| Скачать .docx |
Курсовая работа: Курсовая работа: Микропроцессорная система управления технологическим оборудованием типа CNC Модуль входных сигналов
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Омский государственный технический университет»
Кафедра «Автоматизация и роботехника»
Пояснительная записка к курсовому проекту
по дисциплине «Схемотехника систем управления»
Тема: «Микропроцессорная система управления технологическим оборудованием типа CNC. Модуль входных сигналов»
Разработал: ст. гр. А-416
Д.С. Петраков
Омск 2010
Аннотация
В данной курсовой работе разрабатывается микропроцессорная система управления технологическим оборудованием, проектируется модуль выходных управляющих сигналов на базе интерфейса МПИ.
МПСУ ТО может быть использована для управления роботами, станками и другими автоматизированными устройствами в разных областях промышленности.
Модуль вывода управляющих сигналов предназначен для формирования дискретных сигналов на различные исполнительные устройства технологического оборудования.
|
Содержание
Аннотация
Введение
1. Разработка структурной схемы МПСУ ТО и модуля выходных управляющих сигналов
1.1 Разработка структурной схемы МПСУ
1.2 Разработка структурной схемы модуля выходных управляющих сигналов
2. Разработка принципиальной электрической схемы модуля
3. Разработка сборочного чертежа модуля
4. Расчетная часть проекта
4.1.1 Расчет элементов делителя
4.1.2 Расчет нагрузочного резистора
4.2 Расчет потребляемых модулем токов от источников питания
4.3 Расчёт фильтра питающего напряжения
4.4 Проверка разъемов по току
Заключение
Библиографический список
Приложения
|
Введение
Автоматизация технологических процессов является одним из решающих факторов улучшения качества продукции, повышения производительности и улучшения условий труда. Все существующие и строящиеся промышленные объекты в той или иной степени оснащаются средствами автоматизации.
При создании современных автоматизированных систем управления наблюдается мировая интеграция и унификация технических решений. Основное требование современных систем автоматического управления – это открытость системы, когда для нее определены и описаны используемые форматы данных и процедурный интерфейс, что позволяет подключить к ней “внешние” независимо разработанные устройства и приборы.
Стандартизация является основой для текущей тенденции развития программных и технических средств автоматизации. Она охватывает с каждым годом все большее число свойств и характеристик средств, способов их построения, условий их работы. Она создает и способствует успешной реализации открытости программных и технических средств разных фирм друг к другу путем унификации их интерфейсов. Наряду с унифицированными интерфейсами, наличие также у отдельных средств автоматизации модульного исполнения позволяет производить сборку конкретных систем с индивидуальными свойствами из набора открытых (большей частью стандартизированных) модулей. Развитие этой тенденции на различные классы программных и технических средств автоматизации, наряду с общими тенденциями стандартизации и открытости, позволяет собирать из готовых модулей разных производителей все более значительные части требуемых систем автоматизации. Данное направление развития средств автоматизации делает системы управления все более гибкими, легко перестраиваемыми и расширяемыми по мере необходимости.
Тема данного курсового проекта: “Микропроцессорная система управления технологическим оборудованием. Модуль вывода управляющих сигналов”. Современные микропроцессорные системы управления проектируются на основе модульного принципа построения, предусматривающего выполнение всех модулей системы как функционально законченных элементов. При этом необходимо обеспечить функциональную, электрическую и механическую совместимость модулей в системе.
Реализация данных требований возможна при применении соответствующих стандартных интерфейсов. Одним из стандартизированных интерфейсов является интерфейс МПИ, на базе которого в курсовом проекте необходимо спроектировать модуль выходных управляющих сигналов для системы управления технологическим оборудованием.
При выполнении курсового проекта разрабатываются структурные схемы МПСУ и модуля выходных управляющих сигналов, принципиальная электрическая схема модуля, сборочный чертеж модуля, проводятся все необходимые расчеты.
1. Разработка структурных схемы МПСУ и модуля входных дискретных сигналов
1.1 Разработка структурной схемы МПСУ
Функции микропроцессорной системы управления (МПСУ) можно определить через систему его необходимых внешних взаимодействий. Взаимодействие МПСУ с объектом-станком состоит в управлении формообразованием детали (геометрическая задача), в управлении дискретной автоматикой станка (логическая задача), в управлении рабочим процессом станка (технологическая задача). Взаимодействие с окружающей производственной средой (терминальная задача) проявляется через диалог с оператором и информационный обмен с управляющей ЭВМ более высокого ранга.
Структурная схема проектируемой МПСУ представлена на листе графической части проекта КП.2068.998-А1-01-22.00.000.Э1.
В МПСУ входят следующие модули: модуль центрального процессора, модули связи с оператором, модуль связи с ЭВМ верхнего уровня, модуль связи с СУ промышленного робота, модули управления приводами, модули вывода управляющих сигналов, модули ввода дискретных сигналов, модули адаптивного управления, модули измерительных преобразователей.
Модуль центрального процессора предназначен для управления работой всех элементов МПСУ ТО на основе управляющей программы, включает в себя микропроцессор, ПЗУ, ОЗУ. Обмен информацией в системе осуществляется в режиме адресного обмена с использованием 8-и разрядной ШД.
