| Похожие рефераты | Скачать .docx |
Дипломная работа: Внедрение системы спутникового мониторинга транспорта на примере организации
1. Спутниковые системы радиоместоопределения
1.1 Ретроспективный анализ систем радиоместоопределения
1.2 Оптимальная структура спутниковых систем местоопределения автотранспорта
1.3 Анализ систем мониторинга автотранспорта GSM и Глонасс
2. Спутниковая радионавигационная система Глонасс
2.2 Особенности использования Глонасс на транспорте
3. Расчет производственной программы ГУП РМЭ "Пассажирские перевозки"
3.1 Общая характеристика ГУП РМЭ "Пассажирские перевозки"
3.2 Расчет основных показателей работы подвижного состава
5.1 Организационно-правовые основы охраны труда
6. Технико-экономическое обоснование проекта
6.1 Основные понятия инвестиционной деятельности
6.2 Определение стоимости комплекса мероприятий по внедрению системы мониторинга
6.3 Расчет экономической эффективности
Список используемой литературы
Введение
На данном этапе развития мировой экономики автомобильный транспорт для большинства стран является основным видом внутреннего транспорта и ключевым элементом транспортной системы. В России автомобильный транспорт сильно влияет на развитие социально-экономической сферы. Автомобильному транспорту нет адекватной замены при перевозке на средние и малые расстояния или, например, пассажирских перевозок в пределах населенного пункта.
Процесс автомобилизации нашей страны не должен ограничиваться только увеличением парка автомобилей, он так же вызывает необходимость решения ряда вопросов, направленных на дальнейшее развитие материально-технической базы и повышения эффективности эксплуатации.
Задача повышения эффективности капитальных вложений и снижения издержек является частью проблемы рациональной организации автомобильного транспорта и охватывает широкий круг эксплуатационных и технологических вопросов. Решение этой задачи обеспечивается в первую очередь качественным управлением производственным процессом, которое в значительной мере предопределяет рациональное использование основных фондов и высокую эффективность капитальных вложений.
В настоящее время появились новые, современные возможности контролировать и планировать деятельность АТП, доступные широкому кругу пользователей автоматизированные системы мониторинга автотранспорта способны обеспечить выполнение самых разных задач в режиме реального времени.
Управление транспортом в режиме он-лайн, дает уникальную возможность всегда иметь точную и достоверную информацию о реальном местоположении и маршрутах движения транспорта. Появляется возможность сверить маршрутные листы с реальным маршрутом отображаемым на географической карте, с отчетом на котором перечислены точки маршрута, либо с полным списком пройденных адресов. Можно легко сделать выводы о нецелевом использовании транспортных средств, принадлежащих компании (доставка "левых" грузов, отклонение от маршрутов, использование служебного транспорта в личных целях), или о кражах и повреждении груза, топлива.
Этих и других возможностей позволяет достичь использование глобальных навигационных систем "WEB-GPS/GSM-Глонасс/GSM".
Целью написания дипломного проекта является разработка плана мероприятий по повышению эффективности функционирования АТП ГУП РМЭ "Пассажирские перевозки" путем внедрения системы мониторинга "WEB-GPS/GSM-Глонасс/GSM".
1. Спутниковые системы радиоместоопределения
1.1 Ретроспективный анализ систем радиоместоопределения
Спутниковые системы радиоместоопределения - сравнительно новая, быстро развивающаяся ветвь навигации или отслеживания перемещения подвижных объектов.
Развитие отечественной спутниковой радионавигационной системы (СРНС) ГЛОНАСС имеет уже практически сорокалетнюю историю, начало которой положено, как чаще всего считают, запуском 4 октября 1957 г. в Советском Союзе первого в истории человечества искусственного спутника Земли (ИСЗ). Измерения доплеровского сдвига частоты передатчика этого ИСЗ на пункте наблюдения с известными координатами позволили определить параметры движения этого спутника.
Эффект Допплера (по имени австрийского физика К. Допплера) состоит в изменении регистрируемой приемником частоты колебаний или длины волны при относительном движении приемника и источника этих колебаний.
Обратная задача была очевидной: по измерениям того же доплеровского сдвига при известных координатах ИСЗ найти координаты пункта наблюдения. В то же время первое научно обоснованное предложение об использовании ИСЗ для навигации родилось в Ленинграде еще до запуска первого советского ИСЗ, в период проведения под руководством проф.В.С. Щебшаевича в Ленинградской военно-воздушной инженерной академии им. А.Ф. Можайского в 1955-1957 гг. исследований возможностей применения
радиоастрономических методов для самолетовождения. Материалы исследований докладывались в октябре и декабре 1957 г. на межведомственной конференции и семинаре.
Научные основы низкоорбитальных СРНС были существенно развиты в процессе выполнения исследований по теме "Спутник" (1958-1959 гг.), которые осуществляли Институт теоретической астрономии АН СССР, Институт электромеханики АН СССР, два морских НИИ и Горьковский НИРФИ. Работы проводились с участием крупных специалистов по аналитической механике и расчетам орбит. Основное внимание при этом уделялось вопросам повышения точности навигационных определений, обеспечения глобальности, круглосуточности применения и независимости от погодных условий.
Проведенные работы позволили перейти в 1963 г. к опытно-конструкторским работам над первой отечественной низкоорбитальной системой, получившей в дальнейшем название "Цикада".
"Цикада" в составе 4-х навигационных спутников (НС), выведенных на круговые орбиты высотой 1000 км, наклонением 83° и равномерным распределением плоскостей орбит вдоль экватора. Она позволяет потребителю в среднем через каждые полтора-два часа входить в радиоконтакт с одним из НС и определять плановые координаты своего места при продолжительности навигационного сеанса до 5...6 мин.
В ходе испытаний было установлено, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутниками собственных эфемерид, которые определяются и закладываются на спутники средствами наземного комплекса управления. Поэтому наряду с совершенствованием бортовых систем спутника и корабельной приемоиндикаторной аппаратуры, разработчиками системы серьезное внимание было уделено вопросам повышения точности определения и прогнозирования параметров орбит навигационных спутников.
Была отработана специальная схема проведения измерений параметров орбит средствами наземно-комплексного управления, разработаны методики прогнозирования, учитывающие все гармоники в разложении геопотенциала.
Большой вклад в повышение точности эфемерид навигационных спутников внесли результаты работ по программе геодезических и геофизических исследований с помощью специальных геодезических спутников "Космос-842" и "Космос-9П", которые были выведены на навигационные орбиты.
Это позволило уточнить координаты измерительных средств и вычислить коэффициенты согласующей модели геопотенциала, предназначенной специально для определения и прогнозирования параметров навигационных орбит. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок и составляет в настоящее время на интервале суточного прогноза величину " 70...80 м, а среднеквадратическая погрешность определения морскими судами своего местоположения уменьшилась до 80...100 м.
Для оснащения широкого класса морских потребителей разработаны и серийно изготавливаются комплектации приемоиндикаторной аппаратуры "Шхуна" и "Челн". Последняя имеет возможность работы и по спутникам американской радионавигационной системы "Транзит".
В дальнейшем спутники системы "Цикада" были дооборудованы приемной измерительной аппаратурой обнаружения терпящих бедствие объектов, которые оснащаются специальными радиобуями, излучающими сигналы бедствия на частотах 121 и 406 Мгц. Эти сигналы принимаются спутниками системы "Цикада" и ретранслируются на специальные наземные станции, где производится вычисление точных координат аварийных объектов (судов, самолетов и др.).
Дооснащенные аппаратурой обнаружения терпящих бедствие спутники "Цикада" образуют системы "Коспас". Совместно с американо-франко-канадской системой "Сарсат" они образуют единую службу поиска и спасения, на счету которой уже несколько тысяч спасенных жизней.
Успешная эксплуатация низкоорбитальных спутниковых навигационных систем морскими потребителями привлекла широкое внимание к спутниковой навигации. Возникла необходимость создания универсальной навигационной системы, удовлетворяющей требованиям всех потенциальных потребителей: авиации, морского флота, наземных транспортных средств и космических кораблей.
Выполнить требования всех указанных классов потребителей низкоорбитальные системы в силу принципов, заложенных в основу их построения, не могли. Перспективная спутниковая навигационная система должна обеспечивать потребителю в любой момент времени возможность определять три пространственные координаты, вектор скорости и точное время. Для получения потребителей трех пространственных координат беззапросным методом требуется проведение измерений навигационного параметра не менее чем до четырех спутников, при этом одновременно с тремя координатами местоположения потребитель определяет и расхождение собственных часов относительно шкалы времени спутниковой системы.
Исходя из принципа навигационных определений, выбрана структура спутниковой системы, которая обеспечивает одновременную в любой момент времени радиовидимость потребителей, находящимся в любой точке Земли, не менее четырех спутников, при минимальной общем их количестве в системе. Это обстоятельство ограничило высоту орбиты навигационных спутников 20 тыс. км, (дальнейшее увеличение высоты не ведет к расширению зоны радиообзора, а, следовательно, и к уменьшению необходимого количества спутников в системе). Для гарантированной видимости потребителем не менее четырех спутников, их количество в системе должно составлять 18, однако оно было увеличено до 24-х с целью повышения точности определения собственных координат и скорости потребителя путем предоставления ему возможности выбора из числа видимых спутников четверки, обеспечивающей наивысшую точность.
Одной из центральных проблем создания спутниковой системы, обеспечивающей беззапросные навигационные определения одновременно по нескольких спутникам, является проблема взаимной синхронизации спутниковых шкал времени с точностью до миллиардных долей секунды (наносекунд), поскольку рассинхронизация излучаемых спутниками навигационных сигналов вызывает дополнительную погрешность в определении местоположения потребителя до 10...15 м.
Проблемой создания высокоорбитальной навигационной системы является высокоточное определение и прогнозирование параметров орбит навигационных спутников.
Достижение необходимой точности эфемерид навигационных спутников потребовало проведения большого объема работ по учету факторов второго порядка малости, таких как световое давление, неравномерность вращения Земли и движение ее полюсов, а также исключение действия на спутник в полете реактивных сил, вызванных негерметичностью двигательных установок и газоотделением материалов покрытий. Для экспериментального определения параметров геопотенциала на орбиты навигационных спутников были запущены два пассивных ИЗС "Эталон" ("Космос-1989" и "Космос-2024"), предназначенных для измерения параметров их движения высокоточными квантово-оптическими измерительными средствами. Благодаря этим работам достигнутая в настоящее время точность эфемерид навигационных спутников при прогнозе на 30 ч составляет: вдоль орбиты - 20 м; по бинормали к орбите - 10 м; но высоте 5 м (СКО).
Летные испытания высокоорбитальной отечественной навигационной системы, получившей название ГЛОНАСС, были начаты в октябре 1982 г. запуском спутника "Космос-1413".
В настоящее время, из анализа выступлений некоторых руководителей и высокопоставленных чиновников можно заключить, что они не располагают достоверными данными о проблемах ГЛОНАСС, путях и сроках их решения. Так в марте 2006 года НПО прикладной механики (основной разработчик навигационных космических аппаратов) опубликовало следующий план по производству и запуску модернизированных КА "ГЛОНАСС-М" с гарантированным сроком функционирования на орбитах не менее 7 лет: в 2006 г. - 3 КА, в 2007 и 2008 гг. - по 6 КА, в 2009 г. - 3 КА. С 2010 г. предполагается пополнение орбитальной группировки аппаратами последующей модификации "ГЛОНАСС-К" с гарантийным сроком функционирования не менее 10 лет.
14 июля 2006 г. было подписано постановление правительства РФ о корректировке Федеральной целевой программы ГЛОНАСС, где в дополнение к плану НПО ПМ предусмотрен запуск в 2009 г. не трех, а шести КА.
При условии выполнения постановления правительства, к концу 2007 года на орбитах должно функционировать 17 КА. Из них: 13 КА "ГЛОНАСС-М" и, возможно, 4 КА "ГЛОНАСС" первой модификации, а к началу 2010 года орбитальная группировка (ОГ) может быть доведена до 25 КА "ГЛОНАСС-М".
Но этого количества КА для надежного решения задач Минобороны недостаточно. Дело в том, что в период эксплуатации спутниковых систем позиционирования (ГЛОНАСС, GPS) наземные комплексы управления вынуждены периодически выводить часть КА из состава ОГ на плановое и неплановое обслуживание. К сожалению, на данном этапе количество выводимых КА из состава ОГ ГЛОНАСС велико. Например, случайная выборка: 7 октября 2006 г. из состава ОГ, включающей 16 КА, функционировало только 10 КА, а 16 декабря - 11 КА. В период 1994-1995 гг., по официальным данным, ОГ ГЛОНАСС составляла 24 КА. Фактически ни одного дня ОГ не функционировала в полном составе. Поэтому необходимо на каждой из трех орбит ГЛОНАСС иметь 1-2 запасных КА.
Исходя из этого, есть необходимость обеспечить запуск в 2008 и 2009 гг. по 8 КА "ГЛОНАСС-М". Тогда к началу 2010 года ОГ ГЛОНАСС составит 29 аппаратов, что обеспечит возможность постоянного функционирования на орбитах 24 КА. Считаю этот план реальным. Подтверждением этого можно считать заявления в СМИ генерального конструктора и руководителя НПО ПМ Н.А. Тестоедова о четкой и активной работе по производству КА и заявление руководителя Роскосмоса А.Н. Перминова о возможности заключения соглашения с Индией об использовании индийских ракетоносителей для дополнительных запусков КА для восполнения ОГ ГЛОНАСС.
Следует отметить, что ОГ GPS составляет 29-30 КА, такой же состав ОГ планируется на европейской системе "Галилео" и китайской "Бэйдоу".
В связи с увеличением состава КА на орбитах, крайне необходимо развитие и совершенствование всего комплекса технических средств, наземных измерительных пунктов и Центра управления космических войск с целью обеспечения надежного и своевременного обслуживания навигационных КА и контроля целостности орбитальной группировки ГЛОНАСС.
25 декабря 2005 с космодрома "Байконур" на орбиту ракетой-носителем "Протон-К" были запущены один спутник "ГЛОНАСС" и два спутника "ГЛОНАСС-М" с увеличенным ресурсом эксплуатации.
26 декабря 2006 состоялся вывод на орбиту ракетой-носителем "Протон-К" трех спутников "ГЛОНАСС-М".
26 октября 2007 ракета-носитель "Протон-К" стартовал с "Байконура" и вывела на околоземную орбиту три модифицированных спутника "ГЛОНАСС-М".
