| Скачать .docx |
Дипломная работа: Блок управления и контроля автоматизированного тестера параметров радиоэлементов
Введение
Включение электронных вычислительных машин (ЭВМ) в цикл проектирования радиоэлектронной аппаратуры (РЭА) выдвинуло на передний план задачи математического описания радиоэлементов (РЭ), составляющих эти РЭА, так как достоверность машинных расчетов параметров РЭА определяется, в первую очередь, достоверностью описания параметров РЭ. Комплексный характер работ в области моделирования РЭА наиболее полно сформулирован Логаном /1/, который связал неудачные попытки использования систем автоматизированного проектирования электронной аппаратуры (САПР РЭА) с системным подходом. Такой подход включает:
− разработку математических моделей радиоэлементов;
− проверку адекватности путем сравнения результатов, с характеристиками реализованных устройств радиоэлементов САПР РЭА;
− определение и описание технологических разбросов;
− оценку влияния изменений окружающей среды (температура, влажность, механические воздействия, радиация и т.п.);
− исследование эффектов старения с точки зрения надежности.
Если же при тщательном исследовании пренебрегают хотя бы одним из выше перечисленных аспектов с целью упрощения модели РЭА, то результат моделирования может быть сведён на нет. Например, при оптимизации без учёта климатических факторов или статических параметров.
Исторически потребность математического описания РЭА возникла одновременно с применением РЭА. Современные требования к описанию РЭА отличаются только в существенном повышении требований к адекватности моделей, что связано, в первую очередь, с усложнением функционального назначения и структуры РЭА.
Относительно простые по структуре РЭА и составляющие их РЭ позволяли разработчикам после несложных расчетов проверять результаты посредством натурного макетирования. Это привело к тому, что описание моделей РЭ было также ориентировано на корректировку их параметров в процессе проектирования РЭА. При необходимости простые модели и процессе проектирования усложнялись, если в этом возникала такая потребность.
Усложнение РЭА, связанное с применением полупроводниковых элементов (ПЭ), особенно с началом развития микроэлектронных радиоэлементов (МРЭ), привело, во-первых, к повышению требований к описанию РЭ и МРЭ, во-вторых, к глобальному усложнению РЭА, в-третьих, к резкому ограничению, вплоть до полного исключения натурного макетирования.
Развитие ЭВМ и измерительной техники, широкое внедрение персональных компьютеров (ПК), открыло качественно новые возможности в области САПР РЭА, в том числе и области моделирования РЭ и МРЭ. В практику внедрены:
− мощные методы САПР РЭА, например система Pspice /2/;
− модели РЭ и МРЭ, позволяющие производить адекватное описание характеристик реальных устройств;
− автоматизированные технические средства измерения (АТСИ) на базе ПК, применение которых позволяет идентифицировать параметры модели РЭА в ограниченное время с требуемой точностью.
Анализ как структуры принятых моделей РЭ и МРЭ, так и принятых методов измерения их параметров приходит к следующим выводам:
− повышение точности связано с усложнением структуры моделей, что в большинстве случаев для их эффективного практического использования приводит к их усечению (упрощению), например, модель биполярного транзистора, содержащая до 59 компонентов (модель Гуммеля-Пунна) упрощается до 12 компонентов (классическая модель Эберса-Молла);
− возникают естественные трудности аттестации сложных моделей (увеличение числа параметров приводит к увеличению времени и расходов на моделирование).
Разработчики САПР РЭА PSpice чётко представляют эти проблемы. В этой связи в системе PSpice предусмотрено применение проблемно ориентированных макромоделей. Эти модели, в том числе и транзистора, по желанию пользователя, путём ограничения области определения параметров по режиму электропитания, по постоянному току, частотному диапазону, температуре и другим условиям позволяют в конечном итоге повысить эффективность проектирования за счёт, во-первых, уменьшения числа параметров, во-вторых, резкого снижения количества расчётных операций, выполняемых в процессе расчета РЭА. Так, при использовании в PSpice встроенной малосигнальной модели биполярного транзистора (БТ) число необходимых параметров находится в пределах от 29 (модель Эберса-Молла в версии Логана) до 59 (модель Гуммеля-Пунна), тогда как использование в фиксированном режиме электропитания по постоянному току и ограниченном диапазоне частот макромодель БТ на основе Y- матрицы будет содержать 8´Nj вещественных параметров, где Nj - число аттестуемых частотных точек. При этом определение параметров БТ на текущей частоте производится посредством элементарных вычислительных операций.
Если макромодель БТ определена по данным встроенной глобальной модели БТ, то её точность будет определена точностью исходной модели. Использование косвенных методов идентификации параметров встроенной модели неизбежно приводит к снижению точности моделирования.
Задачу по повышению точности моделирования можно решить, например, путём использования прямых методов применения Y- матрицы транзистора. Современные измерительные приборы позволяют реализовать данные измерения только в первом приближении, так прямое измерение малосигнальных параметров "чёрного ящика" производят, как правило, в коаксиальном тракте с волновым сопротивлением 50 Ом. неизбежны существенные погрешности измерения параметров компонентов значительно отличаются от 50 Ом.
Основными препятствиями для осуществления эффективного измерения параметров малосигнальных макромоделей являются:
− необходимость выполнения сложных с технической точки зрения операций по согласованию измерительных цепей на предмет отсутствия отражённых волн;
− ошибки, связанные с использованием направленных ответвителей, которые нужно рассматривать как дополнительные неоднородности измерительного тракта, причём частотно-зависимые.
Недостатками применяемых измерительных приборов также является противоречия, связанные с внедрением классических "ручных" методов измерения в практику автоматизированных измерений. Эта проблема может быть решена путём разработки и внедрения алгоритмических машинно-ориентированных методов измерения.
В организационно-экономической части рассмотрены вопросы определения трудоёмкости ОКР, договорной цены темы; проведено технико-экономическое обоснование новой конструкции; рассчитана точка безубыточного объёма.
В разделе безопасности жизнедеятельности рассмотрены требования к помещениям, в которых ведётся работа на персональных компьютерах (ПК); вопросы безопасности при непосредственной работе на ПК; уделено внимание вопросам электробезопасности и пожарной безопасности.
Авторами были непосредственно написаны следующие пункты и подпункты:
Маликовым А.Н. - п.1; п.п.2.1; п.п.2.2; п.п.2.2; п.п.2.3; п.п.3.4.1; п.п.3.4.2;
п.п.3.4.3; п.п.3.5; п.п.4.1; п.п.4.2; п.п.5.2; п.п.6.2.7; п.п.6.2.8;
п.п.6.2.9; п.п.6.2.10; п.п.6.2.11; п.п.6.2.12; п.п.6.2.13;
п.п.6.3; п.п.7.1; п.п.7.3; п.п.7.4; п.п.7.5; п.п.8.1;
Казьминым Д.Ю. - п.1; п.п.2.4; п.п.2.5.1; п.п.2.5.2; п.п.2.5.3; п.п.3.1.1;
п.п.3.1.2; п.п.3.2; п.п.3.3; п.п.4.3; п.п.5.1; п.п.6.1.1; п.п.6.1.2;
п.п.6.1.3; п.п.6.2.1; п.п.6.2.2; п.п.6.2.3; п.п.6.2.4; п.п.6.2.5;
п.п.6.2.6; п.п.7.2.1; п.п.7.2.2; п.п.7.2.3; п.п.7.2.4; п.п.8.2;
1. Анализ технического задания
Техническое задание (ТЗ) приведено в приложении 1.
Из принципиальных схем плат непосредственно следует, что они представляют собой относительно простые устройства, так что особых сложностей при разработке этих плат не представляется.
Из литературных данных /5/ следует, что диапазон регулировки тока и напряжения коллектора, а также п.2.2 технического задания вполне реализуемы.
Устройство предназначено для работы в стационарных лабораторных условиях, поэтому особые меры для повышения устойчивости к внешним воздействиям не применяются, так же отсутствуют жёсткие требования по массе и габаритам, что позволяет не проводить дополнительные мероприятия по их уменьшению. Условия эксплуатации согласно первой группе ГОСТ 16019-78 предусматривают работу устройства в стационарной аппаратуре в отапливаемом помещении. Для аппаратуры данной группы определены основные дестабилизирующие факторы согласно /16/:
воздействие минимальной пониженной температуры 2330 К;
воздействие максимальной пониженной температуры 2780 К;
воздействие минимальной повышенной температуры 3130 К;
воздействие максимальной повышенной температуры 3280 К;
воздействие повышенной влажности 80% при температуре 2980 К;
воздействие пониженного атмосферного давления 61 кПа при температуре 2630 К;
прочность при синусоидальных вибрациях с частотой 20 Гц и ускорением 19,6 м/с2 в течение времени непрерывного воздействия более 0,5 ч.
