| Скачать .docx |
Реферат: Лабораторная работа: Построение и расчет статических характеристик электропривода системы генератор-двигатель системы
Министерство образования и Науки Украины
Тема проекта:
«Построение и расчет статических характеристик электропривода системы генератор-двигатель системы Г-Д»
Содержание
1. Исходные данные
2. Описание работы электропривода системы генератор-двигатель
3. Выбор генератора
4. Расчет и построение статических характеристик электропривода
5. Определение динамических параметров для электродвигателя
6. Определение коэффициента форсировки
7. Расчет резисторов в цепи обмотки возбуждения генератора
7.1 Определение сопротивления разрядного резистора R4
7.2 Определение сопротивления резисторов R1, R2, R3
Заключение
Список использованной литературы
1. Исходные данные (вариант №5)
1. Тип электродвигателя Д-32
2. Номинальная мощность Рном 12 к Вт
3. Номинальная скорость nном 770 об/мин.
4. Номинальный ток Iном 65 А
5. Суммарное сопротивление электродвигателя Rя.д. +Rдп.д. 0,28 Оm
6. Число активных проводников Wя.д. 558
7. Число параллельных ветвей якоря 2а 2
8. Число полюсов 2р 4
9. Момент инерции якоря Jд 0,425 кг·м2
10.Коэффициент инерции привода Кj 1,6
11.Коэффициент нагрузки привода Кз 1
2. Описание работы электропривода системы генератор-двигатель
Схема управления силовой частью системы Г-Д (рисунок 2.1) обеспечивает две рабочие скорости вращения двигателя М1: основную (номинальную) wдном и половинную, равную 0,5wдном . Управление системой осуществляется с помощью командоаппарата S5, имеющего пять положений. Когда S5 находится в положении 1, двигатель М1 работает на основной характеристике, переключение в положение 2 обеспечивает вращение двигателя с половинной скоростью. В положении 3 обмотка возбуждения генератора LG1.2 отключена. В положениях 4 и 5 двигатель М1 вращается в противоположном направлении (реверс) соответственно с половинной и основной скоростью. При номинальной скорости вращения электродвигателя М1 в цепь возбуждения генератора LG1.2 включены резисторы R1 и R2, при половинной скорости – R1, R2, R3. Пуск электродвигателя осуществляется с форсировкой возбуждения генератора, выполняемой закорачиванием на время переходного процесса резисторов R2 и R3 контактами контактора К5. Отключение форсировки выполняется с помощью реле напряжения К6 и К7, включенных на шины генератора G1 и настроенных на напряжения срабатывания, соответствующие значениям выбранной скорости двигателя. Останов электродвигателя происходит при переводе командоаппарата в положение 3, при этом гашение энергии магнитного поля возбуждения генератора осуществляется в разрядном контуре «обмотка возбуждения LG1.2 – разрядное сопротивление R4».
Схема обеспечивает ряд защит электропривода:
- от снижения тока возбуждения двигателя ниже допустимого – с помощью реле обрыва поля К9;
- от превышения напряжения генератора выше допустимого – реле К8;
- максимальную токовую защиту – реле К11;
- нулевую защиту (от самозапуска ЭП после кратковременного исчезновения напряжения в сети переменного тока) – реле К1.
Все реле защиты воздействуют на реле нулевой защиты К1, отключающее обмотку возбуждения генератора.
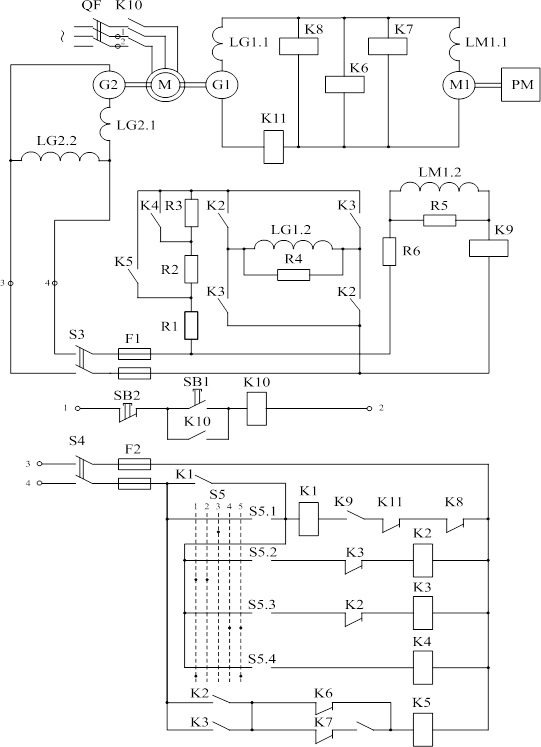
Рисунок 2.1 – Схема электрическая принципиальная системы Г-Д
3. Выбор генератора
Выбор генератора производится по номинальным данным двигателя, при этом номинальное напряжение генератора должно быть приблизительно на 5% больше напряжения двигателя, а
Iн.г. Iн.д. (3.1)
где Iн.г., Iн. Д . – номинальный ток соответственно генератора и двигателя, А.
