| Скачать .docx |
Курсовая работа: Разработка функционального устройства
МОСКОВКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
(государственный технический университет)
Кафедра 403
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по дисциплине
«Вычислительные системы и микропроцессорная техника»
Выполнил
студент группы 04-512
Гуреев И.А.
Консультировал
Мальшаков Г.В.
2010 г.
ОГЛАВЛЕНИЕ
1. Уточнение задания …………………………………………………………3
2. Разработка схемы алгоритма и составление операционного описания….5
3. Построение функциональной схемы операционного автомата…………..7
4. Управляющий автомат с жесткой логикой………………………………....8
5. Управляющий автомат с программируемой логикой……………………..12
6. Функциональная схема автомата с программируемой логикой………….15
7. Построение принципиальной схемы……………………………………….16
8. Временные диаграммы………………………………………………………17
9. Список литературы…………………………………………………………..18
ЗАДАНИЕ
По шинам А{1:8} и В на вход устройства поступает 16-ти разрядный код по байтам (первый байт по шине А параллельно, второй по шине В последовательно). Определить число комбинаций 11011 в пришедшем коде, результат выдав по отдельной шине С.
УТОЧНЕНИЕ ЗАДАНИЯ
1. Примем, что источник входного кода гарантирует правильность выставленной информации во время действия стробирующего импульса СТРОБ, а само устройство подтверждает выдачу кода числа единичных символов генерацией импульса считывания УСЧИТ.
Выберем тактовую синхронизирующую последовательность импульсов. Пусть в разрабатываемом устройстве она будет общей для источника, устройства преобразования и потребителя информации (внешняя синхронизация). Пусть частота ГТИ равна 5 МГц.
Будем считать, что смена кодов А, В и С осуществляется по положительному фронту импульсов ГТИ, длительность импульсов СТРОБ и УСЧИТ равна длительности импульсов тактовой последовательности, а положительные фронты этих импульсов появляются вслед за положительным фронтом импульсов ГТИ.
2. Определим разрядность выходного кода. Максимальное число возможных последовательностей 11011 в 16-ти разрядном коде равно 11, следовательно, оно потребует формирования на выходной шине 4-х разрядного кода.
3. Входные данные, приходящие по шинам A {1:8} и B , сопровождаются управляющими сигналами СТРОБ (передний фронт сигнала СТРОБ совпадает с установившимся сигналом на шинах A и B ).
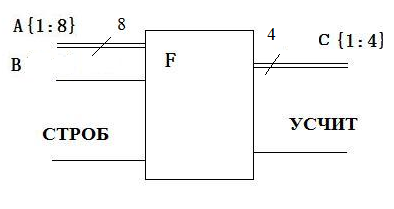
Выходные данные C {1:4} формируемые устройством сопровождаются управляющим сигналом УСЧИТ (передний фронт сигнала УСЧИТ совпадает с установившимся сигналом на шине C ), что бы последующие устройства знали, в какой момент времени необходимо считать результат работы нашего устройства. Считывание данных происходит по переднему фронту управляющих сигналов.
Примем, что в разрабатываемом устройстве не требуется введения внутренней индикации, и не будем пока накладывать никаких ограничений на потребляемую устройством мощность и, следовательно, на выбор оптимальной элементной базы.
