |
Питома вага , % |
| 1 |
Основні матеріали |
50593,935 |
0,7 |
| 2 |
Основна заробітна плата |
33 |
0,06 |
| 3 |
Додаткова заробітна плата |
9,9 |
0,05 |
| 4 |
Відрахування на соціальні потреби |
16,302 |
0,03 |
| 5 |
Загальновиробничі витрати |
66 |
0,04 |
| Виробнича собівартість |
50753,787 |
0,01 |
|
| 6 |
Адміністративні витрати |
33 |
0,06 |
| 7 |
Комерційні витрати |
1,65 |
0,05 |
| Повна собівартість |
50949,939 |
1 |
|
4.6 Нижня межа ціни
Нижня межа ціни (![]() ) захищає інтереси виробника продукції і передбачає, що ціна повинна покрити витрати виробника, пов'язані з
) захищає інтереси виробника продукції і передбачає, що ціна повинна покрити витрати виробника, пов'язані з ![]() виробництвом та реалізацією продукції, і забезпечити рівень рентабельності не нижчий за той, що має підприємство при виробництві вже освоєної
виробництвом та реалізацією продукції, і забезпечити рівень рентабельності не нижчий за той, що має підприємство при виробництві вже освоєної
продукції. Під повною собівартістю виробу будемо розглядати вартість за надану послугу оцінка рівня шуму. Спов =600 грн/год
![]() 600*1,05=630грн.
600*1,05=630грн.
![]() 630*1,2= 657грн.
630*1,2= 657грн.
(![]() 50.949,939*1,05=53.497,43595грн.
50.949,939*1,05=53.497,43595грн.
![]() 53.497,43595*1,2= 64.196,92314грн.,)
53.497,43595*1,2= 64.196,92314грн.,)
![]() де
де ![]() - оптова ціна підприємства, грн.;
- оптова ціна підприємства, грн.;
![]() - повна собівартість виробу, грн.;
- повна собівартість виробу, грн.;
Рн - нормативний рівень рентабельності, %,( РН =5%)
![]() - податок на додану вартість, % ,(
- податок на додану вартість, % ,( ![]() =
20%).
=
20%).
Необхідність врахування податку на додану вартість виникає у зв'язку з тим, що коли буде встановлюватись верхня межа ціни, а потім договірна ціна, то ціна базового виробу звичайно включає цей податок.
4.6.1 Верхня межа ціни
Верхня межа ціни (Цв.м.) захищає інтереси споживача і визначається тією ціною, яку споживач готовий сплатити за продукцію з кращою споживчою якістю: Цв.м.= ц б*к т.р.=500*1,35 = 675грн.,
де Цб. - ціна базового виробу, грн.
КТ.Р.- рівень якості нового виробу відносно базового.
4.6.2 Договірна ціна
Договірна ціна ( ЦДОГ ) може бути встановлена за домовленістю між виробником і споживачем в інтервалі між нижньою та верхньою лімітними цінами
ЦН.М. < ЦДОГ < Цв.м. 657<650<675
4.7 Визначення мінімального обсягу виробництва продукції
Економічні показники визначають мінімальний обсяг виробництва, за якого випуск продукції стає доцільним. Це залежить від співвідношення умовно-змінних, умовно-постійних витрат у складі собівартості продукції та договірної ціни.
Визначення складової умовно-постійних витрат спеціальних розрахунків та відповідної інформаційної бази. У складі умовно-змінні витрати складають 65-75%, а умовно-постійні - 25-35%.
Тоді при розрахунковій річній потужності ![]() шт. - собівартість річного випуску продукції (Ср) складе
шт. - собівартість річного випуску продукції (Ср) складе
![]()
де Q - річний обсяг випуску продукції, шт/рік (Q = 250 вимірів/рік);
а,b - відповідно умовно-змінні та умовно-постійні витрати у складі собівартості одиниці продукції (а=0,7;b=0,3);
СІІОВ - повна собівартість одиниці продукції, грн;
![]() - розрахункова виробнича потужність підприємства з випуску продукції шт./рік (
- розрахункова виробнича потужність підприємства з випуску продукції шт./рік (![]() =250 вимірів./рік).
=250 вимірів./рік).
Ср =0,7*600+0,3*600*250=45420 грн
Умовно-постійні витрати - 268,36
Умовно- змінні витрати - 626,17
Вартість річного випуску продукції
![]()
![]() =650*250=162500 грн
=650*250=162500 грн
![]() Побудуємо графік, на якому визначимо при якому обсязі продукції (Q1) виторг від реалізації продукції та її собівартість співпадають (прибуток дорівнює 0), що відповідає беззбитковості виробництва, та визначимо обсяг продукції (Q2), при якому буде досягнуто запланований рівень рентабельності.
Побудуємо графік, на якому визначимо при якому обсязі продукції (Q1) виторг від реалізації продукції та її собівартість співпадають (прибуток дорівнює 0), що відповідає беззбитковості виробництва, та визначимо обсяг продукції (Q2), при якому буде досягнуто запланований рівень рентабельності.
