| Скачать .docx |
Курсовая работа: Курсовая работа: Расчет тяговых характеристик тепловозов с электрической передачей и электровозов
ФЕДЕРАЛЬНОЕ АГЕНСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА РФ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ (МИИТ)
Кафедра «Локомотивы и локомотивное хозяйство»
КУРСОВОЙ ПРОЕКТ
По предмету: «Электрические передачи локомотивов»
на тему: «РАСЧЕТ ТЯГОВЫХ ХАРАКТЕРИСТИК ТЕПЛОВОЗОВ С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ И ЭЛЕКТРОВОЗОВ»
Выполнил студент
Группы ТЛТ-451
Курохтин Д.Н.
Проверил: Киселев В.И.
Москва 2009 г.
СОДЕРЖАНИЕ
Введение
1. Типы электрических передач локомотивов
1.1 Электрическая передача постоянного тока
1.2 Электрическая передача переменно-постоянного тока
1.3 Электрическая передача переменного тока
1.4 Описание с изображением основных узлов тяговой характеристики тепловозов с гидромеханической и гидравлической передачей мощности.
2. Физические основы преобразования энергии в электрических машинах.
2.1 В тяговом двигателе постоянного и переменного тока
2.2. В генераторах постоянного и переменного тока
2.3. В трансформаторах
3. Создание силы тяги локомотива
4. Назначение и конструкция тяговых электродвигателей тепловозов
4.1. Назначение тяговых электродвигателей
4.2. Конструкция основных узлов и элементов тягового электрического двигателя тепловоза
5.Расчетная часть курсового проекта.
5.1. Определение параметров ТЭД на номинальном режиме
5.2. Расчет характеристики намагничивания ТЭД при различных режимах нагрузки и возбуждения
5.3.Расчет и построение внешней характеристики тягового генератора тепловоза
5.4. Расчет и построение электромеханических и электрических тяговых характеристик ТЭД с учетом параметров КМБ
5.5. Расчет и построение тяговой и токовой характеристик с учетом ограничений
6. Электроподвижной состав.
6.1. Электровозы постоянного тока
6.2. Электровозы переменного тока
6.3 Электропоезда
7. Выводы
8.Список используемой литературы
Введение
Целью курсовой работы является изучение физических процессов,, происходящих в колесно-моторном блоке (КМБ) тепловоза при преобразовании электрической энергии в механическую, и создании силы тяги. На основании рассчитанных параметров тягового электродвигателя (ТЭД) строится тяговая характеристика тепловоза с нанесением на ней ограничений по конструктивным параметрам и условиям сцепления колеса с рельсом.
При выполнении работы решаются следующие задачи:
определяются параметры ТЭД на номинальном режиме работы;
рассчитывается характеристика намагничивания ТЭД;
строятся кривые намагничивания ТЭД при различных режимах нагрузки и возбуждения;
рассчитываются и строится внешняя характеристика тягового генератора тепловоза;
строятся электромеханические и электротяговые характеристики ТЭД с учетом параметров КМБ;
рассчитывается и строится тяговая и токовая характеристика локомотива с учетом ограничений.
Исходные данные тягового двигателя тепловоза :
Номинальная мощность двигателя Рдн , кВт – 320
Число пар полюсов 2р=4 , 2а=4
Передаточное число зубчатой передачи ![]() =4,21
=4,21
Номинальная частота вращения двигателя n , об/мин – 575
Номинальное напряжение двигателя Uдн , В – 480
Количество проводников якорной обмотки – 630
Диаметр колеса , мм – 1050
Число осей nос , - 6
Осевая нагрузка 2П , т – 23
Конструкционная скорость Vк , км/ч - 100
Типы электрических передач локомотивов
Назначение любого типа передач - создать дизелю постоянный режим работы, т.е. независимо от профиля пути дизель должен работать с одной и той же мощностью (не должно быть переходных режимов работы).
Передача механической энергии от коленчатого вала дизеля к колесным парам тепловозов осуществляется с помощью самых разнообразных устройств, в которых реализуются различные принципы преобразования энергии.
Из всех выделяются основные четыре типа передач, которые в различной степени применяются на тепловозах: механическая, газовая, электрическая и гидромеханическая.
Механическая передача. Самый простой по устройству тип тяговой передачи. Характеризуется жесткой (рис. 1.) кинематической связью между входным (вал дизеля) и выходным (ось колесной пары) звеньями. Основными составляющими механической передачи являются: муфта сцепления, многоступенчатый редуктор, механическая трансмиссия, которая распределяет механическую энергию от выходного вала редуктора к осям колесных пар.
|
|
|
|
||||
![]()
![]()
![]()
![]()
![]() мф
мф
Рис.1.1 Схема механической передачи локомотивов.
где Д - дизель; Мф - муфта; КПП - коробка передач; ОР - осевой редуктор; КП - колесная пара.
Достоинства механической передачи:
компактность;
малая масса;
относительно малая стоимость изготовления;
высокий коэффициент полезного действия (КПД) - около 95%.
Недостатки механической передачи:
низкая эксплуатационная надежность, особенно при больших мощностях;
неполное использование мощности дизеля;
полная потеря силы тяги в процессе переключения ступеней скорости;
ступенчатое изменение силы тяги в функции скорости.
Механическая передача нашла свое применение в локомотивах малой (до 100 кВт) мощности, автомотрисах, мотовозах.
Электрическая передача. Данный тип получил широчайшее распространение на магистральных и маневровых тепловозах. При этом электрическая передача разделяется на три вида: постоянного, постоянно - переменного и переменного тока.
1.1. Передача постоянного тока
Основными составляющими данной передачи являются: тяговый генератор постоянного тока (ГТ) и тяговые электродвигатели постоянного тока (ТЭД).
Рис.1.2 Передача постоянного тока, где Д - дизель; ГГ - главный генератор; ПРА - пуско-регулирующая аппаратура; ТЭД - тяговый электродвигатель; КП - колесные пары. Достоинства электрической передачи постоянного тока: простота регулирования; простота компоновки на тепловозе; высокий КПД.
Недостатки электрической передачи постоянного тока:
большой вес и габариты конструкций;
ограничение по мощности тягового генератора.
Передачи постоянного тока находят основное применение на тепловозах мощностью до 2200 кВт.
1.2.Передача переменно - постоянного тока
Данная передача состоит из тягового генератора переменного тока (СГ), выпрямительной установки (ВУ) и тяговых электродвигателей постоянного тока (ТЭД).
 |
Рис 1. 3 Передача переменно-постоянного тока, Д - дизель; СГ - генератор переменного тока; ВУ - выпрямительная установка; ПРУ - пуско - регулирующее устройство; ТЭД - тяговые электродвигатели; КП - колесные пары.
Достоинства электрической передачи переменно - постоянного тока:
снятие ограничения по мощности тягового генератора.
Недостатки электрической передачи постоянного тока:
уменьшение по сравнению с передачей постоянного тока общего КПД передачи.
Данным типом передачи оборудованы большинство серий современных магистральных тепловозов мощностью 1500 - 4500 кВт.
