| Скачать .docx |
Реферат: Расчет переходных процессов в дискретных системах управления
Предмет:
"Теория автоматического управления"
Тема:
"Расчет переходных процессов в дискретных системах управления"
Рассмотрим схему дискретной системы автоматического управления, приведенную на рис. 1.
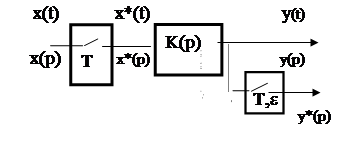 |
Рис. 1
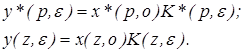
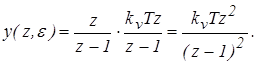
Для выхода системы можно записать следующие соотношения между входным и выходным сигналом
 (1)
(1)
Выражение для выходной величины во временной форме имеет вид
 (2)
(2)
Определим переходную функцию дискретной системы. Дискретное преобразование единичного воздействия x(t) = 1 (t) равно x(z) = z/(z-1).
Переходную функцию определим из соотношений
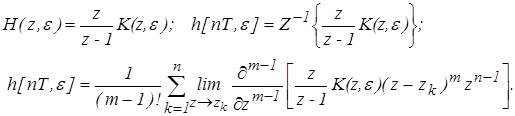 (3)
(3)
Получили выражение для расчета переходной функции дискретной системы.
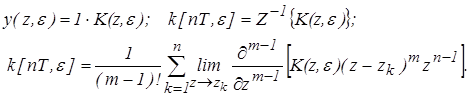
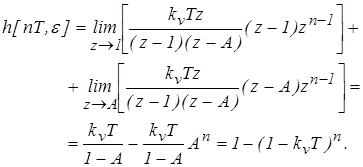
Определим функцию веса дискретной системы. Дискретное изображение единичного импульса x(t) = d (t) равно x(z) = 1 .
Весовую функцию определим из соотношений
 (4)
(4)
Получили выражение для расчета функции веса дискретной системы.
Установившееся значение временных характеристик можно определить с помощью теоремы о конечном значении дискретной функции.
Для переходной функции
![]() . (5)
. (5)
Для весовой функции
![]() (6)
(6)
Определим связь между переходной функцией и функцией веса дискретной системы. Для области z можно записать следующие соотношения
![]()
Откуда
![]() (7)
(7)
Как следует из выражения (7) функция веса в каждый дискретный момент времени может быть определена как разность между текущим и предыдущим значением переходной функции
Пример 1. Для заданной системы (рис. 2.) рассчитать переходный процесс, если x(t) = 1 (t).
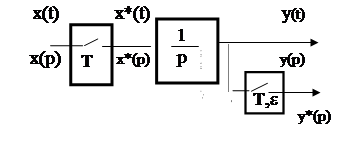 |
Рис. 2
Решение
Выходной дискретный сигнал равен: ![]()
При этом

Если x(t) = 1 (t)
то 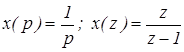 . Для
. Для 
![]()
Подставим x(z) и K (z, e ) в выражение для выходного дискретного сигнала
Определим значения полюсов – zk их число – n и кратность – m: z1 = 1; n = 1; m = 2.
Выражение для переходного процесса имеет вид:

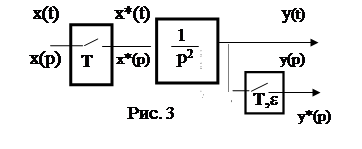
Пример 2. Рассчитать переходный процесс в заданной дискретной системе (рис. 3.), если x(t) = 1 (t).
 |
Решение:
Выходной дискретный сигнал равен: ![]()
При этом
 .
.
Если x(t) = 1 (t)
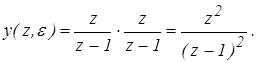
, то .
Для 
Подставим x(z) и K (z, e ) в выражение для выходного дискретного сигнала
Выражение для переходного процесса имеет вид:
Пример 3. Рассчитать переходный процесс в заданной дискретной системе (рис. 4), если x(t) = 1 (t).
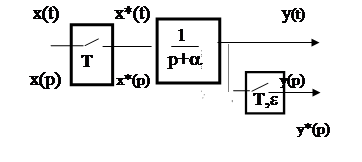 |
Рис. 4
Решение:
Выходной дискретный сигнал равен: ![]()
При этом
Если x(t) = 1 (t)
, то .
Если  , то
, то  , где
, где![]()
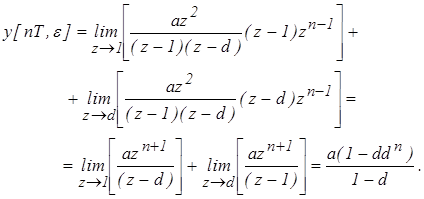
Подставим x(z) и K (z, e ) в выражение для выходного дискретного сигнала
Определим значения полюсов – zk их число – n и кратность – m:
z1 = 1; z2 = d ; n = 2; m = 1.
Выражение для переходного процесса имеет вид:
Пример 4. Рассчитать переходный процесс в заданной дискретной системе (рис. 5), если x(t) = 1 (t) .
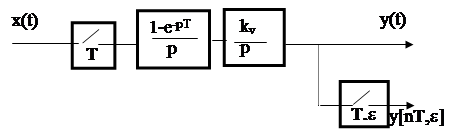 |
Рис. 5
Решение:
Выходной дискретный сигнал равен: ![]()
При этом
Если x(t) = 1 (t)
, то .
Передаточная функция соединения равна:

Дискретная передаточная функция соединения равна:

Подставим x(z) и K (z, e ) в выражение для выходного дискретного сигнала
Определим значения полюсов – zk их число – n и кратность – m: z1 = 1; n = 1; m = 2.
Выражение для переходного процесса имеет вид:
Пример 5. Рассчитать переходный процесс в заданной дискретной системе (рис. 6), если x(t) = 1 (t) .
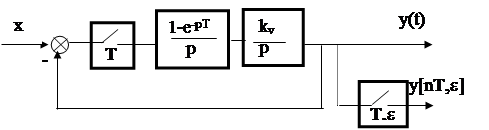 |
Рис. 6
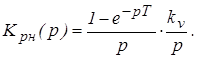
Решение:
Определим передаточную функцию разомкнутой непрерывной части:
Выполним дискретное преобразование:

Передаточная функция замкнутой дискретной системы:
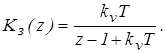
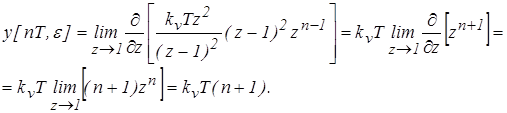
Подставим x(z) и Kз (z, e ) в выражение для выходного дискретного сигнала
Определим значения полюсов – zk их число – n и кратность – m:
z1 = 1, z2 = 1 – kv T = A, n = 2, m = 1 .
Выражение для переходной функции имеет вид:
Пример. Для заданной системы (рис. 7) рассчитать переходный процесс, если x(t) = 1 (t) , а алгоритм функционирования цифровой части описывается уравнением:
 X Y
X Y
Рис. 7
Решение: Исходную схему можно представить в виде (рис. 8)
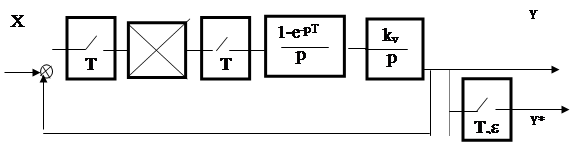 |
Рис. 8
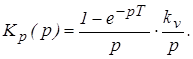
Определим передаточную функцию разомкнутой непрерывной части
Выполним дискретное преобразование

Определим передаточную функцию цифрового автомата, в соответствии с алгоритмом его функционирования
![]()
Определим передаточную функцию разомкнутой дискретной системы:
![]()
Передаточная функция замкнутой дискретной системы:
![]()
где s 1 , s 2 корни характеристического уравнения
![]()
приэтомs1 + s2 = 1+a+kv T; s1 s2 = a.
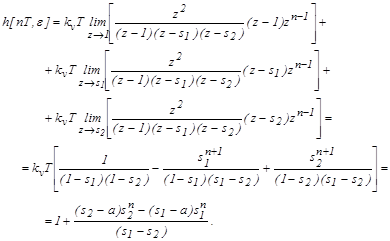
Подставим x(z) и Kз (z, e ) в выражение для выходного дискретного сигнала
![]()
Определим значения полюсов – zk их число – n и кратность – m
z1 =1, z2 =s1 , z3 =s2 , n=2, m=1.
Выражение для переходной функции имеет вид:
Литература
1. Бронштейн И.Н., Семендяев К.Н. Справочник по математике для инженеров и учащихся вузов. – М.: Наука, 1989
2. Васильев В.И., Ильясов Б.Г. Интеллектуальные системы управления: Теория и практика: Учеб. пособие для вузов. Издательство: Радиотехника, 2009. – 392 с.
3. Голенцев Э., Клименко С.В. Информационное обеспечение систем управления. ФЕНИКС, 2002. – 350 с.
4. Долятовская В.Н., Долятовский В.А. Исследование систем управления, 2004. – 255 с.