В соответствии с выше переведенными рекомендациями я выбрала такой генератор:
1. Тип генератора П71
2. Номинальный ток генератора Iн.г. 69.5 А
3. Число витков обмотки якоря Wя.г. 297
4. Сопротивление якоря Rя.г. 0,224 Ом
5. Число витков обмотки последовательного возбуждения WО,В.г . 14
6. Сопротивление ОПВ Rо.вз..г 0,0115 Ом
7. Число витков обмотки возбуждения Wв.г. 950
8. Сопротивление обмотки возбуждения Rв.г. 43 Ом
9. Номинальное напряжение Uн.г. 230 В
10.Номинальная скорость nн.г. 1450 об/мин
11.Число пар полюсов 2р 4
12.Число параллельных ветвей 2а 4
Таблица 3.1- Кривая намагничивания генератора
| F, A | 0 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | 8000 |
| Ф,Вб | 0 | 0,0031 | 0,0053 | 0,00687 | 0,0081 | 0,0088 | 0,0094 | 0,0103 |

Рисунок 3.1 – График зависимости Фг.н. =f(Iв.г.н. )
Построим характеристику ЭДС холостого хода генератора ![]() при номинальной скорости вращения генератора
при номинальной скорости вращения генератора ![]() . ЭДС холостого хода генератора определяем по соотношению:
. ЭДС холостого хода генератора определяем по соотношению:
![]() , (3.2)
, (3.2)
где Eг. –ЭДС генератора, В;
Кг. – конструктивный коэффициент генератора;
Фг. – поток возбуждения, Вб;
wг.н. – номинальная угловая скорость вращения якоря генератора, рад/с.
![]() (3.3)
(3.3)
где n – номинальная скорость генератора, об/мин.
Конструктивный коэффициент генератора Кг определяется по формуле:
![]()
![]() , (3.4)
, (3.4)
где Wя – число витков обмотки якоря генератора;
р – число пар полюсов обмотки возбуждения генератора;
а – число параллельных ветвей обмотки якоря генератора.
Ток возбуждения генератора Iв.г , А:
![]() , (3.5)
, (3.5)
где F – магнитодвижущая сила, А;
Wов.г. – число витков обмотки возбуждения генератора.
![]()
![]()
Результаты расчетов для построения зависимости ![]() свести в табл. 3.2
свести в табл. 3.2
Таблица 3.2– Расчет характеристики холостого хода генератора
| Iв.г. ,A | 1,052 | 1,95 | 2,105 | 3,157 | 4,21 | 4,68 | 5,263 | 6,315 | 8,421 | 12,631 |
| Eг. , A | 89 | 144,79 | 151,16 | 197,23 | 232,54 | 242,72 | 252,64 | 269,87 | 295,71 | 321,54 |
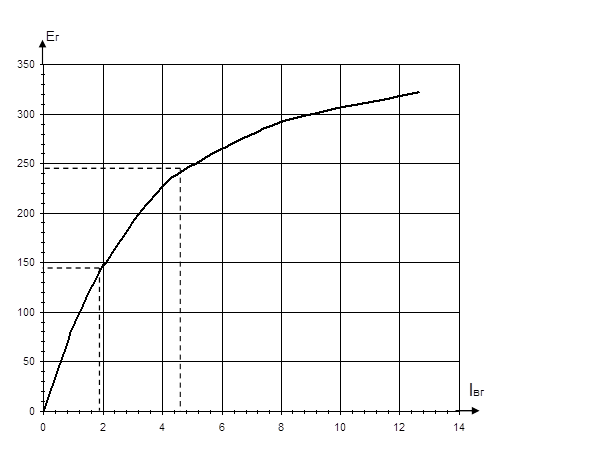
Рисунок 3.2 – Характеристика ЭДС холостого хода генератора
4. Расчет и построение статических характеристик электропривода
Статические характеристик (электромеханическая f(IЯ ) и механическая f(М) ) рассчитываются по известным соотношениям для двигателя постоянного тока независимого возбуждения:
![]() (4.1)
(4.1)
 (4.2)
(4.2)
где КД. – конструктивный коэффициент двигателя;
ФН..Д . – номинальный поток его возбуждения, Вб;
![]() - суммарное сопротивление якорной цепи, Оm.