1.3.Передача переменного тока
 |
 |
Рис.1. 4 Передача переменного тока, где Д - дизель; СГ - генератор переменного тока; ВУ - выпрямительная установка; И - инвертор; ПРА - пуско-регулирующая аппаратура; АД - асинхронный электродвигатель; КП - колесная пара.
Достоинства передачи:
простота устройства электрических машин;
высокая эксплуатационная надежность;
хорошие весогабаритные показатели.
1.4 Тяговая характеристика тепловоза с гидравлической передачей мощности
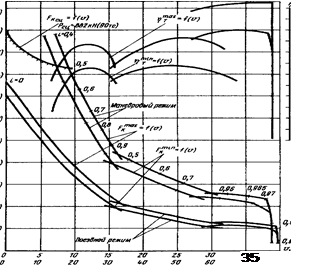
Масса и скорость поезда — важнейшие показатели работы железнодорожного транспорта. Тепловоз данной мощности может вести составы с различной скоростью в зависимости от их массы и профиля пути. Для определения весовых норм составов, скорости движения, времени хода и других целей служит тяговая характеристика тепловоза, которая представляет собой зависимость касательной силы тяги от скорости (рис.1.5, характеристика построена для 8-й позиции контроллера). На рис.1.5 также приведена зависимость коэффициента полезного действия тепловоза от скорости его движения и показано ограничение силы тяги по сцепному весу тепловоза. Наибольшие и наименьшие значения силы тяги и коэффициента полезного действия приведены соответственно при наименьших и наибольших затратах мощности на собственные вспомогательные нужды тепловоза.
Кинематическая схема гидродинамической передачи мощности
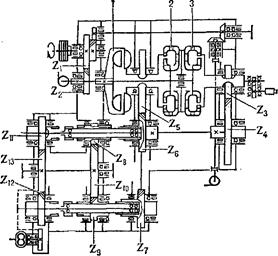
1- гидромуфта
2,3-гидротрансформаторы
2. Физические основы преобразования энергии в электрических машинах
2.1. Тяговые электродвигатели постоянного тока
Основные соотношения величин, которые характеризуют физические явления, лежащие в основе работы электрических машин (электродвигателя и генератора), можно получить на основании законов Ампера и Фарадея [1].
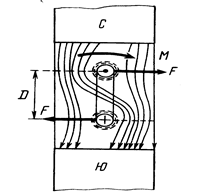
Рассмотрим действие однородного магнитного поля, созданного полюсами С и Ю, на проводник с током I. Вокруг проводника возникает магнитное поле, направление которого определяется по правилу буравчика (рис.2.1,а). Справа от проводника, где направления линий магнитного поля проводника и полюсов совпадают, происходит сгущение линий и, следовательно, увеличение магнитной индукции поля. Слева от проводника, где магнитные линии поля проводника и внешнего поля направлены навстречу друг другу, происходит разрежение магнитного поля (уменьшение магнитной индукции). Вследствие упругости, магнитные линии стремятся сократиться по длине и выталкивают проводник с током из области сгущения линий в область разрежения (рис.2.1,б).
 |
Действие магнитного поля на проводник (а,б) и виток (в) с током
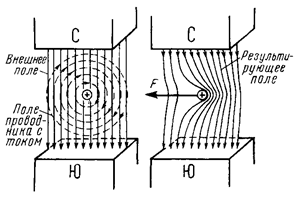 |
а) б) в)
Рис.2.1.
Результирующая электромагнитная сила F, действующая на проводник, определяется законом Ампера : электромагнитная сила, действующая на проводник с током, находящийся в магнитном поле и расположенный перпендикулярно направлению поля, равна произведению силы тока I, индукции магнитного поля B и длины проводника L
F=B. I. L. (2.1)
Из формулы (2.1) следует, что B=F/(I. L). Таким образом, магнитная индукция, количественно характеризующая интенсивность магнитного поля, равна максимальной силе, действующей в магнитном поле на участок единичной длины проводника, по которому течет ток силой 1 А.
В системе СИ единица измерения магнитной индукции В - тесла.
1 Тл = 1 Н /(1 м х 1 А) .
Направление действия электромагнитной силы F определяют по правилу левой руки: ладонь левой руки нужно расположить так, чтобы магнитные линии входили в нее, и четыре вытянутых пальца совместить с направлением тока; тогда расположенный под углом большой палец укажет направление действия силы F .
Если вместо проводника поместить в магнитное поле виток с током и применить к нему правило левой руки, получим, что электромагнитные силы F, действующие на нижнюю и верхнюю стороны витка, будут направлены в разные стороны (рис.2.1,в). В результате действия этих двух сил возникает электромагнитный вращающий момент М на плече D. cosα
М=F. D. cosα, Н. м, (2.2)
где D - расстояние между сторонами витка;
α - угол между направлениями линий магнитного поля и плоскости витка.
Наибольший вращающий момент будет иметь место, когда виток с током пересекает линии магнитного поля (α=0о ,180о ), а наименьший - когда через площадь, ограниченную витком, проходит наибольший магнитный поток (α=90о ,270о ).
Свойство рамки с током поворачиваться в магнитном поле лежит в основе создания электродвигателей, преобразующих электрическую энергию в механическую.
При пересечении проводником магнитных силовых линий в нем возникает или индуцируется электродвижущая сила (ЭДС). Это явление носит название электромагнитной индукции.
ЭДС, действующая в проводнике, представляет собой разность потенциалов на его концах и, следовательно, измеряется в вольтах (В).
ЭДС индуцируется в проводнике независимо от того, включен ли он в замкнутую цепь или нет. При замыкании цепи проводника в нем потечет электрический ток, вызванный ЭДС.
Явление электромагнитной индукции лежит в основе создания генераторов - электрических машин для преобразования механической энергии в электрическую.
Значение ЭДС, индуцированной в проводнике, определяется законом электромагнитной индукции Фарадея: ЭДС, наведенная в проводнике, прямо пропорциональна индукции магнитного поля В, длине проводника L и скорости его перемещения в направлении, перпендикулярном силовым линиям .
Направление ЭДС индукции определяют по правилу правой руки: если ладонь правой руки держать так, чтобы в нее входили магнитные силовые линии поля, а отогнутый большой палец совместить с направлением движения проводника, то вытянутые четыре пальца укажут направление индуцированной ЭДС.
В проводниках витка, движущихся в магнитном поле с постоянной окружной скоростью V, наводится ЭДС, переменная как по величине, так и по направлению (рис.2.2):
е=B. V. L. cosα, В, (2.3)
где α - угол между направлениями линий магнитного поля и плоскости витка.
При α=0о ,180о проводники I и II движутся перпендикулярно силовым линиям магнитного поля; в этом положении витка разность потенциалов на его концах А и Б, то есть ЭДС, максимальна. При α=90о ,270о проводники I и II перемещаются вдоль силовых линий поля, поэтому ЭДС в витке равна нулю.
В момент прохождения углов α=90о ,270о изменяются направления движения проводников I и II относительно линий магнитного поля. Поэтому, в соответствии с правилом правой руки, изменяется направление ЭДС в витке и, следовательно, полярность его концов А и Б (см. рис.2.2).
