| Скачать .zip |
Реферат: Система дистанционного контроля акустического окружения (шумомер)


Відзив
про роботу над дипломним проектом студента гр. ДЗ-92 ФЕЛ
Булавка Дмитра Ігоровича
на тему «Система дистанційного контролю акустичного оточення»
Людина живе в середовищі, фактор шуму якої грає не останню роль у його житті. Дослідженнями доведено, що під впливом шуму, навіть помірної інтенсивності, погіршується працездатність, особливо для розумової праці. Негативний вплив шуму тим сильніше, чим вище його тональність, тривалість впливу й неоднорідність спектрального складу в результаті імпульсних складових й окремих включень чистого тону. Тривалий вплив сильного шуму з рівнем від 90 дБ і вище може викликати в людини порушення слуху, розлад нервової системи й сприяти захворюванням серцево-судинної системи.
У процесі роботи над дипломним проектом був розроблений прилад, що на відміну від існуючих розробок порівняно невисокої вартості, що здійснюють фільтрацію, корекцію і аналіз аналоговим способом, у ній подібні функції реалізовані цифровим способом, що призводить до значного зниження вартості виробу і зменшення його габаритів. Також великою перевагою розробленого приладу є можливість функціонування у режимі інтелектуального датчика із підключенням до ЕОМ, що робить його універсальнім у користуванні та конкурентноздатним на ринку.
У цілому, вважаю, що даний дипломний проект заслуговує оцінки "добре", а її автор Булавко Дмитро Ігорович заслуговує присвоєння йому кваліфікації спеціаліста за спеціальністю 7.092401 „Телекомунікаційні системи та мережі”.
Керівник дипломного проекту проф. Пілінський В.В.
Рецензія
на дипломний проект студента гр. ДЗ-92 ФЕЛ
Булавка Дмитра Ігоровича
на тему «Система дистанційного контролю акустичного оточення»
Представлений на рецензію дипломний проект студента Булавка Дмитра Ігоровича. на тему «Система дистанційного контролю акустичного оточення» складається з пояснювальної записки 84 сторінок формату А4 та 6 креслень формату А1. та є конструкторською документацією на розроблений прилад, що здійснює спектральний аналіз рівня звукового тиску з частотною корекцією та без неї.
У першому розділі пояснювальної записки наведений аналітичній огляд існуючих аналогів, у другому розділі здійснений вибір оптимальної елементної бази, наведені алгоритми роботи пристрою на опис режимів його роботи. Третій розділ складається з розрахунків джерела живлення, часу роботи від елементу живлення, часу безвідмовної роботи та потужності схеми. У четвертому розділі здійснено розрахунок вартості науково-дослідної роботи, у п’ятому - розрахунок виробничого освітлення у приміщенні.
На кресленнях наведені: принципові схеми пристрою, структурна схема, друкована плата та складальне креслення модулю індикації та загальній вид пристрою.
Викладений матеріал демонструє теоретичні і практичні знання, отримані студентом.
У цілому, вважаю, що даний дипломний заслуговує оцінки „відмінно", а її автор Булавко Дмитро Ігорович заслуговує присвоєння йому кваліфікації спеціаліста за спеціальністю 7.092401 „Телекомунікаційні системи та мережі”.
Головний інженер ПП „Булавка Ігор Анатолійович”
Білоус Олена Анатоліївна

ANNOTATION
The degree project is made out as an explanatory note containing sheets,
tables, illustrations and a graphic part containing 6 sheets of А1 format.
The degree project is devoted to development of the device for acoustic environment measuring. It functions as in autonomous mode as in intellectual sensor mode. what makes it multi-purpose.
Using of a computer allows to make processing of the received information, and its storage with an effective utilization of storage devices.
Development is executed with use of import element base.
AUDIO-NOISE METER, NETWORK, SENSOR, NOISE, ACOUSTIC ENVIRONMENT, FAST FOURIER TRANSFORMATION, DECIBEL.
УДК 621.398.4.
РЕФЕРАТ
Дипломний проект оформлений у вигляді пояснювальної записки, що містить аркушів, таблиць, ілюстрацій і графічної частини - 6 аркушів формату А1.
Дипломний проект присвячений розробці пристрою для вимірювання характеристик акустичного оточення, що може працювати як і у автономному режимі, так і у режимі інтелектуального датчика, що робить його універсальним. Використання комп'ютера дозволяє робити обробку отриманої інформації, а також її зберігання з ефективним використанням запам'ятовувальних пристроїв.
Розробка виконана з використанням імпортної елементної бази.
ШУМОМІР, МЕРЕЖА, ДАТЧИК, ШУМ, АКУСТИЧНЕ СЕРЕДОВИЩЕ, ШВИДКЕ ПЕРЕТВОРЕННЯ ФУР’Є, ДЕЦИБЕЛ.
ЗМІСТ
|
Перелік умoвниx позначень і скорочень…………………………………………………. |
|
|
Вступ……………………………………………………………………………… |
|
|
1 Аналітична частина………………………………………………………. |
|
|
1.1 Огляд існуючих аналогів........................................................................ |
|
|
1.1.1 Аналізатори Bruel & Kjear................................................................... |
|
|
1.1.2 Прецизійний шумомір й аналізатор спектру ОКТАВА 101А.......... |
|
|
1.1.3 Вимірник шуму й вібрації ВШВ-003-М3............................................. |
|
1.1.4 Апаратура акустичного контролю VTS................................................ |
|
|
1.2 Основні параметри шуму……………………………………………….. |
|
|
1.3 Основні типи звукових полів у практиці вимірювань шуму…………….. |
|
|
1.4 Датчики шуму............................................................................................. |
|
|
1.5 Основні методи і засоби обробки акустичних сигналів……………….. |
|
|
1.6 Застосування частотної корекції............................................................... |
|
|
2 Синтез принципової схеми.......................................................................... |
|
|
2.1 Послідовний інтерфейс SPI....................................................................... |
|
|
2.2 Вибір інтерфейсу підключення...................................................................... |
|
|
2.3 Опис схеми модуля індикації...................................................................... |
|
|
2.4 Опис схеми головного модуля................................................................... |
|
|
2.5 Опис алгоритмів роботи пристрою............................................................ |
|
|
2.6 Режими роботи пристрою.......................................................................... |
|
|
3 Розрахункова частина..................................................................................... |
|
|
3.1 Розрахунок потужності схеми................................................................... |
|
3.2 Розрахунок джерела напруги...................................................................... |
|
|
3.3 Розрахунок надійності схеми..................................................................... |
|
3.4 Розрахунок часу автономної роботи виробу............................................... |
|
|
3.5 Розрахунок елементів кварцового генератора.......................................... |
|
|
4 Економічний розрахунок………………………………………………………. |
|
|
4.1 Оцінка трудомісткості науково-дослідної роботи................................... |
|
|
4.2 Визначення планової собівартості проведення НДР..................................... |
|
|
5 Охорона праці................................................................................................. |
|
|
5.1 Аналіз небезпечних і шкідливих виробничих факторів на робочому місці оператора............................................................................. |
|
|
5.2 Фізично небезпечні й шкідливі фактори................................................. |
|
|
5.3 Психофізіологічно небезпечні й шкідливі фактори.................................... |
|
|
5.4 Міри захисту від небезпечних і шкідливих виробничих факторів..... |
|
|
5.5 Розрахунок виробничого освітлення............................................................. |
|
|
5.7 Пожежна безпека ......................................................................................... |
|
|
5.8 Висновки........................................................................................................ |
|
|
Висновки......................................................................................................... Література…………………………………………………………………….. |
|
|
Додаток А. Технічне завдання......................................................................... |
|
|
Додаток Б. Головний модуль. Перелік елементів........................................... |
|
|
Додаток В. Модуль індикації. Перелік елементів............................................ |
ПЕРЕЛІК УМOBHИX ПОЗНАЧЕНЬ І СКОРОЧЕНЬ
АЦП – Аналогово-цифровий перетворювач;
ДПФ – Дискретне перетворення Фур’є;
ЕОМ – Електронно-обчислювальна машина;
ДКР – Дослідницько-конструкторська робота;
НДР – Науково-дослідна робота;
ТЕО – Техніко-економічне обґрунтування;
ЦАП – Цифро-аналоговий перетворювач;
ШПФ – Швидке перетворення Фур’є;
SCK – SPI Clock;
SDI – Serial Data-In;
SDO – Serial Data-Out;
SPI – Serial Peripheral Interface;
SS – Slave Select;
ВСТУП
Людина живе в середовищі, фактор шуму якої грає не останню роль у його житті. Дослідженнями доведено, що під впливом шуму, навіть помірної інтенсивності, погіршується працездатність, особливо при розумовій праці. Негативний вплив шуму тим сильніше, чим вище його тональність, тривалість впливу й неоднорідність спектрального складу в результаті імпульсних складових й окремих включень чистого тону.
Тривалий вплив сильного шуму з рівнем від 90 дБ і вище може викликати в людини порушення слуху, розлад нервової системи й сприяти захворюванням серцево-судинної системи. В останні роки з'явився навіть спеціальний термін «шумова хвороба».
Боротьба з усіма видами шумів - виробничими, вуличними, побутовими - представляє одну з найважливіших обов'язків органів санітарної інспекції й служби охорони праці на підприємствах. Виробництва, рівень шуму яких перевищує припустимі норми, віднесені до категорії шкідливих.
Для вимірювання шумових характеристик застосовують спеціальні прилади - шумоміри. Шумомір представляє автономний переносний прилад, що дозволяє вимірювати безпосередньо в децибелах рівні інтенсивності звуку в широких межах щодо стандартних рівнів.
Законом України „Про внесення змін до деяких законодавчих актів України щодо захисту населення від впливу шуму” від 03.06.2004 [5] було значно посилено контроль і відповідальність за порушення вимог законодавчих та інших нормативно-правових актів щодо захисту населення від шкідливого впливу шуму, що потребує розробки портативного універсального пристрою для вимірювання параметрів акустичного шуму, що має невисоку вартість відносно аналогів, що найчастіше являють собою складні дорогі програмно-апаратні комплекси, що відрізняються високою точністю й надійністю.
На підприємствах часто виникає питання щодо можливості контролю акустичного середовища у багатьох приміщеннях з метою оперативного реагування на відхилення від норми, подальшої обробки інформації та її зберігання, що потребує розробки апаратно програмного комплексу обробки інформації, в яких обчислення здійснює спеціалізований пристрій, сумісний з ЕОМ, а вторинну обробку отриманої інформації (накопичення, аналіз) – ЕОМ.
Таким чином метою даної роботи є розробка універсального приладу для контролю акустичного оточення, що може працювати так і в автономному переносному режимі, так і у складі апаратно-програмного комплексу, повинен бути дешевший за аналоги і мати простий інтерфейс користувача з метою можливості швидкого навчання роботи з ним.
1 АНАЛІТИЧНА ЧАСТИНА
1.1 Огляд існуючих аналогів
1.1.1 Аналізатори Bruel & Kjear
На сьогоднішній день існує велика кількість приладів, що служать для вимірювання рівня шуму й проведення його спектрального аналізу. Найчастіше ці прилади являють собою складні дорогі програмно-апаратні комплекси, що відрізняються високою точністю й надійністю.
Очевидним лідером у виробництві приладів, що вимірюють рівень шуму є фірма Bruel & Kjear, прилади якої дуже відомі у світі та відрізняються великою надійністю і вартістю.
Модель 2238 - високоякісний вимірник рівня звукового тиску 1го класу (рис 1.1). Прилад має змогу одночасно вимірювати середньоквадратичні і пікові значення за допомогою двох детекторів з незалежним частотним зважуванням. Прилад випускається з октавним й 1/3-октавним фільтром. 2238 виробляються в декількох модифікаціях - 2238А, 2238B, 2238С, 2238D, 2238E, 2238F, 2238G, 2238H.