Аналітичне Q1 та Q2 можуть бути визначені за формулами:
Q1 =(0,3*50949,939*250)/(650-0,4*50949,939)= 194 вимірів
![]() (0,3*50949 *250*(1+15/100)) /(650-50949 *(1+15/100)) = 254 виміра
(0,3*50949 *250*(1+15/100)) /(650-50949 *(1+15/100)) = 254 виміра
Річний прибуток при досягненні запланованого рівня рентабельності складе:
![]() 650*254-50949 =165100грн.
650*254-50949 =165100грн.
Графік беззбитковості виробництва відображає вплив на прибуток обсягу виробництва, ціни продажу і собівартості продукції при поділі витрат на умовно-постійні й умовно-змінні (Рис. 4.9).
За допомогою цього графіка можна визначити так називаємий рівень беззбитковості - обсяг виробництва, за яким крива, що показує зміну виторгу від обсягу реалізації, перетинається з кривою, що показує зміну її вартості
![]()
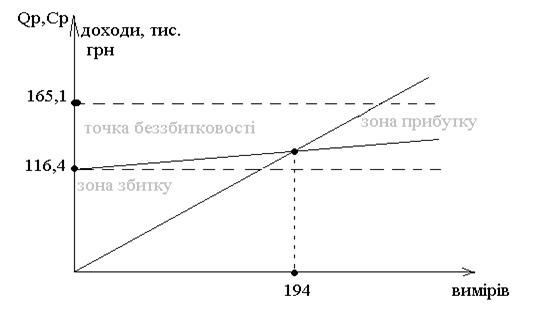
Рис.4.9
 5. Охорона праці
5. Охорона праці
5.1. Вступ
У данній частині дипломної роботи розглянуті шкідливі та небезпечні виробничі фактори, які можуть мати місце при розробці, виготовленні та експлуатації зпроектованого вимірювача шуму та розроблені заходи щодо зменшення їх пливу на людину.
Враховуючи той факт, що технічній частині дипломного проекту були враховані усі вимоги ДСНЗ 3.3.6.037-99 щодо захисту обслуговуючого персоналу від підвищених рівней шумів при налагоджуванні та експлуатації данного виробу, а також передбачена можливість ЗІЗ при перевищенні рівня шумів допустимих норм, то ці питання в данному розділі не розглядаються.
Основна увага приділена забеспеченню відповідних санітарно-гігієнічних умов праці, де виконуєтьця ця робота, а також питання стосовно безпечних умов праці при використанні ПЕОМ з урахуванням вимог Дсан ПіН3.3.2.007-98 та ДНАОП0.00-1.31-99. Також розглянуті питання енергозбереження та пожежної безпеки.
5.2. Санітарно-гігієнічна оцінка приміщення
Приміщення, оснащені ЕОМ, їхні розміри (площа, об’єм) повинні в першу чергу відповідати кількості працюючих і розташовуваному в них комплексу технічних засобів. У них передбачаються відповідні параметри температури, освітлення, чистоти повітря, забезпечують ізоляцію від виробничих шумів і т.п. Для забезпечення нормальних умов праці ДСанПіН3.3.2.007-98 встановлює : площа на одне робоче місце має становити не менше ніж 6 м2 , а об'єм не менше ніж 20м3 .
Приміщення являє собою кімнату розміром 4х 6 м, висотою 3м. Розмір дверного прорізу 1м. Приміщення знаходиться на вул. ак. Шпака на дев’ятому поверсі дев’ятиповерхового будинку, має бічне природне та штучне освітлення, центральне водяне опалення. У приміщенні два вікна розміром 1,8 х 2,2м, що орієнтовані на захід. Штучне освітлення забезпечує ![]() два люмінесцентних світильники з лампами ЛБ-40,
розміщених у ряд. Кількість робочих місць у кімнаті - два.
два люмінесцентних світильники з лампами ЛБ-40,
розміщених у ряд. Кількість робочих місць у кімнаті - два.
Стіни і стеля приміщення білого кольору, підлога з паркету темно-жовтого кольору, жалюзі на вікнах відсутні.
Площа й об’єм приміщення знаходимо по формулах
S=a*b
V = S * h
Де а - довжина, b - ширина, h - висота приміщення.
Маємо:
S=4* 6=24м2 , V=24*3= 72м3 .
Зведемо нормативні та фактичні дані виробничого приміщення в таблицю5.1.