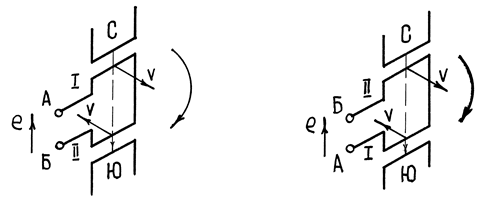 |
Рис.2.2. Электродвижущая сила в витке, вращающемся в магнитном поле
Таким образом, в витке с током, находящемся в переменном магнитном поле, возникает электродвижущая сила. Одновременно на проводники витка действуют электромагнитные силы. Эти процессы являются основой функционирования электрических машин, то есть устройств для взаимного преобразования электрической и механической энергий.
Неразрывная связь электромагнитных явлений, вызванных взаимодействием магнитных полей полюсов и витка с током, обусловливает свойство обратимости электрических машин постоянного тока . Оно заключается в том, что любая машина может работать как генератором, так и двигателем и может переходить из генераторного режима в двигательный и наоборот. Указанное свойство широко используется на локомотивах. Например, на тепловозах тяговый генератор работает в режиме двигателя (стартера) при запуске дизеля, а тяговый двигатель - в режиме генератора при электродинамическом торможении [2].
В связи с наличием у электрических машин постоянного тока свойства обратимости, принцип действия машины более подробно рассмотрим на примере электродвигателя.
Принцип действия и общее устройство электродвигателя постоянного тока
Электродвигатель - это электрическая машина, предназначенная для преобразования электрической энергии в механическую. Если двигатель получает питание напряжением постоянной полярности, то он называется двигателем постоянного тока .
Простейшая схема такого двигателя приведена на рис.2.3, где в двухполюсной магнитной системе расположена обмотка якоря (показаны два последовательно соединенных элементарных проводника, образующих виток, концы которого подключены к двум пластинам коллектора К1 и К2 ). Подвод напряжения к коллектору осуществляется щетками Щ1 и Щ2 .
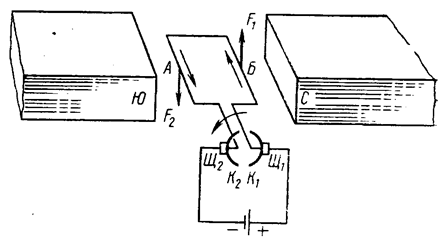
Рис.2.3. Схема простейшего электродвигателя постоянного тока
Непрерывное взаимодействие магнитного поля, создаваемого полюсами С и Ю, и магнитного поля якоря, возникающего при протекании по его обмотке тока Iд , обусловливает возникновение электромагнитных сил F1 , F2 и вращающего момента на валу якоря. Одновременно в якорной обмотке индуцируется ЭДС, которая направлена, в соответствии с правилом правой руки, навстречу подводимому к двигателю напряжению (эту ЭДС иногда называют противо-ЭДС двигателя ).
Таким образом, подводимое к электродвигателю напряжение стремится создать ток в обмотке якоря, чему препятствует индуцируемая ЭДС. Поэтому величина тока Iд в обмотке якоря работающего электродвигателя будет определяться не подводимым к ней напряжением Uд , а разностью между напряжением и наведенной в обмотке якоря ЭДС Ед :
Iд =(Uд -Eд )/Rд , А, (2.4)
где Rд - суммарное сопротивление якорной цепи, Ом.
Из рис.2.3 видно, что ток Iд в якорной обмотке направлен от коллекторной пластины К1 (щетка Щ1 «+») к коллекторной пластине К2 (щетка Щ2 «-»). При повороте витка на угол 180о пластина К1 переходит под щетку Щ2 «-», а пластина К2 - под щетку Щ1 «+». Это приводит к изменению направления тока в витке на противоположное - от пластины К2 к пластине К1 . Одновременно в витке меняется направление ЭДС индукции (в соответствии с правилом правой руки). Такое переключение направления тока в витке якорной обмотки происходит при каждом переходе элементарного проводника из зоны действия северного полюса С в зону действия южного полюса Ю и наоборот. Процесс переключения, называемый коммутацией , осуществляется коллекторно-щеточным узлом.
Следовательно, коллектор электродвигателя преобразует постоянный ток внешней цепи в переменный ток якорной обмотки. Примечательно, что коллектор электрического генератора постоянного тока преобразует переменный ток якорной обмотки в постоянный ток внешней цепи, то есть служит механическим выпрямителем.
Количество коллекторных пластин зависит от характеристик обмотки якоря, которая состоит из множества витков, соединенных друг с другом и с пластинами коллектора по определенной схеме. К числу характеристик якорной обмотки относят [1]:
количество проводников якорной обмотки N;
число параллельных ветвей обмотки 2а.
Кроме того, конструкцию электрической машины постоянного тока характеризует такой параметр, как число главных полюсов 2р.
Главные полюсы обеспечивают создание рабочего магнитного поля в электромашине. Для усиления и регулирования магнитной индукции поля В в качестве главных полюсов используют электромагниты. Обмотки электромагнитов называют обмотками возбуждения , а ток, протекающий по ним, - током возбуждения . С увеличением тока возбуждения возрастает магнитная индукция поля В и магнитный поток возбуждения Ф (величины Ф и В прямо пропорциональны друг другу).
Помимо главных полюсов, в конструкции мощных электродвигателей предусмотрены добавочные полюса, действие которых улучшает процессы коммутации. Обмотки этих полюсов включают последовательно с якорной обмоткой.
Главные и добавочные полюсы, остов, якорь и воздушный зазор между якорем и полюсами образуют магнитную цепь двигателя (рис.2.4.).
В качестве тяговых электродвигателей на отечественных локомотивах обычно используют двигатели постоянного тока последовательного возбуждения . В двигателях этого типа обмотки главных, дополнительных полюсов и якоря соединены последовательно (рис.2.5, а). Иногда на электрических схемах обмотку якоря электродвигателя совмещают с обмоткой дополнительных полюсов (рис. 2.5, б).
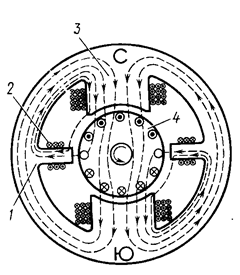
Рис.2.4. Магнитная цепь электродвигателя постоянного тока. 1 – добавочный полюс; 2 – обмотка возбуждения добавочного полюса; 3 – главный полюс с обмоткой возбуждения; 4 – якорь с рабочей (якорной) обмоткой
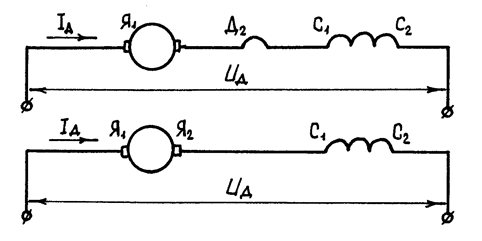
Рис.2.5. Графическое изображение двигателей в электрических схемах
Я1 -Д2 - обмотка якоря и добавочных полюсов;
С1 -С2 - обмотка возбуждения главных полюсов
Реверсирование тягового двигателя , то есть изменение направления вращения его якоря, можно осуществить путем изменения направления тока в обмотках возбуждения Iв либо в обмотке якоря Iд . На локомотивах нашел применение первый из этих способов – изменением направления тока в обмотках возбуждения, которое осуществляют с помощью специального электрического аппарата - реверсора (рис.2.6).