25 декабря 2007 с космодрома "Байконур" стартовала ракета-носитель "Протон-М" и вывела на орбиту три спутника "ГЛОНАСС-М". Одновременно 4 спутника, запущенные в 2001-2003 годах, были выведены из группировки.
25 сентября 2008 запуск ракеты-носителя "Протон" с тремя спутниками "ГЛОНАСС-М", 1 спутник, запущенный ранее - на этапе вывода из состава ОГ.
25 декабря 2008 после успешного пуска с космодрома "Байконур" ракеты-носителя "Протон-М" 3 космических аппарата "ГЛОНАСС-М" успешно отделились от разгонного блока и начали автономный полет.
В настоящее время орбитальная группировка состоит из 20 спутников, полная группировка в составе 24-х спутников в соответствии с Федеральной целевой программой "Глобальная навигационная система" должна быть развернута в 2010 году.
В настоящее время состав орбитальной группировки еще не обеспечивает 100-процентную доступность услуг ГЛОНАСС на территории страны, однако количество видимых над горизонтом в России спутников ГЛОНАСС, как правило, равняется трем или более. По заявлениям продавцов навигационного прибора Glospace, для определения местоположения достаточно трех видимых спутников ГЛОНАСС, а четвертый дает уточнение о высоте. Отсюда нетрудно сделать вывод, что для ориентирования наземных пользователей (автоводителей, грибников, туристов и т.п.) система вполне пригодна прямо сейчас, хотя при самолетовождении еще могут возникать определенные трудности.
Спутники "ГЛОНАСС-М" в составе орбитальной группировки будут находиться, как минимум, до 2015 года. Летные испытания негерметичных спутников нового поколения "ГЛОНАСС-К" с улучшенными характеристиками (увеличенным до 10 лет гарантийным сроком и третьей частотой L-диапазона для гражданских потребителей) должны начаться в 2010 году. Этот спутник будет вдвое легче своего предшественника (примерно 850 кг против 1415 кг у "Глонасс-М")
В дальнейшем, после развертывания орбитальной группировки из 24-х космических аппаратов, для ее поддержания потребуется делать по одному групповому пуску в год двух КА "ГЛОНАСС-К" на носителе "Союз", что существенно снизит эксплуатационные расходы.
С 1 января 2006 г. все вновь вводимые в эксплуатацию транспортные средства, включая самолеты, суда, наземный транспорт, геодезическое оборудование и космические аппараты, - должны в обязательном порядке оснащаться аппаратурой спутниковой навигации отечественной системы ГЛОНАСС или комбинированными приемниками ГЛОНАСС/ GPS. Согласно постановлению правительства РФ от 9 июня 2005 г. приемниками ГЛОНАСС должны быть оборудованы находящиеся в эксплуатации транспортные средства. По мнению представителей "Роскосмоса", эти меры являются разумными и призваны защитить отечественный рынок пользовательской аппаратуры глобальной спутниковой навигации. С другой стороны, эти системы в первую очередь направлены на решение задач национальной безопасности, поскольку глобальная спутниковая навигационная система играет важнейшую роль в обеспечении применения высокоточного оружия дальнего радиуса действия. Вместе с тем, будущее системы ГЛОНАСС предстает далеко не в безоблачном свете.
Опасения вызывает отсутствие на рынке конкурентоспособных отечественных приемников ГЛОНАСС, а также конкретных планов развертывания ее массового производства.
В начале 70-х годов в США были начаты работы по созданию СРНС второго поколения - GPS/''Навстар" (аналога отечественной системы ГЛОНАСС). Спутниковая радионавигационная система GPS полностью развернута в 1993 г. А между тем все начиналось так: в ноябре 1913 в Австрии под именем Хедвиг Ева Мария Кислер родилась будущая актриса Хеди Ламар. Еврейская девочка выросла в период расцвета Третьего рейха. Как и другие евреи, она вела образ жизни хамелеона: имела несколько имён, представлялась той личностью, которую требовали обстоятельства. Приходилось хранить многое в тайне и постоянно ходить по лезвию бритвы. В общем, её детство нельзя было назвать счастливым. Запутанная жизненная тропа привела Ламар к закладке одной из основ военной мощи Соединённых Штатов - спутниковой системы глобального позиционирования (Navstar Global Positioning System - GPS). Сегодня эта сеть состоит из тридцати спутников, движущихся по орбите высотой 20 180 километров. Скорость каждого спутника составляет около 11 тысяч километров в час, что позволяет облетать Землю дважды за сутки. Чтобы понять, как работает эта система, напоминающая атомную модель Резерфорда-Бора, давайте начнём с рассмотрения мотивов и переплетений судьбы, которые привели известную актрису к столь важному открытию.
В молодости (в 1933 году) славу актрисе принёс чехословацкий фильм, в котором присутствовала сцена с обнажённой Ламар. Кроме того, она стала первой актрисой, имитировавшей в фильме оргазм. И хотя это был всего лишь хитрый трюк (Ламар во время съёмок укалывала себя английской булавкой), актриса вызвала негодование со стороны Церкви. Сегодня подобными сценами никого не удивишь, но в то время это было слишком вызывающе. Поэтому родители Ламар быстро устроили свадьбу актрисы с магнатом по имени Фриц Мандл, связанным с теневым оружейным бизнесом. Он стал первым из шести её мужей, и, вы не поверите, он производил патроны, гранаты и военные самолёты для Гитлера, несмотря на еврейское происхождение семьи. Мандл был словно зачарован Ламар, он не отходил от неё ни на шаг, возил везде с собой: от встреч с Гитлером и Муссолини до визитов в свои военные лаборатории. Он никогда не выпускал её из виду. Многие считали Ламар недалёкой женщиной, но, как показала судьба, они ошибались. Хотя она не имела высшего образования, актриса быстро вникла в принцип действия систем наведения и противокорабельного оружия, после чего спрятала эти данные, включая секретные системы шифрования, в будущем изобретении которых она участвовала.
Естественно, Ламар ненавидела Гитлера и нацистов, но больше всего она ненавидела Мандла. Она поклялась сделать всё, что в её силах, чтобы уничтожить фашизм и "насолить" Фрицу.
Хеди Ламар предприняла много попыток сбежать от Фрица, и в один прекрасный день она подложила снотворное в кофе служанке, назначенной следить за ней, надела служебную одежду и сбежала из замка под видом прислуги. Вскоре она переехала в Соединённые Штаты, в Голливуд, с далеко идущими планами. Она принимала участие во многих кампаниях против фашистов, например, целовала любого мужчину, кто потратил $25 000 на военные облигации, собрав в результате $17 миллионов. Её популярность и могущество росло не по дням, а по часам.
Судьба познакомила Ламар с авангардистским композитором Джорджем Антейлом, который жил неподалёку. Антейл не боялся экспериментировать. Он отличился своим Ballet Mecanique, странным и громким оркестровым представлением, в котором участвовали пропеллеры, колокола и 16 синхронизированных пианол. Реакция была в те дни неоднозначной. И, подобно синхронизированным пианолам в механической симфонии, вместе с Ламар он разработал идеи, которые, в конце концов, привели к важному изобретению.
Ламар узнала много секретов во время вечеринок, которые Мандл проводил для своих друзей и партнёров, а также из наблюдений за бизнесом Мандла по производству оружия. Она поделилась с Антейлом очень важной идеей: если дистанционно сообщать координаты цели управляемой торпеде по одной контрольной частоте, то враг может легко перехватить сигнал, заглушить его или перенаправить торпеду на другую цель. Но на этом Ламар не остановилась. Она хотела дать своей второй родине военное преимущество. Ламар желала создать управляемые торпеды, которые нельзя будет перехватить или заглушить. Ламар и Антейл вскоре разработали следующий важный компонент: если использовать на передатчике случайный код, который будет менять канал передачи, то можно синхронизировать такие же частотные переходы и на приёмнике. Такая смена каналов связи гарантирует безопасную передачу информации. До того времени псевдослучайные коды использовались для шифровки информации, передаваемой по неменяющимся открытым каналам связи. Здесь же произошёл шаг вперёд: секретный ключ стал использоваться для быстрого изменения каналов передачи информации.
В августе 1942 Ламар и Антейл получили патент под номером 2 292 387 "Секретная система связи". Патент описывает секретные системы связи, включающие передачу ложных каналов на разных частотах. Этот патент стал основой для связи с расширенным спектром, которая сегодня используется повсюду, от мобильных телефонов до WiFi 802.11 и GPS. Американская система глобального позиционирования (United States Navstar Global Positioning System) - это, бесспорно, самая большая система в мире, беспрерывно передающая сигналы с расширенным спектром. Это одна из самых значимых технических разработок двадцатого века, и, в принципе, одна из основ современной военной мощи США. Сегодняшние передовые технологии в долгу у великолепной Хэди Ламар.
Давайте вернёмся в настоящее время и прольём больше света на технологию GPS, пытаясь разобраться в том, как разработки Ламар и Антейла связаны с устройствами, которые мы видим сейчас.
Традиционный метод передачи информации заключался в максимальном наполнении доступного частотного диапазона канала. Одним из любопытных качеств связи с расширенным спектром является то, что, при прежней мощности передаваемого сигнала та же самая информация распределяется на несколько частотных каналов. Если частоты разбросаны достаточно широко, то сигнал может раствориться в шуме и остаться незамеченным.
При использовании передачи с расширенным спектром приходится отделять нужную информацию от шума. Представьте себе, что в песочнице зарыли горсть перца. Кажется, что перец безвозвратно потерян в таком количестве песка. Но если знать, где именно зарыт перец, можно аккуратно откопать его.
В технологии передачи с расширенным спектром для определения последовательности перехода сигнала по частотам используется секретный код. В технологии GPS этот секретный код называется C/A. Сигналы, передаваемые с помощью кодов C/A, похожи на случайный шум, поэтому коды также называют и псевдослучайными (PN codes), но в нашем материале, посвящённом потребительским GPS-устройствам, мы будем называть их C/A. Изначально для работы Navstar Global Positioning System было определено и опубликовано 32 кода C/A. Каждый из этих уникальных кодов привязывается к определённому спутнику на протяжении его времени жизни. У каждого приёмника GPS есть копия этих кодов C/A, поэтому он может держать связь со спутниками и расшифровывать передаваемый поток данных.
Если вы будете ловить частоты в той последовательности, которая описана кодом C/A, то вы сможете получить островок полезной информацию в океане шума. Если вы попытаетесь расшифровать эфир с помощью неверного кода, или код окажется верным, но вы потеряете синхронизацию, то поиски нужной информации ни к чему не приведут - вы получите один лишь шум.
На одном частотном диапазоне может передаваться несколько совершенно разных каналов с данными, но их можно разделить и восстановить. В системе GPS сигнал транслируется на одном частотном диапазоне, но использует разные коды C/A, причём, с одной стороны они шифруют информацию, а с другой стороны "разбрасывают" сигнал по частотному диапазону. На орбите находится большое количество спутников, которые передают данные на одних и тех же частотах, но GPS-приёмник может выделить в сигнале информацию с отдельных спутников. Поэтому GPS-приёмники могут получать информацию от нескольких спутников, имея всего одну антенну.
Благодаря технологии расширенного спектра, каждый спутник использует собственный код C/A для шифрования потока данных и разброса его по частотам. Данные модулируются и, в соответствии с кодом C/A, "разбрасываются" в пределах 1-МГц полосы относительно несущей частоты GPS L1 (1575,42 МГц). Можно представить вещание спутников по аналогии с зашифрованными пакетами TCP/IP, пакеты разных потоков данных перемешаны между собой, причём коды C/A в данном случае используются не только для выборки нужных пакетов среди других, но и для задания последовательности, в которой следуют пакеты. GPS-приёмник, таким образом, постоянно сканирует эфир и использует набор из 32 возможных паролей, чтобы расшифровать данные.
Современные технологии передачи GPS работают несколько по-другому. Код используется уже не для смены частотных каналов, поскольку GPS передаёт все данные на одной частоте 1575,42 МГц. Код C/A используется для модуляции несущей частоты в пределах 1 МГц. Поток навигационных данных генерируется на частоте 50 Гц (50 бит/с), поэтому его можно легко распределить в пределах 1-МГц частотного диапазона.
Спасибо Альберту Эйнштейну за его теорию относительности, в частности факту, что при высокой скорости движения ход часов меняется. Поскольку каждый GPS-спутник на орбите, по существу, является атомными часами, они должны корректироваться с учётом релятивистской теории относительности. По сравнению с часами на земле, GPS-часы замедляются разницей в скорости. Впрочем, благодаря правильным расчётам этот эффект можно нивелировать. Ход часов на орбите оказывается на 446,47 в 1012 медленнее. Представьте 2-ГГц процессор Intel Core 2 Duo на орбите: его реальная скорость будет меньше на 1 такт. Чтобы система GPS работала, спутники должны быть синхронизированы. Чем больше ошибок будет предупреждено, тем более точное определение мы получим.
Чтобы технология с расширенным спектром работала, приём и передача сигнала должны синхронизироваться, используя один и тот же код. В своё время Ламар и Антейл предлагали синхронизировать передачу с помощью механических часов на обоих концах системы, но в современной системе GPS используются специальные корреляторы. Корреляторы, по существу, и связывают теорию Ламар о передаче в расширенном спектре с современной технологией глобального позиционирования. Как? Коррелятор - это алгоритм, который автоматически синхронизирует процесс расшифровки в GPS-приёмнике с процессом шифрования на спутнике. Во время настройки на спутники процесс синхронизации GPS-приёмника на множественные одновременные передачи с группы спутников корректирует небольшие относительные различия в синхронизации. Они связаны с расстоянием между спутниками и приёмником.
Способы синхронизации, предложенные Ламар, для современных систем не подходят. Используются более тонкие механизмы. Однако, как только синхронизация будет достигнута, придётся учитывать задержку, с которой сигнал от спутника доходит до GPS-приёмника. И эта задержка напрямую превращается в расстояние.
Учитывая релятивистскую теорию Эйнштейна, система GPS синхронизирует часы. Ваш GPS-приёмник тоже пытается вычислить "системное" время GPS внутри себя. Но даже если спутники будут передавать пакеты в одно время, расстояния до них разные, поэтому и задержка, через которую пакеты достигнут приёмника, тоже будет разная. Корреляторы позволяют синхронизировать разные коды C/A с передачей данных соответствующими спутниками. Задержка у каждого спутника будет своя, поэтому и относительное временное смещение кода C/A по сравнению с "системным" временем будет для каждого спутника своим. Представьте себе обычную локальную сеть. Время ping-запроса позволяет оценить, насколько клиент расположен ближе или дальше. И задержки коррелятора тоже напрямую связаны с расстоянием до конкретного спутника.