При анализе приведённых факторов можно сделать вывод о возможности не предпринимать специальных мер по защите от дестабилизирующих влияний этих воздействий.
Согласно ТЗ основанием плат является кассета корзины базы 2 ВНИИТ г. С-Петербург. Предварительные исследования приводят к выводу о возможности размещения всего устройства на одной плате.
Так как устройство должно отвечать технологии единичного производства, то в нем должны быть использованы серийные и доступные радиоэлементы, а так же традиционные конструкционные материалы. Жёстких требований к ним в связи с нежёсткими условиями эксплуатациями не представляется. Требования к эргономике обычные и связаны только с удобством эксплуатации блока. Требования к надёжности тоже являются обычными для такого вида аппаратуры.
Из изложенного выше следует, что реализация конструкции не связана с какими-либо существенными трудностями.
2. Математические модели радиоэлектронных элементов
2.1 Формальная модель многополюсного радиоэлемента
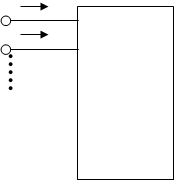
Формальную модель многополюсного радиоэлемента (ФММР) представим в виде многополюсника (МП) который содержит множество N внешних полюсов для его электропитания по переменному и постоянному току. В качестве переменных, которые определяют процессы в ФММР, примем входные токи полюсов i1 , i2 …in разности потенциалов ji -jl =Uil (i¹l) и дополнительные переменные x1 ,x2 …xq , jl - потенциал базового полюса, относительно которого отсчитывается напряжение Uil , ji – потенциалы остальных полюсов (рисунок 2.1).
|
![]()
 |
![]()
![]()
![]()
 |
Рисунок 2.1 - Графическое представление ФММР
В общем случае процессы в формальном многополюснике (ФМП) можно представить нелинейными дифференциальными уравнениями вида
(2.1)
(2.2)
(2.3)
 |
где I, U - вектор–функции определяемые токами и напряжениями
на полюсах;
Fi и fp – некоторые функции, в общем случае нелинейные;
Х - вектор-функция времени с составляющими х1 ,х2 ,…хq , которые
связаны с различными физическими величинами в зависимости от
принципов построения модели.
2.2 Структура ФММР
Кроме множества N полюсов, структуру ФММР представляют под множество А полюсов для электропитания по переменному току в процессе преобразования сигналов и под множество S полюсов для электропитания МП по постоянному току для создания рабочего режима.
Связь между множествами A, S и N определяет выражение
А £ N, S £ N. (2.4)
![]()
![]() Пусть а- размер А, а bi
– его элемент при i=1,a , s-размер S, Сj
- его элемент при j=1,s.
Пусть а- размер А, а bi
– его элемент при i=1,a , s-размер S, Сj
- его элемент при j=1,s.
В случае ФМП множество полюсов N представляет собой объединение полюсов A и S, т.е.
N=AUS. (2.5)
При этом возможны следующие отношения между A, S и N.
Для пассивных устройств
S=0, A=N. (2.6)
Для устройств постоянного тока, для которых мгновенными измерениями сигналов во времени можно пренебречь
A=0, S=N. (2.7)
Подмножества A и S совпадают (например для транзистора)
A=S=N. (2.8)
Для устройств типа операционного усилителя
AÌS=N. (2.9)
Полюса А и S изолированы друг от друга (некоторые интегральные схемы)
AÌS, N=A+S. (2.10)
Условия (2.6)-(2.10) необходимо учитывать как при конкретном применении МП, так и при организации процесса измерения его параметров.
2.3 Базовый узел ФММР
В качестве базового узла ФММР можно выбрать любой из его полюсов и даже объединить несколько полюсов. В этом случае порядок МП понизится на число полюсов принятых в качестве базовых, и его модель принципиально упростится.
С другой стороны базовый узел может быть внешним по отношению к МП, т.е. электрически с МП не связан. В этом случае первый закон Кирхгофа для мгновенных токов, втекающих в N-полюсник, может быть записан в виде
|
А линейные устройства будут иметь особенные матрицы параметров, т.е. сумма элементов этих матриц по строкам и столбцам будет равна 0.
В этой связи для описания ФММР достаточно идентифицировать N-1 строк и столбцов.
2.4 Структура элементной базы
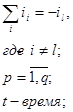
Структура элементной базы РЭА приведена на рисунке 2.2.
Согласно рисунку 2.2 элементная база (ЭБ) подразделяется на двухполюсники (ДП) и многополюсники (МП). Считаем необходимым выделить ДП в отдельное подмножество в виду их исключительного значения в качестве компонент, на основе которых конструируется более сложные по структуре и назначению компоненты, в том числе и МП. ДП и МП в свою очередь подразделяются на пассивные (ПЭ) и активные (АЭ) элементы. АЭ отличаются от ПЭ тем, что режим их функционирования обязательно определяют дополнительные факторы, например, токи напряжения смещения рабочей точки. Подклассами П и А являются элементы: дискретные элементы (Д)- элементы со сосредоточенными постоянными параметрами, относительно простой конструкции и принципа действия (резисторы, конденсаторы, транзисторы и т.п. ); с распределенными параметрами (РП); акустоэлектронные элементы (АЭ); функциональные элементы (ФЭ); интегральные схемы (ИС); цифровые элементы (ЦЭ). По существу, подклассы элементов, определяющих структуру АЭ и ПЭ, совпадают за исключением ЦЭ, которые являются особым подклассом активных элементов, элементарных логических ИС до сложнейших микропроцессорных устройств.
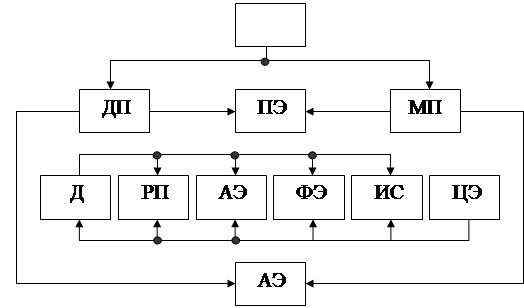 |
Рисунок 2.2 - Структура элементной базы РЭА.
2.5 Модели РЭ для САПР электронных схем
2.5.1 Встроенные модели
В современных САПР электронных схем, например, PSpice широко используются встроенные модели. В системе PSpice в состав этих моделей входят модели диода, биполярного транзистора, канального полевого транзистора, МОП-транзистора и магнитного сердечника. Указанные модели позволяют рассчитывать статические линейные и нелинейные динамические режимы. В основу моделей диодов и транзисторов положены идеи выдвинутые Эберсом и Моллом. В этих моделях отражены достижения последних десятилетий.
К достоинствам встроенных моделей можно отнести:
− элементы, указанные выше, можно аттестовать по справочным данным;
− в зависимости от решаемой задачи можно определить уровень сложности моделей, тем самым оптимизируя процесс вычисления;
− для МОП транзистора предлагается 4 уровня сложности, а для биполярного транзистора 3, кроме моделей Гуммеля-Пунна аттестуемой 59 параметрами и константами.
Также предусмотрены усеченное использование моделей Эберса-Молла на основе 16-20 параметров, предоставление пользователю корректировки встроенных моделей.
К недостаткам встроенных моделей, приведенных в литературе /2/ следует отнести их сложность. Анализ показывает, что для расчета малосигнальной модели биполярного транзистора требуется использовать практически весь математический аппарат нелинейного варианта его модели.
Также к недостаткам следует отнести ограниченный частотный диапазон. По данным /2/ частотный диапазон биполярного транзистора ограничен 100 МГц. Отсутствие достаточного объема справочной информации и связанной с этим необходимость организации сбора дополнительной информации, путем реализации дополнительных измерительных процессов.
2.5.2 Макромодели
В САПР высокого уровня (например, PSpice) предусмотрено использование макромоделей ряда элементов (операционные усилители, компараторы напряжения, СВЧ транзисторы, нелинейные резисторы, конденсаторы и т.п.) идентификация параметров которых производится пользователем. Успех моделирования в этом случае определяют методы и условия измерения. Пользователю предоставляется возможность идентификации параметров модели в условиях, наиболее приближенному к реальному использованию. Так встроенные модели в библиотеке PSpice адекватны на частотах только до 100 МГц, то макромодели, в том числе малосигнальные модели имеют большое значение при расчетах электронных схем СВЧ диапазона. Также представляют большой практический интерес методы измерения параметров этих моделей.
