| Скачать .docx |
Курсовая работа: Система управления скоростью
Содержание
Введение
1. Определение параметров объекта управления
2. Разработка алгоритма управления и расчёт параметров устройств управления
3. Моделирование процессов управления, определение и оценка показателей качества
4. Разработка принципиальной электрической схемы и выбор элементов
5. Список литературы
Введение
Электропривод постоянного тока стал широко распространён из-за достаточно простых способов регулирования, так как у него можно менять токовую и потоковую составляющие момента независимо друг от друга, а с появлением ШИМ напряжения, ЭП ПТ стал ещё более экономичным и стал осуществлять лучшие динамические и точностные показатели регулирования.
В последние годы ЭП постоянного тока стал вытесняться приводом на асинхронных двигателях как на более дешевом и надёжном, но простой алгоритм управления и большая распространённость ещё делают привод постоянного тока достаточно широко применяемым.
В данной курсовой работе рассматривается система управления скоростью ДПТ в диапазоне от 0.05wНОМ до 5wНОМ . Таким образом, управление двигателем будет происходить в двух зонах. Причём и в первой и во второй зонах диапазон регулирования достаточно большой. При двузонном управлении двигателем в большом диапазоне будет достаточно сложным а при условии максимального быстродействия можно предположить, что в ходе разработки придется применять не только тривиальные схемы.
1. Определение параметров объекта управления.
В качестве объекта управления выступает двигатель постоянного тока 4ПФ180М с реверсивным ШИП в цепи якоря и ШИР тока возбуждения с частотой коммутации 5кГц. Параметры двигателя приведены в табл. 1.
Таблица 1
| Мощ-ность, кВт | Напряжение якоря, В | Напряжение возбуждения, В | Номинальный момент, Нм | Ток якоря, А |
| 20 | 220 | 220 | 402.3 | 114,5 |
| КПД, % | Номинальная частота, об/мин | Максимальная частота, об/мин | Момент инерции, кг*м2 | Класс нагревостойкости |
| 75 | 475 | 3800 | 0,578 | F |
Двигатель типа 4ПФ предназначен для привода механизма главного движения станков с ЧПУ, гибких производственных систем и роботизированных производственных комплексов. Двигатель поставляется со встроенными тахогенераторами типа ТП80-20-0,2 и датчиками тепловой защиты – терморезистором типа СТ 14-1Б. Двигатель выдерживает нагрузку по току при номинальной частоте вращения ![]() в течении
в течении ![]() и
и ![]() в течении
в течении ![]() ; при максимальной частоте вращения –
; при максимальной частоте вращения – ![]() в течении
в течении ![]() . [1, стр.360]
. [1, стр.360]
Суммарный момент инерции, приведённый к валу двигателя:
![]() кг×м2
кг×м2
Постоянная двигателя
![]()
Сопротивление якорной обмотки:
![]()
Индуктивность обмотки якоря составляет 9.2 мГн, рассчитаем электромагнитную постоянную времени:
![]()
Сопротивление обмотки возбуждения 33.4 Ом, индуктивность составляет 2.75 Гн. Пользуясь этими данными рассчитаем электромагнитную постоянную времени обмотки возбуждения:
![]()
Жёсткость электромеханической характеристики равна:
![]()
Определим электромеханическую постоянную времени:
![]()
Электромагнитная и электромеханическая постоянные времени отличаются всего в 1.5 раза, следовательно при синтезировании системы управления и моделировании двигателя влиянием ЭДС обмотки якоря пренебрегать нельзя.
По заданию нагрузка является активным моментом сопротивления и равна 0.2Мн.