- суммарное сопротивление якорной цепи, Оm.
Суммарное сопротивление якорной цепи Rя S определяется суммой всех сопротивлений элементов силовой цепи, включенных последовательно с якорем генератора:
![]() = КТ
·
(RЯД
+ RДПД
+ RЯГ
+ RПР
+ RДПГ
) + 4RЩ
,
(4.3)
= КТ
·
(RЯД
+ RДПД
+ RЯГ
+ RПР
+ RДПГ
) + 4RЩ
,
(4.3)
![]() =КТ
·
(RЯД
+ RДПД
) + 2RЩ
, (4.4)
=КТ
·
(RЯД
+ RДПД
) + 2RЩ
, (4.4)
где КТ – температурный коэффициент, учитывающий увеличение сопротивления при нагреве, КТ – 1,24;
RЯД , RЯГ – сопротивление якорной цепи двигателя и генератора, Оm;
RДПГ ,RДПД – сопротивление дополнительных полюсов генератора и двигателя, Оm;
RЩ – сопротивление щеточных контактов, Оm;
RПР – сопротивление соединительных проводов, Оm.
![]() (4.5)
(4.5)
где UЩ – падение напряжения в щеточных контактах,считаем неизменным 1В.
При определении Rпр длину соединительных проводов принять – l=25 м, провода считать медными:
![]() (4.6)
(4.6)
где ρ -удельное сопротивление Ом×мм2 /м (для меди r = 0,017);
l – суммарная длина соединительных проводов, м;
j – допустимая плотность тока, j = 4 А/мм2
IН.Д. – ток якорной цепи системы Г-Д, А
![]() ;
; ![]() Оm;
Оm;
Окончательное суммарное сопротивление якорной цепи будет иметь вид:
![]() =1,24(0,00805+0,00655+0,00077+0,00309)+4*
0,00145=0,902 Оm;
=1,24(0,00805+0,00655+0,00077+0,00309)+4*
0,00145=0,902 Оm;
![]() =1,24·0,28+2·0,0153=0,0129 Оm;
=1,24·0,28+2·0,0153=0,0129 Оm;
Произведение (КД . ·ФН.Д . ) определяем по паспортным данным двигателя:
![]() , (4.7)
, (4.7)
![]() - номинальная угловая скорость вращения двигателя
- номинальная угловая скорость вращения двигателя
![]()
![]() , (4.8)
, (4.8)
![]() ,
,
Статический момент сопротивления находится из соотношения:
МС =КЗ ·МЭМ.Н = 1·148,88 = 148,88, (4.9)
где КЗ – коэффициент нагрузки;
МЭМ.Н . – номинальный электромагнитный момент двигателя М1, Н·м.
![]()
![]() ,
(4.10)
,
(4.10)
Номинальный момент на валу двигателя:
![]()
![]() , (4.11)
, (4.11)
где РН.Д .– номинальная мощность, Вт
Для обеспечения необходимой скорости вращения двигателя ЭДС генератора должна превышать ЭДС двигателя на величину падения напряжения в сопротивлении якорной цепи:
ЕГ =(КД . · ФН.Д . )·Н.Д . IЯ .· RЯ .12
где IЯ. – ток двигателя, А.
Ток статической нагрузки, А:
IЯ. = IН.Д . ·КЗ . =65·1=65, (4.13)
ЕГ =2,43·80,6+65·0,724=242,723 В,
Для построения статических характеристик двигателя необходимо знать всего две точки, так как они представляют собой прямую линию. В качестве таких точек удобно принять точки:
1 Точка идеального холостого тока (М=0, Iя =0),
2 Точка, в которой М=МС со скоростью вращения Н.Д.