Второй способ построения высокочастотных моделей транзисторов основан на применении их малосигнальных схем замещения. В таком случае сначала с помощью типовых моделей транзисторов рассчитывается режим цепи по постоянному току и для этого режима измеряются, или рассчитываются, Y– или S–параметры транзисторов в заданном диапазоне частот. Рассмотрим эти схемы замещения для программы PSpice подробнее.
Макромодель на основе Y–параметров. Напомним уравнение линейного 4-полюсника (рисунке 2.3) в системе Y–параметров
![]() (2.12)
(2.12)
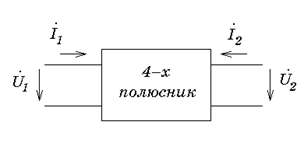
Рисунок. 2.3 - Линейный 4-полюсник
Этой системе уравнений поставим в соответствие схему замещения транзистора на основе ИТУН (рисунок 2.4).
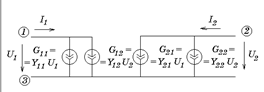
Рисунок 2.4 - Макромодель транзистора на основе Y–параметров
Приведем пример формальной макромодели транзистора КТ315В на основе Y–параметров, измеренных на частотах 5, 10 и 30 МГц для тока коллектора Iк =5 мА:
.subckt KT315V 2 1 3
G11 1 3 FREQ {V(1,3)}=
+ ( 5e6, -50.3, 31.6) (10e6, -48.0, 36.9) (30e6, -44.3, 41.0)
G12 1 3 FREQ {V(2,3)}=
+ ( 5e6, -78.4, 181.9) (10e6, -72.7, 184.5) (30e6, -63.1, 183.7)
G21 2 3 FREQ {V(1,3)}=
+ ( 5e6, -18.7, -20.8) (10e6, -20.0, -31.9) (30e6, -25.5, -44.2)
G22 2 3 FREQ {V(2,3)}=
+ ( 5e6, -67.4, 63.4) (10e6, -63.3, 56.3) (30e6, -59.4, 54.1)
.ends
При табличном задании управляемых источников в частотной области для каждого значения частоты указывается модуль передаточной функции в децибелах и ее фаза в градусах.
Макромодель на основе S–параметров. В диапазоне СВЧ большее распространение имеют линейные макромодели транзисторов на основе S–параметров, которые в этом диапазоне частот проще измерять, чем Y–параметры. Напомним, что для 4-полюсника на рисунке 2.3 справедливо следующее уравнение в терминах S–параметров:
![]() , (2.13)
, (2.13)
где ![]() – падающие и отраженные волны мощности;
– падающие и отраженные волны мощности;
Z![]() – волновое сопротивление тракта, в котором измерены S–параметры транзистора.
– волновое сопротивление тракта, в котором измерены S–параметры транзистора.
Из этих соотношений вытекают уравнения для входного и выходного напряжений, в которые входят управляемые источники напряжения:
![]() , (2.14)
, (2.14)
где ![]()
На основе этой системы уравнений составляется линеаризованная схема замещения СВЧ–транзистора (рисунок 2.5). В качестве примера приведем описание макромодели арсенид-галлиевого полевого транзистора 3П343 в диапазоне частот 4...12 ГГц при напряжении затвора 2 В и токе стока 10 мА:
.subckt 3P343 2 1 3
RZ1 1 11 50
RZ2 2 21 50
E11 11 12 FREQ {V(1,3)+V(1,11)} =
+ (4e9, -0.35, -28.3) (5e9, -0.54, -33.2) (6e9, -0.58, -35.9)
+ (7e9, -1.21, -41.9) (8e9, -1.01, -67.1) (9e9, -2.85, -56.9)
+ (10e9, -4.29, -32.8) (11e9, -1.94, -56.9) (12e9, -0.63, -65.2)
E12 12 3 FREQ {V(2,3)+V(2,21)}=
+ (4e9, -32.5, 77.0) (5e9, -29.5, 62.0) (6e9, -29.2, 72.4)
+ (7e9, -27.3, 65.0) (8e9, -23.5, 15.0) (9e9, -29.0, 66.1)
+ (10e9, -23.4, 36.6) (11e9, -25.4, 61.7) (12e9, -22.1, 40.4)
E21 21 22 FREQ {V(1,3)+V(1,11)}=
+ (4e9, 0.82, 149.8) (5e9, 2.30, 131.1) (6e9, 0.74, 134.3)
+ (7e9, 1.26, 129.0) (8e9, 0.43, 105.5) (9e9, 0.11, 123.2)
+ (10e9, 3.92, 87.5) (11e9, 2.40, 110.1) (12e9, 4.10, 85.0)
E22 22 3 FREQ {V(2,3)+V(2,21)}=
+ (4e9, -2.16, -26.4) (5e9, -1.21, -49.1) (6e9, -2.27, -45.1)
+ (7e9, -2.21, -34.4) (8e9, -2.62, -54.5) (9e9, -2.73, -52.7)
+ (10e9, -3.74, -17.2) (11e9, -3.48, -65.1) (12e9, -4.44, -62.4)
.ends
|
|
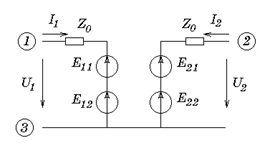
Рисунок 2.5 - Макромодель транзистора на основе S–параметров
2.5.3 Факторные модели
Под факторной моделью будим понимать аналитическую макромодель, сформированную по результатам измерения параметров РЭ в процессе реализации активного факторного эксперимента. Каждый параметр в этом случае может быть выражен полиноминально
|
или мультипликативно
|
где
Gi - аттестуемый параметр;
pi - постоянная факторного уравнения;
gij - парциальное факторное уравнение, представляющее аналитическую
зависимость от j фактора;
xj – фактор представляющий функцию gij.
Таким способом могут быть аттестованы как статические параметры, например в виде вольт-амперных характеристик (ВАХ), так и динамические параметры, например в виде Y-параметров. В первую очередь факторное пространство определяет частотный диапазон, режим электропитания по постоянному току и температура. Могут быть добавлены и другие факторы, способные влиять на значение параметров модели.
В общем виде факторная модель может быть выражена двумя уравнениями. Уравнение ВАХ
I=I(X) (2.17)
и уравнением
Y=Y(w,X) (2.18)
где I – вектор токов, определяющих рабочую точку;
Х – вектор факторов за исключением частоты;
Y – матрица проводимостей;
w - угловая частота.
Каждую из вещественных составляющих уравнений (2.17) и (2.18) определяют в виде аналитических зависимостей (2.15) или (2.16).
Факторная модель наиболее полно отвечает аналитическим макромоделям, описание которых приведено в п. 2.5.2. Измерение статических и физических параметров факторных моделей может быть автоматизировано при использовании способа по АС СССР № 1317370 /3/ устройств по АС СССР №1084709 /5/. Способ /3/ и устройства /6,7/ не имеет принципиальных отличий по частотному диапазону и могут быть применены в СВЧ диапазоне. Использование этих устройств при применениях к СВЧ имеет определенные преимущества, т.к. для реализации основных измерительных операций не обязательно применение согласованного волнового тракта. Однако и в этом случае при конструировании измерительных цепей, которые содержат ИГ необходимо учитывать специфику цепей СВЧ диапазона.
Информация, представленная уравнениями (2.17) и (2.18) в принципе достаточна для описания макромоделей, приведенных в /8/. Например, для идентификации модели Эберса-Молла нужно расширить систему (2.17) и (2.18) добавив данные об инверсном режиме включения транзистора. При этом уравнение (2.18) используется для определения нелинейных зависимостей емкостей переходов транзистора.
3 Тестер для измерения параметров радиоэлектронных элементов
3.1 Методика измерения
3.1.1 Измерение статических параметров
В интегрированных САПР для расчета транзисторных схем в режиме большого сигнала, как правило, используют модели Эберса-Молла или Гуммеля-Пуна, основанные на суперпозиции прямого и инверсного включения транзистора /2,10/. В этом случае неизбежны искажения моделируемых вольтамперных характеристик (ВАХ), так как в основе их описания заложены свойства идеального p-n перехода, смещенного в прямом или обратном направлении.
В этой связи классическое определение ВАХ связанное с непосредственным измерением токов и напряжений на входных и выходных электродах транзистора имеет принципиальное значение как для корректировки указанных выше моделей, так и для изучения тонкой структуры процессов в транзисторе /11-13/.