Временные диаграммы
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ГТИ: t
ГТИ: t
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() СТРОБ:
СТРОБ:
![]() t
t
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Шина А:
Шина А:
![]() t
t
Шина В:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() t
t
![]()
![]()
![]()
![]()
![]()
![]()
![]() Шина С:
Шина С:
![]() t
t
![]() УСЧИТ:
УСЧИТ:
![]() t
t
РАРАБОТКА СХЕМЫ АЛГОРИТМА
И СОСТАВЛЕНИЕ ОПЕРАЦИОННОГО ОПИСАНИЯ
![]()
![]()
![]()
 нет
нет
 |
||
нет
да
нет
да
Микропрограмма 1
Переменные:
входные: А{1:8}, В, строб;
внутренние: РГ1{1:8}, СЧ1{1:4}, СЧ2{1:4};
внешние: УСЧИТ, С{1:4}:=СЧ1{1:4};
Признаки:
Р1:= ù СТРОБ;
Р2:= РГ3{1}&РГ3{2}&ù РГ3{3}&РГ3{4}&РГ3{5}=1;
Р3:=СЧ2{3}&(СЧ2{2}|СЧ2{1}|СЧ2{0});
P4:=СЧ2{1:4}=11;
Процедура:
М1 если Р1, то М1;
УЗП: РГ1{1:8}:=А{1:8};
УН1: СЧ1:=0;
УН2: СЧ2:=0;
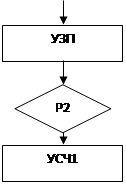
М2 если Р2, то М3;
УСЧ1: СЧ1:=СЧ1+1;
если Р3, то М3;
если Р1, то М3;
М3 если Р4, то М4;
УСДВ: РГ1{1:8}:=РГ1{2:8}.B;
УСЧ2: СЧ2:=СЧ2+1;
идти к М2;
М4 С{1:4}:=СЧ1{1:4},
УСЧИТ;
конец;
после упрощения микропрограмма принимает вид:
Микропрограмма 2
Переменные:
входные: А{1:8}, В, строб;
внутренние: РГ1{1:8}, СЧ1{1:4}, СЧ2{1:4};
внешние: УСЧИТ, С{1:4}:=СЧ1{1:4};
Признаки:
Р1:= ù СТРОБ;
Р2:= РГ3{1}&РГ3{2}&ù РГ3{3}&РГ3{4}&РГ3{5}=1;
Р3:=СЧ2{3}&(СЧ2{2}|СЧ2{1}|СЧ2{0});
P4:=СЧ2{1:4}=11;
Процедура:
М1 если Р1, то М1;
УЗП: РГ1{1:8}:=А{1:8}, СЧ1:=0, СЧ2:=0;
М2 если Р2, то М3;
УСЧ1: СЧ1:=СЧ1+1;
если Р3, то М3;
если Р1, то М3;
М3 если Р4, то М4;
УСДВ: РГ1{1:8}:=РГ1{2:8}.B, СЧ2:=СЧ2+1;
идти к М2;
М4 С{1:4}:=СЧ1{1:4},
УСЧИТ;
конец;
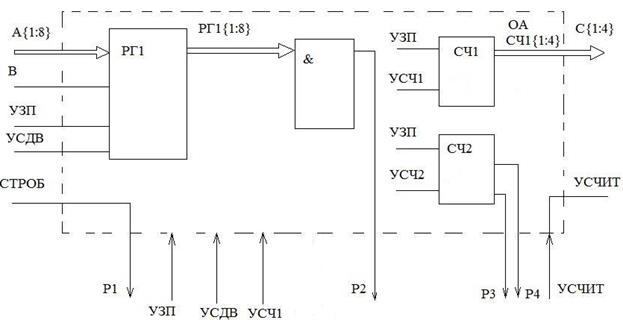
Функциональная схема операционного автомата
Управляющий автомат с жесткой логикой
УА с жесткой логикой будем строить в виде классического конечного автомата – Мура или Мили.
![]() Граф-схема для автомата Мура
Граф-схема для автомата Мура
а0
 |
 1
1
 |
а1
 |
![]()
![]() 0
0
![]()
![]()
 а2
а2
![]()
![]()
![]()
![]()
![]()
![]()


![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
1
![]()
|
![]() а4
а4
а3
 а0
а0
![]()
![]()
![]()
![]()
![]() Р2
Р2
![]()
![]() Р1 ùР1 ùР2&Р3&P4+ùР2&ùР3&ùР1&P4
Р1 ùР1 ùР2&Р3&P4+ùР2&ùР3&ùР1&P4
ùР3&ùР1&ùР4 ùР3&ùР1&Р4
 УСДВ&P2
УСДВ&P2
![]()
![]()
![]() ùР2&Р3&P4&УСДВ+ùР2&ùР3&ùР1&P4&УСДВ
ùР2&Р3&P4&УСДВ+ùР2&ùР3&ùР1&P4&УСДВ
УСЧИТ
![]()
![]()
![]()
![]()
![]()
![]() Граф-схема для автомата Мили
Граф-схема для автомата Мили![]()

![]()
![]()
![]()
![]()
![]()
|
|


|
|

![]()
![]()
![]() 1 а0
1 а0
а1
0
1
1
а2
1
![]()
![]()
![]()


 а0
а0
 Р1
Р1
ùР1 &УЗП УСЧИТ&P4
Р2&P3&УСЧ1+ ùР2&P3+P2&ùР3&ùР1&УСЧ1+ùР2&ùР3&ùР1
УСДВ&ùР4
Для реализации выберем автомат Мили, т.к он имеет всего 3 состояния. Будм реализовывать его на D-триггере.
