| Скачать .docx |
Реферат: Сетевые источники питания
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Красноярский Государственный Технический Университет
Институт Радиоэлектроники
Кафедра “Приборостроение”
Отчет по производственной практике
Выполнили:
Студенты гр. Р52-4
В. Абрамович, В. Долгих,
А. Дианов, М. Гайков,
А. Вершинин
Проверил:
А.М. Ситников
Красноярск 2005
Содержание
1. Техника безопасности
1.1 Профилактические мероприятия по ТБ
1.2 Мероприятия по ликвидации возникшей опасности
1.3 Меры пожарной безопасности
2. Общие сведения и основные определения PIC контроллеров на примере PIC16C84
2.1 Основные характеристики PIC контроллеров семейства PIC16CXX
2.2 Микроконтроллер PIC16C84. Краткое описание
2.2.1 Обзор характеристик
2.2.2 Обзор регистров и ОЗУ
2.2.3 Тактовые генераторы
2.2.4 Организация встроенного ПЗУ
2.2.5 Обзор команд и обозначения
2.2.6 Дополнительные режимы работы
3. Многофункциональный частотомер на PIC16F84A
4. Основные типы микрофонных усилителей
4.1 Микрофонный усилитель с симметричной связью
4.2 Двухкаскадный микрофонный усилитель
4.3 Микрофонный усилитель с глубокой АРУ
5. Расчет блока питания
5.1 Расчет трансформатора
5.2 Расчет выпрямителя
5.3 Расчет стабилизатора
Список литературы
1. Техника безопасности
1.1 Профилактические мероприятия по ТБ
Инструктаж радиомеханика.
1. Вводный инструктаж проводится со всеми вновь поступающими на работу, с целью ознакомления с действующей инструкцией по охране труда для данной профессии и для данной работы.
По своему назначению этот вид инструктажа подразделяется на:
а)первичный инструктаж
б)периодический (повторный)
в)внеплановый инструктаж
Защита от поражения электрическим током.
Действие электрического тока на организм человека может быть тепловое (ожог), механическое (разрыв тканей), химическое (электролиз) и биологическое (сокращение мышц, паралич дыхания и сердца).
При воздействии электрического тока на организм человека могут быть два вида поражения: электрические удары и электрические травмы.
Электрические удары - это поражение внутренних органов.
Электрические травмы - это поражение внешних частей тела (ожоги)
Электрические ожоги могут быть разной степени тяжести.
Факторы, влияющие на исход поражения человека электрическим током в основном зависят от сопротивления тела человека, которое в свою очередь зависит от:
а)состояния кожи: неповрежденная, сухая и чистая кожа, а следовательно и тело человека имеет большое сопротивление, до 10000 до 1000000м. Поврежденная, загрязненная и влажная кожа имеет малое сопротивление тела человека;
б)поверхности прикосновения с электродами тока и плотности контакта с электродами;
в)значение и рода электрического тока и приложенного напряжения;
г)частоты тока;
д)длительности прохождения тока;
е)общего состояния нервной системы,
Опасным для человека является ток более 10 мА, при котором человек не может самостоятельно освободиться от токоведущих частей. Ток в 50 мА вызывает тяжелое поражение а ток 100 мА воздействующий более 1 -2с является смертельно опасны.
Переменный ток с частотой 50-1000 Гц опаснее, чем постоянный. Чем меньше время прохождения тока через человека, тем меньше вероятность поражения.
Расчетные параметры
Длительное воздействие тока, с0.1 0,2 0,5 0,7 1.0 3,0
Допустимый ток, мА, 500 250 100 75 50 6
Допустимое напряжение, В 500 250 100 75 50 36
Так же влияет на исход поражение пути прохождения тока. Поражение будет более тяжелым, если пути тока проходят через жизненно важные органы (сердце, грудная клетка, головной и спинной мозг).
По степени поражения электрическим током помещения делятся на три категории:
1.категория - помещения с повышенной опасностью, характеризующиеся наличием в них одного из следующих факторов;
-токопроводящие полы (железобетонные, земляные, кирпичные и т.п.);
-токопроводящая пыль или сырость (при относительной влажности воздуха, длительно превышающей 75%);
-температура длительно превышающая 30°.
2.категория - особо опасные помещения, характеризующиеся наличием одного из следующих условий:
-особая сырость (относительная влажность воздуха близка к 100%);
-химически активная среда;
-одновременное наличие двух или более условий повышенной опасности.
3.категория помещения без повышенной опасности.
Чтобы избежать поражение электрическим током, необходимо соблюдать следующие правила:
1.видеть сигнал (индикаторская лампа, таблица) о включении напряжения, не пробовать наличие напряжение пальцем или отверткой;
2.работать с неисправной блокировкой, не отключать блокировочные элементы;
3.следить за состоянием изоляции;
4.не подключать блоки и приборы к оборудованию находящемуся под напряжением;
5.не измерять напряжение и токи переносными приборами с неизолированными проводами и щупами;
6.не заменять предохранители во включенной аппаратуре;
7.не производить пайку и установку, замену деталей на аппаратуре, находящейся под напряжением, возможны травмирование механика, повреждение аппаратуры;
8.при регулировке на включенной аппаратуре операции производят одной рукой: открытые токонесущие провода и монтаж должны быть хорошо видны; не оставлять включенную аппаратуру более чем на то время, которое необходимо для регулировки и настройки.
При соблюдении мер безопасности нужно правильно пользоваться электроинструментом. Запрещается разбирать его и передавать другим людям. При эксплуатации электроинструмент должен, быть безопасным в работе и иметь недоступные для случайного прикосновения токоведущие части. Напряжение электроинструмента не должно превышать до 220В в помещениях без повышенной опасности; до 42В в помещениях с повышенной опасностью.
Защитными средствами являются: диэлектрические перчатки, коврики, инструменты с изолирующими ручками, указатели напряжения. Также главной защитой человека от поражения электрическим током является защитное заземление- это преднамеренное соединение с землей нетоковедущих металлических частей электроприборов, аппаратуры молниеотводов и разрядников.
Правило ТБ для защиты работающего от механических и других травм:
К травмам различного рода могут привести причины как, неправильное обращение с инструментами, состояние человека неправильное применение тех или иных предметов, приборов и т. д.
Весь рабочий инструмент должен храниться в специальных ящиках, а ручки изолированы. Отвертки должны быть хорошо заточены, чтобы не было срыва при работе. Бокорезы острые. Для защиты от летающих частиц при откусывании провода применяются экраны.
Оборудование рабочего места имеет также очень важное значение. Во-первых рабочее место должно быть оборудовано электросветильником регулирующимся, вытяжкой, стол покрыт пластиком. На рабочем месте не должно быть лишних предметов.
Также важно соблюдать правило безопасности при пайке и пользования электропаяльниками. Пайкой осуществляется неразъемное соединение деталей с помощью припая (Г10С, ПОСК), в состав которого входит свинец, вредный для организма человека. После пайки нужно вымыть руки 1 % раствором уксуса, затем промыть их теплой водой с мылом. При использовании паяльника следует остерегаться брызг припоя и флюсов.
1.2 Мероприятия по ликвидации возникшей опасности
Первая помощь пострадавшему от электрического тока.
Если у пострадавшего сохранилось дыхание, но он без сознания, его следует ровно уложить, расстегнуть одежду, создать приток свежего воздуха. При этом пострадавшему нужно давать нюхать нашатырный спирт, обрызгивать его водой, растирать и согревать тело. Если пострадавший дышит плохо, судорожно (как умирающий), ему следует делать искусственно. Одновременно вызвать врача.
Первая помощь при ожоге:
Необходимо обожженную поверхность перевязать стерильной салфеткой или бинтом. При ожогах глаз вольтовой дугой следует делать холодные примочки из борной кислоты и немедленно вызвать врача.
Первая помощь при ранении:
Во избежании заражения столбняком особое значение нужно уделять ранам загрязненным землей. В этом случае необходимо срочно обратиться к врачу. Также не допускается:
1.Промывать рану водой или какими-то либо растворами, засыпать порошками;
2.Покрывать мазями; нельзя стирать с раны песок; нельзя удалять сгустки крови;
3.Заматывать рану изоляционной лентой и т.п. Следует перевязать рану используя стерильный индивидуальный пакет, или чисты, и конечно вызвать врача.
Первая помощь при кровотечении.
Необходимо, поднять раненую конечность вверх: кровоточащую рану накрыть перевязочным материалом (из пакета) сложенным в комочек, и придавить ее сверху, не касаясь пальцами самой раны, держать 4-5 минут, затем забинтовать рану туго.
При сильном кровотечении сдавить кровеносные сосуды при помощи сгибания конечности в суставе, а также пальцами, жгутом или закруткой. Необходимо срочно вызвать врача.
Первая помощь при переломах, вывихах, ушибах и растяжениях:
Основная задача при переломах и вывихах обеспечить больному неподвижность. Вправлять вывих должен врач. При переломе черепа (бессознательное состояние, кровотечение из ушей или рта) прикладывать к голове холодные предметы. При переломе позвоночника (резкая боль в позвоночнике, невозможно согнуть спину и повернуться) следует осторожно подсунуть под пострадавшего доску, не поднимая его, или повернуть на живот.
Первая помощь при обмороке.
Пострадавшего следует уложить в тени, опустив голову и приподняв ноги, дать воды, нюхать нашатырный спирт. Лед и примочки на голову класть не следует. Вызвать врача.
1.3 Меры пожарной безопасности
При ремонте бытовой РЭА очень важно узнать назначение огнетушителей, их применение. Возникновение пожара может быть не электрического характера и электрического. В нерабочих помещениях, без повышенной опасности применяются пенные огнетушители. Так же может применяться песок. А для тушения аппаратуры, либо других электрических предметов используются углекислотные огнетушители. Порошковые огнетушители предназначены для тушения небольших очагов загорания щелочных металлов, и других соединений. Инструкция по пользованию огнетушителями обязательно нанесена на самом баллоне.
2. Общие сведения и основные определения PIC контроллеров на примере PIC16C84
2.1 Основные характеристики PIC контроллеров семейства PIC16CXX
PIC16CXX - это 8-разрядные микроконтроллеры с RISC архитектурой, производимые фирмой Microchiр Technology. Это семейство микроконтроллеров отличается низкой ценой, низким энергопотреблением и высокой скоростью.