Модули связи с оператором (МСО) предназначены для ввода/вывода управляющих программ, вывода информации о ходе технологического процесса на индикацию либо дисплей, а также для оперативного управления технологическим процессом. МСО обеспечивает связь с типовым набором терминальных устройств, в который входят: пульт оператора, пульт инженера, дисплей, перфоратор ленточный, фотосчитывающее устройство, устройства ввода/вывода на гибких и жестких магнитных дисках.
Модуль связи с ЭВМ верхнего уровня предназначен для обеспечения возможности встраивания МПСУ в систему управления ГПС. Модуль осуществляет функциональное и электрическое согласование сигналов, а также преобразование параллельных кодов микроЭВМ УЧПУ в последовательные коды канала связи и обратные преобразования. По каналам связи с ЭВМ верхнего уровня обычно передается диагностическая информация о ходе технологического процесса и оборудования, статическая информация, а также новые управляющие программы в УЧПУ при изменении типа обрабатываемых деталей.
Модуль связи с СУ промышленного робота выполняет функции формирования интерфейса разработчика. Он может быть аналогичен модулю связи с ЭВМ верхнего уровня либо иным, если СУ ПР не имеет стандартного выхода для встраивания в СУ ГПС.
|
Модули вывода управляющих сигналов предназначен для формирования дискретных сигналов типа “вкл/выкл” на различные исполнительные устройства ТО (электромагнитные муфты коробки скоростей; электромагнитные клапаны управления в пневмо- и гидросистеме; электродвигатель насоса охлаждения; привод автооператора смены инструмента; приводы различных средств автоматизации вспомогательных операций). Модули гальванически развязывают и согласуют по уровням напряжений и токов сигналы МПСУ с сигналами управления исполнительными силовыми устройствами. Сигналы управления с модулей передаются на исполнительные элементы через стойку силового управления, где располагаются контакторы, пускатели, защита.
Модули ввода дискретных сигналов (сигналов типа “да/нет”) гальванически развязывают и согласуют сигналы микроЭВМ с сигналами, приходящими от различных датчиков ТО. К таким датчикам относятся: конечные выключатели крайнего положения механизмов перемещения по координатам; датчики безопасности, ограничивающие рабочую зону ТО; датчики положения и очувствления автооператора смены инструмента; датчики реле давления в пневмо- и гидросистеме; органы управления на пульте ТО (кнопки, переключатели и т.п.).
Выключатель концевой серии НВ-701 (далее - «выключатель»), предназначен для коммутации электрических цепей управления переменного и постоянного тока. Выключатели приводятся в действие управляющими упорами (кулачками) в определенных точках пути контролируемого объекта. Вид климатического исполнения У1 по ГОСТ 15150-69. Основные параметры и характеристики выключателей приведены в таблице 1.1.
Таблица 1.1
| Ток продолжительного режима, А |
Включаемый переменный ток, напряжение до 500 В, А |
Включаемый постоянный ток, напряжение 110, 220, 440 В, А |
Отключаемый переменный ток, напряжение до 500 В, А |
Отключаемый постоянный ток, напряжение 110, 220, 440 В, А |
| 10 |
50 |
25 |
10 |
2,0/1,5/0,5 |
· Рабочее положение выключателей в пространстве – лапами вниз;
· Степень защиты выключателей - IP44;
· Максимальная частота включений до 600 в час;
· Усилие необходимое для привода выключателей, - 100 Н;
· Механическая износостойкость не менее 106 циклов В-О;
· Масса выключателей - 2,7 кг.
Бесконтактные блокираторы Т 4000 Multi. Система ограничителей Т 4000 Multi состоит из следующих компонентов: датчиков (от одного до четырех), ответной части датчика с уникальным кодом (от одного до четырех) и одного релейного блока управления. Ответная часть имеет индивидуальную кодировку, благодаря чему ограничитель не может быть открыт с помощью посторонних предметов. Релейный блок имеет два светодиодных индикатора рабочего статуса, систему блокировки и может управляться внешним устройством.
Серия Т 4000-1RCA04 имеет расширенные возможности:
· подключение нескольких датчиков к одному блоку управления
· надежная защита от ошибочного срабатывания благодаря индивидуальному кодированию датчиков
· компактный дизайн датчика 42 x 25 x 12 мм
· класс защиты устройств IP 67.
Технические характеристики:
· Категория безопасности - 4 (EN 954-1);
· Кол-во датчиков - 1…4;
· Материал корпуса – пластик;
· Класс защиты - IP 20;
· Напряжение питания - 24 В пост. тока;
· Напряжение изоляции - 250 В пост. тока;
· Напряжение пробоя - 4000 В перем. тока;
· Диапазон рабочих температур - 0…55°С;
· Кол-во безопасных выходов (НР) – 2;
· Кол-во диагностических выходов – 4;
· Категория по EN 60947-5-2 - 1,5 A (230 В перем. тока), 1,2 A (24 В пост. тока);
· Кол-во срабатывания – 10 млн.
Индуктивный датчик P1D1-S03-0.6NO3A2 предназначен для контроля положения металлических объектов. В промышленном оборудовании используется в качестве бесконтактного концевого и путевого выключателя. Индуктивные датчики – самые распространенные бесконтактные датчики положения. Технические характеристики датчика представлены в таблице 1.2.