Рисунок 1.1 – Аналізатор моделі 2238
Застосування:
вимірювання рівня шуму навколишнього середовища: скарги, моніторинг, оцінка;
професійна оцінка шуму;
вибір засобів захисту органів слуху;
шумове зменшення;
загальні вимірювання шуму в класі 1.
Інтегруючий шумомір 1-го класу 2239А є вимірником рівня звуку 1го класу точності (рис 1.2). Він спроектований таким чином, щоб робити швидкі й легкі вимірювання навколишнього шуму й вимірів у приміщеннях, пов'язаних з охороною здоров'я.
Результати вимірів відображаються на великому рідинокристалічному дисплеї, що містить квазіаналоговий рядок, що показує поточний рівень звукового тиску.
Інструмент містить два паралельних незалежні детектори. Це дозволяє відображати одночасно як середньоквадратичні, так і пікові значення.

Рисунок 1.2 - Інтегруючий шумомір 1-го класу 2239А
Використання:
контроль рівня шуму на робочому місці;
вимір потужності звуку;
спостереження за навколишнім шумом;
Застосування:
вимір рівнів звуку й рівнів звукового тиску.
визначення еквівалентних рівнів з метою оцінки шкідливих та подразнюючих впливів шуму, для використання з метою охорони праці та санітарного надзору.
оцінка шуму оточуючого середовища: від залізничних там автомобільних магістралей.
вимір шумів, що створюються машинним устаткуванням.
Особливості:
зручне і просте калібрування
наглядність відображення вимірюваних параметрів.
два детектора, що працюють паралельно, з можливістю одночасного вимірювання середньоквадратичних та пікових значень.
рідинокристалічний екран с підсвіткою
вбудована пам’ять для зберігання 40 протоколів вимірювань.
Діапазони:
динамічний діапазон: 80 дБ;
діапазон вимірів: від 26 дБ до 140 дБ.
Екран:
4-х рядковий рідинокристалічний;
швидкість відновлення даних на екрані: один раз у секунду;
підсвічування;
відображення вхідного рівня сигналу квазіаналоговим індикатором, що обновлюється 15 разів у секунду;
індикація часу початку виміру;
відображення частотних корекцій.
Послідовний інтерфейс:
швидкість обміну в бодах: 9600.
Вага й габарити:
460 г (з батареями);
257 х 97 х 41 мм.
1.1.2 Прецизійний шумомір й аналізатор спектру ОКТАВА 101А
Новий російський шумомір аналізатор спектра ОКТАВА-101А (рис. 1.3) відповідає всім сучасним вимогам до приладів даного типу й ні в чому не уступає закордонним аналогам. Прилад має два режими вимірів: „звук” й „інфразвук”. У режимі „звук” ОКТАВА-101А одночасно виконує функцію двох приладів: інтегруючого шумоміра 1 класу (МЭК 60651/60804) і аналізатора спектрів 1 класу (МЭК 1260).

Рисунок 1.3 - Прецизійний шумомір й аналізатор спектру ОКТАВА 101А
Одночасно в реальному часі виміряються загальні (Лін) і кореговані (А,С) рівні звуку й рівні звукового тиску в октавний й 1/3-октавних смугах частот 25 Гц - 16 кГц.
У режимі „інфразвук” прилад дозволяє в реальному часі одночасно бачити на екрані октавний й 1/3 октавний спектр 1,6 Гц - 20 Гц.
Результати вимірів можна зберегти в енергонезалежній пам'яті, а згодом видати знову на рідинокристалічний графічний індикатор або передати в комп'ютер по інтерфейсу RS-232.
Живлення приладу здійснюється від убудованої акумуляторної батареї або від мережного блоку живлення.
Для спеціальних додатків, що вимагають проведення вимірів вібрації, прилад ОКТАВА-101А може бути доукомплектований датчиком зі спеціальним перехідником.
1.1.3 Вимірник шуму й вібрації ВШВ-003-М3
Прилад ВШВ-003 М3 з 1/3 октавними фільтрами є малогабаритним, портативним вимірювальним приладом і призначений для виміру й аналізу шуму й вібрації в житлових і виробничих приміщеннях і використовується для визначення характеристик джерел і характеристик шуму й вібрації в місцях знаходження людей, при дослідженнях і випробуваннях машин і механізмів, при розробці й контролі якості виробів (рис 1.4).

Рисунок 1.4 – Вимірник ВШВ-003 М3
Прилад ВШВ-003 М3 має убудовані фільтри із частотними характеристиками А, В, С, а також смугові фільтри: октавні й третинооктавні, що дозволяють проводити класифікацію, вимір і визначення нормованих параметрів і характеристик шуму й вібрації відповідно до вимог санітарних норм і стандартів безпеки праці.
Прилад ВШВ-003 М3 поставляється в зручній для переносу сумці. Укомплектований п'єзоелектричними вимірювальними перетворювачами ДН-3-М1 і ДН-4- М1, що мають коефіцієнт перетворення відповідно 10 мВ см2/м й 1 мВ см2/м, конденсатором мікрофонним капсулем М-101, що має чутливість 50 мВ/Па, предпідсилювачем ВПМ-101, еквівалентами перетворювача й капсуля мікрофонного.
1.1.4 Апаратура акустичного контролю VTS
Апаратура призначена для аудіоконтролю й аудіоохорони приміщень. Можлива побудова системи охорони об'єкта із застосуванням автоматичного запису акустичної обстановки того або іншого приміщення, у якому спрацював датчик охорони. Система аудіоконтролю приміщень складається з набору високочутливих мікрофонів "МК-1" (рис. 1.5) , "МК-2", "МК-3" і пульта оператора (рис 1.6).

Рисунок 1.5 – Мікрофон МК-1
До пульту оператора входять:
плата комутації віддалених мікрофонів з індикацією обраного каналу;
мікрофонний попередній підсилювач і низькочастотний підсилювач потужності;
акустичні колонки;
схема узгодження з навушниками й входом магнітофона;
блок живлення 220 В АС.
Рисунок 1.6 - Пульт оператора
Комплектація апаратур, у загальному випадку, здійснюється високочутливими мікрофонами "МК-1" або "МК-3", а для приміщень із низькочастотними шумами система аудіоконтроля комплектується мікрофонами "МК-2". Віддалені мікрофони з'єднуються з пультом контролю по трьохпровідній лінії зв'язку.
![]() 1.2
Основні параметри
шуму
1.2
Основні параметри
шуму
Механічні коливання з частотою від 20 Гц до 20 кГц, що виникають у пружному середовищі, називають звуком. Чіткої різниці між поняттями «звук» та «шум» немає. Звуками, як правило, називають регулярні періодичні коливання, а шумом — неперіодичні коливальні процеси. При проведенні робіт щодо забезпечення нормальних умов життя людини шумом вважають будь-який небажаний звук незалежно від його характеру та природи виникнення. У цій книзі розглядається в основному промисловий шум, що виникає внаслідок роботи механізмів та устаткування.
Найбільш важливими параметрами шуму є звуковий тиск, інтенсивність звука та звукова потужність. У інженерній практиці ці величини виражають у логарифмічних одиницях, що пояснюється двома причинами:
реакція вуха людини на різну гучність має логарифмічний характер;
діапазон зміни цих параметрів надзвичайно широкий. Розглянемо зазначені параметри докладне
Звуковий тиск — це різниця між миттєвим значенням повного тиску і статичним тиском у даній точці. Він характеризує зміну густини середовища в напрямі поширення коливань. Кількісною оцінкою звукового тиску є середньо-квадратичне значення
 ,
(1.1)
,
(1.1)
де Т — час вимірювання; р(t) — миттєве значення звукового тиску.
Значення р вимірюють на певній відстані від джерела шуму в заданій смузі частот. Рівень звукового тиску L, дБ, визначають відносно порогового середньоквадратичного значення звукового тиску р0 = 2 • 10-5 Па за формулою
 .
(1.2)
.
(1.2)
Звуковою потужністю називають потужність звука, який випромінюється джерелом в усіх напрямах простору, що оточує джерело. У цьому розумінні це інтегральна характеристика шуму, який створюється джерелом. Зазначимо, що джерело звука випромінює звукову потужність, а звуковий тиск є наслідком цього випромінювання. Слух людини сприймає звуковий тиск, а причиною цього сприймання є звукова потужність джерела. Рівень звукової потужності LP, дБ, визначають відносно порогової потужності Р = 10-12 Вт за формулою
 (1.3)
(1.3)
Звукова потужність є мірою швидкості випромінювання звукової енергії, тобто звуковою енергією, що віднесена до одиниці часу.
Інтенсивність звука характеризує швидкість потоку звукової енергії в певній точці звукового поля. Рівень інтенсивності звука LI, дБ, визначають відносно порогового значення I0 = 10-12 Вт/м2 за формулою
 .
(1.4)
.
(1.4)
Зазначимо, що I0 = р02/ρс, де ρс — хвильовий опір повітря, який дорівнює 416 кг/(м2с).
Звуковий тиск та інтенсивність звука є точковими характеристиками звукового поля. Вони залежать від розташування точки вимірювання та умов поширення звукових хвиль. Звукова потужність не залежить від зазначених факторів, тому є унікальною мірою шумності даного джерела шуму.
1.3 Основні типи звукових полів у практиці вимірювань шуму
Звуковим полем називають простір, в якому поширюються звукові хвилі. У практиці вимірювань шуму звукові поля класифікують за наявністю відбивних перешкод (вільні й дифузні) та за відстанню від джерела звука (дальні та ближні).
Для вільного звукового поля характерне поширення звукових хвиль без відбивання. Ідеальні умови вільного поля можна створити на відкритому повітрі в місцях, що віддалені від об'єктів з великими відбивними поверхнями. На місці вимірювання не повинно бути сторонніх шумів. Однак можливість вимірювання шуму на відкритому повітрі залежить від метеорологічних умов і часу доби.
Умови вільного поля можна створити штучно в так званих заглушених камерах, де відбивання звукових хвиль від стін і стелі істотно послаблюються спеціальним облицюванням цих поверхонь звукопоглинальними матеріалами. Здебільшого для цього придатні звичайні приміщення достатньо великого об'єму.
Для дифузного звукового поля, навпаки, характерні багаторазові відбивання звукових хвиль, внаслідок чого ці хвилі поширюються в усіх напрямах з ідентичною амплітудою. Середня густина енергії звука однакова по всьому полю. Апроксимацією дифузного поля є акустичне поле в ревербераційному приміщенні.
Показниками якості ревербераційного приміщення є час реверберації та нерівномірність звукового тиску в усіх
![]()
![]()
![]()
![]() точках
внутрішнього
простору (за
винятком точок,
близьких
до відбивних
поверхонь).
Ревербераційна
камера тим
краща,
чим більший
час реверберації
і чим більша
рівномірність
у ній звукового
поля по всьому
робочому діапазону
частот.
точках
внутрішнього
простору (за
винятком точок,
близьких
до відбивних
поверхонь).
Ревербераційна
камера тим
краща,
чим більший
час реверберації
і чим більша
рівномірність
у ній звукового
поля по всьому
робочому діапазону
частот.
Дальнім називають звукове поле в достатньо віддаленій від джерела зоні простору, де напрям швидкості поширення частинок збігається з напрямом поширення звукової енергії, а інтенсивність звука пропорційна квадрату звукового тиску. Залежно від задачі вимірювання в акустиці застосовують різні кількісні критерії дальнього поля, наприклад співвідношення kr > 1 (k — хвильове число). У практиці вимірювань шуму машин вважають, що умови дальнього поля виконуються на відстані від джерела, яка більша, ніж довжина хвилі, або в 2...З рази перевищує найбільший лінійний розмір джерела. Звукову хвилю в дальньому полі можна розглядати як плоску чи сферичну. Поширення звука у вільному дальньому полі відповідає закону зворотних радіусів: р ~ 1/r, І ~ 1/r2.