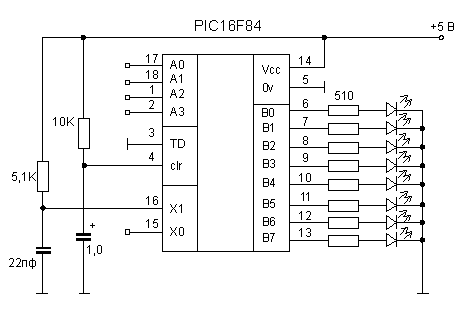
Рис1.1 Пpинципиальная схема устpойства индикации на PIC16F84
Микроконтроллеры имеют встроенное ЭППЗУ программы, ОЗУ данных и выпускаются в 18 и 28 выводных корпусах. PIC OTP - это однократно программируемые пользователем контроллеры, предназначенные для полностью оттестированных и законченных изделий, в которых не будет происходить дальнейших изменений кода. Эти контроллеры выпускаются в дешевых пластиковых корпусах с предварительно заданным типом внешнего генератора - кварцевым или RC. Для отладки программ и макетирования выпускается вариант контроллеров с ультрафиолетовым стиранием. Эти контроллеры допускают большое число циклов записи/стирания и имеют очень малое время стирания - обычно 1-2 минуты. Однако цена таких контроллеров существенно выше, чем однократно программируемых, поэтому их невыгодно устанавливать в серийную продукцию. Для изделий, программа которых может меняться, либо содержит какие-либо переменные части, таблицы, параметры калибровки, ключи и т.д., выпускается электрически стираемый и перепрограммируемый контроллер PIC16F84. Он также содержит электрически перепрограммируемое ПЗУ данных. Именно такой контроллер мы и будем использовать для экспериментов.
СЕМЕЙСТВО PIC16CXX:
Для применений, связанных с защитой информации, каждый PIC имеет бит секретности, который может быть запрограммирован для запрещения считывания программного кода и ПЗУ данных. При программировании сначала записывается программный код, проверяется на правильность записи, а затем устанавливается бит секретности. Если попытаться прочитать микросхему с установленным битом секретности, то для PIC16C5X старшие 8 разрядов кода будут считываться как 0, а младшие 4 разряда будут представлять собой скремблированные 12 разрядов команды. Для PIC16F84 аналогично 7 старших разрядов будут считываться нулями, а 7 младших разрядов будут представлять скремблированные 14 разрядов команды. Электрически перепрограммируемое ПЗУ данных PIC16F84 при установке бита защиты не может быть считано. Микроконтроллеры семейства PIC имеют очень эффективную систему команд, состоящую всего из 35 инструкций. Все инструкции выполняются за один цикл, за исключением условных переходов и команд, изменяющих программный счетчик, которые выполняются за 2 цикла. Один цикл выполнения инструкции состоит из 4 периодов тактовой частоты. Таким образом, при частоте 4 МГц, время выполнения инструкции составляет 1 мксек. Каждая инструкция состоит из 14 бит, делящихся на код операции и операнд (возможна манипуляция с регистрами, ячейками памяти и непосредственными данными).
Высокая скорость выполнения команд в PIC достигается за счет использования двухшинной Гарвардской архитектуры вместо традиционной одношинной Фон-неймановской. Гарвардская архитектура основывается на наборе регистров с разделенными шинами и адресным пространством для команд и для данных. Набор регистров означает, что все программные объекты, такие как порты ввода/вывода, ячейки памяти и таймер, представляют собой физически реализованные аппаратные регистры. Память данных (ОЗУ) для PIC16CXX имеет разрядность 8 бит, память программ (ППЗУ) имеет разрядность 12 бит для PIC16C5X и 14 бит для PIC16CXX. Использование Гарвардской архитектуры позволяет достичь высокой скорости выполнения битовых, байтовых и регистровых операций. Кроме того, Гарвардская архитектура допускает конвейерное выполнение инструкций, когда одновременно выполняется текущая инструкция и считывается следующая. В традиционной же Фон-неймановской архитектуре команды и данные передаются через одну разделяемую или мультиплексируемую шину, тем самым ограничивая возможности конвейеризации. Внутренние физические и логические компоненты, из которых состоит PIC16CXX аналогичны любому другому микроконтроллеру. Поэтому писать программы для PIC не сложнее, чем для любого другого процессора. Конечно, Гарвардская архитектура и большая разрядность команды позволяют сделать код для PIC значительно более компактным, чем для других микроконтроллеров и существенно повысить скорость выполнения программ.[1]
2.2 Микроконтроллер PIC16C84. Краткое описание
PIC16C84 относится к семейству КМОП микроконтроллеров. Отличается тем, что имеет внутреннее 1K x 14 бит EEPROM для программ, 8-битовые данные и 64байт EEPROM памяти данных. При этом отличаются низкой стоимостью и высокой производительностью. Все команды состоят из одного слова (14 бит шириной) и исполняются за один цикл (400 нс при 10 МГц), кроме команд перехода, которые выполняются за два цикла (800 нс). PIC16C84 имеет прерывание, срабатывающее от четырех источников, и восьмиуровневый аппаратный стек.
Периферия включает в себя 8-битный таймер/счетчик с 8-битным программируемым предварительным делителем (фактически 16 - битный таймер) и13 линий двунаправленного ввода/вывода. Высокая нагрузочная способность (25мА макс. втекающий ток, 20 мА макс. вытекающий ток) линий ввода/вывода упрощают внешние драйверы и, тем самым, уменьшается общая стоимость системы. Разработки на базе контроллеров PIC16C84 поддерживается ассемблером, программным симулятором, внутрисхемным эмулятором и программатором.
Серия PIC16C84 подходит для широкого спектра приложений от схем высокоскоростного управления автомобильными и электрическими двигателями до экономичных удаленных приемопередатчиков, показывающих приборов и связных процессоров. Наличие ПЗУ позволяет подстраивать параметры в прикладных программах (коды передатчика, скорости двигателя, частоты приемника и т.д.).
Малые размеры корпусов, как для обычного, так и для поверхностного монтажа, делает эту серию микроконтроллеров пригодной для портативных приложений. Низкая цена, экономичность, быстродействие, простота использования и гибкость ввода/вывода делает PIC16C84 привлекательным даже в тех областях, где ранее не применялись микроконтроллеры. Например, таймеры, замена жесткой логики в больших системах, сопроцессоры.
Следует добавить, что встроенный автомат программирования EEPROM кристалла PIC16C84 позволяет легко подстраивать программу и данные под конкретные требования даже после завершения ассемблирования и тестирования. Эта возможность может быть использована как для тиражирования, так и для занесения калибровочных данных уже после окончательного тестирования.[1]
Обзор характеристик:
- только 35 простых команд;
- все команды выполняются за один цикл(400ns), кроме команд перехода -2 цикла;
- рабочая частота 0 Гц ... 10 МГц (min 400 нс цикл команды)
- 14 - битовые команды;
- 8 - битовые данные;
- 1024 х 14 электрически перепрограммируемой программной памяти на кристалле (EEPROM);
- 36 х 8 регистров общего использования;
- 15 специальных аппаратных регистров SFR;
- 64 x 8 электрически перепрограммируемой EEPROM памяти для данных;
- восьмиуровневый аппаратный стек;
- прямая, косвенная и относительная адресация данных и команд;
- четыре источника прерывания:
а) внешний вход -- INT
б) переполнение таймера -- RTCC
в) прерывание при изменении сигналов на линиях порта -- B
г) по завершению записи данных в память -- EEPROM
Периферия и Ввод/Вывод
- 13 линий ввода-вывода с индивидуальной настройкой;
- втекающий/вытекающий ток для управления светодиодами
. макс втекающий ток - 25 мА
. макс вытекающий ток - 20 мА
- 8 - битный таймер/счетчик RTCC с 8-битным программируемым предварительным делителем;
- автоматический сброс при включении;
- таймер включения при сбросе;
- таймер запуска генератора;
- Watchdog таймер WDT с собственным встроенным генератором, обеспечивающим повышенную надежность;
- EEPROM бит секретности для защиты кода;
- экономичный режим SLEEP;
- выбираемые пользователем биты для установки режима возбуждения встроенного генератора:
- RC генератор : RC
- обычный кварцевый резонатор : XT
- высокочастотный кварцевый резонатор : HS
- экономичный низкочастотный кристалл : LP
- встроенное устройство программирования EEPROM памяти программ и данных; используются только две ножки.
КМОП технология:
- экономичная высокоскоростная КМОП EPROM технология;
- статический принцип в архитектуре;
- широкий диапазон напряжений питания и температур:
. коммерческий: 2.0 ... 6.0 В, 0...+70С
. промышленный: 2.0 ... 6.0 В, -40...+70С
. автомобильный: 2.0 ... 6.0 В, -40...+125С
- низкое потребление
. 3 мА типично для 5В, 4МГц
. 50 мкА типично для 2В, 32КГц
. 26 мкА типично для SLEEP режима при 2В.
Cтруктура PIC16C84:
Архитектура основана на концепции раздельных шин и областей памяти для данных и для команд (Гарвардская архитектура). Шина данных и память данных (ОЗУ) - имеют ширину 8 бит, а программная шина и программная память (ПЗУ) имеют ширину 14 бит. Такая концепция обеспечивает простую, но мощную систему команд, разработанную так, что битовые, байтовые и регистровые операции работают с высокой скоростью и с перекрытием по времени выборок команд и циклов выполнения. 14- битовая ширина программной памяти обеспечивает выборку 14-битовой команды в один цикл. Двухступенчатый конвейер обеспечивает одновременную выборку и исполнение команды. Все команды выполняются за один цикл, исключая команды переходов. В PIC16C84 программная память объемом 1К х 14 расположена внутри кристалла. Исполняемая программа может находиться только во встроенном ПЗУ.
Tипы корпусов и исполнений
Обозначения корпусов для кристаллов PIC16C8x. Тип корпуса указывается в Маркировке при заказе микросхем. Корпуса бывают только с 18 Выводами.
