| Скачать .docx |
Курсовая работа: Проектирование асинхронных двигателей
Содержание
1. Введение
2. Расчет и конструирование двигателя
2.1. Выбор главных размеров
2.2. Расчет обмотки статора
2.3. Расчет размеров зубцовой зоны статора и выбор воздушного зазора
2.4. Расчет ротора
2.5. Расчет магнитной цепи
2.6. Расчет параметров рабочего режима
2.7. Расчет потерь
2.8. Расчет рабочих характеристик
2.9. Расчет пусковых характеристик
3. Моделирование двигателя в среде MatLab Power System Blockset
3.1. Моделирование с параметрами номинального режима
3.2. Моделирование с параметрами пускового режима
1. Введение
Асинхронные машины получили наиболее широкое применение в современных электрических установках и являются самым распространенным видом бесколлекторных электрических машин переменного тока. Как и любая другая электрическая машина, асинхронная машина обратима и может работать как в генераторном, так и в двигательном режимах. Однако преобладающее применение имеют асинхронные двигатели, составляющие основу современного электропривода. Области применения асинхронных двигателей весьма широки – от привода устройств автоматики и бытовых электроприборов до привода крупного горного оборудования (экскаваторов, дробилок, мельниц и т.д.). В соответствии с этим мощность асинхронных двигателей, выпускаемых электромашиностроительной промышленностью, составляет диапазон от долей ватт до тысяч киловатт при напряжении питающей сети от десятков вольт до 10 кВ. Наибольшее применение получили трехфазные асинхронные двигатели, рассчитанные на работу от сети промышленной частоты (50 Гц).
В данном курсовом проекте рассматривается следующий двигатель:
Исполнение по степени защиты: IP44 – по первой цифре соответствует защите от возможности соприкосновения инструмента, проволоки или других подобных предметов, толщина которых превышает 1 мм, с токоведущими или движущимися частями внутри машины; по второй цифре – защите от водяных брызг любого направления, попадающих на оболочку.
Способ охлаждения: IC141 – двигатель, обдуваемый наружным вентилятором, расположенным на валу машины.
В качестве аналога проектируемому двигателю выбран следующий двигатель:
4А200L6У3.
Климатические условия работы: У3 – по букве – для умеренного климата; по цифре – для размещения в закрытых помещениях с естественной вентиляцией без искусственно регулируемых климатических условий, где колебания температуры и влажности воздуха, воздействия песка и пыли, солнечной радиации существенно меньше, чем на открытом воздухе (каменные, бетонные, деревянные и другие неотапливаемые помещения).
В ходе выполнения всего курсового проекта будут проводиться сравнения между проектируемым и аналоговым двигателем.
2. Расчет и конструирование двигателя
2.1. Выбор главных размеров
2.1.1. Синхронная частота вращения, об/мин:
![]() об/мин.
об/мин.
2.1.2. Наружный диаметр статора Da = 349 мм = 0,349 м. [4, стр.164]
2.1.3. Внутренний диаметр статора D = Kd* Da, где Kd – коэффициент, характеризующий отношения внутренних и наружных диаметров сердечников статоров асинхронных двигателей серии 4А. Согласно рекомендациям [4, стр.165] принимаем Kd = 0,72.
D = 0,72*349 = 251 мм = 0,251 м.
2.1.4. Полюсное деление τ = π D/2р = 3,14*0,251/2*3 = 0,131 м.
2.1.5. Расчетная мощность:
![]() , где η = 0,91 [4, стр.165], соsφ = 0,89 [4, стр.165].
, где η = 0,91 [4, стр.165], соsφ = 0,89 [4, стр.165].
![]() кВт.
кВт.
2.1.6. Выбираем предварительно электромагнитные нагрузки, следуя рекомендациям [4, стр.166]: А = 34500 А/м, Вδ = 0,8 Тл.
2.1.7. Обмоточный коэффициент для двухслойной обмотки принимаем (предварительно) ![]() = 0,925.
= 0,925.
2.1.8. Расчетная длина магнитопровода:
 , где Ω – угловая скорость вращения ротора, рад/с;
, где Ω – угловая скорость вращения ротора, рад/с; ![]() рад/с.
рад/с.
![]() м.
м.
Отношение λ = lδ / τ = 0,192/0,131= 1,466. λ находится в допустимых пределах.
2.1.9. Сравним данные расчетного двигателя с данными двигателя-аналога:
| Вид двигателя |
Da, м |
D, м |
lδ , м |
η |
соsφ |
| Расчетный |
0,349 |
0,251 |
0,192 |
0,91 |
0,89 |
| Аналоговый |
0.349 |
0.25 |
0.185 |
0,905 |
0,9 |
Величины токовой линейной нагрузки, индукции в воздушном зазоре и длина магнитопровода будут уточнены в следующем разделе.
2.2 Расчет обмотки статора
2.2.1 Выбираем предельные значения зубцовых делений, основываясь на [4, стр.170]
tmax = 0,0145 м,
tmin = 0,0111 м.
2.2.2. Вычисляем число пазов статора:
![]() ,
,
![]() .
.
Число пазов на полюс и фазу ![]() .
.
Так как число пазов на полюс и фазу в большинстве асинхронных машин общепромышленного применения желательно принимать целым, то, исходя из этих условий, берем Z = 72 Þ ![]() .
.
2.2.3. Зубцовое деление статора (окончательно): ![]() м.
м.
2.2.4. Число эффективных проводников в пазу (число параллельных ветвей обмотки а первоначально принимаем равным единице):
 , где I1н
– номинальный ток обмотки статора.
, где I1н
– номинальный ток обмотки статора.
 А.
А.
![]() .
.
2.2.5. Берем число параллельных ветвей а = 3, тогда Uп = а U’п = 3*11,7 = 35,1.
Так как используется двухслойная обмотка, то желательно применение четного числа эффективных проводников в пазу, Þ берем Uп = 36.
2.2.6. Рассчитываем число витков в фазе обмотки (окончательно):
![]() .
.
2.2.7. При определении числа эффективных проводников в пазу были использованы округления, что привело к некоторому несоответствию исходных и рассчитанных данных, поэтому пересчитаем линейную токовую нагрузку и индукцию в воздушном зазоре.
![]() А/м. А находится в допустимых пределах.
А/м. А находится в допустимых пределах.
Поскольку возросла линейная токовая нагрузка, то должна уменьшиться длина магнитопровода: ![]() м, что действительно произошло.
м, что действительно произошло.
λ = lδ / τ = 0,186/0,131= 1,42 – в рекомендуемых пределах, Þ при дальнейших расчетах принимаем lδ = 0,186 м.
Магнитный поток: Ф =  , где
, где ![]() - окончательное значение обмоточного коэффициента.
- окончательное значение обмоточного коэффициента.
Kоб1 = КУ *КР , где КУ - коэффициент укорочения, КР - коэффициент распределения.
![]() , где β – расчетное укорочение шага обмотки.
, где β – расчетное укорочение шага обмотки.
![]() ,
,
![]() .
.
 .
.
Kоб1 = 0,966*0,958 = 0,925.
![]() мВб.
мВб.
Проверяем значение магнитной индукции в воздушном зазоре:
![]() Тл.
Тл.
2.2.8. Плотность тока в обмотке статора (предварительно):
J1
= (AJ1
)/ A= (201*109
)/ (35.6*103
)= 5,65*106
А/м2
![]() ,
,
где произведение линейной нагрузки на плотность тока определяется по [4, стр.173].
2.2.9. Сечение эффективного проводника (предварительно):
qэф = I1H / (a*J1 ) = 32,5 / (3*5,65*106 ) = 1,917*10-6 (м2 ) = 1,917 мм2 .