![]()
2. Разработка алгоритма управления и расчёт параметров устройств управления
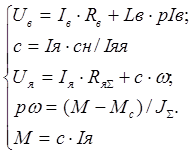
Объект управления описывается следующими уравнениями [3, стр.38-39]:
Для реализации поставленной задачи настроим оба контура тока на технический оптимум и предусмотрим форсировку в этих контурах. Для получения максимального быстродействия при настройке контура скорости будем использовать адаптивный регулятор скорости а сигналом адаптации будет служить масштабированный сигнал с датчика тока возбуждения. Для получения астатизма по нагрузке создатим второй контур скорости.
Настройка контура тока ротора.
Передаточная функция объекта управления:
![]()
Так как период дискретизации преобразователя равен 0.0002 с, что в 115 раз меньше чем Тэ, то дискретностью преобразователя в расчётах можно пренебречь.
Примем ![]() , Кп=22, Кот=0.087 Ом
, Кп=22, Кот=0.087 Ом

Регулятор тока якоря получается в виде последовательно соединённых ПИ регулятора и ФНЧ.
Настроим контур скорости на технический оптимум:
![]()
Передаточная функция регулятора при учёте Кос=0.04 Вс/рад получается:

Получился адаптивный П регулятор скорости. Значение с будем опрелять исходя из линейной зависимости с и Iв.
Настроим второй контур скорости на технический оптимум для получения астатизма по нагрузке.
![]()

Получился интегральный регулятор скорости.
Настроим контур тока возбуждения на технический оптимум:
![]()
Тогда
Примем ![]() , Котв=1.51 Ом
, Котв=1.51 Ом

Регулятор тока обмотки возбуждения получается в виде последовательно соединённых ПИ регулятора и ФНЧ.
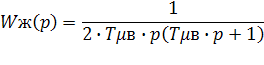
Для получения сигнала задания тока возбуждения будем использовать нелинейное звено характеристика которого показана ни рис. 1. На вход нелинейного звена будем подавать сигнал с датчика напряжения.
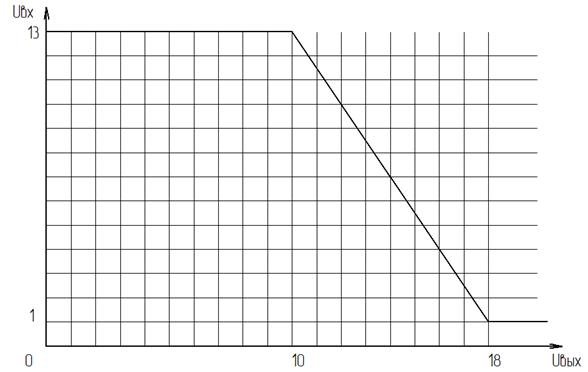
Рис. 1 Характеристика нелинейного звена.
Для снижения колебательности вызванной более медленным контуром тока возбуждения на вход системы поставим задатчик интенсивности.
Компенсацию ЭДС выполним с помощью добавления к сигналу управления преобразователем сигнала:
![]()
Подытожив всё вышеперечисленное получаем следующую структурную схему.
3. Моделирование процессов управления, определение и оценка показателей качества
Для моделирования переходных процессов системы управления электроприводом постоянного тока воспользуемся средой Simulink программного комплекса MatLab.
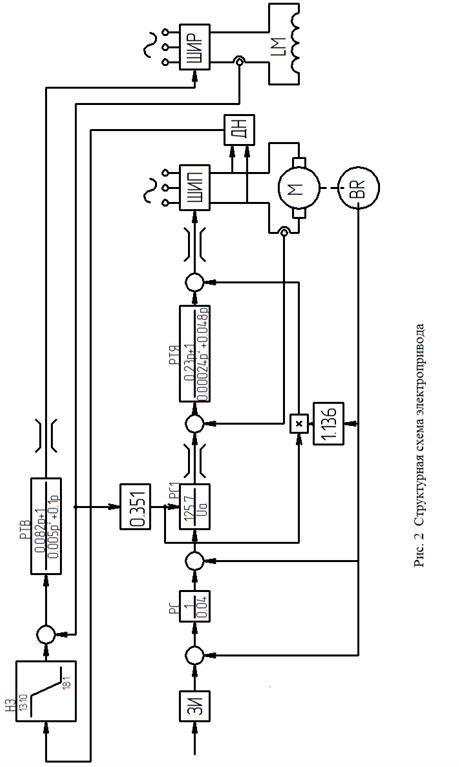
Схема собранная в комплексе MatLab выглядит следующим образом:
Рис. 3. Схема СУЭП для комплекса MatLab.