В процессе планирования эксперимента при моделировании радиоэлементов важную роль имеет выбор непосредственно измеряемой системы параметров с точки зрения совместимости с требованиями к определяемой модели, методам и техническим средствам измерения в первую очередь должны быть реализованы два главных условия, во-первых, сокращение времени и материальных затрат на этапе сбора и обработки первичной информации, во-вторых, широкое использование алгоритмических методов измерения, позволяющих при реализации простых методов измерения получить сложные модели путем глубокой математической обработки информации.
Измерение ВАХ транзистора можно комплексно автоматизировать использовав методику измерения по А.С. СССР №1084709 /13/. При этом предоставляется возможным в процессе измерения ВАХ так же определять данные, достаточные для вычисления Y-параметров транзистора в каждой из точек спектра плана эксперимента, который реализуется в процессе измерения ВАХ. При этом аттестируется система ВАХ
|
Uб =Uб (Ik ,Uk ),
где Iб и Uб – ток и напряжения базы транзистора соответственно;
Ik и Uk – ток и напряжение его коллектора.
При расчетах электронных устройств система практически не используется, однако при определении ее параметров относительно просто автоматизировать измерительный процесс и совместить определение статистических и динамических параметров на одной технологической установке 15.
Расширяя факторные пространства в температурную область из системы (3.1) получаем систему
Iб = Iб (Iк ,Uк ,To ); (3.2)
Uб = Uб (Iк ,Uк ,To ), (3.3)
где To – температура.
На практике наиболее широко используют ВАХ соответствующие системам Н-параметров (параметры ВАХ ток Iб и напряжение Uк ) или Y-параметров (аргументы ВАХ напряжения Uб и Uк ), т.е. системы
Iк = Iк (Iб ,Uк ); (3.4)
Uб = Uб (Iб ,Uк ), (3.5)
Iк = Iк (Uб ,Uк ); (3.6)
Iб = Iб (Uб ,Uк ). (3.7)
Если базовая система (3.1) соответствует полиминальной модели, то ее факторные функции (ФФ) имеют вид /5,14/
Iб = k1 + Iб (Iк ) + Iб (Uк ); (3.8)
Uб =k2 + Uб (Iк ) + Uб (Uк ), (3.9)
где k1 и k2 – постоянные факторных функций (ПФФ), а индексы 1 и 2 указывают на различие этих коэффициентов в первом и втором уравнениях системы; Iб (Iк ), Iб (Uк ), Uб (Iк ), Uб (Uк ) - аналитические функции, представляющие собой элементарные факторные функции (ЭФФ).
Iк = k1 + Iк (Iб ) + Iк (Uк ); (3.10)
Uб =k2 + Uб (Iб ) + Uб (Uк ) (3.11)
Iк = k1 + Iк (Iб ) + Iк (Uк ); (3.12)
Iб =k2 + Iб (Uб ) + Uб (Uк ). (3.13)
Преобразования параметров ФФ (3.8)-(3.9) в ФФ (3.10)-(3.11) или (3.13)-(3.14) было предложено производить по табличным значениям ЭФФ системы (3.8)-(3.9).
Определение ЭФФ Iк (Iб ) и Uк (Uб ) не представляет сложности, так как они представляют собой обратные функции ЭФФ Iб (Iк ) и Uб (Uк ). Для определения ЭФФ Uб (Iб ) можно использовать ЭФФ Uб (Iк ) в которую нужно подставить табличные значения ЭФФ Iк (Iб ). Таким же способом по ЭФФ Uб (Uк ) и Iк (Iб ) находим ЭФФ Iк (Uб (Uк )) и на последнем этапе ЭФФ Iб (Uб ) определяем через ЭФФ Iб (Iк ) и Iк (Uб ), т.е. в виде Iб (Iк (Uб )).
Аналитически ЭФФ определены числовым методом трем их табличным значениям.
Каждая из ЭФФ отвечает одному из уравнений, приведенных в таблице 3.1
Таблица 3.1 - Структура ЭФФ
Код |
Структура |
| 1 |
f1 =ax2 +bx+c |
| 2 |
f2 =ln(f1) |
| 3 |
f3 =exp(f1) |
| 4 |
f4 =a/(x+b)+c |
| 5 |
f5 =a; b=c=0 |
Блок схема алгоритма формирования ЭФФ приведена на рисунке 1
Система Системы Система
(10)-(11) (8)-(9) (12)-(13)
![]()
![]()
![]()
![]()
![]()
![]() Iк
(Iб
) Iб
(Uк
) Iб
(Uк
)
Iк
(Iб
) Iб
(Uк
) Iб
(Uк
)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Iк
(Uк
) Iк
(Iб
) Iб
(Iк
) Iб
(Iк
(Iб
)) Iб
(Uб
)
Iк
(Uк
) Iк
(Iб
) Iб
(Iк
) Iб
(Iк
(Iб
)) Iб
(Uб
)
![]()
![]()
![]()
![]()
![]() Uб
(Iб
) Uб
(Iк
(Iб
)) Uб
(Iк
) Iк
(Iб
) Iб
(Uб
)
Uб
(Iб
) Uб
(Iк
(Iб
)) Uб
(Iк
) Iк
(Iб
) Iб
(Uб
)
![]()
![]()
![]() Iб
(Uк
) Uб
(Uк
) Iк
(Uб
(Uк
)) Iк
(Uк
)
Iб
(Uк
) Uб
(Uк
) Iк
(Uб
(Uк
)) Iк
(Uк
)
![]()
![]() Рисунок 1 - Алгоритм преобразования систем ЭФФ
Рисунок 1 - Алгоритм преобразования систем ЭФФ
В результате реализации алгоритма, рисунок 1, находятся ЭФФ преобразованных ВАХ, чтобы определить ФФ этих ВАХ необходимо вычислить соответствующие ПФФ, которые можно вычислить по табличным значениям ФФ. Исходными данными для расчета являются табличные значения ЭФФ.
Рассмотрим алгоритм формирования табличных значений ФФ для плана 34-2 . Пусть fij – элементы ЭФФ, где i=1,4 – индекс фактора, а j=1,3 – индекс уровня фактора. Если принять, что при i=1 фактор изменяется по строкам матрицы планирования (МП), i=2 – по столбцам, i=3 – по диагонали справа-налево и i=4 – по диагонали слева-направо, то обозначив символом ykl элементы МП, где k=1,3 и l=1,3 получим условия для определения системы уравнений, достаточных для определения элементов ykl по известным элементам fij .
Из теории планирования эксперимента известно, что утроенные значения fkl равны сумме элементов yij по фиксированному уровню фактора i.
Тогда для полиминальной модели исходные системы уравнений имеют вид для первого фактора
3f11 =y11 +y12 +y13 ; 3f21 =y21 +y22 +y23 ; 3f23 =y31 +y32 +y33 , (3.14)
для второго фактора
3f21 =y11 +y21 +y31 ; 3f22 =y12 +y22 +y32 ; 3f23 =y13 +y23 +y33 , (3.15)
для третьего фактора
3f31 =y11 +y22 +y33 ; 3f32 =y12 +y23 +y13 ; y33 =y13 +y21 +y32 , (3.16)
и для четвертого фактора
3f41 =y31 +y22 +y13 ; y42 =y11 +y23 +y32 ; y21 =y12 +y33 . (3.17)
Алгоритм определения преобразованной МП по табличным значениям ЭФФ сводится к вычислению этих yij этой МП по формулам, полученным в результате совместного решения систем (3.14)-(3.17):
y31 =f41 + f21 + f32 - f11 - f12 ; (3.18)
y32 =f33 + f42 + f22 - f11 - f12 ; (3.19)
y21 =f33 + f21 + f24 - f11 - f13 ; (3.20)
y13 =3f33 - y21 - y32 ; (3.21)
y12 =3f22 - 3f41 - y32 + y13 + y31 ; (3.22)
y23 =3f32 – y12 - y31 ; (3.23)
y11 =3f11 – y12 – y13 ; (3.24)
y22 =3f12 - y21 - y32 ; (3.25)
y33 =3f13 – y31 - y32. (3.26)
При полиминальной модели (ФФ представляет собой произведение ЭФФ) также используют формулы (3.18)-(3.26), но для логарифмированных табличных значений ФФ.
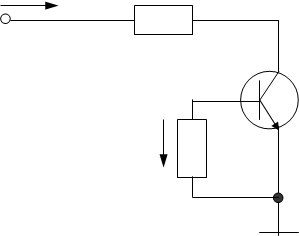
Для аттестации параметров модели Эберса-Молла необходимо определить уравнения (2.18) для инверсного включения транзистора. Дополнительные данные для определения этой модели или ее корректировки могут быть получены при определении переходов база-эммитер и база-коллектор согласно схемам, рисунки 3.2 и 3.3.