Таблиця 5.1. Параметри приміщення
| Назва характеристики |
Нормативне |
Фактичне |
||
| Площа приміщення з розрахунку на 1 чоловік |
>6м2 |
12м2 |
||
| Об’єм приміщення з розрахунку на 1 чоловік |
>20м3 |
36м3 |
||
| Висота приміщення |
3 - 3.5м |
3м |
||
| Розміри дверей |
³1.1х1.8м |
1.4х2м |
||
| Відстань від стіни зі світловими прорізами до ВДТ ВДТ |
³1м |
1м |
||
Шкідливі речовини в приміщенні не зберігаються і не використовуються. Специфіка робіт вимагає спецодягу (чистий білий халат) та волого прибирання перед початком вимірів. Джерела запилення повітря в приміщенні відсутні. Вміст пилу в повітрі робочої зони не повинен перевищувати 4 мг/м 3 ГОСТ12.1.005-88. Оскільки у приміщенні проводяться щоденні вологі збирання, то можна вважати, що запилення повітря не перевищує припустимі значення.
На підставі отриманих результатів можна зробити висновок, що геометричні розміри приміщення цілком відповідають нормативним вимогам.
5.3. Аналіз шкідливих виробничих факторів при виконанні роботи, і розробка інженерних рішень для їх нормалізації.
5.3.1. Мікроклімат.
Під метеорологічними умовами виробничого середовища розуміють сполучення температури, вологості і швидкості руху повітря ДСН 3.3.6.042-99. Перераховані параметри впливають на функціональну діяльність людини, його самопочуття і здоров'я, а також на надійність засобів обчислювальної техніки.
На мікроклімат дуже впливають джерела теплоти, що існують у приміщенні. Основними джерелами тепла в приміщенні є ЕОМ і периферійне устаткування, прилади освітлення, співробітники.
Робота з обладнанням - сидяча, не зв'язана з фізичною напругою. Відповідно до ГОСТ 12.1.005-88 така робота відноситься до легких фізичних робіт і повинна бути віднесена до категорії 1а - роботи з витратою енергії до 120 ккал/ч.
Нормованими параметрами мікроклімату є температура і вологість повітря, а також швидкість його руху. Нормативні значення цих параметрів залежать від періоду року (теплий холодний).
У приміщенні опалення центральне водяне (батареї центрального водяного опалення в кількості 2 шт.), що включається в холодний і перехідний періоди року, що сприяє створенню нормальних умов праці. Для підтримки ![]() нормальних умов праці в приміщенні регулярно проводиться провітрювання і вологе збирання пилу.
нормальних умов праці в приміщенні регулярно проводиться провітрювання і вологе збирання пилу.
Вентиляції, як такої, у приміщенні не організовано. Замість цього здійснюється провітрювання через кватирку. Розмір кватирки - 0.6 x 1м, отже площа кватирки складає 0.6 м2 . Швидкість руху повітря за таких умов не перевищує 0.1 м/с.
Оптимальні, припустимі і фактичні параметри мікроклімату для температури, вологості і швидкості повітря приведені в таблицях 5.2, 5.3, 5.4. ДСН3.3.6.042-99
Таблиця 5.2. Температура
| Період -+ |
Категорія робіт |
Оптимальна |
Припустима |
Фактична |
| Холодний |
1а |
22-24 |
21-25 |
20-21 |
| Теплий |
1а |
23-25 |
22-28 |
22-23 |
Таблиця 5.3. Вологість
| Період |
Категорія робіт |
Оптимальна |
Припустима |
Фактична |
| Холодний |
1а |
40-60% |
75% |
60-70% |
| Теплий |
1а |
40-60% |
75% |
60-70% |
Таблиця 5.4. Швидкість повітря
| Період |
Категорія робіт |
Оптимальна |
Припустима |
Фактична |
| Холоднийнийний |
1а |
0.1м/с |
< 0.1 м/с |
Менш 0.1м/с |
| Теплий |
1а |
0.1м/с |
0.1-0.2м/с |
Менш 0.1м/с |
Для вимірювань кліматичних умов використовувались наступні прилади: психрометр аспіраційний МВ-4М, анемометр АРИ-49 та термометр ЭТП-М. Таким чином фактичні параметри мікроклімату задовольняють вимогам ДСН 3.3.6.642-99.
5.3.2. Освітлення робочої зони
Оскільки дуже велике навантаження при роботі з відеотерміналами приходиться на органи зору, то освітленість робочого приміщення є одним з найбільш критичних критеріїв, по якому варто оцінювати умови роботи.
Для запобігання перевантаження зорового апарата в приміщенні, для обробки варто використовувати матеріали, що дифузійно-відбивають, з наступними коефіцієнтами відображення: стеля - 0.7-0.8; стіни - 0.5-0.6; підлога - 0.3-0.5. У робочому приміщенні стеля пофарбована у білий колір, стіни пофарбовані в білий колір, підлогу покрито паркетом темно-жовтого кольору. Ці покриття ![]() мають необхідні коефіцієнти відображення і не перевантажують зоровий апарат.
мають необхідні коефіцієнти відображення і не перевантажують зоровий апарат.
Згідно з Дсан ПіН, співвідношення яскравості між робочими поверхнями повинне складати не більш 3:1. Ця умова досягається, тому що робоча поверхня тільки одна - монітор комп'ютера. Співвідношення яскравостей робочих поверхонь та поверхонь стін, обладнання тощо повинне бути не більш 5:1. Оскільки стіни пофарбовані в білий колір, то ця умова теж виконується.