PDIP - Обычный пластмассовый двухрядный корпус. Используется для OTP EPROM версий кристаллов.
SOIC - Малогабаритный DIP корпус для монтажа на поверхность
Исполнения микросхем бывают трех типов: комерческие, для промышлености и для автомобильной электроники. Основное их отличие в температурном диапазоне и рабочем напряжении.
Коммерческое исполнение:
Рабочая температура 0 ... +70 C
Рабочее напряжение 3.0 ... 5.5 В
Исполнение для промышленности:
Рабочая температура -40 .... +85 C
Рабочее напряжение 3.0 ... 5.5 В
Исполнение для автомобилей:
Рабочая температура -40 ... +125 C
Рабочее напряжение 3.0 ... 5.5 В
Mаркировка при заказе:
Обозначение микросхем складывается из следующих полей:
<Фирм.номер>-<Частота ген.> <Темп.диапазон> /<Корпус> <Примеч>
<Фирм.номер бывает>: PIC16C84 - Vdd range 4...6 V
PIC16LC84 Vdd range 2...6 V
<Частота генератора>: 04 ---> 4 mHz
10 ---> 10mHz
Температурный диапазон бывает:
- от 0С до +70С
I от-40С до +85С
E от-40С до +125С
Корпус обозначается:
P - обычный пластмассовый DIP
SO -300 mil SOIC
ПРИМЕРЫ:
PIC16C84-04/Pxxx 4 mHz, коммерческое исполнение в PDIP корпусе, норм.диапазон Vdd, масочное ПЗУ с программой xxx
PIC16LC84-04I/SO 4 mHz, исполнение для промышленности, расширенный диапазон питания, корпус=SOIC
PIC16C84-10E/P исполнение для автомобилей, 10 mHz, PDIP, норм. питание
Максимальные значения электрических параметров
Выход параметров за данные пределы может привести к повреждению микросхемы. Работа кристалла на предельно допустимых значениях в течение длительного времени повлияет на его надежность.
Примечания:
1. Полная рассеиваемая мощность не должна превышать 800 мВт для каждого корпуса. Рассеиваемая мощность вычисляется по следующей формуле:

2. Понижение напряжения на ножке /MCLR ниже Vss(земля) вызывает большие токи, более 80 мА, и может привести к повреждению этой линии. Поэтому, рекомендуется подавать сигналы на ножку /MCLR через ограничивающий резистор 50-100 Ом.[1]
Обзор регистров и ОЗУ:
Все программные объекты, с которыми может работать PIC, представляют собой физические регистры. Чтобы понять, как работает PIC, нужно разобраться с тем, какие регистры у него существуют и как с каждым из них работать. Hачнем с набора операционных регистров. Этот набор состоит из регистра косвенной адресации (f0), регистра таймера/счетчика (f1), программного счетчика (f2), регистра слова состояния (f3), регистра выбора (f4) и регистров ввода/вывода (f5,f6).
Эти регистры представляют основную часть программно-доступных объектов микроконтроллера.
f0...РЕГИСТР КОСВЕHHОЙ АДРЕСАЦИИ IND0: Регистр косвенной адресации f0 физически не существует. Он использует регистр выбора f4 для косвенной выборки одного из 64 возможных регистров. Любая команда, использующая f0, на самом деле обращается к регистру данных, на который указывает f4.
f1...РЕГИСТР ТАЙМЕРА/СЧЕТЧИКА TMR0: Регистр таймера/счетчика TMR0 может быть записан и считан как и любой другой регистр. TMR0 может увеличиваться по внешнему сигналу, подаваемому на вывод RTCC, или по внутренней частоте, соответствующей частоте команд.
Основное применение таймера/счетчика - подсчет числа внешних событий и измерение времени. Сигнал от внешнего или внутреннего источника также может быть предварительно поделен при помощи встроенного в PIC программируемого делителя.
f2...ПРОГРАММHЫЙ СЧЕТЧИК PCL: Программный счетчик (PC) используется для генерации последовательности адресов ячеек ПЗУ программы, содержащих 14-разрядные команды.
Ширина программного счетчика - 13 бит. Младший байт программного счетчика (PCL) доступен для чтения и записи и находится в регистре 02h. Старший байт программного счетчика (PCH) не может быть прямым образом прочитан или записан. Старший байт программного счетчика может быть записан через PCLATH регистр, адрес которого 0Ah. В зависимости от того, загружается ли в программный счетчик новое значение во время выполнения команд CALL, GOTO, или в младший байт программного счетчика (PCL) производится запись, - старшие биты программного счетчика загружаются из PCLATH разными способами
f3...РЕГИСТР СЛОВА СОСТОЯHИЯ STATUS: Регистр слова состояния похож на регистр PSW, существующий в большинстве микропроцессоров. В нем находятся бит переноса, десятичного переноса и нуля, а также биты режима включения и биты страничной адресации.
f4...РЕГИСТР ВЫБОРА FSR: Как было уже сказано, регистр выбора FSR используется вместе с регистром косвенной адресации f0 для косвенной выборки одного из 64 возможных регистров. Физически задействовано 36 регистров ОЗУ пользователя, расположенных по адресам 0Ch-2Fh и 15 служебных регистров, расположенных по различным адресам.
f5, f6...РЕГИСТРЫ ВВОДА/ВЫВОДА PORTA, PORTB Регистры f5 и f6 соответствуют двум портам ввода/вывода, имеющимся у PIC16C84.
Порт A имеет 5 разрядов PA4-PA0, которые могут быть индивидуально запрограммированы как входы или выходы при помощи регистра TRISA, имеющего адрес 85h. Линии PA<3:0> двунаправленные, а линия PA4 -выход с открытым стоком. Адрес регистра порта А - 05h. Относящийся к порту А управляющий регистр TRISA расположен на первой странице регистров по адресу 85h. TRISA<4:0> - это регистр шириной 5 бит. Если бит управляющего TRISA регистра имеет значение единица, то соответствующая линия будет устанавливаться на ввод. Ноль переключает линию на вывод и одновременно выводит на нее содержимое соответствующего регистра защелки.
Порт В - это двунаправленный порт, шириной в восемь бит (адрес регистра 06h). Относящийся к порту В управляющий регистр TRISB расположен на первой странице регистров по адресу 86h. Если бит управляющего TRISB регистра имеет значение единица, то соответствующая линия будет устанавливаться на ввод. Ноль переключает линию на вывод и одновременно выводит на нее содержимое соответствующего регистра защелки. У каждой ножки порта В имеется небольшая активная нагрузка (около 100мкА) на линию питания. Она автоматически отключается, если эта ножка запрограммирована как вывод. Более того, управляющий бит RBPU OPTION<7> может отключить (RBPU=1) все нагрузки. Сброс при включении питания также отключает все нагрузки.
Порт B имеет 8 разрядов PB7-PB0 и программируется при помощи регистра TRISB, имеющего адрес 86h.
Четыре линии порта В (PB<7:4>) имеют способность вызвать прерывание при изменении значения сигнала на любой из них. Если эти линии настроены на ввод, то они опрашиваются и защелкиваются в цикле чтения Q1. Новая величина входного сигнала сравнивается со старой в каждом командном цикле. При несовпадении значения сигнала на ножке и в защелке, генерируется высокий уровень. Выходы детекторов "несовпадений" PB4,PB5,PB6,PB7 объединяются по ИЛИ и генерируют прерывание RBIF (запоминаемое в INTCON<0>). Любая линия, настроенная как вывод, не участвует в этом сравнении. Прерывание может вывести кристалл из режима SLEEP. В подпрограмме обработки прерывания следует сбросить запрос прерывания одним из следующих способов:
1) Запретить прерывания при помощи обнуления бита RBIE INTCON<3>.
2) Прочитать порт В. Это завершит состояние сравнения.
3) Обнулить бит RBIF INTCON<0>.
Прерывание по несовпадению и программно устанавливаемые внутренние активные нагрузки на этих четырех линиях могут обеспечить простой интерфейс например с клавиатурой, с выходом из режима SLEEP по нажатию клавиш. Ножка RB0 совмещена с входом внешнего прерывания INT
Задание 1 в разряде регистра TRIS программирует соответствующий разряд порта как вход. При чтении порта считывается непосредственное состояние вывода, при записи в порт запись происходит в буферный регистр.
Проблемы при организации двунаправленных портов:
-Некоторые команды внутренне выполняются как чтение+запись. Например, команды BCF и BSF считывают порт целиком, модифицируют один бит и выводят результат обратно. Здесь необходима осторожность. Например, команда BSF для бита 5 регистра f6 (порт В) сначала считает все восемь бит. Затем выполняются действия над битом 5 и новое значение байта целиком записывается в выходные защелки. Если другой бит регистра f6 использует я в качестве двунаправленного ввода/вывода (скажем бит 0) и в данный момент он определен как входной, входной сигнал на этой ножке будет считан и записан обратно в выходную защелку этой-же ножки, затирая ее предыдущее состояние.
До тех пор пока эта ножка остается в режиме ввода, никаких проблем не возникает. Однако, если позднее линия 0 переключится в режим вывода, ее состояние будет неопределенным.
На ножку, работающую в режиме вывода, не должны "наваливаться" внешние источники токов("монтажное И", "монтажное ИЛИ"). Результирующие большие токи могут повредить кристалл.
Последовательное обращение к портам ввода/вывода:
Запись в порт вывода происходит в конце командного цикла. Но при чтении, данные должны быть стабильны в начале командного цикла. Будьте внимательны в операциях чтения, следующих сразу за записью в тот же порт. Здесь надо учитывать инерционность установления напряжения на выводах. Может потребоваться программная задержка, чтобы напряжение на ножке (зависит от нагрузки) успело стабилизироваться до начала исполнения следующей команды чтения
f8, f9...РЕГИСТРЫ ЭППЗУ EEDATA, EEADR: PIC16C84 имеет встроенное электрически перепрограммируемое ПЗУ размером 64 байта, которое может быть считано и записано при помощи регистра данных EEDATA и регистра адреса EEADR. Запись нового байта длится около 10 мсек и управляется встроенным таймером. Регистр EECON1 (адрес 88h) - это управляющий регистр шириной пять бит. Младшие пять бит физически существуют, а старшие три бита читаются всегда как `0`.
