| Скачать .docx |
Реферат: Лабораторная работа: Исследование свойств звена при охвате обратной связью
Лабораторная работа
по основам теории управления
«Исследование свойств звена при охвате обратной связью»
Красноярск 2010
Введение
Исследовать изменение динамических характеристик, типовых звеньев системы автоматического управления (САУ) при охвате обратной связью.
Обратная связь – связь, при которой на вход регулятора подается действительное значение выходной переменной, а также заданное значение регулируемой переменной.
– жесткая – такая ОС, при которой на вход регулятора поступает сигнал пропорциональный выходному сигналу объекта в любой момент времени.
– гибкая – такая ОС, при которой на вход регулятора поступает не только сигнал пропорциональный выходному сигналу объекта, но и сигнал пропорциональный производным выходной переменной.
Обратная связь может быть как положительной, так и отрицательной. Отрицательная обратная связь (ООС) действует в сторону уменьшения отклонений текущих значений координат объекта от их предшествующих значений, а положительная обратная связь (ПОС) действует в сторону увеличения. Следовательно, ООС позволяет строить наиболее точные САУ, так как несёт в себе информацию обо всех изменениях регулируемой величины; ПОС служит для изменения внутренних свойств отдельных звеньев САУ.
Соединение обратной связью
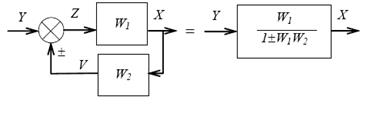
Обозначим сигналы во внутренних точках схемы Z и V .
связь обратный охват динамический
В итоге ![]() отсюда получаем выражение для передаточной функции соединения обратной связью:
отсюда получаем выражение для передаточной функции соединения обратной связью:
![]()
«+» – относиться к отрицательной обратной связи
«–» – относиться к положительной обратной связи
По степени использования информации об объекте различают:
· Разомкнутые системы управления;
· Замкнутые системы управления.
При разомкнутой системе – воздействии на объект осуществляется по заданной программе вне зависимости от результатов управления в предыдущий период времени.
Схема разомкнутой системы управления показана на рис. 1.

Рис. 1
На этом рисунке приняты следующие обозначения:
X – набор величин, характеризующих состояние объекта;
Y – набор величин, определяющих доступную для наблюдения информацию об объекте;
U – набор управляющих воздействий;
О – неконтролируемые внешние воздействия, которые рассматриваются как возмущения и помехи;
J – критерий, характеризующий степень достижения цели управления.
Замкнутые системы управления – используют информацию о результатах управления и формируют управляющее воздействие в зависимости от того, насколько достигается цель управления, в этих системах объект и элементы системы управления образуютконтур управления (см. схему соединения обратной связью).
Исследование изменений частотных характеристик звеньев
Если задана передаточная Функция W(S), то путём подставки S=jw получаем частотную передаточную функцию W(jw), которая является комплексным выражением т.е.
![]() ,
,
А(w) – вещественная составляющая
К(w) – мнимая составляющая.
Частотная передаточная функция может быть представлена в показательной форме:
![]()
где ![]() – модуль;
– модуль;
![]() – аргумент частотной передаточной функции.
– аргумент частотной передаточной функции.
Функция М(w), представленная при изменении частоты от 0 до ¥ получило название амплитудной частотной характеристики (АЧХ).
Функция j(w), представленная при изменении частоты от 0 до ¥ называется фазовой частотной характеристикой (ФЧХ). Для анализа поведения системы в большом диапазоне частот удобно в качестве аргумента частотных характеристик рассматривать не частоту ω, а ее десятичный логарифм ω 10 log.
Порядок выполнения работы
Интегрирующее звено
– дифференциальное уравнение:![]()
– переходная функция:![]()
– передаточная функция: ![]()
Обратная связь интегратора

Апериодическое звено
– дифференциальное уравнение:T
![]() +
y
=
k
u
+
y
=
k
u
– переходная функция: 
– передаточная функция: ![]()
Обратная связь апериодического звена
Колебательное звено
– дифференциальное уравнение: T
2 ![]() + 2
d
T
+ 2
d
T![]() +
y
=
k
u
+
y
=
k
u
– передаточная функция: ![]()
Обратная связь колебательного звена
Расчёт частотных характеристик звеньев
1. Интегрирующее звено
![]()
![]() k=3
k=3
![]()
![]()
Т.к. действительная часть =0, то ![]() считаем
считаем
Угол будет = -![]()

2. Апериодическое звено
![]()
![]()
![]()

3. Колебательное звено
![]()
![]()
![]()
![]()
=![]()

![]()

Обратная отрицательная связь апериодического звена
![]()
В данной лабораторной работе было исследовано изменение динамических характеристик типовых звеньев системы автоматического управления (САУ) при охвате обратной связью. Для исследования динамических характеристик, были использованы входные параметры звеньев из лабораторной работы №1.
1) АЧХ интегрирующего звена убывает, а ФЧХ постоянно.
2) ФЧХ апериодического звена убывает, имея пик приблизительно в ![]() , АЧХ вначале постоянно, затем начинает убывать со значения
, АЧХ вначале постоянно, затем начинает убывать со значения ![]() .
.
3) АЧХ колебательного звена падает с ![]() , ФЧХ имеет пик убывания в значении
, ФЧХ имеет пик убывания в значении ![]() .
.
Для защиты я построил в VISSIM схему обратной связи интегратора с апериодическим звеном, рассчитал для этой схемы АЧХ и ФЧХ, по полученным данным построил графики в EXCEL. Графики EXCEL и VISSIM сошлись, следовательно, обратная связь посчитана верно.