Ближнє звукове поле — це сусідня до джерела звука зона, в якій напрям коливань не обов'язково збігається з напрямом поширення звукової енергії. У цьому полі звуковий тиск не може характеризувати звукову потужність джерела, оскільки реактивна складова ближнього поля, що враховується в процесі вимірювання тиску, не пов'язана з випромінюванням потужності. Проте слід зазначити, що реактивна складова ближнього звукового поля не впливає на результати вимірювання інтенсивності звука, оскільки остання пов'язана з потоком звукової енергії і тому реагує тільки на активну складову поля.
Придатність приміщення для вимірювання шуму в умовах вільного дальнього поля перевіряють експериментально. При цьому ставляться такі вимоги:
сторонній шум (перешкода), що проникає в приміщення, повинен бути слабкіший за сумарний шум агрегату та перешкоди не менше ніж на 10 дБ як за загальним рівнем, так і за рівнем окремих складових спектра в робочому діапазоні частот; у противному разі треба зробити поправку;
спад рівня звукового тиску в дальньому полі джерела звука при подвоєнні відстані від джерела до точки вимірювання має становити не менше ніж 6 дБ;
у приміщенні не повинно бути помітних стоячих хвиль, принаймні в місцях розміщення мікрофонів.
1.4 Датчики шуму
Мікрофони - це електроакустичні перетворювачі, що перетворюють звукові коливання на електричні. Залежно від конструкції розрізняють мікрофони тиску, а яких звуковий тиск впливає на діафрагму тільки з одного зовнішнього боку, та мікрофони градієнта тиску, в яких звуковий тиск впливає на два боки діафрагми, але з певним зсувом по фазі. У першому випадку зусилля на діафрагму визначається звуковим тиском, що діє на неї, а в другому — різницею тисків з обох боків діафрагми з урахуванням різниці фаз коливань.
Мікрофони повинні бути по можливості малих порівняно з довжиною хвилі звука розмірів, щоб не впливати на вимірюване звукове поле. Невеликі мікрофони можна використовувати в широкому діапазоні частот. Перевага невеликих мікрофонів полягає ще й у тому, що їхня характеристика напрямленості більш рівномірна. Тому при вимірюванні в тому разі, коли напрям поширення звука не зовсім збігається з віссю напрямленості мікрофона, виникає менше помилок. Проте внаслідок відносно невеликої чутливості цих мікрофонів застосовування їх при малих значеннях вимірюваних величин обмежене.
Залежно від характеру звукового поля розрізняють кілька показників чутливості мікрофона. У вільному полі напругу, що створюється мікрофоном, відносять до звукового тиску вільної плоскої біжучої хвилі, що рухається до центра мікрофона в напрямі його осі. Чутливість у дифузному полі становить відношення вихідної напруги до звукового тиску в цьому полі. Для визначення чутливості за тиском напругу на виході мікрофона відносять до звукового тиску, який фактично створюється перед мембраною мікрофона.
Для вимірювань використовують здебільшого конденсаторні мікрофони в основному внаслідок їхньої порівняно рівномірної частотної характеристики. Крім того, конденсаторні мікрофони стійкі до зміни температурного режиму, відрізняються високою стабільністю характеристик у часі й мають рівномірну діаграму напрямленості.
Останнім часом для вимірювань застосовують п'єзоелектричні мікрофони з термостійких матеріалів з достатньо великим п’єзоелектричним ефектом. У них використовується властивість п’єзоелектричних матеріалів створювати при механічній деформації напругу між електродами, які прикладені до пластин з цих матеріалів. У вимірювальних пристроях високого класу п’єзомікрофони застосовуються нечасто. Це пояснюється в основному низькою температурною стабільністю і дуже високим внутрішнім опором ємнісного типу. Останнє ускладнює підключення їх за допомогою довгих ліній, а також на навантаження з не великим опором. До переваг п’єзомікрофонів належать простота конструкції, невеликі розміри, висока чутливість.
Електродинамічні мікрофони майже завжди використовуються для порівняльних вимірювань. Вони мають дуже низький рівень власних перешкод, тому придатні для вимірювань слабких шумів.
При застосуванні мікрофонів треба враховувати низку факторів. Зокрема зазначимо, що чим більша частота вимірювання, тим меншим має бути розмір мікрофона. Щоб не перекручувати звукове поле, мікрофонні приймачі, з'єднувальні кабелі повинні мати невеликі розміри відносно довжини звукової хвилі, а відстань між мікрофоном та оператором, який обслуговує апаратуру, повинна становити не менше ніж 1 м. Крім того, слід звести до мінімуму наведені електричні та магнітні поля, особливо помітні при застосуванні довгих кабелів.
1.5 Основні методи і засоби обробки акустичних сигналів
Сигнали шуму та вібрації тут здебільшого вважаються випадковими процесами. Це обумовлено необхідністю врахування фактора випадковості при формуванні їх унаслідок нестабільності умов збудження, неможливості абсолютного повторення режимів роботи тощо. Крім того, акустичні сигнали вважаються стаціонарними процесами, що забезпечується сталістю процесу збудження коливань. Фізично виправдане для розглядуваних процесів також припущення про їхню ергодичність. Отже, акустичні сигнали в цій книзі вважаються стаціонарними ергодичними випадковими процесами (якщо немає додаткових уточнень). Це дає змогу застосувати для аналізу їх достатньо розроблену спектрально-кореляційну теорію.
Основним сучасним методом обробки сигналів шуму та вібрації є спектральний аналіз. Цей метод застосовують для оцінки основних спектральних характеристик сигналів шуму та вібрації — спектральних густин потужності, а також характеристик взаємозв'язку сигналів (взаємних спектрів, функцій когерентності та кореляції). Крім того, на підставі цих характеристик обчислюють частотні характеристики шляхів поширення коливань.
Сучасний спектральний аналіз шумових і вібраційних сигналів поділяється на аналіз з постійною смугою частот (Δf = const) і з постійною відносною смугою (Δfо/fо = const); остання, як правило, октавна чи третинооктавна. Тут Δf — ширина смуги аналізу (для ШПФ Δf часто називають також кроком за частотою), fо — центральна частота смуги. Вид аналізу та параметри відповідної апаратури вибирають залежно від задачі аналізу.
Якщо мета досліджень — визначення окремих дискретних складових, то слід вибирати вузькосмуговий аналіз з постійною смугою пропускання. Проте ця смуга не повинна бути занадто вузькою, оскільки під час роботи будь-якого джерела шуму та вібрації спектральні складові неминуче флуктують з плином часу за частотою. Смуга аналізу має охоплювати ці флуктуації; у противному разі результати спотворюватимуться.
При боротьбі з шумом та вібрацією методами звукоізоляції чи поглинання часто достатньо виявити інтенсивні частотні ділянки або зони цих процесів. У цьому разі більш доцільний аналіз з постійною відносною смугою пропускання. У будівництві застосовують здебільшого октавний аналіз, у машинобудуванні — третинооктавний.
На практиці часто вважають, що ширина смуги аналізу має бути приблизно (в крайньому разі) в 4 рази вужча за загальний частотний діапазон, який аналізується. Апаратура для спектрального аналізу промислового шуму та вібрації здебільшого не є специфічною тільки для аналізу механічних коливань, оскільки по суті аналізуються електричні коливання, що надходять від електроакустичного перетворювача.
Зараз спектральний аналіз здійснюють або смуговою фільтрацією сигналів, або на підставі ШПФ. Останнім часом для спектрального аналізу (зокрема обчислення дискретного перетворення Фур'є) дедалі більше використовують алгоритм ШПФ, особливо з появою швидкодіючих процесорів ШПФ. Головна перевага цього способу — можливість дістати порівняно вузькосмугові спектри, тобто можливість спектрального аналізу з високим розділенням за частотою.
В апаратному забезпеченні обробки віброакустичних сигналів формуються та розвиваються такі тенденції:
цифрове представлення віброакустичної інформації;
розробка спеціалізованих обчислювальних пристроїв на базі мікропроцесорів, що працюють за жорсткими алгоритмами. Переваги таких пристроїв — швидкодія, мобільність; недолік — низький ступінь універсальності;
розробка програмних комплексів, в яких процес обробки інформації здійснюється програмно ЕОМ, найчастіше персонального типу. При цьому сигнали вводяться безпосередньо в запам'ятовуючий пристрій ЕОМ у цифровій формі. Перевагами таких комплексів є високий ступінь універсальності, порівняно великий обсяг пам'яті, можливість порівняно просто збільшувати кількість каналів одночасного введення сигналів; недолік — порівняно невисока швидкодія. Отже, такі комплекси доцільно застосовувати в метою дослідження;
розробка програмно-апаратних комплексів обробки інформації, в яких обчислення спеціальної функції (наприклад, спектральної густини) здійснює спеціалізований пристрій, сумісний з ЕОМ, а вторинну обробку добутих функцій (накопичення, аналіз) — ЕОМ. Такий варіант, незважаючи на порівняно високу вартість, має менше недоліків двох перших і тому розвивається найбільш інтенсивно.
1.6 Застосування частотної корекції
Найпростішою фізичною мірою шуму є вимір його повного рівня звукового тиску. З іншого боку, такий вимір не дає ніякої інформації ні про розподіл частот шуму, ні про його сприйняття людиною, тобто практично таке вимірювання буде не ефективним. Однак за допомогою простих засобів вимірювальну апаратуру можна забезпечити деякими характеристиками, що дозволяють зробити результати вимірів набагато ефективніше. Застосовується набір частотних коригувальних фільтрів, характеристики яких індексовані літерами А, В, С. Характеристика з індексом С мало залежить від частоти в значній частині звукових частот, у той час як характеристика з індексом А перебуває в сильній залежності від частот нижче 1000 Гц. Порівнюючи частотну характеристику А с кривими рівня рівної гучності для чистих тонів можна виявити деяку подібність між останніми й оберненою А характеристикою. Навіть незважаючи на те, що процес сприйняття звуків людиною набагато складніше апроксимації за допомогою частотної корекції, як це представлено кривою А, в багатьох випадках інформація може бути отримана в результаті вимірів за допомогою апаратури за характеристикою А. Останній довід також підтверджується тим, що існуючі національні й міжнародні стандарти, що регламентуюсь вимірюванні та оцінці рівня шуму головним чином рекомендують застосування коригувальної характеристики А.

Рисунок 1.8 - Коригувальні характеристики А, В, С, D
Для того, щоб розрізняти фізичні вимірювання рівнів звукового тиску в децибелах (дБ) (без частотної корекції) від суб'єктивного виміру рівнів гучності у фонах і вимірів, зроблених за допомогою однієї з уведених стандартних частотних характеристик А, В, С (або D), прийнята міжнародна угода про те, що результати останнього виду вимірів повинні бути виражені у вигляді рівнів звуку з використанням шкали децибел із вказівкою виду частотної коригувальної характеристики А, В, або С (або D). Якщо, наприклад, шум вимірюється з використанням корекції А, то результат повинен бути представлений у вигляді дБ(А). Аналогічно, якщо виміру шуму проводилися з використанням корекцій В та С (або D), ці результати повинні бути виражені відповідно дБ(В), дБ(С) або дБ(D).