Как можно видеть, коррелятор в приёмнике сдвигает копию одного из 32 возможных кодов C/A. Сдвинув код C/A на один шаг, коррелятор проверяет, появляются ли точные данные. Когда сдвиг кода C/A даст нужную информацию, данные считаются полученными. Для определения, информация это или "мусор", коррелятор использует специальные алгоритмы. После корреляции можно расшифровать навигационные данные Корреляция хороша тем, что позволяет узнать примерное расстояние до спутника. А, зная расстояние до 4 спутников, можно высчитать ваше положение на Земле.
Каждый пользователь GPS-приёмников знает, что на определение координат требуется время. Это, увы, недостаток GPS. Некоторые устройства настраиваются быстрее других, но какое-то время всё равно требуется. Как мы теперь знаем, корреляторы позволяют выровнять код C/A передатчика с кодом C/A приёмника. Вообще, механизм действия коррелятора очень напоминает атаку хакера: коррелятор пытается дешифровать сигнал методом подбора кода. Чем больше корреляторов работают параллельно, тем быстрее будет находить координаты GPS-приёмник. У GPS-чипсетов SiRF Star II и III используется 2 000 и 200 000 корреляторов, соответственно. Последние чипсеты uBlox Antaris 5 GS используют более миллиона корреляторов. Правило простое: чем больше корреляторов, тем быстрее будут найдены координаты.
Благодаря актрисе Хеди Ламарр несколько десятилетий назад были заложены основы передачи данных с расширенным спектром. Навигационная система Navstar (GPS) является самым большим излучателем с расширенным спектром, поскольку она покрывает каждый сантиметр нашей планеты. Даже несколько пугает, поскольку из-за расширенного спектра энергия сигнала размывается по столь широкому диапазону, что оказывается даже ниже фонового шума нашей вселенной. Благодаря корреляторам и сдвигу кодов C/A в поисках соответствия со спутником, можно рассчитать расстояние до разных спутников. Синхронизированные по времени барабаны пианол, которые использовали Хеди Ламарр и Джордж Антейл, являются своеобразным прообразом современных систем корреляции. Поэтому мы вряд ли ошибёмся, назвав Хеди Ламарр одним из изобретателей, заложивших основы современной системы GPS.
1.2 Оптимальная структура спутниковых систем местоопределения автотранспорта
В настоящее время у многих ведомств и организаций возникает необходимость оперативного слежения за местоположением и состоянием подвижных объектов, а также передачи на них оперативной информации.
Практически все заинтересованные диспетчерские службы в настоящее время имеют в своем распоряжении те или иные технические средства, позволяющие осуществлять контроль/слежение за передвижением своих объектов. Однако существующие средства не являются совершенными, обладают малой степенью автоматизации и имеют малую достоверность.
В последние годы настоятельно ставится задача о внедрении новых надежных технических средств, которые позволили бы осуществлять автоматизированный сбор диспетчерской информации с подвижных объектов, а также передавать информацию на объекты. Технически эта задача может быть выполнена целым рядом средств, как традиционных, так и спутниковых. На практике, однако, ни одна из возможных систем так и не была реализована на территории России.
Создание такой системы позволит обеспечить автоматизированный сбор информации о дислокации подвижных объектов, обслуживаемых в рамках данной системы вне зависимости от их местоположения на Земном шаре, т.е. в глобальном режиме. При этом средства системы будут автоматически вычислять географические координаты местоположения объектов и направлять их в соответствующие диспетчерские пункты пользователей. Информация может быть также запрошена с объекта по инициативе диспетчера из диспетчерского пункта и имеется возможность передать на объект необходимую информацию.
Средства системы позволяют не только решать коммерческие цели управления, но и обеспечат повышение безопасности движения объектов и будут способствовать охране человеческой жизни. Данные о дислокации аварийных объектов могут быть переданы в соответствующие поисково-спасательные службы.
Изучения, проведенные в России показали, что имеются следующие основные категории потенциальных пользователей, заинтересованные в получении оперативной информации с подвижных и стационарных объектов:
1. Администрации, эксплуатирующие автомобильный транспорт.
2. Организации, эксплуатирующие подвижной железнодорожный состав и специальные средства.
3. Организации, эксплуатирующие подвижные автомобильные объекты.
4. Научные организации, проводящие с помощью подвижных технических средств изучение окружающего пространства.
5. Организации, эксплуатирующие магистральные трубопроводы и иные удаленные объекты.
6. Предприятия топливно-энергетического комплекса.
7. Сельскохозяйственные предприятия.
8. Коммерческие структуры.
Анализ требований потенциальных пользователей к системам сбора оперативной информации позволил выявить следующее:
1. Необходимость автоматического определения географического местоположения объекта, не требующего вмешательства оператора в работу оконечного устройства. При этом требования к точности определения местоположения варьируются от нескольких метров до десятков километров. Некоторые категории объектов движутся по строго определенным маршрутам (поезда, автомобили), в то время, как другие имеют большую свободу перемещений.
2. Требования к оперативности доставки информации от оконечного устройства до пункта сбора данных пользователя изменяются от нескольких минут до нескольких часов.
3. Количество определений - от нескольких раз в месяц до нескольких раз в час.
4. Возможность передачи дополнительной информации с подвижного объекта и на объект. При этом выявлен достаточно широкий диапазон информации, подлежащей передачи.
5. Наличие простых и недорогостоящих оконечных устройств пользователей, которые при необходимости могли бы работать от автономных источников питания.
В использовании системы слежения за местоположением подвижных объектов проявили заинтересованность ряд ведомств и организаций (МВД, МПС и др.). Отдельно стоит отметить заинтересованность в приобретении средств мониторинга автотранспортными предприятиями.
Система должна обеспечивать возможность слежения за передвижением ценных грузов, легкового автотранспорта и других подвижных объектов в реальном масштабе времени с точностью определения местоположения до 50 метров, а также получения от объектов аварийной информации.
В состав системы должны входить главный и региональные диспетчерские центры, в которые информация от объектов должна поступать одновременно.
Должна быть предусмотрена возможность запросов о местоположении и состоянии объектов из диспетчерских центров, а также передача на них информации.
Тип передаваемой информации - цифровой.
Терминалы, устанавливаемые на подвижные объекты, должны быть устойчивы к вибрационным воздействиям, иметь малые габариты, вес (не более 1 - 1,5 кг) и энергопотребление. Электропитание должно осуществляться от автономного источника.
Необходимо предусмотреть возможность автоматического срабатывания терминалов в аварийных ситуациях.
Терминалы должны обеспечивать бесперебойную работу в диапазоне температур от - 50 до +50 °С при влажности воздуха при 30 °С - 99%.
Антенны терминалов должны иметь малые габариты и обеспечивать бесперебойную связь при скорости ветра до 30 м/сек.
1.3 Анализ систем мониторинга автотранспорта GSM и Глонасс
Системы GPS и ГЛОНАСС во многом подобны, но имеют и различия. Они разрабатывались с учетом наиболее вероятных областей применения. Поэтому ГЛОНАСС имеет преимущества на высоких широтах, а GPS - на средних.
Таблица 1. Основные характеристики навигационных систем ГЛОНАСС и GPS
| Характеристки |
ГЛОНАСС |
GPS |
| Количество спутников (проектное) |
24 |
24 |
| Количество орбитальных плоскостей |
3 |
6 |
| Количество спутников в каждой плоскости |
8 |
4 |
| Тип орбиты |
Круговая (S=0+-0,01) |
Круговая |
| Высота орбиты |
19100 км |
20200 км |
| Наклонение орбиты, град |
64,8+-0,3 |
55 (63) |
| Период обращения |
11 ч 15,7 мин. |
11 ч 56,9 мин. |
| Способ разделения сигналов |
Частотный |
Кодовый |
| Навигационные частоты, МГц: L1 L2 |
1602,56 - 1615,5 1246,44 - 1256,5 |
1575,42 1227,6 |
| Период повторения ПСП |
1 мс |
1 мс (С/А-код) 7 дней (Р-код) |
| Тактовая частота ПСП, МГц |
0,511 |
1,023 (С/А-код) 10,23 (Р,Y-код) |
| Скорость передачи цифровой информации, бит/с |
50 |
50 |
| Длительность суперкадра, мин |
2,5 |
12,5 |
| Число кадров в суперкадре |
5 |
25 |
| Число строк в кадре |
15 |
5 |
| Погрешность* определения координат в режиме ограниченного доступа: горизонтальных, м вертикальных, м |
не указана |
18 (P,Y-код) 28 (P,Y-код) |
| Погрешности* определения проекций линейной скорости, см/с |
15 (СТ-код) |
<200 (С/А-код) 20 (P,Y-код) |
| Погрешность* определения времени в режиме свободного доступа, нс в режиме ограниченного доступа, нс |
1000 (СТ-код) - |
340 (С/А-код) 180 (P,Y-код) |
| Система отсчета пространственных координат |
ПЗ-90 |
WGS-84 |
| * Погрешности в определении координат, скорости и времени для системы ГЛОНАСС - 0,997, для GPS - 0,95. |
||
Вывод: необходимость сдвига диапазона частот вправо, так как в настоящее время ГЛОНАСС мешает работе как подвижной спутниковой связи, так и радиоастрономии является значительной помехой для системы Глонасс. Так же при смене эфемерид спутников, погрешности координат в обычном режиме увеличиваются на 25-30м, а в дифференциальном режиме - превышают 10 м; при коррекции набежавшей секунды нарушается непрерывность сигнала ГЛОНАСС. Это приводит к большим погрешностям определения координат места потребителя, что недопустимо для гражданской авиации, однако при этом к 2011 году погрешность определения координат уменьшится до всего 1 метра (благодаря увеличению числа спутников; сложность пересчета данных систем ГЛОНАСС и GPS из-за отсутствия официально опубликованной матрицы перехода между используемыми системами координат в настоящее время практически решена. Уже существуют приемники, работающие в обоих режимах. Такие приемники, одновременно работающие с сигналами ИСЗ GPS и ГЛОНАСС, в Украине изготавливаются на ГП “Оризон" (г. Смела), кроме того налажено и активно развивается их производство в России.
2. С путниковая радионавигационная система Глонасс
2.1 Общие сведения о системе
Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) предназначена для непрерывного и высокоточного определения пространственного (трехмерного) местоположения, вектора скорости движения, а также времени космических, авиационных, морских и наземных потребителей в любой точке Земли или околоземного пространства. В настоящее время она состоит из трех подсистем:
подсистема космических аппаратов (ПКА), состоящая из навигационных спутников ГЛОНАСС на соответствующих орбитах;
подсистема контроля и управления (ПКУ), состоящая из наземных пунктов контроля и управления;
аппаратуры потребителей (АП).
Считается, что возможности существенного повышения точности навигационных определений связаны с созданием глобальной системы отсчета, использующей самоопределяющиеся навигационно-геодезические спутники без привлечения измерений с поверхности Земли.
Система ГЛОНАСС с полностью развернутой группировкой НС характеризуется вероятностью обеспечения навигационных определений
не хуже 0,947 в непрерывном навигационном поле. Точностные характеристики определения плановых координат, высоты и времени равны соответственно 30 м, 30 м и 1 мкс, а доступность системы - 0,98).
Информация, передаваемая потребителям ГЛОНАСС в составе служебной информации конкретного НС, содержит координаты фазового центра передающей антенны данного НС в геоцентрической системе координат. Эта система координат также как и принятая в СРНС СРS система координат WGS-84 относится к декартовым системам типа ЕСЕР (Еаrth-сеntеred Еаrth-fixed, т.е. начало координат расположено в центре масс Земли и направления осей связаны с Землей). До 1993 г. в СРНС ГЛОНАСС использовалась система координат СГС-85.
Частотно-временное обеспечение реализуется системой синхронизации ГЛОНАСС, которая обеспечивает формирование единой системной шкалы времени, синхронизацию БШВ (бортовых шкал времени) каждого с СШВ. расчет частотно-временных поправок (ЧВП). определение расхождения СШВ относительно шкалы Государственного эталона координированного всемирного времени UТС (SU), расчет поправок к СШВ, закладку поправок на борт НС (дважды в сутки) для передачи их потребителям в составе навигационного сообщения.
Частотно-временные поправки рассчитывают на каждом витке НС в виде двух параметров линейной аппроксимации расхождения БШВ относительно НС на тридцати - (шестидесяти) минутном интервале и закладываются дважды в сутки (ориентировочно каждые 12 ч) на борт каждого НС.
Шкала времени каждого спутника ГЛОНАСС может эпизодически подвергаться коррекции с целью того, чтобы отличие этой шкалы от шкалы времени центрального хронизатора не превышало + 1 нс. В этом случае и течение времени, необходимого наземному комплексу для проведения сверки и формирования поправок, в навигационном сообщении передаются признаки, запрещающие использование лого спутника для целей навигации.
Шкала системного времени в ГЛОНАСС корректируется одновременно с коррекциями на целое число секунд шкал UТС (SU), проводимыми Службой Всемирного времени. Коррекции шкал UTС необходимы для их согласования с астрономической шкалой UT1 всемирного времени. Указанная коррекция СШВ ГЛОНАСС осуществляется в 00 ч 00 мин 00 с в полночь с 30 июня на 1 июля или с 31 декабря на 1 января. О планируемом проведении секундной коррекции СШВ ГЛОНАСС сообщается заблаговременно.
Наземный сегмент системы ГЛОНАСС - подсистема контроля и управления, предназначена для контроля правильности функционирования, управления и информационного обеспечения сети спутников системы ГЛОНАСС, состоит из следующих взаимосвязанных стационарных элементов: центр управления системой ГЛОНАСС; центральный синхронизатор; контрольные станции; система контроля фаз; квантооптические станции; аппаратура контроля поля.