Отдельно отметим задатчик интенсивности. В нашей системе он является двупороговым, т.е. до напряжения 4.8 В скорость нарастания сигнала составляет 26 В/с, при переходе за напряжение 4.8 В скорость снижается до 6 В/с. Применение такого устройства обуславливается большой колебательностью возникающей из-за более медленного контура возбуждения.
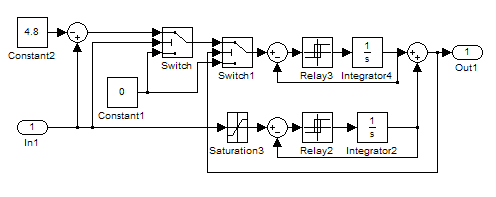
Рис. 4. Схема задатчика интенсивности для комплекса MatLab
В ходе моделирования некоторые параметры быле немного скорректированны.
Результаты моделирования при изменении задания на скорость от нуля до величины 0.5 В выглядят следующим образом.
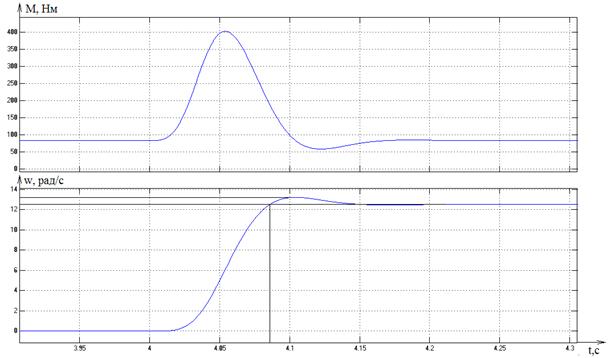
Рис. 5 Зависимость скорости и момента от времени.

Рис. 6 Зависимость напряжения на якоре и потока от времени
Видно что параметры переходного процесса удовлетворяют условиям задания и почти соответствуют парметрам технически оптимального процесса.
При изменении задания в верхних пределах диапазона скорости, т.е. от 9.5 до 10 В графики переходных процессов выглядят следующим образом:
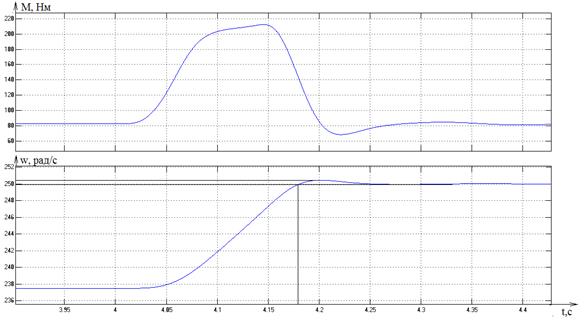
Рис. 7 Зависимость скорости и момента от времени
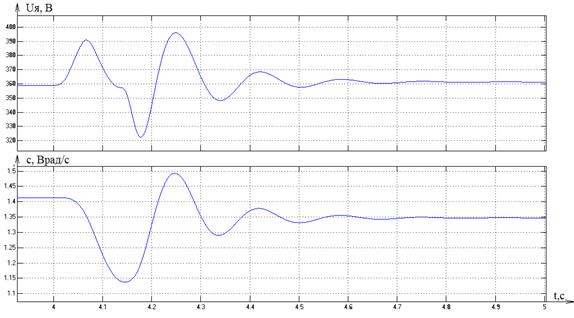
Рис. 8 Зависимость напряжения на якоре и потока от времени
Из графиков видно что хотя напряжение на якоре и ток статора достаточно сильно колеблются, эти колебания взаимно компенсируют друг друга и колебания момента, а следовательно и скорости малы.