Кімната повинна бути орієнтована вікнами на чи північ на північний схід. При орієнтації на інші сторони обрію повинні бути передбачені регулярні сонцезахисні пристрої типу жалюзі, розташовані зовні. Основний потік природного світла повинний бути виправлений ліворуч. Не допускається напрямок світла позаду, праворуч і попереду.
5.3.2.1. Природне освітлення
Вікно робочого приміщення виходить на захід. Освітлення приміщення відбувається за системою однобічного бічного освітлення. Місто Київ знаходиться в 4-ому поясі помірного клімату південніше 50 градусів північної широти.
Згідно з СНиПІІ-4-79 природне освітлення має здійснюватись через світлові прорізи, орієнтовані переважно на північ чи північний схід і зебезпечувати коефіцієнт природною освітленості (КПО) не нижче ніж 1,5%.
Тепер визначимо реальне значення коефіцієнта природної освітленості eр по формулі :
eр = (εб *q + εбуд *R) r1 t0 /Кз (5,3)
r1 — коефіцієнт, що враховує збільшення КПО при бічному освітленні завдяки світлу, відбитому від поверхні приміщення і підстильного шару, що прилягає до будинку, обумовлений по таблицях.
![]() Кз — коефіцієнт запасу, обумовлений по таблиці в залежності від концентрації пилу і розташування вікон;
Кз — коефіцієнт запасу, обумовлений по таблиці в залежності від концентрації пилу і розташування вікон;
Де εб - геометричний КПО в розрахунковій точці при бічному освітленні, що враховує пряме світло неба,
εб =0,01(n1 (n2 ’+ n2 )+ n1 ’ n2 ) (5.4)
n1 – кількість променів, що проходять від неба через світлові прорізи в розрахункову точку на поперечному розрізі приміщення;
n2 – кількість променів, що проходять від неба через світлові прорізи в розрахункову точку на плані приміщення;
q – коефіцієнт, що враховує нерівномірну яскравість хмарного неба МКО;
εбуд – геометричний КПО в розрахунковій точці при бічному освітленні, що враховує світло відбите від конфронтуючого будинку,
εбуд =0,01n1 ’n2 ’ (5.5)
n1 ’ – кількість променів, що проходять від протилежного будинку через світловий проріз у розрахункову точку на поперечному розрізі приміщення;
n2 ’ – кількість променів, що проходять від конфронтуючого будинку через світловий проріз у розрахункову точку на плані приміщення;
R – коефіцієнт, що враховує відносну яскравість конфронтуючого будинку, визначається в залежності від оздоблювального матеріалу стін і індексів конфронтуючого будинку в плані Z1 і розрізі Z2 ,
Z1 =lбуд *l/((p+l)a)
Z2 =H*l/((p+l)h1 ’)
Lбуд – довжина конфронтуючого будинку, м;
l – відстань від розрахункової точки в приміщенні до зовнішньої поверхні зовнішньої стіни будинку, у якому знаходиться розглянуте приміщення, м;
p – відстань між розглянутими будинками;
а – ширина вікна в плані, м;
H – висота конфронтуючого будинку, м;
h1 ’ – висота верхньої грані вікна над підлогою, м;
![]() r1
– коефіцієнт, що враховує збільшення КПО при бічному освітленні світлом, відбитим від поверхонь приміщення і підстильного шару, що прилягає до будинку; визначається в залежності від відношення глибини приміщення В до висоти верха вікна від рівня робочої поверхні h1
, відносини відстані l розрахункової точки від зовнішньої стіни до глибини приміщення В, відносини довжини приміщення ln
до його глибини В, середньозваженого коефіцієнта відображення поверхонь приміщення
r1
– коефіцієнт, що враховує збільшення КПО при бічному освітленні світлом, відбитим від поверхонь приміщення і підстильного шару, що прилягає до будинку; визначається в залежності від відношення глибини приміщення В до висоти верха вікна від рівня робочої поверхні h1
, відносини відстані l розрахункової точки від зовнішньої стіни до глибини приміщення В, відносини довжини приміщення ln
до його глибини В, середньозваженого коефіцієнта відображення поверхонь приміщення
rср =(r1 S1 +r2 S2 +r3 S3 )/(S1 +S2 +S3 )
r1 ,r2 ,r3 – коефіцієнт відображення відповідно стелі, стін і підлоги;
S1 ,S2 ,S3 – площа відповідно стелі, стін і підлоги;
t0 – загальний коефіцієнт светлопропускання.
За вікном навпроти є п’ятиповерховий будинок із дзеркальною обліковою на відстані 40 метрів.