Берем число элементарных проводников в одном эффективном nЭЛ =1, тогда, руководствуясь [4, стр.172] и [4, стр.470], выбираем обмоточный провод ПЭТВ со следующими данными:
номинальный диаметр неизолированного провода dэл = 1,5 мм
среднее значение диаметра изолированного провода dиз = 1,585 мм
площадь поперечного сечения неизолированного провода qэл = 1,767 мм2
площадь поперечного сечения эффективного проводника qэф = 1,767*1 = 1,767 мм2 .
2.2.10. Принимаем окончательную плотность тока в обмотке:
![]() .
.
2.2.11. Сравним данные расчетного двигателя с данными двигателя-аналога:
|
2.3. Расчет размеров зубцовой зоны статора и воздушного зазора.
Паз статора - по рис.1 с соотношением размеров, обеспечивающим параллельность боковых граней зубцов.
2.3.1. Принимаем предварительно по [4, стр.174] значения индукции в зубцах статора BZ1 и индукции в ярме статора Ba : BZ1 = 1,73 Тл, Ba = 1,45 Тл; тогда ширина зубца
bZ1
=  , где kC
- коэффициент заполнения сердечника сталью.
, где kC
- коэффициент заполнения сердечника сталью.
[4, стр.176] Þ kC = 0,97 (оксидированные листы стали).
![]() СТ1
- длина стали сердечников статора, для машин с δ < 1,5 мм
СТ1
- длина стали сердечников статора, для машин с δ < 1,5 мм ![]() СТ1
»
СТ1
»![]() = 0,186 м.
= 0,186 м.
bZ1
= ![]() мм.
мм.
Высота ярма статора ![]() мм.
мм.
2.3.2. Размеры паза в штампе, согласно [4, стр.178-179], принимаем следующими: ширина шлица паза bш = 3,7 мм;
высота шлица паза hш = 1 мм;
угол наклона граней клиновой части b = 45° .
Высота паза hп
= ![]() ha
=
ha
= ![]() =25,2 мм.
=25,2 мм.
Ширина широкой части паза:
b2
=  =
= ![]() = 7,91 мм.
= 7,91 мм.
Ширина узкой части паза:
b1
=  =
= ![]() = 5,9 мм.
= 5,9 мм.
h1
= hп
- ![]() +
+ ![]() =
= ![]() = 23,1 мм.
= 23,1 мм.
2.3.3. Размеры паза в свету с учётом припусков на сборку: для h = 160 ¸ 250 мм:
DbП
![]() = 0,2 (мм); DhП
= 0,2 (мм); DhП
![]() = 0,2 (мм) [4, стр.177]
= 0,2 (мм) [4, стр.177]
b’2
= b2
- DbП
![]() = 7,91 - 0,2 = 7,71 мм,
= 7,91 - 0,2 = 7,71 мм,
b’1
= b1
- DbП
![]() = 5,9 - 0,2 = 5,7 мм,
= 5,9 - 0,2 = 5,7 мм,
h’1
= h1
- DhП
![]() = 23,1 – 0,2 = 22,9 мм.
= 23,1 – 0,2 = 22,9 мм.
Площадь поперечного сечения паза для размещения проводников:
Sп
=  Sиз
Sиз![]() Sпр
, где
Sпр
, где
Sпр - площадь поперечного сечения прокладок;
Sпр = 0,4b2 + 0,9b1 = 0,4*7,91+0,9*5,9 = 8,47 мм2 .
Sиз = bиз *(2 hа + b1 + b2 ) - площадь поперечного сечения корпусной изоляции в пазу;
bиз - односторонняя толщина изоляции в пазу. [4, стр.61] Þ bиз = 0,4 мм.
Sиз = 0,4*(2*23,8+7,91+5,9) = 24,564 мм2 .
Sп
= ![]() 24,564 - 8,47 = 120,51 мм2
.
24,564 - 8,47 = 120,51 мм2
.
2.3.4. Вычисляем коэффициент заполнения паза:
kЗ = [(dиз )2 *Uп*nэл ] / Sп = (1,5852 *36*1)/ 120,51 = 0,75.
Полученное значение коэффициента заполнения паза входит в рекомендуемые пределы при ручной укладке обмотки [4, стр.66].
2.3.5. Сравним данные расчетного двигателя с данными двигателя-аналога:
|
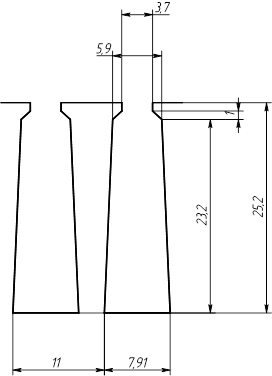
Рис. 1. Паз статора
2.4. Расчет ротора.
2.4.1. Определяем воздушный зазор [4, стр.181] d = 0,5 мм.
2.4.2. Определяем число пазов ротора [4, стр. 185] Z2 = 58.
2.4.3. Внешний диаметр ротора D2
= D![]() 2d = 0,251
2d = 0,251![]() 2*0,0005= 0,15 м.
2*0,0005= 0,15 м.
2.4.4. Длина магнитопровода ротора ![]()
![]() 2
=
2
= ![]() 1
= 0,186 м.
1
= 0,186 м.
2.4.5. Зубцовое деление t2 = (p D2 )/ Z2 = (3,14*0,251)/ 58 = 0,0135 м = 13,5 мм.
2.4.6. Внутренний диаметр ротора равен диаметру вала, так как сердечник непосредственно насажен на вал:
DJ = DВ = kВ Dа = 0,23*0,349 = 0,08 м = 80 мм, где kВ = 0,23 [4, стр.191].
2.4.7. Ток в стержне ротора I2 = ki I1 ni , где ki - коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1 / I2 . ki = 0,925 [4, стр.183];
ni - коэффициент приведения токов,
ni = (2m1 w1 kоб1 ) / Z2 = (2*3*144*0,925) / 58 =13,8.
I2 = 0,925*32,5*13,8 = 414,9 А.
2.4.8. Площадь поперечного сечения стержня:
qс = I2 / J2 , где J2 - плотность тока в стержнях ротора, при заливке пазов алюминием выбирается в пределах J2 = (2¸3,5) А/мм2 [4, стр.186]. Берем J2 = 2,2 А/м м2 , тогда
qс = 414,9 / (2,2*106 ) = 166*10-6 м2 = 188,6 мм2 .
2.4.9. Паз ротора – по рис.2.
Размеры шлица bш = 1,5 мм; hш = 0,7 мм. Высота перемычки над пазом h’ш = 0,3 мм [4, стр.188].
Допустимая ширина зубца:
bZ2
=  =
=  = 6,19 мм, где BZ2
- индукция в зубцах ротора, BZ2
= 1,8 Тл [4, стр.174].
= 6,19 мм, где BZ2
- индукция в зубцах ротора, BZ2
= 1,8 Тл [4, стр.174].
Размеры паза:
b1
= =
=![]() = 6,94 мм.
= 6,94 мм.
b2
=  =
=  = 3,7 мм.
= 3,7 мм.
Согласно рекомендациям [4, стр.189] округляем b1 и b2 до десятых: b1 =7 мм, b2 = 3,7 мм.
h1 = (b1 - b2 )Z2 / (2p) = (7 – 3,7)*58/6,28 = 30,5 мм.
Полная высота паза:
hп 2 = hш + hш +0,5b1 +h1 +0,5b2 = 1+0,7+0,5*7+30,5+0,5*3,7 = 36,9 мм.
Сечение стержня:
qс = (p/8)(b1 + b2 ) + 0,5(b1 + b2 ) h1 = (p/8)(7+3,72 )+0,5(7+3,7)*30,5 = 187,8 мм2 .
2.4.10. Плотность тока в стержне:
J2 = I2 / qс = 414,9 / 187,6*10-6 = 2,21 А/м2 .