Управляющие биты RD и WR запускают соответственно чтение и запись. Они могут быть установлены только программно. Сбрасываются- аппаратно по завершения операций чтения/записи. Запрет программного сброса бита WR предотвращает преждевременное окончание записи.
RD - Бит чтения.
RD =1 : Запускает чтение памяти данных EEPROM. Чтение занимает один цикл. Устанавливается программно. Обнуляется аппаратно.
WR - Бит записи.
WR =1 : Запускает запись в память данных EEPROM.
Устанавливается программно. Обнуляется аппаратно.
WREN - Бит разрешения записи в память данных EEPROM.
WREN = 1: Разрешена запись.
WREN = 0: Запрещена запись.
После включения питания WREN обнуляется.
Флаг ошибки WRERR устанавливается, когда процесс записи прерывается сигналом сброса /MCLR или сигналом сброса от WDT таймера. Рекомендуется проверять этот флаг WRERR и при необходимости производить перезапись данных, данные и адрес которых сохраняются в регистрах EEDATA и EEADR.
WRERR - Флаг ошибки записи.
WRERR = 1: Флаг устанавливается, когда операция записи преждевременно прерывается сигналом сброса /MCLR (во время обычного режима или режима SLEEP) или сигналом сброса WDT во время обычного режима.
Флаг EEIF устанавливается, когда встроенный автомат завершает запись в память данных. Он должен быть сброшен программно.
EEIF - Флаг завершения записи.
EEIF = 1: Флаг устанавливается, когда завершена запись. Соответствующий бит разрешения прерывания - EEIE в регистре INTCON [1]
РЕГИСТРЫ ОБЩЕГО HАЗHАЧЕHИЯ
Регистры общего назначения представляют собой статическое ОЗУ, расположенное по адресам 0Ch-2Fh. Всего в PIC16C84 можно использовать 36 ячеек ОЗУ.[1]
СПЕЦИАЛЬHЫЕ РЕГИСТРЫ W, INTCON, OPTION
К ним относятся рабочий регистр W, используемый в большинстве команд в качестве регистра аккумулятора и регистры INTCON и OPTION. Регистр прерываний INTCON (адрес 0Bh) служит для управления режимами прерывания и содержит биты разрешения прерываний от различных источников и флаги прерываний. Регистр режимов OPTION (адрес 81h) служит для задания источников сигнала для предварительного делителя и таймера/счетчика, а также для задания коэффициента деления предварительного делителя, активного фронта сигнала для RTCC и входа прерывания. Кроме того при помощи регистра OPTION могут быть включены нагрузочные резисторы для разрядов порта B, запрограммированных как входы.[1]
СТОРОЖЕВОЙ ТАЙМЕР WDT
Сторожевой таймер WDT предназначен для предотвращения катастрофических последствий от случайных сбоев программы. Watchdog таймер представляет собой полностью независимый встроенный RC генератор, который не требует никаких внешних цепей. Он будет работать, даже если основной генератор остановлен, как это бывает при исполнении команды SLEEP. Таймер вырабатывает сигнал сброса. Выработка таких сбросов может быть запрещена путем записи нуля в специальный бит конфигурации WDTE. Эту операцию производят на этапе прожига микросхем.
Выдержка времени WDT:
Номинальная выдержка WDT составляет 18 мс (без использования делителя). Она зависит от температуры, напряжения питания, от особенностей типов микросхем. Если требуются большие задержки, то к WDT может быть подключен встроенный делитель с коэффициентом деления до 1:128; который программируется путем записи в регистр OPTION. Здесь могут быть реализованы выдержки до 2.5 секунд.
Команды "CLRWDT" и "SLEEP" обнуляют WDT и делитель, если он подключен к WDT. Это запускает выдержку времени сначала и предотвращает на некоторое время выработку сигнала сброс. Если сигнал сброса от WDT все же произошел, то одновременно обнуляется бит "TO" в регистре статуса (f3). В приложениях с высоким уровнем помех, содержимое регистра OPTION подвержено сбою. Поэтому регистр OPTION должен обновляться через равные промежутки времени.
Следует учесть, что наихудшей комбинацией является: Vdd=min, температура=max и max коэффициент деления делителя,- это приводит к самой большой выдержке времени, она может достигать нескольких секунд.[1]
СХЕМА СБРОСА:
Микроконтроллеры семейства PIC используют внутреннюю схему сброса по включению питания в сочетании с таймером запуска генератора, что позволяет в большинстве ситуаций обойтись без традиционного резистора и конденсатора.
В PIC16C84 существуют различия между вариантами сбросов:
1) Сброс по включению питания.
2) Сброс по внешнему сигналу /MCLR при нормальной работе.
3) Сброс по внешнему сигналу /MCLR в режиме SLEEP.
4) Сброс по окончанию задержки таймера WDT при нормальной работе.
5) Сброс по окончанию задержки таймера WDT в режиме SLEEP.
Некоторые из спец.регистров при сбросе не инициализируются. Они имеют случайное состояние при включении питания и не изменяются при других видах сбросов. Другая часть спец.регистров инициализируются в "состояние сброса" при всех видах сброса, кроме сброса по окончанию задержки таймера WDT в режиме SLEEP. Просто этот сброс рассматривается как временная задержка в нормальной работе. Есть еще несколько исключений. Программный счетчик всегда сбрасывается в ноль (0000h). Биты статуса TO и PD устанавливаются или сбрасываются в зависимости от варианта сброса. Эти биты используются программой для определения природы сброса.
Алгоритм сброса при вкл. питания.
Кристалл PIC16C84 имеет встроенный детектор включения питания. Таймер запуска начинает счет выдержки времени после того, как напряжение питания пересекло уровень около 1,2...1,8 Вольт. По истечении выдержки около 72мс считается, что напряжение достигло номинала и запускается другой тайме выдержка на стабилизацию кварцевого генератора. Программируемый бит конфигурации позволяет разрешать или запрещать выдержку от встроенного таймера запуска. Выдержка запуска меняется от экземпляров кристалла, от питания и температуры. Таймер на стабилизацию генератора отсчитывает 1024 импульса от начавшего работу генератора. Считается, что кварцевый генератор за это время вышел на режим. При использовании RC генераторов- выдержка на стабилизацию не производится.
Затем включается таймер ожидания внешнего сброса /MCLR. Это необходимо для тех случаев, когда требуется синхронно запустить в работу несколько PIC контроллеров через общий для всех сигнал /MCLR. Если такого сигнала не поступает, то через время Tost вырабатывается внутренний сигнал сброса и контроллер начинает ход по программе. Время Tost программируется битами конфигурации в EEPROM. Здесь существует проблема, когда Vdd нарастает слишком медленно и все выдержки на запуск, а питание еще не достигло своего минимального значения Vdd(min) работоспособности. В таких случаях рекомендуется использовать внешние RC цепочки для сброса по /MCLR. [1]
ТАКТОВЫЕ ГЕHЕРАТОРЫ
Для микроконтроллеров семейства PIC возможно использование четырех типов тактового генератора:
XT кварцевый резонатор
HS высокочастотный кварцевый резонатор
LP микропотребляющий кварцевый резонатор
RC RC цепочка
Кристаллы PIC16. могут также тактироваться и от внешних источников. Генератор, построенный на кварцевых или керамических резонаторах, требует периода стабилизации после включения питания. Для этого, встроенный таймер запуска генератора держит устройство в состоянии сброса примерно 8 мс после того, как сигнал на /MCLR ножке кристалла достигнет уровня логической единицы. Таким образом, внешняя цепочка RC , связанная с ножкой /MCLR во многих случаях не требуется. Встроенные генераторы работоспособны при определенных номиналах питающего напряжения:
При частотах ниже 500 кГц, внутренний генератор может генерировать сбойный импульс на гармониках, когда переключается бит 0 порта A. Этого не происходит при использовании внешнего генератора или при встроенном RC генераторе.
Генератор на кварцах: PIC16C84-XT, -HS или -LP требуют подключения кварцевого или керамического резонатора к выводам OSC1 и OSC2.
Маркировка следующая: XT - стандартный кварцевый генератор, HS - высокочастотный кварцевый генератор, LP - низкочастотный генератор для экономичных приложений. Резистор Rs может потребоваться для генератора "HS", особенно при частотах ниже 20 МГц для гашения гармоник. Для керамического резонатора более высокая емкость будет увеличивать стабильность генератора, но также будет увеличивать время запуска. В режимах HS и XT, чтобы избежать гармоник может потребоваться последовательный резистор Rs.
RC генератор: Когда не предъявляются требования к быстродействию и к точности по времени, ОТР кристалл, например PIC16C84-RC, позволяет сэкономить деньги и реализовать простой RC генератор.
Частота есть функция питающего напряжения, значений резистора Rext, конденсатора Cext и температуры. Кроме того, частота генератора будет незначительно изменяться от партии к партии. На частоту генерации влияет собственная емкость корпуса кристалла, ее влияние заметно для малых значений Cext. Нужно принять во внимание также дрейф R и C элементов. Для значений Rext ниже 2.2 кОМ генератор может работать нестабильно или не заводиться. При очень больших значениях Rext ( напр. 1 МОм) генератор становится чувствительным к помехам, влажности и монтажным утечкам тока.
Рекомендуемая величина Rext находится между 5 КОм и 100 КОм. Хотя генератор работоспособен и при отсутствии внешнего конденсатора (Cext = 0), С малой Cext, или вообще без нее, частота генератора сильно зависит от монтажных емкостей. Разброс будет тем больше, чем больше величина R.
Сигнал с частотой генератора, деленной на 4, присутствует на ножке OSC2/CLKOUT, и может быть использован для целей тестирования или синхронизации других схем.[1]
Организация встроенного ПЗУ:
Программный счетчик в PIC16C84 имеет ширину 13 бит и способен адресовать 8Кх14бит объема программной памяти. Однако, физически на кристалле имеется только 1Кх14 памяти (адреса 0000h-03FFh). Обращение к адресам выше 3FFh фактически есть адресация в тот же первый килобайт. Вектор сброса находится по адресу 0000h, вектор прерывания находится по адресу 0004h.