![]()
![]()
 |
||
![]()
![]()
![]()
![]()
Рисунок 3.2 - Измерение ВАХ в нормальном режиме
 |
||
|
|
|
|
|
|
Рисунок 3.3 - Измерение ВАХ в инверсном режиме.
 |
Регистрируются напряжения Uк , Uб , которые падают на образцовых резисторах R0k , R0б . Соответственно токи Iк , Iб рассчитываются по формулам.
|
|
Ток Ik служит для контроля режима измерения, если электропитание проводится от источника тока.
В процессе реализации измерительного процесса необходимо руководствоваться сведениями о структуре РЭ, приведенными в п. 2.2-2.3.
3.1.2 Измерение динамических параметров
Рассмотрим условия реализации принятого машинно-ориентированного способа измерения линейных параметров многополюсника.
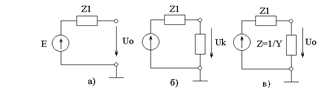
Согласно этому способу, сущность которого приведена в работах /9/, для определения Y-матрицы многополюсника необходимо выполнить измерение матрицы Uo напряжений холостого хода согласно схеме, рисунок 3.4а, на которой изображены: источник синусоидального напряжения Ei, многополюсник эквивалентный паразитным параметрам измерительной цепи с матрицей проводимости Yo. Источник Ei подключен к i-му входу-полюсу через комплексное сопротивление Zi, а остальные полюсы-входы нагружены на комплексные сопротивления Zj (j=1).
Индексами i и j обозначены точки подключения измерительного прибора, а именно пробник измерительного канала векторного вольтметра.
Согласно рисунку 3.4а при отсутствии измеряемого многополюсника (ИМП) и поочередном подключении последовательно к каждому резистору Zi источника Ei измеряют диагональные Uii и недиагональные Uoji компоненты матрицы Uo. Затем при поочередном подключении образцовой Yoi меры последовательно к каждому источнику Ei с внутренним сопротивлением Zi (рисунок 3.5б) измеряют напряжение Uoi - элемент вектора калибровочных напряжений Uk. Операции измерений матрицы Uo и вектора Uk опорных и калибровочных напряжений осуществляется n`+n раз, где n- число активных входов многополюсника по переменному току. На этом процесс калибровки измерительной схемы завершается. В результате определяется информация достаточная для учета влияния паразитных параметров эквивалентного многополюсника Yo.
Рабочий цикл измерения производится согласно рисунку 3.5. В этом случае параллельно схеме рисунок 3.5а подключают измеряемый многополюсник с матрицей проводимости Yo. В результате измерительные цепи оказываются нагруженными эквивалентным многополюсником с матрицей проводимости Yo, которую можно рассчитать по формуле
Yo = Y + Yo . (3.29)
Затем производится измерение элементов Uji матрицы U нагруженного режима таким же способом, как и измерение элементов матрицы Uo опорных напряжений. Переключение источника Ei производится n раз и определяются n` напряжений.
Измерение параметров многополюсника
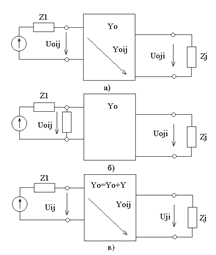
а - измерение элементов матрицы Uo опорных напряжений;
б - измерение элементов вектора Uk калибровочных напряжений;
в - измерение элементов матрицы и нагруженного режима
Рисунок 3.4 - Измерение параметров многополюсника
Элементы матрицы Uo, U и вектора Uk используются для расчета матриц передачи Ко холостого хода и К нагруженного режима.
Элемент матрицы Ко рассчитывают по формуле
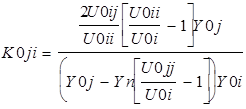 , (3.30)
, (3.30)
а элемент матрицы К - по формуле
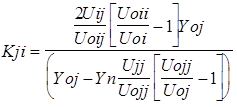 , (3.31)
, (3.31)
где Yп - полная проводимость входной цепи пробника измерительного
канала векторного вольтметра.
В работе /1/ показано, что Y- матрица измеряемого многополюсника может быть определена в результате решения матричного уравнения
Y = 2(K-1 – Ko-1 ), (3.32)
где -1 - знак обращения матриц К и Ко.
Для случая двухполюсника
n = 1 (3.33)
имеем
i = 1; j = 0. (3.34)
Очевидно, что при условиях (3.33), (3.34) имеем:
коэффициенты матриц Ко и К с индексами j не имеют смысла;
− всего аттестуются один коэффициент по формуле (3.30) и один коэффициент по формуле (3.31);
− индекс i не имеет смысла, так как n = 1, матричное уравнение (3.32) превращается в простое алгебраическое;
− для определения полной проводимости Y двухполюсника достаточно выполнить согласно рисунку 3.5 измерение трех напряжений: Uo холостого хода (рисунок 3.5а), Uk калибровки (рисунок 3.5б) и U нагруженного режима (рисунок 3.5в).
С учетом (3.32) - (3.33) и отмеченных замечаний из формул (3.30) - (3.31) приходим к формулам
 , (3.35)
, (3.35)
а - измерение напряжения Uo холостого хода;
б - измерение напряжения Uk калибровки при нагрузке схемы образцовой
мерой Yk;
в - измерение напряжения U при нагрузке схемы измеряемым
двухполюсником Y
Рисунок 3.5 - Измерение двухполюсника
 , (3.36)
, (3.36)
Подставляя коэффициенты Ко и К в уравнение (3.32) с учетом замечания (3.33) получаем формулу для расчета аттестуемой проводимости Y.
 , (3.37)
, (3.37)
Таким образом, для определения полной проводимости (сопротивления) двухполюсника достаточно выполнить измерения трех напряжений согласно схемам (рисунок 3.5). При этом справедливы следующие условия:
− измерительный процесс легко автоматизировать, так как при его
реализации не требуется производить подстроечные операции;
− из трех тестов два (при регистрации напряжений Uo и Uk) являются калибровочными и при массовых измерениях на фиксированной частоте производятся только один раз;
− при выполнении предыдущего условия процесс измерения сводится к регистрации одного напряжения U с последующим расчетом по формуле (3.37);
− при диапазонных измерениях операции по калибровке можно свести к определению четырех вещественных функций, которые определяют модуль напряжения Uo
Uo = Uo(); (3.38)
аргумент напряжения Uo
= ; (3.39)
модуль напряжения Uk
Uk = Uk(); (3.40)
и аргумент напряжения Uk
К = К ; (3.41)
где - угловая частота.
При использовании стабильной измерительной аппаратуры операции по определению функций (3.38) - (3.40) можно выполнить один раз, так функции (3.36) - (3.37) определяются в режиме холостого хода или при перестановке нагрузки и их зависимость от частоты не будет сложной. В большинстве случаев эти функции можно выразить через уравнения первого или второго порядка. Для их идентификации необходимо выполнить измерения в двух - трех точках заданного частотного диапазона.
Процесс определения АЧХ и ФЧХ двухполюсника может быть сведен к измерению модуля и фазы напряжения U согласно схеме рисунок 3.5в; определения по АЧХ и ФЧХ напряжений Uo и Uk на измеряемой частоте; определение модуля и аргумента проводимости Y на частоте измерения; выполнение аналогичных измерений на всех дискретных точках частотного диапазона, определенных планом эксперимента; вычисление АЧХ и ФЧХ проводимости Y двухполюсника; обработка АЧХ и ФЧХ для определения интересующих пользователя параметров, наблюдения на экране дисплея графиков и т.п.
При реализации измерений согласно принятых методам следует учитывать специфику измерительных цепей, в котором эти измерения проводятся.
3.2 Структурная схема тестера
Структурная схема тестера приведена на рисунке 3.6.
Тестер содержит устройство интерфейса (УИ) и измерительно-контрольное устройство (ИКУ). Блок УИ предназначен для обмена информацией с персональным компьютером (ПК) в процессе управления тестером, обработки сигналов непосредственного управления ИКУ, а также управление приборами, агрегатированными в стойку программированных измерительных приборов (СПИП).
Объект измерения (ОУ) подключается к выходу ИКУ. Сигналы возбуждения ОУ и отклики на них поступают и воспринимаются приборами стойки СПИП через коммутаторы электрических сигналов расположенных в ИКУ.