Построим таблицу переходов и выходов автомата Мили
| Вход |
Состояние |
||
|
|
а1 |
а2 |
|
| Р1 |
а0 |
||
| ùР1 |
УЗП |
||
| P2&P3 |
|
a2 УСЧ1 |
|
| ùР2&P3 |
|
a2 |
|
| P2&ùР3&ùР1 |
|
a2 УСЧ1 |
|
| ùP2&ùР3&ùР1 |
|
a2 |
|
| Р4 |
|
a0 УСЧИТ |
|
| ùР4 |
|
a1 УСДВ |
|
 а1
а1 
Построим кодированную таблицу переходов и выходов конечного автомата.
Для этого воспользуемся кодированной таблицей внутренних состояний автомата:
| a(t) |
Q1(t) |
Q2(t) |
| a0 |
0 |
0 |
| a1 |
0 |
1 |
| a2 |
1 |
0 |
Тогда кодированная таблица переходов и выходов принимает вид:
| Вход |
Состояние |
||
|
|
01 |
10 |
|
| Р1 |
00 |
||
| ùР1 |
УЗП |
||
| P2&P3 |
|
10 УСЧ1 |
|
| ùР2&P3 |
|
10 |
|
| P2&ùР3&ùР1 |
|
10 УСЧ1 |
|
| ùP2&ùР3&ùР1 |
|
10 |
|
| Р4 |
|
00 УСЧИТ |
|
| ùР4 |
|
01 УСДВ |
|
 01
01 На основе полученной кодированной таблицы переходов и выходов УА получим функции возбуждения D-триггера и выражения для управляющих сигналов:
D1= P2&P3&ùQ1&Q2+ùР2&P3&ùQ1&Q2+ P2&ùР3&ùР1&ùQ1&Q2+ùP2&ùР3&ùР1&ùQ1&Q2= P3&ùQ1&Q2+ùР3&ùР1&ùQ1&Q2
D2=ùР1&ùQ1&ùQ2+ùР4&Q1&ùQ2
УЗП= ùР1&ùQ1&ùQ2
УСЧ1= P2&P3&ùQ1&Q2+ P2&ùР3&ùР1&ùQ1&Q2
УСЧИТ= Р4&Q1&ùQ2
УСДВ=ùР4&Q1&ùQ2
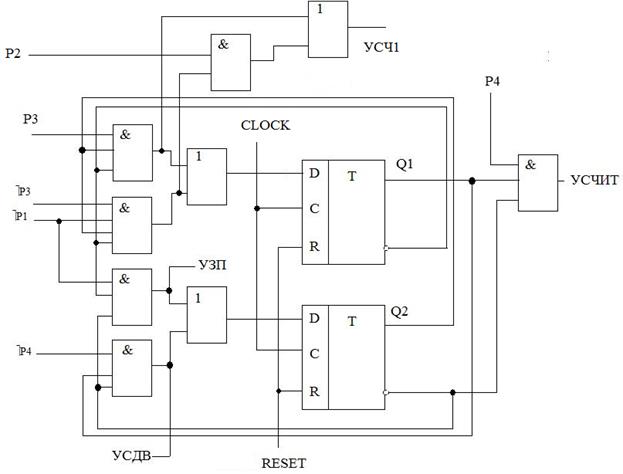
На основе полученных выражений получаем функциональную схему УА, сигнал СБРОС является установочным и формируется при включении питания или от кнопки.
Управляющий автомат с программируемой логикой
Составим каноническую форму микропрограммы синтезируемого операционного устройства (для АУ с естественной адресацией).
| Номер |
Метка |
Управляющие сигналы |
Переход |
| 0 1 2 3 4 5 6 7 8 9 10 |
М1 М2 М3 М4 |
УЗП УСЧ1 УСДВ УСЧИТ |
если Р1, то М1 если Р2, то М3 если Р3, то М3 если Р1, то М3 если Р4, то М4 идти к М2 конец |
Будем считать, что устройство управления решает одну задачу, так что для его построения достаточно иметь ПЗУ, содержащие 10 ячеек. Тогда адрес ячеек ПЗУ будет выражаться четырехразрядным кодом А{3:0}.
Для естественной адресации:
| 0 |
УЗП |
УСЧ1 |
УСДВ |
УСЧИТ |
- |
- |
- |
- |
| 1 |
Р1 |
Р2 |
Р3 |
Р4 |
А3 |
А2 |
А1 |
А0 |
Первый разряд формата микрокоманды УА с естественной адресацией определяет признак микрокоманды (ПРМК): 0 - операционная микрокоманда, 1 - управляющая микрокоманда.