Таблица 1.2
| Исполнение |
Shielded (заподлицо) |
| Дистанция срабатывания |
0.6 mm |
| Материал корпуса |
Нержавеющая сталь |
| Рабочее напряжение |
10-30 V DC |
| Максимальная частота срабатывания |
2000 Гц |
| Максимальный ток нагрузки |
200 мА |
| Время отклика |
0.1 ms |
| Категория защиты |
IP67 |
| Защита от короткого замыкания |
есть |
| Материал чувств. зоны |
POM (Полиформальдегид/Polyoxymethylene) |
| Доступное подключение |
NO / NPN |
Датчик давления Rosemount 3051S предназначен для измерения и непрерывного преобразования давления в унифицированный выходной сигнал постоянного тока или напряжения. Используются датчики в регуляторах и других устройствах автоматики в системах автоматического контроля, регулирования и управления технологическими процессами в системах водообработки, отопления, вентиляции и кондиционирования; гидравлических системах, холодильной технике, расходомерах и счетчиках; дизельных двигателях; тормозных системах; уровнемерах, в испытательных стендах и т.д. Технические характеристики датчика Rosemount 3051S представлены в таблице 1.3.
Таблица 1.3
| Характеристики |
Значение |
|
| Основная погрешность относительная |
приведенная |
±0,025%, ±0,055% |
| ±0,04% (Исполнение Ultra for flow) |
||
| Стабильность характеристик в условиях эксплуатации |
±0,2% за 10 лет |
|
| Диапазон измеряемых давлений |
минимальный |
0-0,025кПа |
| максимальный |
0-69 МПа |
|
| Диапазон температур |
окружающей среды |
-51…+85°С |
| измеряемой среды |
-73…+205°С |
|
| Диапазон перенастройки пределов измерений |
1:200 |
|
| Материал мембраны |
Нержавеющая сталь 316 (+ исполнение с золотым покрытием); - Hastelloy C276 - Monel 400 (+ исполнение с золотым покрытием) - Тантал |
|
Модули адаптивного управления – это многоканальные аналого-цифровые преобразователи. Они предназначены для преобразования аналоговых сигналов, приходящих от адаптивных датчиков, в цифровой код и передачи их в микроЭВМ МПСУ. В модулях обеспечивается гальваническая развязка аналоговой и цифровой части. В качестве датчиков используются: силомоментные, формирующие сигналы пропорциональные моменту, возникающему в процессе обработки детали; датчики тока (мощности) электродвигателя шпинделя; датчики контроля и диагностики инструмента (акустические, индуктивные, емкостные и др.); датчики контроля и диагностики ТО (измерительные головки, устанавливаемые вместо инструмента, датчики активного контроля деталей). Модули замыкают обратные связи соответствующих контуров адаптивного управления. МПСУ становится адаптивной только при наличии соответствующего программного обеспечения. Использование адаптивного управления позволяет существенно повысить точность обработки изделий на технологическом оборудовании.
Модули измерительных преобразователей предназначены для преобразования информации, поступающей от датчиков положения механизмов технологического оборудования, в цифровой код микроЭВМ. Модуль замыкает обратные связи по положению следящих систем приводов соответствующих координат. В МПСУ применяются индукционные датчики (линейные и круговые индуктосины, вращающиеся трансформаторы, сельсины), а также фотоэлектрические (импульсные, кодовые, растровые) датчики положения.
2. Разработка структурной схемы модуля входных дискретных сигналов
Структурная схема модуля входных дискретных сигналов разрабатывается на основании технического задания на проектирование данного модуля. Обмен информацией осуществляется по интерфейсу И-41.
Структурная схема МВДС представлена в составе структурной схемы системы управления. Модуль состоит из дешифратора адреса DC (ДА), регистров данных RG (РД), мультиплексоров (МХ), преобразователей напряжения от датчиков в напряжение логического уровня и логических элементов.
В состав дешифратора адреса входят: задатчик адреса, схема сравнения и схема дешифратора. Задатчик адреса предназначен для задания адреса модуля, выбираемого из адресного пространства ША. В данном модуле задатчик адреса выполнен на элементах SA1-SA5 и RR1-RR5. В схеме сравнения сравнивается адрес модуля с задатчика адреса и адрес, выставляемый в данный момент процессором на ША. При равенстве кодов формируется сигнал разрешения дешифрации, который выдается в схему дешифратора. Схема дешифратора реализована на микросхемах КР1533КП7.
В МВДС присутствует три регистра данных. Они предназначены для записи, хранения и выдачи информации на ШД и выполнены на микросхемах КР1533ИР22.
В схеме также присутствуют также пять мультиплексоров. В данной схеме они предназначены для передачи информации от преобразователей напряжения в регистры данных, а также для проверки работоспособности регистров данных. Мультиплексоры выполнены на микросхемах КР1533КП2.
Также в модуле МВДС присутствуют 3 преобразователя напряжения. Они предназначены для преобразования уровня напряжения датчиков в напряжение логического уровня.
|
|
Логические элементы «И» реализованы на микросхеме КР1533ЛИ1.
Логические элементы «ИЛИ» реализованы на микросхеме КР1533ЛЛ1.