Наземный сегмент выполняет следующие функции:
проведение траекторных измерений для определения и прогнозирования и непрерывного уточнения параметров орбит всех спутников;
временные измерения для определения расхождения бортовых шкал времени всех спутников с системной шкалой времени ГЛОНАСС, синхронизация спутниковой шкалы времени с временной шкалой центрального синхронизатора и службы единого времени путем фазирования и коррекции бортовых шкал времени спутников
формирование массива служебной информации (навигационных сообщений), содержащего спрогнозированные эфемериды, альманах и поправки к бортовой шкале времени каждого спутника и другие данные, необходимые для формирования навигационных кадров
передача (закладка) массива служебной информации, в память ЭВМ каждого спутника и контроль за его прохождением
контроль по телеметрическим каналам за работой бортовых систем спутников и диагностика их состояния
контроль информации в навигационных сообщениях спутника, прием сигнала вызова ПКУ
управление полетом спутников и работой их бортовых систем путем выдачи на спутники временных программ и команд управления; контроль прохождения этих данных; контроль характеристик навигационного поля
определение сдвига фазы дальномерного навигационного сигнала спутника по отношению к фазе сигнала центрального синхронизатора
планирование работы всех технических средств ПКУ, автоматизированная обработка и передача данных между элементами ПКУ
Центр управления системой соединен каналами автоматизированной и неавтоматизированной связи, а также линиями передачи данных со всеми элементами ПКУ, планирует и координирует работу всех средств ПКУ на основании принятого для ГЛОНАСС ежесуточного режима управления спутниками в рамках технологического цикла управления. При этом ЦУС собирает и обрабатывает данные для прогноза эфемерид и частотно-временных поправок, осуществляет с помощью, так называемого, баллистического центра расчет и анализ пространственных характеристик системы, анализ баллистической структуры и расчет исходных данных для планирования работы элементов ПКУ.
Центральный синхронизатор, взаимодействуя с ЦУС, формирует шкалу времени ГЛОНАСС, которая используется для синхронизации процессов в системе, например, в системе контроля фаз. Он включает в свой состав группу водородных стандартов.
Контрольные станции (станции управления, измерения и контроля или наземные измерительные пункты) по принятой схеме радиоконтроля орбит осуществляют сеансы траекторных и временных измерений, необходимых для определения и прогнозирования пространственного положения спутников и расхождения их шкал времени с временной шкалой ГЛОНАСС, а также собирают телеметрическую информацию о состоянии бортовых систем - спутников. С их помощью происходит закладка в бортовые ЭВМ спутников массивов служебной информации (альманах, эфемериды, частотно-временные поправки и др.), временных программ и оперативных команд для управления бортовыми системами
Траекторные измерения осуществляются с помощью радиолокационных станций, которые определяют запросным способом дальность до спутников и радиальную скорость. Дальномерный канал характеризуется максимальной ошибкой около 2...3 м. Процесс измерения дальности до спутника совмещают по времени с процессом закладки массивов служебной информации, временных программ и команд управления, со съемом телеметрических данных со спутника.
В настоящее время для обеспечения работ ГЛОНАСС могут использоваться КС, рассредоточенные по всей территории России. Часть КС и других элементов наземного сегмента ГЛОНАСС осталась вне территории России.
В случае выхода из строя одной из станций возможна ее равноценная замена другой, так как сеть КС обладает достаточной избыточностью и в наихудшей ситуации работу системы может обеспечивать ЦУС и одна станция, однако интенсивность ее работы будет очень высокой
Описанная сеть КС отличается от аналогичной структуры СРНС GPS тем, что обеспечивает высокое качество управления орбитальной группировкой только с национальной территории. КС ГЛОНАСС могут использоваться для обеспечения функционирования других космических средств.
Кванто-оптическая станции предназначены для периодической юстировки радиотехнических каналов измерения дальности КС с помощью лазерного дальномера. В этих целях на каждом спутнике размещены специальные лазерные отражатели. Применение КОС обеспечивает высокоточное измерение параметров движения спутников ГЛОНАСС. За последние 20 лет разработаны три отечественные лазерные станции слежения или КОС: лазерная дальномерная система Гео-ИК; КОС Эталон; КОС Майданак (Узбекистан).
Наиболее эффективно лазерные станции работают в ночное время при хорошей видимости.
Система ГЛОНАСС создавалась в условиях, когда уровень фундаментальных исследований в области геодезии, геодинамики и геофизики не обеспечивал требуемую точность эфемеридного обеспечения системы. В этих условиях был проведен комплекс работ по обоснованию путей, решения этой проблемы через построение согласующих моделей движения спутников, параметры которых определяют в процессе решения самой задачи баллистико-навигационного обеспечения системы
Исследования показали, что необходимо отказаться от типовых острорезонансных (например, с периодом обращения спутника равным 12 ч, как в СРНС GPS, когда период вращения Земли вокруг своей оси равен двум периодам обращения спутника) орбит спутников, так как в процессе моделирования уравнений траекторного движения спутников это повышает устойчивость их решений и ослабляет корреляции между параметрами отдельных уравнений (моделирующих, например, изменение геопотенциала, координат измерительных средств, радиационного давления). Кроме того, оказалось, что наивысшая точность баллистико-эфемеридного обеспечения системы при решении многомерной навигационной задачи с расширенным вектором состояния обеспечивается при обработке измеренных текущих навигационных параметров на интервале 8 сут. Переход от острорезонансных орбит был осуществлен путем увеличения числа витков спутника (по сравнению с GPS) на интервале 8сут до 16...17. Число спутников в системе брано равным 24 с равномерным распределением по трем орбитальным плоскостям. Все спутники системы фазируются таким образом, что на больших временных интервалах они имеют один след на поверхности Земли. Это обеспечивает высокую баллистическую устойчивость системы и относительно высокую точность и простоту расчетов траекторий. Опыт эксплуатации системы показал, что при обеспечении начального периода обращения спутника с точностью не хуже 0,1 с на протяжении заданного срока активного существования спутника его положение в системе корректировать не нужно.
В настоящее время в системе ГЛОНАСС используется запросная технология эфемеридного обеспечения, когда исходной информацией для расчета эфемерид служат данные измеренных текущих параметров спутников, поступающие в ЦУС от контрольных станций по программам межмашинного обмена через вычислительную сеть. Ежесуточно осуществляется 10...12 сеансов передачи информации по каждому спутнику.
В типовых операциях управления ПКУ ГЛОНАСС предусмотрено использование измерений КС в запросном режиме с двумя разновидностями ДН бортовой антенной системы - всенаправленной и узкой. В первом случае точностные характеристики измерений запросной дальности находятся в пределах от сотен метров до десятков километров. Такие измерения выполняют только на первом этапе полета НС.
Определение параметров движения спутника производится по запросным измерениям дальности и радиальной скорости в два этапа. На первом этапе определяют параметры движения спутника по измерениям радиальной скорости с последующей переработкой этих измерений с использованием уточненных по ним начальных условий движения. На втором этапе вычисляют параметры движения спутника по измерениям дальности и радиальной скорости.
Параметры движения спутника на участках приведения и постановки спутника в системную точку находят на мерных интервалах продолжительностью 14 витков. Технология эфемеридного обеспечения на этапе штатной эксплуатации основана на использовании высокоточных измерений дальности КС и включает предварительную обработку измерений (расшифровка данных измерений КС с последующим устранением неоднозначности измерений дальности, калибровкой, приведением измерений к центру масс спутника для компенсации выноса бортовой антенны, учетом ионосферной и тропосферной рефракции).
Решение проблемы высокоточных определений орбит возможно при, создании высокоточных математических моделей движения и измерений, на точность которых влияют следующие факторы: геофизические, определяемые погрешностью задания системы координат и гравитационного поля Земли; геодинамические, связанные с нахождением координат полюса и неравномерности вращения Земли; а также факторы, обусловленные учетом негравитационных возмущений в модели движения.
В основе этих методов лежит понятие согласующих моделей, которые представляют собой системы геофизических параметров и параметров, определяющих математическую модель движения НС по данным обработки навигационных измерений. Такие модели не являются фундаментальными и пригодны только для конкретных орбит, и позволяют при наличии высокоточных измерений параметров движения НС и достаточно полном описании действующих на них сил уменьшить влияние погрешностей определения геофизических и геодинамических факторов на точность определения эфемерид конкретного НС за счет уточнения координат измерительных пунктов, параметров гравитационного поля Земли, параметров вращения Земли и включения координат КС и других параметров согласующей модели в состав расширенного вектора состояний НС.
При решении задач определения и прогнозирования движения спутника эфемериды рассчитывают путем численного интегрирования дифференциальных уравнений движения комбинированным методом Рунге - Кутта и Адамса в координатной системе, заданной средним экватором и равноденствием эпохи начала бесселева года (в 1975 г). В правых частях дифференциальных уравнений учитываются основные возмущающие силы. Гравитационное поле Земли представлено разложением в ряд по сферическим функциям до гармоник степени и порядка 8 включительно. При моделировании расчетных аналогов измерений учитываются уходы полюса и поправки ко времени за счет неравномерности вращения Земли.
При выводе спутника из системы требование к точности нахождения параметров движения определяются исходя из необходимости надежного вхождения в связь со спутником. В этом случае параметры движения спутника определяют на мерных интервалах длительностью не менее четырех витков не реже одного раза в месяц. В состав уточняемых параметров при этом включаются только кинематические.
В соответствии с целевым назначением система ГЛОНАСС имеет в своем составе подсистему КА (навигационных спутников), которая представляет собой орбитальную группировку из 24 спутников. Спутники, излучая непрерывные радионавигационные сигналы, формируют в совокупности сплошное радионавигационное поле на поверхности Земли и в околоземном пространстве, которое используется для навигационных определений различными потребителями.
Структура сети спутников такова, что в каждой точке земной поверхности и околоземного пространства в любой момент времени находится одновременно не менее четырех спутников, взаимное расположение и качество сигналов которых обеспечивает ему возможность координатно-временных измерений с заданными характеристиками. Требование по количественному составу орбитальной группировки основывается на том, что заданные точностные характеристики навигационного обеспечения могут быть получены в системе ГЛОНАСС при наличии в орбитальной группировке, например, 21 спутника (по семь спутников в каждой орбитальной плоскости), а остальные обеспечивают "горячий" резерв и высокую устойчивость системы.
Спутники ГЛОНАСС размещаются на трех практически круговых орбитах. Высота каждой орбиты составляет 18 840... 19 440 км (номинальное значение составляет 19 100 км), что позволяет отнести ГЛОНАСС к среднеорбитальным СРНС.
Таким образом, орбитальная группировка спутников ГЛОНАСС с несинхронными почти круговыми орбитами более стабильна по сравнению с группировкой спутников СР5 с синхронными 12-тичасовыми орбитами.
Рассмотренная структура орбитальной группировки позволяет обеспечить практически непрерывное и глобальное покрытие земной поверхности и околоземного пространства (включая ближний космос) навигационным полем с заданными характеристиками.
В отличие от сигнала стандартной точности системы GPS в системе ГЛОНАСС не предусматривается его принудительного загрубления, хотя иногда и используется применительно к нему обозначение ПТ-сигнал (сигнал пониженной точности). Однако имеющиеся более низкие по сравнению с ВТ-сигналом характеристики точности можно отнести к этапу выбора параметров сигнала при разработке системы и не связаны с политикой поставщиков нави рационного обслуживания в системе ГЛОНАСС на этапе ее эксплуатации. В связи с этим всем пользователям ГЛОНАСС доступны измерения координат местоположения и скорости с беспрецедентно высокой (даже по отношению к открытому каналу системы GPS) точностью. В дальнейшем более подробно рассматривается структура и характеристики СТ-сигнала, передаваемого в диапазоне L1.
Контроль целостности радионавигационного поля СРНС заключается в контроле качества излучаемых НС системы навигационных радиосигналов и качества передаваемой ими служебной информации с целью поддержания высокой достоверности навигационных измерений и/или предупреждения потребителей о состоянии системы. Известны несколько способов контроля целостности.
Самоконтроль бортовых систем НС. На спутниках системы ГЛОНАСС осуществляется непрерывный автономный контроль (самоконтроль) функционирования основных бортовых систем. При обнаружении непарируемых нарушений нормального функционирования этих систем, влияющих на качество излучаемого спутником навигационного радиосигнала и достоверность передаваемого навигационного сообщения, на спутнике формируется признак его неисправности, который передается потребителю системы в составе оперативной информации навигационного сообщения. Дискретность передачи такого признака составляет 30 с. Максимальная задержка от момента обнаружения неисправности до момента передачи соответствующего признака не превышает 1 мин. В дальнейшем планируется уменьшить это время до 10 с.
Недостатки этого канала контроля заключаются в его неполноте, например, средства самоконтроля рассчитаны на обнаружение не всех возможных нарушений в работе каждой бортовой системы НС; неисправности самих средств контроля не обнаруживаются и не сопровождаются передачей соответствующего сообщения потребителям; искажение эфемерид не может быть обнаружено на самом НС и т.д.
Наземный контроль. Качество навигационного поля ГЛОНАСС контролируется и специальной аппаратурой из состава ПКУ - аппаратурой контроля поля (АКП). После соответствующего отказа бортовой аппаратуры спутника АКП обеспечивает формирование признака его неисправности в альманахах системы всех НС не позднее, чем через 16 ч. Дискретность передачи данного признака в служебных сообщениях НС ГЛОНАСС составляет 2,5 мин.
Однако, оба указанных метода контроля целостности навигационного ноля ГЛОНАСС не обеспечивают требуемой полноты проверок и своевременности оповещения потребителей.
На борту спутника находятся: бортовой навигационный передатчик (БНП); хронизатор (БХ); управляющий комплекс (УК); системы ориентации и стабилизации (СО), коррекции, электропитания; терморегулирования; бортовые средства заправки и обеспечения среды; элементы конструкции и кабельная сеть.
Для обеспечения надежности основные системы навигационного спутника дублируются. Рассмотрим основные элементы бортовой аппаратуры НС ГЛОНАСС.
Аппаратура потребителей (приемоиндикаторы СРНС) предназначена для определения пространственных координат, вектора скорости, текущего времени и других навигационных параметров в результате приема и обработки радиосигналов, принятых от НС.
На вход ПИ поступают сигналы от НС, находящихся в зоне радиовидимости.
Современные ПИ являются аналого-цифровыми системами, сочетающими аналоговую и цифровую обработку сигналов. Переход на цифровую обработку осуществляется на одной из промежуточных частот, при этом имеет место тенденция к повышению этой промежуточной частоты.
Так как приемоиндикаторы СРНС имеют множество возможных применений (наземное, авиационное, морское, космическое и др.), то при их разработке необходимо основываться на создании унифицированных узлов с минимальной номенклатурой, из которых в дальнейшем можно конструировать ПИ различного применения.