Існують випадки, коли при вимірюваннях необхідна набагато більш вичерпна інформація про рівень шуму. Цю інформацію можна одержати, проводячи частотний аналіз шуму; аналіз, що часто проводиться у вигляді октавних, третинооктавних або ще більш вузьких смуг частот. З докладного частотного аналізу спектра шуму може бути отримана найбільш придатна інформація про звук, що досліджується.
2 СИНТЕЗ ПРИНЦИПОВОЇ СХЕМИ
Фірма MICROCHIP випускає 3 лінії 8-бітних КМОП мікроконтролерів, відомих як PIC16Fxx, PIC18Fxx й PIC17Fxx.
Усі мікроконтролери виконані за RISC технологією, мають схему запуску по включенню живлення, вартовий таймер, що програмується, біт захисту від зчитування, припустимий струм по кожному виході до 20 мА й низьке енергоспоживання - 2 мВ при при живленні 5 В на тактовій частоті 4 МГц; 15 мкА при живленні 3 В на тактовій частоті 32 кГц й менше 3 мкА в режимі очікування.
2.1 Послідовний інтерфейс SPI
Мікроконтролери CP PIC16F877, MCP41050 та CP PIC18F258, що використовуються у приладі, містять послідовний периферійний інтерфейс SPI (Serial Peripheral Interface), призначений для обміну даними один з одним.
Принцип роботи послідовного обміну даними, реалізованого у мікроконтролерах, одержав назву "Master-Slave" (буквально - "Хазяїн-раб" або "Ведучий-ведений"), ілюструється схемою на рис. 2.1.
Рисунок 2.1 – Принцип роботи SPI
Один із пристроїв, що беруть участь в обміні даними, є ведучим, інший - веденим. Обмін здійснюється по чотирьох сигнальних лініях. Їх призначення зазначені в таблиці 2.1.
Таблиця 2.1 Призначення сигнальних ліній
|
SDO |
Serial Data-Out (послідовне виведення даних) |
|
SDI |
Serial Data-In (послідовне введення даних) |
|
SCK |
SPI Clock (синхронізація) |
|
SS |
Slave Select (вибір веденого) |
Обидва пристрої, що приймають участь в обміні даними, містять регістр зсуву. Регістри з'єднуються в коло, як показано на з використанням відповідних входів SDl і виходів SDO. Зсув здійснюється по фронту імпульсу синхронізації, при цьому ведучий передає веденому один біт зі свого регістра зсуву, одержуючи біт з регістра останнього. Очевидно, якщо ведучий подасть на шину синхронізації SCK число імпульсів, рівне розрядності регістрів, то інформація з його регістра повністю передасться веденому, і навпаки. Розрядність переданих слів - 8 біт.
Для того щоб можна було апаратно вибирати одного з декількох ведених мікроконтролерів, використається додаткова лінія інтерфейсу SS.
Крім цього, вибір веденого може також здійснюватися передачею ведучим адресного байта. Останній приймається всіма веденими й рівняється із привласненими їм адресами. При збігу ведений активує лінії свого інтерфейсу й здійснює необхідний обмін даними.
2.2 Вибір інтерфейсу підключення
При організації зв’язку між ЕОМ та шумоміром, що працює у режимі датчика, необхідно зробити вибір відносно інтерфейсу передачі даних від приладу до ЕОМ та у протилежному напрямі. Контролер CP PIC18F258, що використовується у приладі, має можливість передавати сигнали по інтерфейсу RS-232. Логічному „0” відповідає рівень сигналу 0 В, логічній „1” – 5 В. Цей інтерфейс не дозволяє передавати інформацію на великі відстані, тому що сильно піддається дії завад.
Інтерфейс повинен бути завадостійким, дозволяти здійснювати підключення декількох приладів та бути достатньо простим при реалізації.
Цим вимогам відповідає послідовний інтерфейс RS-485.
Інтерфейс RS-485 (інша назва - EIA/TIA-485) - один з найпоширеніших стандартів фізичного рівня зв'язку. Фізичний рівень - це канал зв'язку й спосіб передачі сигналу.
Мережа, побудована на інтерфейсі RS-485, являє собою прийомопередатчики, з'єднані за допомогою крученої пари - двох скручених дротів. В основі інтерфейсу RS-485 лежить принцип диференціальної (балансової) передачі даних. Суть його полягає в передачі одного сигналу по двох проводам. По одному дроті (умовно A) передається оригінальний сигнал, а по іншому (умовно B) - його інверсна копія. Якщо на одному дроті "1", то на іншому "0" і навпаки. Таким чином, між двома проводами крученої пари завжди є різниця потенціалів: при "1" вона додатна, при "0" – від’ємна.
Саме цією різницею потенціалів і передається сигнал (рис. 2.2).

Рисунок 2.2 – Диференціальна передача даних
Такий спосіб передачі забезпечує високу стійкість до синфазної перешкоди. Синфазною називають перешкоду, що діє на обидва дроту лінії однаково. Електромагнітна хвиля, проходячи через ділянку лінії зв'язку, наводить в обох проводах потенціал. Якщо сигнал передається потенціалом в одному дроті щодо загального, як в RS-232, то наведення на дріт може спотворити сигнал відносно добре поглинаючого наведення загального ("землі"). Крім того, на опорі довгого загального дроту буде падати різниця потенціалів земель - додаткове джерело спотворень. А при диференціальній передачі спотворення не відбувається. Таким чином, якщо два дроти пролягають близько один до одного і перекручені, то наведення на обидва дроту однакові. Потенціал в обох однаково навантажених проводах змінюється однаково, при цьому інформативна різниця потенціалів залишається без змін.
RS-485 - напівдуплексний інтерфейс. Прийом і передача йдуть по одній парі дротів з поділом у часі. У мережі може бути багато передавачів, тому що вони можуть відключаються в режимі прийому.
Структурна схема такого інтерфейсу зображена на рис. 2.3.
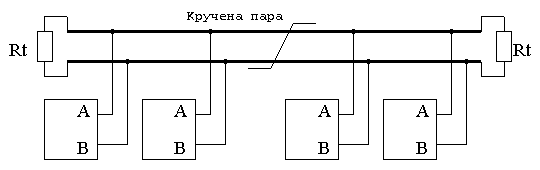
Рисунок 2.3 – Структурна схема підключення до інтерфейсу RS-485
Всі пристрої підключаються до одні крученої парі однаково: прямі виходи до одного дроту, інверсні - до іншого.
При великих відстанях між пристроями, зв'язаними по кручений парі й високих швидкостях передачі починають проявлятися так називані ефекти довгих ліній. Причина цьому - кінцевість швидкості поширення електромагнітних хвиль у провідниках. Швидкість ця істотно менше швидкості світла у вакуумі й становить більше 200 мм/нс. Електричний сигнал має також властивість відбиватися від вільних кінців лінії передачі і її відгалужень. Для коротких ліній і малих швидкостей передачі цей процес відбувається так швидко, що залишається непоміченим. Якщо відстань досить велика, фронт сигналу, що відбився наприкінці лінії й повернувся назад, може спотворити поточний або наступний сигнал. У таких випадках потрібно придушувати ефект відбиття.
У будь-якої лінії зв'язку є такий параметр, як хвильовий опір Zв. Він залежить від характеристик використовуваного кабелю, але не від довжини. Для крученої пари, що застосовується у системі, Zв=120 Ом. Якщо на вилученому кінці лінії, між провідниками кручений пари включити резистор з номіналом рівним хвильовому опору лінії, те електромагнітна поглинається на такому резисторі. Звідси його назви - резистор, що погодить, або "термінатор".
Максимальна швидкість зв'язку по специфікації RS-485 може досягати 10 Мбіт/сек. Максимальна відстань (для максимальної швидкості)- 1200 м. Якщо необхідно організувати зв'язок на відстані більшому 1200 м або підключити більше пристроїв, чим допускає навантажувальна здатність передавача - застосовують спеціальні повторювачі (репитери).
2.3 Опис схеми модуля індикації
Модуль індикації розроблений на основі мікроконтролера PIC16F877 (DD1). Для індикації використаються два восьмисегментних світлодіодних індикатори: один чотирьохрозрядний (HG1), один однорозрядний (HG2).
Однорозрядний індикатор відображає поточний режим роботи приладу. Режими роботи приладу детально розглянуті в розділі.
Чотирьохрозрядний індикатор використовується для відображення поточного значення рівня шуму в дБ для октавних смуг і виміру пікфактора, і в дБ(А) для виміру середнього рівня шуму. Десяткова кома фіксована і розташована після третього розряду числа, тобто число представляється з точністю до десятих часток цілого.
Слід зазначити, що індикатор HG1 є динамічним, тобто з поділом шини між чотирма розрядами в часі. Тому в схемі й використається контролер, що забезпечує роботу цього індикатора. Індикатор HG2 є статичним, і просто підключений анодними входами до порту D мікроконтролера.
У модулі індикації передбачено 4 світлодіоди (VD1..VD4). Один з них (VD1) запалюється, якщо на модуль надходить живлення. Інші 3 зарезервовані для майбутніх розробок.
Для керування приладом у модулі передбачено три кнопки (JP1..JP3). Дві з них (JP1, JP2) призначені для зміни режиму роботи, третя зарезервована для майбутніх розробок. Придушення дрязкіту контактів здійснюється програмним способом.
Живлення й сигнали модуля надходять від рознімача XP1. До цього восьмиконтактного штиркового рознімача підключається кабель, що з іншої сторони підключається до головного модуля.
Контролер модуля індикації зв'язується з головним модулем по інтерфейсу SPI. При цьому модуль індикації передає поточний режим роботи, а приймає чотири цифри, які необхідно відобразити на індикаторі.
Блок-схема роботи модуля індикації наведена на рис. 2.4.
Рисунок 2.4 - Блок-схема роботи модуля індикації
2.4 Опис схеми головного модуля
Головний модуль шумоміра складається із трьох функціональних блоків: джерела напруги, підсилювача й мікроконтролера.
Джерело напруги зібране на двох мікросхемах MC34063 фірми Motorola (DA2, DA3). Одна з них видає напругу +5 В, інша - -5 В. Схеми включення мікросхем узяті з відповідної технічної документації, розрахунок параметрів схеми наведений у розділі.
Підсилювач виконаний на операційному підсилювачі LM2902 фірми Philips. Фактично, у корпусі присутні чотири підсилювачі, але використаються тільки три. Два підсилювачі виведені на насичення (DA4.2, DA4.3), і використаються як джерела опорної напруги для АЦП мікроконтролера. Один підсилювач (DA4.1) включений за інвертуючою схемою. У вхідному ланцюзі підсилювача знаходиться резистор R1, у ланцюзі зворотного зв'язку - цифровий потенціометр MCP41050 фірми Microchip (DA1). Цифровий потенціометр керується мікроконтролером по інтерфейсу SPI.
Цифровий потенціометр дозволяє адаптивно міняти коефіцієнт підсилення, що дозволяє застосовувати вбудований у мікроконтролер 10-розрядним АЦП.
Для зв'язку приладу з ЕОМ використається інтерфейс RS-245. Контролер підтримує інтерфейс RS-232 тільки на логічному рівні.. Щоб одержати потрібні рівні напруги, використається перетворювач рівнів MAX232 (DD1).
Модуль містить чотири рознімачі (XP1..XP4). Рознімач XP1 підключається до мікрофона. Через рознімач XP2 модуль зв'язується з ЕОМ. Рознімач XP3 підключається до батареї напругою +9В або до зовнішнього джерела живлення. Для зв'язку з модулем індикації використається рознімач XP4.
Мікроконтролер PIC18F258 (DD2) використовується як і АЦП, так і для рахунку ШПФ.
Блок-схема роботи головного наведена на рис. 2.5.