2.4.11.Короткозамыкающие кольца. Площадь поперечного сечения:
qкл = Iкл / Jкл , где Jкл - плотность тока в замыкающих кольцах:
Jкл = 0,85J2 = 0,85*2,21= 1,88 А/мм2 .
Iкл
- ток в кольцах, Iкл
= I2
/ D; где D = 2*sin ![]() = 2sin
= 2sin ![]() = 0,324.
= 0,324.
Iкл = 414,9 / 0,324 = 1280 А;
qкл = 1280 / 1,88 = 681,15 мм2 .
2.4.12. Размеры замыкающих колец.
bкл = 1,25hп2 = 1,25*36,9 = 46,1 мм.
aкл = qкл / bкл = 681,15 / 46,1 = 14.8 мм.
qкл = bкл * aкл = 46,1 *14,8 = 682,3 мм2 .
Dк. ср = D2 - bкл = 250 – 46,1 = 203,9 мм.
2.4.13. Сравним данные расчетного двигателя с данными двигателя-аналога:
|
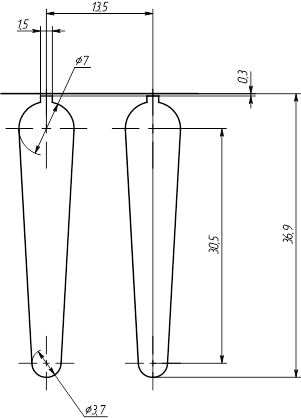
Рис. 2. Паз ротора.
2.5 Расчет магнитной цепи
2.5.1. Значения магнитных индукций:
BZ1
=  =
= ![]() = 1,73 Тл.
= 1,73 Тл.
BZ2
=  =
= ![]() = 1,8 Тл.
= 1,8 Тл.
Ba
= ![]() =
=![]() = 1,45 Тл.
= 1,45 Тл.
Bj
= ![]() , где hj
- расчетная высота ярма ротора,
, где hj
- расчетная высота ярма ротора,
hj
= ![]() hп2
=
hп2
= ![]() = 48,1 мм.
= 48,1 мм.
Bj
= ![]() = 0,72 Тл.
= 0,72 Тл.
2.5.2. Магнитное напряжение воздушного зазора:
![]() Fδ
= 1,59*106
Bδ
kδ
δ, где kδ
- коэффициент воздушного зазора,
Fδ
= 1,59*106
Bδ
kδ
δ, где kδ
- коэффициент воздушного зазора,
kδ
= t1
/(t1
-gδ ), где g = ![]() =
= ![]() = 4,42.
= 4,42.
kδ
= ![]() = 1,25.
= 1,25.
Fδ = 1,59*106 *0,8*1,25*0,5*10-3 = 795 А.
2.5.3.Магнитные напряжения зубцовых зон:
статора![]() : Fz
1
= 2hz
1
Hz
1
: Fz
1
= 2hz
1
Hz
1
ротора: Fz 2 = 2hz 2 Hz 2
hz 1 - расчетная высота зубца статора, hz 1 = hп1 = 25,2 мм.
hz 2 - расчетная высота зубца ротора, hz 2 = hп2 - 0,1b2 = 36,9 - 0,1*3.7 = 36,5 мм.
Hz 1 - значение напряженности поля в зубцах статора;
при BZ1 = 1,73 Тл для стали 2013 HZ1 = 1250 А/м [4, стр. 461].
Hz 2 - значение напряженности поля в зубцах ротора;
при BZ21 = 1,8 Тл для стали 2013 HZ2 = 1520 А/м [4, стр. 461].
Fz 1 = 2*0,0252*1250 = 63 А,
Fz 2 = 2*0,0365*1520 = 111 А.
2.5.4. Коэффициент насыщения зубцовой зоны:
kz
= 1+ = 1+
= 1+![]() = 1,22. Коэффициент насыщения зубцовой зоны входит в рекомендуемые пределы ( 1.2 < kz
< 1.5).
= 1,22. Коэффициент насыщения зубцовой зоны входит в рекомендуемые пределы ( 1.2 < kz
< 1.5).
2.5.5. Магнитные напряжения ярм статора и ротора:
Fa = La Ha ,
Fj = Lj Hj ,
La - длина средней магнитной линии ярма статора,
La
= ![]() =
= ![]() = 0,1703 м.
= 0,1703 м.
Lj - длина средней магнитной линии потока в ярме ротора,
Lj
= ![]() , где hj
- высота спинки ротора,
, где hj
- высота спинки ротора,
hj
= ![]() - hп2
=
- hп2
= ![]() - 36,9 = 48,1 мм.
- 36,9 = 48,1 мм.
Lj
= ![]() =67,1 мм.
=67,1 мм.
Ha и Hj - напряженности поля; Ba = 1,45 Тл Þ Ha = 450 А/м. [4, стр.460].
Bj = 0,72 Тл Þ Hj = 104 А/м. [4, стр.460].
Fа = 0,1703*450 = 76,67 А.
Fj = 0,067*104 = 7 А.
2.5.6. Магнитное напряжение на пару полюсов:
Fц = Fδ + Fz1 + Fz2 + Fa + Fj = 795 + 63 + 111 + 76.64 + 7= 1052.6 A.
2.5.7. Коэффициент насыщения магнитной цепи:
km = Fц / Fδ = 1052,6/795 = 1,3.
2.5.8. Намагничивающий ток:
Im
= ![]() =
= ![]() = 8,78 А.
= 8,78 А.
Относительное значение: Im * = Im / I1н = 8,78 / 32,5 = 0,27.
2.6 Расчет параметров рабочего режима
2.6.1. Активное сопротивление фазы обмотки статора:
r1
= r115
*![]() , где r115
- удельное сопротивление материала обмотки при расчетной температуре, Ом*м. Для класса нагревостойкости изоляции F расчетная температура равна 115 градусам. Для меди r115
= 10-6
/41 Ом*м. [4, стр.245].
, где r115
- удельное сопротивление материала обмотки при расчетной температуре, Ом*м. Для класса нагревостойкости изоляции F расчетная температура равна 115 градусам. Для меди r115
= 10-6
/41 Ом*м. [4, стр.245].
L1
- общая длина эффективных проводников фазы обмотки статора, L1
= ![]() ср1
w1,
где
ср1
w1,
где
![]() ср1
- средняя длина витка обмотки статора,
ср1
- средняя длина витка обмотки статора, ![]() ср1
= 2 (
ср1
= 2 (![]() п1
+
п1
+![]() π1
);
π1
);
![]() п1
- длина пазовой части,
п1
- длина пазовой части, ![]() п1
=
п1
= ![]() 1
= 0,186 м.
1
= 0,186 м.
![]() π1
- лобовая часть катушки,
π1
- лобовая часть катушки, ![]() л1
= Kл
*bкт
+2В, где Kл
=1,4 [4, стр.197].
л1
= Kл
*bкт
+2В, где Kл
=1,4 [4, стр.197].
В - длина вылета прямолинейной части катушки из паза от торца сердечника до начала отгиба лобовой части. Принимаем В = 0,01 [4, стр.197].
bкт
- средняя ширина катушки, bкт
= ![]() b1,
где b1
- относительное укорочение шага обмотки статора, b1
= 0,833 (п.2.2.7 ).
b1,
где b1
- относительное укорочение шага обмотки статора, b1
= 0,833 (п.2.2.7 ).
bкт
= ![]() = 0,121 м.
= 0,121 м.
![]() л1
= 1,4*0,121 + 2*0,01 = 0,189 м,
л1
= 1,4*0,121 + 2*0,01 = 0,189 м,
![]() ср1
= 2*(0,186 + 0,189) = 0,75 м.
