| Скачать .docx |
Реферат: Разомкнутые и замкнутые цифровые СУ. Цифровой компьютер
Федеральное агентство по образованию РФ
Государственное образовательное учреждение
высшего профессионального образования
«Ярославский государственный технический университет»
Реферат защитил
с оценкой __________
Преподаватель
__________ Ю.В. Никитина
Реферат по дисциплине
«Основы теории управления»
ЯГТУ 230201.65
«Разомкнутые и замкнутые цифровые СУ. Цифровой компьютер»
Работу выполнил
студент гр. ДСИТ-37
__________ Е.Ф. Пузырев
Ярославль 2010
СОДЕРЖАНИЕ
ВВЕДЕНИЕ………………………………………………………….…….….3
1. Системы автоматического управления…………………….…………...5
1.1. Разомкнутые САУ…………………………………………….……….…5
1.2. Замкнутые САУ ……………………………………………….…….…..7
2. Цифровой компьютер……………………………………………………13
ЛИТЕРАТУРА………………………………………………………………15
ВВЕДЕНИЕ
Совокупность управляемого объекта и устройства, обеспечивающего реализацию части или всех функций процесса управления без непосредственного участия человека, называется автоматической системой, (системой автоматики). По функциональному признаку автоматические системы разделяются на два основных вида: 1) системы автоматического контроля (САК); 2) системы автоматического управления (САУ). САК обеспечивают автоматическое получение информации о состоянии и условиях работы того или иного объекта управления, а также ее представление в удобном виде на пульте оператора (диспетчера), а САУ — автоматическое функционирование объекта в соответствии с требованиями технологического процесса.
Рассмотрим принципы построения различных автоматических систем, используя, их функциональные и принципиальные схемы. На функциональных схемах (блок-схемах) составные части системы (блоки) представляются геометрическими фигурами (прямоугольниками, кружками), а их взаимодействие — линиями со стрелками. Блоки обозначаются буквами (словами), соответствующими выполняемым ими функциям. Число блоков для одной и той же системы может быть различным, так как их выделение производится условно, в зависимости от детализации выполняемых ими функций в системе.
Детальное представление о принципах работы автоматической системы дает ее принципиальная схема, на которой элементы и связи между ними изображают в виде условных графических обозначений, установленных целым рядом Государственных общесоюзных стандартов (ГОСТ). Позиционные обозначения элементов или устройств принципиальной схемы также определяются требованиями ГОСТа. Например, при выполнении электрических схем руководствуются ГОСТ 2.721—74, ГОСТ 2.728—74, ГОСТ 2.730—73, ГОСТ 2755—74, ГОСТ 2.756—76 на обозначения условные графические для различных элементов и ГОСТ 2.710—81 на их буквенно-цифровые обозначения.
Общая функциональная схема системы автоматического контроля представлена па рис. 1, а. Контролируемая величина х объекта О измеряется блоком (элементом) ИБ и поступает в управляющий блок УБ, в котором формируется сигнал и, подаваемый на воспроизводящий блок (элемент) ВБ. Последний фиксирует результаты контроля в форме, удобной для оператора, используя световые, звуковые, стрелочные, цифровые, самопишущие приборы. Состав воспроизводящих приборов определяется требованиями к системе контроля.
В качестве примера САК на рис. 1,6 приведена принципиальная схема контроля уровня жидкости в емкости. Контролируемым параметром в этой системе является уровень Н, например, воды в баке. Функции измерительного элемента выполняет металлический электрод (датчик) В установленный на высоте, соответствующей заданному значению уровня.
Управляющий блок представлен электромагнитным реле К. воспроизводящий элемент — сигнальной лампой НL. Когда вода поднимается до уровня установки электрода В, по обмотке реле от источника U1 будет проходить ток. Контакт реле замкнется и подключит к источнику U2 сигнальную лампу.