В качестве антенны можно использовать микрополосковую антенну (МПА), что обусловлено ее малой массой и габаритными размерами, простотой изготовления и дешевизной. Микрополосковая антенна состоит из двух параллельных проводящих слоев, разделенных диэлектриком: нижний проводящий слой является заземленной плоскостью, верхний - собственно излучателем антенны. По форме излучатель может быть прямоугольником, эллипсом, пятиугольником и т.д. Антенна рассчитывается для работы на низшей резонансной моде, которая излучается в основном в верхнюю полусферу (в направлении вертикальной оси). Микрополосковая антенна имеет ДН, обеспечивающую всенаправленный прием сигналов правосторонней круговой поляризации в верхней полусфере.
Приемник является многоканальным устройством, в котором, как отмечалось выше, проводится аналоговое усиление сигналов, фильтрация и преобразование частоты несущей сингалов НС (понижение частоты), а также преобразование аналогового сигнала в цифровую форму. Так как в ГЛОНАСС сигнал от каждого спутников имеет свою несущую частоту, то каждый канал должен быть настроен на частоту сигнала одного из НС и селектировать частоты сигналов других НС.
2.2 Особенности использования Глонасс на транспорте
Проблема автоматизации управления движением наземных транспортных средств возникла в начале XX века вместе с развитием железнодорожного и автомобильного транспорта. Наибольшего развития автоматизированные системы управления движением получили на железнодорожном транспорте на основе релейной автоматики УКВ-радиосвязи.
В 70-х годах вопрос об автоматизации управления движением автомобильного транспорта в связи с массовым развитием дорожного движения в промышленно развитых странах встал особенно остро. Поэтому на мировом рынке появились системы управления автотранспортом на основе локальных систем местонахождения объектов и автомобильных УКВ-радиостанций.
Принципиально новые возможности для создания автоматизированных систем управления транспортными потоками в масштабах городов, регионов и даже континентов появились в 80-х годах в связи с развитием радиосистем дальней навигации и дальней радиосвязи: импульсно-фазовых и фазовых радионавигационных систем, систем метеорной радиосвязи и, в особенности, спутниковых РНС и спутниковых систем радиосвязи.
Организация движения транспортных средств характеризуется большими разнообразием, что требует учета специфики навигационного обеспечения при перевозке грузов и пассажиров.
Классификацию видов организации движения наземного транспорта проводят по различным признакам: в локальном регионе или по проложенным магистралям и трассам; в составе группы или одиночное движение; по установленным или произвольным маршрутам; по расписанию или вне установленного регламента.
Каждый из вариантов организации движения принципиально отличается один от другого тем, что требует разработки для каждого варианта индивидуальной технологии управления транспортными процессами, основу которых составляет специфическое навигационное обеспечение с соответствующими требованиями.
Уровень требований к навигационному обеспечению технических средств транспортно-дорожного комплекса зависит от того, где используются результаты определения параметров движения - непосредственно на борту транспорта или осуществляется дистанционный контроль и управление транспортом, например, на диспетчерском пункте.
Навигационное обеспечение наземных транспортных средств необходимо для реализации информационно-навигационных технологий, используемых при решении задач контроля в интересах повышения эффективности и безопасности дорожного движения.
Области применения информационно-навигационных технологий дифференцированы по различным группам решаемых задач в транспортно-дорожном комплексе России:
автоматическое обнаружение мест дорожно-транспортных происшествий;
охрана и контроль состояния перевозимых грузов и обеспечение безопасности участников дорожного движения;
управление муниципальным транспортом (автобусы, троллейбусы, трамваи, транспорт жилищно-коммунальных хозяйств, транспорт доставки продовольственных и промышленных товаров населению, пожарная служба, скорая помощь);
управление технологическим транспортом при строительстве и ремонте автомобильных дорог;
мониторинг, идентификацию и управление транспортом на карьерных и терминальных перевозках;
мониторинг, идентификацию и управление перевозками крупногабаритных, высокотоннажных и экологически опасных грузов;
управление транспортом ведомственных и коммерческих организаций (внутригородские и пригородные перевозки);
управление транспортом магистральных и интермодальных (земля-море, земля-река и т.п.) перевозчиков.
Требования наземных потребителей к точности местоопределения транспортных средств зависят от предназначения тех или иных технологий контроля и управления транспортными процессами:
при решении большинства задач, связанных с обеспечением безопасности движения и организации перевозок пассажиров и грузов в процессе хозяйственной деятельности, требования к точности местоопределения транспортных средств с погрешностью не хуже 30 м. (предельная погрешность) в настоящее время удовлетворяют потребности автомобильно-дорожной отрасли;
при решении специальных задач (слежение за экологически опасными грузами, защита от угона и поиск угнанных средств и т.д.) требования к точности местоопределения являются более высокими - не хуже 5...15 м. (предельная погрешность).
Требования наземных потребителей к размерам рабочей зоны задаются исходя их анализа территориально пространственных условий реализации задач, использующих информационно-навигационные технологии:
территория Российской Федерации, территории стран ближнего и дальнего зарубежья - при организации внутрироссийских и межгосударственных перевозок;
глобальная зона - при организации интермодальных перевозок, включающих перевозку грузов речным и морским транспортом.
Требования к дискретности (темпу) обновления координатной информации задаются на основании анализа структуры тех или иных технологий:
при контроле и управлении большими группировками (системами) транспортных средств - не более 1 с (по каждому транспортному средству, входящему в состав группировки;
при решении специальных задач - не более 1 с;
при контроле и управлении одиночными транспортными средствами при их движении в условиях города и по магистрали - 0,5...1 мин.
При формировании требований к доступности наземных потребителей к радионавигационным системам исходят из критериев решения (достижения) тех или иных задач, реализуемых при использовании соответствующих технологий контроля и управления транспортными процессами:
при контроле и управлении большими группировками транспортных средств, а также при решении специальных задач допускается не более 1% сеансов навигации, в которых не выполняются требования но точности. Отсюда требования к доступности данной категории транспортных средств к РНС определяются значением вероятности не менее 0,99;
при контроле и управлении одиночными транспортными средствами допускается доля сеансов, в которых требования по точности не выполняются, до 5%, что обуславливает значение требований к доступности РНС для одиночных транспортных средств на уровне 0,95.
Требования потребителей автомобильно-дорожного комплекса к целостности РНС задаются исходя из возможностей парирования в автоматизированных системах контроля и управления транспортными процессами тех временных интервалов, на которых потребителям поступает с РНС недостоверная (ложная) навигационная информация. Противодействовать такой информации системы управления транспортными процессами могут ограниченное время. Именно численное значение возможного времени противодействия ложной информации в системах диспетчерского контроля и управления с заданным уровнем вероятности, по истечении которого должно поступать сообщение о нарушении функционирования РНС, задается в качестве показателя ее целостности.
В существующих системах диспетчерского контроля и управления транспортными процессами время, затрачиваемое на обнаружение и доведение до потребителя сообщений (команд) об исключении из числа действующих ложных источников навигационных сигналов не должно превышать 15...30 с при вероятности 0,95.
GPS или ГЛОНАСС. Обе системы очень близки но техническим характеристикам и идентичны по принципам функционирования.
Для уменьшения занимаемого частотного диапазона спутники ГЛОНАСС, находящиеся в одной орбитальной плоскости, но по разные стороны Земли и одновременно не видимые, могут работать на одних и тех же литерных частотах, что предусматривается при проведении модернизации системы до 2010 г.
3. Расчет производственной программы ГУП РМЭ "Пассажирские перевозки "
3.1 Общая характеристика ГУП РМЭ "Пассажирские перевозки "
Федеральное государственное унитарное Республики Марий Эл "Пассажирские перевозки" г. Йошкар-Олы создано в соответствии с приказом Министерства автомобильного транспорта РСФСР от 17 мая 1976 г. № 025. Предприятие является коммерческой организацией, находится в ведомственном подчинении Министерства транспорта Российской Федерации. Функции учредителя Предприятия осуществляют Министерство имущественных отношений РФ и Министерство транспорта РФ.
ГУП РМЭ "Пассажирские перевозки" осуществляет следующие основные виды деятельности:
маршрутные перевозки пассажиров автобусами в городском, пригородном и междугородном сообщениях;
заказные перевозки пассажиров;
перевозка пассажиров автобусами, работающими в режиме маршрутного такси;
техническое обслуживание и ремонт автотранспортных средств, их хранение и подготовку к эксплуатации, в том числе по заказам юридических и физических лиц.
К 2000 году износ подвижного состава составил более 80%. Принимая во внимание социальную значимость пассажирского автомобильного
транспорта, Правительство Республики Марий Эл уделяет повышенное внимание развитию отрасли. С этой целью, начиная с 2001 года, парк автобусов республики стал пополняться современными автобусами. За счет средств республиканского бюджета с 2001 по 2007 год приобретено 200 автобусов ПАЗ различной модификации для государственных автотранспортных предприятий республики. Последним крупным мероприятием по обновлению подвижного состава стало приобретение за счет средств республиканского бюджета на условиях лизинга 50 автобусов марки ПАЗ-4230-03 "Аврора" для ГУП Республики Марий Эл "Пассажирские перевозки". Приобретение подвижного состава позволяет жителям республики быстро и своевременно добраться в любую точку республики и ближайшие регионы. Сейчас в Йошкар-Оле 13 автобусных маршрутов, общая протяженность линий - 249 км.
Началом развития автотранспорта в нашей республике стало добровольное общество "Автодор" созданное в 1929 году, занимающееся строительством автомобильных дорог. В этом же году открылись первые курсы шоферов, как филиал Казанской автошколы. Для практического обучения будущих шоферов из Казани была привезена ходовая часть грузового автомобиля "Ford". Группой энтузиастов из числа первых, слушателей курсов шоферов был сделан первый автобус. Кузов автобуса был фанерный, обшит жестью и выкрашен краской вишневого цвета, а верх кузова и крыша краской цвета слоновой кости. Сидения были полумягкие, обиты черным дерматином и располагались вдоль кузова. В автобус вмещалось 12 - 18 человек, за смену с 10 до 16 часов перевозилось 120 - 180 человек. Первым водителем первого автобуса был Померанцев Агафангел Васильевич, 1908 года рождения, всю свою жизнь он посвятил автотранспорту.
В июне 1931 года на этом автобусе встречали гостей, прибывших на празднование 10-летия Марийской автономной области, 21 июня 1931 года он начал курсировать по маршруту '''Гостиница "Онар" - железнодорожный вокзал", следуя по улицам: Советская, Горького, Волкова и опять Советская, потому что часть улицы Советской была в непроезжем состоянии. Это был первый городской маршрут" в Йошкар-Оле.
21 мая 1934 считается Днем рождения транспорта общего пользования в нашей республике.
В июне 1934 года был получен 1 автобус, вышедший из восстановительного ремонта, а к началу 1935 года база Автогужтреста состояла из 2-х грузовых автомашин и 2-х старых автобусов марки ГАЗ-03-30 и рабочих, лошадей.
Постепенно автобусные перевозки в городе Йошкар-Оле начинают развиваться. Маршрут "Железнодорожный вокзал - Гостиница "Онар" продлен до аптеки № 1, открыт новый маршрут "Аптека - Княжна". Вскоре открываются трактовые маршруты из Йошкар-Олы в Сернур, Новый Торьял, Яранск и Санчурск. Но в июне 1941 года началась Великая Отечественная война. Пассажирские перевозки во время войны не осуществлялись. Все лучшие автобусы и автомашины были переданы в Красную Армию. Пассажирские перевозки возобновились только 12 октября 1945 года. К этому времени было получено после восстановительного ремонта 2 автобуса марки ЗИС-16 и 1 автобус ГАЗ-AAA. До конца 1945 года было перевезено почти 60 тыс. пассажиров. Этим занималась Йошкар-Олинская автотранспортная контора. Она же осуществляла грузовые и таксомоторные перевозки. Пассажиры перевозились на автобусах, грузотакси и грузовых автомобилях в попутном направлении.
В феврале 1956 года был подписан приказ №39 "Об организации Йошкар-Олинского пассажирского автохозяйства". В нем говорилось, что на производственной базе ликвидированной Йошкар-Олинской автороты №2 организовать Йошкар-Олинское пассажирское автохозяйство, передав ему автобусы, грузовые и легковые таксомоторы из Йошкар-Олинской АТК, бывшее административное здание и автовокзал по улице Волкова. Парк состоял из 37 автобусов, 24 грузотакси, 10 легковых таксомоторов и 5 хозяйственных автомашин.
Постепенно парк пополнялся. Территория гаража стала мала, и пришлось переносить частные дома, чтобы расширить стоянку. Начинается строительство автостанций в районных центрах республики: Оршанке, Советском, Новом Торъяле, Куженере и т.д. с тем, чтобы создать более комфортные условия для пассажиров и организовать кассовую продажу билетов. В это время пассажирские перевозки осуществляются по 6 городским маршрутам, протяженностью 25,4 км., 3 пригородным: в Семеновку, Кучки и Юшково и 3 междугородним: в Фокино, Оршанку и Новый Торъял. На междугородних маршрутах работали грузотакси.
В предприятии в 1956 году работало 343 человека: из них водителей 132, а ремонтных рабочих 52, - была своя бензоколонка, построена ремонтная мастерская на 6 машиномест.
В период с 1965 по 1967 год в Йошкар-Оле строился первый автовокзал. А 1 января 1968 года автовокзал принял первых пассажиров.
В 1968 году впервые в Йошкар-Оле проведено изучение пассажиропотока силами организационного отдела Минавтотранса РСФСР и отдела пассажирских перевозок Марийского транспортного управления. По результатам изучения пассажиропотока было составлено рациональное расписание, а количество маршрутов в Йошкар-Оле увеличилось с четырех до восьми.
Организация пассажирской центральной диспетчерской станции - ЦДС в ПАТП-1 начата в ноябре 1970 года. Пульты управления движением автобусов были изготовлены собственными силами. Находилась ЦДС в доме №5 по Анисимовскому переулку. В 20 контрольных пунктах в рабочие дни отмечается 100 автобусов, а в выходные и праздничные дни - 81 автобус.
В начале 70-х годов автобусный парк пополняется новыми марками автобусов, более комфортабельными и вместительными. На городских маршрутах курсируют автобусы марки "ЛИАЗ", а на междугородних - "Икарус". Существующей территории гаража явно не хватает. Расширение не возможно по причине плотной застройки со всех сторон.