Визначимо t0 по формулі :
t0 = t1 * t2 * t3 * t4 * t5
де t1 - коефіцієнт світлопропускання матеріалу склування рівний 0.8;
t2 - коефіцієнт, що враховує утрати світла в плетіннях світлопрорізу рівний 0,75,
t3 - коефіцієнт, що враховує утрати світла в несущих конструкціях рівний 1;
t4 - коефіцієнт, що враховує утрати світла в сонцезахисних пристроях, рівний 1;
![]() t5
- дорівнює 1 для бічного освітлення.
t5
- дорівнює 1 для бічного освітлення.
Отже t0 = 0.8 * 0.75 * 1 * 1 * 1 = 0.6
Знаходимо для даного робочого приміщення:
n1 = 46 – 42 = 4
n1 ’= 50 – 46 = 4
n2 = 24 – 20 = 4
n2 ’=39 – 24 = 15
На основі цих значень знайдемо εб , εбуд по формулам:
εб =0,01(n1 (n2 ’+ n2 )+ n1 ’ n2 )=0,01*(4*(15+4)+4*4)=0,92
εбуд =0,01n1 ’n2 ’=0,01*4*15=0,6
Потім знайдемо кутову висоту середини світлового прорізу над робочою поверхнею – 18°. З таблиці знайдемо значення нерівномірності яскравості неба q = 0,69.
Знайдемо Z1 і Z2 , з огляду на lбуд =30 м, p=40 м, H=17 м, l =3 м, a=1,8 м, h1 ’=2,8 м :
Z1 =lбуд *l/((p+l)a)=30*3/(41*1,8)=1,22
Z2 =H*l/((p+l)h1 ’)=17*3/(41*2,8)=0,44
Відповідно до обчислених значень знайшли значення коефіцієнта R, з огляду на що оздоблювальний матеріал фасаду конфронтуючого будинку – блоки облицьовані керамічні: R=0,26.
Для визначення коефіцієнта r1 вимірюємо :
В=4 м; h1 =2,8 м; l=3м; ln =4 м.
А також знаходимо середньозважений коефіцієнт rср , прийнявши r1 , r2 (відповідно стелі і стін)=0,7 , а r3 (підлоги)=0,1.
rср =(r1 S1 +r2 S2 +r3 S3 )/(S1 +S2 +S3 )=(0,7*16+0,7*12+0,1*16)/(16+12+16)=0,48
Значення В/ h1 =1,43; l/B=0,75; ln /B=1.
З таблиці знаходимо значення коефіцієнта r1 =1,3.
t0 =0,6 беремо з попередніх підрахунків.
![]() Коефіцієнт запасу для приміщень суспільних будинків при вертикальному освітленні світлових прорізів дорівнює Kз
=1,2.
Коефіцієнт запасу для приміщень суспільних будинків при вертикальному освітленні світлових прорізів дорівнює Kз
=1,2.
Обчислюємо Коефіцієнт природної освітленості за формулою (5.3) :
eр =( εб q+ εбуд R)r1 *t0/ Kз =(0,92*0,69+0,6*0,26)*1,3*0,6/1,2=0,514
Висновок: у даному приміщенні в денний час доби не допускається робота без штучного освітлення, тому що реальне значення коефіцієнта природної освітленості eр складає 0.514% і відрізняється від нормованого майже в 3 рази, що не допускається нормативами. Додатково може бути використане місцеве освітлення.
5.3.2.2. Штучне освітлення.
При штучному освітленні нормується значення освітленості в залежності від характеру зорової роботи ІІІ розряд зорової роботи, підрозрядд В. Згідно з СниП-4-79 значення освітленості на поверхні робочого столу в зоні розміщення документів має становити 300-500 лк. Коефіцієнт пульсації освітленості в приміщеннях з ЕОМ не повинен перевищувати 5%. При стабільній напрузі в мережі світильники не мають видимих пульсацій яскравості і задовольняють цій вимозі.
Задачею розрахунку є визначення потрібної потужності електричної освітлювальної установки для створення у виробничому приміщенні заданої освітленості. При проектуванні системи штучного освітлення застоcуємо метод світлового потоку (коефіцієнта використання).
В основу методу світлового потоку закладена формула
![]()
де Фл - світловий потік однієї лампи, лм;
Ен - нормована мінімальна освітленість, лк;
S - площа освітлюваного приміщення, м2;
Z - коефіцієнт мінімальної освітленості, обумовлений відношенням Еср/Еmіn значення якого для ламп накалювання і газорозрядних ламп високого тиску (ДРЛ, МГЛ, НЛВД) - 1,15, для люмінесцентних ламп - 1,1;
К - коефіцієнт запасу (див. додаток, табл. СНиП);
N - число світильників у приміщенні;
![]() n - число ламп у світильнику;
n - число ламп у світильнику;
h - коефіцієнт використання світлового потоку лампи (%), що залежить від типу лампи, типу світильника, коефіцієнта відображення стелі і стін, висоти підвісу світильників і індексу приміщення і.
