| Скачать .docx |
Дипломная работа: Дипломная работа: Захоплення на базі екскаватора одноковшового
Зміст
1. Техніко-економічне обгрунтування
1.1.1 Робоче устаткування екскаватора
1.1.2 Робоче устаткування гідравлічного екскаватора
1.1.3 Робоче устаткування гідравлічного екскаватора
1.1.4 Робоче устаткування гідравлічного екскаватора
1.1.5 Робоче устаткування гідравлічного екскаватора
1.1.7 Пристрої для виконання земляних і навантажувально-розвантажувальних робіт
2. Опис конструкції машини і технології виробництва робіт
3. Розрахунок екскаватора ео-4321 з робочим устаткуванням затискач
3.2 Механізм повороту затискач
3.3 Розрахунок зусиль в робочому устаткуванні
3.3.1 Розрахунок зусиль в гідроциліндрі робочого устаткування
3.3.2 Визначення зусиль в поворотному механізмі
3.4 Розрахунок елементів робочого устаткування на міцність
3.4.1 Розрахунок осі повороту рухомого ножа
4. Об'ємний гідропривід екскаватора
4.1 Опис гідросистеми екскаватора
4.2 Розрахунок гідроциліндра ножа
5.1 Небезпечні і шкідливі виробничі чинники, супроводжуючі роботу машиніста екскаватора
5.2.2 Попадання людини в зону роботи
5.3.3. Запорошена. Методи очищення повітря від пилу
5.4 Віддзеркалення питань ергономіки при розробці робочого місця машиніста екскаватора
6. Розрахунок річного економічного ефекту
6.1 Виявлення призначення і області застосування нової техніки
6.3 Виявлення конструктивне - експлуатаційних особливостей техніки
6.4.1 Ідентифікатори для опису початкової інформації до програми «Ефект - М»
6.4.2 Ідентифікатори для опису розрахункових величин
6.4.3 Блок - схема програми «Еффект - М»
Список використаної літератури
Вступ
На даний час в будівельній сфері України склалася ситуація, коли ріст міст, будуються нові будинки і споруди. Однак в центрах міст знаходяться старі будинки, котрі необхідно або відновлювати, або руйнувати для очищення ділянок під нові споруди. Для таких робіт існує багато обладнання: стіноломні машини, гідравлічні молоти, крани, навантажувачі, екскаватори. Але для того, щоб зруйнувати будівлю необхідно декілька видів машин, наприклад: стіноламниі машини з навантажувачем або краном, екскаватор в зв'язку з самоскидами і ручна праця - стропальники. Наявність людей в робочій зоні приводить до частих випадків травматизму. Таким чином, на даний момент виникла задача створення нового робочого устаткування, яке зможе виконувати функції декількох машин, а також працювати в обмежених умовах, що дуже важливо для ведення робіт в зонах зруйнованих будівель, де важко робити маніпуляції працюючою технікою. В даний момент такого устаткування не існує, тому метою дипломного проекту є проектування робочого устаткування для відновних робіт на базі гідравлічного екскаватора ЕО-4321. Цим устаткуванням є затискач.
Цей затискач є змінним устаткуванням для екскаватора ЕО-4321. Для нього виконується розрахунок гідроприводу, річного економічного ефекту, а також надається увага питанню ергономіки.
Затискач повиннен виконувати наступні види робіт: розчищання завалів будівель, як нижчі стоянки екскаватора, так і на рівні; руйнування бетонних і цегляних споруд з подальшим завантаженням частин будівель в транспортний засіб; маніпулювання вантажем.Всі перераховані види робіт дозволяють підвищити продуктивність, зменшити час ручної праці, понизити витрату горючий змащувальних матеріалів і т.п.
Ці показники дають всі підстави для упровадження такого робочого устаткування в будівництві.
1. Техніко-економічне обгрунтування
1.1 Патентний огляд
Прискорення технічного прогресу і зростання продуктивності праці в будівництві значною мірою залежать від рівня механізації будівельного виробництва. В даний час в Україні ведеться робота по наступних основних напрямах: розробка парку машин, що забезпечують підвищення потужності (за рахунок упровадження нових двигунів і гідрообладнання високого тиску); продуктивності (за рахунок використовування одного робочого органу в десятках необхідних операцій на будівельному майданчику); розвиток виробництва спеціальної техніки, що забезпечує швидкісне будівництво; підвищення технічного рівня і ефективності машин і оснащення їх системами автоматизації управління із застосуванням мікропроцесорної техніки, розробки будівельних маніпуляторів і роботизованих пристроїв, що забезпечують підвищення якості і безпеки робіт, зниження енерговитрат, поліпшення економічних показників і скорочення кількості обслуговуючого персоналу. Сучасне місто вимагає малогабаритної, маневреної, могутньої техніки. Проте нинішній економічний стан України не дозволяє випускати абсолютно нову техніку і робоче устаткування до неї. У зв'язку з цим багато машинобудівних заводів проводять модернізацію існуючих машин. Нижче приведений патентний огляд дозволяє прослідити тенденції розвитку навісного устаткування до екскаваторів і визначити всі його плюси і мінуси.
1.1.1 Робоче устаткування екскаватора
Авторське свідоцтво СРСР N2 624993.
Автори: В.В. Мелашич, О.І. Мелашич і А.Б. Семенкин.
Винахід відноситься до області землерийних машин, підвищує надійність і спрощує конструкцію.
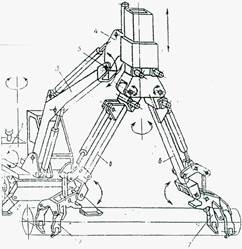
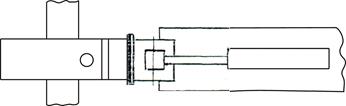
Робоче устаткування включає стрілу 1 з, рукояттю 2, на якій закріплене веделковий затискач (В3), гідроциліндри (ГЦ) управління стрілою і рукояттю і механізм повороту В3. Розміщений механізм повороту В3 в порожнині рукояті 2 і виконаний у вигляді втулок 7 і 10. Втулка 7 (внутрішня) розташована у втулці 10, сполучена з нею за допомогою гвинтової нарізки 8 і жорстко пов'язана з В3. Зовнішня втулка 10 має жорстко пов'язаний з нею поршень 11 ГЦ 12. Встановлена втулка 10 з можливістю переміщення у вертикальних направляючих 13, розміщених усередині рукояті 2. Другий поршень 14 ГЦ 12 встановлений на штоку 15., сполученим шарнірно з важелями ВЗ. Шток 15 розташований співісний з втулками 7 і 10. При переміщенні поршнів 11 і 14 ГЦ 12 досягається розкриття і закриття В3, його поворот і орієнтація у момент завантаження вантажу. (рис.1.1).
Винахід відноситься до землерийних машин і призначене для удосконалення конструкцій змінних робочих органів універсальних одноковшових гідравлічних екскаваторів.
Мета винаходу – підвищення надійності і спрощення конструкції (рис.1.2).
Екскаваторне устаткування працює таким чином.
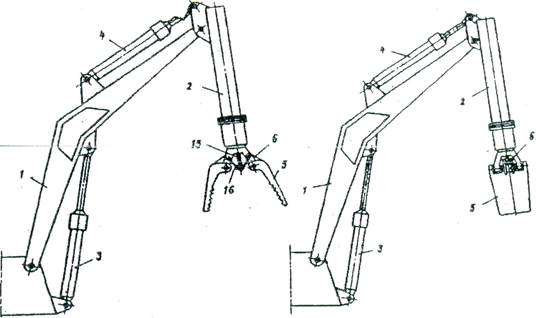
За допомогою стріли 1 і рукояті 2, керованих відповідно гідроциліндрами 3 і 4, веделковий затискач 5 переміщається у бік розташування вантажу, що підлягає транспортуванню. Потім за допомогою робочої рідини в порожнину гідроциліндра 12 над поршнем 14 здійснюється висунення штока 15 і за допомогою важелів 6 досягається розкриття веделкового затискача 5 (рис . 1.4). При подачі робочої рідини в порожнину гідроциліндра 12 під поршнем 14 досягається реверсування штока 15 (рис.1.3) і стулення веделкового захвата 5. При подачі робочої рідини в порожнину гідроциліндра 12 над поршнем 11 здійснюється переміщення втулки 10 у вертикальних направляючих 13, а також поворот втулки 7, оскільки втулка 7 сполучена з втулкою 10 за допомогою гвинтової нарізки 8. Втулка 7 обертається на підшипниках 9 і разом з нею повертається веделковий затискач 5. При подачі робочої рідини в порожнину гідроциліндра 12 під поршнем 11 здійснюється зміна напрямку обертання веделкового затискача 5.
Таким чином, забезпечуючи переміщення поршнів 11 і 14 гідроциліндра 12, досягається розкриття і закриття веделкового затискача 5, а також його поворот і орієнтація у момент схоплювання вантажу.
Формула винаходу.
Робоче устаткування екскаватора, включаюче шарнірно зчленовані стрілу і рукоять, веделковий затискач з важелями, гідроциліндри управління стрілою і рукояттю, механізм повороту веделкового затискача, розміщений в порожнині рукояті, і гідроциліндр, пов'язаний з веделковим затискачем, відрізняється тим, що, за допомогою підвищення надійності і спрощення конструкції, механізм повороту веделкового затискача виконаний у вигляді двох втулок, розміщених одна в іншій і зв'язаних між собою за допомогою вирізки, при цьому внутрішня втулка жорстко пов'язана з веделковим затискачем, а зовнішня має жорстко пов'язаний з нею поршень, закріплений на штоку гідроциліндра, пов'язаного з важелями веделкового затискачу, і встановлена з можливістю переміщення у вертикальних направляючих, закріплених усередині рукояті, при цьому шток гідроциліндра встановлений співісний з втулками.
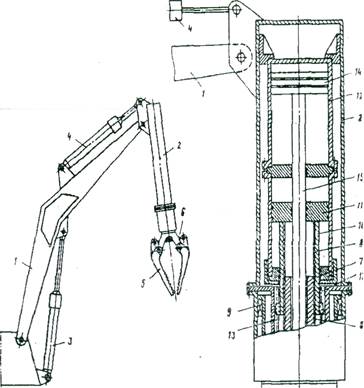
| Рис.1.1 Робоче обладнання екскаватора, загальній вигляд. |
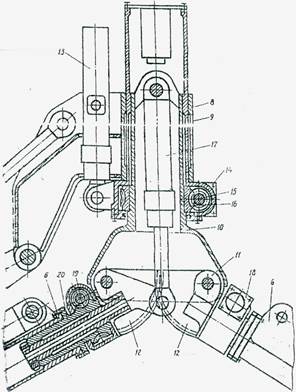
Рис.1.2 Шток гідроциліндра втягнутий і витягнутий один поршень. |
| Рис.1.3. Екскаваторне робоче устаткування в мить, коли затискач веделковий розкритий. |
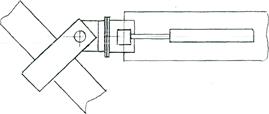
Рис.1.4. Екскаваторне робоче устаткування в мить, коли веделковий затискач повернений на 90°. |
1.1.2 Робоче устаткування гідравлічного екскаватора
Авторське свідоцтво СРСР NQ827б95.
Автори: В.И. Баловнев, Л.А. Хмара, А.И. Голубченко, і Б.Р. Заславській.
Винахід відноситься до землерийних машин, а саме до одноковшових гідравлічних екскаваторів, і призначено для вдосконалення їх робочого устаткування.
Метою винаходу є розширення технологічних можливостей робочого устаткування гідравлічного екскаватора.
Робоче устаткування гідравлічного екскаватора включає ківш, що складається з передньої щелепи l, оснащеною ріжучою кромкою 2 у вигляді зубів і за допомогою шарніра 3 сполучений із задньою щелепою 4, а також оснащений ріжучою кромкою 5, виконаної прямолінійної.
Рукоять виконана з основою у вигляді рукояті 6 традиційної конструкції і з фіксовано посадженим на оголовок 9 основи змінним модулем 10, у вигляді порожнистого корпусу. Задня щелепа 4 за допомогою двушарнірної вставки 11 з взаємно перпендикулярними осями шарнірів сполучена з модулем 10 і за допомогою універсальних шарнірів 12 і 13, тяга 14 і важеля 15 двузвенника пов'язана з штоком гидроцилиндра16поворота. На двошарнірної вставці 11 жорстко закріплений важіль 17, який шарнірно сполучений з штоком гідроциліндра 18 допомогою гідроциліндра 22.
Крім того, внутрішня поверхня модуля 10, виконаного у вигляді порожнистого корпусу, еквідістанта зовнішньої поверхні оголовка 9 основи.
Робоче устаткування гідравлічного екскаватора працює таким чином. При виконанні екскаваціонних робіт обидві щелепи 1 і 4 за допомогою гідроциліндра 22 зімкнуті і під дією гідроциліндром 16 і передаваного через важіль двохзвенника з тягою 14 повертається щодо нижньої осі двох шарнірної вставки 11 здійснюючи процес копання. При виконанні навантажувально-розвантажувальних робіт з сипкими матеріалами робоче устаткування може працювати як грейфера, здійснюючи затискач матеріалу обома щелепами 1 і 4 (Рис.1.5) .Кроме того, таке устаткування дозволяє витягувати в процесі копання, що трапляються на шляху каміння, коріння, а також виконувати навантажувально-розвантажувальні і монтажні операції з штучними вантажами.
Двушарнірная вставка 11 дозволяє, здійснює поворот ковша робочого устаткування екскаватора. Для цього включається в роботу гідроциліндр 18 і зусилля, що розвивається їм, передається на важіль 17, що приводить до повороту двошарнірної вставки 11 щодо рукоятки 6 із змінним модулем 10,а умітати з нею повертається і ківш. У місці із задньою щелепою 4 повертається завдяки наявності універсальних шарнірів 12 і 13 тяга 14, чим забезпечується незмінне положення гідроциліндра 16.
Поворот ковша за рахунок двошарнірної вставки 11 і гідроциліндра 18 дозволяє встановлювати у вертикальне положення різні довгомірні елементи.
Запропонована конструкція робочого устаткування дозволяє з якнайменшою трудомісткістю виробити монтаж робочого органу багатоцільового призначення. Для цього рукоять би заводиться у внутрішню порожнину модуля 10 і кріпиться там за допомогою пальців 7 і притискних гвинтів 8. Демонтаж виробляється в зворотній послідовності і рукоять 6 виходить готовою до навішування будь-яких змінних органів призначених для універсальних гідравлічних екскаваторів.
Формула винаходу.