В 1970 году начинается строительство нового гаража по улице Строителей, 54. В основном строительство гаража было закончено, и он был сдан в эксплуатацию в 1976 году. Это производственный корпус, механическая мойка автобусов, котельная, трансформаторная подстанция, открытая стоянка на 150 автобусов, зона текущего ремонта, склады и т.д.
В 1995 году сдана в эксплуатацию автозаправочная станция на 500 заправок в сутки.
В коллективе Йошкар-Олинского ПАТП-1 имеются люди, которыми по праву гордится предприятие. Это орденоносцы, заслуженные работники автотранспорта РСФСР и Марийской АССР, награжденные Почетными грамотами правительства. Они отмечены государственными наградами за работу в отрасли. Своим добросовестным трудом, уважительным отношением к пассажирам, отличным знанием и бережным отношением к доверенной им технике, показывают пример другим.
3.2 Расчет основных показателей работы подвижного состава
В современных условиях к работе АТП предъявляются все более высокие требования. Основное из которых - высокий уровень технологического оборудования и сооружений, достигаемый путем максимального использования современных материалов и техники. Современные АТП должны иметь высокие показатели по производительности, условиям труда и уровню механизации. Кроме того, должна быть обеспечена высокая эффективность капитальных вложений.
В связи с тем, что предприятие является планово-убыточным, начисление фондов экономического стимулирования производилось из дотации, полученной из бюджета следующим образом: из полученной дотации минусуется сложившийся убыток по городским и пригородным перевозкам, а оставшаяся часть, распределяется на Фонд Накопления и Фонд Потребления по потребности возникающих затрат.
Из общего наличия транспортных средств 60% эксплуатируются в городском сообщении, 27% в пригородном и 13% в междугородном сообщениях. Основой всего комплекса организации пассажирских перевозок является изучение пассажиропотока. При проведении этой работы учитываются потребности населения в перевозках, вносятся коррективы в расписание движения автобусов. Такие изменения более характерны для городских маршрутов.
По городским, пригородным и междугородним перевозкам задействовано более 300 единиц автотранспорта.
Ниже представлена диаграмма изменения пассажирооборота ГУП РМЭ "Пассажирские перевозки" за последние пять лет.
Схема № 2. Изменение пассажиропотока с 2004 - 2009 гг.
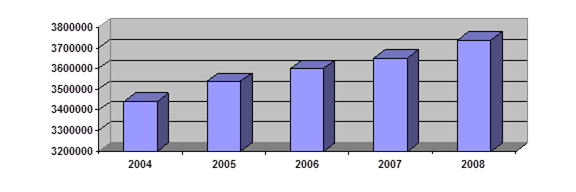
Вывод: как видно из графика пассажиропоток находится на относительно постоянном уровне, при этом имея склонность к увеличению.
Для расчета производственной программы воспользуемся следующими исходными данными:
Списочное количество - Аскк
Средняя грузоподъемность - qн
Коэффициент использования пробега - β
Коэффициент грузоподъемности - γ
Коэффициент вып-ка автомобиля - αв
Техническая скорость - Vт
Время в наряде - t
Среднее расстояние перевозки - ln
Время простоя под погрузкой/разгрузкой - tп-р
Таблица № 2. Основные показатели подвижного состава
| Показатель |
Значение |
| Ас , шт |
280 |
| qн , т |
8 |
| β |
0,45 |
| γ |
0,8 |
| αв |
0,7 |
| Vт , км/ч |
16 |
| t , ч |
14 |
| ln , км |
45 |
| tп-р , ч |
0,5 |
Автомобиле-дни в хозяйстве - АДх
Автомобиле-дни в работе - АДр
Автомобиле-часы в работе - АЧр
Среднесуточный пробег - lсс
Общий пробег - Lобщ
Суточный объем перевозок - Qсут
Суточный грузооборот - Pсут
Годовой объем перевозок - Qгод
Годовой грузооборот - Pгод
Календарные дни - Дк
Расчеты
![]()

![]()
![]()
Таблица № 3. Итоговая таблица расчетов
| Наименование |
Значение |
| АДх , дн |
102200 |
| АДр , дн |
71540 |
| АЧр , ч |
1287720 |
| lсс , км |
207,41 |
| Lобщ , т. км |
14838111,4 |
| Qсут , т |
13,3 |
| Pсут , ткм |
598,5 |
| Qгод , т |
951482 |
| Pгод , ткм |
42816690 |
4. Разработка мероприятий по внедрению системы мониторинга автотранспорта на ГУП РМЭ "Пассажирские перевозки "
Помимо тех неоспоримых удобств, которые общественный транспорт создает в жизни человека, очевидно общественное значение массового его использования: увеличивается скорость сообщения при поездках; увеличивается число штатных водителей; облегчается доставка городского населения в места массового отдыха, на работу и т.д.
Однако процесс автомобилизации не ограничивается только увеличением парка автомобилей. Быстрые темпы развития автотранспорта обусловили определенные проблемы, для решения которых требуется научный подход и значительные материальные затраты. Основными из них являются: увеличение пропускной способности улиц, строительство дорог и их благоустройство, организация стоянок и гаражей. Но обеспечение безопасности движения занимает в этом ряду не последнее место.
В настоящее время в крупных АТП в городах Российской Федерации существует огромное количество проблем, таких как:
координация деятельности различных служб;
управление и контроль работы техники;
управление движением транспортных потоков;
повышение качества транспортного обслуживания населения;
вопросы безопасности;
Для решения вышеперечисленных проблем, предлагается Система Мониторинга Безопасности и Управления подвижными объектами (Locatrans). Такая система позволит обеспечить централизованный контроль и управление подвижными объектами предприятия.
Система мониторинга мобильных объектов позволяет:
Определять местоположение объектов и отображать их на электронной карте;
Определять и отображать параметры движения объектов: скорость, направление движения, пройденный маршрут, места и продолжительность остановок;
Контролировать состояние датчиков, установленных на мобильном объекте;
Удаленно управлять исполнительными устройствами, установленными на мобильном объекте;
Контролировать маршрут движения;
Получать своевременное оповещение о входе или выходе из заданных географических зон;
Пользоваться встроенными стандартными отчетами;
Формировать отчёты по различным показателям за любой период времени;
Формировать архивы о перемещении объектов и происшедших с ними событиях.
Используя систему Locatrans, можно:
увеличить объём перевозок и количество предоставляемых услуг;
снизить аварийность;
продлить срок эксплуатации транспортных средств;
повысить дисциплину персонала;
исключить нецелевое использование транспорта;
оптимизировать расход топлива и ГСМ;
снизить число холостых пробегов транспорта.
Предлагаемая система включает в себя специальные аппаратно-программные решения, позволяющие осуществлять контроль и оперативное управление специальными службами, непрерывный мониторинг транспорта предприятий и организаций, обеспечить персональную безопасность.
Прежде чем определиться с конкретным типом оборудования следует ознакомиться с его основными видами и возможностями.
ГЛОНАСС online является устройством, которое позволяет отслеживать все параметры движения объекта (его координаты, скорость, курс, дату и время, данные датчиков) в режиме "реального времени" и одновременно использовать устройство как "черный ящик".
Рисунок 1. Приемник ГЛОНАСС online

Решаемые задачи:
автономный оперативный контроль состояния транспортного средства (текущих координат, скорости и направления движения, показаний внешних датчиков с привязкой по времени) и управление бортовыми исполнительными устройствами;
двусторонний обмен информацией между диспетчерским центром (ДЦ) и автомобилем (выдача управляющих воздействий и сообщений из ДЦ на бортовые исполнительные устройства автомобиля, передача в ДЦ информации о состоянии автомобиля);
накопление данных о состоянии автомобиля в бортовом запоминающем устройстве (БЗУ) с возможностью их последующего дистанционного извлечения (режим Black Box) по командам из ДЦ.
Таблица № 4. Основные технические данные приемника ГЛОНАСС online
| Точность определения местоположения |
30 м. |
| Скорости движения |
0,5 м/с. (18км/ч) |
| Канал связи |
SMS\Data call\GPRS |
| Допустимое напряжение питания (встроенное зарядное устройство |
12-24 В |
| Габаритные размеры |
100x82x32 мм |
| Масса |
0,35 кг |
| Рабочая температура |
-40……... +85 |
ГЛОНАСС/GPS online является устройством, которое позволяет отслеживать все параметры движения объекта (его координаты, скорость, курс, дату и время, данные датчиков) в режиме "реального времени" и одновременно использовать устройство как "черный ящик".
Решаемые задачи:
автономный оперативный контроль состояния транспортного средства (текущих координат, скорости и направления движения, показаний внешних датчиков с привязкой по времени) и управление бортовыми исполнительными устройствами;
двусторонний обмен информацией между диспетчерским центром (ДЦ) и автомобилем (выдача управляющих воздействий и сообщений из ДЦ на бортовые исполнительные устройства автомобиля, передача в ДЦ информации о состоянии автомобиля);
накопление данных о состоянии автомобиля в бортовом запоминающем устройстве (БЗУ) с возможностью их последующего дистанционного извлечения (режим Black Box) по командам из ДЦ.
Таблица № 5. Основные технические данные приемника ГЛОНАСС/GPS online
| Точность определения местоположения |
15 м. |
| Скорости движения |
0,3 м/с. (10км/ч) |
| Канал связи |
SMS\Data call\GPRS |
| Допустимое напряжение питания (встроенное зарядное устройство |
12-24 В |
| Габаритные размеры |
100x82x32 мм |
| Масса |
0,3 кг |
| Рабочая температура |
-40……... +85 |
ГЛОНАСС offline является устройством, которое позволяет отслеживать все параметры движения объекта (его координаты, скорость, курс, дату и время, данные датчиков) в пострейсовом режиме т.е. использовать устройство как "черный ящик".
ГЛОНАСС offline - это уникальный прибор созданный для работы с Российской спутниковой системой. Основой для него стал "ГЛОНАСС" приемника разработаный и производимый в г. Ижевске.
Решаемые задачи: автономный контроль состояния транспортного средства (текущих координат, скорости и направления движения, показаний внешних датчиков с привязкой по времени).
Рисунок 2. Приемник ГЛОНАСС offline

Особенности:
Обмен информацией между диспетчерским центром (ДЦ) и автомобилем происходит по окончанию рейса (либо отчётного периода, например, раз в неделю) водитель отключает прибор и сдаёт его диспетчеру.
При подключении к компьютеру ГЛОНАСС offline автоматически передаёт данные о рейсе, после чего память прибора так же автоматически очищается, прибор можно отключать от компьютера и возвращать водителю либо оставлять в диспетчерской, до следующего рейса.
Легкость и простота установки на любое транспортное средство
Надежная защита прибора от любых воздействий
Простота диагностики
Минимум внешних контактов
Передача данных по кабелю через USB разъем
Таблица № 6. Основные технические данные приемника ГЛОНАСС offline
| Точность определения местоположения |
30 м. |
| Скорости движения |
0,5 м/с. (18км/ч) |
| Допустимое напряжение питания (встроенное зарядное устройство |
12-24 В |
| Габаритные размеры |
100x82x32 мм |
| Масса |
0,1 кг |
| Рабочая температура |
-40……... +85 |
ГЛОНАСС/GPS offline является устройством, которое позволяет отслеживать все параметры движения объекта (его координаты, скорость, курс, дату и время, данные датчиков) в пострейсовом режиме т.е. использовать устройство как "черный ящик".
ГЛОНАСС/GPS offline - это уникальный прибор созданный для работы с Российской и Американской спутниковой системой. Основой для него стал "ГЛОНАСС/GPS" приемник разработанный Российскими учеными и производимый в г. Смела.
Решаемые задачи: автономный контроль состояния транспортного средства (текущих координат, скорости и направления движения, показаний внешних датчиков с привязкой по времени).
Особенности:
Обмен информацией между диспетчерским центром (ДЦ) и автомобилем происходит по окончанию рейса (либо отчётного периода, например, раз в неделю) водитель отключает прибор и сдаёт его диспетчеру.
При подключении к компьютеру ГЛОНАСС/GPS offline автоматически передаёт данные о рейсе, после чего память прибора так же автоматически очищается, прибор можно отключать от компьютера и возвращать водителю либо оставлять в диспетчерской, до следующего рейса.
Легкость и простота установки на любое транспортное средство
Надежная защита прибора от любых воздействий
Простота диагностики
Минимум внешних контактов
Передача данных по кабелю через USB разъем
Таблица № 7. Основные технические данные приемника ГЛОНАСС/GPS offline
| Точность определения местоположения |
15 м. |
| Скорости движения |
0,3 м/с. (10км/ч) |
| Допустимое напряжение питания (встроенное зарядное устройство |
12-24 В |
| Габаритные размеры |
100x82x32 мм |
| Масса |
0,12 кг |
| Рабочая температура |
-40……... +85 |
Кроме самих передатчиков оправданной будет установка специальных датчиков.
Датчики - это дополнительное оборудование, которое можно установить совместно с бортовыми контроллерами. Система мониторинга будет оповещать Вас о дополнительной информации, получаемой от датчиков. В отчетах Вы сможете проконтролировать эффективность работы мобильных объектов.
Датчики подразделяются на цифровые и аналоговые и подключаются ко входам мобильного терминала, установленного на мобильном объекте.
Цифровые датчики реагируют на замыкание и размыкание контактов (открывание дверей, капота, багажника, крышки бензобака, подъём кузова, нажатие кнопки).
Аналоговые датчики передают напряжение, соответствующее значению измеряемой величины (уровень топлива, температура в салоне мобильного объекта).
Примеры датчиков: тревожная кнопка, датчик зажигания, датчик разгрузки кузова, датчик температуры, датчик подсчета пассажиропотока, датчик открывания и закрывания двери, датчик уровня топлива.
Для создания собственного центра мониторинга необходимо приобрести программный комплекс Locatrans DC и картографические данные Республики Марий Эл.
Программный комплекс Locatrans DC включает в себя программные модули:
Locatrans Server - программное обеспечение для сбора, хранения, обработки и передачи данных. В состав Locatrans Server входит свободно распространяемая база данных MS SQL Server 2005 Express Edition;
Locatrans Admin - программное обеспечение администратора центра мониторинга, обеспечивающее настройку сервера с целью добавления, удаления и конфигурирования мобильных объектов и программ диспетчера;
Locatrans Client - программа диспетчера.