ср1
= 2*(0,186 + 0,189) = 0,75 м.
Длина вылета лобовой части катушки:
![]() выл
= Kвыл
*bкт
+ В = 0,5*0,145 + 0,02= 0,0825 м = 82,5 мм.
выл
= Kвыл
*bкт
+ В = 0,5*0,145 + 0,02= 0,0825 м = 82,5 мм.
Kвыл = 0,5 [4, стр.197].
L1 = 0,75*144 = 108 м.
r1
= ![]() = 0,498 Ом.
= 0,498 Ом.
Относительное значение: r1
*
= r1
![]() = 0,498*
= 0,498*![]() = 0,043.
= 0,043.
2.6.2. Активное сопротивление фазы обмотки ротора:
r2
= rс
+![]() , где rс
- сопротивление стержня: rс
= r115
*
, где rс
- сопротивление стержня: rс
= r115
*![]() ;
;
для литой алюминиевой обмотки ротора r115 = 10-6 / 20,5 Ом*м. [4, стр.245].
rс
= ![]() = 48,2*10-6
Ом.
= 48,2*10-6
Ом.
rкл
- сопротивление участка замыкающего кольца, заключенного между двумя соседними стержнями: rкл
= r115
*![]() =
= ![]() = 0,789*10-6
Ом.
= 0,789*10-6
Ом.
r2
= 48,2*10-6
+![]() = 63*10-6
Ом.
= 63*10-6
Ом.
Приводим r2 к числу витков обмотки статора:
r2
= r2
*![]() = 68,52*10-6
*
= 68,52*10-6
*![]() = 0,23 Ом.
= 0,23 Ом.
Относительное значение: r2
*
= r2
*![]() = 0,23*
= 0,23*![]() = 0,02.
= 0,02.
2.6.3. Индуктивное сопротивление фазы обмотки статора:
х1
= 15,8* *(lп1
+lл1
+lд1
), где
*(lп1
+lл1
+lд1
), где
lп1 - коэффициент магнитной проводимости пазового рассеяния:
lп1
=  , где
, где
h3 = (b1 - bш1 )/2 = (5,9 – 3,7)/2 =1,1 мм.
h1 = 23,1 мм (п. 2.3.2).
Так как проводники закреплены пазовой крышкой, то h2 = 0.
k’b = 0,25(1 + 3β) = 0,25(1 + 3*0,833) = 0,88.
kb = 0,25(1 + 3 k’b ) = 0,25(1 + 3*0,88) = 0,91.
lп1
= ![]() = 1,643.
= 1,643.
lл1 - коэффициент магнитной проводимости лобового рассеяния:
lл1
= 0,34*![]() *(
*(![]() л
- 0,64*b*t) = 0,34*
л
- 0,64*b*t) = 0,34*![]() *(0,223 - 0,64*0,833*0,131)= 1,12.
*(0,223 - 0,64*0,833*0,131)= 1,12.
lд1 - коэффициент магнитной проводимости дифференциального рассеяния:
lд1
=  *x, где x = 2*kск
*kb
- kоб1
2
*x, где x = 2*kск
*kb
- kоб1
2
![]() *(1+bск
2
);
*(1+bск
2
);
Так как отсутствует скос пазов, то bск = 0.
kск определяем в зависимости от t2 /t1 и bск :
![]() =
= ![]() = 1,23 ; bск
= 0 Þ kск
= 1,2 [4, стр. 201].
= 1,23 ; bск
= 0 Þ kск
= 1,2 [4, стр. 201].
x = 2*1,2*1 - 0,9252 *1,232 = 1,1.
lд1
= ![]() = 1,63.
= 1,63.
х1
= 15,8*![]() *(1,643 + 1,12 + 1,63 ) = 1,12 Ом.
*(1,643 + 1,12 + 1,63 ) = 1,12 Ом.
Относительное значение: х1
*
= х1
![]() = 1,12*
= 1,12*![]() = 0,096.
= 0,096.
2.6.4. Индуктивное сопротивление фазы обмотки ротора:
х2
= 7,9*![]() 1
*
1
*![]() *(lп2
+ lл2
+ lд2
)*10-6
*(lп2
+ lл2
+ lд2
)*10-6
lп2
=  kд
+
kд
+![]() , где
, где
h0 = hп2 – hш2 – hш2 = 36,9 – 0,7 – 0,3 = 35,9 мм.
Для рабочего режима kд = 1.
b1 =7 мм, bш = 1,5 мм; hш = 0,7 мм; hш = 1 мм (п. 2.4.9).
lп2
=  = 3,1.
= 3,1.
lл2
=  =
= ![]() = 0,44.
= 0,44.
lд2
=  *x, где x »1 [4, стр.246].
*x, где x »1 [4, стр.246].
lД2
= ![]() = 1,8.
= 1,8.
Σl = lп2 + lл2 + lд2 = 3,1 + 0,4 + 1,8 = 5,34.
х2 = 7,9*50*0,186*5,34*10-6 = 389*10-6 Ом.
Приводим х2 к числу витков статора:
х2
= х2
*![]() =
= ![]() = 1,4 Ом.
= 1,4 Ом.
![]() Относительное значение: х2
*
= х2
Относительное значение: х2
*
= х2
![]() = 1,4*
= 1,4*![]() = 0,12.
= 0,12.
2.6.5. Сравним данные расчетного двигателя с данными двигателя-аналога:
|
Расхождение значений индуктивного сопротивления обмотки статора (20%) проектируемого двигателя с справочным связано в первую очередь с тем, что в расчетном двигателе число эффективных проводников в пазу меньше, чем в аналоге (так как в расчетном двигателе меньше линейная токовая нагрузка), Þ меньше число витков в фазе обмотки статора, что напрямую влияет на значение индуктивного сопротивления. Также в проектируемом двигателе несколько меньшими оказались размеры паза статора (его высота и ширина большей и меньшей частей), что повлияло на уменьшение величины коэффициента магнитной проводимости пазового рассеяния, от которого пропорционально зависит индуктивное сопротивление статора.
2.7. Расчет потерь
2.7.1. Потери в стали основные:
Pст.осн.
= р1,0/50  (kда
Ba
2
ma
+ kд
z
Bz
1
2
mz
1
), где
(kда
Ba
2
ma
+ kд
z
Bz
1
2
mz
1
), где
р1,0/50 - удельные потери при индукции 1 Тл и частоте перемагничивания 50 Гц.
р1,0/50 = 2,5 Вт/кг. [4. стр.206].
β – показатель степени, β = 1,5 [4. стр.206].
kда и kд z - коэффициенты, учитывающие влияние на потери в стали неравномерности распределения потока по сечениям участков магнитопровода и технологических факторов. kда = 1,6; kд z = 1,8 [4. стр.206].
ma - масса стали ярма статора,
ma
= p(Da
- ha
)ha
![]() kс
1
gс
=3,14*(0,349 - 0,0238)*0,0238*0,186*0,97*7,8*103
= 34,22 кг,
kс
1
gс
=3,14*(0,349 - 0,0238)*0,0238*0,186*0,97*7,8*103
= 34,22 кг,
где ha = 23,8 мм (п.2.3.1);
gс - удельная масса стали; gС = 7,8*103 кг/м3 [4. стр.206].
mz 1 - масса стали зубцов статора,
mz
1
= hz
1
bz
1ср.
Z1
![]() ст
kс1
gс
= 25,2*10-3
*5,24*10-3
*72*0,186*0,97*7,8*103
= 13,38 кг,
ст
kс1
gс
= 25,2*10-3
*5,24*10-3
*72*0,186*0,97*7,8*103
= 13,38 кг,
где hz 1 =25,2 мм, bz 1ср = 5,24 мм. (п.2.3.1 и п.2.3.2).