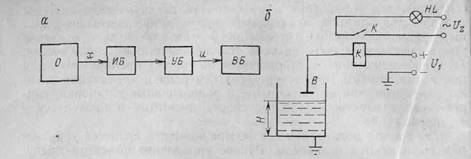
Рис. 1. Общая функциональная схема системы автоматического контроля (а) и пример её реализации (б).
1. Системы автоматического управления
Они классифицируются по ряду признаков, характеризующих различные их особенности.
1. По типу контура управления: разомкнутые, замкнутые.
2. По принципу управления: по отклонению, комбинированные, адаптивные.
3. По характеру изменения задания: стабилизирующие, программные, следящие.
4. По характеру сигнала: непрерывные, дискретные (импульсные, релейные, цифровые).
5. По характеру реакции на возмущение: статические, астатические.
6. По виду вспомогательной энергии: электрические, пневматические, гидравлические, комбинированные.
1.1. Разомкнутые САУ
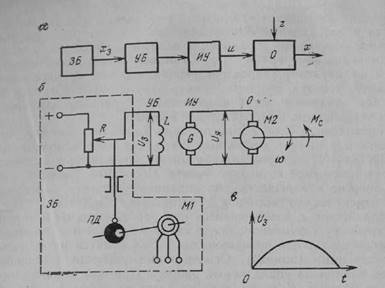
Рис.2. Общая функциональная схема разомкнутой системы автоматического управления (а), пример е реализации (б) и программа изменения скорости (в)
Простейшими системами управления являются разомкнутые САУ (рис. 2.,а). Они обеспечивают заданный закон изменения состояния объекта управления (включение, выключение, изменение режима работы, требуемую последовательность технологических операций и др.) без контроля результатов управления (без обратной связи). Закон изменения состояния объекта управления во времени называется программой управления. Последняя размещается в специальном блоке-задатчике ЗБ, который формирует заданное значение х3 управляемой величины х объекта, т. е. закон ее изменения во времени. При этом под управляемой величиной понимают параметр, характеризующий рабочий процесс объекта например, угловую скорость, температуру, момент нагрузки и др. Функции задатчика могут выполняться релейным или программным устройством, вычислительной машиной.
Управляющий блок УБ воспринимает сигнал задатчика, преобразует его и выдает командный сигнал на вход исполнительного устройства ИУ, которое вырабатывает управляющее воздействия и, прикладываемое ко входу объекта. Последнее изменяет количество энергии или вещества, подводимого к объекту, обеспечивая этим изменение его состояния в соответствии с заданием.
Воздействия z, изменяющиеся при работе системы и нарушающие требуемую функциональную связь между х3 и х, называются возмущающими, или возмущениями. Они делятся на основные и второстепенные (помехи). Основные возмущающие воздействия! сильно влияют на управляемый процесс. Они, как правило, приложены к объекту. К ним относятся нагрузка объекта управления, влияние температуры, влажности и т. п. Помехи — это многочисленные воздействия, слабо влияющие на ход процесса. К ним можно отнести колебания напряжения в сети переменного тока, изменения сопротивлений цепей, воздушные зазоры и упругие деформации в деталях и т. п. Помехи могут воздействовать на часть или на все элементы системы.
В качестве примера разомкнутой САУ на рис. 2, б представлена принципиальная схема управления угловой скоростью электродвигателя М2. Программное устройство (задатчик) в этой системе выполнено на синхронном микродвигателе М1, на валу которого расположен профильный диск ПД, и резисторе R, подвижный контакт которого перемещается толкателем, взаимодействующим с ПД. Программа изменения скорости (рис. 2., в) определяется профилем диска ПД. В соответствии с изменением напряжения U3 , подаваемого на обмотку возбуждения L генератора G изменяются во времени напряжение Uя на якоре двигателя М2 (управляющее воздействие) и угловая скорость вала у управляемая величина). Основное возмущение в этой системе — нагрузка на валу двигателя, т. е. статический момент Мс .