EEPROM PIC16C84 рассчитан на ограниченное число циклов стирания/записи. Чтобы записать в программную память, кристалл должен быть переведен в специальный режим при котором на ножку /MCLR подается напряжение программирования Vрrg, а питание Vdd должно находиться в пределах 4.5 В ... 5.5В. PIC16C84 непригоден для применений, в которых часто модифицируется программа. Запись в программную память осуществляется побитно, последовательно с использованием только двух ножек.
Стек и возвраты из подпрограмм:
Кристалл PIC16C84 имеет восьмиуровневый аппаратный стек шириной 13 бит. Область стека не принадлежит ни к программной области ни к области данных, а указатель стека пользователю недоступен. Текущее значение программного счетчика посылается в стек, когда выполняется команда CALL или производится обработка прерывания. При выполнении процедуры возврата из подпрограммы команды RETLW , RETFIE или RETURN, в программный счетчик выгружается содержимое стека. Регистр PCLATH (0Ah) не изменяется при операциях со стеком.
Долговременная Память данных EEPROM:
Память данных EEPROM позволяет прочитать и записать байт информации. При записи байта автоматически стирается предыдущее значение и записываются новые данные (стирание перед записью). Все эти операции производит встроенный автомат записи EEPROM. Содержимое ячеек этой памяти сохраняется при выключении питания. Кристалл PIC16C84 имеет память данных 64х8 EEPROM бит, которая позволяет запись и чтение во время нормальной работы (во всем диапазоне питающих напряжений). Эта память не принадлежит области регистров ОЗУ. Доступ к ней осуществляется через два регистра: EEDATA <08h>, который содержит в себе восьмибитовые данные для чтения/записи и EEADR <09h>, который содержит в себе адрес ячейки к которой идет обращение. Дополнительно имеется два управляющих регистра: EECON1 <88h> и EECON2 <89h>.
При считывании данных из памяти EEPROM необходимо записать требуемый адрес в EEADR регистр и затем установить бит RD EECON1<0> в единицу. Данные появятся в следующем командном цикле в регистре EEDATA и могут быть прочитаны. Данные в регистре EEDATA защелкиваются.
При записи в память EEPROM, необходимо сначала записать требуемы адрес в EEADR регистр и данные в EEDATA регистр. Затем выполнить специальную последовательность команд, производящую непосредственную запись:
movlv 55h
movwf EECON2
movlv AAh
movwf EECON2
bsf EECON1,WR ;установить WR бит, начать запись
Во время выполнения этого участка программы, все прерывания должны быть запрещены для точного выполнения временной диаграммы. Время записи - примерно 10мс. Фактическое время записи будет изменяться в зависимости от напряжения, температуры и индивидуальных свойств кристалла. В конце записи бит WR автоматически обнуляется, а флаг завершения записи EEIF, он же запрос на прерывание, устанавливается.
Для предотвращения случайных записей в память данных предусмотрен специальный бит WREN в регистре EECON1. Рекомендуется держать бит WREN выключенным, кроме тех случаев, когда нужно обновить память данных. Более того, кодовые сегменты, которые устанавливают бит WREN и те, которые выполняют запись должны храниться на различных адресах, чтобы избежать случайного выполнения их обоих при сбое программы.[1]
Обзор команд и обозначения.
Каждая команда PIC16C84 – это 14-битовое слово, которое разделено по смыслу на следующие части: - 1. код операции, -2. поле для одного и более операндов, которые могут участвовать или нет в этой команде. Система команд PIC16C84 включает в себя байт-ориентированные команды, бит-ориентированные, операции с константами и команды передачи управления.
Для байт-ориентированных команд «f» обозначает собой регистр, с которым производится действие; «d» – бит определяет, куда положить результат. Если «d» =0, то результат будет помещен в W регистр, при «d»=1 результат будет помещен в «f», упомянутом в команде. Для бит-ориентированных команд «b» обозначает номер бита, участвующего в команде, а «f» –это регистр , в котором этот бит расположен.
Для команд передачи управления и опреаций с константами, «k» обозначает восьми или одиннадцатибитную константу.
Все команды выполняются в течение одного командного цикла. В двух случаях исполнение команды занимает два командных цикла: -1. проверка условия и переход, -2.изменение программного счетчика как результат выполнения команды. Один командный цикл состоит из четырех периодов генератора. Таким образом, для генератора с частотой 4 МГц время исполнения командного цикла будет 1 мкс.[1]
Дополнительные режимы работы:
Конфигурационное слово:
Кристалл PIC16C84 имеет пять битов конфигурации, которые хранятся в EEPROM и устанавливаются на этапе программирования кристалла. Эти биты могут быть запрограммированы (читается как `0`) или оставлены не- запрограммироваными (читается `1`) для выбора подходящего варианта конфигурации устройства. Эти биты расположены в EEPROM памяти по адресу 2007h. Пользователю следует помнить, что этот адрес находится ниже области кодов и недоступен программе. Ячейка EEPROM конфигурации.
CP - Бит защиты кода.
CP = 1: Код защиты выключен
CP = 0: Код защиты включен
Остальные биты в слове не используются и читаются как единицы.
Индивидуальная метка:
Кристалл PIC16C84 имеет четыре слова, расположенные по адресу (2000h-2003h) Они предназначены для хранения идентификационного кода (ID) пользователя, контрольной суммы или другой информации. Как и слово конфигурации, они могут быть прочитаны или записаны только с помощью программатора. Доступа по программе к ним нет. Если кристалл защищен, пользователю рекомендуется использовать для идентификации только младшие семь бит каждого ID слова, а в старший бит записывать `0`. Тогда ID слова можно будет прочитать даже в защищенном варианте.
Защита программ от считывания:
Программный код, который записан в кристалл, может быть защищен от считывания при помощи установки бита защиты (CP) в слове конфигурации в ноль. Содержимое программы не может быть прочитано так, что с ним можно было бы работать. Кроме того, при установленном бите защиты становится невозможным изменять программу. То-же относится и к содержимому памяти данных EEPROM.
Если установлена защита, то бит CP можно стереть только вместе с содержимым кристалла. Сначала будет стерта EEPROM программная память и память данных и в последнюю очередь бит защиты кода CP.
Проверка кристалла с установленной защитой. При считывании защищенного кристалла, чтение любого адреса памяти даст результат, похожий на 0000000XXXXXXX(двоичный код), где X- это 0 или 1. Чтобы проверить сохранность памяти в защищенном кристалле, следуйте правилам:
1) запрограммируйте и проверьте работу исправного кристалла.
2) установите защиту кода программы и считайте содержимое программной памяти в файл-эталон.
3) проверяйте любой защищенный кристалл путем сравнения его программной памяти с содержимым этого эталона.
Память данных EEPROM не может быть проверена после установки бита защиты.
Режим пониженного энергопотребления:
Вход в режим SLEEP осуществляется командой SLEEP. По этой команде, если WDT разрешен, то он сбрасывается и начинает счет времени, бит "PD" в регистре статуса (f3) сбрасывается, бит "TO" устанавливается, а встроенный генератор выключается. Порты ввода/вывода сохраняют состояние, которое он имели до входа в режим SLEEP. Для снижения потребляемого тока в этом режиме, ножки на вывод должны иметь такие значения, чтобы не протекал ток между кристаллом и внешними цепями. Ножки на ввод должны быть соединены внешними резисторами с высоким или низким уровнем, чтобы избежать токов переключения, вызываемых плавающими высокоомными входами. То же и про RTCC. Ножка /MCLR должна быть под напряжением Vihmc.
Выход из режима SLEEP осуществляется в результате следующих событий:
1. Внешний сброс - импульс низкого уровня на на ножке /MCLR.
2. Сброс при срабатывании WDT(если он разрешен)
3. Прерывания. (Прерывание с ножки INT, прерывание при изменении порта B, прерывание при завершении записи данных EEPROM).
При первом событии происходит сброс всего устройства. Два других события предполагают продолжение выполнения программы. Бит "PD" в регистре статуса (f3), который устанавливается при включении, но обнуляется командой "SLEEP", может быть использован для определения состояния процессора до "просыпания": или процессор был в режиме "SLEEP"(горячий старт), или было просто выключено питание (холодный старт). Бит "TO" позволяет определить, чем был вызван выход из режима SLEEP: или внешним сигналом на ножке /MCLR, или срабатыванием WDT.
Чтобы устройство вышло из режима SLEEP через прерывание, это прерывание должно быть разрешено установкой соответствующей маски в регистре INTCON. При выходе из режима SLEEP будет выполняться фоновая программа, если общая маска запрещает все прерывания (GIE=0). Если GIE=1, то будет выполняться подпрограмма обработки прерываний.[1]
3. Многофункциональный частотомер на PIC16F84A
Основные технические характеристики описываемого частотомера следующие: диапазон измерения частоты — 0,1 Гц...60 МГц (реально верхняя граница выше); порог чувствительности по входному напряжению — 0,08...0,15 В (амплитудное значение); минимальное надежно фиксируемое прибором значение частоты синусоидального сигнала — 2 Гц (амплитудой 0,15 В); максимальная амплитуда входного сигнала — 3 В. Питается прибор от батареи типа "Крона" (возможно использование внешнего источника напряжением 7...16 В), потребляемый ток — 10... 12 мА. Предусмотрено изменение времени измерения (0,1; 1 и 10 с), умножение показаний на 1000 (при применении внешнего делителя частоты), удержание показаний, запись одного значения частоты в энергонезависимую память и возможность последующего считывания.
Принципиальная схема частотомера изображена на рис. 3.1.
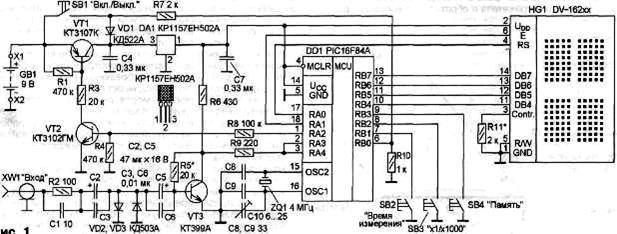
Рис 3.1. Многофункциональный частотомер
Его основа — микроконтроллер PIC16F84A, который осуществляет счет импульсов внешнего сигнала, обработку полученных значений и вывод результатов измерения на ЖКИ. В функции микроконтроллера также входят опрос кнопок (SB1—SB4) и управление питанием прибора.