Pст. осн. = 2,6*1*(1,6*1,452 *34,22+1,8*1,732 *13,38) = 486,72 Вт.
2.7.2. Поверхностные потери в роторе.
Pпов2
= pпов2
(t2
- bш2
)Z2
![]() ст2,
где
ст2,
где
pпов2 - удельные поверхностные потери в роторе:
pпов2
= 0,5k02
 (B02
*t1
*103
)2
;
(B02
*t1
*103
)2
;
B02 - амплитуда пульсации индукции в воздушном зазоре над коронками зубцов ротора:
B02
= b02
![]() ,
,
b02 зависит от соотношения ширины шлица пазов статора к воздушному зазору:
bш1 /d = 3,7/0,5 = 7,4 Þ b02 = 0,36 [4. стр.206].
k02 - коэффициент, учитывающий влияние обработки поверхности головок зубцов ротора на удельные потери: k02 =1,5 [4. стр.206].
B02 = 0,36*1,25*0,8 = 0,36 Тл.
pпов2
= 0,5*1,5*![]() *(0,36*11)2
= 568 *(16,8 - 1,5)*24 *0,091 = 227,2 Вт.
*(0,36*11)2
= 568 *(16,8 - 1,5)*24 *0,091 = 227,2 Вт.
Pпов2 = 227,2*(13,5 – 1,5)* 10-3 *58*0,186 = 29,4 Вт.
2.7.3. Пульсационные потери в зубцах ротора.
Pпул2
= 0,11![]() mz
2,
где (115)
mz
2,
где (115)
Bпул2 - амплитуда пульсаций индукции в среднем сечении зубцов :
Bпул2
= ![]() Bz
2
=
Bz
2
= ![]() = 0.147 Тл.
= 0.147 Тл.
mz 2 - масса стали зубцов ротора,
mz
2
= Z2
hz
2
bz
2
![]() ст2
kс2
gс
=58*34,10*10-3
*6,16*10-3
*0,186*0,97*7,8*103
= 17,52 кг.
ст2
kс2
gс
=58*34,10*10-3
*6,16*10-3
*0,186*0,97*7,8*103
= 17,52 кг.
Pпул2
= 0,11*![]() = 211 Вт.
= 211 Вт.
2.7.4. Сумма добавочных потерь в стали.
Pст.доб. = Pпов1 + Pпул1 + Pпов2 + Pпул2 = 29,4 + 211 = 240,4 Вт.
2.7.5. Полные потери в стали.
Pст. = Pст. осн. + Pст. доб. = 486,72 + 240,4 = 727,12 Вт.
2.7.6. Добавочные потери при номинальном режиме.
Pдоб.н = 0,005 P1н = 0,005 P2н /η = 0,005*30000/0,91 = 164,8 Вт.
2.7.7. Механические потери.
Pмех
= Kт
![]() Da
4
Da
4
Kт
= 1,3(1 - Da
) [4, стр.208] Þ Pмех
= 1,3(1 – 0,349)![]() 0,3494
= 125,6 Вт.
0,3494
= 125,6 Вт.
2.7.8. Холостой ход двигателя.
Iх.х.
= ![]() , где
, где
Iх.х.а.
= ![]() ;
;
Pэ1 х.х. = mIm 2 r1 = 3*8,782 *0,498 = 115,2 Вт.
Iх.х.а.
= ![]() = 0,849 А.
= 0,849 А.
Iх.х.
= ![]() = 8,82 А.
= 8,82 А.
cos jхх = Iх.х. a / Iх.х. = 0,858 / 8,82 = 0,1.
2.8 Расчет рабочих характеристик
Активное сопротивление намагничивающего контура:
r12 = Pст. осн. /(m*Im 2 ) = 486,72 / (3*8,782 ) = 2,11 Ом.
Индуктивное сопротивление намагничивающего контура:
x12 = U1н /Im - x1 = 380/8,78 – 1,12 = 42,16 Ом.
c1 = 1+x1 /x12 = 1+1,12/42,16 = 1,027 Ом.
g = ![]() =
= ![]() =
=
= arctg 0,0067 = 0,628 o = 23¢ < 1o
Активная составляющая тока холостого хода :
I0a
= (Pст
.
осн
.
+3*Im
2
*r1
) / (3*U1
н
) = ![]() = 0,535 A.
= 0,535 A.
a’ = c1 2 = 1,0272 = 1,055
b’ = 0
a = c1 r1 = 1,027*0,542 = 0,511 Ом
b = c1 (x1 +c1 x’ 2 ) = 1,027(1,12+1,027*1,4) = 2,627 Ом.
Потери, не изменяющиеся при изменении скольжения :
Pст. + Pмех. = 727,12+125,6 = 852,17 Вт.
Таблица 1. Рабочие характеристики асинхронного двигателя.
| Параметр |
Ед-ца |
Скольжение |
||||||
| 0,005 |
0,01 |
0,015 |
sн =0,019 |
0,02 |
0,025 |
0,03 |
||
| a’×r’2 /s |
Ом |
48,53 |
24,27 |
16,18 |
12,77 |
12,13 |
9,71 |
8,09 |
| b’×r’2 /s |
Ом |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
| R = a + a¢ *r¢ 2 /s |
Ом |
49,04 |
24,78 |
16,69 |
13,28 |
12,64 |
10,55 |
8,99 |
| X = b + b¢ *r¢ 2 /s |
Ом |
2,627 |
2,627 |
2,627 |
2,627 |
2,627 |
2,627 |
2,627 |
| Z = (R2 +X2 )0,5 |
Ом |
49,11 |
24,92 |
16,9 |
13,54 |
12,91 |
10,55 |
8,99 |
| I¢¢ 2 = U1 /Z |
А |
7,74 |
15,25 |
22,49 |
28,06 |
29,43 |
36,02 |
42,27 |
| cos j¢ 2 = R/Z |
- |
0,999 |
0,994 |
0,988 |
0,981 |
0,979 |
0,969 |
0,957 |
| sin j¢ 2 = X/Z |
- |
0,053 |
0,103 |
0,155 |
0,19 |
0,2 |
0,249 |
0,292 |
| I1a =I0a +I¢¢ 2 cosj¢ 2 |
А |
8,26 |
15,69 |
22,75 |
28,05 |
29,36 |
35,43 |
40,98 |
| I1p = I0p +I¢¢ 2 sin j¢ 2 |
А |
9,19 |
10,38 |
12,27 |
14,2 |
14,75 |
17,75 |
21,12 |
| I1 = (I1a 2 +I1p 2 )0,5 |
А |
12,36 |
18,83 |
25,85 |
31,45 |
32,84 |
39,63 |
46,1 |
| I¢ 2 = c1 I¢¢ 2 |
А |
7,95 |
15,68 |
23,1 |
28,82 |
30,55 |
36,99 |
43,41 |
| P1 = 3U1 I1a 10-3 |
кВт |
9,43 |
17,93 |
25,92 |
31,98 |
33,47 |
40,39 |
46,72 |
| Pэ1 = 3I1 2 r1 10-3 |
кВт |
0,23 |
0,53 |
1 |
1,48 |
1,61 |
2,35 |
3,18 |
| Pэ 2 = 3I¢ 2 2 r’ 2 10-3 |
кВт |
0,04 |
0,17 |
0,37 |
0,57 |
0,63 |
0,94 |
1,3 |
| Pдоб = 0,005*P1 |
кВт |
0,02 |
0,06 |
0,083 |
0,153 |
0,167 |
0,231 |
0,327 |
| åP=Pст +Рмех +Pэ 1 + Рэ 2 +Рдоб |
кВт |
1,14 |
1,61 |
2,31 |
3,1 |
3,26 |
4,3 |
5,66 |
| Р2 = Р1 - åP |
кВт |
8,28 |
16,28 |
23,62 |
28,88 |
30,19 |
36,01 |
41,06 |
| h = 1 - åP/P1 |
- |
0,879 |
0,91 |
0,911 |
0,903 |
0,903 |
0,892 |
0,879 |
| cos j = I1a /I1 |
- |
0,668 |
0,834 |
0,88 |
0,892 |
0,893 |
0,894 |
0,889 |
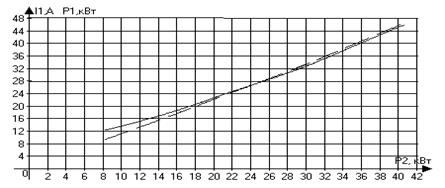
________ - I1 = f (P2 )
__ __ __ - P1 = f (P2 )
Рис.3. Зависимости тока статора и потребляемой мощности от мощности на валу.