Рисунок 2.5 - Блок-схема роботи головного модуля
2.5 Опис алгоритмів роботи пристрою
Модуль індикації виконує дві функції - відображає поточний стан пристрою й взаємодіє з користувачем за допомогою клавіш.
Для індикації передбачені два восьмисегментних світлодіодних індикатори й чотири світлодіода. На восьмисегментних індикаторах відображається режим роботи й поточне значення рівня шумового тиску.
Чотирьохрозрядний індикатор HG1 працює в режимі ущільнення часу. Це реалізується в такий спосіб. Анодні виводи індикатора підключені до восьмирозрядного порту мікроконтролера. Кожен вивід відповідає одному сегменту. Аноди розрядів з'єднані паралельно посегментно. Катодні виходи підключені до чотирьох розрядів порту мікроконтролера. Кожен катодний вихід відповідає одному розряду. Таким чином, подаючи логічний нуль на катодні висновки ми активізуємо один розряд індикатора. Вся схема працює в такий спосіб:
на всіх катодних висновках установлюється «1»;
на анодних висновках установлюється код символу;
на один катодний вивід виводиться «0»;
операція повторюється для кожного розряду.
Необхідно забезпечити частоту перемикання між розрядами не менш 20 кГц, щоб усунути мерехтіння. Реально частота значно вище.
Головний модуль служить для захвату сигналу з АЦП і розрахунком ШПФ. Захват здійснюється через убудований 10-розрядний АЦП мікроконтролера.
Рахунок ШПФ й основна програма реалізовані мовою С. Існують компілятори з мови С у машинні коди мікроконтролерів серії PIC18. Для рахунку ШПФ застосовується арифметика із плаваючою комою. Апаратно ці функції в контролері не реалізовані, а емулюються програмно. У контролері присутній апаратний множник 8х8, що дозволяє значно підвищити швидкість рахунку.
2.6 Режими роботи пристрою
При автономній роботі пристрій може вимірювати рівень шумового тиску в різних режимах. Поточний режим роботи відображається на індикаторі HG2 Перемикання режимів роботи здійснюється натисканням кнопок JP1 й JP2.
При функціонуванні у режимі датчика прилад передає інформацію по інтерфейсу RS-485 до ЕОМ, де здійснюється контроль і зберігання інформації, живлення пристрою здійснюється по крученій парі.
У таблицю 2.2 зведені всі режими роботи і їхнє коротке пояснення.
Таблиця 2.2 - Режими роботи пристрою
Символ |
Пояснення |
Х |
Режим підключення до ПЕОМ, калібрування, настроювання, відновлення ПО |
L |
Середнє значення рівня звукового тиску без частотної корекції |
A |
Середнє значення рівня звукового тиску із частотною корекцією по коригувальній кривій «А» |
B |
Середнє значення рівня звукового тиску із частотною корекцією по коригувальній кривій «B» |
C |
Середнє значення рівня звукового тиску із частотною корекцією по коригувальній кривій «C» |
D |
Середнє значення рівня звукового тиску із частотною корекцією по коригувальній кривій «D» |
1..8 |
Середнє значення рівня звукового тиску в октавних смугах |
P |
Максимальне значення рівня звукового тиску, отримане за час виміру. |
3 РОЗРАХУНКОВА ЧАСТИНА
3.1 Розрахунок потужності схеми
Розрахунок потужності виконуємо виходячи з типових струмів споживання окремих елементів схеми (таблиці 3.1 й 3.2).
Таблиця 3.1 - Струми споживання елементів схеми модуля індикації
Елемент |
Струм споживання, мА |
Кількість |
Загальний струм споживання, мА |
DD1 |
0,8 |
1 |
0,8 |
HG1 |
100,0 |
1 |
100,0 |
HG2 |
80,0 |
1 |
80,0 |
VD1..VD4 |
10,0 |
4 |
40,0 |
Таблиця 3.2 - Струми споживання елементів схеми головного модуля
Елемент |
Струм споживання, мА |
Кількість |
Загальний струм споживання, мА |
DD1 |
0,5 |
1 |
0,5 |
DD2 |
3,0 |
1 |
3,0 |
DA1 |
1,0 |
1 |
1,0 |
DA2, DA3 |
2,0 |
2 |
4,0 |
DA4 |
0,5 |
1 |
0,5 |
Підсумовуючи струми всіх елементів одержуємо струм споживання
I = 230 мА. (3.1)
При напрузі живлення 5В одержуємо потужність пристрою 1,15 Вт.
3.2 Розрахунок джерела напруги
Джерело напруги будується на мікросхемах MC34063 фірми Motorola. Застосування таких мікросхем дозволяє одержати необхідну напругу +5В и -5В при вхідній напрузі від 6В до 20В. Це важливо при живленні від батарей, тому що напруга батареї може значно мінятися в міру її розряду. При живленні від зовнішнього джерела застосування подібних мікросхем вигідно тим, що не потрібно високої точності джерела напруги.
Типова схема підключення MCP34063 показана на рис. 3.1.
Рисунок 3.1 - Схема підключення MCP34063 у режимі Step-Down
Крім того, застосування MC34063 дозволяє досить легко одержати інверсну напругу, необхідне для живлення операційного підсилювача. Типова схема такого підключення показана на рис .
Рисунок 3.2 - Схема включення MCP34063 у режимі Inverting
Зробимо розрахунок параметрів схеми.
Вхідні дані: бажана вихідна напруга Vout = 5B, мінімальна вхідна напруга Vin = 7B, мінімальна частота коливань Fmin = 200 кГц.
З [17] отримуємо Vsat = 1.5 В.
Відношення часів вмикання/вимикання:
 .
(3.2)
.
(3.2)
 мкс.
(3.3)
мкс.
(3.3)
Тоді з (3.2) та (3.3) час вимикання:
 мкс,
(3.4)
мкс,
(3.4)
![]() мкс.
(3.5)
мкс.
(3.5)
Значення ємності дорівнює:
![]() мкФ.
(3.6)
мкФ.
(3.6)
Значення індуктивності дорівнює:
 мкГн.
(3.7)
мкГн.
(3.7)
Аналогічні номінали елементів використовується і для схеми включення, що інвертує.
3.3 Розрахунок надійності схеми
Розрахунок надійності виконуємо з того припущення, що відмова хоча б одного елемента порушує працездатність всієї схеми.
Інтенсивність відмов схеми дорівнює сумі інтенсивностей відмов її компонентів. Інтенсивності відмови компонентів наведені в таблиці 3.3
.
Таблиця 3.3 – Інтенсивності відмов компонентів
|
Тип елемента |
Кількість елементів, шт. |
Інтенсивність відмов 10 -6 година -1 |
|
Інтегральні мікросхеми |
7 |
4 |
|
Конденсатори |
17 |
0,05 |
|
Резистори |
16 |
0,2 |
|
Діоди |
6 |
0,25 |
|
Світлодіодні індикатори |
2 |
1 |
|
Кварц |
2 |
16 |
|
Рознімачі |
2 |
0,062 |
|
Пайки |
238 |
0,01 |
Сумарна інтенсивність відмов:
![]()
![]() год-1.
(3.8)
год-1.
(3.8)
Тоді з (3.7) напрацювання на відмову
 год.
(3.9)
год.
(3.9)
3.4 Розрахунок часу автономної роботи виробу
Низьке енергоспоживання - це дуже важливий фактор для систем з автономним живленням. Тривалість часу роботи батарей безпосередньо пов'язана з енергоспоживанням.
Розрахуємо час автономної роботи виробу від одного лементу живлення типу „крона” ємністю 1200 мА/год.
Час автономної роботи розраховується як відношення ємності батареї до споживаного виробом струму за формулою:
 ,
(3.10)
,
(3.10)
де Сbat – ємність елементу живлення, I – струм, що споживається приладом.
Враховуючи (3.1), маємо:
 год.
(3.10)
год.
(3.10)
3.5 Розрахунок елементів кварцового генератора
Кварцовий генератор сконструйований для паралельного режиму роботи кварцового резонатора. Для правильної роботи кварцового генератора потрібні навантажувальні конденсатори. Значення навантажувальних конденсаторів залежать від навантажувальної ємності резонатора CL, обумовленою документацією на резонатор.
Загальна ємність конденсаторів підключених між виводами кварцового генератора повинна бути дорівнює навантажувальної ємності резонатора, і визначається за формулою (3.11). Паразитна ємність визначається ємністю виводів резонатора і ємністю друкованого монтажу. Звичайно загальне значення паразитної ємності дорівнює 3-5 пФ. Схема підключення кварцового резонатора й навантажувальних конденсаторів показана на рис. 3.3.
 ,
(3.11)
,
(3.11)
Приймемо C1 рівним C2, тоді з (3.11) отримаємо:
![]() ,
(3.12)
,
(3.12)
Рисунок 3.3 – Схема підключення кварцового резонатора
При необхідності підстроювання робочої частоти кварцового генератора паралельно C2 може бути підключений конденсатор, що підстроюється.
4 ЕКОНОМІЧНИЙ РОЗРАХУНОК
Основним завданням техніко-економічного обґрунтування (ТЕО) дипломного проекту є визначення величини економічного ефекту від використання в суспільному виробництві основних і супутніх результатів, одержуваних при рішенні поставленого технічного завдання в даному дипломному проекті.
У даному розділі приводиться технічно-економічне обґрунтування дипломної роботи - розрахунок собівартості науково-дослідної роботи (система дистанційного контролю акустичного оточення).
На основі даних, отриманих при розрахунку, можна буде зробити висновок про доцільність подальшого розгляду даної теми, її аналізу за допомогою ЕОМ і впровадження за даними оптимізації нових удосконалень.
4.1 Оцінка трудомісткості науково-дослідної роботи
Для визначення трудомісткості виконання науково-дослідної роботи насамперед складається перелік всіх основних етапів і видів робіт, які повинні бути виконані. Науково-дослідні роботи містять наступні етапи: розробку технічного завдання; вибір напрямку дослідження; теоретичні й експериментальні дослідження; узагальнення й оцінку. По кожному виді робіт визначається також кваліфікований рівень виконавців.
Трудомісткість виконання НДР визначається по сумі трудомісткості етапів і видів робіт, оцінюваних експертним шляхом у робочих днях, і носить імовірнісний характер, тому що залежить від безлічі факторів, що важко врахувати.