Робоче устаткування гідравлічного екскаватора по авт. св. № 827695 відрізняється тим, що, з метою розширення його технологічних можливостей, рукоять виконана з основою у вигляді рукояті традиційної конструкції і з фіксовано посадженим на оголовок основи змінним модулем у вигляді порожнистого корпусу, внутрішня поверхня якого еквівалентна зовнішній поверхні оголовка основи, при цьому провушини рукояті для з'єднання з нею двох шарнірної вставки, важіль-тягового двохзвенника і гідроциліндра повороту вставки закріплені на модулі.
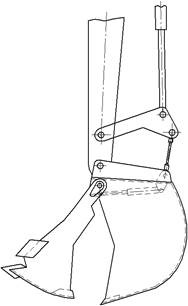
Рис. 1.5 Робоче устаткування з двохщелепним ковшом, змонтованим на рукояті.
1.1.3 Робоче устаткування гідравлічного екскаватора
Авторське свідоцтво США № 23767070.
Автори: Л.А. Хмара, В.И. Баловнев, А.И. Голубченко, і В.В
Робоче устаткування включає задню щелепу 1, укріплену на рукоятці 2 за допомогою шарніра 3 і зв'язану за допомогою важеля 4 і тяга 5 гідроциліндром 6 управління. Задня щелепа 1 сполучена шарнірами 7 з передньою щелепою 8, на якій за допомогою шарнірів 9 змонтована додаткова щелепа 10. Щелепи управляються гідроциліндрами 11 і 12 управління. Ріжучі кромки 13 - 16 щелеп виконані прямолінійними, а середня ріжуча кромка додаткової щелепи 10 виконана у вигляді зубів 17.
Робоче устаткування гідравлічного екскаватора виконує екскаваціонні роботи зворотною лопатою, виконує грейферні, вантажні роботи з сипкими і штучними матеріалами, виробляє монтажні роботи.
Копання грунту зворотною лопатою робоче устаткування може виробляти ковшом з трьома різними геометричними місткостями.
Розробка грунту ковшом з якнайменшою місткістю здійснюється задньою щелепою 1, шляхом повороту її гідроциліндром 6 навколо шарніра 3 при піднятій у верхнє крайнє положення додатковій середній щелепі 8 з приткнутою до неї передньою щелепою 10.
Ківш зворотної лопати з середньою геометричною місткістю утворюється стуленням гідроциліндром 12 задньої 1 і додаткової середньої 8 щелеп і перекладом передньої щелепи 1 Про гідроциліндром 11 у верхнє крайнє положення. Поворот зімкнутих щелеп при копанні грунту здійснюється гідроциліндром 6.
За рахунок стулення гідроциліндрами 11 і 12 задньої 1, додаткової середньої 8 і передньої щелеп утворюється ківш зворотної лопати з повною, найбільшою геометричною місткістю (рис.1.6.).
Виконання грейферних робіт робочим устаткуванням може здійснюватися по трьох варіантах.
Перший варіант (рис.1.7) передбачає виконання грейферних робіт стуленням задньої щелепи 1 і зімкнутих разом додатковою середньою 8 і передньої 10 щелеп.
По другому варіанту грейферні роботи виконуються шляхом стулення передньої щелепи 10 і зімкнутих разом додатковою середньою 8 і задньої 1 щелеп.
Також, копання в режимі грейфера може здійснюватися послідовно щелепами 1,8 і 10. Для цього штоки гідроциліндрів 11 і 12 висуваються в свої крайні положення, відводячи щелепи 1, 8 і 10 на максимальні кути один від одного. Далі гідроциліндром 6 і переміщенням рукоятки 2 здійснюється заглиблення додатково середньої щелепи 8 в переміщуваний матеріал. Процес забору грунту здійснюється поворотом за допомогою гідроциліндра 11 спочатку 8, а потім сумісним їх поворотом гідроциліндром 12 до стулення із задньою щелепою 1. Даний варіант виконання грейферних робіт доцільно виробляти з сипкими вантажами (пісок, шлак, щебінь). Він дозволяє більш повно заповнити об'єм ковша переміщуваним матеріалом і тим самим підвищити продуктивність екскаватора. Можливість виконання різних варіантів грейферних робіт забезпечує кращу адаптацію робочого устаткування до грунтових умов (формі грунтової поверхні, густині матеріалу і т. д.).
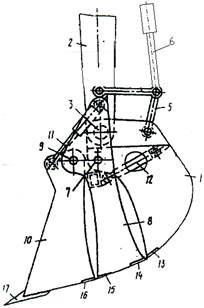
Рис. 1.6 Робоче устаткування гідравлічного екскаватора.
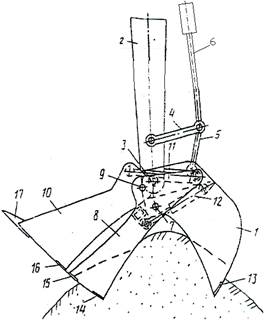
Рис. 1.7 Виконання грейферних робіт задньою щелепою, додатково і передньою щелепою.
Планувальні і зачистні роботи можуть виконуватися прямолінійними ріжучими кромками 13-16 задньої 1 додаткової середньої 8 і передньої 10 щелеп. Управління робочим устаткуванням при планувальних роботах здійснюється гідроциліндрами 6, 11 і 12. Вибір ріжучих кромок 13-16, що беруть участь в плануванні грунтової поверхні, виробляється комбінуванням положень щелеп 1, 8 і 10 за допомогою гідроциліндрів 11 і 12.
Затискач штучних вантажів для їх переміщення здійснюється між передньою 10 і додатковою середньою 8 і задньою 1 щелепами, а також послідовно між щелепами 1 і 8, 10.
Формула винаходу.
Робоче устаткування гідравлічного екскаватора, включаюче рукоять з шарнірно приєднаним до неї двохщелепним ковшом, гідроциліндри управління робочим устаткуванням, відмінне тим, що з метою підвищення продуктивності при роботі в грейферномуу режимі і забезпечення багатозахватності ковша при роботі з штучними вантажами, передня щелепа ковша виконана з двома додатковими провушинами на кожній бічній стінці і забезпечена фронтальною додатковою щелепою з провушинами і шарнірно приєднаними до неї гідроциліндрами, причому додаткова фронтальна щелепа провушинам до двох симетричним провушинам на протилежних бічних стінках передньої щелепи, а вільні кінці гідроциліндрів додаткової фронтальної щелепи приєднані шарнірно до інших симетричних провушинам передній щелепі.
1.1.4 Робоче устаткування гідравлічного екскаватора
Авторське свідоцтво СРСР N2 1154410.
Автори: А.С. Безбоков, Ю.П. Евсєєв, В.В. Шмельов, В.М. Непомящий і А.Б. Горячев.
Мета винаходу - підвищення експлуатаційних можливостей робочого устаткування, що складається з рукояті 1, основного 2 і додаткових вузьких 3 ковшів (К). При цьому К3 встановлений перед К2 і пов'язаний з вузлом стопоріння в неробочому положенні, виконаним виді гідроциліндра (ГЦ) 12, а шарніром 14 - з однією з бічних стінок К3. За допомогою шарнірного чотирьохланника 10 К2 сполучений з штоком ГЦ 11 управління. Ріжуча кромка 6 К3 має більший радіус копання, ніж ріжуча кромка 9 К2. У задній стінці К3 є вікно. Уривку основної траншеї виробляють К2. Після її уривки К3 опускають ГЦ 12 з верхнього неробочого положення до зіткнення з К2. Днище К3 стає продовженням днища К2. За допомогою К3 на дні основної траншеї утворюється дренажна. Грунт через вікно К3 потрапляє у внутрішню порожнину К2.
Винахід відноситься до будівельних дорожніх і гірських машин, а саме до робочого устаткування гідравлічних екскаваторів, і може бути використано переважно для уривки дренажної траншеї при одночасній розробці основній.
Метою винаходу є підвищення експлуатаційних можливостей робочого устаткування.
Робоче устаткування гідравлічного екскаватора (Рис.1.8) складається з рукояті 1, основного і додаткового вузького 3 ковшів. Додатковий ківш 3 має бічні стінки 4, днище 5 і ріжучу кромку б і змонтований перед основним ковшом 2 за допомогою загального шарніра 7 .В додатковому ковші 3 є вікно 8. Основний ківш 2 оснащений ріжучою кромкою 9 у вигляді зубів і сполучений за допомогою шарнірного чотирьохланника 10 з штоком гідроциліндра 11 управління, іншим кінцем змонтованого на рукояті 1. Додатковий ківш 3 пов'язаний з виконаним у вигляді гідроциліндра 12 вузлом стопоріннія його в неробочому положенні. Гідроциліндр 12 сполучений шарніром 13 з рукояттю 1, а шарніром 14 – з однією з бічних стінок 4 додаткові ковши 3.
Робоче устаткування працює таким чином.
При виконанні екскаваторних робіт після уривка основної траншеї додатковий ківш 3 піднімають в неробоче верхнє положення за допомогою гідроциліндра 12. Уривку основної траншеї виробляють основним ковшом 2. Після закінчення уривки ділянки основної траншеї додатковий ківш 3 з верхнього положення гідроциліндром 12 опускають до зіткнення з основним ковшом 2, при цьому днищі 5 додаткового ковша 3 стає продовженням днища основного ковша 2. Потім при копанні додатковий ківш 3 утворює дренажну траншею на дні основної. Грунт через вікно 8 додаткового ковша 3 потрапляє у внутрішню порожнину основного ковша 2.
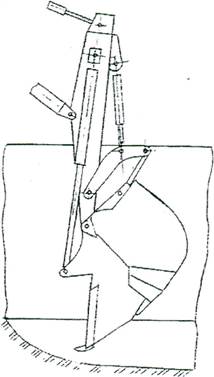
Рис. 1.8 Робоче устаткування гідравлічного екскаватора.
Формула винаходу
Робоче устаткування гідравлічного екскаватора, включаюче рукоять, ківш, що послідовно встановлений з ним на загальному шарнірі і має вікно в задній стеку додатковий вузький ківш, вузол стопоріння, одного з ковшів в неробочому положенні, одним кінцем змонтований на рукояті, і гідроциліндр управління, зв'язаний відмінне тим, що, з метою підвищення його експлуатаційних можливостей, додатковий ківш встановлений перед основним ковшом і пов'язаний з вузлом стопоріння в неробочому положенні, виконаним у вигляді гідроциліндра, закріпленого іншим кінцем на додатковому ковші, а основний ківш сполучений з гідроциліндром управління, при цьому ріжуча кромка додаткового ковша маємо більший радіус копання, ніж ріжуча кромка основного ковша.
1.1.5 Робоче устаткування гідравлічного екскаватора
Авторське свідоцтво СРСР .N2 827695.
Автори: В.В. Мелавішин, Л.А. Хмара, В.І. Баловнев і В.И. Курочка.
Винахід відноситься до землерийних машин. Мета – зниження енергоємності процесу копання екскаватора в грейферномуу режимі. Ківш екскаватора включає передню і задню 1 ріжучу щелепи. Передня щелепа сполучена із задньою щелепою! важелями (Рис.l.9) 3, встановленими на кронштейні 4 задньої щелепи. Частина 1 шарнірно приєднана до рукояті 3 через кронштейн 4. Передня частина складається з монтажної 5 м робочої 6 частин, сполучених між собою шарніром 11, вісь якого розташована уздовж кромок бічних стінок передньої щелепи з можливістю форсованого повороту за допомогою штирів. Для фіксації передньої щелепи в необхідному положенні одне плече Р3 шарнірно сполучене з кронштейнами 4, в якому виконані отвори 9 для установки фіксуючих штирів 10. Ківш вмонтовується по рукояті 13 і гідроциліндром 14 повертається в площині симетрії робочого устаткування. Осі середніх шарнірів Р. сполучені з віссю шарніра, що сполучає щелепу 1 з рукояттю 13. Монтажна частина 5 шарнірно сполучена з гідроциліндром 8, встановленим на щелепі 1. Бенкет роботі в грейферномуу режимі Р3 повертається щодо кронштейна 4 і фіксуються у верхньому положенні штирями 10. Робоча частина 6 повертається на 180° на осі шарніра 11 і фіксується штирями.
Для забезпечення нормальної роботи передньої щелепи в грейферному режимі необхідно, щоб радіус повороту ріжучої кромки, що здійснює зачерпування матеріалу, був більше радіусу повороту ріжучої кромки, що не бере участь в роботі. В цьому випадку усувається «замикання». Робоче устаткування гідравлічного екскаватора включає ківш, що складається із задньої щелепи 1 з ріжучим ножем 2, до якого за допомогою важелів 3, встановлених на кронштейнах 4 задньої щелепи, шарнірно прикріплена передня щелепа, що складається з монтажної 5 і робочої б щелеп. Робоча частина б передній щелепі оснащена ріжучим ножем 7, а монтажна частина 5 шарнірно сполучена з гідроциліндром 8, встановлений на задній щелепі 1. Для фіксації передньої щелепи в необхідному положенні одне плече важеля 3 шарнірно сполучено з кронштейнами 4, в якому виконані отвори 9 з можливістю установки фіксуючих штирів 10. Монтажна частина 5 передньої щелепи сполучена з робочою частиною б за допомогою шарніра 11, вісь якого розташована з можливістю їх жорсткості по засобом фіксації за допомогою фіксуючих елементів 12, наприклад штирів. Ківш вмонтовується на рукояті 13 і за допомогою гідроциліндра 14 повертається в площині симетрично робочого устаткування. Осі середніх шарнірів двоплечових важелів суміщені з віссю шарнірі, сполучаючого задню щелепу 1 з рукояттю 13.
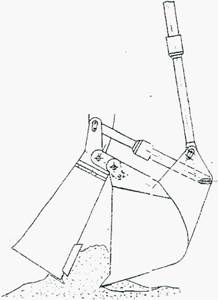
Рис.1.9 Робоче устаткування гідравлічного екскаватора в грейферному режимі.
Устаткування працює таким чином.
Задня щелепа 1 сумісно з передньою щелепою, що складається з монтажної 5 і робочої б частин, в зімкнутому за допомогою гідроциліндра 8 положення утворює ківш зворотної лопати. Управляючи гідроциліндром 14,обеспечивают поворотів ковша в площині симетрії устаткування і здійснюють розробку грунту.
При необхідності виконання грейферних операцій ківш "зворотної лопати" трансформується в грейферний.
При цьому виймаються фіксуючі штирі 10 і посередництвом гідроциліндра 8 здійснюється поворот по годинній стрілки передньої щелепи верхнє положення починають повертатися важелі 3 щодо кронштейнів 4, які потім фіксуються у верхньому положенні шляхом установки штирів 10 в отвори 9. Після чого робоча частина б передній щелепі повертається машиністом екскаватора на 180° на осі шарніра 11 і фіксується штирями 12. У такому вигляді ківш успішно застосовується для завантажувально-розвантажувальних робіт в грейферному режимі. Передні і задні щелепи повертаються щодо один одного за допомогою гідроциліндра 8 і при цьому виключаються затирання ріжучого ножа 7 передньої щелепи об грунт. Управляючи щелепами можна здійснювати затискач таким устаткуванням також різних вантажів і компактних, так і довго габаритних. При цьому здійснюється надійне і якісне затискач грунтів затискач щелепами вантажів завдяки виключенню у момент стулення щелеп упровадження ріжучого ножа 7 передньої щелепи в грунт.