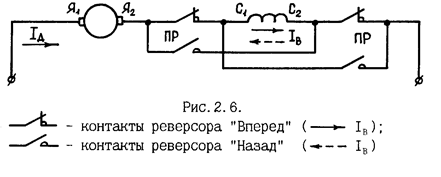
Рис. 2.6. Схема реверсирования тягового двигателя локомотива
При одновременном изменении направления тока в обмотках якоря и главных полюсов направление вращения вала электродвигателя не меняется.
Основные параметры и показатели работы электрических двигателей
Одним из наиболее важных параметров электродвигателя является его мощность . Чем большую мощность развивает электродвигатель, тем больший ток проходит по его обмоткам и, в соответствии с законом Джоуля-Ленца, больше тепла выделяется в проводниках. В результате теплового действия тока обмотки и другие детали двигателя нагреваются, их температура становится выше температуры окружающей среды.
Предельно допустимые превышения температур частей электрических машин по отношению к температуре окружающей среды не должны превышать норм, регламентированных ГОСТом. В зависимости от времени, в течение которого части двигателя, работающего в условиях нормально действующей вентиляции, нагреваются до максимально допустимой температуры, ввели понятия продолжительной и часовой мощности [3].
Продолжительной называют наибольшую мощность, которую может развивать двигатель в течение неограниченного времени без повышения температуры частей двигателя сверх максимально допустимого значения.
Под часовой понимают наибольшую мощность, которую может развивать двигатель в течение одного часа без повышения температуры частей двигателя сверх максимально допустимого значения. При этом полагают, что температура частей двигателя в начале испытания равна температуре окружающей среды, которую считают равной 25о С.
Параметры электрической машины: напряжение, сила тока, частота вращения вала якоря, к.п.д. - соответствующие работе при продолжительной мощности, называют длительными , а реализуемые при часовой мощности - часовыми . Обычно технические данные тяговых двигателей электровозов приводят для двух режимов: продолжительного и часового [3], а тяговых двигателей тепловозов - для одного режима: продолжительного [4]. Поэтому далее будем считать, что номинальным режимом работы тяговых электромашин тепловозов является продолжительный режим, а электровозов - часовой.
Мощность электрического двигателя, развиваемая на номинальном режиме
Рдн =Uдн . Iдн . ηдн . 10-3 , кВт, (2.5)
где Uдн ,Iдн , ηдн - номинальные значения напряжения, силы тока и к.п.д. двигателя.
Значение к.п.д. ηдн , оценивающее потери энергии при работе машины, для локомотивных тяговых двигателей составляет 90-94%.
Различают три составляющие потерь энергии в электрической машине: электрические, магнитные и механические. Электрические потери в двигателе обусловлены сопротивлением обмоток якоря и полюсов, а также коллекторно-щеточного узла прохождению тока. Магнитные потери обусловлены возникновением вихревых токов Фуко в массивных деталях двигателя, сопротивлением магнитному потоку воздушных промежутков в магнитной цепи электродвигателя и гистерезисом. Механические потери связаны с трением в подшипниковых узлах и аэродинамическим сопротивлением, возникающими при вращении якоря.
Режим работы электродвигателя, при котором величина силы тока превышает допустимые значения, называется перегрузочным. Он ведет к сокращению срока службы электрической машины вследствие перегрева и снижения прочности изоляции ее обмоток.
В соответствии с формулой (2.4), значение силы тока в якорных обмотках двигателя Iд взаимосвязано с режимами работы локомотива, а также характеристиками электродвигателя. Зависимость между напряжением Uд , приложенным к двигателю, и силой тока Iд определяется законами Ома и Кирхгофа:
Uд =Eд +Iд . Rд , В, (2.6)
где Eд - ЭДС, индуцируемая в якорной обмотке, В;
Iд . Rд - падение напряжения в электродвигателе при прохождении по нему тока (составляет примерно 0,04. Uд) , В;
Rд - суммарное сопротивление якорной цепи двигателя, Ом.
Фундаментальные законы физики: законы Ампера (2.1),(2.2) и Фарадея (2.3), - рассмотренные в п.2.1 применительно к отдельному витку (проводнику), для электрического двигателя со сложной якорной обмоткой имеют вид:
Ед = Се . Фд . nд , В; (2.7)
Мэ =См . Фд . Iд , Н. м, (2.8)
где Мэ - электромагнитный момент на валу двигателя (вращающий момент без учета механических потерь в двигателе);
Фд - магнитный поток возбуждения двигателя, Вб;
nд - частота вращения вала якоря, об/мин;
Се
,См
- конструктивные постоянные двигателя для расчета ЭДС и
вращающего момента соответственно.
Се =(p. N)/(60. a); (2.9)
См =(p. N)/(2. p. a), (2.10)
где р - число пар главных полюсов двигателя;
N - количество проводников якорной обмотки;
а - число пар параллельных ветвей якорной обмотки.
Формулы (2.5)-(2.10) создают основу для расчетов рабочих характеристик электродвигателей (раздел 5).
Принцип действия асинхронного двигателя
Если к зажимам трехфазной статорной обмотки подвести трехфазное напряжение, то по статорной обмотке будет протекать трехфазный переменный ток, который создаст вращающееся магнитное поле статора. Это поле будет пересекать проводники роторной обмотки и индуцировать в них ЭДС. При этом в замкнутой роторной обмотке возникнут токи. Силы, действующие на эти токи со стороны поля статора, создадут вращательный момент и ротор начнет вращаться в сторону вращения поля статора. По мере разгона ротора уменьшается скорость относительного движения ротора и поля статора, уменьшаются токи в роторной обмотке и, как следствие, уменьшается вращающий момент. Если предположить, что частота вращения ротора достигнет частоты вращения поля статора, то поле статора и ротор окажутся неподвижны друг относительно друга и вращающий момент станет равным нулю, т.к. тока в роторной обмотке не будет. Следовательно, частота вращения ротора п будет всегда меньше частоты вращения поля статора по . Т.е. ротор вращается с асинхронной скоростью, которая автоматически устанавливается такой, чтобы вращающий момент равнялся тормозному моменту, создаваемому механической нагрузкой на валу ротора. Чем больше тормозной момент, тем меньше частота вращения ротора, что приводит к увеличению тока в роторной обмотке и, как следствие, к увеличению вращающего момента до тех пор, пока вращающий момент не станет равным тормозному моменту. Число (обычно выраженное в процентах), показывающее, во сколько раз относительная частота вращения ротора, равная по – п , меньше частоты вращения поля статора, называется скольжением и обозначается s . Таким образом:
![]() , или в процентах
, или в процентах ![]() 100%
(7.2)
100%
(7.2)
Отсюда ![]() (7.3)
(7.3)
Частота ЭДС, которая индуцируется вращающимся магнитным полем статора в обмотке ротора, зависит от скольжения и определяется по формуле
![]() , (7.4)
, (7.4)
где f 1 – частота напряжения питающей сети
2.2 Принцип действия синхронного генератора
Постоянный магнитный поток, создаваемый током в обмотке возбуждения ротора, замыкается через сердечник ротора, воздушный зазор и сердечник статора. При вращении ротора каким-либо приводом с некоторой частотой n с этой же частотой будет вращаться и магнитное поле ротора. Пересекая проводники трехфазной статорной обмотки, это поле индуцирует в ней трехфазную ЭДС, изменяющуюся с частотой:
![]() , (7.7)
, (7.7)
где р – число пар полюсов ротора
При подключении к обмотке статора трехфазной нагрузки проходящий по обмотке статора ток создает вращающееся магнитное поле статора, частота вращения которого определяется по формуле (7.1). Число пар полюсов ротора и число пар полюсов статорной обмотки одинаково, поэтому из сравнения формул (7.1) и (7.7) видно, что n 0 = n , т.е. частота вращения поля статора равна частоте вращения ротора. Поэтому машина называется синхронной.