Таблиця 4.1 – Трудомісткість виконання НДР
|
Вид робіт |
Трудоміст-кість етапу, дн. |
Трудомісткість робіт виконавця, дн. |
Посада виконавця |
|
1 |
2 |
3 |
4 |
|
Розробка технічного завдання (ТЗ) |
|||
|
1. Зіставлення й затвердження ТЗ на НДР |
5 |
5 |
Старший науковий співробітник |
|
Вибір напрямку дослідження |
|||
|
1. Збір і вивчення науково-технічної літератури, нормативно-технічної документації й інших матеріалів, що відносяться до теми дослідження. |
20 |
20 |
Молодший науковий співробітник |
|
2. Складання аналітичного огляду стану питань по темі. |
10 |
10 |
Молодший науковий співробітник |
|
3. Формування напрямків рішення завдань, поставлених у ТЗ НДР й їхня оцінка. |
5 |
5 |
Молодший науковий співробітник |
|
Продовження таблиці 4.1 |
|||
|
1 |
2 |
3 |
4 |
|
4. Вибір й обґрунтування прийнятого напрямку проведення досліджень і способу рішення поставлених завдань. |
5 |
5 |
Молодший науковий співробітник |
|
5. Розробка загальної методики проведення досліджень. |
10 |
10 |
Молодший науковий співробітник |
|
Теоретичні дослідження |
|||
|
1. Розробка робочих гіпотез, побудова моделі об'єкта досліджень, обґрунтування допущень. |
20 |
20 |
Молодший науковий співробітник |
|
2. Виявлення необхідності проведення експериментів для підтвердження окремих положень теоретичних досліджень. |
5 |
5 |
Старший науковий співробітник |
|
3. Обробка отриманих даних. |
25 |
15 10 |
Молодший науковий співробітник, лаборант |
|
Продовження таблиці 4.1 |
|||
|
1 |
2 |
3 |
4 |
|
4. Коректування теоретичних моделей дослідження. |
15 |
15 |
Молодший науковий співробітник |
|
Узагальнення й оцінка результатів досліджень |
|||
|
1. Узагальнення результатів попередніх етапів роботи. Оцінка повноти рішення поставлених завдань. |
5 |
5 |
Старший науковий співробітник |
|
2. Розробка рекомендацій з використання результатів проведення НДР. |
5 |
5 |
Молодший науковий співробітник |
|
3. Формулювання вимог для ТЗ на наступні НДР й ДКР. |
5 |
5 |
Молодший науковий співробітник |
|
4. Складання й оформлення звіту. |
25 |
20 5 |
Молодший науковий співробітник, кресляр |
|
Розгляд результатів НДР і приймання роботи в цілому. |
10 |
10 |
Старший науковий співробітник |
|
Разом: |
170 |
||
|
Старший науковий співробітник Молодший науковий співробітник Лаборант Кресляр |
25 130 10 5 |
||
Загальна трудомісткість виконання даного НДР за даними в таблиці 3.1 дорівнює 170 дн.
Залежно від характеру й складності НДР, ступеня попередньої пропрацьованості питань держстандарт допускає виключення або доповнення етапів й окремих видів робіт, їхній поділ або сполучення, а також уточнення змісту.
Співвідношення трудових витрат по окремих етапах НДР й ДКР наведені в таблиці 4.2.
Таблиця 4.2 – Співвідношення трудових витрат
|
Етапи НДІ й ДКР |
Трудомісткість дослідницьких робіт, % |
|
Розробка технічного завдання |
4,64 |
|
Вибір напрямку дослідження |
42,86 |
|
Теоретичні й експериментальні дослідження |
40,12 |
|
Узагальнення й оцінка результатів дослідження |
12,38 |
4.2 Визначення планової собівартості проведення НДР
Науково-технічна продукція включає закінчені науково-дослідні, конструкторські, проектно-конструкторські, технологічні й інші інноваційні науково-технічні роботи (послуги), дослідні зразки й дослідні партії виробів, виготовлені в процесі виконання науково-дослідних і дослідно-конструкторських робіт відповідно до умов, передбаченими в договорі (замовлені) і прийняті замовником.
У собівартість науково технічної продукції включаються витрати, необхідні для виробництва продукції й виконання робіт, передбачених технічним завданням (програмою, методикою або аналогічним документом) і договором (замовленням) на створення (передачу) науково-технічної продукції.
Угруповання по статтях калькуляції повинна забезпечити виділення витрат, пов'язаних з виробництвом окремих видів науково-технічної продукції по конкретних договорах (замовленням), які можуть бути прямо включені в їхню собівартість.
Типове угруповання по статтях калькуляції включає:
матеріали;
витрати по роботах виконуваним сторонніми організаціями;
спеціальне устаткування для наукових (експериментальних) робіт;
витрати на оплату праці працівників, безпосередньо пов'язаних зі створенням науково-технічної продукції;
додаткові витрати на заробітну плату;
нарахування на заробітну плату;
інші прямі витрати;
накладні витрати.
Наукові організації, виходячи з необхідності точного визначення собівартості науково-технічної продукції по окремих договорах (замовленням), можуть передбачити виділення окремої статті витрати на утримання й експлуатацію науково-дослідного встаткування, установок і споруджень.
Калькуляція планової собівартості наведена в таблиці 4.
До статті «Матеріали» відносяться витрати на сировину, основні й допоміжні матеріали, покупні напівфабрикати й комплектуючі вироби, необхідні для виконання НДР. Витрати по цій статті визначаються по діючих оптових цінах з урахуванням транспортно-заготівельних витрат, величина яких становить 7-10% від оптової вартості матеріалів. Так для даного виду НДР потрібно тільки ЕОМ, то стаття «Матеріали» у витратах уважатися не буде, тому що ЕОМ відноситься до основних фондів й у статтю матеріали не попадає.
Амортизаційні відрахування, кошти на ремонт й електроенергію входять у накладні витрати й окремо не враховуються.
На статтю «Спецобладнання для наукових (експериментальних) робіт» відносяться витрати на придбання або виготовлення спеціальних приладів, стендів, апаратів й іншого спеціального устаткування, необхідного для проведення конкретної НДР. Визначення витрат за цією статтею провадиться по фактичній вартості придбання, тобто за договірною ціною з урахуванням транспортно-заготівельних витрат і витрат, пов'язаних з установкою й монтажем спеціального устаткування, величина яких звичайно становить 12-15% від договірної ціни встаткування. Витрати по даній статті зведені в таблицю 4.3.
Таблиця 4.3 – Витрати на спецобладнання
|
Спецобладнання |
Виготовлювач (постачальник) |
Кількість |
Ціна за одиницю, грн. |
Сума, Грн. |
Обґрун-тування |
|
Демонстраційний набір |
Bruel & Kjear |
1 |
6000 |
6000 |
Основний об'єкт НДР |
|
Транспортно- заготівельні роботи |
DHL |
1 |
300 |
300 |
Доставка |
|
Усього: |
6300 |
На статтю “Основна заробітна плата” ставиться основна заробітна плата наукових співробітників, інженерно-технічних працівників, лаборантів, креслярів, копірувальників і робітників, безпосередньо зайнятих виконанням НДР, а також заробітна плата позаштатного складу, залучених до її виконання. Для розрахунку візьмемо середню заробітну плату відповідних працівників Інституту кібернетики міста Києва. Середнє число робочих днів у місяці в 2005 році - 21 день. Суми основної зарплати співробітників, зайнятих на проведенні НДР наведені в таблиці 4.4.
Таблиця 4.4 – Основна заробітна плата працівників
|
Посада виконавця |
Середня ЗП на місяць, грн. |
Трудомісткість роботи виконавця, дн. |
Сума, грн. |
|
Старший науковий співробітник |
750 |
25 |
892,86 |
|
Молодший науковий співробітник |
450 |
130 |
2785,71 |
|
Лаборант |
290 |
10 |
138,1 |
|
Кресляр |
320 |
5 |
76,19 |
|
Усього |
170 |
3892,86 |
До статті “Додаткова заробітна плата” відносяться виплати, передбачені законодавством за непророблений час: оплата чергових і додаткових відпусток, оплата часу, пов'язаного з виконанням державних і суспільних обов'язків, виплати винагород за вислугу років й інших. Додаткова заробітна плата від основної заробітної плати розраховується з урахуванням всіх вихідних днів у році (104), свят (9), у підсумку одержуємо 252 робочих дня у році, оскільки відпустка становить 24 дня й 7 днів лікарняних, то додаткова заробітна плата складе 12% від основної заробітної плати: 3892,86* 0,12 = 467,14 грн..
Розмір відрахувань на нарахування на заробітну плату становить 38% від суми основної й додаткової заробітної плати працівників, що безпосередньо виконують НДР.
Вн.з/п = 0,38 * (467,14 + 3892,86) = 1656,8 грн. (4.1)
До статті “Накладні витрати” включаються витрати на керівництво й господарське обслуговування, які рівною мірою відносяться до всіх виконавців НДР. По цій статті враховується заробітна плата апарата керівництва й загальногосподарських служб, витрати на зміст і поточний ремонт будинків, споруджень, устаткування й інвентарю, амортизаційні відрахування на їхнє повне відновлення й капітальний ремонт, витрати по охороні праці, науково-технічної інформації, винахідництву й раціоналізації й так далі. У наукових установах величина накладних витрат становить 120 - 200% від основної й додаткової заробітної плати.
Інші прямі витрати, до яких ставляться витрати на придбання матеріалів спеціальної науково-технічної інформації, за використання телефонної й радіозв'язку, доступ до мережі Інтернет й інші витрати необхідні при проведенні конкретної НДР, увійдуть у накладні витрати.
Суми витрат по статтях і підсумковій собівартості НДР наведені в таблиці 4.5.
Таблиця 4.5 – Собівартість НДР
|
Стаття витрат |
Сума, грн. |
|
1. Спецобладнання для НДР |
6300 |
|
2. Основна заробітна плата |
3892,86 |
|
3. Додаткова заробітна плата |
467,14 |
|
4. Нарахування на заробітну плату |
1656,8 |
|
5. Накладні витрати |
8675,21 |
|
Планова собівартість: |
21000 |
5 ОХОРОНА ПРАЦІ
5.1 Аналіз небезпечних і шкідливих виробничих факторів на робочому місці оператора.
Система дистанційного контролю акустичного оточення керується та контролюються оператором ЕОМ, що розташований у звичайній кімнаті для працівників, або у спеціально відведеному для цього приміщенні підприємства.
На робочому місці оператора персонального комп'ютера присутні наступні шкідливі виробничі фактори:
Фізичні:
недостатня освітленість робочої зони;
пряма й відбита блискавичність;
підвищений рівень статичної електрики;
підвищений рівень електромагнітних випромінювань;
підвищений рівень шуму;
несприятливі параметри мікроклімату.
Психофізіологічні:
статичні фізичні перевантаження;
нервовопсихічні перевантаження:
розумова перенапруга;
перенапруга аналізаторів.
5.2 Фізично небезпечні й шкідливі фактори.
Недостатня освітленість робочої зони природним світлом виникає внаслідок недостатньої площі світлових прорізів, їхнього забруднення, а також нераціонального розташування робочого стола щодо джерел природного світла.
Недостатнє освітлення негативно впливає на зір людини, стан його центральної нервової системи, знижує продуктивність праці, збільшує стомлення працівника.
Для виконання зорової роботи, пов'язаної зі сприйняттям інформації з екрана, зовсім непридатний спосіб освітлення всього приміщення. Наявний досвід створення світлової обстановки при сприйнятті інформації з екрана свідчить про те, що найбільший обсяг інформації може бути сприйнятий в темряві. Однак при необхідності реєстрації цієї інформації, яскравість робочого місця, де відбувається ця реєстрація, створювана місцевим освітленням, повинна відповідати яскравості екрана (75-100 кд/м2). При цьому варто передбачити, щоб екран ЕПТ був захищений від прямого влучення на нього світла спеціальним щитом. При відсутності такого захисту й, отже, зменшенні контрасту зображення обсяг і точність сприйманої інформації може скоротитися на 30%.
Виконання зорової роботи при недостатньому освітленні може привести до розвитку деяких дефектів ока. Дефекти ока ділять на два основних види:
короткозорість;
далекозорість.
При організації раціонального виробничого освітлення варто уникати наявності в поле зору працюючих блисткостей. Порушення зорових функцій блисткістю називається сліпимістю. Чим вище яскравість поля адаптації, тим менше ймовірність явища сліпимості
В умовах даного проекту природне освітлення є неможливим, тому що це закрите приміщення, а використовується штучне. Недостатня освітленість знижує швидкість розрізнення деталей (іноді робить це взагалі неможливим), що позначається на продуктивності праці, збільшує стомлюваність працівника й т.д.
Внаслідок цього необхідна розробка штучного освітлення робочої зони оператора.
Пряма блискість - влучення в поле зору яскравих джерел світла.
Відбита блискість виникає через високий коефіцієнт відбиття екрана.
Блискість викликає сліпучий ефект. Від сліпучої дії світла спочатку найбільше всього погіршується контрастна чутливість ока, потім гострота зору.