Формула винаходу.
Робоче устаткування гідравлічного екскаватора, включаюче ківш з передньою і задньою ріжучими щелепами, рукоять, до якої задня щелепа при сполучена шарнірно через закріплені на щелепі кронштейни, гідроциліндри управління щелепами, відмінні тим, що, з метою зниження енергоємності процесу копання екскаватора в грейферному режимі, робоча частина передньої щелепи сполучена з її монтажною щелепою за допомогою шарніра, вісь якого розташована уздовж кромок бічних стінок цієї щелепи з можливістю фіксованого повороту, передня і задня щелепи сполучені за допомогою двоплечових важелів, осі середніх шарнірів яких суміщені з віссю шарніра, що сполучає задню щелепу з рукояттю, одне плече сполучене з монтажною частиною передньої щелепи, а інше – з кронштейнами задньої щелепи з можливістю фіксованого повороту важеля навколо його середнього шарніра.
1.1.6 Будівельний маніпулятор
Авторське свідоцтво СРСР N2 1293282.
Автори: Л.А. Хмара, В.И. Баловнев, А.І. Голубченко і С.В. Шатов.
Будівельний маніпулятор (Рис.l l0) включає базову машину 1 з бульдозерним відвалом 2, гідроциліндр управління 3 з відвалом 2. Над базовою машиною 1 встановлена опорна рама 4 із змонтованою на її верхній частині поворотною платформою 5. До поворотної платформи 5 шарнірно приєднана стріла 6, на кінці якої шарнірно змонтована рукоять 7. Стріла 6 і рукоять 7 забезпечені гідроциліндрами управління 8 і 9.
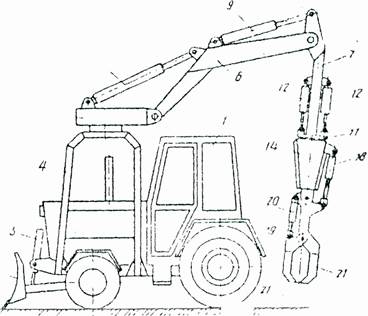
Рис. 1.10 Загальний вигляд будівельного маніпулятора.
На боковій поверхні рукояті 7 виконані подовжні пази 1 Про, в яких встановлений нажимний диск 11, пов'язаний з рукояттю 7 за допомогою силових гідроциліндрів 12. На кінці рукояті 7 виконаний двозахідний гвинт 13, який охоплюється роз'ємним корпусом 14,. Підшипник 15 змонтований на нажимному диску 11 за допомогою стопорного кільця 16. Відхід підйому в гвинтовій лінії двозахідного гвинта 13 має таке значення, що відсутніє самогальмування роз'ємного корпусу при його переміщенні вздовж двозахідного гвинта 13.
До нижньої частини роз'ємного корпусу шарнірно підвішений робочий орган, що складається із зовнішнього важеля 17, сполученого з роз'ємним корпусом за допомогою гідроциліндра 18, і внутрішнього важеля 19, пов'язаного із зовнішнім важелем 17 за допомогою гідроциліндра 20. При цьому, нижні робочі частини важеля 17 і 19 виконані у вигляді захоплень 21, що розходяться.
Запропонований будівельний маніпулятор дає можливість виконувати роботу по спушенню міцних і мерзлих грунтів.
Для цього внутрішній важіль 19 із затискачм і 21 повертається проти годинникової стрілки гідроциліндром 20в верхнє крайнє положення. Далі поворотами стріли 6, рукоятки 7,наружного важеля 17 за допомогою гідроциліндрів 8, 9, 18 здійснюється процес спушення грунту затискачми 21 зовнішнього важеля 17.
Формула винаходу
Будівельний маніпулятор, що включає базову машину, шарнірно встановлену на ній стрілу, рукоять, шарнірно пов'язану із стрілою, робочий орган і механізм повороту робочого органу з гвинтовою парою із зовнішнім і внутрішнім елементами і гідроциліндром, пов'язаним з рукояттю, відрізняється тим, що, з метою спрощення конструкції за рахунок використовування стандартних гідроциліндрів, рукоять виконана з подовжніми пазами і має встановлений в них нажимний диск, при цьому механізм повороту має додатковий гидроципіндр, а нажимний диск пов'язаний із зовнішнім елементом гвинтової пари за допомогою підшипників і з рукояттю пов'язаний гідроциліндрами.
1.1.7 Пристрої для виконання земляних і навантажувально-розвантажувальних робіт
Авторське свідоцтво СРСР N2 1027338.
Автори: П.И. Неміровській, В.И. Репнев, Б.А. Емельянов, В.Г. Бут, .А. Брайковській, З.Н. Кузин, Б.Ю. Маліновській, Б.Н. Бухбіндер, А.С. Соловйов і Я.С. Сорін.
1) Пристрій для виконання земляних і навантажувально-розвантажувальних робіт, включаюче встановлену на самохідному шасі поворотну платформу, стрілу і дві рукояті з робочими органами, поворотні навколо подовжньої осі і в площині, що проходить через їх подовжні осі, відмінні тим, що, з метою розширення технологічних можливостей, забезпечено проміжною ланкою, шарнірно пов'язаною із стрілою з можливістю повороту в площині підйому стріли, а рукояті встановлені на проміжній ланці з можливістю обертання навколо його подовжньої осі і поворотно-поступального переміщення уздовж його подовжньої осі.
2) Пристрій по п.l, відмінний тим, що проміжна ланка порожнистим елементам, і корпуси механізму повороту рукоятей в площині, що проходить через їх подовжні осі, встановленого з можливістю обертання усередині порожнистого елементу, причому механізм повороту рукоятей в площині, що проходить через їх подовжні осі, виконаний у вигляді зубчатої передачі, ланки якої виконані у вигляді зубчатих секторів, на яких встановлені рукояті, і приводу.
3) Пристрій по п. 1 і 2, відмінне тим, що механізм поворотно-поступального переміщення рукоятей уздовж подовжньої осі проміжної ланки виконаний у вигляді гідроциліндра, шток якого сполучений з порожнистим елементом, а корпус закріплений на кожусі проміжної ланки.
4) Пристрій по п. 1 і 2, відмінне тим, що механізм обертання рукоятей навколо подовжньої осі проміжної ланки виконаний у вигляді гідромотора, встановленого на порожнистому елементі, і черв'ячної передачі, черв'ячне колесо якої встановлене на корпусі механізму повороту рукоятей в площині, що проходить через їх подовжні осі.
5) Пристрій по п.l і 2, відмінне тим, що привід повороту рукоятей в площині, що проходить через їх подовжні осі, виконаний у вигляді гідроциліндра, шток якого шарнірно сполучений з одним із зубчатих секторів, а корпус шарнірно укріплений в корпусі механізму повороту рукоятей.
6) Пристрій по п. 1 і 2, відмінне тим, що механізм обертання кожної рукояті навколо своєї подовжньої осі виконаний у вигляді гідромотора і черв'ячної передачі, встановлених відповідно на кожному зубчатому секторі механізму повороту рукоятей, а кожна рукоять відповідно встановлена на вихідному валу черв'ячної передачі.
Відомо будівельна машина, що призначена для виконання як земляних, так і навантажувально-розвантажувальних робіт, містить шасі, поворотну платформу, стрілу, рукоять і ківш з щелепою. Ківш приєднаний до рукояті за допомогою двох шарнірної вставки з взаємно перпендикулярними осями шарнірів. Відому машину можна використовувати для копання зворотною лопатою, навантажувально-розвантажувальних робіт з сипкими матеріалами, здійснюючи затискач матеріалу щелепою і ковшом, як грейфером. Наявність двох шарнірної вставки дозволяє здійснювати маніпулювання захопленими предметами.
Недоліком відомої машини є низька продуктивність при роботі грейфером за рахунок неповного використовування об'єму ковша і переміщення, в слідстві цього малого об'єму грунту в одиницю часу, а також обмежені можливості маніпулювання захопленими предметами.
Найближчим до пропонованого по технічній суті і результату, що досягається, є пристрій для виконання земляних і навантажувально-розвантажувальних робіт, включаюче встановлену на самохідному шасі поворотну платформу, стрілу і дві рукояті з робочими органами, поворотні навколо подовжньої осі і в площині проходячої через їх подовжні осі.
Даний пристрій можна використовувати для проведення різних видів робіт: копання прямою або зворотною лопатою, роботи в режимі грейфера, затискач і маніпулювання окремими предметами і т.д., не витрачаючи часу на монтажні і демонтажні роботи.
Недоліком пристрою є те, що при використовуванні його як грейфер або затискач останні жорстко орієнтовані в площині, перпендикулярній площині підйому стріли. Внаслідок цього обробка траншей можлива тільки по осі руху базової машини і неможливе орієнтування в просторі об'єктів маніпулювання.
Мета винаходу – розширення технічних можливостей маніпулятора будівельних машин.
Поставлена мета досягається тим, що пристрій для виконання - земляних і навантажувально-розвантажувальних робіт, включаюче встановлену на самохідному шасі поворотну платформу, стрілу і дві рукояті з робочими органами, поворотні навколо подовжньої осі і в площині, що проходить через їх подовжні осі, забезпечено проміжною ланкою, шарнірно пов'язаною із стрілою з можливістю повороту в площині підйому стріли, а рукояті встановлені на проміжній ланці з можливістю обертання навколо його подовжньої осі і поворотно-поступального переміщення уздовж його подовжньої осі.
Крім того, проміжна ланка виконана у вигляді кожуха зі встановленим в·нем з можливістю поворотно-поступального переміщення уздовж його подовжньої осі порожнистим елементом, і корпуси механізму повороту рукоятей в площині, що проходить через їх подовжні осі, встановленого з можливістю обертання усередині порожнистого елементу, причому механізм повороту рукоятей в площині, що проходить через їх подовжні осі, виконаний у вигляді зубчатой· передачі, ланки якої виконані у вигляді зубчатих секторів, в яких встановлені рукояті, і приводу.
Механізм обертання рукоятей навколо подовжньої осі проміжної ланки виконаний у вигляді гідромотора, встановленого на порожнистому елементі, і черв'ячної передачі, черв'ячне колесо якої встановлене на корпусі механізму повороту рукоятей в ·площини, що проходить через їх подовжні осі.
Привід повороту рукоятей в площині, що проходить через їх подовжні осі, виконаний у вигляді гідроциліндра, шток якого шарнірно сполучений з одним із зубчатих секторів, а корпус шарнірно укріплений в корпусі механізму повороту рукоятей.
Механізм обертання кожної рукояті навколо своєї подовжньої осі виконаний у вигляді гідромотора і черв'ячної передачі, встановлених відповідно на кожному зубчатому секторі механізму повороту рукоятей, а кожна рукоять відповідно встановлена на вихідному валу черв'ячної передачі.
Пристрій для виконання земляних і навантажувально-розвантажувальних робіт (Рис.1.11) складається з поворотної платформи 1, змонтованої на самохідному шасі 2, стріли 3, проміжної ланки 4, сполученого із стрілою за допомогою шарніра 5 з можливістю повороту в площині підйому стріли, двох рукоятей 6 і робочих органів 7. Обидві рукояті змонтовані на проміжній ланці 4 з можливістю обертання навколо його подовжньої осі, поворотно-поступального переміщення уздовж неї, повороту в площині, що проходить через подовжні осі рукоятей, і обертання навколо своєї подовжньої осі. Кожен робочий орган 7 виконаний у вигляді затискач і змонтований на кінці рукояті 6 з можливістю повороту в площині повороту рукоятей.
Проміжна ланка 4 виконана у вигляді кожухів (Рис.1.12), усередині якого з можливістю поворотно-поступального переміщення уздовж його подовжньої осі встановлений порожнистий елемент 9. Усередині порожнистого елементу 9 з можливістю обертання встановлений корпус 10 механізму 11 повороту рукоятей і площини, що проходить через їх подовжні осі . Механізм 11 повороту рукоятей виконаний у вигляді зубчатих секторів 12, на яких змонтовані рукояті 6.
Механізм поворотно-поступального переміщення рукоятей 6 уздовж осі проміжної ланки 4 виконаний у вигляді гідроциліндра 13, шток якого сполучений з порожнистим елементом 9, а корпус закріплений в кожусі 8, проміжної ланки 4.
Механізм обертання рукоятей 6 навколо подовжньої осі проміжної ланки 4 виконаний у вигляді гідромотора 14, який змонтований на рухомому елементі 9 проміжної ланки, і черв'ячної передачі 15, черв'ячне колесо 16 якого закріплене на корпусі 10 механізму повороту рукоятей в площині, що проходить через їх подовжні осі.
Поворот рукоятей 6 в площині, що проходить через їх подовжні осі, здійснюється за допомогою приводу, виконаного у вигляді гідроциліндра 17, шток якого шарнірно сполучений з одним із зубчатих секторів 12, а корпус закріплений в корпусі 10 механізму 11 повороту рукоятей. Механізм обертання рукоятей 6 навколо своєї подовжньої осі виконаний у вигляді гідромотора 18 і черв'ячної передачі 19, які змонтовані на зубчатому секторі 12 механізму повороту рукоятей, при цьому рукоять 6 змонтована на вихідному валу 20 черв'ячної передачі. Для збільшення жорсткості конструкції на рукоятях 6 закріплені упори 21. Для виконання земляних робіт пристрій оснащений ковшами.
За рахунок конструкції маніпулятора при виконанні ним різних робіт рукояті 6 мають нагоду поворотно поступального переміщення уздовж подовжньої осі проміжної ланки 4, обертання навколо неї, повороту в площині, що проходить через подовжні осі рукоятей, і обертання навколо своєї подовжньої осі, що дозволяє шляхом перетворення пристосовувати маніпулятор до властивостей середовища і видів робіт.
За допомогою вказаних приводів і наявності на рукоятях 6 універсальних зачепів 7 маніпулятор (Рис.1.13) має нагоду маніпулювати різними об'єктами: переміщати і орієнтувати в просторі будівельні матеріали і конструкції, виконувати навантажувально-розвантажувальні операції з довгомірними вантажами, виробляти стиковку і укладання в траншею дренажних труб і т.д. Крім того, для виконання земляних робіт (Рис.l.l4) за допомогою захоплень 7 пристрій оснащується різним екскаваційним інструментом. До їх числа відносяться один або два ковши різною. місткості і конфігурації. е допомогою механізму обертання рукоятей 6 навколо подовжньої осі проміжної ланки 4 ківш швидко встановлюється прямою або зворотною лопатою. Для отримання устаткування у вигляді грейфера ковши встановлюються за допомогою гідродвигунів 18 І черв'ячної передачі 19 ріжучою кромкою назустріч один одному, при цьому упори 21 взаємодіють один з одним, перешкоджаючи повороту рукоятей площини, що проходить через їх подовжні сили, і забезпечуючи тим самим жорсткість конструкції. Положення ковшів може мінятися в широких межах. Це дозволяє риття траншеї у вертикальній площині, як по осі базової машини, так і у вертикальній площині, зміщеній щодо подовжньої осі базової машини.