Індекс приміщення (і) визначається по формулі
![]()
де А и В - довжина і ширина приміщення, м;
Нр - висота підвісу світильника над робочою поверхнею, м.
i = 16 / 0.4*8 = 5
де Фл - світловий потік однієї лампи, лм;
Ен, лк = 400;
S, м2 = 1,5;
Z коефіцієнт мінімальної освітленості = 1,15;
К - коефіцієнт запасу = 1,3;
N - число світильників у приміщенні = 1;
n - число ламп у світильнику = 1;
h - коефіцієнт використання світлового потоку лампи (%) = 69;
Тоді Фл = 100*400*1,5*1,15*1,3 / 1*1*69 = 89700 / 69 = 1300 лм
Проведений розрахунок свідчить про необхідність використання на робочих місцях ламп накалювання зі світловим потоком не меншим за 1300 лм.
Загальне штучне освітлення рв робочому приміщенні складається з чотирьох
![]() світильників по дві лампи в кожному. Світильники розташовані на стелі, перпендикулярно площі віконного прорізу. Тип ламп - ЛБ-40, потужність – 40Вт, номінальний світловий потік — 3120лм, щ задовільняє вимогам , щ задовільняє вимогам СниП.
світильників по дві лампи в кожному. Світильники розташовані на стелі, перпендикулярно площі віконного прорізу. Тип ламп - ЛБ-40, потужність – 40Вт, номінальний світловий потік — 3120лм, щ задовільняє вимогам , щ задовільняє вимогам СниП.
5.3.3. Електромагнітні та електростатичні поля ВДТПЕОМ.
Основним джерелом електромагнітних випромінювань на робочому місці дослідника є монітор комп'ютера. У процесі своєї роботи монітор випромінює широкий спектр електромагнітних випромінювань, що впливають на мозок і в першу чергу на очі оператора. Нормування шкідливих випромінювань та електромагнітного і електростатичного полів монітора виконується згідно ДсанПіН3.3.2.007-98. За допомогою таблиці 4.6 можна порівняти нормовані параметри електромагнітного електростатичного полів для моніторів з фактичними параметрами. Фактичні значення були взяті з технічної документації монітора. Модель монітора, що використовується за робочими місцями – Samsung 550B.
Таблиця 5.6 Параметри електромагнітного електростатичного полів.
| Параметр |
Нормативне значення |
Паспортні дані |
| Напруженість ЕМП по електричній складовій на відстані 50 см від поверхні монітора |
10В/м |
<6 В/м |
| Напруженість ЕМП по магнітній складовій на відстані 50 см від поверхні монітора |
0.3 А/м |
< 0.2А/м |
| Напруженість електростатичного поля |
20кВ/м |
< 10кВ/м |
| Поверхневий електростатичний потенціал |
500В |
< 270В |
|
|
25В/м 2.5 В/м |
20В/м 2 В/м |
| Щільність магнітного потоку: У діапазоні частот 5 Гц - 2 кгц 2кгц - 400 кгц |
250 нТл 25нТл |
200 нТл 20нТл |
Розташування монітора на відстані менш 1 м від стіни підсилює вплив відбитих випромінювань, що не є позитивною характеристикою, але не може бути усунуте через невеликий розмір робочого приміщення.
Вимірами встановлено, що максимальна напруженість електромагнітного поля на кожусі відеотермінала складає 3.6 В/м, у місці перебування оператора її величина складає 0.2 - 0.5 В/м, що відповідає фоновому рівню; градієнт електростатичного поля на відстані 0.5 м від екрана складає не менш 300 В/см, що задовольняє нормам.
Присутність персоналу на робочому місці протягом 8 годин допускається при напруженості електричного поля, що не перевищуює 5 кв/м. У такий спосіб захист від електромагнітних полів промислової частоти не потрібна.
Рівні УФВ та НРВ ВДТ ПЕОМ також відповідають нормам, оскільки на робочих місцях використовуються променеві ПЕОМ, що мають сертифікати відповідності санітарним нормам України.
5.4. Електробезпека
Електробезпека є одним із критичних питань для співробітників, що працюють з технікою, що одержує живлення з електричної мережі. При невиконанні норм електробезпеки можлива поразка електричним струмом. Системний блок ПЕОМ має відповідність до ГОСТ 12.2.007.0-75 І клас щодо електрозахисту електротехнічний виріб, ВДТПЕОМ, має подвійну ізоляцію: ізоляція блоку живлення і покритий пластмасою корпус (пластмаса зберігає ![]() від струму навіть у тому випадку, якщо корпус виявляється під напругою), але не має заземлення, тому відноситься до ІІ класу щодо електрозахисту.
від струму навіть у тому випадку, якщо корпус виявляється під напругою), але не має заземлення, тому відноситься до ІІ класу щодо електрозахисту.
Не виключена ситуація, коли корпус комп'ютера виявиться під напругою внаслідок порушення ізоляції проводів живлення комп'ютера або порушеній ізоляції корпуса. Якщо корпус буде без занулення, то в такому випадку людина може бути уражена електричним струмом.
Захист від короткого замикання здійснюється автоматом A312, від переходу напруги на корпус − зануленням.