Установим соответствие между метками и адресами переходов: M1=010 =00002 , M2=210 =00102 , M3=610 =01102 , M4=910 =10012
| Адрес |
Разряды микрокоманд |
| 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 |
1 1000 0000 0 1000 0000 1 0100 0110 0 0100 0000 1 0010 0110 1 1000 0110 1 0001 1001 0 0010 0000 1 0000 0010 0 0001 0000 1 0000 0000 |
Для принудительной адресации микрокоманда может одновременно содержать переходы и управляющие сигналы. Тогда для микрокоманды с принудительной адресацией:
| Номер |
Метка |
Управляющие сигналы |
Переход |
| 0 1 2 3 4 5 6 7 |
М1 М2 М3 М4 |
УЗП УСЧ1 УСДВ УСЧИТ |
если Р1, то М1 если Р2, то М3 если Р3, то М3 если Р1, то М3 если Р4, то М4 идти к М2 конец |
Формат микрокоманды:
| УЗП |
УСЧ1 |
УСДВ |
УСЧИТ |
Р1 |
Р2 |
Р3 |
Р4 |
А2 |
А1 |
А0 |
Установим соответствие между метками и адресами переходов: M1=010 =0002 , M2=210 =0102 , M3=510 =1012 , M4=710 =01112
Теперь кодовое выражение микропрограммы УУ, используя каноническое описание и формат микрокоманды, может быть записано в следующем виде:
| Адрес |
Разряды микрокоманд |
| 000 001 010 011 100 101 110 111 |
0000 1000 000 1000 0000 000 0000 0100 101 0100 0010 101 0000 1000 101 0000 0001 111 0010 0000 010 0001 0000 000 |
Сравнивая объем микропрограмм для управляющих автоматов с естественной и принудительной адресацией, мы убеждаемся в том, что принудительная адресация требует меньшего объема ПЗУ (в нашем случае 11 * 8 = 70 бит), чем естественная адресация (9 * 11 = 99 бит). Таким образом, реализация УА с принудительной адресацией в нашем случае более желательна.
Функциональная схема УА с программируемой логикой
![]()
![]()
![]()
![]()
![]() РМК{5:8} 4
РМК{5:8} 4 ![]()
![]()
![]()
![]() P1P2P3P4
P1P2P3P4
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
|
|
|
![]()
10 Р Р
![]() 3
3
![]()
 |
|
сброс Анач
Начальный адрес микропрограммы, равный 000, устанавливается сигналом СБРОС , и УА ждет прихода сигнала СТРОБ для продолжения работы.
Построение принципиальной схемы
Будем строить наше устройство на элементах серии K155 и К555, так как они обеспечивают устойчивую работу на заданной тактовой частоте 5 МГц.
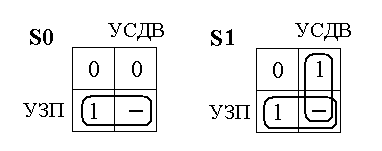
Управляющие сигналы S 0 , S 1 обеспечивают запись кода А в регистр (S 0 = 1, S 1 =1) и сдвиг влево (S 0 = 0, S 1= 1), хранения (S 0 = 0, S 1= 0).
Их получаем из диаграмм Карно. Диаграммы Карно строятся для управляющих сигналов, воздействующих на регистр, в данном случае это сигналы: УЗП , УСДВ .
![]()
![]()
![]()
![]()
![]()
![]()
![]() SE0 = УЗП,
SE0 = УЗП,
SE1 = УЗП + УСДВ = УЗП + УСДВ = УЗП ∙ УСДВ = УЗП / УСДВ
Рассчитаем мощность, потребляемую устройством:
| Элемент |
Задержка |
Потребляемая мощность |
| К155ЛЕ1 |
22нс |
25 мВт |
| К155ЛА1 |
17нс |
20 мВт |
| К155ТМ2 |
30нс |
156.5 мВт |
| К155ИР13 |
40нс |
609 мВт |
| К155ЛЕ4 |
13нс |
37мВт |
| К155ИЕ19 |
70нс |
535мВт |
![]()
Максимальная скорость работы устройства будет определяться временем перехода автомата из состояния а1 в состояние а2, следовательно можно записать:
![]()
Максимальная частота: ![]()
Временные диаграммы
ГТИ ![]()
t
![]() t
t
t
![]()
Список литературы
1. Методические указания к выполнению курсовой работы по дисциплине «Вычислительные устройства и микропроцессорная техника».
2. Конспект лекций по курсу «Вычислительные системы и микропроцессорная техника» А.В. Щеглов.