Включают и выключают частотомер кнопкой SB1. После подсоединения батареи питания (или подачи напряжения от внешнего источника) прибор остается в выключенном состоянии. При нажатии на кнопку SB1 напряжение питания через диод VD1 поступает на интегральный стабилизатор напряжения DA1, а с его выхода — на входной каскад (VT3), микроконтроллер DD1 и индикатор HG1. Затем на выводе 1 (RA2) микроконтроллера появляется высокий логический уровень, что приводит к открыванию транзисторов VT1 и VT2. Далее контроллер ожидает отпускания кнопки SB1 (контролируя сигнал на выводе 6). После размыкания ее контактов напряжение питания подается на вход стабилизатора DA1 через открытый транзистор VT1 и начинается измерение частоты.
Во время удержания SB1 на экране индикатора (рис. 3.2,а) высвечиваются надписи "ЧАСТОТОМЕР" и "ВЕРСИЯ: 1.00" (версия пришивки контроллера). При повторном нажатии нa SB1 напряжение питания поступает на вывод 6 (RB0) микроконтроллера, который после этого ожидает размыкания ее контактов, и когда это произойдет, устанавливает низкий логический уровень на выводе 1 (RA2).
В результате транзисторы VT1, VT2 закрываются и прибор обесточивается. Если в режиме измерения на индикаторе отображаются нулевые показания в течение примерно 3 мин, микроконтроллер устанавливает низкий логический уровень на выводе 1 (RA2), тем самым отключая себя от источника питания.
Время измерения, выбранное кнопкой SB2 (0,1; 1 или 10 с), отображается в правой части нижней строки индикатора (рис. 3.2,б). Цена младшего разряда — 10,1 или 0,1 Гц соответственно. При времени измерения 0,1; 1 и 10 с максимально на ЖКИ может отображаться семь, восемь или девять разрядов, т. е. максимальное отображаемое значение равно соответственно 99,999.99, 99,999.999 или 99,999.999.9 МГц.
Нажатием кнопки SB3 показания частоты умножают на 1000. Это сделано для удобства считывания показаний при использовании внешнего делителя на 1000 [1, 2]. Коэффициент умножения ("х1" или "х1000") отображается в середине нижней строки.
Чтобы удержать (зафиксировать) показания, нажимают кнопку SB4 ("Память"). При этом на ЖКИ остается значение той частоты, которое было в момент нажатия кнопки. Его можно сохранить в энергонезависимой памяти микроконтроллера, воспользовавшись кнопкой SB2, функция которой в этом случае — "Запомнить" (рис. 3.2, в). Прежнее значение при этом теряется. Если необходимо считать частоту из памяти, нажимают на SB3 (ее новая функция — "Считать"). Для выхода из режима работы с памятью используют кнопку SB4 (новая функция — "Выход"). В режиме работы с памятью частотомер автоматически выключается примерно через 3 мин после нажатия на любую кнопку независимо от показаний индикатора. После выключения питания в энергонезависимой памяти сохраняются последние параметры измерения (время измерения и множитель).
В качестве VT1, VT2 в приборе можно применить любые транзисторы указанных на схеме серий. Стабилизатор КР1157ЕН502А заменим на 78L05, LM2931Z (при использовании последнего нижняя граница напряжения питания снизится до 5,5 В, а потребляемый ток уменьшится на 2 мА).
ЖКИ должен иметь встроенный контроллер с системой команд, совместимой с командами контроллера HD44780, и русские символы в таблице знакогенератора (практически все знакосинтезирующие ЖКИ удовлетворяют этому условию). Пригодны, например, индикаторы DV-16210, DV-16230, DV-16236, DV-16244, DV-16252 (DataVision), ITM-1602 (Intech), PC-1602 (PowerTip).
Калибруют частотомер по образцовому генератору с помощью подстроечного конденсатора С10. Подбором резистора R5 добиваются максимальной чувствительности прибора по напряжению. Контрастность выводимых показаний индикатора регулируют подбором резистора R11. Если функции автоматического .выключения питания и управления питанием одной кнопкой не нужны, прибор можно упростить, исключив транзисторы VT1, VT2, диод VD1, резисторы R1, R3, R4, R7, R8, R10 и кнопку SB1. Вывод 6 микроконтроллера в этом случае соединяют с общим проводом, а напряжение питания подают непосредственно на вход DA1. Изображение готового устройства приведено в Приложении 1. [2]
4. Микрофонные усилители
4.1 Микрофонный усилитель с симметричной связью
Микрофонный усилитель - еще одна область применения микросхем, где важен малый уровень собственных шумов. Такой усилитель должен иметь, как правило, линейную АЧХ в номинальном диапазоне частот и обладать достаточно высокой перегрузочной способностью
Для борьбы с фоном переменного тока сетевой частоты, наводимым на соединительные кабели, в высококачественных микрофонных усилителях используют симметричный вход, реализуемый, как правило, на сложных в изготовлении и требующих тщательного экранирования от внешних магнитных полей симметрирующих трансформаторах. На рисунке 4.1.1. показана схема микрофонного усилителя, позволяющая обойтись без такого нетехнологичного элемента, как трансформатор.
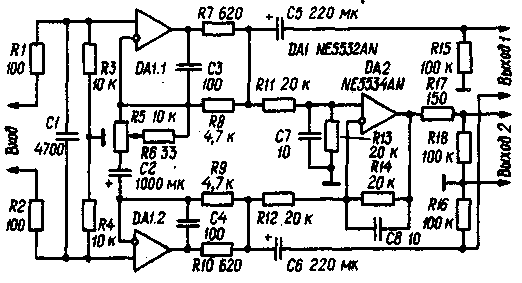
Рис 4.1.1. Микрофонный усилитель с симметричным входом
Основой устройства служит дифференциальный усилитель на ОУ DA1.1 и DA1.2. Его коэффициент усиления Ку=1+(R8+R9)/Rэ (Rэ - эквивалентное сопротивление соединенных последовательно резисторов R6 и введенной в цепь части резистора R5) и может регулироваться в пределах от 1,5 до 140 резистором R5. Усиленный сигнал через разделительные конденсаторы С5 и С6 поступает на симметричный Выход 1, а через второй дифференциальный усилитель (ОУ DA2) - на несимметричный Выход 2.
Так как современные ОУ обладают почти идеальным (более 70 дБ) подавлением синфазного сигнала, помехозащищенность усилителя определяется практически лишь согласованностью сопротивлений резисторов R3 и R4, R8 и R9, R11 и R12. R13 и R14 и, если они не отличаются от указанных на схеме более чем на 1 %, не уступает помехозащищенности лучших устройств с трансформаторным входом.
Входное сопротивление усилителя - 10 кОм. Питают его от двуполярного стабилизированного источника напряжением ±10 В.
В данном усилителе можно использовать отечественные ОУ К157УД2, КР1407УДЗ и (при снижении напряжения литания до ±.6 В) КФ1407УД4 [3]
4.2 Двухкаскадный микрофонный усилитель
Размещение микрофонного усилителя в непосредственной близости от микрофона резко -- ослабляет требования к экранировке соединительных проводов и улучшает отношение сигнал/фон. Однако при этом возникает новая проблема, связанная с питанием микрофонного усилителя: встроенная батарея требует частой замены, а использовать дополнительный провод питания не всегда удобно.
На рисунке 4.2.1. приведена схема двухкаскадного микрофонного усилителя питание которого осуществляется по сигнальному проводу. В основной усилитель при этом нужно добавить лишь один резистор R4, служащий нагрузкой микрофонного усилителя, и разделительный конденсатор С2. Смещение на базе транзистора Т1 и температурную стабилизацию всего усилителя обеспечивает делитель R2R3 в цепи эмиттера транзистора Т2. Второй каскад усилителя охвачен отрицательной обратной связью через резистор RI, являющийся одновременно нагрузкой первого каскада.
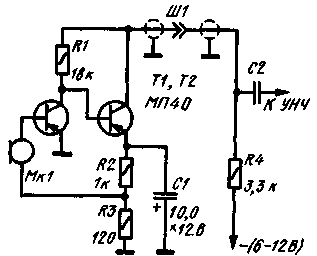
Рис. 4.2.1. Двухкаскадный микрофонный усилитель
Обратная связь снижает нелинейные искажения до пренебрежимо малой величины и уменьшает выходное сопротивление усилителя до стандартного значения 600 Ом.
Амплитудно-частотная характеристика усилителя в области низших звуковых частот определяется емкостями конденсаторов С1 и С2. Емкость конденсатора С2 рассчитывается по формуле: С2=160/(fнRвх), мкф, где fн - низшая рабочая частота усилителя, Гц; Rвх - входное сопротивление основного усилителя, кОм. При емкости конденсатора С1, указанной на схеме, низшая рабочая частота равна 16 Гц.
Коэффициент усиления микрофонного усилителя получается порядка 150-250 и зависит от значений коэффициента Вст примененных транзисторов и от напряжения питания. Усилитель хорошо работает с низкоомными динамическими микрофонами, имеющими сопротивление постоянному току 100-600 Ом. В нем можно использовать любые низкочастотные транзисторы.
Налаживание микрофонного усилителя сводится к проверке коллекторного напряжения транзистора Т2, оно должно быть равно половине напряжения питания. Если необходимо, в небольших пределах подбирают сопротивление резистора R3, определяющего ток второго каскада усилителя. При использовании усилителя для телефонной связи или речевого репортажа емкость конденсатора С1 целесообразно уменьшить до 0,5- 1 мкф, что вызовет завал низших звуковых частот соответственно до 320 и 160 Гц. [3]
4.3 Микрофонный усилитель с глубокой АРУ
Схема микрофонного усилителя отличается от аналогичных, опубликованных в литературе, малыми габаритами и глубокой автоматической регулировкой усиления (АРУ). Это позволяет использовать ее в составе радиостанции или кассетного магнитофона. Все устройство выполнено на одной микросхеме, имеющей в своем корпусе четыре универсальных операционных усилителя. (рис 4.3.1.)