Схема № 3. Структурная схема взаимодействия программных модулей комплекса Locatrans DC
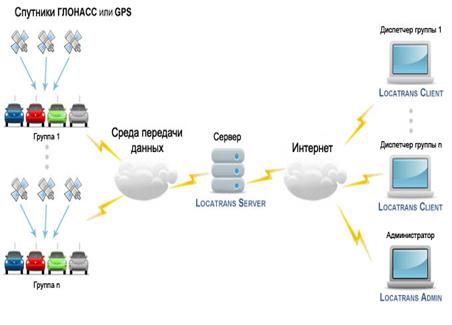
Если на предприятии к центру мониторинга подключено малое количество автомобилей, и нагрузка на программно-аппаратный комплекс не велика, программные компоненты комплекса Locatrans DC могут быть установлены на одном компьютере.
Схема № 4. Малая структурная схема взаимодействия программных модулей комплекса Locatrans DC

Для рассматриваемого предприятия ГУП РМЭ "Пассажирские перевозки" выбираем первую схему, так как расчетное количество автобусов превышает 200 единиц.
Программа администратора (Locatrans Admin) дает возможность настройки, добавления и удаления диспетчеров, мобильных объектов, мобильных терминалов, групп транспортных средств.
С помощью программы администратора автомашины, принадлежащие предприятию, могут объединяться в группы. Доступ к информации об автомобилях разных групп может предоставляться разным диспетчерам.
Диспетчерам могут присваиваться различные статусы c различными правами по использованию программы Locatrans Client.
Таблица № 8. Требования к программно-аппаратному обеспечению комплекса Locatrans DC
| Устройство |
Значение |
| Процессор |
1,5-2 ГГц |
| ОЗУ |
512 Мб |
| HDD |
80 Гб |
| Сеть |
100 Мб/сек |
| Привод |
DVD+R |
| Порт |
USB |
| ОС |
MS Windows XP Prof SP2 /2003 Server / Vista |
Для работы программы Locatrans Server в состав комплекса входит свободно распространяемая база данных MS SQL Server 2005 Express Edition.
В своей работе Программа Locatrans использует картографические наборы данные различных территорий:
текущего местоположения автомобиля;
пройденных маршрутов;
контролируемых зон (просмотр, создание и редактирование зон);
местоположения автомобилей в момент свершения различных событий, например, срабатывания датчика, превышения скорости;
мест стоянок.
Для пользователей Услуги мониторинга и для компаний, создающих собственные центры мониторинга, предоставляется большой набор картографических данных:
Европейские страны (М1: 500.000);
Россия (М1: 1.000.000);
Субъекты Российской Федерации (М1: 200.000);
Города России (М1: 10.000, М1: 25.000 и М1: 50.000).
Создание центра мониторинга на АТП будет поручено непосредственно зам. начальника по перевозкам. Под его руководством будет постепенно переформирована группа по организации движения. На первом этапе, этапе отладки работы внедренной системы планируется параллельно оставить старую диспетчерскую систему. В ведомстве центрального диспетчера не появиться новые специалисты. Достаточно будет переподготовить старых диспетчеров. Весь подвижной состав условно разделим на 4 группы в зависимости от графика и загруженности диспетчера. За каждой группой закрепим специалиста-диспетчера, таким образом, в зоне контроля будет около 40-50 автобусов единовременно. Система мониторинга GPS/Глонасс - GSM способна обеспечить функционирование в данном режиме.
Программа внедрения системы мониторинга транспорта "WEB-GPS/GSM-Глонасс/GSM" предусматривает закупку 280 приборов ГЛОНАСС/GPS online, а так же такого же числа набора технических средств "АвтоГРАФ/GSM-Лайт". Данный набор средств обеспечит бесперебойную связь с автотранспортом на линии.
Следующим этапом станет установка оборудования на транспорте. Вся операция достаточно проста и требует не более 20 минут времени. Специальных навыков не нужно, услуга установки системы входит в стоимость комплекта.
Установка оборудования не требует выделения какой-либо особой зоны в АТП. Предлагаем провести установку в зоне хранения во время, когда подвижной состав не занят на линии.
На ГУП РМЭ "Пассажирские перевозки" применяется обычная схема работы с подвижным составом во время приема автобусов с линии. Работа с подвижным составом осуществляется по схеме, приведенной ниже.
Схема № 5. Схема работы с подвижным составом на АТП
![]()
Одновременно с установкой приборов и датчиков на подвижной состав проводим переоснащение диспетчерской. Запланировано приобретение ПК, соответствующие требованиям, изложенным в таблице №8.
Установка программного обеспечения так же входит в стоимость поставки комплекта.
Таким образом, внедрение системы мониторинга автотранспорта на предприятии ГУП РМЭ "Пассажирские Перевозки" не требует снятия транспорта с линии и появления в структуре организации нового отдела.
5. Безопасность жизнедеятельности при внедрении и использовании системы мониторинга "WEB-GPS/GSM-Глонасс/GSM "
5.1 Организационно-правовые основы охраны труда
Основной структурой, выполняющей организацию охраны труда на АТП, является отдел безопасности движения, в подчинении которого находится медпункт. Функции по охране труда возложены на этот отдел. Согласно типовому положению, отдел охраны труда и безопасности движения является самостоятельным структурным подразделением и подчиняется зам. начальника по перевозкам. На отдел возлагается ответственность за подготовку и организацию работы на АТП по созданию здоровых и безопасных условий труда работающих, по предупреждению несчастных случаев на производстве и профессиональных заболеваний. Кроме отдела по охране труда за создание здоровых и безопасных условий труда несут ответственность руководители всех структурных подразделений.
В качестве основного элемента и метода предупреждения травматизма сред рабочих является система инструктажей. По характеру и времени проведения инструктажи бывают:
Вводный инструктаж.
Проводится для всех работников, поступающих на работу на предприятие. Проводит инженер по охране труда в кабинете по охране труда
в виде лекции или беседы. Освещаются вопросы: специфика работ на предприятии, режим работы, расположение производственных участков, порядок движения по территории, нормы выдачи спецодежды, спецпитания, электробезопасность, пожарная безопасность, приемы оказания первой медицинской помощи.
О проведении инструктажа делают запись в журнале регистрации вводного инструктажа (контрольном листе) с обязательными подписями инструктирующего и инструктируемого.
Первичный инструктаж на рабочем месте.
Проводит непосредственный руководитель работ, к которому поступает работник.
Освещаются вопросы: безопасные приемы труда на оборудовании на данном месте, правила пользования спецодеждой, инструментом, проходами, сигнализацией.
После проведения первичного инструктажа заполняется вторая часть контрольного листа и журнал. Контрольный лист сдается в отдел кадров (в личное дело работника).
Повторный инструктаж.
Проводится один раз в 6 месяцев, для работников, работающих на участках с повышенной опасностью - раз в 3 месяца.
Освещаются вопросы вводного инструктажа и инструктажа на рабочем месте. Его проводят с целью закрепления знаний безопасных приемов и методов труда.
Дополнительный инструктаж.
Проводят в объеме первичного инструктажа на рабочем месте при изменении правил по охране труда, технологического процесса, при вводе в эксплуатацию нового оборудования, при несчастных случаях, при изменении места работы.
Целевой инструктаж.
Проводится для работников перед выполнением работ с повышенной опасностью, допуск к которым оформляется нарядом-допуском.
Этот инструктаж фиксируют в наряде-допуске на производство работ и в журнале регистрации инструктажа на рабочем месте.
На предприятии постоянно осуществляется административно-общественный контроль за состоянием охраны труда. Контроль проводится в пять этапов:
Первая ступень.
Ежедневно перед работой мастер, старший мастер, механик или бригадир совместно с общественным инспектором по охране труда обходят все рабочие места. Проверяют подведомственные участки. Замеченные недостатки устраняются.
Вторая ступень.
Еженедельно начальником цеха, начальником гаража, колонны или отряда, главным механиком совместно с представителем профкома. Проверяют состояние охраны труда в цехе, гараже, мастерских. Выявленные недостатки устраняются.
Третья ступень.
Ежемесячно комиссия в составе руководителя или главного инженера предприятия, председателя профсоюзного комитета, инженера по охране труда, главного механика, проверяет предприятие. Замеченные недостатки устраняются или записываются в журнал, где указывают недостатки, ответственного за исполнение и срок исполнения.
Четвертая ступень.
Выполняется два раза в год руководством генерального директора объединения, председателя профсоюзного комитета комиссией, в состав которой входят все члены комиссии при третьей ступени контроля. Проверяется все предприятие.
Пятая ступень.
Проводится ежегодно в порядке внутриведомственного контроля при проведении ревизий или других проверок комиссией из министерства, представителями пожарного надзора, техническим инспектором профсоюзов, представителем Гостехнадзора.
5.2 Инструкция по технике безопасности при проведении работ по установке GPS-глонасс/GSM передатчиков на транспортное средство
Общие требования безопасности.
1.1 К работе допускаются липа мужского пола не моложе 18 лет, прошедшие медицинское освидетельствован не.
1.2 Специалист по установке оборудования обязан проходить предварительный и периодический медицинский осмотр.
1.3 - При поступлении на работу, специалист по установке оборудования, обязан пройти вводный инструктаж по ОТ и ПБ в отделе охраны труда предприятия, первичный инструктаж на рабочем месте по установленной программе.
1.4 Не реже одного раза в 3 месяца специалист по установке оборудования обязан пройти повторный инструктаж с проверкой знаний правил эксплуатации обслуживаемого оборудования и требований ОТ и ПБ в комиссии цеха. Перед допуском слесаря к самостоятельной работе после стажировки не менее 2-х смен результаты проверки и инструктажа оформляются в личной карточке прохождения обучения по ОТ и ПБ.
1.5 Специалист обязан проходить ежегодную проверку знаний правил безопасности в комиссии цеха по утвержденным экзаменационным билетам.
1.6 специалист по установке оборудования, обязан работать в установленное время и выполнять только порученную им работу по письменному наряду.
1.7 Запрещается, исключая аварийные ситуации, выполнять не порученные ответственным руководителем работы.
1.8 Специалист по установке оборудования обязан:
1.8.1 Выполнять правила внутреннего распорядка;
1.8.2 Помнить о личной ответственности за соблюдение правил охраны труда и за безопасность окружающих па работе;
1.8.3 Во время работы пользоваться спецодеждой, спецобувью, предохранительными приспособлениями, средствами индивидуальной защиты согласно установленным нормам:
1.8.4 Не допускать присутствия на рабочем месте посторонних лиц;
1.8.5 Не выполнять распоряжений, если они противоречат правилам безопасности;
1.8.6 Уметь оказать первую (доврачебную) помощь пострадавшему согласно "Инструкции по оказанию первой помощи" на производстве, доложить руководителю работ о допускаемых нарушениях и самому принять все меры по устранению нарушений правил ОТ к ПБ:
1.9 В процессе работы на специалиста воздействуют следующие опасные и вредные производственные факторы:
1.9.1 Движущиеся автомобили, машины и механизмы; незащищенные подвижные и вращающие части производственного оборудования;
1.9.2 Повышенные запыленность и загазованность воздуха рабочей зоны;
1.9.3 Повышенные уровни шума и вибрации на рабочем месте;
1.9.4 Незащищенные токоведущие части электрооборудования
1.9.5 Вредный компонент в применяемых материалах, воздействующий через кожный покров, дыхательные пути, пищеварительную систему и слизистые оболочки зрения и обоняния;
1.10 С целью предохранения от воздействия опасных и вредных производственных факторов специалист обязан применять средства защиты в соответствии с "Типовыми отраслевыми нормами ".
1.11 Специалист по установке оборудования обязан выполнять правила пожарной безопасности в соответствии с требованиями Инструкции пожарной безопасности на ГУП РМЭ "Пассажирские перевозки".
1.12. Запрещается курение вне специально отведенного для этих целей места, пользование открытым огнем для подогрева емкости и агрегатов, заполненных горюче-смазочными материалами.
1.13. Рабочее место должно содержаться в чистоте; подтеки, и проливы ГТМ должны быть немедленно убраны.
1.14. Все легко воспламеняющие материалы (горюче-смазочные, обтирочные) должны хранится в закрытой металлической таре.
1.15. Запрещается загромождать проезды, подъезды к пожарным гидрантам, подступы к пожарным кранам, щитам и огнетушителям.
1.16. При обнаружении пожара, специалист по установке оборудования обязан:
1.16.1. Немедленно сообщить об этом в подразделение пожарной охраны по телефону 01 или.
1.16.2 Приступить к тушению очага пожара имеющими средствами пожаротушения;
1.16.3 Принять меры по вызову к месту пожара непосредственного руководителя работ;
1.17. При несчастном случае необходимо оказать первую помощь пострадавшему, доложить непосредственному руководителю работ о травме, вызвать медпомощь по телефону 03, принять меры к сохранению обстановки на месте происшествия.
1.18. На рабочем месте или вблизи него использовать медицинскую аптечку, которую своевременно должны пополнять необходимыми медикаментами.1.19. Лица, виновные в нарушении настоящей инструкции, привлекаются к ответственности в установленном законодательном порядке.
Требования безопасности перед началом работ.
2.1 Перед началом работы, специалист по установке оборудования обязан: получить письменный наряд на производство работе росписью в книге нарядов, а на работах повышенной опасности - наряд-допуск установленной формы. Привести в порядок спецодежду, чтобы одежда была хорошо подогнана и застегнута, не мешала движению, иметь головной убор, подобрать необходимый инструмент, средства защиты, проверить их исправность, сроки их очередной проверки или испытания.
2.2 Осмотреть рабочее место, привести его в порядок, убрать посторонние предметы, устранить разлитые горюче-смазочные материалы при помощи опилок.
2.3 Рабочее место должно быть хорошо освещено, не загромождено деталями, соблюдать необходимые габариты проходов.
Требования безопасности во время работы
3.1 Установка оборудования должна выполняться в предназначенных для этого местах, оборудованных устройствами, необходимыми для выполнения установленных работ.
3.2 Работы по установке оборудования производятся под непосредственным руководством мастера.
3.3 Перед тем, как приступить к работе, специалист обязан убедиться в том, что оборудование установлено на предназначенное место, надежно закреплено и находится в устойчивом положении.