Для запобігання поразки електричним струмом використовується ряд організаційно-технічних заходів: розташування проводів живлення поза зоною пересування людей; допуск до роботи в лабораторії людей, знайомих з технікою безпеки; використання мережних подовжувачів із вбудованими запобіжниками на 10 А.
Устаткування, застосовуване в приміщенні заживлюється від мережі 220 В з частотою 50 Гц. Споживачами цієї напруги є також джерела штучного освітлення. Вони розташовуються на висоті 2.8, що задовольняє нормі [6], відповідно до якої джерела освітлення повинні розташовуватися на висоті 2.5м від підлоги. Проводка схована. Як розетки для підключення устаткування застосовуються розетки з ізолюючим кожухом, що захищає від випадкового дотику до струмоведучих частин. Електроустаткування яке знаходиться в приміщенні в основному відноситься до установок напругою до 1000 В, виключення складають екранні пульти, дисплеї, у яких напруги живлення анодів електронно-променевих трубок складає декількох кіловольт.
Приміщення без підвищеної небезпеки, тому що відсутні умови, що створюють підвищену чи особливу небезпеку (вогкість, струмопровідний пил, струмопровідні підлоги, висока температура наявність хімічно активного середовища)(ОНТП24-86).
При аварійному режимі роботи електрообладнання напруги дотику не перевищують допустимі значення (Uдот
≤Uдоп
) Uдоп
=500В при часі ![]() спрацювання автоматів струмового захисту t менше 1сек. Еквівалентний опір зазаемлюючих пристроїв не перевищую 4 Ом згідно вимог ГОСТ 12.1.030-82 та ПБЕ. Таким чином, вимоги ПУЭ 76/87, ПБЕ ДНАОП 0.00-1.31-99 і ГОСТ 12.1.038-88 задовільнено.
спрацювання автоматів струмового захисту t менше 1сек. Еквівалентний опір зазаемлюючих пристроїв не перевищую 4 Ом згідно вимог ГОСТ 12.1.030-82 та ПБЕ. Таким чином, вимоги ПУЭ 76/87, ПБЕ ДНАОП 0.00-1.31-99 і ГОСТ 12.1.038-88 задовільнено.
5.5. Пожежна безпека
За даними статистики з загального числа пожеж, що відбуваються з причин несправного електроустаткування, близько 45% виникає через короткі замикання, 35% від електронагрівальних приладів, 13% від перевантаження електродвигунів і мереж, 5% від великих перехідних опорів.
По класифікації приміщень за вубихопожежною і пожежною небезпекою дане приміщення відноситься до категорії В (в наявності такі горючі матеріали – деревина, папір, ізоляція дротів живлення) за класифікацією ОНТП 24-86.
Робочі зони даного приміщення відноситься до зон класу П-ІІа згідно ПУЭ 76/87, ТиПБЕ ( до них відносять приміщення, у яких містяться тверді горючі речовини, нездатні переходити в зважений стан). У даному приміщенні знаходяться дерев'яні столи, шафи, полки, дерев'яний паркет. У приміщенні не ведеться робота з горючими чи легкозаймистими речовинами.
Найбільш ймовірною причиною пожежі в приміщенні є коротке замикання при порушенні ізоляції світлової чи проводки кабелів живлення комп'ютерів. Також можливе виникнення пожежі при недбалому використанні вогню.
З метою попередження виникнення пожежі в приміщенні виконується ряд організаційних заходів:
Розміщення кабелів живлення поза зонами переміщення персоналу, де вони можуть бути випадково ушкоджені.
Розміщення легкогорючих матеріалів (папір) на відстані від кабелів живлення.
Паління в спеціально відведених для цього місцях.
Виконання робіт з модифікації мережної проводки відповідальними за виконання подібних робіт людьми.
Робота в приміщенні виконується тільки персоналом фірми.
![]() Для підвищення оперативності реагування при виникненні пожеж у приміщенні використовується наступний комплекс заходів:
Для підвищення оперативності реагування при виникненні пожеж у приміщенні використовується наступний комплекс заходів:
обов’язковий інструктаж персоналу з питань охорони праці, зокрема, правила пожежної безпеки у приміщеннях з ЕОМ;
наявність шляхів евакуації при виникненні пожежі;
розміщення схеми евакуації людей при пожежі і ознайомлення з нею персоналу.
передбачено вільний доступ до мережевих вимикачів;
наяність вогнегасника - ОУ-2 (2 шт.) - клас точності «Е»
Як зазначено в ISO3941-77, для визначення необхідної кількості вогнегасників слід виходити з розрахунку 2 шт. на кожні 20 кв. м площі приміщення. Тобто на площу 16 м2 буде достатньо 2-х вогнегасників.