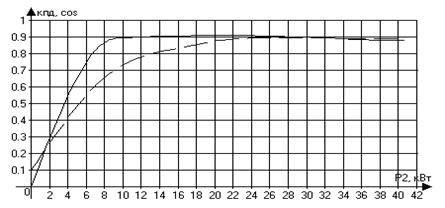
________ - η = f (P2 )
__ __ __ - cosφ = f (P2 )
Рис.4. Зависимости кпд и коэффициента мощности от мощности на валу.
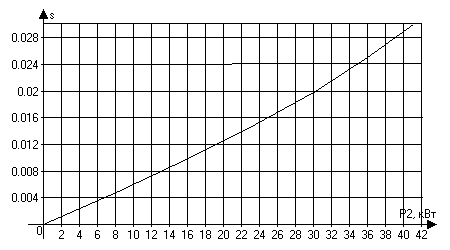
Рис.5. Зависимость скольжения от мощности на валу.
Как видно из таблицы 1, а также рис. 3, 4 и 5 номинальному режиму работы асинхронного двигателя (P2н = 30 кВт) соответствуют: sн = 0,0197; P1н = 33,4 кВт; I1н = 32,5 А; I2н = 30,1 А; ηн = 0,9; cosφн = 0,895.
Сравним данные расчетного двигателя с данными двигателя-аналога:
|
2.9 Расчет пусковых характеристик
2.9.1. Расчет токов с учётом изменения параметров под влиянием эффекта вытеснения тока (без учёта влияния насыщения от полей рассеяния).
Подробный расчёт приведён для S = 1. Данные расчёта остальных точек сведены в табл. 2.
x = 63,61hс![]() = 63,61*0,0359= 2,28, где
= 63,61*0,0359= 2,28, где
hс = hп - (hш + h¢ ш ) = 36,9 - (0,7 + 0,3) = 35,9 мм.
x - ”приведённая высота” стержня,
x = 2,28 Þ j = 1,15 [4, стр.216].
Глубина проникновения тока в стержень: hr
= ![]() =
= ![]() = 0,0167 м. = 16,7 мм.
= 0,0167 м. = 16,7 мм.
Площадь сечения, ограниченного высотой hr
: qr
= ![]() .
.
br
= ![]() = 5,11 мм.
= 5,11 мм.
qr
= ![]() = 99,17 мм2
.
= 99,17 мм2
.
kr = qс /qr = 187,8 / 99,17 = 1,89
KR
= ![]() = 1,68,
= 1,68,
Приведённое активное сопротивление обмотки ротора с учётом влияния эффекта вытеснения тока : r’2 x = KR * r’2 = 1,68*0,23 = 0,39 Ом.
Рассчитаем индуктивное сопротивление обмотки ротора с учётом влияния эффекта
вытеснения тока.
x = 2,28 Þ j¢ = kд = 0,64 [4, стр.217].
Kx = (lп2 x +lл2 +lд2 )/( lп2 +lл2 +lд2 )
lп2 x = lп2 - Dlп2 x
Dlп2
x
= l’п2
(1- kд
) =  (1 - kд
) =
(1 - kд
) =
= = 0,655.
= 0,655.
lп2 x = 3,1 – 0,655 = 2,44.
Kх
= ![]() = 0,8.
= 0,8.
Индуктивное сопротивление: х’2 x = Kх *x’2 = 0,88*1,4 = 1,23 Ом.
Индуктивное сопротивление взаимной индукции:
х12п = km * x12 = 1,33*42,16 = 56,07 Ом.
с1п = 1 + х1 /х12п = 1 + 1,12/56,07 = 1,02.
Rп = r1 +c1п *r’2 x /s = 0,498 + 1,02*0,39 = 0,896 Ом.
Xп = х1 + с1п *х’2 x = 1,12 + 1,02*1,23 = 2,37 Ом.
I¢ 2 = U1 / (Rп 2 +Хп 2 )0,5 = 380/(0,8962 +2,372 )0,5 = 149,98 A.
I1
= I¢
2
 =
=  = 152,3 A.
= 152,3 A.
Таблица 2. Расчёт токов в пусковом режиме асинхронного двигателя с короткозамкнутым ротором с учётом влияния эффекта вытеснения тока.
| № п/п |
Параметр |
Ед-ца |
Скольжение |
|||||
| 1 |
0,8 |
0,5 |
0,2 |
0,1 |
sкр =0,117 |
|||
| 1 |
x = 63,61hс S0,5 |
- |
2,28 |
2,04 |
1,61 |
1,02 |
0,7 |
0,78 |
| 2 |
j( x ) |
- |
1,15 |
0,9 |
0,4 |
0,1 |
0,02 |
0,02 |
| 3 |
hr = hс /(1+j) |
мм |
16,7 |
18,9 |
25,6 |
32,6 |
35,2 |
35,2 |
| 4 |
kr = qс /qr |
- |
1,89 |
1,71 |
1,35 |
1,16 |
1,11 |
1,11 |
| 5 |
KR =1+(rс /r2 )(kr - 1) |
- |
1,68 |
1,54 |
1,27 |
1,12 |
1,08 |
1,08 |
| 6 |
r’2 x =KR *r’2 |
Ом |
0,39 |
0,35 |
0,29 |
0,26 |
0,248 |
0,248 |
| 7 |
kд = j¢ (x) |
- |
0,63 |
0,75 |
0,88 |
0,96 |
1 |
0,98 |
| 8 |
lп 2 x = lп 2 - Dlп 2 x |
- |
2,44 |
2,66 |
2,9 |
3,05 |
3,1 |
3,05 |
| 9 |
Kх = ål2 x / ål2 |
- |
0,88 |
0,91 |
0,963 |
0,99 |
1 |
0,99 |
| 10 |
x’ 2 x = Kx *x’2 |
Ом |
1,23 |
1,27 |
1,348 |
1,386 |
1,4 |
1,386 |
| 11 |
Rп = r1 +c1 п *r’ 2 x /s |
Ом |
0,94 |
0,946 |
1,094 |
1,83 |
3,28 |
2,66 |
| 12 |
Xп = x1 +c1 п *x’2 x |
Ом |
2,37 |
2,42 |
2,504 |
2,53 |
2,56 |
2,53 |
| 13 |
I¢ 2 = U1 / (Rп 2 +Xп 2 )0,5 |
А |
149,04 |
145,3 |
138,2 |
120,8 |
91,3 |
103,5 |
| 14 |
I1 = I¢ 2 (Rп 2 ++(Xп +x12 п )2 )0,5 /(c1 п *x12 п ) |
А |
152,3 |
148,6 |
141,6 |
123,8 |
93,74 |
106,1 |
2.9.2. Расчет токов с учётом изменения параметров под влиянием эффекта вытеснения тока и насыщения от полей рассеяния.
Расчёт проводим для точек характеристик, соответствующих S=1; 0,8; 0,5; 0,2; 0,093, при этом используем значения токов и сопротивлений для тех же скольжений с учётом влияния вытеснения тока. Данные расчёта сведены в табл. 3. Подробный расчёт приведён для S=1.