3 Точка, в которой Iя. = IН.Д. со скоростью вращения Н.Д.
![]() ,
,
![]() ,
,
 ,
,
Также не обходимо построить статические характеристики при ЭДС генератора работающей при половиной скорости от номинальной.
ЕГ/0,5 =( КД. · ФН.Д . )·Н.Д /2. IЯ .· RЯ В .15
ЕГ/0,5 =2,43·40,3+65·0,721=144,794
![]() ,
,
![]() ,
,
![]() ,
,
Расчет естественной характеристики:
![]() ,
,
![]() ,
,
![]()
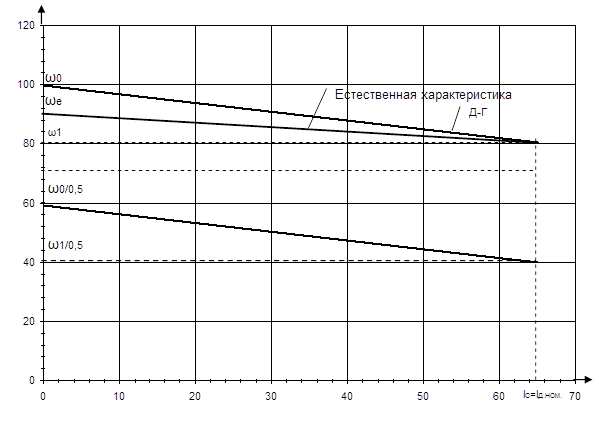
Рисунок 5.1- Электромеханические характеристики систем Д-Г и Д
 Рисунок 5.2- Механические характеристики систем Д-Г и Д
Рисунок 5.2- Механические характеристики систем Д-Г и Д
5. Определение динамических параметров для электродвигателя
Динамическими называются параметры, определяющие характер протекания переходных процессов.
При расчете пренебрегают электромагнитной инерционностью якорной цепи, реакцией якорей генератора и двигателя, влиянием вихревых токов с учетом этих допущений к динамическим параметрам системы генератор-двигатель относятся:
1 Электромагнитная постоянная времени обмотки возбуждения генератора
![]() (5.1)
(5.1)
2 Электромеханическая постоянная времени электропривода - ТМ
 , (5.2)
, (5.2)
где JД – приведенный к валу двигателя эквивалентный момент инерции всей системы ЭП, кг×м2
JД =KJ ·JД. =2·10,25=20,5, (5.3)
где KJ – коэффициент инерции привода;
JД – момент инерции якоря привода, кг·м2 .
![]() ,
,
где LВСР – индуктивность обмотки возбуждения, Гн;
RВГ - активное сопротивление обмотки возбуждения, Оm.
Индуктивность обмотки возбуждения является переменной величиной и зависит от тока возбуждения. Пользуясь кривой намагничивания ФГ =f(F), найдем зависимость LB =f(IВ.Г. ) по формуле:
 , (5.4)
, (5.4)
где ФН.Г ,IВГ.Н – номинальное значение потока и тока возбуждения генератора;
н – коэффициент рассеивания магнитного потока при номиналом режиме. н = 1,1.
Расчеты по формуле (5.4) удобно свести в таблицу 5.1
Таблица 5.1- Расчет индуктивности обмотки возбуждения
| ΔIВГ | ΔФН.Г | ΔФН.Г /ΔIВГ | (3)+(4) | (5)×2рWов.г. | IВСРj | |
| 1,052 | 0,0031 | 0,00208 | 0,00027 | 0,0023 | 12,22 | 0,526 |
| 1,053 | 0,0022 | 0,00149 | 0,0017 | 8,74 | 1,57 | |
| 1,052 | 0,00157 | 0,00168 | 0,00195 | 6,46 | 2,631 | |
| 1,053 | 0,00123 | 0,000647 | 0,00091 | 7,41 | 3,68 | |
| 1,053 | 0,0007 | 0,000855 | 0,0011 | 3,45 | 4,73 | |
| 1,052 | 0,0009 | 0,000427 | 0,00069 | 4,18 | 5,78 | |
| 2,106 | 0,0009 | 0,000213 | 0,0004 | 2,62 | 7,36 | |
| 4,21 | 0,0009 | 0,00294 | 0,0032 | 1,52 | 10,52 |
По данным таблицы 5.1 строимзависимость ![]() .
.