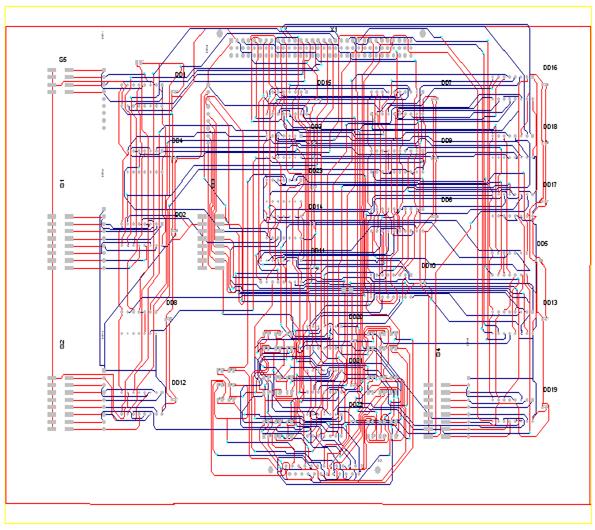
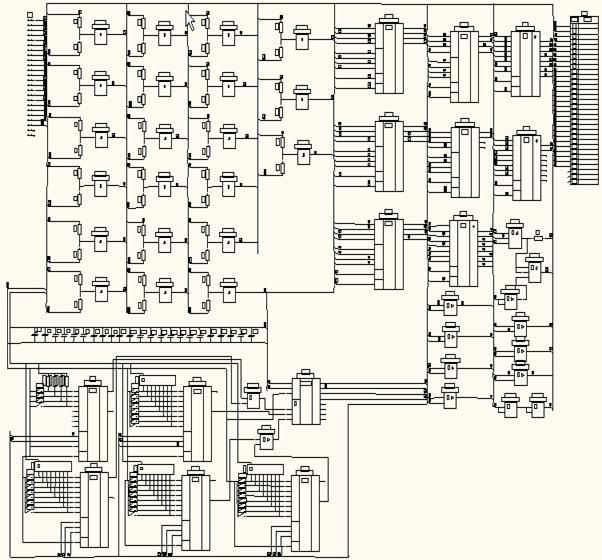
Принципиальная электрическая схема МВДС представлена на листе графической части проекта КП.2068.988-А1-22-00.00.000.Э3. Перечень элементов на электрическую принципиальную схему представлен в приложении В.
Разрабатываемый модуль работает в соответствии со стандартным протоколом записи интерфейса И-41. Чтение информации осуществляется за три цикла программного обмена процессора с модулем. Диагностика регистров данных осуществляется за 4 цикл программного обмена процессора с модулем.
В данной схеме роль задатчика адреса играют резистивные сборки NR1, RR1, RR2, RR3, RR4 и наборы микропереключателей SA1, SA2, SA3, SA4, SA5. Схема сравнения на схеме реализована на мультиплексорах D1, D2, D12, D13, D19 серии КР1533КП7. Сама дешифрация адреса реализована на дешифраторе D18 серии КР1533ИД7.
Процедура чтения выполняется ведущим устройством в соответствии с временной диаграммой, представленной на рис. 1.
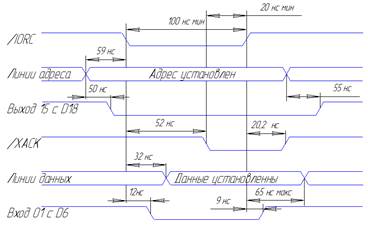
Рис.1 – Временная диаграмма
Реализуется процедура следующим образом.
Ведущий на лини ADRF-ADR0 выставляет адрес регистра данных. Адрес проходит через микросхемы D1, D2, D12, D13, D19 КР1533КП7, D5 КР1533ЛЛ4, D14 КР1533ЛИ8 и D18 КР1533ИД7. При подача адреса на выбирающие входы 09, 10, 11 микросхем D1, D2, D12, D13, D19 будет подаваться комбинация логических нулей и единиц, по которой мультиплексоры выберут с каких входов 01, 02, 03, 04, 12, 13, 14 или 15 передавать информацию на выходы 05 и инверсный 06. При нужной для нашего модуля комбинации на выходах 05 сформируется логическая единица, а на выходах 06 логический ноль. Далее с выходов 05 микросхем D1 и D2 логические единицы поступают на входы 09 и 10 микросхемы D14 формирую тем самым на выходе 08 данной микросхемы высокий уровень напряжения поступающий на разрешающий вход 06 микросхемы D18. Сигнал логического нуля с выхода 06 микросхемы D12 поступает на разрешающий вход 04 микросхемы D18. Логические нули с выходов 06 микросхем D13 и D19 поступают на входы 12 и 13 микросхемы D5 формируя на выходе 11 данной микросхемы сигнал низкого уровня напряжения. Этот логический ноль поступает на разрешающий вход 05 микросхемы D18. После приходов сигналов разрешения дешифрации на входа 04, 05, 06 и сигналов на входы выборки 01 и 02 микросхемы D18, формируется сигнал логического нуля на одном из выходов 12, 13, 14 или 15 (![]() ). Этот сигнал поступает на вход 01 микросхемы D3.
). Этот сигнал поступает на вход 01 микросхемы D3.
Одновременно с этим на вход 02 микросхемы D3 ведущее устройство вырабатывает сигнал низкого уровня напряжения /IORC, который предварительно усиливается через 12 вход этой же микросхемы. Микросхема D3 работает как логическое «ИЛИ» и при подаче на входы 01 и 02 логического нуля, на выходе 03 появляется низкий уровень напряжения. Далее по схеме с выхода 03 микросхемы D3 этот логический ноль поступает на вход 01 микросхемы D8, выполняющей функцию логического «И», и выдается с выхода 12 на вход 03 и 04 микросхемы D8. В итоге на выходе 06 микросхемы D8 вырабатывается логический ноль (![]() ), который является сигналом /XACK и выдается на шину управления для передачи ведущему устройству.