2.3 Трансформаторы
Назначение и устройство. Трансформатором называется статическое электромагнитное устройство, предназначенное для преобразования переменного тока одного напряжения в переменный ток другого напряжения при неизменной частоте. Увеличение напряжения осуществляется с помощью повышающих трансформаторов , уменьшение – понижающих.
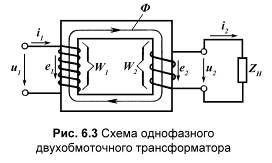
Принцип действия. Принцип действия трансформатора, основанный на явлении взаимоиндукции, рассмотрим на примере однофазного двухобмоточного трансформатора (рис. 6.3). Если на первичную обмотку с числом витков W 1 подать переменное напряжение u 1 , то протекающий по обмотке переменный ток i 1 создаст в магнитопроводе переменный магнитный поток Ф , пронизывающий обе обмотки трансформатора и индуцирующий в них переменные ЭДС е1 и е2 . Если ко вторичной обмотке подключить нагрузку, то под действием ЭДС е2 в цепи вторичной обмотки будет протекать переменный ток i 2 . Отношение ЭДС, равное отношению числу витков первичной и вторичной обмоток называется коэффициентом трансформации трансформатора :
![]() (6.1)
(6.1)
Пренебрегая незначительными падениями напряжения в обмотках, отношение ЭДС можно заменить отношением напряжений:
![]() (6.2)
(6.2)
Следовательно, у повышающих трансформаторов k <1 , а у понижающих трансформаторов k >1 .
Преобразование энергии в трансформаторах происходит с незначительными потерями, и подводимая к трансформатору полная мощность ![]() приблизительно равна отдаваемой полной мощности
приблизительно равна отдаваемой полной мощности ![]() . Откуда
. Откуда ![]() , т.е.
, т.е.
![]() (6.3)
(6.3)
Следовательно, по обмотке ВН протекает ток примерно в k раз меньший, чем по обмотке НН.
Учитывая это, обмотку ВН, имеющую большее число витков, выполняют проводом меньшего сечения, чем обмотку НН
3. Создание силы тяги локомотива
В локомотивах образование движущей силы (силы тяги) происходит вследствие взаимодействия колесных пар с рельсами за счет вращающего момента, создаваемого тяговым двигателем (рис.3.1). К колесной паре 1 приложен вращающий момент Мк , который передается от двигателя 2 через зубчатый редуктор, состоящий из шестерни 3 и зубчатого колеса 4. Шестерня 3 закреплена на валу ТЭД, а зубчатое колесо 4 - на оси колесной пары.
Вращающий момент на колесной паре равен
Мк =Мд . μ. ηз , Н. м, (3.1)
где Мд - момент на валу двигателя, Н. м;
μ - передаточное число зубчатой передачи;
ηз - коэффициент полезного действия зубчатой передачи.
Момент Мк обычно представляют в виде пары сил F1 и F2 с плечом Dк /2, одна из которых (F1 ) приложена к ободу колеса в точке касания с рельсом (точка А), а другая (F2 ) - к оси колесной пары. Поскольку силы F1 и F2 , действующие на колесную пару, равны по величине и противоположно направлены, то они уравновешивают друг друга и не вызывают поступательного движения колес.
Очевидно, что поступательное движение колесной пары будет возможно в том случае, если скомпенсировать действие силы F1 какой-либо дополнительной силой и нарушить тем самым баланс сил F1 и F2 . Подобная ситуация возникает, когда колесная пара (далее для сокращения - колесо) контактирует с рельсом и прижата к нему силой тяжести Gт .
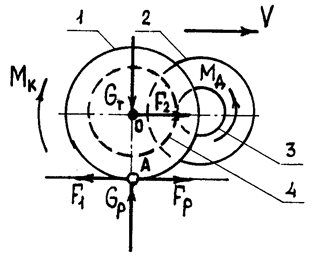
Рис.3.1. Образование силы тяги. 1 - колесная пара; 2 - тяговый электродвигатель; 3 - шестерня; 4 - большое зубчатое колесо
Сила тяжести Gт , приходящаяся на одну ось локомотива, приложена к колесу и через точку контакта А действует на рельс (рис.6.1). Реакция рельса на колесо Gр по III закону Ньютона равна значению силы тяжести Gт по модулю и противоположна ей по направлению. Указанные силы, действующие на колесо в вертикальной плоскости, уравновешивают друг друга.
В горизонтальной плоскости к ободу колеса приложена сила F1 , которая, как и сила тяжести Gт , через точку контакта А действует на рельс (сила F1 направлена вдоль поверхности рельсов, поэтому в случае их ненадежного крепления имеет место явление, известное как "угон пути"). Реакция рельса Fр по III закону Ньютона равна силе F1 по модулю и противоположна ей по направлению. Поэтому силы F1 и Fр , действующие на колесо в точке А, уравновешивают друг друга. Сила F2 остается неуравновешенной, что вызывает качение колеса и его поступательное движение относительно рельса.
Следовательно, движущей силой (силой тяги) колесной пары является сила F2 , развиваемая тяговым двигателем. Для удобства расчета ее значений, на практике в качестве силы тяги условились считать силу реакции рельса Fр , равную по величине силам F1 и F2 [11]. При этом значения сил определяют, рассматривая равенство моментов
Fр . Dк /2=Mк ,
из которого следует, что F2 = Fр = 2. Мк /Dк = 2. Мд . μ. ηз /Dк , Н.
Отметим, что данное уравнение было использовано при построении электротяговых характеристик локомотивов для расчета силы тяги ТЭД на ободе колеса Fкд
Поскольку сила Fр действует по касательной к колесу, ее называют касательной силой тяги . Для локомотива в целом касательную силу тяги Fк можно определить как
Fк = nос . Fр = m. Fкд , Н, (3.2)
где nос - число движущих осей локомотива;
m - количество тяговых электродвигателей на локомотиве.