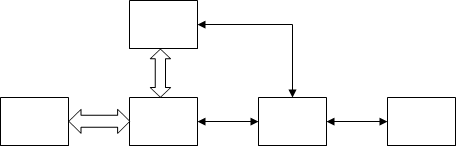
СПИП
ПК УИ ИКУ ОИ
Рисунок 3.6 - Структурная схема тестера
3.3 Устройство интерфейса
Блок УИ сконструирован на основе микропроцессорного устройства, через которое командами с порта COM1 ПК типа IBM PC управляет:
− через первый ЦАП генератором тока в интервале от 1 до 100 мА при измерении транзисторов;
− через второй ЦАП источником опорного напряжения, который служит для регулировки напряжения транзистора;
− через третий ЦАП устройством регулировки температуры.
Управление ЦАП производится через первый – третий регистры. Остальные три регистра предназначены для управления программируемым генератором синусоидальных сигналов (ПГСС), коммутации цепей, контроля статических режимов ОИ, коммутации цепей измерения и контроля динамического режима ОИ.
Регистрация измеряемых сигналов осуществляется АЦП, управление которым осуществляется программно от ПК.
На ИКУ с выходов УИ поступают сигналы постоянного тока, которые определяют режим ОИ и коды управления коммутаторов контроля статического и динамического режимов ОИ.
Полезная информация поступает с выхода ИКУ в виде аналогового сигнала постоянного тока, который преобразуется в цифровой сигнал АЦП и подаётся на ПК для дальнейшей обработки.
3.4 Измерительно-контрольное устройство (ИКУ)
3.4.1 Электрическая схема ИКУ
Схема электрическая соединений ИКУ представлена на МК 3.097.002 Э4. ИКУ составляет собой четыре модуля: измерительная головка (ИГ), модуль А1, плата управления и контроля статическим и динамическим режимами тестера (ПУиК), модуль А2, нагрузка коллекторная, модуль А3, нагрузка базовая, модуль А4.
Устройство ИГ (МК 5.192.006 Э3) представляет собой держатель ОИ, на котором установлены: гнездо для подключения измерительного канала векторного вольтметра (ВВ); контакты для подключения собственно ОИ; вилка разъёма для подключения ИГ к ПУиК. При измерении четырёхполюсных РЭ ИГ содержит реле для подключения ВВ к входу или выходу ОИ.
Электрическая схема ПУиК приведена на МК 5.064.001 Э3.
Плата управления и контроля статическим и динамическим режимами тестера (ПУиК) содержит:
коммутатор контроля динамических и статических контролируемых
сигналов (ККС) на реле К1-К8;
коммутатор динамических режимов (КДР) на реле К9-К12;
розетка разъема Х1 для подключения измерительной головки (ИГ);
розетка разъема Х2 для подключения развязывающих ВЧ усилителей (РУ) ;
розетка разъема Х3 для подключения измерительного усилителя (ИУ);
розетка разъема Х4 для подключения блока стабилизации температуры (БСТ);
розетка разъема Х5 для подключения блока стабилизации режима транзистора (БСР);
резистор R1 для контроля режима базы;
резистор R2 для контроля режима коллектора;
резисторы R3,R4 для согласования цепи ВЧ сигнала;
резисторы R5-R7, R8-R10 и R11-R13 для ослабления сигнала;
конденсаторы С1-С10 для блокировки ВЧ сигналов в цепях питания транзистора по постоянному току;
конденсаторы С11-С12 для разделения цепей питания по переменному и постоянному току;
контакты 1а-24а, 1б-24б, 1с-10с и 1д-10д для подключения платы к внешним устройствам.
Устройство работает следующим образом:
ККС предназначен для измерения модулей сигналов на аналоговых выходах первого и второго векторных вольтметров (ВВ);
измерения разностей фаз на аналоговых выходах первого и второго ВВ;
измерения контроля напряжений Uк , Uб и токов Jк , Jб определяющих рабочую точку транзисторов при измерениях в активном режиме;
измерения напряжений Uб-к ,Uб-э и соответствующих им токов Jк , Jб для аттестации параметров моделей Эберса-Молла;
измерения напряжения Uт для определения температуры окружающей среды.
Состояние реле ККС приведены в таблице 3.2. С помощью КДР реализуются динамические тесты. При этом измеряют комплексные напряжения ![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() холостого хода на базе транзистора, которые используют для калибровки аттенюатора собранного на реле К10-К12.
холостого хода на базе транзистора, которые используют для калибровки аттенюатора собранного на реле К10-К12.
Реле К9 служит для подключения к выходу аттенюаторов. В нормальном положении сигнал подается на базу транзистора, в рабочем состоянии – на коллектор.
В режиме холостого хода измеряют напряжения![]() ,
,![]() ,
,![]() ,
,![]() по которым производится калибровка ИГ.
по которым производится калибровка ИГ.
В процессе измерения транзистор подключают к ИГ и измеряют напряжения![]() ,
,![]() ,
,![]() ,
,![]() .
.
Аттестируемые напряжения снимаются с базовой (![]() ,
,![]() ,
,![]() ,
,![]() ) или с коллекторной (
) или с коллекторной (![]() ,
,![]() ,
,![]() ,
,![]() ) цепи транзистора, путем подключения к этим цепям измерительного канала ВВ с помощью реле, расположенного в ИГ.
) цепи транзистора, путем подключения к этим цепям измерительного канала ВВ с помощью реле, расположенного в ИГ.
Таблица состояния реле К9-К12 представлена в таблице 3.3, в шестой колонке которой показаны состояния реле R1А, расположенного в ИГ.
Сигналы управления реле и электропитания по постоянному и переменному току поступают через жгуты, подключенные к контактам 1а-24а, 1б-24б, 1с-10с и 1д-10д.
Контакты (D0-D15) используются для управления реле.
Через контакты (М(Ф)ФК 2-12/1(2)) подключаются аналоговые выходы ВВ.
Контакты (РТ) используются для подключения терморезистора к схеме стабилизации температуры.
Контакты (Вх.1Т0 и Вх.2Т0 ) используются для подключения датчика температуры.
Контакты (Вых.1 и Вых.2) используются для питания термоэлемента схемы БРТ.
Контакты (+15В. и –15В.) используются для питания по постоянному току.
Таблица 3.3 - Таблица состояния реле
| Наименование |
Реле |
Примечание |
||||
| 9 |
10 |
11 |
12 |
R1А |
||
| 1 |
2 |
3 |
4 |
5 |
6 |
7 |
| U011 U010 U001 U000 U111 |
0 0 0 0 0 |
0 0 0 0 1 |
1 1 0 0 1 |
1 0 1 0 1 |
0 0 0 0 0 |
|
| U011 U012 U021 U022 |
0 1 0 1 |
0 1 1 0 |
1 1 1 1 |
1 1 1 1 |
0 0 1 1 |
|
| U11 U12 U21 U22 |
0 1 0 1 |
0 1 0 0 |
1 1 0 1 |
1 1 0 1 |
0 0 1 1 |
|
3.4.2 Обоснование элементной базы
В разработанном комплексе применены широко распространенные и дешевые радиоэлементы:
− в качестве операционных усилителей выбран самый дешевый из прецизионных ОУ К140УД17А с малым температурным и временным дрейфами нуля, высоким входным сопротивлением и коэффициентом ослабления синфазного сигнала;
− блокировочные конденсаторы применены типа КМ и К50-35 как наиболее дешевые и допустимые;
− резисторы применены типа МЛТ с допуском 10% , С1 с допуском ±5% и СП5 с допуском ±5%;
− транзисторы типа КТ603 как наиболее дешёвые и подходящие в данной ситуации.
3.4.3 Конструкция ИКУ
Конструкторская проработка ИКУ отражена в МК 3.097.002, МК 4.720.001, МК 4.720.002, МК 4.720.003, МК 5.064.001, МК 6.192.002, МК 6.192.003, МК 6.192.004, МК 6.192.005, МК 5.192.006, МК 5.030.001, МК 6.030.001 (смотри приложение Б). Применение функционально-блочного метода конструирование открывает перспективу развития конструкции, что особенно выгодно на этапе моделирования, повышает унифицированность и ремонтопригодность устройства.
ПУиК выполнена в виде отдельного настольного блока. Основные устройства подключаются к материнской плате, которая установлена на кассете, вставляемой в основание корпуса.
На лицевой панели кассеты расположено гнездо разъёма для подключения ИГ, ВЧ разъём СР-50 для подключения выхода ПГСС, два разъёма СР-50 для подключения опорного канала. На задней панели расположены четыре разъёма СР-50 для подключения аналоговых выходов ВВ, разъём СР-50 для подключения терморезистора, гнездо разъёма DB-25 для подключения управляющих сигналов реле и низковольтного питания устройства, гнездо разъёма для подключения датчика температуры, и два гнезда разъёма для подключения входа и выхода сети питания 220 В.