), который является сигналом /XACK и выдается на шину управления для передачи ведущему устройству.
Логический ноль, выдаваемый с выхода 03 микросхемы D3, выдается также на вход 01 микросхемы D6 являющейся регистром серии КР1533ИР22. Вход 01 микросхемы D6 является входом управления Z-состояния выходов регистра, и сигнал низкого уровня напряжения является разрешающим, переключающим выходы регистра из Z-состояния в логический ноль или единицу. После прихода сигнала на вход 01 регистр выдает хранящиеся в нём данные на шину данных (![]() ).
).
Ведущее устройство получив сигнал /XACK, принимает данные и снимает сигнал /IORC. После снятия сигнала /IORC, со входа 02 микросхемы D3, с выхода 03 этой микросхемы исчезает логический ноль и появляется логическая единица. Эта логическая единица поступает на вход 01 микросхемы D8, поскольку в этот момент на входы 02 и 13 подаются единицы, то на выходе 12 также вырабатывается логическая единица. Затем сигнал высокого уровня поступает на входы 03 и 04 микросхемы D8 и с выхода 06 этой микросхемы вырабатывается логическая единица снимающая сигнал /XACK (![]() ). С выхода 03 микросхемы D3 логическая единица подается на вход 01 микросхемы D6, что приводит к тому что на выходах регистра формируется сигнал Z-уровня и передача данных завершается (
). С выхода 03 микросхемы D3 логическая единица подается на вход 01 микросхемы D6, что приводит к тому что на выходах регистра формируется сигнал Z-уровня и передача данных завершается (![]() ). После снятия сигнала /IORC снимается адрес с шины адреса – с выходов 05 микросхем D1, D2 снимаются логические единицы, а с выходов 06 микросхем D12, D13, D19 снимаются логические нули, с выхода 08 микросхемы D14 исчезает сигнал высокого уровня напряжения, а с выхода 11 микросхемы D5 исчезает низкого уровня напряжения. Таким образом снимаются сигналы с разрешающих входов 04, 05, 06 микросхемы D18 и на всех выходах микросхемы D18 будет высокий уровень напряжения (
). После снятия сигнала /IORC снимается адрес с шины адреса – с выходов 05 микросхем D1, D2 снимаются логические единицы, а с выходов 06 микросхем D12, D13, D19 снимаются логические нули, с выхода 08 микросхемы D14 исчезает сигнал высокого уровня напряжения, а с выхода 11 микросхемы D5 исчезает низкого уровня напряжения. Таким образом снимаются сигналы с разрешающих входов 04, 05, 06 микросхемы D18 и на всех выходах микросхемы D18 будет высокий уровень напряжения (![]() ).
).
Процедура диагностики выполняется ведущим устройством в соответствии с временной диаграммой, представленной на рис. 2.
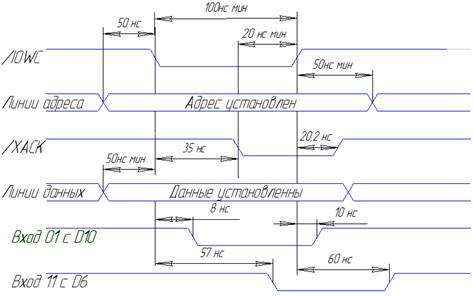
Рис. 2 – Временная диаграмма
Реализуется процедура следующим образом.
Ведущий на лини ADRF-ADR0 выставляет адрес регистра данных. Адрес проходит через микросхемы D1, D2, D12, D13, D19 КР1533КП7, D5 КР1533ЛЛ4, D14 КР1533ЛИ8 и D18 КР1533ИД7. При подача адреса на выбирающие входы 09, 10, 11 микросхем D1, D2, D12, D13, D19 будет подаваться комбинация логических нулей и единиц, по которой мультиплексоры выберут с каких входов 01, 02, 03, 04, 12, 13, 14 или 15 передавать информацию на выходы 05 и инверсный 06. При нужной для нашего модуля комбинации на выходах 05 сформируется логическая единица, а на выходах 06 логический ноль. Далее с выходов 05 микросхем D1 и D2 логические единицы поступают на входы 09 и 10 микросхемы D14 формирую тем самым на выходе 08 данной микросхемы высокий уровень напряжения поступающий на разрешающий вход 06 микросхемы D18. Сигнал логического нуля с выхода 06 микросхемы D12 поступает на разрешающий вход 04 микросхемы D18. Логические нули с выходов 06 микросхем D13 и D19 поступают на входы 12 и 13 микросхемы D5 формируя на выходе 11 данной микросхемы сигнал низкого уровня напряжения. Этот логический ноль поступает на разрешающий вход 05 микросхемы D18. После приходов сигналов разрешения дешифрации на входа 04, 05, 06 и сигналов на входы выборки 01 и 02 микросхемы D18, формируется сигнал логического нуля на одном из выходов 12, 13, 14 или 15 (![]() ). Этот сигнал поступает на вход 02 микросхемы D4.
). Этот сигнал поступает на вход 02 микросхемы D4.