Таким образом, качение колесной пары по рельсу происходит, если к ней приложена пара сил F1 и F2 (вращающий момент от тягового двигателя) и сила F1 уравновешена реакцией рельса Fр . Сформулируем особенности силы Fр как касательной силы тяги:
сила Fр , будучи силой реакции , возникает только под действием силы F1 , равна ей по модулю и поэтому пропорциональна величине вращающего момента ТЭД Мд ;
реакция Fр , будучи по природе силой трения , возникает при наличии контакта колеса с рельсом и силы, прижимающей их друг к другу (силы тяжести); уровень силы Fр не может превосходить некоторой максимальной величины, которую называют силой сцепления колес с рельсами Fсц .
Итак, касательная сила тяги - это сила реакции рельса на колесо, возникающая под действием внешнего вращающего момента и ограниченная силой сцепления колеса с рельсом.
При увеличении вращающего момента на колесе Мк касательная сила тяги Fр , равная силе тяги ТЭД Fкд , возрастает вплоть до уровня, соответствующего силе сцепления Fсц (зона I на рис.3.2). Дальнейшее повышение момента Мк (зона II) приводит к нарушению условия качения колеса F1 =Fр . Сила F1 , равная Fкд , не уравновешивается силой Fр , равной Fсц . В результате происходит срыв сцепления и начинается боксование, то есть проскальзывание колеса относительно поверхности рельса, при котором частота вращения якоря ТЭД nд резко увеличивается.
Зависимость касательной силы тяги Fр от силы тяги ТЭД Fкд и силы сцепления колеса с рельсом Fсц
|
|
|
| Рис.3.2. |
|
|
|
- касательная сила тяги Fр ; - сила тяги, развиваемая ТЭД, Fкд =F1 ; - сила сцепления колеса с рельсом Fсц |
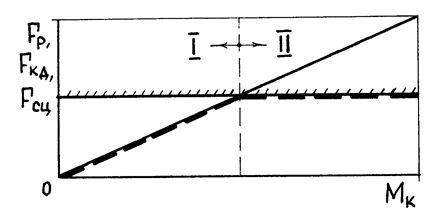

Боксование приводит к интенсивному износу рабочих поверхностей колеса и рельса, разрушению вращающихся деталей якоря ТЭД под действием центробежных сил, возникновению кругового огня на коллекторе ТЭД и другим опасным явлениям. Чтобы не допускать их, установлены технические условия устойчивого движения локомотива, которые описываются неравенством [11]
Fкmax
![]() ψо
.
Pсц
, (3.3)
ψо
.
Pсц
, (3.3)
где Fкmax - максимально допустимая касательная сила тяги локомотива;
ψо - потенциальный (максимальный) коэффициент сцепления;
Pсц - сцепной вес локомотива (вес, приходящийся на движущие колесные пары и участвующий в создании силы тяги).
Pсц = 9,81. nос . 2П, кН, (3.4)
где 2П - осевая нагрузка локомотива, т (исходные данные).
Неравенство (3.3) выражает основной закон локомотивной тяги: для обеспечения устойчивости управляемого движения локомотива окружные усилия на ободах движущих колес, создаваемые тяговыми двигателями, не должны превосходить силу сцепления колес с рельсами.
Коэффициент сцепления, а следовательно и сила сцепления, являются случайными величинами, на которые оказывают влияние многочисленные факторы: качество ремонта и содержания локомотивов, метеорологические условия поездки, текущее состояние пути и др. Для локомотивов одной серии при одинаковой скорости движения разброс возможных значений коэффициента сцепления относительно его среднего значения достигает ![]() 50% .
50% .
Поэтому для обеспечения устойчивости локомотивов против боксования устанавливают так называемый расчетный коэффициент сцепления ψк , величина которого меньше потенциального ψо . При этом сила тяги по сцеплению составляет
Fксц = ψк . Pсц , кН. (3.5)
Расчетный (нормативный) коэффициент сцепления локомотива ψк определяют экспериментальным путем и задают так, чтобы обеспечить практически приемлемую надежность движения полновесных поездов (поездов расчетной массы) по тяжелым подъемам при плохих условиях сцепления.
4. Назначение и конструкция тяговых электродвигателей локомотивов
4.1. Назначение тяговых электродвигателей
Тяговый электродвигатель (ТЭД) локомотива предназначен для преобразования электрической энергии в механическую, необходимую для вращения колесной пары.
Источником электроэнергии для движения тепловоза - автономного локомотива - служит дизель-генераторная установка (рис.3.1). Механическая энергия вращения коленчатого вала дизеля Д сообщается тяговому генератору ТГ и преобразуется в электрическую. Электрическая энергия от генератора поступает в тяговые электрические двигатели ТЭД, которые кинематически связаны с движущими колесными парами КП и приводят их во вращение.
На неавтономных локомотивах, которыми являются электровозы , для питания тяговых двигателей используется электроэнергия, вырабатываемая на электростанциях и передаваемая ТЭД по линиям электропередачи через тяговые подстанции и контактную сеть. Будучи подключенным к электростанции, то есть практически неограниченному источнику энергии, электровоз может развивать повышенную мощность, ограниченную только мощностью ТЭД. Поэтому мощность электровоза почти в 2 раза больше, чем тепловоза равной массы.
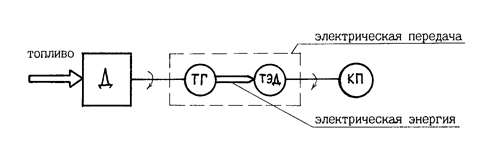
Рис.4.1. Схема преобразования энергии на тепловозе
На всех локомотивах привод колесной пары от ТЭД осуществляется через зубчатый редуктор колесно-моторного блока. Наиболее распространенным в настоящее время типом подвешивания ТЭД у грузовых тепловозов и электровозов является опорно-осевое подвешивание, при котором ТЭД с одной стороны опирается на ось колесной пары через моторно-осевые подшипники, а с другой стороны - на раму тележки через комплект пружин [7]. Неизменное расстояние между центрами вала двигателя и оси колесной пары называют централью Ц (рис.4.2).
Так как ТЭД служит для преобразования электрической энергии в механическую, то он входит в состав как электрической, так и механической части локомотива.
4.2. Конструкция основных узлов и элементов тягового электрического двигателя тепловоза
ТЭД постоянного тока состоит из неподвижного статора: остова с расположенными на его внутренней поверхности главными и добавочными полюсами - и вращающегося якоря (ротора). Вал якоря опирается на подшипниковые узлы, размещенные в статоре (рис.4.3).
Конструктивно двигатель образован следующими сборочными единицами: магнитная система (в корпусе которой также закреплены щеткодержатели со щетками), якорь, подшипниковые щиты с якорными подшипниками, моторно-осевые подшипники и др..
Магнитная система двигателя состоит из станины (остова), четырех главных и четырех добавочных полюсов.