В конструктивном исполнении модули НБ, НК, УР, УИ представляют собой односторонние печатные платы, устанавливаемые на материнскую плату через соответствующие разъёмы.
При конструировании модулей УР, НБ, НК были приняты во внимание принципы ВЧ монтажа.
3.5 Измерительные головки
При конструировании ИГ были приняты во внимание принципы конструирования ВЧ устройств с тем, чтобы предельно уменьшить влияние паразитных параметров соединительных проводников.
Особую проблему представляла собой конструкция контактов для подключения измеряемых устройств из-за большого разнообразия конструкций выводов однотипных РЭ (транзисторов, диодов и т.д.) и типоразмеров корпусов для аналоговых ИС.
Особое внимание было уделено конструированию ИГ для СВЧ РЭ.
4 Расчётная часть
4.1 Расчет площади и габаритов материнской платы
Для расчета площади платы необходимо определить площадь, которую занимают ЭРЭ расположенные на ней и коэффициент заполнения платы по площади.
Коэффициент заполнения платы по площади (Кзп ) примем равным 0.3, тогда площадь платы можно определить по формуле
 , (4.1)
, (4.1)
где Si - площадь каждого ЭРЭ.
Исходные данные для расчета площади платы приведены в табл.4.1.
Таблица 4.1 - Исходные данные для расчета площади платы ПК-2 .
| Тип ЭРЭ |
Количество, шт. |
Размеры, мм |
Площадь, мм2 |
| Конденсаторы |
12 |
2´12 |
288 |
| Разъёмы |
1 |
10´80 |
800 |
| 4 |
10´146 |
5840 |
|
| Резисторы |
13 |
4´10 |
520 |
| Реле |
16 |
6´12 |
1152 |
| Всего |
8600 |
Суммарная площадь, которую занимают ЭРЭ 9112 мм2 . Определим площадь платы ПК-2 по формуле (1)
Sпл = 8600 / 0.3 = 28666.7 мм2
Так как материнская плата крепится на кассете, то оптимальными её размерами будут 210´140 мм.
С учётом того, что на плате оставляется место под резерв, размер материнской платы возьмём равным 303´140 мм.
4.2 Расчёт теплового режима блока
Расчет теплового режима блока проведём на ЭВМ по методике приведённой в /19/, текст программы приведён в /20/.
Исходными данными для расчета являются:
− мощность потребляемая блоком, Вт;
− размеры блока (L1,L2,L3), м;
− коэффициент заполнения блока по объёму;
− площадь перфорационного отверстия (м2 ) и их количество (шт.);
− давление окружающей среды, МПа;
− температура окружающей среды, 0 С.
Рассчитаем коэффициент заполнения блока по объёму по формуле
![]() , (1)
, (1)
где Vэ - суммарный объём элементов установленных в блоке, м3 ;
V - объём блока, м3 .
Исходные данные для расчета:
− мощность потребляемая блоком Р = 3 Вт;
− размеры блока L1= 0,045м , L2 = 0,03 м , L3 = 0,008 м;
− рассчитаем коэффициент заполнения блока по объёму по формуле (1)
− давление окружающей среды Р=0,1 МПа;
− температура окружающей среды Т= 20 0С;
− площадь перфорационного отверстия S=0,0068 м2 .
Результаты расчета теплового режима блока:
− температура корпуса блока Тк =20,19 0 С;
− температура нагретой зоны Тз = 20,57 0 С;
− средняя температура воздуха в блоке Тв = 20,32 0 С.
4.3 Расчет надёжности блока
Расчет надежности проведём на ЭВМ с помощью программы приведённой в /20/.
Исходные данные для расчета приведены в таблице 4.2.
Таблица 4.2 - Исходные данные для расчета надёжности.
| № типа |
Тип ЭРЭ |
Количество |
Интенсивность отказов *Е +6 ,1/ч |
Коэффициент нагрузки |
| 1 |
Конденсаторы КМ1 |
10 |
0,075 |
0,5 |
| 2 |
Конденсаторы КМ-5б |
2 |
0,075 |
0,5 |
| 3 |
Пайка |
300 |
0,05 |
0,5 |
| 4 |
Плата |
1 |
0,7 |
0,6 |
| 5 |
Провод |
10 |
0,015 |
0,5 |
| 6 |
Резисторы МЛТ |
13 |
0,03 |
0,5 |
| 7 |
Реле |
16 |
0,5 |
0,2 |
В ходе выполнения расчёта мы получили следующие результаты:
1. Интенсивность отказа блока 9.840001E-06 1/ч.
2. Время наработки на отказ 468000 ч.
3. Вероятность отказа блока при времени работы указанном в ТЗ (10000 ч)
P=0.9062863.
Значения зависимости вероятности безотказной работы блока от времени его работы приведены в таблице 4.3.
Таблица 4.3 - Зависимость вероятности безотказной работы блока от времени его работы
| T час |
P(T) |
T час |
P(T) |
T час |
P(T) |
| 0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000 8500 9000 9500 10000 |
1 .9950921 .9902083 .9853484 .9805124 .9757001 .9709114 .9661463 .9614046 .956686 .9519907 .9473184 .942669 .9380425 .9334387 .9288574 .9242987 .9197623 .9152482 .9107562 .9062863 |
10500 11000 11500 12000 12500 13000 13500 14000 14500 15000 15500 16000 16500 17000 17500 18000 18500 19000 19500 20000 |
.9018384 .8974122 .8930078 .888625 .8842636 .8799238 .8756052 .8713078 .8670315 .8627762 .8585417 .854328 .8501351 .8459627 .8418108 .8376793 .833568 .8294769 .8254059 .8213549 |
20500 21000 21500 22000 22500 23000 23500 24000 24500 25000 25500 26000 26500 27000 27500 28000 28500 29000 29500 |
.8173237 .8133124 .8093207 .8053486 .8013961 .7974629 .793549 .7896543 .7857788 .7819222 .7780846 .7742658 .7704658 .7666844 .7629216 .7591772 .7554513 .7517436 .7480541 |
5. Технологическая часть
5.1 Качественный анализ конструкции
Основными показателями технологичности изделия являются его трудоемкость изготовления, себестоимость, программа выпуска и тип производства.
Анализируя техническое задание на дипломный проект, полагаем, что тип производства материнской платы – единичный. Таким образом, применение автоматизированного оборудования является нерентабельным. Следовательно, большинство операций по изготовлению материнской платы являются ручными, с применением станков и оборудования. В качестве материала для изготовления материнской платы используется стеклотекстолит марки СТФ-1-35-1,5 ТУ 15-503.16-83. Он обладает высокой механической прочностью, высокими электроизоляционными свойствами, низким водопоглощением. На материнской плате в оптимальной последовательности устанавливаются ЭРЭ, разъемы и детали крепежа. Такой вариант формирования является наиболее приемлемым, так как плата разбита на законченные функциональные узлы. Это позволяет легкую замену вышедшего из строя узла. Принимаемые типы ЭРЭ позволяют вести подготовительные операции (обрезку, лужение, формовку) в автоматизированном режиме, что позволяет снизить трудоемкость сборки печатной платы.
Монтаж платы односторонний, поэтому производить замену элементов печатной платы можно, не снимая ее. А также при сборке производить пайку прогрессивным методом – волной припоя. Крепление платы на салазках обеспечивает легкую ее замену в случае выхода из строя.
При сборке изделия используются освоенные в производстве детали, такие как контакты, лепестки, прокладки и т.д.
Точность технологических процессов является одной из главных количественных характеристик, но она не достаточна для того, чтобы в полной мере осуществить качество того или иного процесса. Для таких оценок вводят количественные характеристики и совместный учет точностных характеристик и характеристик устойчивости, позволяющих сделать обоснованное заключение о технологическом процессе. Чтобы плата была технологичной предусмотрено: приготовление деталей из унифицированных и стандартных элементов и использование деталей, заимствованных из освоенных ранее изделий, сокращение числа оригинальных и сложных деталей, размеры и поверхности которых требуют точности и шероховатости, экономически необоснованных, а также использование недефицитных и не дорогих материалов, являющихся технологичными.
Исходя из выше сказанного, конструкцию материнской платы можно считать технологичной.
5.2 Проектирование технологического процесса сборки печатной платы
Обеспечение высокой точности и надежности, серийно выпускаемых изделий достигается применением комплекса мероприятий, важной составной частью которого является технология сборки. Поэтому качественное проведение сборочных операций является одним из условий повышения качества сборки изделия, долговечности собираемых узлов и изделий.