Одновременно с этим на вход 03 микросхемы D4 ведущее устройство вырабатывает сигнал низкого уровня напряжения /IOWC. Микросхема D3 работает как логическое «ИЛИ-НЕ» и при подаче на входы 02 и 03 логического нуля, на выходе 01 появляется логическая единица. Далее по схеме с выхода 01 микросхемы D4 эта логическая единица поступает на вход 05 этой же микросхемы D4 и далее с выхода 04 микросхемы D4 поступает на вход 05 микросхемы D8, выполняющей функцию логического «И», и выдается с выхода. В итоге на выходе 06 микросхемы D8 вырабатывается логический ноль (![]() 8+7+20=35 нс), который является сигналом /XACK и выдается на шину управления для передачи ведущему устройству.
8+7+20=35 нс), который является сигналом /XACK и выдается на шину управления для передачи ведущему устройству.
Логическая единица, выдаваемая с выхода 01 микросхемы D4, выдается также на вход 01 микросхем D10, D11, D15- D17 являющихся мультиплексорами серии КР1533КП16. Вход 01 этих микросхем является входом переключения с одних информационных входов мультиплексора на другие и сигнал высокого уровня напряжения является разрешающим переключение со входов 2, 5, 11, 14 на входы 3, 6, 10, 13. После прихода сигнала на вход 01 мультиплексор передает информацию со входов 3, 6, 10, 13 на выходы 4, 7, 9, 12. (![]() ).
).
Также, логическая единица с выхода 01 микросхемы D4, поступает на входа 01 и 02 микросхемы D14 с логической функцией «ИЛИ» и далее с выхода 03 поступает на входы 04 и 05 этой же микросхемы D14. Микросхема D14 в данном случае играет роль схемы задержки. С выхода 06 микросхемы D14 логическая единица поступает на входы 02, 05, 10 микросхемы D5 и с выходов 03, 06, 08 микросхемы D5 поступает на вход разрешения записи 11 микросхем D6, D7, D9. По этому сигналу регистры запоминают ту информацию что находилась на информационных входах микросхем мультиплексоров (![]() ).
).
Происходящие в модуле процессы после выработки на шину управления сигнала /XACK происходят аналогично описанным выше в процедуре чтения.
3. Разработка сборочного чертежа
Модуль должен быть выполнен в виде одноплатного устройства с габаритами печатной платы (ПП) 200 х 250 мм. Толщина материала ПП – 3 мм. Разработка ПП производится с использованием справочных данных и рекомендаций [13].
Ввиду достаточно большой плотности монтажа следует использовать двустороннюю ПП. Метод изготовления ПП выбирают в зависимости от сложности принципиальной электрической схемы, конструктивно-технологических требований к разрабатываемому изделию и оснащенности предприятия-изготовителя необходимым оборудованием. В нашем случае, можно использовать комбинированный метод [13], при котором сочетается химическое травление фольгированного материала с электрохимической металлизацией отверстий. Метод обеспечивает надёжную пайку элементов и используется при изготовлении двусторонних ПП.
Центры всех отверстий на ПП, включая крепёжные, должны располагаться в узлах координатной сетки. Шаг координатной сетки выбирается равным 1,25 [13] Размеры и конфигурацию крепёжных и других конструктивных отверстий следует выбирать по ГОСТ 11284-75. Диаметры монтажных и переходных неметаллизированных отверстий выбираем по ГОСТ 10317-79 для разных типов элементов равными 0,6; 0,9; 1,1 мм. Шероховатость поверхностей монтажных не металлизированных отверстий и торцов ПП должна соответствовать ГОСТ 2789-73 Rz £ 80, а для металлизированных отверстий Rz £ 40.
Отверстия, соединенные печатными проводниками и отверстия под выводы навесных элементов, а также металлизированные отверстия на наружных слоях ПП со стороны фольги должны иметь контактные площадки (КП). Размеры КП выбираются в зависимости от диаметра отверстия по данным, рекомендованным международной электротехнической комиссией (МЭК) и составляют для диаметров отверстий 0.6, 0.9, 1.1 мм соответственно 1.8, 2.3, 2.5 мм [13]. При необходимости (например, при прохождении печатного проводника между двумя соседними выводами микросхемы) размеры КП могут быть занижены с одной или двух сторон. Площадь оставшейся части КП за вычетом диаметра отверстия должна быть не менее 1.6 мм2 для плат второго класса плотности.
Для предотвращения образования остатков припоя из-за натекания при пайке, что может привести к закорачиванию проводников, рекомендуется по возможности выдерживать зазор 1,25 мм между проводниками, а также между проводником и КП. Печатные проводники выполняют одинаковой ширины на всем их протяжении.
|
В качестве материала ПП можно использовать двухсторонний нагревостойкий, фольгированный стеклотекстолит марки СФ-2Н-50Г с номинальной толщиной фольги 50 мкм.
В целях защиты от влаги плату с обеих сторон покрывают двумя-тремя слоями лака ЭП-730 ГОСТ 20824-84 или УР-232 ТУ 6-10-863-84 или аналогичным.
Сборочный чертеж выполняют в соответствии с требованиями ГОСТ 2.109-73 с учетом требований ГОСТ 2.413-72.