Остов является магнитопроводом двигателя; он отлит из углеродистой стали и имеет восьмигранную или круглую форму. С торцов остова расположены расточки для подшипниковых щитов. На остове имеются два прилива (носика) для опоры ТЭД на тележку через пружинную подвеску. С противоположной стороны остов имеет расточки под моторно-осевые подшипники. В верхней части остова со стороны коллектора находится вентиляционный люк, через который подводится воздух, охлаждающий обмотки и детали двигателя.
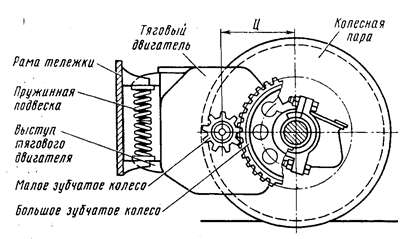
Рис.4.2. Схема колесно-моторного блока локомотива с опорно-осевым подвешиванием ТЭД
Главный полюс состоит из стального сердечника и катушки, намотанной из шинной меди в два слоя (плашмя). Витки катушки изолированы друг от друга асбестовой электроизоляционной бумагой.
Для уменьшения нагрева главных полюсов, вызываемого воздействием вихревых токов, сердечники набирают из отдельных листов электротехнической стали. Собранные листы спрессовывают и соединяют заклепками. В отверстие листов запрессовывают стальной прямоугольный стержень, в который вворачивают болты, крепящие полюса к остову.
Добавочные полюсы обеспечивают улучшение процессов коммутации (снижение искрения) при работе коллекторно-щеточного узла ТЭД. По своим размерам они меньше главных и несколько отличаются от них по конструкции (в частности, сердечник добавочного полюса цельный, отлитый из стали).
Обмотки возбуждения добавочных полюсов включены последовательно с якорной обмоткой. Обмотки возбуждения главных полюсов соединены между собой так, чтобы полюса (северный и южный) чередовались между собой (рис.4.4). Катушки добавочных полюсов соединены гибкими проводами, а главных - шинами из медной ленты, изолированными асбестовой, резиновой и стеклянной лентами .
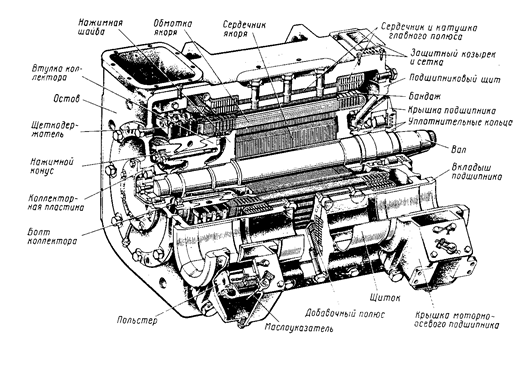
Рис.4.3.
Якорь электродвигателя состоит из стального сердечника и коллектора, насаженных на вал двигателя. На конец вала напрессовано малое зубчатое колесо (шестерня), передающее вращающий момент от двигателя через зубчатую передачу на колесную пару.
Сердечник якоря набран из листов электротехнической стали, толщиной 0,5 мм. По торцам сердечник удерживается на валу нажимными шайбами, которые установлены на вал с большим натягом.
На окружности сердечника якоря расположены продольные пазы, в которых размещены изолированные проводники якорной обмотки, закрепленные стеклотекстолитовыми клиньями. Клинья предотвращают перемещение проводников в пазах под действием центробежных сил, возникающих при вращении якоря. Лобовые части обмотки якоря (передние и задние) закреплены бандажами из стеклобандажной ленты. В последнее время начинают применять стеклометаллические бандажи.
Чтобы повысить электрическую и механическую прочность изоляции обмоток, якорь и полюса пропитывают в лаке ПЭ-933 (полиэфирноэпоксидном).
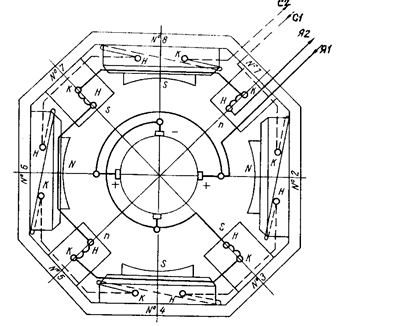
Рис.4.4. Схема соединения обмоток тягового электродвигателя
Для соединения проводников обмотки якоря с источником электроэнергии служит коллекторно-щеточный узел .
Коллектор состоит из медных пластин клинообразного сечения, изолированных друг от друга миканитовыми прокладками. Эти пластины набирают на коллекторной втулке, которую после формирования коллектора насаживают на вал электродвигателя. К каждой коллекторной пластине припаяны проводники якорной обмотки, укладываемые в пазы сердечника якоря по определенной схеме.
Коллектор, соединен с внешней цепью, через угольно-графитовые стержни, называемые щетками. Щетки устанавливают в специальные обоймы (щеткодержатели), кронштейны которых закрепляют на остове ТЭД через изоляторы. Для надежного контакта щеток с поверхностью коллектора служит пружинное нажимное устройство.
Вал якоря ТЭД, изготовленный из высококачественной стали, вращается в двух роликовых подшипниках, запрессованных в ступицы подшипниковых щитов . В подшипниковом щите, расположенном со стороны коллектора, устанавливают опорно-упорный подшипник, а с противоположной стороны - опорный. В полости подшипников, закрытых крышками, по специальным трубкам запрессовывают смазку.
Отличительной особенностью тяговых двигателей локомотивов является наличие моторно-осевых подшипников (МОП) , которые служат опорой электродвигателя на ось колесной пары. МОП вмонтированы в специальные разъемные приливы остова двигателя и состоят из бронзовых вкладышей, смазочного устройства и крышки, закрепленной болтами. Крышка МОП служит резервуаром для смазки, которая подается к вкладышам подшипника при помощи специальных систем: циркуляционной (смазка под давлением с использованием шестеренчатого насоса) и польстерной (смазка с использованием войлочных фитилей). В зависимости от конструкции ТЭД, данные системы могут использоваться как поодиночке, так и совместно.
В заключение рассмотрим особенности системы, которая обеспечивает нормальную работу тяговых двигателей - системы охлаждения . Во время работы ТЭД обмотка якоря и другие детали нагреваются. Для их охлаждения применяют принудительную вентиляцию (рис.4.5).
Охлаждающий воздух, подаваемый специальным вентилятором по гибким рукавам-гармошкам к вентиляционному люку остова ТЭД, проходит через двигатель двумя потоками: один над коллектором, сердечником якоря и в зазорах между полюсами, другой под коллектором, через вентиляционные отверстия в сердечнике якоря. Оба потока соединяются в корпусе ТЭД со стороны, противоположной коллектору, и выходят наружу через специальные окна (люки).