 (5.5)
(5.5)
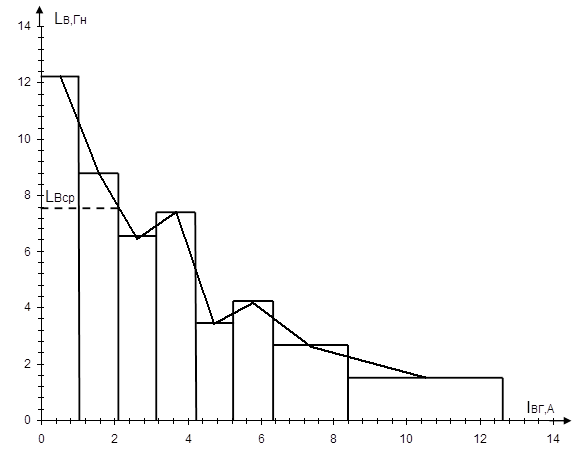
Рисунок 5.1-Расчет LВ.СР.
LВСР = 7,9 Гн,
![]() .
.
6. Определение коэффициента форсировки
Для сокращения длительности переходного процесса в системе генератор-двигатель используется методы форсированного изменения тока возбуждения. Как правело, форсировка возбуждения осуществляется за счет приложения повышенного напряжения UC к цепи возбуждения генератора на период разгона двигателя до основной скорости.
UC =KФ · ·UВ , (6.1)
где KФ – коэффициент форсировки;
UВ – напряжение на обмотке возбуждения генератора в установившемся
режиме, В.
UВ =IВГН ··RВГ =4,68·43=201,24, (6.2)
Предварительное значение коэффициента форсировки определяем из условия, что K1 во время форсировки закорочено, и максимальный ток якоря Iя мах во время пуска не превысит допустимого IДОП =2,25·IД.Н . = 146,25 А.
 (6.3)
(6.3)
где IКЗ – ток КЗ при ЭДС генератора, обеспечивающей номинальную скорость вращения двигателя, А.
IКЗ =ЕГ1 /RЯ =242,7/0,721=336,615 , (6.4)
где ЕГ1 - ЭДС генератора, обеспечивающая основную скорость вращения двигателя, В.
IС =КЗ ·IНД =1·65=65, (6.5)
где IС – ток статической нагрузки,А
 ,
,
UC = 1,23·201,24=247,52 В,
Принимаем ближайшее большее стандартное значение UC . Данное условие удовлетворяет нашим условиям так как UC =440.
7. Расчет резисторов в цепи обмотки возбуждения генератора
7.1 Определение сопротивления разрядного резистора R4
При выборе разрядного резистора R4 необходимо выполнить два условия.
Во-первых, допустимое перенапряжение на обмотке возбуждения генератора в момент ее отключения, находящейся под номинальным током, не должно превышать десятикратного номинального напряжения возбуждения, т.е.
Iн.г ×R4 £ 10×Uг.н. (7.1.1)
С учетом (2.32) для величины сопротивления R4 можно записать первое условие:
R4 £ 10×Uвн / Iвгн , (7.1.2)
или:
R4 £ 10×Rвг . (7.1.3)
Во-вторых, максимальное значение тока якорной цепи при этом не должен превышать допустимого по условиям коммутации:
Iяmax £ kIд.н , (7.1.4)
где k – коэффициент перегрузки по току, k=2,28.
Для расчета R4 пользуются упрощенной зависимостью:
 , (7.1.5)
, (7.1.5)
где Тво – постоянная времени обмотки возбуждения при ее отключении,
Тво =Lвср /(Rвг +R4), c.
С учетом условия (6.1.4) выражение (6.1.5) преобразуется к виду:
 , (7.1.6)
, (7.1.6)
где n=R4/Rвг .