Изменяя профиль диска ПД, можно получить любой закон изменения скорости двигателя. Подобный принцип задания скорости 3 используется при управлении подъемными машинами. Профильный диск связывают с валом подъемной машины, задавая скорость в зависимости от положения подъемного сосуда в стволе.
Недостаток разомкнутых САУ — малая точность выполнения I заданного закона управления, так как возмущающие воздействия не компенсируются. Поэтому такие системы в основном применяют для автоматизации процессов пуска и останова машин и механизмов, когда не требуется точное выполнение заданного закона изменения скорости (насосы, вентиляторы, конвейеры, компрессоры и др.), а также для обеспечения требуемой последовательности рабочих операций.
1.2. Замкнутые САУ
Замкнутые САУ строятся на основе принципа обратной связи, сущность которого заключается в том, что управляющее воздействие ставится в зависимость от того результата, который оно вызывает. Под обратной связью понимают устройство, осуществляющее передачу воздействия с выхода системы или ее элемента на их входы. Такие связи (их может быть несколько в одной системе) реализуются на основе измерительных устройств.
Обратные связи могут быть жесткими и гибкими, положительными и отрицательными. Жесткая обратная связь действует постоянно, т. е. в переходных и установившихся режимах работы системы, а гибкая — только в переходных режимах. Сигнал положительной обратной связи суммируется с входным сигналом системы (элемента), а сигнал отрицательной — вычитается из входного сигнала.
Замкнутая САУ (рис. 3, а), в которой управляющее воздействие вырабатывается в функции отклонения действительного значения управляемой величины от ее заданного значения, называется системой автоматического регулирования (САР). Управление в таких системах называют регулированием, управляющее устройство — регулятором, а управляемую величину — регулируемой величиной.
В САР, представленной на рис. 3, а, реализован принцип управления отклонению. Блок ИБ измеряет регулируемую величину х, преобразует ее в величину хи
, подобную выходной величине х3
задатчика ЗБ и подаёт на элемент сравнения ЭС, который определяет отклонение регулируемой величины от заданного значения: ![]()
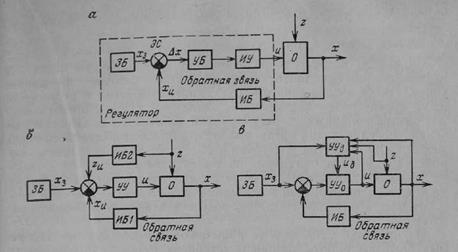
Рис.3 .Функциональные схемы замкнутых САУ: а – САР по отклонению; б – комбинированием ; в – адаптивная
Сигнал ∆х после преобразования в управляющем блоке УБ передается на исполнительное устройство, которое формирует управляющее воздействие ![]() ,прикладываемое к регулирующему органу объекта (задвижке, клапану и т. п.) и обеспечивает тем самым приближение регулируемой величины к заданному значению. Регулирующий орган может отсутствовать, если весь поток энергии или вещества поступает в объект от исполнительного устройства, например, от генератора к электродвигателю.
,прикладываемое к регулирующему органу объекта (задвижке, клапану и т. п.) и обеспечивает тем самым приближение регулируемой величины к заданному значению. Регулирующий орган может отсутствовать, если весь поток энергии или вещества поступает в объект от исполнительного устройства, например, от генератора к электродвигателю.
Для САР характерно наличие отрицательной обратной связи и! замкнутой цепи передачи воздействий: УБ—ИУ—О—ИБ—ЭС—УБ. Благодаря этому они способны обеспечить высокую точность управления.
На. практике САР широко применяют для обеспечения требуемых режимов работы машин и установок путем поддержания на. заданном уровне или изменения по заданному закону величин, характеризующих их рабочие процессы.
Системы, имеющие задание поддерживать управляемую величину на постоянном уровне х3 =constназываются автоматическими стабилизирующими системами. К ним относятся, например, системы автоматической стабилизации температуры подаваемого в шахту воздуха, нагрузки выемочных и проходческих комбайнов, давления в пневмосети и др.