Границею дискомфортності зорового відчуття є М=40, а при М=60 виникають хворобливі відчуття.
Підвищений рівень статичної електрики. Джерелами електростатичного поля на робочому місці оператора є дисплей і периферійні пристрої. Вплив статичної електрики на людину може проявлятися у вигляді слабкого довгостроково струму, що протікає, або у формі короткочасного розряду через його тіло. Такий розряд викликає в людини рефлекторний рух, що може привести до травм. Електростатичне поле підвищеної напруженості негативно впливає на організм людини, викликаючи функціональні зміни з боку центральної нервової, серцево-судинної й іншої систем організму. Для обмеження шкідливого впливу електростатичного поля проводиться його нормування.
Напруженість електромагнітного поля на відстані 50 см. навколо ВДТ по електричній складовій повинна бути не більше:
у діапазоні частот 5 Гц - 2 кГц; 25 В/м
у діапазоні частот 2 - 400 кГц 2,5 В/м
Щільність магнітного потоку повинна бути не більше:
у діапазоні частот 5 Гц - 2 кГц; 250 нТл
у діапазоні частот 2 - 400 кГц. 25 нТл
Поверхневий електростатичний потенціал не повинен перевищувати 500 В.
Підвищений рівень електромагнітних випромінювань. Основним джерелом електромагнітних полів на робочому місці оператора персонального комп'ютера є електронно-променева трубка дисплея.
Електромагнітні поля впливають на тканині людини як на біологічні об'єкти. Вони змінюють орієнтацію кліток або ланцюгів молекул відповідно до напрямку силових ліній електричного поля, послабляють біохімічну активність чистових молекул, порушують функції серцево-судинної системи, органів подиху, травлення й деяких біохімічних показників крові (змінюється співвідношення еритроцитів і лейкоцитів крові, виникає лейкоцитоз).
Електромагнітні поля несприятливо впливають на зір, викликають головний біль, порушення сну, зниження апетиту.
ЕПТ дисплея є джерелом електромагнітних випромінювань із частотами 10-16кгц.
Оператор персонального комп'ютера перебуває в ближній зоні (зона індукції), де ще не сформована електромагнітна хвиля, що біжить, тому цю зону можна характеризувати як електричною, так і магнітного складового електромагнітного поля.
Контроль рівнів електричного поля здійснюється за значенням напруженості електричного поля, вираженої в В/м.
Контроль рівнів магнітного поля здійснюється за значенням напруженості магнітного поля, вираженої в А/м або за значенням магнітної індукції, вираженої в Тл.
Підвищений рівень шуму. Джерелами шуму на робочому місці програміста є як самі ЕОМ, так і периферійне встаткування.
Шум - несприятливо діючі на людину звуки. Він є хаотичним сполученням звуків різної частоти й інтенсивності. Джерелом звуку в ЕОМ і периферійному встаткуванні є коливні тверді частини, до яких можна віднести системи вентиляції встаткування, дисководи, каретки й приводи принтерів. Так само джерелом високочастотних шумів може бути електронна частина ЕОМ і периферійного встаткування.
Тривалий вплив інтенсивного шуму може привести до патологічного стану слухового органа, до його стомлення й виникнення професійного захворювання - приглухуватості, тобто до втрати слуху. Шум викликає зміни у серцево-судинній системі, супроводжувані порушенням тонусу й ритму серцевих скорочень, змінюється артеріальний тиск, приводить до порушення нормальної функції шлунка. Особливо піддається впливу центральна нервова система. Відзначається зміна органів зору, вестибулярного апарата, збільшення внутрічерепного тиску, порушення обмінних процесів організму.
5.3 Психофізіологічно небезпечні й шкідливі фактори.
Статичні фізичні перевантаження. При роботі з ЕОМ застосовують клавішний ввід. Робочі цикли при роботі на клавішних апаратах, як правило, багаторазово повторюються. Велике їхнє число за робочу зміну приводить до нервово-м'язового стомлення, що може бути основним етиологічниим фактором м'язової перенапруги й виникнення професійних захворювань рук.
При статичних фізичних перевантаженнях ніг, плечей, шиї й рук довгостроково прибувають у стані скорочення. У них погіршується кровообіг. Живильні речовини надходять у м'язи недостатньо швидко, у тканинах накопичуються продукти розпаду, у результаті чого можуть виникнути хворобливі відчуття.
Оскільки кожне натискання на клавішу сполучене зі скороченням м'язів, сухожилля безупинно сковзають уздовж костей і стикаються із тканинами.
Внаслідок чого можуть виникнути запальні процеси. Розпухлі внаслідок повторюваних рухів, оболонки сухожиль можуть здавити нерв. Виникає зап'ястний синдром.
Нервовопсихічні перевантаження. Нервова перенапруга обумовлена напругою уваги. Часта й тривала перенапруга може служити джерелом ряду захворювань серцево-судинної, нервової, зорової й іншої систем організму.
Розумова перенапруга. Розумова діяльність - це діяльність, насамперед, центральної нервової системи, її вищого відділу кори головного мозку.
При розумовій роботі відбувається звуження судин кінцівок і розширення судин внутрішніх органів.
Низький рівень загального обміну при розумовій діяльності не є показником малої інтенсивності обмінних процесів, навпаки, споживання кисню збільшується в 15-20 разів у порівнянні з фізичною роботою. Можливі значні зміни кров'яного тиску, пульсу, підвищення цукру в крові. Тривала розумова робота може привести до серцево-судинних захворювань.
Перенапруга аналізаторів. Центральна нервова система одержує інформацію від зовнішнього середовища за допомогою чутливих апаратів, що сприймають сигнали. Ці апарати академіком И.П.Павловим названі аналізаторами.
Основна характеристика аналізаторів – висока чутливість. При роботі з дисплеєм, яскравість сигналів значно перевищує мінімальний рівень світлового впливу. Верхня межа інтенсивності світлового сигналу, при якому ще не порушується робота аналізаторів, становить 10.000 кд/м2. Але крайні значення стомлюючі для очей. Так ознакою ненормально великої яскравості зображення на сітківці є виникнення послідовних образів. Зорова система має властивість оцінювати сприйману яскравість сигналу.
Зорова робота вимагає частого перемикання з однієї поверхні на іншу, що відбувається на тлі нерівномірних яскравостей. Результати досліджень показують, що робота в умовах постійної переадаптації до яскравостей, що розрізняються приблизно в 10 разів, викликає почуття дискомфорту вже в перші години роботи, а потім й явну перевтому. Особливо несприятливі такі перепади яскравості, які викликають сліпучий ефект. Від сліпучої дії світла спочатку найбільше всього погіршується контрастна чутливість ока, а потім гострота зору. При незадовільному розподілі яскравості в освітленому просторі виникає відчуття зорового дискомфорту.
Дискомфортні умови для роботи ока можуть виникнути не тільки в результаті більших яскравостей у полі зору, але й внаслідок недостатньої освітленості поля зору. Психофізіологічні досвіди показали, що різна чутливість ока досягає максимуму при освітленості білої поверхні більше 200 лк і зберігає його аж до 3000 лк. Сталість гостроти зору протягом роботи (стійкість ясного бачення) досягає максимуму приблизно при освітленості білої поверхні більше 200 лк.
5.4 Міри захисту від небезпечних і шкідливих виробничих факторів.
Основним способом захисту від статичної електрики є заземлення периферійного встаткування, а також зволоження навколишнього повітря.
При відсутності природного освітлення використається штучне. Для загального освітлення використаються лампи денного світла, тому що їхній спектр близький до природного.
Зниження рівня шуму можна домогтися, застосовуючи демпфірування, звукоізоляцію, поглинання. Демпфірування - покриття поверхні демпферними матеріалами, що мають велике внутрішнє тертя (мастики, спеціальні види повсті, лінолеум). Звукоізоляція - зниження виробничого шуму на шляху його поширення. За допомогою звукових перегородок легко знизити рівень шуму на 30-40 дБ. Звукопоглинання - застосування звуковбирних матеріалів при обладнанні кімнати.
Для запобігання виникнення шкідливих наслідків від статичних фізичних перевантажень, необхідно обладнати місце так, щоб виключити незручні пози, тривалі напруги. Дисплей повинен бути встановлений на такій висоті й під таким кутом, щоб шия працівника не була зігнута й утримувалася в такому стані напруженими м'язами. Клавіатура повинна розташовуватися так, щоб до її не потрібно було тягтися, руки не повинні бути у висячому положенні або перенапружені. Не можна довго перебувати в одній позі. Щогодини протягом 15 хв. необхідно займатися якою-небудь справою, зробити розминку.
Для запобігання перенапруги аналізаторів необхідно визначити режим яскравості. Для цього потрібно встановити рівень яскравості, співвідношення рівнів яскравості в полі зору, рівень контрасту. Оптимальною вважається така яскравість, при якій проявляється контрастна чутливість ока, гострота зору й швидкість розрізнення сигналів. Нижньою комфортною границею рівня яскравості світних сигналів можна вважати 30 кд/м2, верхня комфортна границя визначається значенням сліпучої яскравості. Яскравість об'єктів на екрані повинна бути погоджена з яскравістю фону екрана й навколишнім освітленням. При зворотному контрасті контраст яскравості повинен перебувати в межах 85-90% з можливістю регулювання яскравості об'єктів, а при прямому контрасті 75-80% з можливістю регулювання яскравості фону. Прямий контраст переважніше зворотного. Оптимальне співвідношення яскравостей між екраном, його найближчим оточенням і далеким оточенням становить 5:2:1. Відстань зчитування інформації з екрана може бути від 400мм і більше.
5.5 Розрахунок виробничого освітлення
Недостатня освітленість робочої зони оператора, усувається введенням комбінованого штучного освітлення. Для розрахунку освітлення необхідно знати розміри приміщення. Для даного виду діяльності (дистанційний контроль виробничого процесу на екрані комп'ютера) може використовуватися, будь-яка доступна площа, як правило, це закрите приміщення без доступу світла. Для розрахунку візьмемо приміщення площею 10Ч3Ч3 (довжина А = 10 м, ширина В = 3 м, висота С = 3 м) з повною відсутністю природного освітлення.
Розрахуємо освітлення. Для організації освітлення робочих місць скористаємося світильниками з люмінесцентними лампами. Знайдемо висоту підвісу над робочою площиною Н. З рис. 5.1., представленого нижче, видно, що висота робочої площини (стола) над підлогою дорівнює 0,85 м. Отже, з огляду на відстань від стелі до світильника (0,15 м), відстань від робочої площини до світильника буде приблизно дорівнювати 2 м.
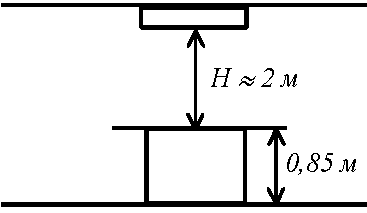
Рисунок 5.1 – Габарити приміщення
Знайдемо відстань між центрами світильників l. Для люмінесцентних світильників
![]() (5.1)
(5.1)
При такому значенні l можливо реалізувати тільки один ряд світильників уздовж довгої стіни.
Відстань світильників від стін дорівнює
![]() (5.2)
(5.2)
Кількість світильників визначається за формулою
 (5.3)
(5.3)
Розташування світильників умовно показане на рис. 5.2. Крапками позначені центри світильників.
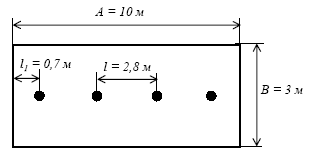
Рисунок 5.2 – Розташування світильників
Для знаходження необхідного світлового потоку одного джерела необхідно попередньо знайти деякі параметри.