Проведём моделирование при изменении задания на скорость от нуля до максимального значения. При этом получаем следующие графики.
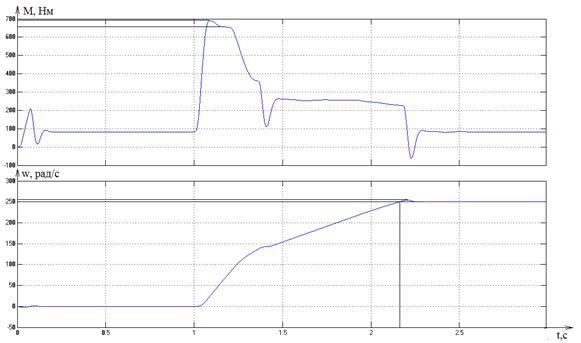
Рис. 9 Зависимость скорости и момента от времени
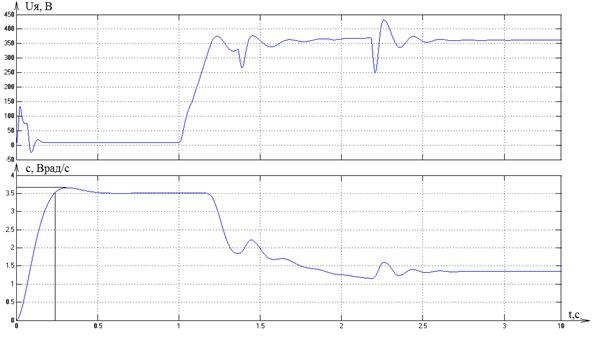
Рис. 10 Зависимость напряжения на якоре и потока от времени
На графиках чётко видно как изменяется ускорение двигателя при переходе скорости выше 120 рад/с. Так же видно как работает ограничение моента и как оно снижается при снижении потока, т.к. ограничение тока остаётся постоянным, а при уменьшении потока максимальный момент снижается.
Моделирование системы показало, что показатели качества регулирования соответствуют заданию. А именно перерегулирование не превышает 5%, а статическая ошибка равна нулю, так как система настроена с астатизмом по нагрузке.
4. Разработка принципиальной электрической схемы и выбор элементов
4.1 Реализация контура тока якоря
Регулятор тока якоря представляет из себя последовательное соединение интегратора и фильтра низких частот с Ти=0.048, К=0.48 и Тф=0.005. Выбираем R35, R36, R38, R41, R50 равным 10 кОм. R44=R36/K=20.83 кОм, C79=Ти/R36=4.8 мкФ, С75=Тф/R50=0.5 мкФ.
В качестве операционных усилителей выберем К140УД17А.
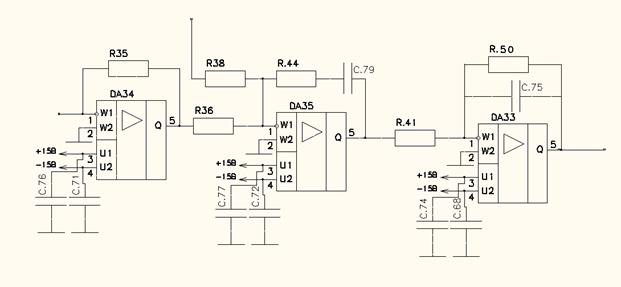
Рис. 11 Регулятор тока якоря. Схема принципиальная электрическая
Для уменьшения помех от линий питания поставим на входе питающих проводников конденсаторы по 0.1 мкФ
Для реализации этой схемы нам понадобятся:
R35, R36, R38, R41, R50 C2-23-0.125-10кОм ±1%
R44 C2-23-0.125-20кОм ±1%
C79 K10-17Б-X7R-4.7мкФ ±10%
C75 K73-17Б-X7R -0.47мкФ ±10%
C71, C72, C76, C77, C74, C68 K73-17Б-X7R-0.1мкФ ±10%
4.2 Реализация контура тока возбуждения
Регулятор тока возбуждения структурно схож с регулятором тока якоря. При этом Ти=0.082, К=12.2 и Тф=0.005. Выбираем R39, R40, R38, R37, R42, R49 равным 50 кОм. R41=R39/K=4.1 кОм, C72=Ти/R39=1.64 мкФ, С89=Тф/R49=0.1 мкФ.