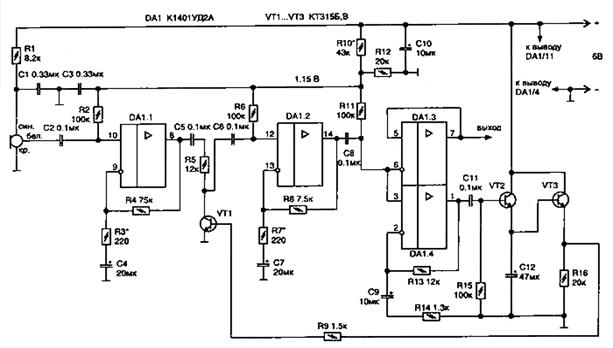
Рис. 4.3.1. Микрофонный усилитель с глубокой АРУ.
На элементе микросхемы DA1.1 собран неинвертирующий предварительный усилитель сигнала с микрофона. Это необходимо для эффективной работы автоматической регулировки усиления и снижения уровня шумов. Регулировка коэффициента передачи сигнала между каскадами осуществляется за счет изменения внутреннего сопротивления открытого транзистора VT1, включенного в делитель напряжения, образованный совместно с резистором R5. В исходном состоянии (при низком уровне входного сигнала) VT1 заперт и на прохождение сигнала влияния не оказывает.
Второй каскад усилителя собран на элементе DA1.2. Полоса усиливаемых частот от 50 Гц до 50 кГц. Номинальное выходное напряжение 200 мВ. Элемент DA1.3 является повторителем сигнала, что улучшает согласование схемы с нагрузкой.
Для работы системы АРУ используется усилитель на DA1.3 и детектор уровня сигнала на транзисторах VT2, VT3. Время восстановления схемы (инерционность) задается конденсатором С12. При изменении входного напряжения на 50 дБ — выходное меняется не более чем в 2 раза. В схеме применены полярные конденсаторы типа К50-16, остальные К10-17; резисторы МЛТ.
При правильной сборке схема будет работать сразу, но элементы, отмеченные звездочкой "*", могут потребовать подбора. Так, изменением величины резистора R10 необходимо добиться в точке делителя, указанной на схеме, напряжения 1,15 В. Это напряжение подается на входы усилителей и обеспечивает начальное смещение для работы микросхем на линейном участке характеристики. В этом случае, при перегрузке, ограничение сигнала будет симметричным. От номиналов резисторов R3 и R7 зависит коэффициент усиления каскадов.[3]
5. Расчет блока питания
Подавляющее большинство радиолюбительских конструкций получает питание от электросети через блок питания. Он обычно содержит сетевой трансформатор, диодный выпрямитель и оксидный сглаживающий конденсатор большой емкости. К вспомогательным, но нужным устройствам относятся выключатель, предохранитель и индикатор включения — миниатюрная лампа накаливания, с номинальным напряжением, несколько большим напряжения вторичной обмотки трансформатора (лампы, горящие с недокалом, гораздо дольше служат).
Стабилизатор напряжения, если он имеется, включается между выходом выпрямителя и нагрузкой. Напряжение на его выходе, как правило, меньше Uвых, и на стабилизаторе тратится заметная мощность.
5.1 Расчет трансформатора
Силовой трансформатор обычно состоит из двух или более обмоток, намотанных на общем железном сердечнике. Одна обмотка - сетевая (первичная), на неё подается переменное напряжение из сетевой розетки. Это напряжение переменное, поэтому, магнитное поле, создаваемое этой обмоткой в сердечнике все время меняется и пронизывает витки вторичной обмотки (или вторичных обмоток, если их несколько).
Номинальная мощность (Р) - сумма мощностей вторичных обмоток трансформатора, в которой мощность каждой обмотки определяется как произведения номинального выходного тока обмотки на номинальное напряжение. Например, номинальный выходной ток 2А, а, при таком токе, номинальное напряжение на концах обмотки 10 V. Таким образом, номинальная мощность будет 2А* 10V = 20W.
Коэффициент трансформации (N) - соотношение входного напряжения и выходного, численно равное соотношению числа витков первичной (сетевой) обмотки к числу витков вторичной. Например, есть трансформатор, у которого на первичную обмотку подается 220V, при этом на вторичной будет 11 V. Коэффициент трансформации будет равен отношению 220 /11 = 20.
И так, допустим нужен трансформатор, на первичную обмотку которого подается переменное напряжение 220V, при этом на вторичной обмотке должно быть напряжение 11V, а номинальный ток на выходе должен быть 1 А. Значит, мощность на нагрузке вторичной обмотки будет Р=11V * 1А=11W. Определим коэффициент трансформации : N=220/11=20. Определим мощность трансформатора:
![]()
на всякий случай возьмем Ра побольше, - 13W.
Большинство трансформаторов имеют Ш-образные сердечники (рис. 5.1.1.).
Рассчитаем площадь сечения такого сердечника:
![]() .
.
Таким образом, площадь сечения Ш-образного сердечника для нашего трансформатора должна быть 4,3 квадратных сантиметра. Далее, нужно рассчитать необходимое число витков (Н) на 1V напряжения:
![]()
Итак, на 1 V напряжения требуется 10,5 витков. Теперь определим сколько витков нужно намотать в первичной (сетевой) обмотке : 220V • 10,5 = 2310 витков.
Во вторичной обмотке: 11V • 10,5 = 115,5 витков.
Следующее, что мы должны узнать, - это диаметр провода для намотки обмоток. Ток во вторичной обмотке (I2) мы знаем - 1А, мы его задали в самом начале, Так, что, диаметр провода для вторичной обмотки (D2) берем по формуле:
![]() .
.
Таким образом, диаметр провода для вторичной обмотки должен быть около 0,8 мм.
Теперь нужно рассчитать диаметр провода для первичной обмотки, но для этого нужно сначала найти ток I1 через неё. Для этого нужно знать мощность (Ра) и напряжение. Напряжение (U) нам известно - 220V, а мощность мы определили - 13 W.
I1=P/U = 13/220 = 0,059A.
Это дает нам определить диаметр провода для первичной обмотки (D1):
![]()
Кроме приведенных формул, диаметр провода можно определить по графику (рис 5.1.2.), исходя из допустимой для трансформаторов плотности тока 2..3 А/мм2
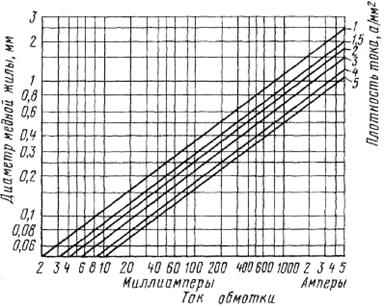
Рис 5.1.2.
В итоге для нашего трансформатора нам нужен Ш-образный сердечник сечением не менее 4,3 см2. Еще нужен намоточный провод, например, ПЭВ, диаметром 0,19-0,2 для сетевой обмотки и 0,76-0,9 для вторичной. [4,7]
5.2 Расчет выпрямителя
После трансформатора в сетевом источнике питания, обычно, следует выпрямитель. Выпрямитель служит для преобразования переменного напряжения на вторичной обмотке силового трансформатора в постоянное напряжение. Выпрямители делаются на диодах, используется свойство диода пропускать ток только в одном направлении. Существует несколько видов выпрямителей -однополупериодные, двухполупериодные с выводом средней точки, мостовые, с удвоением напряжения. Поскольку выпрямитель построен на диодах, которые пропускают ток только в одном направлении, то на его выходе получается не постоянное, а пульсирующее напряжение, чтобы сделать его постоянным на выходе выпрямителя включают электролитический конденсатор. Во время полуволн пульсаций на конденсаторе накапливается напряжение, а в промежутках между ними (когда синусоида сетевого напряжения проходит через нуль) конденсатор отдает энергию в нагрузку. Таким образом он сглаживает пульсации и на нем получается уже постоянное напряжение, а не пульсирующее.
Схема однополупериодного выпрямителя показана на рисунке 5.2.1.
Это просто диод, через который переменное напряжение от трансформатора поступает на конденсатор Положительные полуволны проходят через диод на выпрямитель, а отрицательные не проходят таким образом, положительные полуволны поддерживают конденсатор заряженным, а напряжение с конденсатора поступает в нагрузку.
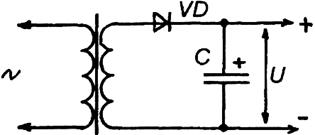
Рис. 5.2.1. Однополупериодный конденсатор
Достоинство такого выпрямителя в минимальном числе деталей. Недостаток в низкой частоте пульсаций, и как следствие, для сглаживания пульсаций требуется конденсатор большей емкости.
Такие выпрямители применяются, когда не требуется низкий уровень пульсаций. Обычно для питания устройств потребляющих небольшой ток или сильноточных схем, в которых уровень пульсаций большого значения не имеет. Следует заметить, что при питании номинальной нагрузки, выходное постоянное напряжение будет ниже входного переменного.
В данном типе выпрямителей зарядка конденсатора происходит тогда, когда диод открывается, то есть на положительных полуволнах переменного напряжения. На отрицательных полуволнах конденсатор разряжается только через нагрузку, потому что диод на отрицательных полуволнах закрыт. Вот и получается, что на холостом ходу, когда нет нагрузки, то есть, разрядной цепи, напряжение на конденсаторе может достигнуть амплитудного значения переменного напряжения (то есть, быть даже больше действующего переменного напряжения). С подключением нагрузки это напряжение будет снижаться. И степень этого снижения будет зависеть от тока протекающего через нагрузку, то есть, разрядного тока, а так же, и от емкости конденсатора и множества других факторов (сопротивления вторичной обмотки трансформатора или внутреннего сопротивления источника переменного напряжения, прямого и обратного сопротивления диода, тока утечки конденсатора и т.д.).
Этот недостаток, свойственный практически всем выпрямителям. Недостаток устраняется, обычно, установкой конденсатора большей емкости или при помощи стабилизаторов.