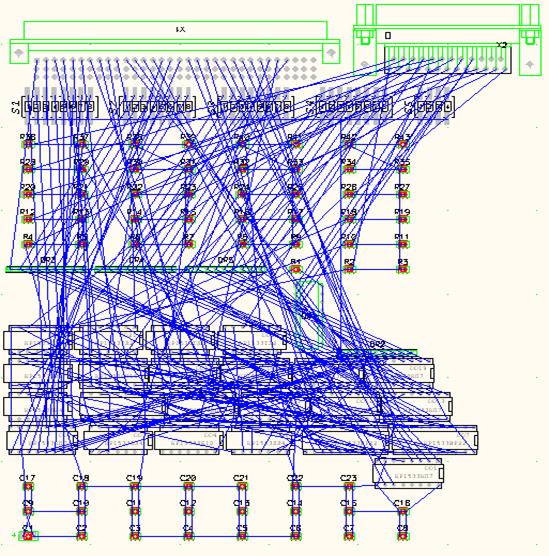
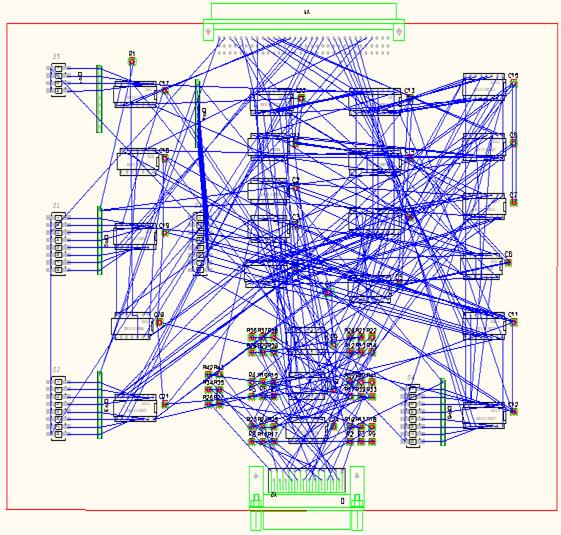
Сборочный чертеж печатной платы представлен на листе чертежей КП.2068.988-А2-22-00.00.000.СБ графической части работы. Спецификация на сборочный чертеж представлена в приложении F.
|
4. Расчетная часть проекта
4.1 Расчет дискретных элементов
4.1.1 Расчет элементов делителя
Расчёт резисторов R2 и R23 будет производить по следующей формуле
где Uлог – напряжение ТТЛ уровня равное 2,6 В;
UDC – входное постоянное напряжение равное 48 В.
Резистор R23 выбираем из стандартного ряда резисторов. Возьмём R23=240 Ом. Подставив значения в формулу получим
![]()
Полученный резистор R2=5238 Ом не входит в ряд стандартных резисторов. Выбирая из ряда берём ближайший по номиналу резистор на 4,3 кОм. Также рассчитываем мощность резисторов по формуле
![]()
Все резисторы R2-R43 имеют идентичные параметры. По расчёта выбирается резистор R2-R22 МЛТ 0,75 Вт – 4,3 кОм ± 5 % и резисторы R23-R43 МЛТ 0,75 Вт – 240 Ом ± 5 % [6].
4.1.2 Расчет нагрузочного резистора
Расчет резистора R1.
![]()
![]()
По результатам расчёта выбирается резистор R1 МЛТ 0,125 Вт – 820 кОм ± 5 % [6].
4.2 Расчет потребляемых токов модулем от источника питания
Ток, потребляемый схемой по цепи питания, находится как сумма токов потребления отдельных микросхем и дискретных элементов. Токи потребления микросхемами приведены в таблице 4.
Таблица 4.1
| Микросхемы |
Количество |
Ток потребления, мА |
| D1, D2, D12, D13, D19 |
5 |
12,0 |
| D6, D7, D9 |
3 |
27,0 |
| D10, D11, D15-D17 |
5 |
11,0 |
| D3, D5 |
2 |
10,6 |
| D4 |
1 |
22,0 |
| D8 |
1 |
3,0 |
| D14 |
1 |
9,3 |
| D18 |
1 |
10,0 |
| D20-D23 |
4 |
17,0 |
Ток, потребляемый всеми микросхемами:
Мощность, рассеиваемая всеми микросхемами:
PРАС D =UСС ∙IПОТ =5∙329,5= 1647,5 мВт = 1,64 Вт.
Ток, потребляемый резисторами R2-R43:
IПОТ R 2- R 43 =42∙15,0=630,0 мА.
Ток, потребляемый резистором R1:
IПОТ R 1 =3 мА.
Суммарный ток потребления:
IПОТ =IПОТ D + IПОТ R 2- R 23 + IПОТ R 1 =329,5+630+3=
=962,5 мА= 0,962 А.
Максимально рассеиваемая мощность:
4.3 Расчет фильтра питающего напряжения
В данном модуле используется фильтр питающего напряжения, который выполняет два типа фильтрации и содержит 24 фильтрующих конденсаторов: по одному конденсатору на каждую микросхему D2…D23 для подавления высокочастотных помех в цепях питания и один общий блокирующий, который устанавливается для снижения низкочастотных пульсаций в шинах питания и включаются между выводами «питания» и «земля» около разъема печатной платы и рассчитывается на промышленную частоту 50 Гц. Высокочастотные фильтры фильтруют колебания напряжения, возникающие в результате переключения схем, они рассчитываются для частоты 20 кГц.