Мынымальний час евакуації, ширина евакуаційних виходів та проходів та максимальна віддаленість від них робочих місць задовольняють вимогам СниП2.01.02-85робочому приміщенні виконані усі вимоги НАПБА.01.001-95 «Правил пожежної безпеки в Україні»
5.6. Висновки
Після проведеного аналізу санітарно-гігієнічних умов праці, умов електробезпеки і пожежної безпеки приміщення можна зробити наступний висновок: переважна більшість чинників відповідає нормативним вимогам. ![]() Тобто умови праці в дослідному приміщенні можна вважати задовільними. Але все ж таки існують деякі невідповідності фактичних умов праці щодо норм. Тому можна запропонувати наступні рекомендації щодо показників, які не відповідають нормативам:
Тобто умови праці в дослідному приміщенні можна вважати задовільними. Але все ж таки існують деякі невідповідності фактичних умов праці щодо норм. Тому можна запропонувати наступні рекомендації щодо показників, які не відповідають нормативам:
a. рекомендується проводити більшість робіт в автоматичному режимі, в цей час знаходитись поза межами лабораторії;
b. після виконання робіт приміщення лабораторії необхідно провітрити.
ВИСНОВКИ
![]() У рамках даного проекту були розглянуті аналізатори акустичних сигналів, або шумоміри та розроблена система для дистанційного вимірювання шуму.
У рамках даного проекту були розглянуті аналізатори акустичних сигналів, або шумоміри та розроблена система для дистанційного вимірювання шуму.
Головний акцент у проекті зроблено на універсальність та віддаленість роботи з даним пристроєм. Завдяки цьому вимірювач шуму може працювати довший відрізок часу. Також основною перевагою розробленої системи є те, що всі результати, незалежно від кількості вимірів, фіксуються, що значно покращує роботу операторові при роботі з розробленою системою та з результатами вімірів шуму. Отримана система є також мобільною завдяки тому, що всі роботи по збору можна виконати за порівняно короткий проміжок часу - максимум за двадцять хвилин.
Також розглянута робота оператора, а саме: швидкодія, точність роботи оператора, час необхідний для прийняття рішень та інші часові характеристики.
Окрім того розглянуто помилки різного характеру для вимірів по точності, зокрема, помилки, пов’язані з акустичними завадами та звуковим полем.
Розроблена система може застосовуватись для вимірювання рівня шуму на підприємствах з метою попередження негативного впливу шуму на організм людини, для неперервного акустичного контролю приміщення у режимі інтелектуального датчика.
ЛІТЕРАТУРА
![]()
1. ГОСТ 17187-71. Шумомеры. Общие технические требования и методы испытаний.
2. Енс Трампе Брох. Применение измерительных систем фирмы «Брюль и Къер» для измерений акустического шума, Дания, 1971 г. – 224 с.
3. Дідковський В.С., Маркелов П.О. Шум і вібрація: Підручник. – К.: Вища школа., 1995. – 263с.
4. Дідковський В.С., Якименко В.Я., Запорожець О.І., Савін В.Г., Токарев В.І. Основи акустичної екології: Навчальний посібник.
5. Венда В.Ф. Инженерная психология и синтез систем отображения информации. М., 1982
6. Трофімов Ю.Л., Інженерна психологія: Підручник.- К.: Либіть, 2002-264с.
7. Осипов Г.Л., Лопашов Д.З., Федосеева Е.Н., Ильяшук Ю.М.. Измерение шума машин и оборудования: - М.: Издательство стандартов, мер.,1968
8. Лагунов Л.Ф., Осипов Г.Л., Борьба с шумом в машиностроении. М., Машиностроение., 1980
9. http://rada.gov.ua. Закон України «Про внесення змін до деяких законодавчих актів щодо захисту населенні від впливу шуму» від 03.06.2004,
10. http://rada.gov.ua. «Санитарные нормы допустимого шума в помещениях жилых и общественных зданий и на территории жилой застройки» от 03.08.1984.
11. http://www.ciklon.ru/pribor/prod.htm.
12. http://www.microchip.com. Bonnie C. Baker, «Comparing Digital Potentiometers to Mechanical Potentiometers», - 6 с.
13. www.tecon.com.ua
14. http://www.algoritm.ru/catalog/4/
15. http://www.algoritm.ru/catalog/13/#nazn
16. www.intron-set.com.ua
17. ![]() http://www.pribor.ru/a_ob/102.html
http://www.pribor.ru/a_ob/102.html
18. http://www.ecolab.kiev.ua
Похожие рефераты:
Електроніка та мікропроцесорна техніка
Розробка інвертора напруги для апаратури зв'язку
Детонометр разработка конструкции
Розвиток і вдосконалення льотної промисловості України
Розробка, дослідження системи керування на основі нейронної мережі
Мобільний термінал охоронної системи для автомобіля
Телевізійний приймач з можливістю прийому сигналів у форматі MPEG-2
Розробка двохсмугової активної акустичної системи з сабвуфером
Моделювання процесу обробки сигналів датчика у вихровому потоковимірювачі
Ремонт и регулировка мониторов для компьютеров
Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом
Система дистанционного контроля акустического окружения (шумомер)