1.11. Пристрій для виконання земляних і навантажувально-розвантажувальних робіт в робочому стані загальний вигляд.
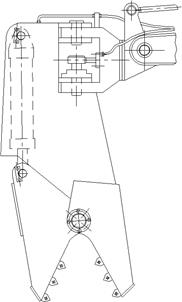
1.12. Проміжна ланка, подовжній розріз.
![]()
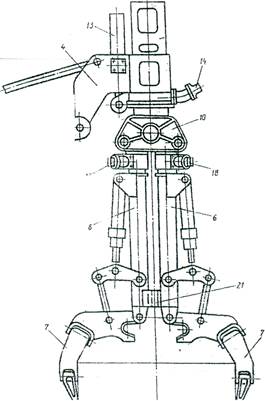
1.13 Пристрій при роботі як затискач.
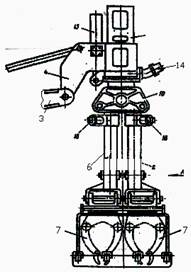
1.14. Оснащення пристрою інструментом по схемі прямої або зворотної лопати.
Конструктивне виконання пристрою забезпечується в результаті перетворення конструкції без демонтажно-монтажних робіт, пристосування його до властивостей середовища і видів робіт: захопленню і орієнтації в просторі окремих предметів, копанню прямою або зворотною лопатою, роботі в режимі грейфера з риттям траншеї і вертикальної площини як по осі, так і у вертикальній площині, зміщеній щодо подовжньої осі базової машини і т.д. Наявність на рукоятях універсальних захоплень дозволяє працювати різними типами устаткування. Це можуть бути ковши різної місткості, ковші планувальники, механізований інструмент і т.д. Таким чином, технологічні можливості маніпулятора. будівельної машини значно розширені.
1.2 Аналіз патентних рішень
Проведений патентний огляд показав, що існує велика кількість видів захоплень. Совершенствщшніє їх конструкцій направлено головним чином на розширення технологічних можливостей устаткування, на підвищення продуктивності екскаваторів.
Проте аналіз патентів і винаходів показав, що існує ряд недоліків, що обмежують застосування відомих конструкцій: необхідність в складному гідравлічному приводі, застосування дорогого устаткування' (авторське свідоцтво N2 3767070), значні габаритні розміри і трудність роботи в обмежених умовах (авторське свідоцтво N2 1293282), складність виготовлення і ремонту, необхідність в ручному переналагодженні устаткування, значна металоємність (авторське свідоцтво N2 1027338).
1.3 Пропоноване удосконалення
Робоче устаткування гідравлічного екскаватора (Рис.1.15.) полягає їх захвата1, що містить корпус 2 з шарнірно приєднаною рухомою щелепою 3 і нерухомою щелепою 4. Щелепа 3 кріпиться за допомогою шарніра 5. Рухома щелепа 3 приводиться в рух за допомогою гідроциліндра б.Поворот затискач 1 здійснюється в діапазоні від Про до 1800 і здійснюється за допомогою гідромотора 7. Повертається затискач щодо нерухомого кріплення 8. Корпус затискач 2 і кріплення 8 сполучені за допомогою пальців 9 і 10. Робоче устаткування гідравлічного екскаватора також включає стрілу 11, базову машину 12, гідроциліндри управління 13 і 14.
Запропоноване робоче устаткування (рис.1.16.) дає можливість проводити відновні роботи, навантажувально-розвантажувальні роботи об'ємних вантажів. Робоче устаткування для відновних робіт, що включають базову машину, шарнірно встановлену на ній стрілу, робочий орган з механізмом повороту і кріпленням робочого органу, який шарнірно пов'язаний із стрілою базової машини.
Перевага цього устаткування: поворот тільки затискач, платформа на місці - обмежені умови.
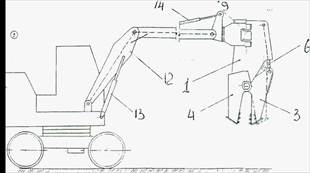
1.15 Робоче устаткування гідравлічного екскаватора разом з базовою машиною.
1.16 Загальний вид робочого устаткування.
2. Опис конструкції машини і технології виробництва робіт
Екскаватор (рис.2.l.) складається з екскаватора базового 1, включаючий основні вузли і системи: пристрій ходовий 2; платформа поворотна 3 з механізмами і агрегатами, системи сервокерування, пневмосистеми, електроустаткування, системи опалювання і вентиляція, бульдозера 4 і робочого устаткування з гідросистемою 5.
Поворотна платформа 3 спирається на раму пристрою ходового 2 через роликовий опорно-поворотний пристрій.
Рух екскаватора і його робочого органу здійснюється гідравлічним приводом, основними елементами якого є: гідронасос, гідророзподілювачі, клапанно-запобіжна апаратура, гідромотори ходу і повороту, гідроциліндри стріли, затискач і зіву, бак робочої рідини і сполучні трубопроводи.
Гідропривід екскаватора в поєднанні з гідравлічним сервокеруванням забезпечує плавне регулювання швидкості і поєднання робочих операцій стріли, затискач і зіву поворотом.
Електроустаткування дозволяє запуск двигуна екскаватора з кабіни і з майданчика обслуговування двигуна.
Конструкція кабіни машиніста, прилади, розташовані на панелях пульта управління, системи опалювання і вентиляція забезпечують нормальні умови роботи машиніста.
На екскаваторі встановлений двигун СМД-17Н або СМД-15Н чотирьохтактний чотирициліндровий дизель рідинного охолоджування з вихрокамерним сумішеутворенням і турбо наддуву (СМД-17Н).
Дана машина на базі гідравлічного екскаватора Ю-4321 з робочим устаткуванням - затискач, призначена для виконання відновних робіт. Ці роботи ведуться на будівельних майданчиках для руйнування старих будівель. Затискач в змозі поруйнувати бетонну, цегляну стіну, колону діаметром до 700мм, а також виконати вантажний - розвантажувальні роботи з вантажем до 1500кг І самостійно вантажити його в транспортний засіб. Крім того, ця машина застосовується при розчищання завалів, що виникли після землетрусу, для цього вона оснащена допоміжним устаткуванням - відвалом бульдозера.
Екскаватор може виконувати вказані роботи в діапазоні температур від 233К (мінус 40 °С) до 313К (плюс 40 °С), а також виконувати роботи в темний час доби, для цього оснащений світловими приладами.
Технологія виробництва робіт показана на малюнку 2.2. і на малюнку 2.3.
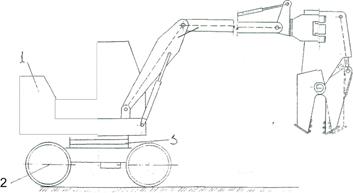
Рис.2.1 Загальний вид екскаватора.
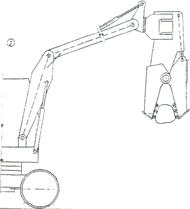
Рис.2.2. Процес затискач елементу.
Вигляд А
Вигляд В
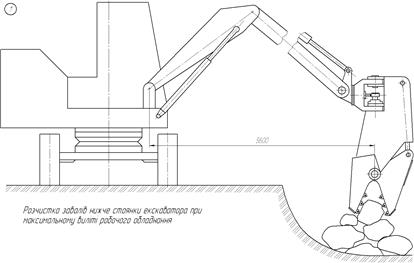
2.3. Робота екскаватора на максимальному вильоті.
3. Розрахунок екскаватора ео-4321 з робочим устаткуванням затискач
3.1 Стрілопідйомний механізм
Допустимі значення відстаней до осі шарніра кріплення корпусу гідроциліндра до поворотної платформи.
хц < 0,5∙Допк +(0,1...0,15)=0,5∙1,5+0,1=0,85 м,
1/3
Допк =0,55∙m=0,55∙19,86=1,5 м,
де m – маса екскаватора, т;
Допк - діаметр опорний - поворотного круга, м;
![]()
де хц , Yц – орієнтовна відстань відповідно від осі опорно-поворотного круга і від рівня стоянки екскаватора до осі провушини корпусу гідроциліндра;
hпл - висота платформи, hпл =0,15 ... 0,25м.
Відстань по вертикалі від рівня стоянки екскаватора до осі повороту стріли
Yс = (Нв -Нк) /2+lз +R=(3-5.8) /2+2,75+ 1,3=2,15 м.
Розрахункові параметри, які необхідні для його вибору по нормах, рекомендується визначати по орієнтовних значеннях кута установки β і довжини 1 нерухомої ланки, повного кута повороту φ0 = 90° стріл і довжини плеча ρк зусилля, що розвивається на штоку гідроциліндра.
Приймаємо кут β= 40° і визначаємо орієнтовну довжину нерухомої ланки
L= (YС - Yп )/соsβ = (2,65 - 1,137)/cos40° =0,98 м
Розрахунковий хід поршня:
р = 2Lsin(φ0 /2)= 20,98sin(90°/2)= 1,385 м
Орієнтуємося на близьке до вертикального напряму (µ=90°) осі гідроциліндра з повністю висунутим штоком, тоді відстань rк від осі повороту стріли до осі гідроциліндра, тобто довжина плеча зусилля на штоку:
Rк = lsin( µ - β)=0,98 sin(90° - 40°)= 0,75 м
Визначимо момент від сил тяжіння робочого устаткування з вантажем, за умови, що приведена до головки маса стріли mс.пр. =0,4∙2640=1056 кг:
Розрахунковий діаметр гідроциліндра:
![]()
По діаметру Др і ходу поршня Sp вибираємо гідроциліндр:
J= 125 мм; S= 1400 мм; у=1,65; S=1,845; 5к = 3 245; N= 1,758.
При використовуванні в стрілопідйомних механізмах золотникових гідроциліндрів з П = 1,65 і насосів з діапазоном регулювання п = - 1 .... 2,5 для обмеження максимальних динамічних навантажень в циліндрі рекомендуються кути тиску: ТН = 70,6°; ТК = 74,6°.
По параметрах вибраного гідроциліндра і прийнятим значенням кутів тиску радіус коромисла:
![]()
![]()

Повний кут повороту відомої ланки (стріли):
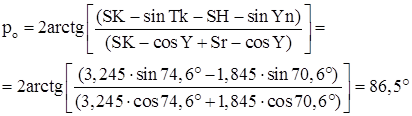
Початковий кут відхилення відомої ланки:
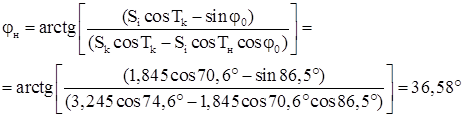
Довжина нерухомої ланки:

Для перевірки обчислень по знайдених лінійних параметрах Р, L, φп визначимо розрахункову початкову і кінцеву величини гідроциліндра:
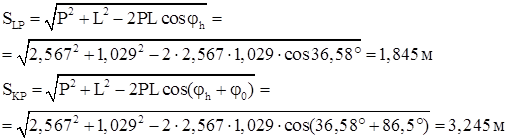
Якщо з точністю вироблених обчислень SLP =Si <SKP =SK , то параметри механізму визначені правильно. Вважаючи уц = 1,4м, знайдемо кут установки нерухомої ланки:
β= arccos[(yc -yц ) /L]=аrссоs[(2,15 - 1,4)/1,029]= 43,21°
Приймаємо Хс =Хц =0,85 м, обчислюємо відстань від осі опорно-поворотного пристрою до осі п'яти стріли:
Хс =Хц -L∙sinβ= 0,85-1,029∙sin43°21”= 0,145 м
Теоретичну довжину стріли знаходимо як відстань між головкою і її п'ятою, суміщеною з крапкою:

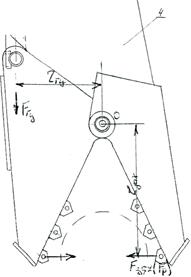
Рис.3.1 До розрахунку зусиль в робочому устаткуванні.
3.2 Механізм повороту затискач
Механізм повороту затискач розраховується для фіксованого нижнього положення гранично опущеної стріли. Повний кут повороту рукояти повинен складати φ= 110°…130°, приймаємо φ = 130°. Кут φy відхилення осі рукояті від теоретичної осі стріли при втягнутому штоку гідроциліндра вибираємо в межах: φу =20° ... 30°, приймаємо φу = 25°.
Орієнтовну довжину ![]() радіусу коромисла визначаємо по формулі:
радіусу коромисла визначаємо по формулі:
![]() =(0,35…0,65)∙=0,4∙2,7=1,08 м.
=(0,35…0,65)∙=0,4∙2,7=1,08 м.
Розрахунковий хід поршня:
Sp
= 2∙![]() ∙sin(φo
/2)= 2∙1,08∙sin(130°/2)= 1,25 м
∙sin(φo
/2)= 2∙1,08∙sin(130°/2)= 1,25 м
Відстань ![]() від осі повороту рукояті до осі гідроциліндра:
від осі повороту рукояті до осі гідроциліндра:
![]() = (0,7 ... 0,75)∙p= 0,7∙1,08= 0,75 м
= (0,7 ... 0,75)∙p= 0,7∙1,08= 0,75 м
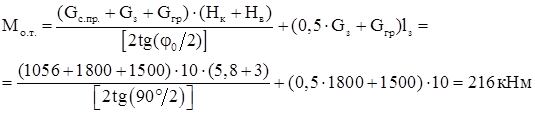
Момент опору повороту рукояті:
Мот =Gзг (Iз +0,5R)+Gз ∙0,35∙Із =(1800+1500)∙10∙(2,7+0,5∙1,3)+1800∙10∙0,35∙2,7= 127560 Нм.
Розрахунковий діаметр поршня знаходимо при z= 1:

По діаметру Др і ходу Sp поршня вибираємо гідроциліндр Д= 125мм, d= 60мм, S= 1250мм, So = 0,435м, SH = 1,685м, So = 2,935(Ψ= 1,65).