В качестве операционных усилителей выберем К140УД17А.
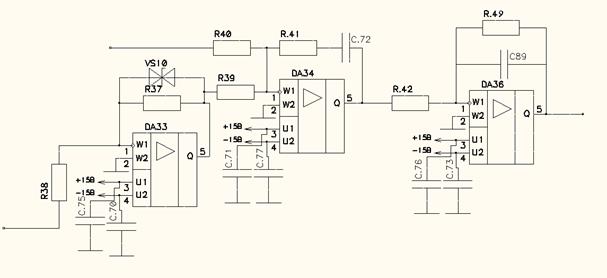
Рис. 12 Регулятор тока обмотки возбуждения. Схема принципиальная электрическая
Для уменьшения помех от линий питания поставим на входе питающих проводников конденсаторы по 0.1 мкФ
Для реализации этой схемы нам понадобятся:
R39, R40, R38, R37, R42, R49 C2-23-0.125-10кОм ±1%
R41 C2-23-0.125-4.3кОм ±1%
C72 K10-17Б-X7R -1.5мкФ ±5%
С75, C70, C71, C75, C73, C77, C68 K10-17Б-X7R-0.1мкФ ±5%
4.3 Реализация первого контура скорости
Первый регулятор скорости должен быть адаптивным, т.е. менять свой коэффициент усиления в зависимости от сигнала настройки.
Ку=127.5 из этого следует что R36/R35=127.5, принимаем R36=100 кОм, R37=100/127.5=0.78 кОм.
В качестве операционного усилителя выбираем микросхему ОРА277, а в качестве аналогового перемножителя микросхему 525ПС3.
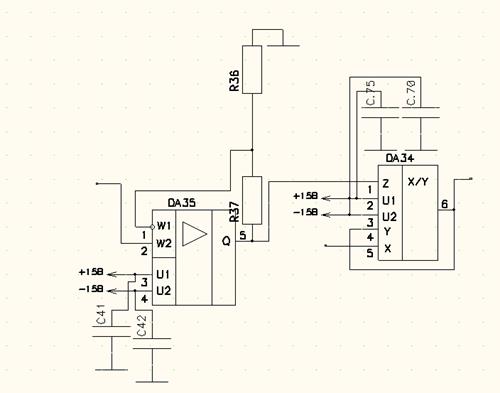
Рис. 13 Регулятор скорости адаптивный. Схема принципиальная электрическая
Для реализации нам понадобится:
R36 C2-23-0.125-100кОм ±1%
R37 C2-23-0.125-820Ом ±1%
4.4 Реализация сигнала обратной связи по скорости
В качестве дтчика обратной связи по скорости будем использовать GT3.10/405 фирмы Hunber. Датчик питается от напряжения +-15 В, максимальная скорость 6000 об/мин, с коэффициентом передачи 0.02 рад/сВ. Нам необходимо увеличить коэффициент передачи в два раза. Примем R35=20 кОм, R36=20/2=10 кОм.