Расчёт фильтра питания НЧ и ВЧ производится по уравнению резонанса
![]() ,
,
где U – напряжение питания 5 В;
![]() – сопротивление нагрузки;
– сопротивление нагрузки;
f-частота;
C-емкость конденсатора.
- Расчет фильтра питания низких частот.
Сопротивление нагрузки RH:
По результатам расчёта выбирается конденсатор C1 К53-18-16В-120 мкФ ±10% [11].
- Расчет фильтра питания высоких частот.
Все микросхемы D1-D23 разбиваются на две группы: с током потребления до 15 мА (D1-D3, D5, D8, D10-D19) и с током потребления больше 15 мА (D4, D6, D7, D9, D20-D23).
Рассчитывается средний потребляемый каждой группой микросхем ток [8]:
![]()
![]()
Суммарное сопротивление:
![]()
![]()
Из уравнения резонанса (9) рассчитывается емкость конденсаторов С2-С4, С6, С9, С11-С20 и С5, С7, С8, С10, С21-С24:
По результатам расчёта выбираются конденсаторы С2-С4, С6, С9, С11-С20 К10-17-H90 3,9 нФ ±10%, С5, С7, С8, С10, С21-С23 К10-17-H90 8,2 нФ ±10% [11].
4.4 Проверка разъемов по току
Разъем Х1 типа ХХ96-1 рассчитан на рабочее напряжение 700В и на максимальный ток 2А на один контакт [12]. Максимальный ток, передаваемый разъемом Х1 по цепи питания составляет IПОТ = 0,962 А. То есть вполне достаточно для надежности использовать один контакт разъема.
Разъем Х2 типа DIN41612-32M рассчитан на рабочее напряжение 500 В и на максимальный ток 4 А на один контакт [12]. Максимальный ток, передаваемый разъемом Х2 по цепи питания составляет IКОМ =315 мА. То есть вполне достаточно для надежности использовать один контакт разъема.
Заключение
В ходе выполнения курсового проекта была разработана принципиальная электрическая схема модуля входных дискретных сигналов в соответствии с требованиями технического задания на курсовое проектирование с проведением расчетов основных электрических и временных параметров. Данный модуль представляет собой законченную схему с одним системным разъемом, для связи с процессором и одним выходным для связи с датчиками.
Тип интерфейса для связи МПСУ ТО с модулем – И-41.
Обмен информации осуществляется в режиме адресного обмена (чтения) и диагностики (записи).
Разрядность внутренней шины данных - 8 бит.
Гальваническая развязка с отсутствует.
Коммутируемый ток 315 мА, уровень выходного напряжения 48 В dc.
Модуль питается от одного источника питания +5±0,25В и потребляет не более 4,277 Вт.
Разработана печатная плата модуля с использованием САПР P-CAD 2002. Данный модуль имеет 18 входов и может быть использован для слежения за дискретными исполнительными устройствами технологического оборудования
|
1. Компанейц, А.Н. Методические указания для выполнения курсового проекта и СРС по дисциплине “Схемотехника систем управления”: учеб. пособие / А.Н. Компанейц– Омск: Изд-во ОмГТУ, 2007. – 51 с.
2. Компанейц, А.Н. Проектирование систем управления на базе интерфейсов МПИ и И41: учеб. пособие / А.Н. Компанейц – Омск: Изд-во ОмГТУ, 2000. – 48 с.
3. Федотов, А.В. Составление технического задания: Методические указания.- Омск: Изд-во ОмГТУ, 1999. – 24 с.
4. Интерфейс МПИ. Технические средства АСУТП: Отраслевой каталог. /ИНФОРМПРИБОР. – М., 1989. – 120 с.
5. Электронный каталог фирмы Siemens: “Automation & Drives” (Автоматизация и приводы).
6. Резисторы: Справочник / В.В. Дубровский, Д.М. Иванов, Н.Я. Протусевич и др.; Под ред. И.И. Четвертакова и В.М. Терехова. - 2-е изд., перераб.и доп. – М.: Радио и связь, 1991.- 528 c.
7. Иванов, В.И. и др. Полупроводниковые оптоэлектронные приборы: справочник / В.И.Иванов, А.И. Аксенов, А.М. Юшин. – 2-е изд., перераб. и доп. – М.: Энергоатомиздат, 1988. – 448с.
8. Логические интегральные схемы КР1533, КР1554: Справочник / Н. Н. Петровский, А.В. Прибыльский, А.А. Троян, В.С. Чувелов. – М.: 1993. – 456 с.
9. Микросхемы и их применение: Справ. Пособие/ В.А. Батущев, В.Н. Венианимов, и др. – 2-е изд. – М.: Радио и связь, 1990. – 272 с.: ил.
10. www.platan.ru
11. Конденсаторы: Справочник / И.И. Четвертаков, М.Н. Дьяконов, В.И. Присняков и др.; Под ред. И.И. Четвертакова и М.Н. Дьяконова. – М.: Радио и связь, 1993.- 392 c.
12. Каталог фирмы Элекон: Электрические соединители.
13. Справочник по конструированию радиоэлектронной аппаратуры (печатные узлы) / А.И. Горобец, А.И. Степаненко, В.М. Коронкевич. - К.: Технiка, 1985. -312 с.
Приложение А
Приложение В
Приложение С
Приложение D