Виходячи із забезпечення рівності кутів тиску і довжин плечей зусилля для крайніх положень штока визначаємо параметри механізму приводу затискач при γн = γк = 0,5;
φ0 = 0,5∙130°= 65°;
ρ= ![]() = 0,67м;
= 0,67м;


Довжини плечей зусиль, що розвиваються гідроциліндром в крайніх положеннях штока:
rн = ρІsinφн /Sн =0,67∙2,32∙sin17,8°/1,685= 0,282 м;
rк = ρІsin(φн +φ0 )/Sк =0,63∙2,32∙sin(17,8°+130°)/2,935= 0,282 м
Оскільки параметри механізму були визначені з умови rH =rK , розрахунок виконаний правильно.
Рушійний момент від гідроциліндра в крайніх положеннях при Номінальному тиску Р н в поршневій порожнині гідроциліндра:

Кут β відхилення осі нерухомої ланки від теоретичної осі стріли повинен бути не менше кута між осями теоретичної осі стріли і її верхньої частини. При λ= 10°:
В= 25° - φ0 + λ= 25° - 17,8° + 10° = 17,2°,[3]
3.3 Розрахунок зусиль в робочому устаткуванні
3.3.1 Розрахунок зусиль в гідроциліндрі робочого устаткування
а) Утримання вантажу.
Для знаходження зусилля в гідроциліндрі при утриманні вантажу, необхідно визначити суму моментів відносно крапки О (мал. 3.1);
∑М0 =0, тоді;
Fгц rгц -Fзах rзах =0,
Fгц =Fзах rзах /rгц ,
де, Fгц – зусилля в гідроциліндрі, Н; Fзах – зусилля затискач, Н;
rгц = 0,65 м; rзах = 0,78 м – плечі зусиль.
Fзах = Qf,
де Q = 15000Н - вантажопідйомність екскаватора;
f= 0,2 - коефіцієнт тертя;
Fзах = 15000∙0,2= 3000 Н;
Fгц = 0,78∙3000/0,65= 3600 Н.
б) Руйнування бетону.
Як і у випадку а) знаходимо суму моментів щодо точки О.
∑M0 = 0, тоді
Fгц rгц - Fр rр = 0,
де, Fр - зусилля необхідне для руйнування бетону, Н;
rр = 0,78 м - плече зусилля руйнування;
rгц = 0,65 м;
Fгц =Fр rр /rгц ;
Rск - розрахунковий опір сколюванню матеріалу, Мпа; [1].
F - площа перетину, руйнованого матеріалу, м;
Rск = 2Rbt,
де Rbt = 1Мпа - розрахунковий опір розтягуванню для бетону.[2]
Площа перетину, руйнованого матеріалу:
F= πD2 /4,
де D= 0,7м - діаметр перетину;
F = 3,14 (0,7)2 /4= 0,385 м;
Fр = 0,385∙2∙10=770000 Н;
Fгц = 770000 0,78/0,65= 924000 Н.
Діаметр гідроциліндра:
Dru
= ,
,
де g= 25Мпа - тиск в гідросистемі;
Dгц
=
Вибираємо гідроциліндр з кріпленням на провушині, з діаметром поршня D= 220 мм; діаметром штока d= 110 мм; діаметром провушини do = 80 мм.
3.3.2 Визначення зусиль в поворотному механізмі
Знайдемо крутний момент, що розвивається гідродвигуном:
Мкр. = N/ω,
де, N - потужність, Вт;
ω - кутова швидкість, рад/с;
ω= π n/30,
де, ω= 3,14∙50/30= рад/с
n - частота обертання, n = 50 об/с = 3000 об/мин.
N=P V,
де, Р - необхідне зусилля, Н;
V - лінійна швидкість, V= 0,5 м/с;
P= (Gобр + Gгр )fcк ,
де, Gобр , Gгр - відповідно вага устаткування і вага вантажу, Н;
fск = 0,2 - коефіцієнт ковзання.
Р= (18000+15000)∙0,2= 6600 Н;
N= 6600∙0,5= 3300 Вт;
Мкр = 3300/5,23= 631 Нм.
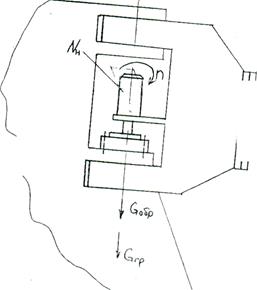
Рис. 3.2 До розрахунку моменту, що крутить, що розвивається гідродвигуном
3.4 Розрахунок елементів робочого устаткування на міцність
3.4.1 Розрахунок осі повороту рухомого ножа
Знайдемо діаметр осі:
σ=Мизг /W, де W=0,ld3
σ=Мизг /0,1 d3 , звідси
d=![]()
де, σ =250 Мпа - межа міцності для металу.
Мізг = Fгц rгц = 924000∙0,65= 600600 Н;
Приймаємо d=140 мм.
4. Об'ємний гідропривід екскаватора
4.1 Опис гідросистеми екскаватора
Привід всіх рухів на екскаваторі, за винятком приводу гідронасоса, гідравлічний.
Максимальний робочий тиск в гідросистемі р= 25±1,6 Мпа (250±16 кгс/см2).
Гідросистема включає:
- бак робочої рідини Б;
- гідронасоси НА, НШ1,НШ2 з приводом від двигуна внутрішнього згорання моделі СМД-17Н або СМД-15Н;
- контрольну і розподільну апаратуру;
- апаратуру фільтрації робочої рідини;
- систему сервокерування;
- гідросистему рулюючи, трубопроводи і приєднувальні елементи;
- систему охолоджування робочої рідини.
Бак робочої рідини, насосна установка, розподільна і клапанна апаратура, гидромотор повороту встановлені на поворотній платформі. Всі виконавчі механізми знаходяться безпосередньо коло робочих органів, що приводяться ними в рух.
Джерелом руху в гідроприводі робочих рухів екскаватора служить здвоєний аксіальний – поршневий насос 4НА. З метою економічного використовування потужності двигуна в насосах цієї моделі застосований спеціальний механізм – регулятор потужності, автоматично змінюючий кут нахилу поворотних корпусів.
Область рухів, в якій працює регулятор потужності 12 ... 25Мпа (120 ... 250 кгс/см2). При тиску 12Мпа (120 кгс/см2) подач кожного насоса складає Q = 120 дм/мин. У міру зростання руху вона знижується, доходячи при русі 25 ± 1,6Мпа (250 ± 16 кгс/см2) до Q = 60 дм/мин.
На кожній нагнітальній лінії насоса встановлені запобіжні клапани КП1 і КП2 для захисту системи і насосів від перевантажень. У корпусах клапанів є отвору для установки контрольних манометрів.
Розподіл робочої рідини здійснюють три гидророзподілювача Р 1, Р2, Р3.
У кожному гидророзподілювачі знаходиться три золотники.
Управління золотниками пружинно-гідравлічне здійснюється від гідронасоса НШ2. Від цього ж насоса за допомогою блоку управління БVl включаються гідроциліндри редукторів задніх коліс Ц8, Ц9. Запобіжний клапан ЗН2 служить для підтримки тиску в магістралі сервокерування.
Від секції А гідронасоса НА робоча рідина поступає до гидророзподілювачу Р 1, управляючому роботою гідромотора повороту платформи М3 (золотник Пп), гідромоторами переднього моста Мl, М2 (золотник Хп) і гідродвигуном затискач Дl (золотник Пз). При нейтральному положенні всіх цих золотників потік робочої рідини проходить через гідророзподілювач Р 1 і поступає в гідророзподілювач Р2, управляючий роботою циліндра бульдозера Цl (золотник Би), циліндрами опорних черевиків Ц2; Ц3 (золотник Про) і Гідромоторамі заднього моста М4, М5 (золотник Хз).
Секція б насоса НА підключена до золотника Хз гідророзподілювача Р2.
При нейтральному положенні золотників гідророзподілювача Р 1 і золотників Би і Об гідророзподілювача Р2 потік робочої рідини, що нагнітається обома секціями насоса НА поступає на золотник Хз і далі, в - випадку знаходження золотника Хз в нейтральному положенні, до гідророзподілювачу Р3, управляючому роботою циліндрів стріли Ц4, Ц5 (золотник С), циліндром зіву ЦБ (золотник Зв) і циліндром затискач Ц7 (золотник 3).
Таким чином, виконавські органи, керовані золотниками Пз, Хп, Пп,Б, Про (назвемо їх групою 1) харчуються продуктивністю однієї секції насоса, а виконавські органи керовані золотниками Хз, З, Зв, 3 (назвемо їх групою 2), при нейтральному положенні золотників 1 групи харчуються від двох секцій насоса НА.
Гідросистема екскаватора дозволяє суміщати один робочий рух групи 1 з одним робочим рухом групи 2.
З метою отримання можливості поєднання рухів бульдозера з роботою гідромоторів переднього моста золотники Хз і б сполучені між собою додатковим трубопроводом. Для поєднання роботи стріли і ковша робоча рідина до розподільного блоку РЗ підводиться через золотники З і Зв.
Якщо ж всі золотники знаходяться в нейтральному положенні або всі золотники розподільних блоків Р 1, Р2· зміщені з нейтрального положення, потік обох секцій прямує в бак Б. Прі цьому зливний потік залежно від температури робочої рідини прямує в бак через апарат теплообмінний АТ або безпосередньо в бак.
Для управління зливним потоком в системі передбачений кран перемикання зливу КПС. Якщо золотники розподільного блоку Р3 Зміщені з нейтрального положення, то злив робочої рідини здійснюється в бак, минувши апарат теплообмінний. Перш ніж повертатися в бак, робоча рідина проходить через зливний фільтр Ф l, Ф2.
Для оберігання системи повороту платформи у момент гальмування в гідросистемі встановлений блок клапанний КДЗ; КД4.В системі ходу встановлені клапани перепускні КД5(l), КД6(1), КД5(2), КД6(2). Для захисту магістралей від реактивного тиску в лініях безштокових порожнин циліндрів ковша і рукояті і штокових порожнин циліндрів стріли встановлені завантажувальні клапани КР 1 і КР2.
Зв'язок між виконавськими органами, що знаходяться на ходовому візку і розподільною апаратурою здійснюється за допомогою центрального колектора КЦ.
Для підведення робочої рідини в гідросистему рульового керування служить гідронасос НШl, насос планетарний НП, золотник управління ЗУ, циліндр повороту коліс Ц10. Тиск в системі рульового управління ограничивается запобіжним клапаном ЗНl.
Підведення рідини до циліндрів опорних черевиків здійснюється через замочні клапани КЗ2, до циліндра бульдозера – через замочний клапан КЗ1, до циліндрів стріли, за допомогою трубопроводів і рукавів високого тиску. На штоковій магістралі циліндра рукоятки і поршневий циліндра стріли встановлені дроселі ДРl, ДР2.6.
4.2 Розрахунок гідроциліндра ножа
Початковими даними для гідравлічного розрахунку гідроциліндра. Ножа є зусилля, необхідне для руйнування бетону F=924 кH. Приймаємо механічний ККД=0,93. Гідроциліндр з поршневою робочою порожниною А (рис. 4.1). Визначимо діаметр гідроциліндра:
![]()
де Р= 25 МПа - тиск в гідросистемі екскаватора.
![]() .
.
Приймаємо стандартний діаметр D= 250 мм.
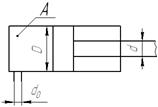
Рис. 4.1 Гідроциліндр ножа.
Визначимо діаметр штока гідроциліндра; D=кD де к=0,5.
Тоді: D=0,5∙250=125 мм.
Цей діаметр відповідає стандартному ряду діаметрів.
Визначимо швидкість руху поршня:
![]() ,
,
де Qн =240 л/хв - подача насоса,
ηоб = 1 – об'ємний ККД гідропривода.
Знайдемо мінімальний діаметр отвору, що підводить:

де, Vо = 5м/с - середня швидкість масла в цьому отворі;
Q= 240 л/хв - витрата масла.
 .
.
Визначимо тиск в робочій порожнині при зусиллі F = 924 кН;

Визначимо максимальне зусилля, що розвивається гідроциліндром при робочому і зворотному ходу поршня і при максимальному тиску Р=25Мпа.
а) При робочому ходу:
Fo =pπD2 ηм /4=25∙106 3,14∙0,252 ∙0,93/4=11407034 Н;
б) При холостому ходу:
Fox =pπ(D2 -d2 )ηм /4=25∙106 ∙3,14∙(0,252 -0,112 )∙0,93/4=919863 Н.
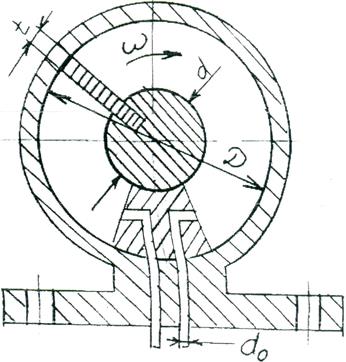
4.3 Розрахунок шиберного поворотного гідродвигуна (ШПД)
Початкові дані для розрахунку: максимальний крутний момент М= 631 Нм, приймаємо механічний ККД ηм =0,8. Визначимо діаметр суцільного валу:
![]()
де с= 25мм - добавка на ступінчасту конструкцію валу ШПД, (рис.4.2);
{tkp}= 50 МПа - напруга, що допускається, на кручення суцільного вала ШПД.
![]() .
.
Приймаємо стандартний d= 80 мм.
Визначимо внутрішній діаметр:
D =md, де, m =1,5, тоді: D=80∙1,5=120 мм.
Приймаємо стандартний діаметр D=125 мм.
Знайдемо ширину шибера ШПД: прийнявши р=16 МПа - тиск в гідросистемі ШПД, pпр = 0,5 Мпа - протіводавленіє, k= 1.

Пінімаєм ширину шибера ШПД В= 45мм.
Перевіримо на дотримання умов:
0,5 ≤ (D - d)/2∙В ≤ 1.5,
0,5 ≤ (125 - 80)/2∙45 ≤ 1.5,
0,5=0,5, тобто умова дотримується.
Визначимо мінімальний діаметр отвору, що підводить, прийнявши середню швидкість руху масла = 5м/с:

де GH =240 л/хв – подача насоса.
 .
.
Визначимо максимальну кутову швидкість повороту затискач:
де ηоб - об'ємний ККД, ηоб =1, Q=240;

Визначимо крутить момент, що розвивається ШПД при робочому тиску Р=16 Мпа і прийнятій ширині шибера В = 45мм; (7)
Ммах =(Р-Рпр )∙(D2 -d2 )Вкηм /8=(16-0,5)∙106 (1252 -802 )∙10-6 ∙45∙10-3 ∙1∙0,8/8=643,5 Нм.
|
5. Охорона праці
5.1 Небезпечні і шкідливі виробничі чинники, супроводжуючі роботу машиніста екскаватора
Охорона праці – це система законодавчих актів і відповідних їм соціально-економічних, гігієнічних і організаційних заходів, що забезпечують безпеку, збереження здоров'я і працездатності людини в процесі праці.