Рис. 14 Усилитель инвертирующий. Схема принципиальная электрическая
Для реализации нам понадобится:
R35 C2-23-0.125-20кОм ±1%
R36 C2-23-0.125-10кОм ±1%
DA33 ОРА277
4.5 Реализация второго контура скорости
Второй регулятор скорости представляет собой интегратор. Принципиальная схема интегратора изображена на рис. 15

Рис. 15 Регулятор скорости. Схема принципиальная электрическая
Выбираем R37, R38=100 кОм. Ти=0.04 с, тогда С44=Ти/100кОм=0.4 мкФ. В качестве сигнала обратной связи воспользуемся отмасштабированным сигналом с датчика скорости.
Нам понадобитья:
R37, R38 C2-23-0.125-100кОм ±1%
C44 K10-17Б-X7R -0.47мкФ ±10%
DA33 OPA277
4.6 Реализация компенсации ЭДС
Для компенсации ЭДС нам необходимо два сигнала отмасштабировать, затем перемножить их и добавить к сигналу с выхода регулятора тока якоря.
К1=3.51, К2=1.136. Выбираем R36, R37 по 10 кОм, тогда R41= R37/(К1-1) =4 кОм, R35= R36/(К2-1) =73.5 кОм. Операционные усилители выбираем типа К140УД17А, перемножитель типа 525ПС3.
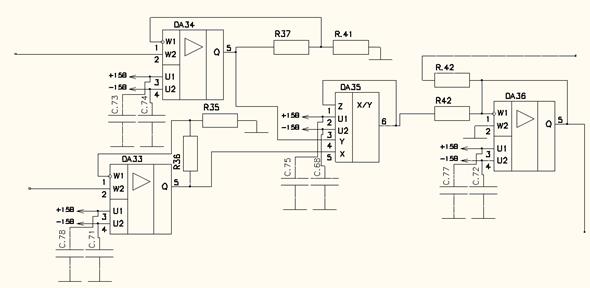
Рис. 16 Устройство компенсации ЭДС. Схема принципиальная электрическая
Нам понадобиться:
R36, R37, R42, R43 C2-23-0.125-10кОм ±5%
R41 C2-23-0.125-4.3кОм ±5%
R35 C2-23-0.125-75кОм ±5%
4.7 Реализация нелинейного звена
Реализацию нелинейного звена осуществим следующим образом:
Проинвертируем напряжение задания скорости с коэффициентом усиления равном 1.78, затем ограничим выходное напряжение на выходе на уровне 13 В, и с помощью устройства выбора минимума или максима сравнивая напряжение с 1 В выберем максимальное.
Примем R40, R42, R38, R35, R36, R37, R39 , R17 равным 10 кОм, тогда R18= R40/1.78=5.61 кОм. В качестве Стабилитрона выберем BZX55C13, а в качестве диодов КД102А. R16= R17(15-1)=140 кОм
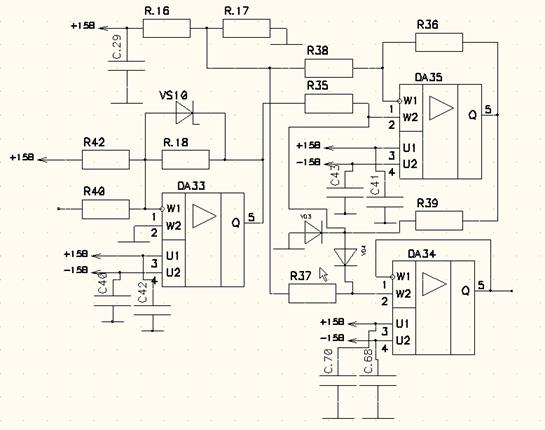
Рис. 17 Звено нелинейное. Схема принципиальная электрическая
Нам понадобиться:
R40, R42, R38, R35, R36, R37, R39 , R17 C2-23-0.125-10кОм ±5%
R18 C2-23-0.125-5.6кОм ±5%
R16 C2-23-0.125-15кОм ±5%
4.1 Реализация задатчика интенсивности
Основой данного устройства будут два интегратора с Ти1=0.167 с, и Ти2=0.05 с. Примем R37=100 кОм, тогда С59=Ти1/ R37=1.7 мкФ. Примем R40=100 кОм, тогда С51=Ти2/ R40=0.5 мкФ. На вход VL ключей DA36 и DA33 надо подать 4.7 В. Примем R36=10 кОм, тогда R3=24 кОм. В качестве ключей DA36 и DA33 выбираем DG419, в качестве операционных усилителей возьмём ОРА277, а в качестве компараторов возьмём AD8561AN.