В общем виде сборочный процесс представляет собой соединение в определенной последовательности отдельных деталей и электрорадиоэлементов в сборочные узлы для получения законченного изделия. Различают общую и узловую сборку. Общей сборкой называется часть технологического процесса, в течение которой происходит фиксация составляющих сборочных единиц. Узловая сборка – часть технологического процесса, которая имеет целью образования сборочных единиц, входящих в данное изделие, в соответствии с предъявляемыми к ним требованиями.
При проектировании технологического процесса сборки печатной платы анализируют технологичность конструкции. Общие технические требования сводятся к допустимости параллельной и независимой узловой сборки, взаимозаменяемости деталей, обеспечению свободного допуска к монтажу.
Основой проектирования сборочного процесса являются типовые технологические процессы сборки узлов, основываясь на которые мы составляем схему рабочего технологического процесса сборки печатной платы.
![]()
Рисунок 5.1 - Схема рабочего технологического процесса сборки печатной платы
Основными частями схемы являются операции комплектования, подготовки ЭРЭ, подготовки печатной платы, сборки, контроля, лакирования.
Согласно приведенной схемы составим маршрутные и операционные карты (смотри приложение Г).
Сборка печатной платы не должна осуществляться с применением сложного оснащения, сборочные операции должны быть максимально механизированы. С этой целью проведем выбор средств технологического оснащения. Для подготовки ЭРЭ к сборке используем следующее широко применяемое оборудование.
Для резисторов и конденсаторов используют автомат типа К12-010.00.00.000.
Лужение всех остальных элементов будем производить погружением в ванну ГГ-0867-4003. Пайку ЭРЭ производим в автоматизированном режиме на установке АУБ 28.00.
Используем также универсальные инструменты и приспособления согласно технологическому процессу.
5.3 Определение количественных показателей технологичности конструкции разрабатываемой материнской платы
Показатели технологичности конструкции изделия определяют по общесоюзным и отраслевым методикам. В дипломном проекте показатели технологичности определяем в соответствии с ОСТ 4.091.114-78 и ОСТ 4.091.105-79.
Исходные данные всех показателей приведены в таблице 5.1.
Трудоемкость изготовления изделия
Ти =å Тi (5.1)
где Ti – трудоёмкость изготовления сборки, регулировки контроля и испытания i-ой составной части изделия, нормо/ч.
Ти =43,4+5,16+13,8+83,04+20,08+43,4=208,8 нормо/ч
Таблица 5.1 - Исходные данные показателей
| Наименование показателя |
Условное обозначение |
Значение показа-теля |
|
| Основные и дополнительные технико-экономические показатели трудоемкости |
|||
| Изготовление изделия |
Ти нормо/ч |
109,55 |
|
| Литейных работ |
ТЛ нормо/ч |
0 |
|
| Работ по обработке металлов давления |
ТД нормо/ч |
0 |
|
| Работ по формообразованию деталей из полимерных материалов |
ТП нормо/ч |
0 |
|
| Заготовительных работ выполняемых обработкой резанием |
ТО нормо/ч |
0 |
|
| - обработки резанием |
ТО Р нормо/ч |
10,8 |
|
| - сборно-монтажных работ |
ТС нормо/ч |
25,9 |
|
| Регулировочных и контрольно-испытательных работ |
ТР К нормо/ч |
29,7 |
|
| - работ по изготовлению печатных плат |
ТП П нормо/ч |
9,5 |
|
| Наименование показателя |
Условное обозначение |
Значение показа-теля |
|
| Основные и дополнительные технико-экономические показатели себестоимости |
|||
| Расходы на сырье и материалы (за вычетом стоимости отходов) |
СМ руб. |
480,6 |
|
| Основная зарплата производственных рабочих с начислениями |
С руб. |
183,09 |
|
| Расходы на износ инструментов |
СИ Н руб. |
18,4 |
|
| Расходы на содержание оборудования |
СО руб. |
32,48 |
|
| Стоимость покупных изделий |
СП К руб. |
480,6 |
|
| Полная себестоимость изделий |
СИ руб. |
1144,29 |
|
| Дополнительные технические показатели |
|||
| Количество типоразмеров заимствованных деталей |
ДТ З шт. |
13 |
|
| Общее количество типоразмеров деталей в изделии |
ДТ шт. |
6 |
|
| Общее количество деталей в изделии |
Д шт. |
87 |
|
| Количество монтажных соединений выполненных на печатных платах, которые могут осущ. мех. способ. |
НМ М шт. |
192 |
|
| Общее количество монтажных соединений |
НМ шт. |
246 |
|
| Общее количество ЭРЭ, в изделии которые должны подготавливаться к монтажу в соответствии с требованиями конструкторской документации |
НП ЭРЭ шт. |
20 |
|
| Показатели техничности изделия – аналога |
|||
| Трудоемкость изготовления |
ТН О шт. |
3127 |
|
| Технологическая себестоимость |
СТ шт. |
280,76 |
|
Таблица 5.2 - Коэффициенты весомости по классу показателя изделия (электронного)
| ТОС =1 |
СОПК =1 |
КОСВ =0,76 |
КПОВ ПП =0,2 |
| ТООР =0,5 |
СОТ =0,8 |
КТП =0,68 |
КСБ =0,4 |
| ТОРК =0,3 |
КМС =0,92 |
КПОВ Д =0,52 |
|
| ТОЗР =0,2 |
КАРК =1 |
КФ =0,44 |
|
| ТОПП =0,1 |
КПП =0,6 |
КМП ЭРЭ =0,2 |
Технологическая себестоимость
![]() (5.2)
(5.2)
СТ = 30,2+64,4+18,4+32,48=280,76 руб.
Дополнительные технико-экономические показатели технологичности.
Относительная трудоемкость обработки резанием определяется по формуле:
 (5.3)
(5.3)
Относительная трудоемкость сборочно-монтажных работ определяется по формуле:
 (5.4)
(5.4)
Относительная трудоемкость регулировочных и контрольно-испытательных работ определяется по формуле:
 (5.5)
(5.5)
Относительная трудоемкость изготовления печатных плат определяется по формуле:
 (5.6)
(5.6)
Относительная себестоимость покупных комплектующих изделий определяется по формуле:
 (5.7)
(5.7)
Относительная технологическая себестоимость изделий определяется по формуле:
 (5.8)
(5.8)
1.1.1.1 Коэффициент освоенности деталей определяется по формуле:
 (5.9)
(5.9)
1.1.1.2 Коэффициент повторяемости деталей определяется по формуле:
 (5.10)
(5.10)
1.1.1.3 Коэффициент механизации монтажа определяется по формуле:
 (5.11)
(5.11)
1.1.1.4 Коэффициент применения типовых технологических процессов определяется по формуле:
 (5.12)
(5.12)
1.1.1.5 Коэффициент механизации подготовки ЭРЭ к монтажу определяется по формуле:
 (5.13)
(5.13)
1.1.1.6 Комплексный относительный технико-экономический показатель трудоемкости определяется по формуле:
 (5.14)
(5.14)
где Кiэ - коэффициенты весомости по классу показателя изделия
Toi - показатели трудоемкости рассчитанные выше

1.1.1.7 Комплексный относительный технико-экономический показатель себестоимости определяется по формуле:
1.1.1.8  (5.15)
(5.15)
где Кiэ - коэффициенты весомости по классу показателя изделия
Сoi - показатели себестоимости рассчитанные выше

1.1.1.9 Комплексный относительный показатель техничности определяется по формуле:
 (5.16)
(5.16)
где Кiэ - коэффициенты весомости по классу показателя изделия
Кiтте - показатели техничности рассчитанные выше
Уровень технологичности по трудоемкости изготовления определяется по формуле:
 (5.17)
(5.17)
Уровень технологичности по комплексному относительному технико-экономическому
показателю трудоемкости определяется по формуле:
 (5.18)
(5.18)
Уровень технологичности по технологической себестоимости определяется по формуле:
 (5.19)
(5.19)
Уровень технологичности по комплексному относительному технико-экономическому показателю себестоимости определяется по формуле:
 (5.20)
(5.20)
Уровень технологичности по комплексному относительному техническому показателю определяется по формуле:
1.1.1.10  (5.21)
(5.21)
Значения уровней технологичности разрабатываемой конструкции должны находиться в пределах 0< КУТ <1; 0< КУС <=1; 0< КУОТ <=1; 0< КУОС <=1; КУОТЕХ >=1. В нашем случае все значения уровней технологичности разрабатываемой конструкции удовлетворяют требованиям данных условий.