Задача охорони праці - звести до мінімальної вірогідності поразку або захворювання працюючого з одночасним забезпеченням комфорту при максимальній продуктивності праці. [8]
Небезпечний виробничий чинник - це виробничий чинник, дія якого на працюючого в певних умовах приводить до травми або іншого раптового погіршення здоров'я.
Шкідливий виробничий фактор - це виробничий чинник, дія якого на працюючого в певних умовах приводить до захворювання або зниження работоспособности.[9]
Всі небезпечні і шкідливі виробничі чинники, супроводжуючі роботу машиніста приведені в таблиці 5.1.
1) Перекидання екскаватора. Згідно теоремі Варіньена, тверде тіло може знаходиться в рівновазі, якщо сума моментів всіх сил щодо можливої опори перекидання Про буде рівна нулю, тобто Мо =0. З цього рівняння виходить, що момент сил перекидання щодо опори О, прагнучої перекинути машину, повинен рівний утримуючому моменту сил Муд. щодо тієї ж опори, тобто Мопр. =Муд .
Перекидаючі моменти в будівельних машинах складаються з дії різних сил: реакції грунту на ріжучі грані робочих органів землерийних машин, маси вантажів динамічних навантажень, дія вітру, сил інерції, мас вантажу і машини, сил, що виникають від ухилу або підйому шляху, і ін.
Таблиця 5.1
Небезпечні і шкідливі виробничі чинники, діючі на
машиніста екскаватора.
| № п/п |
Робоче місце |
Небезпечні і шкідливі виробничі чинники. |
Характеристика небезпечних і шкідливих виробничих чинників. |
Законодавчі акти регламентуючі безпечні і нешкідливі умови праці. |
| 1 |
Кабіна машиніста |
Перекидання екскаватора |
Впливає на перекидання екскаватора перекидаючий момент (маса робочого устаткування, маса вантажу, що піднімається); ухилом або підйомом, поперечним креном. |
ГОСТ 12.3.003-84 |
| 2 |
Безпосередньо у робочій зоні |
Попадання людини в зону роботи. |
Погана огорожа небезпечної зони; не проведений інструктаж з робітником, що знаходиться в робочій зоні. |
ГОСТ 12.3.009-76 ГОСТ 23407-78 |
| 3 |
Кабіна машиніста |
Підвищений рівень шуму |
Перевищення шуму (більше 85 д.БА); погана звукоізоляція кабіни; відсутність або несправний стан аеродинамічних показників. |
ГОСТ 12.1.003-83 |
| 4 |
Кабіна машиніста |
Підвищена вібрація. |
Відображається на вестибулярному апараті, серцево-судинній системі і викликають синдром заколисування; розладу шлунку, кишечника; погіршення зору, виникнення нудоти, блювоти. |
ГОСТ 12.1.012-78 |
| 5 |
Кабіна машиніста |
Запорошена |
Професійні захворювання: силікоз, каніоз, алюмікоз. |
ГОСТ 12.1.005-76 |
| 6 |
Кабіна машиніста |
Освітлення |
Неправильно виконане освітлення може з'явитися причиною травматизму; підвищує стомлюваність; знижує продуктивність. Не правильна експлуатація |
СН 81-80 ГОСТ 12.1.046-85 |
Утримуючий, або поновлюючий, момент, який повертає машину в стійке положення рівноваги, є дією сил від мас цієї машини і противаги. У випадках застосування теореми Варіньона до стійкості будівельних машин допускається виключити дію на них цих Сил (у зв'язку з деформацією конструкцій машини і податливістю підстави фундаменту), на якому вона працює. У тих випадках, коли ця деформація велика, а податливість підстави може зростати, подібне допущення виключається.
Оскільки визначити точно величину перекидаючого моменту не представляється можливим через непередбачені, іноді аварійні навантаження, в практиці застосовуються коефіцієнт запасу стійкості, характеризуючий вірогідність перевантаження:
Ку. =Муд. / Мопр.
Коефіцієнт стійкості визначають для наступних станів машини: робочого, неробочого, монтажного і транспортного.
Бульдозери, грейфери, скрепери, екскаватори і інші машини можуть втратити стійкість у випадках пересування з неприпустимим подовжнім ухилом або підйомом, поперечним креном, а також в робочому стані при дії навантажень, несприятливих для рівноваги.
2) Попадання людини в зону роботи.
При організації будівельного майданчика, розміщення ділянок і робочих місць, проїздів, проходів необхідно встановити небезпечні для людей зони. Під небезпечною зоною розуміють частину простору, в якій діють постійно або виникають періодично чинники, що створюють загрозу життя і здоров'ю працюючих людей. Небезпечні зони забезпечуються знаками безпеки і написами встановленої форми. Всі небезпечні для людей зони розділяються на дві групи:
I) Зони з постійно діючими небезпечними і виробничими чинниками;
II) Зони з потенційно діючими небезпечними виробничими чинниками.
До першої зони можна віднести зони поблизу неізольованих токоведучих частин електроустановок, ліній електропередач (ЛЕП); місця переміщення машин і устаткування, їх частин і робочих органів; місця виділення шкідливих небезпечних речовин, що перевищують ПДК, зони дії шуму з інтенсивністю вищі допустимою і Т.д. Виробництво будівельно-монтажних робіт в цих зонах, як правило, не допускається.
До другої групи можна віднести ділянки простору поблизу будівель, що будуються (підлягаючих розбиранню), споруд, а також ділянки, території, над якими ведуться монтажні роботи. Зони з постійно діючими виробничими чинниками щоб уникнути доступу сторонніх осіб повинні бути захищені огорожами (ГОСТ 23407-78), що запобігають доступу людей в небезпечну зону. Зони з потенційно діючими небезпечними виробничими чинниками захищаються сигнальними огорожами, застережливими про межі ділянок з небезпечними і шкідливими чинниками.
При виробництві будівельно-монтажних робіт в небезпечних зонах забезпечення безпеки робіт - задача першочергова.
3) Підвищений рівень шуму.
На будівельних майданчиках і підприємствах будівельної індустрії багатьом технологічним процесам супроводять шум і вібрація. Джерелами інтенсивного шуму і вібрації є машини і механізми з неврівноваженими масами, що обертаються, в окремих кінематичних парах в яких виникають тертя і зіткнення, а також технологічні установки і апарати, в яких рух газів і рідин відбувається з великими швидкостями і супроводжується пульсацією. До таких джерел шуму і вібрації відносяться компресори, насоси, елементи вентиляційних систем, трубопроводи для переміщення рідин, газів і пилу, різних дробильні і млинові установки, газодувки, електродвигуни і інше технологічне устаткування. У ряді випадків підвищені рівні шуму і вібрації є слідством відсутності або неправильного проектування - вібро і шумозахистних пристроїв, порушень правил експлуатації механічного устаткування, недостатнього динамічного балансування деталей, що обертаються, і ін. Основні джерела шуму і вібрації в будівництві і на заводах залізобетонних виробів можна об'єднати в наступні групи:
1)пересувні будівельні машини - екскаватори, бульдозери, катки, баштові, мостові і автомобільні крани, копрові установки з дизель - молотами і електровібраторами, пересувні компресорні установки;
2)машини для приготування, розподілу і віброущильненя бетонної суміші - бетонозмішувачі, дозаторні пристрої, віброформування багато пустотних виробів, касетні установки з навісними вібраторами і др.;
3)ручний механізований інструмент з електро і пневмоприводом.
Одним з найсприятливіших типів підприємств по віброакустичному режиму виробничих приміщень є заводи збірних залізобетонних конструкцій, в яких умови праці іноді не відповідають санітарним вимогам, особливо формувальні цехи. Основним технологічним устаткуванням формувальних цехів є віброплощадки, які служать джерелами шуму і шкідливої вібрації. Встановлено, що збільшення шуму з 76 до 95 дБ знижує продуктивність фізичної праці на 20-22%, а розумового - більш ніж на 40%. На віброплощадках шум досягається 105-120 дБ, Тобто перевищує норми на 20-35 дБ.
Підвищення рівня шуму і вібрації на робочих місцях несприятливо позначається на організмі людини і результатах його діяльності
4) Підвищена вібрація.
Тіло працюючої людини умовно розглядають як своєрідну систему, що коливається, оскільки під впливом вібрації частини тіла людини переміщаються щодо один одного з амплітудами залежно від джерела коливання і маси органів. Відносні переміщення частин тіла приводять до напруг в зв'язках між частинами тіла і взаємному зіткненню і натисканню.
Тривалі коливання людини з частотою f=3 ... 5 Гц шкідливо відображаються на вестибулярному апараті, серцево-судинній системі і викликають розлади унаслідок резонансних коливань голови, шлунку, кишечника і зрештою всього тіла. При частоті коливань f=11 ... 45 Гц погіршується зір, виникають нудота, блювота, порушується Нормальна діяльність інших органів. Коливання з частотою f>45 Гц викликають пошкодження судин головного мозку, відбувається розлад циркуляції крові і вищої нервової діяльності з подальшим розвитком вібраційної хвороби.
На заводах металоконструкцій при багатьох технологічних процесах (шліфовка, заточування інструменту, зачистка швів, зварка, різання і ін.) виділяється пил, що забруднює повітряне середовище, яке негативно впливає на організм людини і в основному на їх органи дихання, оскільки дихальні органи є основними шляхами проникнення в організм людини пилу з повітряного середовища.
Пил – це найдрібніші тверді частинки, здатні знаходитися в перебігу деякого часу в повітрі в зваженому стані. Зважені в повітрі тверді частинки є дисперсною системою, в якій дисперсною фазою є тверді частинки, а дисперсійним середовищем - повітря. Дисперсну систему зважених твердих частинок в повітрі, тобто пил називають аерозоллю.
Для оцінки пилу сточування зору гігієни найважливішою ознакою є ступінь її дисперсності або розміри пилових частинок, оскільки з цим пов'язана тривалість перебування зваженої пилової частинки в повітряному середовищі. Від дисперсності пилових частинок залежить також глибина їх проникнення в дихальні шляхи.
Швидкість осадження пилу з повітря знаходиться залежно від розміру частинок. Крупні частинки (більш lO MKM) відносно швидко випадають в осад під дією сили тяжіння, дрібніші частинки падають з меншими швидкостями, долаючи опір повітряного середовища (50…10MKM), а найдрібніші (менше 5 мкм) високодисперсні частинки можуть тривалий час знаходитися в повітрі. У легенях людини при диханні затримуються частинки розміром від 0,23до 7 мкм.
Таким чином, постійна робота на запорошених робочих місцях з часом пов'язана з професійними захворюваннями, званими пневмоконіозамі (силікозамі, коніози, алюмікози і т.д.).
5) Освітлення
Виробниче освітлення, правильно спроектоване і виконане, сприяє продуктивності праці, і якості продукції, що випускається, підвищує безпека праці і знижує стомлюваність і травматизм на виробництві.
Неправильно виконане освітлення може з'явитися причиною травматизму в результаті погано освітлених небезпечних зон, сліпучого дії ламп і відблисків від них, різких тіней, які можуть викликати повну втрату орієнтації працюючих.
Неправильна експлуатація освітлювальних установок, а також помилки, допущені при їх проектуванні і установці в будівлях з пожежо - і вибухо - небезпечними виробництвами, можуть привести до вибуху, пожежі і нещасних випадків.
Враховуючи те, що світло забезпечує зв'язок організму із зовнішнім середовищем і володіє високою біологічною і тонізуючою дією, до сучасного промислового освітлення пред'являються високі вимоги як гігієнічного, так і техніко-економічного характеру. (10)
5.2 Розробка інженерних рішень по обмеженню впливу небезпечних виробничих чинників на машиніста екскаватора
5.2.1 Небезпека перекидання
Стійкість екскаватора перевіряється по трьох розрахункових схемах.
а) Перше розрахункове положення (pиc.5.1).
Екскаватор знаходиться на горизонтальному майданчику, платформа упоперек ходової рами, стріла, на повному вильоті виробляється затискач вантажу.
Момент сил, що утримують екскаватор від перекидання, щодо т.О:
Муд = Gnn rnn. +Gхч. rхч ,
де Gnn. - вага поворотної платформи з механізмами;
Gхч. - вага ходової частини;
Муд. = 70720∙2,75+61750∙1,6= 293280 Нм.
5.1. Розрахунок стійкості при захопленні вантажу.
Момент перекидаючий:
Мопр = Gc rc. +Gис rис +Gизв rизв + Gз rз +Gцз rцз ;
де Gc - вага стріли; Gис - вага циліндра стріли; Gизв - вага циліндра затискач; Gз - вага затискач; Gцз - вага циліндра зіву.
Мопр =17900∙1,5+1180∙2∙9,15+1180∙4,25+18000∙5,5+3900∙6,5=156569 Нм.
Коефіцієнт стійкості:
К= Муд /Мопр =293280/156569=1,87.
К>1, екскаватор в цьому положенні стійкий.
б) Друге розрахункове положення (рис 6.2.).
Відповідає повороту на вивантаження, платформа упоперек рами, затискач на вильоті найбільшого радіусу.
Момент утримуючих сил:
Муд =Gпп rпп +Gхч rхч =70720∙2,75+61750∙1,6=293280 Нм;
Момент перекидаючий:
Мопр =Gc rc +Gис rис +Gизв rизв +Gз rз +Gиз rиз +Gг rг ,
де Gг – вага вантажу, що піднімається;
Мопр =17900∙1,5+1180∙2∙0,15+1180∙4,25+18000∙6,85+3900∙6,15+15000∙7,25=262254 Нм.
Коефіцієнт стійкості:
К=Муд /Мопр =293280/262254=1,118
К>1, тобто екскаватор стійкий.
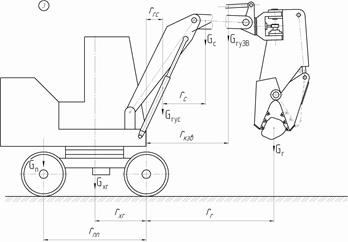
Рис.5.2. Розрахунок стійкості при повороті на вивантаження.
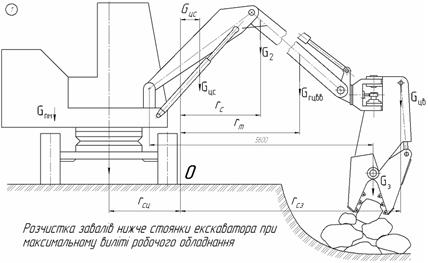
в) Третє розрахункове положення (рис.5.3.).
Відповідає руху екскаватора під уклон (α= 22°), стріла піднята до межі, затискач підвернуте під стрілу, тиск вітру у бік ухилу Рв =250 Н/м2 .
Момент утримуючий:
Муд =Gпп rпп +Gхч rхч =70720∙1,75+617501=195510 Нм.