Из (7.1.6) найдем n, для этого сначала найдем левую часть равенства:
![]()
![]()
Теперь из равенства (7.1.6) найдем n, методом подбора

Таблица 7.1.1- опредиленеи n:
| n | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 0,42 | 0,486 | 0,524 | 0,559 | 0,588 | 0,612 | 0,184 | 0,652 | 0,668 |
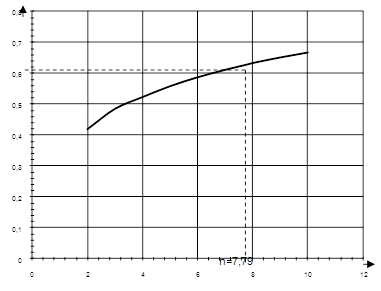
Рисунок 7.1.1-График зависимости  =f(n)
=f(n)
R4=n·Rв.г. =7,79·43=335 Ом
7.2 Определение сопротивления резисторов R1, R2, R3
Резистор R1 при форсированном пуске служит для гашения избытка сетевого напряжения (напряжение генератора-возбудителя) В,
Uизб = Uс – Кф ×Uвр . (7.2.1)
Uизб =440-1,22·201,24=194,5
Сопротивление резистора R1 можно определить по формуле
 , (7.2.2)
, (7.2.2)
где Iвф ,А – установившееся значение тока в цепи возбуждения при форсировке;
Iвф = Кф ×Iвг +IR 4 , (7.2.3)
где IВГ ,A – ток возбуждения генератора при форсировке:
IВГ =КФ · Iвг =1,22·4,68=5,709,
где IR 4 ,А – ток в разрядном сопротивлении R4, определяемый соотношением
IR 4 =Кф ×Uвр /R4=247,52/335=0,732, (7.2.4)
Таким образом ток в цепи возбуждения при форсировке, A:
Iвф =5,709+0,732=6,44,
Сопротивление резистора: Ом
![]() ,
,
Уточненное значение R1 определяют по формулам:
 (7.2.5)
(7.2.5)
Где: ![]() , (7.2.6)
, (7.2.6)
![]() , (7.2.7)
, (7.2.7)
Таблица 7.2.1 – опредиление сопротивления R1
| R1 | Kф’ | Iя max |
| 30,19 | 1,22 | 178 |
| 40 | 1,067 | 163 |
| 44 | 1,015 | 160 |
| 45,3 | 0,999 | 158 |
 , (7.2.8)
, (7.2.8)
Учитываем то, что К ‘ ф не должно быть больше единицы, поэтому R1=45,3 Ом (выбираем из условия при К ‘ ф =1). В этом случае форсировка будет реализована посредством постоянно включенного сопротивления R1, а сопротивление R2 будет отсутствовать.
Сопротивление резистора R3 находят из условия получения половинной скорости вращения двигателя:
 , (7.2.9)
, (7.2.9)
где Iвг0,5 – ток возбуждения генератора, обеспечивающий половинную скорость вращения, А. Iвг0,5 =1,98
![]() .
.
Заключение
Целью данного курсового проекта было закрепление и углубление теоретических знаний по электромагнитным и электромеханическим свойствам машин постоянного тока, а также изучение физических явлений в системе генератор-двигатель (Г-Д) при переходных режимах, овладение аналитическим методом расчета переходных процессов (п.п.) в нелинейной электромеханической системе электропривода (ЭП) и исследование влияния параметров системы на характер переходных процессов.
Управление по системе «генератор – двигатель» выгодно отличается тем, что оно не требует применения силовых контакторов, реостатов и т. п. Поскольку управление двигателем осуществляется путем регулирования сравнительно небольших токов возбуждения, оно легко поддается автоматизации. Независимое возбуждение генератора обеспечивает широкое, плавное и экономичное изменение напряжения на зажимах якоря двигателя.
Недостатками данной системы являются низкое к.п.д., большая установленная мощность из-за наличия трех машин.
Список источников информации
1. Чиликин М.Г. и др. Основы автоматизированного электропривода. М.: Энергия, 1974. –567 с.
2. Ключев В.И. Теория электропривода: Учеб. для вузов. –М.: Энергоатомиздат, 1985. –560 с.
3. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. –М.: Наука. Гл. ред. физ.мат. лит., 1981. –720 с.
4. Андреев В.П., Сабинин Ю.А. Основы электропривода. –М.; Л.: Госэнергоиздат, 1963. –722 с.
5. Попович М.Г., Борисюк М.Г., Гаврилюк В.А. та ін. Теорія електропривода. –К.: Вища шк.. 1993. –494 с., іл.
6. Методические указания по выполнению курсового проекта по курсу «Теория автоматизированного электропривода» для студентов специальностей 7.092203 (7.092206, 7.090803) /Сост. Клепиков В.Б., Горохов А.Г., Шамардина В.Н., Касторный П.М. – Харьков: НТУ «ХПИ», 2003. - с.