Замкнутые системы, изменяющие управляемую величину в соответствии с заранее заданной функцией какого-либо параметра (времени, пути и т. д.), называются программными автоматическими системами. К таким системам относится, например, САР скорости шахтной подъемной машины.
Системы, имеющие задание изменять управляемую величину в соответствии с действующей на входе системы переменной величиной, закон изменения которой заранее неизвестен, называются ^ следящими автоматическими системами. Примером таких систем является САР производительности компрессорной станции, обеспечивающая производство сжатого воздуха в соответствии с его потреблением, имеющим случайный характер изменения во времени.
Автоматические системы управления высокой точности обычно строят по принципу комбинированного управления (рис. 3, б). В таких системах воздействие и вырабатывается управляющим устройством УУ в функции отклонения и возмущения. Последнее измеряется блоком ИБ2 и подается на вход системы в виде сигнала zи , который суммируется с заданием х3 компенсируя тем самым вредное влияние возмущения г на управляемую величину х.
Успешное развитие кибернетики позволило применить в автоматических системах новый принцип управления, называемый! принципом адаптации (приспособления). Системы, использующие этот принцип, способны обеспечить высокое качество управления объектами с переменными свойствами и условиями функционирования, например, добычными механизмами и буровыми установками, у которых в процессе работы затупляются режущие элементы рабочих органов, изменяются физико-механические свойства горного массива, масса подвижных частей и др.
Адаптивная (самонастраивающаяся) САУ (рис. 3, в) содержит дополнительное управляющее устройство УУД, которое вырабатывает корректирующее воздействие ![]() , используя информацию об изменении управляемой величины, задающего и возмущающего воздействия. Сигнал
, используя информацию об изменении управляемой величины, задающего и возмущающего воздействия. Сигнал ![]() вызывает необходимые изменения структуры и параметров основного управляющего устройства УУ0
, т. е. осуществляет самонастройку системы в процессе ее функционирования.
вызывает необходимые изменения структуры и параметров основного управляющего устройства УУ0
, т. е. осуществляет самонастройку системы в процессе ее функционирования.
В зависимости от характера сигналов, передаваемых от одного элемента системы к другому, автоматические системы делятся на непрерывные, импульсные, релейные и цифровые (кодовые).
Непрерывные системы имеют на входе и выходе всех элементов сигналы, представляющие собой непрерывные функции времени.
Импульсные системы содержат по крайней мере один элемент, сигнал на выходе которого представляет собой последовательность импульсов, амплитуда, длительность и частота повторений которых зависят от .сигнала на входе этого элемента в отдельные (дискретные) моменты времени.
Релейные системы характеризуются наличием хотя бы одного элемента, сигнал на выходе которого изменяется скачком всякий раз, когда сигнал на его входе проходит через некоторые фиксированные значения, называемые порогами или уровнями.
Цифровые системы содержат элементы, которые преобразуют непрерывные сигналы в дискретные путем квантования их по уровню и по времени и осуществляют их представление в виде последовательности чисел в цифровом коде.
Импульсные, релейные и цифровые системы образуют класс дискретных систем управления, характерной особенностью которых является наличие одного или нескольких дискретных сигналов, т. е. сигналов, изменяющихся скачком или представленных в виде последовательности кратковременных импульсов. Дискретные системы в настоящее время в связи с бурным развитием вычислительной техники получают все большее применение в промышленной автоматике.
В зависимости от характера реакции на возмущения САУ делятся на статические и астатические.
К статическим САУ относятся системы, у которых установившееся значение управляемой величины зависит от величины возмущающего воздействия, так что отклонение от задания пропорционально величине последнего, т. е. в системе всегда имеется так называемая статическая погрешность.
В астатических системах установившееся значение управляв мой величины не зависит от величины возмущающего воздействия и статическая погрешность равна нулю.