Момент перекидаючий:
Мопр =Gис rис +Gc rc +Gизв rизв +Gз rз +Gиз rиз +Мв ,
де Мв – момент від сил вітру.
Мв = Рв Fg,
де F=7,975 м2 - площа підвітряна;
g=1,9 м - висота додатку сили вітру.
Мв =250∙7,975∙1,9=3788 Нм
Мопр =1180∙2∙1+17900∙2,75+1180∙5,5+18000∙6+3900∙6,75+3788=182188 Нм.
Коефіцієнт стійкості:
К=Муд /Мопр =195510/182188= 1,07
К>1, значит екскаватор устойчив. [3]

Рис.5.3 Розрахунок стійкості при пересуванні.
5.2.2 Попадання людини в зону роботи
Для того, щоб запобігти попаданню людини в зону роботи необхідно будувати загороди, встановлювати звукові сирени. робітники, які безпосередньо знаходяться в цих зонах повинні бути про інструктовані по техніці безпеки. Для того, щоб уникнути травматизму необхідне хороше освітлення робочої зони в темний час доби. На будмайданчиках робітники повинні бути в спецодягу і касках.
5.3 Розробка інженерних рішень по обмеженню дій шкідливих виробничих чинників на машиніста екскаватора
5.3.1 Підвищений рівень шуму
У тих випадках, коли джерело шуму не може бути усунений, ослаблений або захищений звукоізоляційною перешкодою, для боротьби з шумом використовують засоби звукопоглинання.
Звукопоглинання дає найбільшу ефективність в зоні відображеного звуку. Зменшення рівня звуку за рахунок звукопоглинання збільшується із зменшенням об'єму приміщень.
Звукопоглинальні облицьовування розміщують на стелі і на верхніх частинах стін. Максимальне звукопоглинання досягається при облицьовуванні не менше 60% загальної площі захищаючих поверхонь приміщень.
Розрахуємо звукопоглинальне облицьовування кабіни машиніста.
Визначимо ефективність її застосування і рівня звукового тиску на робочому місці після акустичної обробки кабіни. Розміри кабіни 1,5х1,8х1,5 м; об'єм кабіни V= 4,05 м3 ; площі захищаючих поверхонь, м підлоги - 2,7 м, стін - 2 м, стелі - 2,7 м, загальна площа S = 7,4 м.
Розрахункова точка видалення від двигуна r = 3м.
![]() ,
,
де n= 1 - кількість джерел звуку (двигун);
В8000 - постійна приміщення на частоті 8000Гц.
В8000 =B1000 µ8000 =6V/ 20=6∙4,05/20= 1/22
Розрахункова крапка знаходиться в зоні віддзеркалення, тобто r> rпр [11]
Аналіз спектру рівня звукового тиску на робочому місці показав, що вживаний матеріал повинен мати високий коефіцієнт звукопоглинання. Вибираємо для звукопоглинання плити «Вініпор» напівжорсткі (ТУ В-бб-70).
5.3.2 Вібрація
Буває два види захисту від вібрації: пасивна і активна віброізоляція.
Пасивна віброізоляція (віброзахист) - це віброізоляція, не використовуюча енергію додаткового джерела.
Розглянемо для прикладу віброїзоляцію сидіння водія. Сидіння в самохідних будівельне - дорожніх машинах, автомобілях і тракторах повинні забезпечувати санітарно - гігієнічні умови для тривалої - роботи водіїв. Сидіння повинне пом'якшувати поштовхи і удари і частину вібрації, перевищуючу гігієнічні характеристики і норми вібрації по ГОСТ 2.1.1012-78*.
Типова схема підресорювання сидіння водія (рис.5.2) складається з наступних елементів: направляючого механізму 1, корпусу водія, що складається з параллелограмних важелів і забезпечуючого стабільність вертикального положення, при коливанні машини. Направляючий механізм, що сполучає посадочне місце водія з рамою ходової частини ·машини, виконує роль кінематичного і силового зв'язку; пружини 3, знижуючої амплітуду коливань сидіння від коливання машини при пересуванні по нерівностях дорогі; регулювального гвинта 4 для зміни жорсткості пружини залежно від маси тіла водія; гидроамортизатора 2, поглинаючого коливання сидіння при пересуванні машини по нерівностях дорогі.
Під активною віброїзоляцією розуміють таку ізоляцію, для якої використовується енергія додаткового джерела.
Дослідження показали, що пасивна віброізоляція не дозволяє повністю захистити сидіння від вібрації, а дає можливість понизити тільки до 50%. Більш афектно понизити вібрацію можна методом противовібрації збуджуючи дії протифази, що задається сидінню сидячою системою. В цьому випадку вібраційний захист із зворотним зв'язком і додатковою енергією, що підводиться, називається активним віброізоляцією. Цей метод для самохідних машин знаходиться у стадії пошуку, має на меті понизити рівень коливань до заданих санітарних норм.
Активна віброізоляція, як правило, заснована на замкнутій системі автоматичного управління. Подібна система підресорювання сидіння показана на рис.5.3. Сидіння водія 1 під впливом коливання його підстави переміщається на величину х. Це переміщення за допомогою акселерометра 2 перетвориться в прискорення х. Поступаючий від акселерометра сигнал за допомогою золотника 3 фіксує зсув акселерометра щодо сидіння, а гідронасос 4 і гідроциліндр 5 впливають на сидінні, притягаючи або відштовхуючи його від підстави. При активній віброізоляції сидіння енергії витрачається 5 ... 6 кВт.
5.3.3. Запорошена. Методи очищення повітря від пилу
Для очищення повітря від пилу застосовують пиловловлювачі і фільтри.
До фільтрів відносяться пристрої, в яких відділення пилових частинок від повітря виробляється шляхом фільтрації через пористі матеріали. Апарати, засновані на інших принципах запалі відділення, прийнято називати пиловловлювачами.
Залежно від природи сил, діючих на зважені в газі пилові частинки для їх відділення від газового потоку, використовують наступні типи пиловловлюючих апаратів: сухі механічні пиловловлювачі (зважені частинки відділяються від газу за допомогою зовнішньої механічної сили); мокрі пиловловлювачі – (частинки відділяються від газу шляхом промивки його рідиною, захоплюючою ці частинки); електричні пиловловлювачі (частинки пилу відділяються від газового потоку під дією електричних сил); комбіновані пиловловлювачі (використовуються одночасно різні принципи очищення).
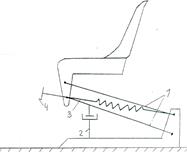
Рис. 5.2 Схема підресореного сидіння
По функціональному призначенню пиловловлююче устаткування підрозділяється на два види:
1)для очищення повітря приточування в системах вентиляція і кондиціонування;
2)для очищення повітря і газів, що викидаються в атмосферу системами промислової вентиляції.
При виборі засобів індивідуального захисту необхідно керуватися довідником - каталогом «Спецодяг, спецвзуття, засоби індивідуального захисту» ВЦНІІОТ.
Спецодяг повинен оберігати тіло працюючого від несприятливої дії механічних, фізичних і хімічних чинників зовнішнього середовища. Спецодяг, надійно захищає тіло від виробничих шкідливих речовин, повинен разом з тим забезпечувати свободу рухів, нормальну терморегуляцію організму і добре очищатися від забруднень, не змінюючи після цього своїх властивостей.
У будівництві найшкідливішими є пилові процеси при роботі з цементом, вапном і іншими. матеріалами, що порошать. Для захисту органів дихання застосовують різні види індивідуальних засобів захисту типу респіраторів. Респіратор є фільтром, розташованим на напівмасці, щільно прилеглим до особи і відділяючим від запорошеного середовища тільки органи дихання.
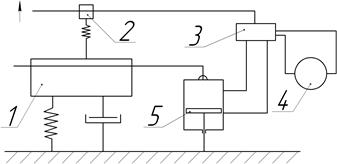
5.3 Схема активної віброїзоляциії
При виробництві будівельно-монтажних робіт, пов'язаних із значним запалі освітою, рекомендується застосовувати фільтруючі респіратори.
Для захисту органів дихання від вапняного, цементного і азбестового пилу застосовують респіратори типа PH-19. Для захисту від нетоксичного пилу використовують респіратори типа ШБ-l і ПPБ-l. Для захисту очей від пилу слід застосовувати спеціальні протипилові захисні окуляри.
5.3.4 Освітленість
Штучне електричне освітлення будівельних майданчиків і місць виробництва будівельних і монтажних робіт передбачається у тому випадку, коли недосить природного світла, або для освітлення в той годинник діб, коли природне світло відсутнє.
По конструктивному виконанню штучне освітлення може бути двох видів: загальне і комбіноване, коли до загального освітлення додається місцеве, що концентрує світловий потік безпосередньо на робочих місцях.
Загальне освітлення підрозділяється на загальне рівномірне освітлення (коли весь будівельний майданчик або приміщення освітлюється однотипними світильниками, рівномірно розташованими над поверхнею освітлюваного простору і забезпеченими лампами однакової потужності) і загальне локалізоване освітлення (при розподілі світлового потоку з урахуванням розташування робочих місць).
Застосування одного місцевого освітлення на будівельному майданчику і усередині виробничого приміщення не допускається.
Вибір системи освітлення залежить від вимог технологічного процесу, розмірів об'єктів розрізнення і характеру зорових робіт.
Для будівельних майданчиків і ділянок робіт необхідно передбачати загальне рівномірне освітлення. При цьому освітленість повинна бути не менше 2 лк незалежно від вживаних джерел світла. Для ділянок робіт, де нормовані рівні освітленості повинні бути більше 2 лк, на додаток до загального рівномірного освітлення слід передбачати загальне локалізоване, яке виконують освітлювальними приладами, встановлюваними на будівлях, конструкціях і щоглах загального рівномірного освітлення (рис.5.4).
Загальне локалізоване освітлення створюється освітлювальними приладами – фарами, прожекторами або світильниками, встановлюваними на машинах і механізмах. По функціональному призначенню електричне освітлення будівельних майданчиків і ділянок підрозділяється на робоче, аварійне, евакуаційне і спеціальне.
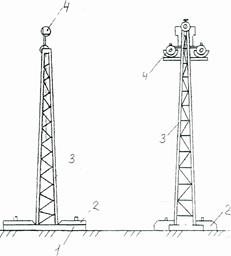
5.4 Інверторная прожекторна щогла
Спроектуємо загальне рівномірне освітлення для будівельного майданчика, що має розміри 200х150.
Відповідно до ГОСТ 12.1.046-85. Ен =2 лк.; к=1,7. Беремо прожектор ПЗС-45 з лампою ДРЛ-700, Imax = 30000; βΒ = 2; β1 = 100; Рл = 700
Тоді N= m∙Ен ∙А/Рл = 0,13•1,7•2•30000/700 = 18,9 шт.
А - освітлювальний майданчик, м2 А= 30000. Приймаємо число прожекторів N= 20 шт. Максимальна висота установки прожекторів:
Нmin
=![]()
Число прожекторів на одній щоглі приймаємо 5 шт. Кут нахилу рівний Θ=15°.
Кожну прожекторну щоглу встановлюємо посередині сторін майданчика.[ll]
5.4 Віддзеркалення питань ергономіки при розробці робочого місця машиніста екскаватора
Ергономіка – наукова дисципліна, що вивчає функціональні можливості людини у важких процесах, виявляє можливості і закономірності створення оптимальних умов для високопродуктивної праці і забезпечення необхідних зручностей, сприяючих розвитку здібностей людини. Її предметом є трудова діяльність, а об'єктом дослідження - системи «людина - знаряддя - предмет праці - виробниче середовище». Оптимізація названих систем розглядається як знаходження якнайкращого, зі всіх можливих для певних умов і способу, функціонування систем, ефективність яких оцінюється не тільки з техніко-економічною, але і з погляду збереження здоров'я працюючого.
Оптимізація трудової діяльності і умови здійснення створює необхідні передумови для збереження здоров'я працюючих, дозволяє добитися підвищення ефективності і надійності діяльності людини.
Ергономіка – це наука про пристосування умов праці до людини. вона так чи інакше пов'язана зі всіма науками, предметом дослідження яких є людина. За природою своєї ергономіка займається профілактикою охорони праці. Комплексний підхід, характерний для ергономіки, дозволяє одержати всестороннє уявлення про трудовий процес. Саме ця сторона ергономічних досліджень є цінністю для наукової організації праці.
Ергономіка вирішує також ряд проблем, поставлених в будівництві: оцінка надійності, точності і стабільності роботи оператора, дослідження впливу психічної напруженості, ступеня стомлюваності, емоційних чинників і особливостей нервнопсихічної організації оператора на ефективність його діяльності в системі «людина-машина», вивчення приспособлювальних і творчих можливостей людини.
У сучасному будівельному виробництві, оснащеному технічними системами, до людини пред'являються різко збільшені вимоги, що вимушують його працювати на межі психофізіологічних можливостей і в украй ускладнених умовах. Можливості будівників розширяються за рахунок розвитку будівельної техніки. З розвитком техніки виникла задача узгодження конструкцій машин і умов їх функціонування з характеристиками працюючої людини, технічний прогрес поставив проблему «людина-машина».
Ергономіка дозволила відповісти на практичні питання, що виникають. при організації спільної роботи людини, з одного боку, і механізмом елементів матеріальної сфери - з іншою. Ця наука вивчає суперечності, що виникають між людиною і матеріальними «партнерами» в праці, причому ці суперечності є результатом взаємної непристосовності машин і механізмів до людини і людини до них.
Ергономіка органічно пов'язана з художнім конструюванням (дизайном), метою якого є формування гармонійного і наочного середовища, що відповідає матеріальним і духовним особливостям людини.
5.5 Протипожежна безпека
У звичних умовах горіння є процесом окислення або з'єднання гарячої речовини і кисню повітря. Проте відомо, що деякі речовини, наприклад стислий ацетилен, хлористий азот, вибухові речовини можуть горіти, вибухати без кисню з результатом не тільки реакції з'єднання, але розкладання.
Горінням називають швидко протікаючу хімічну реакцію, що супроводжується виділенням великої кількості тепла і звично свіченням. Залежно від швидкості процесу горіння може відбуватися у формі власне горіння, вибуху і детонації.
Найбільша швидкість горіння спостерігається в чистому кисні, якнайменша – при змісті в повітрі 14-15% (про.) кисню. При подальшому зменшенні змісту кисню горіння більшої частини речовин - припиняється. Воно відбувається тим швидше, чим більше питома поверхня речовин; при ретельному зсуві горючої речовини і кисню (окислювача) збільшується швидкість горіння.
Всяку пожежу найлегше ліквідовувати в його початковій стадії, вживши заходи до локалізації вогнища, щоб не допускати збільшення площі горіння. Успіх швидкої локалізації і ліквідації пожежі в його початковій стадії залежить від наявних відповідних вогнегасних засобів, уміння користуватися ними всіма працюючими, а також від засобів пожежного зв'язку і сигналізації для виклику пожежної допомоги і приведення в дію автоматичних і ручних вогнегасних засобів.