3.4 Требования к оборудованию и механизмам:
3.4 1 Все эксплуатируемое оборудование должно находиться и полной исправности. Опасные места должны быть ограждены;
3.4 2 Оборудование, изготавливаемое собственными средствами, а также все оборудование после капитального ремонта должно отвечать требованиям правил техники безопасности, предъявляемым к новому оборудованию.;
3.5 Требования к инструменту:
3.5.1. Ключи подбираются соответственно размерам гаек и болтов. Запрещается:
работать гаечными ключами с непараллельными изношенными губками;
увеличивать длину гаечного ключа за счет применения дополнительных рычагов (одевание труб, ключей и т.п.);
отвертывать гайки с помощью молотка и зубила;
3.5 2 Раздвижные ключи не должны иметь слабины в подвижных частях. Грани гаек и болтов, а также резьбы должны быть правильными и неизношенными.
3.5 3 Слесарные тиски должны быть в полной исправности, крепко захватывать изделие и иметь на губках несработанную насечку.
3.5 4 Электроинструменты хранятся в инструментальной и выдаются после предварительной проверки.
Запрещается присоединять электрический инструмент выше 42 V к электросети без штепсельного соединения.
Требования безопасности в аварийных ситуациях
4.1 В аварийной ситуации, специалист по установке оборудования обязан знать: Расположение щитов освещения, рубильников отключения оборудования от сети напряжения.
4.2 При возникновении пожара, принять меры к тушению всеми имеющимися средствами, а при невозможности тушения своими силами, покинуть здание согласно плана эвакуации, вызвать ПЧ по тел.01;
4.3 При оказании первой доврачебной помощи необходимо выполнять " Инструкцию по оказанию первой помощи"
4.4 Знать и соблюдать все требования, изложенные в планах ликвидации возможных аварий на участке и в цехе.
Требования безопасности по окончании работ
5.1 Привести в порядок инструменты и приспособления, протереть и уложить на постоянные места хранения
5.2. Произвести уборку рабочего места.
5.3 Вымыть руки и лицо теплой водой с мылом или принять душ.
5.4 Обо всех недостатках, обнаруженных во время работы, специалист по установке оборудования, обязан сообщить мастеру или начальнику участка.
6. Технико-экономическое обоснование проекта
6.1 Основные понятия инвестиционной деятельности
Согласно Федеральному Закону "Об инвестиционной деятельности в Российской Федерации, осуществляемой в форме капитальных вложений" от 25.02.99. №39-ФЗ: инвестициями являются денежные средства, ценные бумаги, иное имущество, в т. ч. имущественное право, иные права, имеющие денежную оценку, вкладываемые в объекты предпринимательской и (или) достижения иного полезного эффекта.
Капитальные вложения - инвестиции в основной капитал (основные средства), в том числе затраты финансовых, трудовых и материальных ресурсов:
на новое строительство, расширение, реконструкцию, техническое перевооружение действующих предприятий;
на приобретение машин, оборудования, инструмента;
на проектно-изыскательные работы;
на другие затраты.
Инвестиционный проект - обоснование экономической целесообразности, объема и сроков осуществления капитальных вложений, в то числе необходимая проектно-сметная документация, разработанная в соответствии с законодательством Российской Федерации, и утверждена в соответствии с установленными стандартами (нормами, правилами), а так же описание практических действий по осуществлению инвестиций (бизнес-план).
В то же время в соответствии с "Методическими рекомендациями по оценке эффективности инвестиционных проектов", утверждена Госстроем РФ, Министерством экономики РФ, Министерство финансов РФ, Госкомпромом РФ 31 марта 1992г №7-12/41, понятие инвестиционный проект может употребляться в следующих значениях:
дело, деятельность, мероприятия, осуществление комплекса каких-либо действий, обеспечение достижение определенных целей (получение определенных результатов). Близким по смыслу в этом случае являются термины "хозяйственное мероприятие", "научно-техническое мероприятие", "комплекс работ", "проект";
система организационно-правовых и расчетно-финансовых документов, необходимых для осуществления каких-либо действий, или описание этих действий.
В экономической части дипломного проекта выполнены расчеты по определению экономической эффективности от внедрения системы мониторинга транспортных средств "WEB-GPS/GSM-Глонасс/GSM":
Для обоснования эффективности инвестиций необходимо определить размер инвестиций в проект на проведение указанных мероприятий в настоящее время. Наряду с этим определяются основные расходы на эксплуатацию и содержание подвижного состава. В итоге экономия от снижения издержек и затрат будет характеризовать эффективность вложений.
Стоимость закупаемого оборудования рассчитана по ценам на 1 мая 2009 года, показатели работы ГУП РМЭ "Пассажирские перевозки" беруться за последний год.
6.2 Определение стоимости комплекса мероприятий по внедрению системы мониторинга
Основным документом, определяющими стоимость мероприятий являются сводный сметный расчет, в котором, сгруппированы затраты по их назначению. В расчет должны быть включены резервные суммы на непредвиденные работы. Расценки на монтажные работы охватывают полный комплекс работ. Составной частью сметных норм является приложения, которые содержат перечень материалов. Сметная стоимость за вычетом возвратных сумм представляет собой величину капитальных вложений.
При разработке сметы работ, необходимо учитывать следующие виды работ:
приобретение комплекта устройств "Локотранс"
приобретение комплекта устройств "АвтоГраф GSM-лайт"
приобретение ПК для станции администратора.
приобретение интернет трафика.
6.3 Расчет экономической эффективности
Для расчета экономической эффективности рассмотрим основные статьи расходов, данные по которым предоставлены ГУП РМЭ "Пассажирские перевозки". В итоговом отчете представлены основные статьи расходов организации за отчетный период. В их число входит затраты на фонд оплаты труда, социальные отчисления, затраты на ТО и Р, автомобильное топливо и др.
Таблица № 9. Калькуляция себестоимости перевозок
| Статьи |
Сумма, тыс. руб. |
Структура, % |
| Фонд оплаты труда |
73320,5 |
26,7 |
| Отчисления на социальные нужды |
19063,5 |
7 |
| Автомобильное топливо |
116151 |
42,3 |
| Смазочные материалы |
23230,2 |
8,5 |
| Затраты на восстановление шин |
9078 |
3,3 |
| Затраты на ТО и Р |
3698,5 |
1,3 |
| Амортизационные отчисления |
20000 |
7,3 |
| Налоги |
5632 |
2,05 |
| Прочие расходы |
4475 |
1,7 |
| Итого |
274648,7 |
100% |
Финансовая деятельность АТП строится на товарно-денежных отношениях, связанных с кругооборотом средств в процессе производства.
Выручка представляет собой денежные средства, полученные от выполнение услуги. Выручка пассажирского АТП от перевозочной деятельности определяется на основе тарифов на перевозку.
Общая выручка от перевозочной деятельности за 2008 год составляет 255328,6. Чистый убыток составляет 19320,1тыс. рублей за отчетный год.
Таким образом предприятие является планово-убыточным.
Определим размер капитальных вложений.
Таблица № 10. Затраты на проектируемые мероприятия
| Показатель |
Значение показателя |
Структура |
| Приемники Глонасс/GPS онлайн. |
9700 |
19,8 |
| АвтоГраф GSM-лайт |
2300 |
4,7 |
| ПК (сервер) |
37000 |
75,5% |
| Итого |
100% |
Таблица 11. Текущие затраты на оборудование средств мониторинга
| Показатель |
Значение показателя |
Структура |
| Сотовая связь |
1680000 |
97,4 |
| Выделенная сеть (в мес). |
45600 |
2,6 |
| Итого |
1725600 |
100% |
Стоимость установки датчиков и приемников входит в стоимость комплекта. Общая сумма вложений таким образом составит:
(9700+2300) *280 = 3360000 руб.
Требуется Интернет на 12 месяцев, сотовая связь с каждым ТС в год и покупка комплектов систем на 280 автобусов. Кроме того для станции администратора и клиентов необходимо 4 ПК.
Внедрение системы мониторинга направлено прежде всего на снижение издержек. Как показывает опыт, внедрение системы мониторинга позволяет снизить норму расхода топлива на 7-15 процентов. (данный показатель рассчитан для АТП с парком превышающим 200 ТС). Прежде всего это достигается путем установления контроля за ТС на линии и повышения ответственности водителей. Для расчета берем минимальный показатель в 7%.
Рассчитаем норму расхода топлива после внедрения результатов проекта.
(116151000 * 93) /100 = 108020430 руб.
Таким образом внедрение результатов проекта позволит сэкономить на использовании топлива:
116151000 - 108020430 = 8130570 руб. в год.
Определим срок окупаемости проекта:
Qr
=![]() ,
,
Где K - размер капитальных вложений
![]() - Эффект от внедрения
- Эффект от внедрения
![]() = 274648700 - (266518130 + 1725600) = 6404970 руб.
= 274648700 - (266518130 + 1725600) = 6404970 руб.
K = 37000*4+ (2300+9700) *280 = 3508000
QT = 3508000/ 6404970 = 0.55
Срок окупаемости нововведений - 7 месяцев.
| Экономические показатели проекта |
||
| Калькуляция |
||
| Статьи |
Сумма, тыс. руб |
Структура, % |
| Фонд оплаты труда |
73320,5 |
26,7 |
| Отчисления на социальные нужды |
19063,5 |
7 |
| Автомобильное топливо |
116151 |
42,3 |
| Смазочные материалы |
23230,2 |
8,5 |
| Затраты на восстановление шин |
9078 |
3,3 |
| Затраты на ТО и Р |
3698,5 |
1,3 |
| Амортизационные отчисления |
20000 |
7,3 |
| Налоги |
5632 |
2,05 |
| Прочие расходы |
4475 |
1,7 |
| Итого |
274648,7 |
100% |
| Капитальные вложения |
||
| Приемники Глонасс/GPS онлайн. |
2716000 |
19,8 |
| АвтоГраф GSM-лайт |
644000 |
4,7 |
| ПК (сервер) |
148000 |
75,5% |
| Итого |
3508000 |
100% |
| Текущие затраты на обслуживание |
||
| Сотовая связь |
1680000 |
97,4 |
| Выделенная сеть (в мес). |
45600 |
2,6 |
| Итого |
1725600 |
100% |
| Эффект от внедрения проектируемых мероприятий |
||
| 6404970 |
||
| Срок окупаемости |
||
| 7 месяцев. |
||
Вывод: таким образом можно сделать о целесообразности внедрения предложенных мероприятий на ГУП РМЭ "Пассажирские перевозки".
Заключение
Уровень транспортного обслуживания населения в социальном секторе находится на достаточно высоком уровне. Пристальное внимание правительства республики обеспечивает отрасль новыми видами транспорта. Именно благодаря планомерной смене подвижного состава удается поддерживать коэффициент технической готовности на предприятии ГУП РМЭ "Пассажирские перевозки" на высоком уровне. По городским, пригородным и междугородним перевозкам задействовано более 200 единиц автотранспорта.
Весте с тем предприятие остается планово-убыточным. Именно поэтому особенно важно пытаться максимально оптимизировать маршруты сообщений и снижать общий уровень издержек.
Именно с этой целью необходимо внедрять новые технологии, которые позволяют управлять производственным процессом АТП на качественно новой основе.
В дипломном проекте был предложен комплекс мероприятий, включающий в себя: приобретение датчиков и приемников типа "Локатранс", а так же средств связи "АвтоГраф - GSM-лайт" для постоянной связи с автотранспортом на линии. План установки этого оборудования на автобусы, и изменение схемы работы диспетчерской службы.
В целом после проведения мероприятий снижаются на 15-20% расход топлива, существенно повышается рабочая дисциплина и оптимизируются графики маршрутов.
Оценка экономических показателей свидетельствует о
целесообразности введения мероприятий. Годовая экономия от снижения количества дорожно-транспортных происшествий исчисляется в миллионом масштабе, а затраты на внедрение мероприятий окупаются в течении трех месяцев работы.
Список используемой литературы
1. Амбарцумян В.В. Экологическая безопасность автомобильного транспорта. - М.: Научтехлитиздат, 1999. - 208 с.
2. Экономика отрасли: учебное пособие по курсовому и дипломному проектированию /Ахмадеева М.М., Каткова Т.Е. - Йошкар - Ола: МарГТУ, 2006. - 128 с.
3. Балабаева И. Особенности функционирования общественного пассажирского транспорта... / И. Балабаева // Автомобильный транспорт. - 2004. - N 4.
4. Блудян Н.Н. Анализ реформирования пассажирского автомобильного транспорта за рубежом // Автомобильный транспорт. 2005. №1.
5. Васильев В. Все на благо пассажира/В. Васильев // Автомобильный транспорт. - 2004. - N 5.
6. Васильев В. Наземный общественный транспорт - на новый уровень /В. Васильев // Автомобильный транспорт. - 2004. - N 4.
7. Половинкин П.Д. Хозяйственные риски в инновационной деятельности: классификация, методы количественной оценки и пути снижения - М.: РАГС, 1997
8. Филипов П. Иллювиева Е. Бизнес-план вашего предприятия. - СП б.: Норма, 2000 г.
9. Шайкин В. Маркетинг транспортных услуг // Маркетинг. - 1996. - №5
10. Харисова В.Н. Глобальная Спутниковая радионавигационная система глонасс. М. ИПРЖР 2003 г.
11. http://www.navgeocom.ru/
12. http://www.gpssoft.ru/glonass.html
13. http://www.trivi.ru
14. http://www.barl.ru/index. php? mod=content&id=126
15. http://www.locatrans.ru/
16. http://www.sleda.ru/
17. http://www.fobosgps.ru/stp/tex_xar/
18. http://glonass-gps. blogspot.com/
Похожие рефераты:
Электронные системы отображения навигационных карт
Навигационные комплексы Гланасс и Новстар
Защита от средств слежения за автомобилями
Контроль за движением автобусов городского сообщения РДАУП "Автобусный парк № 1" г. Гомеля
Внедрение навигационных систем на муниципальным транспорте
Система глобального позиционирования
Спутниковые системы местоопределения
Спутниковые системы навигации GPS и ГЛОНАСС
Применение на судовых станциях автоматических идентификационных систем
Навигационный проект перехода судна типа УПС "Святая Ольга", по маршруту порт Туапсе – порт Дуресс
Системы подвижной спутниковой связи на основе низкоорбитальных ИСЗ
Навигационный проект перехода судна типа "Днепр", по маршруту порт Херсон – порт Кальяри
Навигационный проект перехода судна типа "Сормовский" по маршруту порт Ялта – порт Бриндизи
Навигационный проект перехода судна типа "Днепр" по маршруту порт Сочи – порт Монфальконе