Проектированию любой автоматической системы предшествует анализ производственного процесса, условий эксплуатации и формулирование требований к САУ. В связи с этим далее рассматриваются некоторые вопросы теории, раскрывающие принципы построения автоматических систем и закономерности протекающих в них процессов.
2. Цифровой компьютер
Рассмотрим подробно компьютер, входящий в состав замкнутой цифровой системы управления (рис. 4). Здесь и далее аналоговые сигналы обозначаются сплошными линиями, а дискретные (числовые последовательности) — точечными.
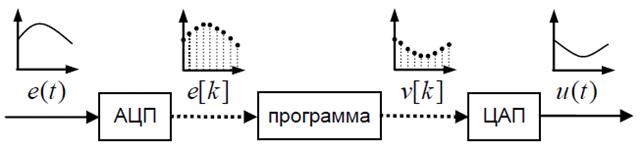
Рис. 4. Блок-схема цифрового компьютера
Аналоговые входные сигналы (задающие воздействия, сигнал ошибки, сигналы обратной связи с датчиков) поступают на аналого-цифровой преобразователь (АЦП), где преобразуются в цифровую форму (двоичный код). В большинстве случаев АЦП выполняет это преобразование периодически с некоторым интервалом T , который называется интервалом квантования или периодом квантования . Таким образом, из непрерывного сигнала выбираются дискретные значения (выборка, англ. sampling ) e [k ] = e (kT ) при целых k =0,1,…, образующие последовательность {e [k ]}. Этот процесс называется квантованием . Таким образом, сигнал на выходе АЦП можно трактовать как последовательность чисел. Вычислительная программа в соответствии с некоторым алгоритмом преобразует входную числовую последовательность {e [k ]} в управляющую последовательность {v [k ]}.
Цифро-аналоговый преобразователь (ЦАП) восстанавливает непрерывный сигнал управления по последовательности {v [k ]}. Чаще всего ЦАП работает с тем же периодом, что и АЦП на входе компьютера. Однако для расчета очередного управляющего сигнала требуется некоторое время, из-за этого возникает так называемое вычислительное запаздывание . На практике принято это запаздывание относить к непрерывной части системы и считать, что АЦП и ЦАП работают не только синхронно (с одинаковым периодом), но и синфазно (одновременно).
Особенности цифровых систем
Очевидно, что основные характерные черты цифровых систем управления связаны с наличием компьютера (цифрового устройства) в составе системы. Главные преимущества цифровой управляющей техники сводятся к следующему:
• используется стандартная аппаратура;
• нет дрейфа параметров, характерного для аналоговых элементов;
• повышается надежность и отказоустойчивость;
• существует возможность реализации сложных законов управления, в том числе логических и адаптивных;
• гибкость, простота перестройки алгоритма управления.
Как обычно, за достоинства приходится расплачиваться. В результате квантования по времени компьютер получает только значения входных сигналов в моменты квантования, игнорируя все остальные. Кроме того, АЦП и ЦАП имеют ограниченное число разрядов, поэтому при измерении входного сигнала и выдаче сигнала управления происходит округление значения к ближайшему, которое сможет обработать АЦП (или ЦАП). Это явление называют квантованием по уровню .
Таким образом, квантование в цифровых системах приводит к специфическим эффектам, которые можно считать их недостатками :
• между моментами квантования система фактически не управляется, это может привести к потере устойчивости;
• при квантовании по времени теряется информация о значениях измеряемых сигналов между моментами квантования;
• квантование по уровню приводит к потере точности, что может вызвать дополнительную ошибку в установившемся режиме и автоколебания.
ЛИТЕРАТУРА
1. П.Д. Гаврилов., Л.Я. Гимельштейн, А.Е. Медведев. Автоматизация производственных процессов. М: Недра,1985
2. Исаковия Р.Я., Попадько В.Е. Контроль и автоматизация добычи нефти и газа. М.: Недра,1985