Огнетушащие властивості води. Вода в порівнянні з іншими вогнегасними речовинами має найбільшу теплоємність і придатна для гасіння більшості горючих речовин: 1л води при нагріванні від 0 до 100 °З поглинає 419 кДж теплоти, а при випаровуванні - 2260 кДж. Вода володіє достатньою термічною стійкістю (понад 17000 З), що перевищує стійкість багатьох інших вогнегасних речовин. Крім того, вода володіє трьома властивостями вогнетушіння: охолоджує зону горіння або речовини, що горять, розбавляє реагуючі речовини в зоні горіння і ізолює гарячі речовини від зони горіння.
Огнетушащие піни. Для гасіння легкозаймистих рідин застосовують піну - суміш газу з рідиною.
Піна є системою, в якій дисперсною фазою завжди є газ. Міхури газу можуть утворюватися усередині рідини в результаті хімічних процесів або механічного зсуву газу (повітря з рідиною). Чим менше розміри міхурів газу і поверхнева напруга плівки рідини, тим більше стійка піна (менша можливість руйнування плівки).
При невеликій густині (0.1-0.2 г/см) піна розтікається по поверхні горючої рідини, ізолює її від полум'я, і надходження пари в зону горіння припиняється; одночасно охолоджується поверхня рідини.
6. Розрахунок річного економічного ефекту
6.1 Виявлення призначення і області застосування нової техніки
Нова техніка - гідравлічний екскаватор ЕО-4321 з робочим устаткуванням затискач. Ця техніка призначена для виконання відновних робіт. До цих робіт відноситься розчищання завалів будівель, руйнування стін, що залишилися, з подальшим вантаженням в транспортний засіб. Тобто дана машина використовується при надзвичайних ситуаціях. [12]
6.2 Вибір базового варіанту
Вибираємо базову техніку Е0-4321 з робочим устаткуванням гідромолот, для порівняння з новою технікою.
6.3 Виявлення конструктивне - експлуатаційних особливостей техніки
До конструктивно - експлутаційним особливостям нової техніки відносяться: здатність роботи екскаватора в обмежених умовах за рахунок повороту затискач в діапазоні 0° ... 180°, тобто поворотна платформа нерухома; для руйнування дорожніх покриттів, стін, перекриттів гідромолот необхідно вдавлювати в руйнований предмет, а нова техніка руйнує без цих додаткових навантажень; здатність виконувати навантажувально-розвантажувальні роботи.
6.4 Опис програми «Ефект-М»
6.4.1 Ідентифікатори для опису початкової інформації до програми «Ефект - М »
Таблиця 6.1
Ідентифікатори для опису початкової інформації до програми
«Ефект - М»
| № п/п |
Параметри |
Од. вим. |
Програм. ідентиф. |
| 1 |
2 |
3 |
4 |
| 1 |
Ціна техніки |
грн |
СС |
| 2 |
Маса техніки |
Т |
G |
| 3 |
Річна експлуатаційна продуктивність |
Кг/рік |
У |
| 4 |
Термін служби техніки |
років |
TCL |
| 5 |
Тариф на залізничні перевезення |
Грн/т |
GP |
| 6 |
Норма амортизаційних відрахувань |
Часток |
BNAO |
| 7 |
Коефіцієнт, що враховує витрати на зміст дорогий |
KSD |
|
| 8 |
Коефіцієнт, що враховує доплати |
KG |
|
| 9 |
Кількість відпрацьованого годинника в рік |
година |
TE |
| 10 |
Годинна тарифна ставка всього екіпажа |
Грн/година |
SUMCT |
| 11 |
Коефіцієнт накладних витрат від решти статі витрат на експлуатацію машини |
KHII |
|
| 12 |
Ціна палива |
Грн/кг |
СТОІІ |
| 13 |
Нормальна потужність ДВС |
кВт |
BNEH |
| 14 |
Питома витрата палива |
г/кВт•час |
GEN |
| 15 |
Коефіцієнт, що враховує зміну витрати палива від ступеня використовування двигуна по потужності |
KN |
|
| 16 |
Коефіцієнт використовування машини по потужності |
KDM |
|
| 17 |
Коефіцієнт використовування машини за часом |
KDV |
|
| 18 |
Стійка потужність електродвигунів |
кВт |
BNM |
| 19 |
ККД мережі |
KPS |
|
| 20 |
ККД двигуна |
||
| 21 |
Тариф на електроенергію |
Грн/кВт∙год |
|
| 22 |
Коефіцієнт, що враховує витрати на змащувальні і обтиральні матеріали |
КОМ |
|
| 23 |
Міжремонтний цикл |
Маш. год. |
ТC |
| 24 |
Коефіцієнт накладних витрат від основної зарплати екіпажа |
KHZ |
|
| 25 |
Коефіцієнт, що враховує премії ремонтних робітників |
LAMP |
|
| 26 |
Середня тарифна ставка робітників по ремонту машин |
Грн |
СР |
| 27 |
Кількість ТР за МРЦ |
АТ |
|
| 28 |
Кількість ТЕ-3 за МРЦ |
АТО3 |
|
| 29 |
Кількість ТЕ-2 за МРЦ |
АТО2 |
|
| 30 |
Кількість ТЕ-1 за МРЦ |
АТО1 |
|
| 31 |
Трудомісткість ТР |
Чел•ч |
RTP |
| 32 |
Трудомісткість ТЕ-3 |
Чел•ч |
RTО3 |
| 33 |
Трудомісткість ТЕ-2 |
Чел•ч |
RTО2 |
| 34 |
Трудомісткість ТЕ-1 |
Чел•ч |
RTО1 |
| 35 |
Коефіцієнт переходу від зарплати до витрат на ТЕ і ТР |
КЕР |
|
| 36 |
Оптова ціна шини |
Грн |
OCS |
| 37 |
Кількість шин (без запасних) |
Шт. |
BNS |
| 38 |
Термін служби шини |
Годин |
TS |
| 39 |
Місткість гідросистеми |
Літрів |
VG |
| 40 |
Об'ємна маса в гідросистемі |
Кг/дм |
GAM |
| 41 |
Оптова ціна масла для гідросистеми |
Грн/кг |
СМ |
| 42 |
Коефіцієнт доливань масла в гідросистему |
BKDL |
|
| 43 |
Періодичність зміни масла в гідросистемі |
годин |
TMG |
| 44 |
Частки відрахувань від балансової вартості на реновацію техніки |
Р |
|
| 45 |
Нормативний коефіцієнт економічної ефективності |
EN |
6.4.2 Ідентифікатори для опису розрахункових величин
Таблиця 6.2.
Ідентифікатори ДЛЯ опису розрахункових величі
| № п/п |
Параметри |
Одиниця вимірювання |
Програмний ідентифікатор |
| 1 |
2 |
3 |
4 |
| 1 |
Одноразові витрати |
Грн |
ES |
| 2 |
Амортизаційні відрахування на капремонт |
Грн |
АМК |
| 3 |
Річні поточні експлуатаційні витрати |
Грн |
ТР |
| 4 |
Заробітна платня робітників, що управляють машиною |
Грн |
SZII |
| 5 |
Вартість палива |
Грн |
ST |
| 6 |
Годинна витрата палива |
Г/час |
WT |
| 7 |
Вартість електроенергії |
Грн |
SE |
| 8 |
Вартість обтиральних і змащувальних матеріалів |
Грн |
SCM |
| 9 |
Витрати на ТЕ і ТР |
Грн |
SEP |
| 10 |
Витрати на зарплату ремонтних робітників |
Грн |
SEPZ |
| 11 |
Витрати на матеріали і витрати |
Грн |
SEPM |
| 12 |
Вартість змінного оснащення |
Грн |
SCO |
| 13 |
Витрати на масло для гідросистеми |
Грн |
SMG |
| 14 |
Річні експлуатаційні витрати споживачу |
Грн |
U |
| 15 |
Річний економічний ефект |
Грн |
EG |
6.4.3 Блок - схема програми «Еффект - М»
![]()
![]()
Початкові дані для розрахунку.
Базова машина.
| СС 121000 |
G 19,76 |
У 12563,2 |
TCL 8 |
BNAO 0,03 |
TG 2080 |
Стоп 1,12 |
||
| BNEN 70 |
QEH 252 |
BNМ 0 |
ТE 0 |
ТС 5760 |
СР 310 |
АТ 8 |
АТО3 0 |
|
| АТ02 18 |
АТ01 72 |
RTP 610 |
RT03 0 |
RT02 9 |
RTOl 4 |
OCS 1098 |
BNS 6 |
|
| TS 7000 |
VG 150 |
BКDL 1,5 |
TMG 1500 |
Р 0,08 |
GP 30 |
SUМCT 2,8 |
GAМ 0,86 |
CM 1,55 |
Нова машина
| СС 120000 |
G 19,76 |
V 19385,6 |
TCL 8 |
BNAO 0,03 |
TG 2080 |
Стоп 1,12 |
||
| BNEN 70 |
QEH 252 |
BNМ 0 |
ТІ 0 |
ТС 5760 |
СР 310 |
АТ 8 |
АТО3 0 |
|
| АТ02 18 |
АТ01 72 |
RTP 610 |
RT03 0 |
RT02 9 |
RT01 4 |
OCS 1098 |
BNS 6 |
|
| TS 7000 |
VG 150 |
BКDL 1,5 |
TMG 1500 |
Р 0,08 |
GP 30 |
SUМCT 2,8 |
GAМ 0,86 |
СМ 1 55 |
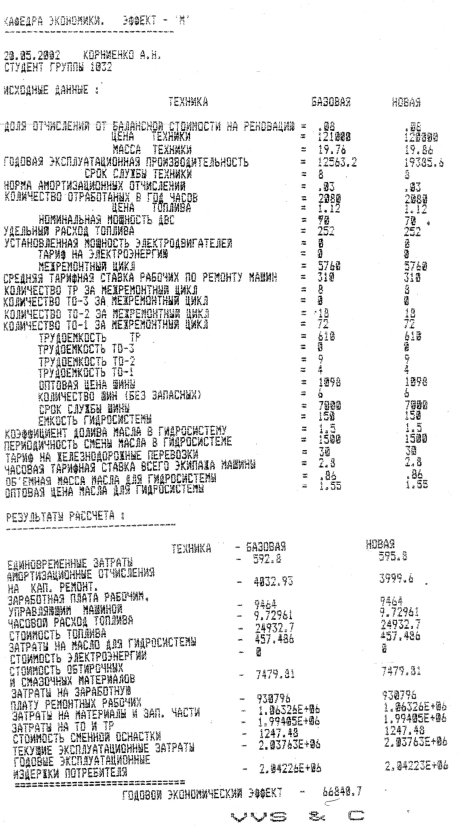
Висновок:
В результаті упровадження нової техніки одержали річний економічний ефект рівний 66840,7 гривень. Тобто використовувати робоче устаткування затискач на базі гідравлічного екскаватора Э0 - 4321 економічно вигідніше, ніж гідромолот.
Роздрук з кафедри економіки.
Висновки
В результаті дипломного проекту був розроблений робочий орган затискач для гідравлічного екскаватора Э0-4321, на підставі чого можна зробити ряд висновків.
В даний час відносне мало робітників органів для гідравлічних екскаваторів, які дозволяють виробляти роботи в обмежених умовах, тобто виконувати поставлену задачу без повороту поворотної платформи, а тільки за допомогою робочого органу.
Достатня простота конструкції забезпечує розширення можливостей екскаватора. Затискач дозволяє виконувати наступні операції:
Розчищання завалів, як на рівні стоянки екскаватора, так і нижче за рівень;
Руйнування бетонних і цегляних стін будівель з подальшим вантаженням частин в транспортний засіб;
Маніпулювання вантажем.
При достатньо широкій номенклатурі виконуваних робіт і частої їх повторюваності, коли потрібне швидке переналагодження робочого устаткування з одного функціонального типу в іншій. Тобто адаптація до різних видів робіт і властивостей середовища, екскаватори, оснащення робочим органом затискач, володіють істотними перевагами в порівнянні з устаткуванням традиційного типу.
У дипломному проекті виконані розрахунки: металоконструкцій робочого органу; гідроприводу; річного економічного ефекту; охорона праці.
Застосування робочого органу затискач на екскаватор ЕО-4321, для виконання різних видів робіт дає можливість підвищити продуктивність екскаватора з 12563,2 м/рік і дало річний економічний ефект в розмірі: 66840,7 гривень.
Список використаної літератури
1.А.Б. Голышев, В.Я. Бачинский «Проектирование железобетонных конструкций», - Киев: Строитель, 1985. - 496с.
2.ЦНИИСК им. В.А. Кучеренко Госстрой СССР СниП ІІ – 22-81. Строительные нормы проектирования. Чсть ІІ. Нормы проектирования. Глава 22. Каменные и армокаменные конструкции. - М.: Стройиздат, 1983. - 39с.
3.Л.А. Хмара, М.И. Деревенчук, И.А. Кулик. Методические указания к выполнению курсового проекта «Одноковшовые гидравлические экскаваторы» по дисциплине «Машины для земляных работ» для студентов механических специальностей. – Днепропетровск: ДИСИ. 1989. – 64с.
4.В.Д. Шевченко. Проектирование металлических конструкций строительных и дорожных машин. К: Вища школа, 1982. – 166 с.
5.А.В. Александров, В.Д, Потапов, Б.П. Державин. Сопротивление материалов. - М: высшая школа, 1995. – 560 с.
6. Гидравлический экскаватор Э0-4321. Техническое описание и инструкция по эксплуатации. - М: Machinoexport. - 222с.
7.А.В. Перекрёстов. Методические указания к выполнениюгидроприводы» для студентов специальности 15.04 заочной формы обучения. - Днепропетровск: ДИСИ, 1990. - 44с.
8. Г.Г. Орлов. Охрана труда в строительстве. - М: Высшая Школа, 1984. - 343с.
9. В.В. Сафонов, Л.М. Диденко. Охрана труда при изготовлении металлических конструкций. - Ленинград: Стройиздат, 1990. - 285с.
10. Б.И. Филиппов. Охрана труда при эксплуатации строительных машин. - М: Высшая школа, 1984. - 247с.
11.В.И. Русин, Г.Г. Орлов, Н.М. Неделько и др. Охрана труда в строительстве. Инженерные решения. - К: Будiвельник, 1990. – 208 с.
12.К.А. Иванов, С.В. Петров. Инструктивные материалы для выполнения расчетов на IBM в лабораторных работах и экономической части дипломных проектов студентам специальностей 15.04 и 21.03. - Днепропетровск: ДИСИ, 1989. - 18с.
13.Спецификации.