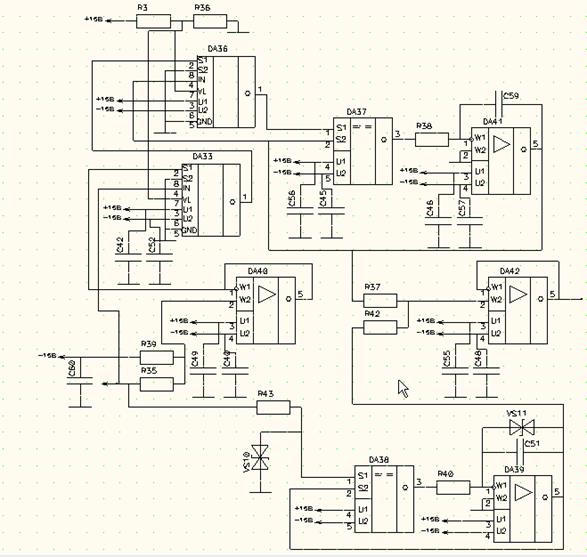
Рис. 18 Задатчик интенсивности. Схема принципиальная электрическая
R36, R37, R39, R35, R42 C2-23-0.125-10кОм ±1%
R38, R40 C2-23-0.125-100кОм ±1%
R3 C2-23-0.125-24кОм ±1%
C51, С59 K10-17Б-X7R-0.47мкФ ±10%
На входы питания всех микросхем подключим конденсаторы по 0.1 мкФ, Предусмотрим возможность разряда конденсаторов всех интеграторов с помощью ключей 590КН7. Ограничим выходные сигналы с регуляторов с помощью сдвоенных стабилитронов BZX55C12 в контурах скорости и 1N4747A в контуре тока якоря.
5. Список литературы.
1. Справочник по электрическим машинам: В 2 т./ Под общ. Ред. И.П. Копылова и Б.К. Клокова. Т. 1. – М.: Энегроатомиздат, 1988, - 456 с.
2. Заборщикова, А. В., «Двигатели постоянного тока для автоматизированного электропривода»: Учебное пособие. Заборщикова, А.В., Мельников В.И. – СПб: Петербургский гос. ун-т путей сообщ., 1994. – 84 с.
3. Башарин, А.В., «Управление электроприводами» : Учебное пособие для вузов. Башарин, А.В., Новиков В.А., Соколовский Г.Г – Л.: Энергоатомиздат. Ленингр. Отд-ние, 1982. – 392 с., ил.
4. Ключев, В.И. «Теория электропривода»: Учеб. Для вузов. – 2-е изд. Перераб. И доп. – М.: Энегроатомиздат, 2001. – 704 с.: ил
5. Елисеев, В.А. «Справочник по автоматизированному электроприводу» Елисеев В.А., Шинянский А.В.М.1983.
6. Александров, К. К. «Электротехнические чертежи и схемы» Александров К. К., Кузьмина Е.Г. – М.: Энергоатомиздат, 1990.-288с.
7. Герман-Галкин, С.Г. «Компьютерное моделирование полупроводниковых систем в MatLAB6.0».Учебное пособие. - СПб.:КОРОНА принт 2001г. – 320с.
8. Титце, У. Полупроводниковая схемотехника: Справочное руководство. Титце У., Шенк К., – М.:Мир 1982 – 512с.