Коефіцієнт запасу, що враховує старіння ламп і забруднення світильників, дорівнює
![]() ,
,
тому що в даному приміщенні виділення пилу низьке.
Площа освітлюваного приміщення
![]() (5.4)
(5.4)
Коефіцієнт мінімальної освітленості для люмінесцентних ламп
![]()
Визначимо індекс приміщення
 (5.5)
(5.5)
Коефіцієнт відбиття стелі (свіжа побілка)
![]()
Коефіцієнт відбиття стін (голубий колір)
![]()
Коефіцієнт відбиття підлоги (коричневий колір)
![]() .
.
З огляду на те, що застосовується світильник ЛСПО2, даним коефіцієнтам відбиття й індексу приміщення відповідає коефіцієнт використання світлового потоку
![]()
Знаючи тепер всі необхідні значення параметрів, обчислимо необхідний світловий потік одного джерела світла
 (5.7)
(5.7)
Найближча по світловому потоці лампа ЛБ80-4 (6220 лм), Відхилення світлового потоку цієї лампи від розрахованого становить -5,5 %. Відхилення повинне лежати в межах (-10% - +20%), по цьому критерію лампа підходить.
Електробезпечність
Для захисту від електротравм у приміщенні слід використовувати сховану, добре ізольовану електропроводку. Розподіл енергії здійснюється за допомогою розподільного щита з ізольованими кабелями і розетками, що виключають можливість короткого замикання. Розподільний щит має запобіжники, що спрацьовують при критичному режимі роботи. Персонал, що обслуговує ЕОМ, зобов'язаний пройти навчання безпечним методам роботи на робочому місці і перевірку знань правил техніки безпеки.
У мережі нейтраль джерела струму слід приєднати до заземлення за допомогою заземлюючого провідника . Цей заземлювач розташовується поблизу джерела живлення (в окремих випадках) біля стіни будинку, у якому він знаходиться. Ефективним заходом захисту в даному випадку є захисне занулення.
Захисне занулення - це навмисне електричне з'єднання з нульовим захисним провідником металевих неструмоведучих частин, що можуть виявитися під напругою (ГОСТ 12.1.009-76). Захисна дія занулення здійснюється тим, що при замиканні однієї з фаз на занулений корпус у колі цієї фази виникає струм короткого замикання, що впливає на струмовий захист (плавкий запобіжник, автомат), у результаті чого відбувається відключення аварійної ділянки від кола. Таким чином, занулення зменшує напругу дотику й обмежує час, протягом якого людина, торкнувшись до корпуса, може потрапити під дію напруги.
ГОСТ 12.1.038-82 установлює гранично припустимі рівні напруг дотику (В), і струмів (мА), що протікають через тіло людини, призначені для проектування способів і засобів захисту людей при взаємодії з електроустановками виробничого і побутового призначення постійного і змінного струму частотою 50 і 400 Гц.
На підставі ПУЭ-85 дане приміщення по ступені небезпеки поразки електричним струмом відноситься до класу приміщень без підвищеної небезпеки поразки електричним струмом, так як умови, що створюють підвищену небезпеку поразки електричним струмом ( вологість, струмоведучий пил, висока температура, можливість одночасного торкання до струмоведучих частин і заземлення) відсутні .
Електропроводка в приміщенні схованого типу, тому випадкове торкання проводів з напругою 220 В виключено, за умови дотримання правил техніки безпеки. Вимикачі штучного освітлення ізольовані струмонепровідним облицюванням.
Поразка електричним струмом може відбутися в результаті несправних розеток і вилок ЕОМ, а також пристроїв місцевого освітлення, короткого замикання.
5.7 Пожежна безпека
При гасінні пожеж найбільше поширення одержали наступні принципи припинення горіння:
ізоляція вогнища горіння від повітря чи зниження шляхом розведення повітря непальними газами концентрації кисню до значення, при якому не може відбуватися горіння;
охолодження вогнища горіння нижче визначених температур;
інтенсивне гальмування швидкості хімічної реакції в полум'ї;
механічний зрив полум'я в результаті впливу на нього сильного струменя газу чи води;
створення умов вогнеперешкодження, тобто таких умов, при яких полум'я поширюється через вузькі канали
Приміщення, де виробляється монтаж друкованих плат відноситься по пожежній безпеці до категорії В по ОНТП 24-86 і зоні П-I по ПУЭ.
Категорія В – пожежнонебезпечні; до цієї категорії відносяться приміщення, у яких застосовуються рідини з температурою спалаху вище 61ОС і горючі пили чи волокна, нижня межа запалення яких більш 65 г/м3, тверді спаленні речовини і матеріали, здатні тільки горіти, але не вибухати при контакті з повітрям, чи водою один з одним.
Пожежа при монтажі може виникнути в результаті короткого замикання. Джерелами запалювання можуть стати джерела місцевого освітлення, а також розігрітий паяльник у результаті наявності пальних речовин, таких як спиртобензинова суміш, ацетон. Причини виникнення пожежі наступні:
порушення режимних вимог;
несправність і неправильна експлуатація електропаяльників і пристроїв місцевого освітлення;
порушення працюючими технологічних інструкцій.
Весь обслуговуючий персонал проходить періодичний інструктаж з техніки безпеки. На випадок пожежі в приміщенні обов'язкова наявність запасних евакуаційних виходів. У таких приміщеннях не можна застосовувати для гасіння пожежі воду, так як вода має значну електропровідність. У цьому випадку застосовують вуглекислі вогнегасники ОУ-8. У якості пожежних сповіщателів використовуються теплові (ДТЛ, ДПС-ОЗ8 і ін.). для оповіщення про пожежу в приміщенні мається телефон загального користування і табличка з номерами телефонів.
У коридорі установлюється внутрішній пожежний кран для гасіння пожежі за допомогою води.
5.8 Висновки
У даному розділі дипломної роботи проведений аналіз необхідних умов для роботи оператора, і фактори, що діють на нього в процесі роботи при максимально невідповідних умовах праці, а також рекомендації до усунення або зменшення небезпечних і шкідливих виробничих факторів. Приводяться рекомендації зі зменшення пожежонебезпеки приміщення.
Даний вид діяльності оператора (відео спостереження) є досить розповсюдженим і використається досить часто в багатьох сферах обслуговування, і тому не передбачає якихось конкретних умов на вибір і використання приміщення.
ВИСНОВКИ
У рамках даної роботи був розроблений цифровий аналізатор акустичних сигналів, або шумомір. Ця розробка має дуже велике значення, тому що в Україні немає аналогів запропонованому пристрою. Ті шумоміри, які застосовуються в нас на сьогоднішній день або імпортні, а тому дуже дорогі, або вітчизняного виробництва, і, відповідно, безнадійно застарілі.
Основний упор у роботі робився на універсальність та зниження вартості кінцевого продукту. Саме тому для індикації були обрані світлодіодні індикатори, а не рідинокристалічні, застосований убудований у мікроконтролер АЦП, а не зовнішній.
Розроблений пристрій може застосовуватись для вимірювання рівня шуму на підприємствах з метою попередження негативного впливу шуму на організм людини, для неперервного акустичного контролю приміщення у режимі інтелектуального датчика, а також може використовуватись працівниками міліції та органів Внутрішніх справ з метою фіксування порушень норм щодо максимально припустимого рівня шуму, що визначається відповідними законодавчими актами [5].
ЛІТЕРАТУРА
ГОСТ 17187-71. Шумомеры. Общие технические требования и методы испытаний.
Енс Трампе Брох. Применение измерительных систем фирмы «Брюль и Къер» для измерений акустического шума, Дания, 1971 г. – 224 с.
Дідковський В.С., Маркелов П.О. Шум і вібрація: Підручник. – К.: Вища школа., 1995. – 263с.
Дідковський В.С., Якименко В.Я., Запорожець О.І., Савін В.Г., Токарев В.І. Основи акустичної екології: Навчальний посібник.
Зельднн Е.А. Децибелы. Изд. 2-е, доп. М., «Энергия», 1977г. 64с. с ил.
http://kilm.by.ru/im/inter/rs485/index.html. RS-485 для чайников. Описание RS-485 на русском,.
http://rada.gov.ua. Закон України «Про внесення змін до деяких законодавчих актів щодо захисту населенні від впливу шуму» від 03.06.2004,
http://rada.gov.ua. «Санитарные нормы допустимого шума в помещениях жилых и общественных зданий и на территории жилой застройки» от 03.08.1984.
http://www1.rql.net.ua/library/16/3.htm. Интерфейсы модемов.
http://www.ciklon.ru/pribor/prod.htm.
http://www.gaw.ru/html.cgi/txt/interface/rs232/index.htm. Правильная разводка сетей RS-232.
http://www.microchip.com. Bonnie C. Baker, «Comparing Digital Potentiometers to Mechanical Potentiometers», - 6 с.
http://www.microchip.com. Microchip Technology, Inc., «Single/Dual potentiometers with SPI interface», - 36 с
http://www.microchip.com. Microchip Technology, Inc., «PIC18FXX8 datasheet», - 380 с.
http://www.microchip.com. Microchip Technology, Inc., «PIC16F87X datasheet», - 218 с.
http://www.motorola.com. Motorola, «MC34063A/MC33063A datasheet», - 12 с.
http://www.onsemi.com. Jade Alberkrack, «Theory and Applications of the MC34063 Switching Regulator Control Circuits», - 40 с.
http://www.rosteh.ru/production.shtml
Технічне завдання
1. Найменування й область застосування проектованого пристрою.
Найменування розробки: система дистанційного контролю акустичного оточення.
2. Підстава для розробки.
Робота проводиться на підставі завдання на дипломне проектування відповідно до наказу по інституту № від
3. Мета і призначення розробки.
Метою розробки є проектування універсальної системи для аналізу акустичного оточення, оволодіння методикою проектування електронної апаратури і правилами оформлення технічної документації.
4. Технічні вимоги.
Пристрій має забезпечувати вимірювання у другому класі (технічні вимірювання), має відображати значення виміру і режим роботи на індикаторі.
Пристрій має працювати у автономному режимі і у режимі інтелектуального датчика.
Пристрій повинен мати можливість заміни програмного забезпечення за допомогою ЕОМ.
Живлення пристрою має здійснюватись від елементу живлення „крона” або по дроту у режимі інтелектуального датчика.
Діапазон частот не вуже 20...8000 Гц.
Максимальна відстань від приладу до ЕОМ 1200 м.
Максимальна кількість приладів, під'єднаних до мережі - 32.
Погрішність вимірювання не більше ±1 дБ.
Динамічний діапазон вимірювання 20 дБ – 120 дБ.
Напруга живлення 6 – 20 В.
Діапазон температур 10 оС – 50 оС.
5. Вимоги до технологічності.
Пристрій повинен бути виконаний на елементній базі широкого застосування і містити мінімум спеціалізованих елементів. Можливе використання закордонної елементної бази. Конструкція пристрою повинна передбачати можливість багаторазової заміни елементів і забезпечувати високу механічну міцність друкованого монтажу.
6. Вимоги до рівня уніфікації.
У розроблювальній конструкції необхідно прагнути до максимального використання стандартних компонентів і уніфікованих виробів, а також запозичених складальних одиниць і деталей.
7. Вимоги до безпеки.
Розроблений пристрій повинен відповідати вимогам ДСТ 12.2.006 і забезпечувати електробезпечність, пожежобезпечність та інші вимоги при монтажі, експлуатації, обслуговуванні і ремонті.
8. Економічні показники.
Розроблювальний пристрій повинен бути ефективний з економічної точки зору. Схемні рішення повинні мати мінімальну вартість при реалізації.
9. Стадії й етапи розробки.
Розробка виконується в один етап. Початок розробки – Закінчення розробки.