На основе однополупериодного выпрямителя несложно сделать двуполярный источник питания (рис. 5.2.2), например, для питания схемы на операционном усилителе. Здесь два выпрямителя, диод одного пропускает только положительные полуволны, диод второго– только отрицательные.
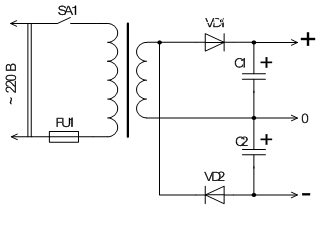
Рис 5.2.2. Однополупериодный выпрямитель
В результате, на конденсаторе получаются равные по модулю, но противоположные по знаку напряжения.
Точно такую же схему имеет и выпрямитель с удвоением напряжения (рис. 5.2.3.). Только нулевая точка не подключена. Выпрямитель с удвоением выгоден, если нужно получить напряжение побольше, чем может обеспечить имеющийся трансформатор. Фактически, он выдает напряжение в 2 раза превышающее напряжение выпрямителя напряжения, показанного на рис. 5.2.1.
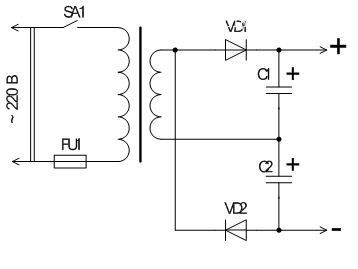
Рис. 5.2.3. Выпрямитель с удвоением
Двухполупериодная схема (рис. 5.2.4.) характеризуется повышенной частотой пульсаций, потому что на диоды подаются напряжения с разных противоположных концов обмотки. Поэтому частота пульсация удваивается (получается не 50Гц, а 100Гц). Это выгодно в том смысле, что для получения такого же сглаживания пульсаций как в однополупериодном выпрямителе требуется меньшая емкость конденсатора.
Вообще, это нужно учитывать в дальнейшем, потому что, чем выше частота выпрямленного переменного тока, тем меньше может быть емкость сглаживающего конденсатора.
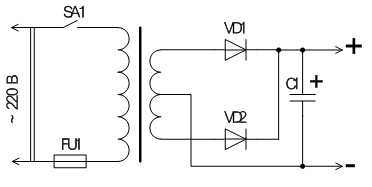
Рис. 5.2.4. Двухполупериодная схема выпрямителя
Недостаток двухполупериодной схемы в том, что необходим трансформатор, у которого есть отвод от середины вторичной обмотки, и число витков (суммарное) вторичной обмотки получается в два раза больше.
Мостовая схема (рис. 5.2.5.) – самая популярная схема выпрямителя, она отличается тем, что обеспечивает удвоенную частоту пульсация при работе от обмотки без отводов, имеющей число витков такое же, как в схеме однополупериодного выпрямителя. То есть те же преимущества, что и в двухполупериодной схеме, но для этого удваивать число витков вторичной обмотки трансформатора и делать от нее отводы не нужно.
Теперь рассчитаем выпрямитель (рис. 5.2.5). Допустимый прямой средний ток диодов в мостовой схеме должен быть не менее 0,5Iвых, практически выбирают (для надежности) диоды с большим прямым током.
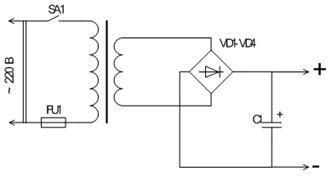
Рис. 5.2.5. Выпрямитель, выполненный по мостовой схеме
Допустимое обратное напряжение не должно быть меньше 0,71UII, + 0,5Uвых, но поскольку на холостом ходу Uвых достигает 1,41UII, обратное напряжение диодов целесообразно выбирать не меньше этой величины, т. е. амплитудного значения напряжения на вторичной обмотке. Полезно учесть еще и возможные колебания напряжения сети.
Амплитуду пульсаций выпрямленного напряжения в вольтах можно оценить по упрощенной формуле: Uпульс = 5 Iвых/С- выходной ток подставляется в амперах, емкость конденсатора С1 — в микрофарадах.[5,7]
5.3 Расчет стабилизатора
Среди полупроводниковых стабилизаторов напряжения существует две основные группы - параметрические стабилизаторы и компенсационные.
Наиболее просты параметрические стабилизаторы. Их принцип действия основан на использовании особых диодов - стабилитронов, или других каких-то полупроводниковых элементов, которые имеют такую вольт-амперную характеристику (ВАХ), что при пропускании через них тока или прикладыванию к ним напряжения на этих элементах поддерживается определенное стабильное напряжение падения. Поэтому такие стабилизаторы и называются параметрическими, - потому что их работа зависит от определенного параметра стабилитрона или другого элемента.
Яркий пример - стабилитрон. Это диод, имеющий ВАХ показанную на рис. 5.3.1. Как видно, в отличие от обычного диода ВАХ стабилитрона имеет отрицательную ветвь, характеризующую резкое нарастание обратного тока при достижении обратным напряжением
Фактически, это обратимый пробой диода, не взывающий повреждения кристалла (но только в том случае, если не будет превышен максимально допустимый обратный ток).
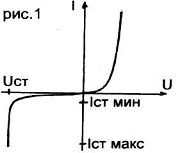
Рис. 5.3.1. ВАХ стабилитрона определенного значения (напряжения стабилизации).
Кроме напряжения стабилизации (Ucт) при котором наступает обратимый пробой стабилитрона, есть еще два параметра - Iст(мин) -минимальный обратный ток, при котором возникает устойчивый пробой и Uст(макс) -максимальный обратный ток, при превышении которого происходит повреждение стабилитрона. Таким образом, имеется рабочий стабильный участок обратного тока от Iст(мин) до Iст(макс), в пределах которого изменение обратного тока через стабилитрон не приводит к изменению на падающего на нем напряжения.
Согласно закону Ома изменяется сопротивление стабилитрона: Сила тока возрастает, а сопротивление уменьшается на столько, чтобы напряжение на стабилитроне оставалось на уровне напряжения стабилизации.
Простейший параметрический стабилизатор можно собрать по схеме, показанной на рис. 5.3.2. Сопротивление стабилитрона VD1 и резистора R1 образуют делитель напряжение, a R1, кроме того, ограничивает и ток через стабилитрон. Если входное напряжение (Uвx) ниже Uст (напряжения стабилизации стабилитрона) сопротивление VD1 очень велико (как у любого диода, включенного в обратном направлении) и он не влияет на выходное напряжение. Если Uвx превышает Ucт возникает обратимый пробой стабилитрона и его обратное сопротивление изменяется так, что напряжение на VD1 остается стабильным и равным Ucт при значительном изменении входного напряжения (при условии, что Uвx всегда больше чем Ucт).
На рисунке 5.3.4. показана одна из возможных схем сетевого источника с таким стабилизатором. Недостатком
Рис. 5.3.4. данной схемы является то, что из-за резистора R1 стабилизатор имеет значительное выходное сопротивление и, как следствие, очень небольшой выходной ток, который обязательно должен быть значительно меньше тока, протекающего через стабилитрон. Дело в том, что если ток через нагрузку будет высок, то сопротивление нагрузки просто зашунтирует стабилитрон и совместно с резистором R1 образует делитель напряжения, на параметры которого стабилитрон будет оказывать лишь минимальное влияние.
Устранить недостаток большого выходного сопротивления можно, если дополнить схему простым усилителем тока на транзисторе (рис. 5.3.5). Транзистор включен по схеме эмиттерного повторителя, а это значит, что напряжение на его эмиттере будет равно напряжению на его базе. На базу транзистора подаем напряжение со стабилитрона, а нагрузку подключаем в его эмиттерную цепь. Теперь, ток нагрузки уже не сможет оказывать существенного влияния на напряжение на стабилитроне. Нагрузка может быть достаточно мощной (зависит от мощности транзистора и его коэф-
Рис. 5.3.5. фициента усиления по току). Теперь напряжение на нагрузку подается с другого делителя, состоящего из сопротивления эмиттер-коллектор транзистора и сопротивления самой нагрузки. Ток в нагрузке увеличивается, - сопротивление Э-К VT1 уменьшается, так чтобы напряжение на нагрузке осталось таким же, как напряжение на стабилитроне.
Следуя этой схеме можно очень просто сделать регулируемый стабилизатор (рис.5.3.6).
Просто напряжение на базу транзистора подается не прямо со стабилитрона а через потенциометр R2. Поворачивая вал переменного резистора R2 можно
Рис. 5.3.6. изменять напряжение на базе транзистора. Соответственно будет изменяться напряжение и на его эмиттере. Для того, чтобы получить лучшую стабильность выходного напряжения и его меньшую зависимость от выходного тока нужно повысить коэффициент усиления по току транзисторного усилителя тока. Это можно сделать применив схему усилителя на двух транзисторах, включенных по схеме составного транзистора.
Расчет стабилизатора, показанного на рис 5.3.6., необходимо начинать с выбора транзистора VT1 и стабилитрона VD1, исходя из требуемого напряжения и тока нагрузки. Ток базы транзистора составит: Iб = Iвых / h21Э, где h21Э — статический коэффициент передачи тока базы транзистора в схеме с общим эмиттером. Затем оценивается минимальное напряжение на выходе выпрямителя Uвых – Uпульс – оно должно быть на 2...3 В больше требуемого напряжения на нагрузке даже при минимально допустимом напряжении сети. [6,7]
Список литературы
1. Микроконтроллеры PIC16F84. Документация // материал сайта: http://pic16f84.narod.ru/index.htm
2. А. Шарыпов, Экономичный многофункциональный частотомер,//журнал «Радио», 2002, №10, с.26.
3. Н.Большаков, Audio техника // материал сайта: http://radio-fanat.ru
4. В.В.Алексеев, Сетевые источники питания, //журнал «Радио-конструктор», 2004 , №4, с.42
5. В.В.Алексеев, Сетевые источники питания. Расчет выпрямителя, //журнал «Радио-конструктор», 2004 , №5, с.44
6. В.В.Алексеев, Сетевые источники питания. Расчет стабилизатора, //журнал «Радио-конструктор», 2004 , №6,8, с.42
7. В. Поляков, Расчет блоков питания, //журнал «Радио», 2003, №5, с.51.