Принимаем kнас = 1,4, тогда
средняя мдс обмотки, отнесённая к одному пазу обмотки статора:
Fп.ср.
=  =
= ![]() =
=
= 3582,1 А.
CN
=  = 0,997.
= 0,997.
Фиктивная индукция потока рассеяния в воздушном зазоре :
BФ d = (Fп. ср. /(1,6*d*СN ))*10-6 = (3582,1*10-6 )/(1,6*0,5*10-3 *0,997) = 4,5 Тл.
BФ d = 4,5 Тл Þ кd = 0,52. [4, стр.219].
Коэффициент магнитной проводимости пазового рассеяния обмотки статора с учётом влияния насыщения: с1 = (t1 - bш1 )(1 - кd ) = (11 – 3,7)(1 - 0,52) = 3,5.
Dlп1 нас. =((hш1 +0,58hк )/bш1 )(с1 /(с1 +1,5bш1 )), где
hк = hп - h1 = 25,2 – 23,1 = 2,1 мм.
Dlп1 нас.
= ![]() .
.
lп1 нас. = lп1 - Dlп1 нас. = 1,643 - 0,232 = 1,411.
Коэффициент магнитной проводимости дифференциального рассеяния обмотки статора с учётом влияния насыщения: lд1 нас. = lд1 *кd = 1,63*0,52 = 0,85.
Индуктивное сопротивление фазы обмотки статора с учётом влияния насыщения:
х1 нас.
= (х1
*ål1 нас.
)/ ål1
= ![]() = 0,88 Ом.
= 0,88 Ом.
Коэффициент магнитной проводимости пазового рассеяния обмотки ротора с учётом влияния насыщения и вытеснения тока :
Dlп2. нас. = (hш2 /bш2 )/(c2 /(с2 +bш2 )), где
с2 = (t2 - bш2 )(1 - кd ) = (13,5 - 1,5)(1 - 0,52) =6,24
Dlп2. нас.
= ![]() .
.
lп2 x . нас. = lп2 x - Dlп2. нас. = 2,44 - 0,376 = 2,064.
Коэффициент магнитной проводимости дифференциального рассеяния ротора с учётом влияния насыщения: lд2. нас. = lд2 *кd = 1,8*0,52 = 0,936.
Приведённое индуктивное сопротивление фазы обмотки ротора с учётом влияния эффекта вытеснения тока и насыщения:
х’2
x
нас
= (х’2
*ål2
x
нас.
)/ ål2
= ![]() = 0,902 Ом.
= 0,902 Ом.
с1п. нас. = 1 + х1 нас. /х12 п = 1+(0,88/56,07) = 1,016.
Проведем расчет токов и моментов.
Rп нас. = r1 + c1п. нас. *r’2 x /s = 0,498+1,016*0,39 = 0,894 Ом.
Xп.нас. =х1нас + с1п.нас. *х’ 2 x нас. = 0,88 + 1,016*0,902 = 1,8 Ом.
I’2нас. =U1 /(Rп.нас 2 +Хп.нас 2 )0,5 = 380/(0,8942 +1,82 )0,5 = 189,07 A.
I1нас
= I¢
2нас
 =
=  = 192,1 A.
= 192,1 A.
Относительное значение: Iп
*
= ![]() = 5,91.
= 5,91.
Mп
*
=  =
=  = 1,29.
= 1,29.
к’ нас . = I1 нас . /I1 = 192,1/152,3 = 1,26.
k’нас. отличается от принятого kнас. = 1,4 не более чем на 10%, что допустимо [4, стр.223].
Таблица 3. Расчёт пусковых характеристик асинхронного двигателя с короткозамкнутым ротором с учётом эффекта вытеснения тока и насыщения от полей рассеяния.
| № п/п |
Параметр |
Ед-ца |
Скольжение |
|||||
| 1 |
0,8 |
0,5 |
0,2 |
0,1 |
sкр =0,117 |
|||
| 1 |
kнас |
- |
1,4 |
1,35 |
1,31 |
1,22 |
1,15 |
1,16 |
| 2 |
Fп. ср. |
А |
3582,1 |
3391 |
3136 |
2560 |
1911 |
2068 |
| 3 |
BФ d =(Fп.ср. *10-6 ) / (1,6*d*CN ) |
Тл |
1,66 |
4,25 |
3,93 |
3,21 |
2,4 |
2,6 |
| 4 |
кd = ¦( BФ d ) |
- |
0,52 |
0,55 |
0,59 |
0,68 |
0,8 |
0,77 |
| 5 |
с1 = (t1 - bш1 )(1 - кd ) |
- |
3,5 |
3,285 |
2,993 |
2,34 |
1,46 |
1,679 |
| 6 |
lп1 нас. = lп1 - Dlп1 нас. |
- |
0,232 |
0,223 |
0,21 |
0,18 |
0,125 |
0,139 |
| 7 |
lд1 нас. = кd *lд1 |
- |
0,85 |
0,9 |
0,96 |
1,11 |
1,304 |
1,26 |
| 8 |
х1 нас. = х1 *ål1 нас. / ål1 |
Ом |
0,88 |
0,895 |
0,914 |
0,961 |
1,026 |
1,011 |
| 9 |
c1п. нас. = 1+х1 нас. / х12п |
- |
1,016 |
1,016 |
1,016 |
1,017 |
1,018 |
1,018 |
| 10 |
с2 = (t2 - bш2 )(1 - кd ) |
- |
6,24 |
5,4 |
4,92 |
3,84 |
2,4 |
2,76 |
| 11 |
lп2 x нас. = lп2 x - Dlп2 нас. |
- |
2,064 |
2,3 |
2,542 |
2,71 |
2,813 |
2,75 |
| 12 |
lд2 нас. = кd *lд2 |
- |
0,936 |
0,99 |
1,062 |
1,224 |
1,44 |
1,386 |
| 13 |
х¢ 2 x нас. = х¢ 2 *ål2 x нас. /ål2 |
Ом |
0,902 |
0,978 |
1,06 |
1,147 |
1,23 |
1,19 |
| 14 |
Rп. нас. = r1 +c1п. нас. *r¢ 2 x /s |
Ом |
0,894 |
1,087 |
1,82 |
3,02 |
2,66 |
2,66 |
| 15 |
Xп.нас =х1нас. +с1п.нас. *х¢ 2 x нас |
Ом |
1,8 |
1,89 |
1,99 |
2,13 |
2,28 |
2,22 |
| 16 |
I¢ 2нас =U1 /(Rп.нас 2 +Хп.нас 2 )0,5 |
А |
189,07 |
179,9 |
167,6 |
135,6 |
100,4 |
109,7 |
| 17 |
I1 нас =I¢ 2 нас * (Rп.нас 2 + (Хп. нас + х12п ) 2 ) 0,5 /( c1п. нас *х12п ) |
А |
192,1 |
183,1 |
170,8 |
138,5 |
102,8 |
112,1 |
| 18 |
k’ нас . = I1 нас . /I1 |
- |
1,26 |
1,23 |
1,2 |
1,11 |
1,05 |
1,06 |
| 19 |
I1 * = I1 нас . /I1 ном |
- |
5,91 |
5,63 |
5,26 |
4,26 |
3,16 |
3,45 |
| 20 |
М * = (I’ 2нас /I’ 2ном )2 КR (sном /s) |
- |
1,29 |
1,34 |
1,54 |
2,22 |
2,34 |
2,39 |
Критическое скольжение определяем после расчёта всех точек пусковых характеристик (табл. 3) по средним значениям сопротивлений, соответствующим скольжениям
s = 0,2 ¸ 0,1 : sкр = r¢ 2 x / (x1 нас. /c1п нас. +x¢ 2 x нас. ) = 0,25(0,99/1,0175+1,19)=0,117; Mmax * = 2,39.
Кратности пускового и максимального моментов и пускового тока спроектированного двигателя удовлетворяют требованиям ГОСТ и технического задания на курсовой проект.
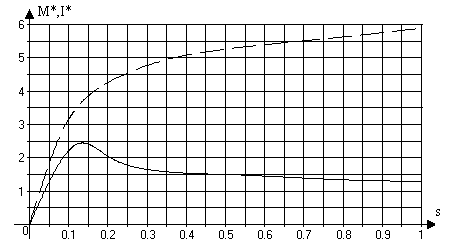
________ - M* = f (s)
__ __ __ - I* = f (s)
Рис.6. Пусковые характеристики асинхронного двигателя.
Сравним данные расчетного двигателя с данными двигателя-аналога:
|
3. Моделирование двигателя в среде MatLab Power System Blockset
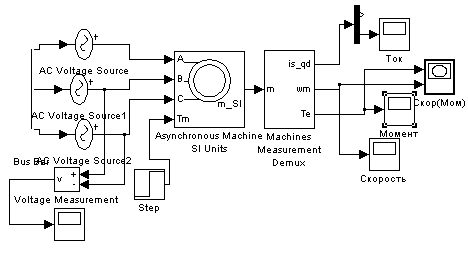
Рис.7. Схема пуска асинхронного двигателя с короткозамкнутым ротором в MatLab Power System Blockset.
3.1 Моделирование с параметрами номинального режима
При моделировании с параметрами номинального режима в качестве сопротивлений асинхронного двигателя выставляем сопротивления, рассчитанные в п.2.6 и п.2.8:
| r1 |
r2 ’ |
x1 |
x2 ’ |
x12 |
| 0,498 |
0,23 |
1,12 |
1,4 |
42,16 |
Вместо x1 подставляем L1 = x1 /314 = 1.12/314 = 3.57 мГн.
Вместо x2 ’ - L2 ’ = x2 /314 = 1,4/314 = 4,46 мГн.
Вместо x12 - L12 = x12 /314 = 42.16/314 = 134.3 мГн.
При моделировании получены следующие результаты:
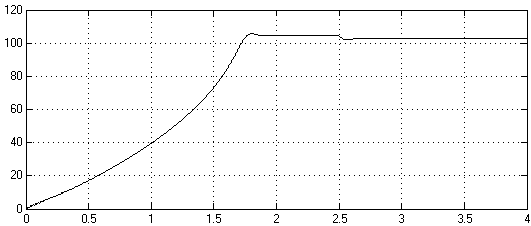
Рис.8. Зависимость угловой скорости от времени.
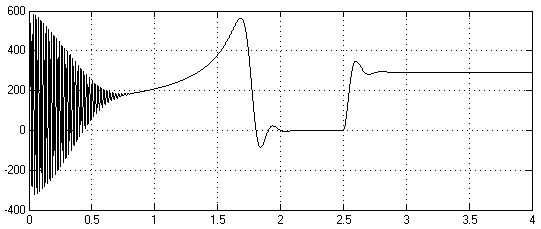
Рис.9. Зависимость момента от времени.
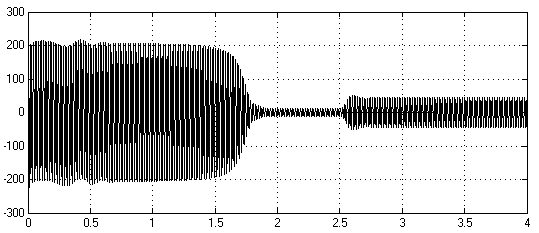
Рис.10. Зависимость тока статора от времени.
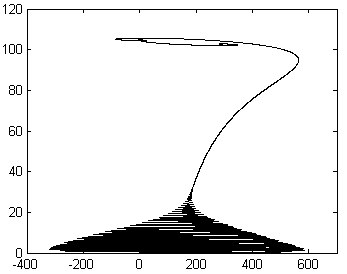
Рис.11. Механическая характеристика асинхронного двигателя.
Сравним при помощи рис.8 номинальное скольжение, полученное при моделировании, с расчетным.
sном . мод = (ωо - ωном )/ ωо = (104,72 – 102,7)/104,72 = 0,0193.
sном.расч = 0,0197.
Относительная погрешность: δs = (sном.расч - sном.мод )/ sном.расч = (0,0197 – 0,0193)/0,0197 =
= 0,02. δs = 2%.
По рис.9 найдем ток статора при холостом ходе и в номинальном режиме:
I1 хх .max = 12,4 А Þ I1 хх . = 12,4/1,414 = 8,77 А. I1 хх . расч . = 8,82 А.
δI хх = (I1 хх . расч . - I1 хх . )/ I1 хх . расч . = (8,82 – 8,77)/8,82 = 0,006. δI хх = 0,6%.
I1ном. max = 44,33 А Þ I1ном = 31,35 А. I1ном.расч. = 32,5 А.
δI ном = (I1ном.расч. - I1ном. )/ I1ном.расч. = (32,5 – 31,35)/32,5 = 0,035. δI ном = 3,5%.
3.2 Моделирование с параметрами пускового режима
При моделировании с параметрами пускового режима в качестве сопротивлений асинхронного двигателя выставляем сопротивления, рассчитанные в п.2.9:
| r1 |
r2 ’ |
x1 |
x2 ’ |
x12 |
| 0,498 |
0,39 |
0,88 |
0,902 |
56,07 |
Вместо x1 подставляем L1 = x1 /314 = 0,88/314 = 2,8 мГн.
Вместо x2 ’ - L2 ’ = x2 /314 = 0,902/314 = 2,87 мГн.
Вместо x12 - L12 = x12 /314 = 56,07/314 = 178,6 мГн.
При моделировании получены следующие результаты:
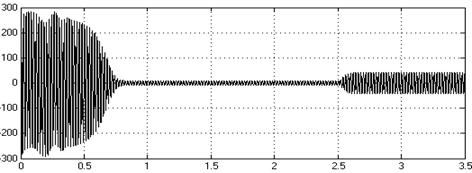
Рис.12. Зависимость пускового тока статора от времени
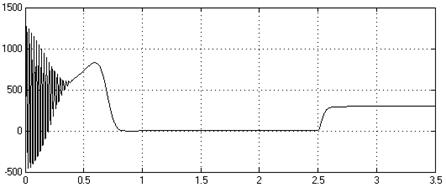
Рис.13. Зависимость пускового момента от времени.
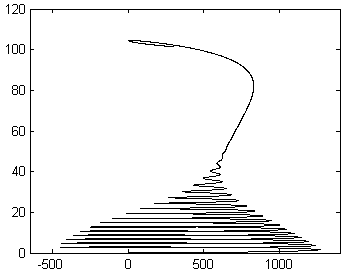
Рис.14. Пусковая механическая характеристика асинхронного двигателя.
По рис.12 имеем: I1п. max = 285 А Þ I1п. = 201,5.
Iп
*
= ![]() = 6,2. Iп.расч
*
= 5,91.
= 6,2. Iп.расч
*
= 5,91.
δI п = (I1п..расч* - I1п* )/ I1п.расч* = (6,2 – 5,91)/5,91 = 0,049. δI п = 4,9%.
По рис.13 имеем: Мп. = (1270,5 - 451)/2 = 40,75 Н*м.
Мп
*
= ![]() = 1,4. Мп.расч
*
= 1,29.
= 1,4. Мп.расч
*
= 1,29.
δМп = (Мп..расч* - Мп* )/ Мп.расч* = (1,4 – 1,29)/1,29 = 0,085. δI п = 8,5%.
|