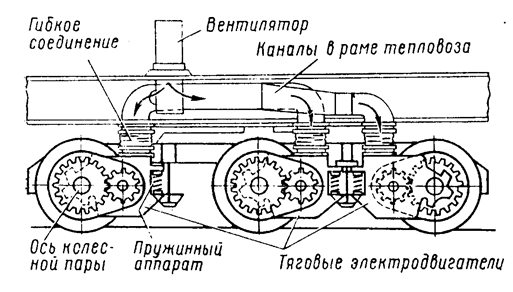
Рис.4.5 Схема охлаждения тяговых электродвигателей на локомотивах
Внутри остова ТЭД поддерживается небольшое избыточное давление воздуха, препятствующее попаданию пыли, влаги, снега.
Вентиляторы охлаждения ТЭД могут иметь механический привод от дизеля или электрический от специальных электродвигателей (мотор-вентиляторы). Обычно один вентилятор охлаждает несколько тяговых двигателей, установленных на одной тележке. На некоторых тепловозах применяют централизованную систему охлаждения тяговых электрических машин и аппаратов.
5. Расчетная часть курсового проекта
Для тягового привода рабочими называют: электромеханические характеристики тягового электродвигателя: скоростную nд =f(Iд ), моментную Mд =f(Iд ) и характеристику к.п.д. ηд =f(Iд ); электротяговые характеристики Fкд =f(Iд ), V=f(Iд ).
5.1 Определение параметров ТЭД на номинальном режиме
Электромеханические характеристики отражают изменение механических параметров nд и Мд на валу двигателя в зависимости от силы тока Iд . Моментную характеристику ТЭД Мд =f(Iд ) рассчитывают, с учетом формулы (2.8), по выражению
Мд =См . Фд . Iд . ηм , Н. м, (5.1)
где Мд - вращающий момент на валу ТЭД;
ηм - механический к.п.д. двигателя, равный 0,96-0,98.
Скоростная характеристика nд =f(Iд ) определяется из уравнений (2.6) и (2.7), характеризующих состояние электрической цепи ТЭД:
nд =(Uд -Iд . Rд )/(Cе . Фд )
или, принимая Iд . Rд ≈ 0,04. Uд ,
nд =0,96. Uд /(Cе . Фд ), об/мин. (5.2)
Последовательность расчета электромеханических характеристик включает в себя ряд этапов
1) Определение значений коэффициентов Се и См по формулам (2.9) и (2.10) в соответствии с исходными данными ТЭД.
![]()
2) Вычисление силы тока ТЭД на номинальном режиме работы
Iдн =Рдн /(Uдн . ηдн ). 103 , А, (5.3)
где Uдн , Рдн , ηдн - номинальные значения напряжения, мощности и к.п.д. двигателя (исходные данные ТЭД).
Величину ηдн можно принять равной 0,90-0,92 для тепловоза.
![]()
3) Расчет магнитного потока возбуждения ТЭД на номинальном режиме работы
Фдн =0,96. Uдн /(Cе . nдн ), Вб, (5.4)
где nдн - номинальная частота вращения вала ТЭД, об/мин.
![]()
5.2. Расчет характеристики намагничивания ТЭД при различных режимах нагрузки и возбуждения
При расчете электромеханических характеристик любого электродвигателя используют его магнитные характеристики (кривые намагничивания), то есть зависимости магнитного потока Фд от тока возбуждения Iв и тока якоря Iд . Их обычно представляют в виде графиков Фд =f(Iв ), построенных для различных величин тока якоря Iд , и называют нагрузочными характеристиками .
Для локомотивных ТЭД с последовательным возбуждением семейство нагрузочных характеристик Фд =f(Iв ,Iд ) можно заменить одной кривой Фд =f(Iв ), считая Iд =Iв [10]. Однако для определения этой зависимости, которую будем называть универсальной магнитной характеристикой ТЭД , необходимо провести расчеты его магнитной системы и взаимодействия магнитных полей полюсов и якоря. Учитывая, что эти вопросы подробно изучают в дисциплине "Электрические машины", в данной курсовой работе предлагается использовать безразмерные универсальные магнитные характеристики ТЭД.
Они представляют собой зависимости магнитного потока Фд от тока возбуждения Iв , выраженные относительно значений Фдн и Iвн на номинальном режиме работы ТЭД (табл. 5.1). Определение искомой зависимости Фд =f(Iв ) (в абсолютных величинах) осуществляют по точкам безразмерной характеристики путем пересчета по формулам
Фд =(Фд /Фдн ). Фдн , Вб; (5.5)
Iв =(Iв /Iвн ). Iвн , А, (5.6)
считая, что Iвн =Iдн .
Полученные координаты точек универсальной магнитной характеристики ТЭД необходимо занести в таблицу 5.2 и далее построить график Фд =f(Iв ) на миллиметровой бумаге (рис. 1).
Таблица 5.1.
Безразмерные универсальные магнитные характеристики
электровозных и тепловозных тяговых электродвигателей
| (Iв /Iвн )=(Iд /Iдн ) |
0,25 |
0,50 |
0,75 |
1,00 |
1,25 |
1,50 |
|
| (Фд /Фдн ) |
ТЭД электровоза |
0,50 |
0,72 |
0,88 |
1,00 |
1,07 |
1,11 |
| ТЭД тепловоза |
0,52 |
0,77 |
0,92 |
1,03 |
1,06 |
||
Таблица 5.2
|
|
0,04 |
0,06 |
0,07 |
0,076 |
0,078 |
0,08 |
|
|
185,2 |
370,35 |
555,53 |
740,7 |
925,88 |
1111 |
5) Расчет и построение зависимостей магнитного потока Фд от тока якоря Iд ТЭД при разных ступенях ослабления возбуждения.
При выполнении данного этапа следует заполнить таблицу 5.3. Значения Iд
целесообразно задать по точкам универсальной магнитной характеристики в диапазоне (0,25![]() 1,50).
Iдн
для электровозов и (0,50
1,50).
Iдн
для электровозов и (0,50![]() 1,50).
Iдн
для тепловозов. Величины тока возбуждения Iв
, соответствующие каждому значению тока Iд
, составляют
1,50).
Iдн
для тепловозов. Величины тока возбуждения Iв
, соответствующие каждому значению тока Iд
, составляют
Iв =α. Iд , А, (5.7)
где α - коэффициент ослабления возбуждения ТЭД.
В данной курсовой работе значения коэффициента α на первой (ОП1
) и второй (ОП2
) ступенях ослабления возбуждения следует принять равными α2
=0,3![]() 0,4 и α1
=
0,4 и α1
=![]() . Принимаем
. Принимаем ![]() ,
, ![]()
Значения магнитного потока Фд для каждого сочетания величин тока якоря Iд и коэффициента α можно приближенно определить по построенному ранее графику универсальной магнитной характеристики ТЭД Фд =f(Iв ) (рис. 1).
Полученные точки с координатами (Iд ,Фд ) необходимо нанести на миллиметровую бумагу и построить кривые намагничивания двигателя Фд =f(Iд ) для режимов возбуждения ПП, ОП1 и ОП2 (рис.2).
Таблица 5.3.
Кривые намагничивания ТЭД при разных режимах возбуждения
| Iд A |
185,2 |
370,4 |
555,5 |
740,7 |
925,9 |
1111 |
|
| ПП α=1,00 |
Iв , A |
185,2 |
370,4 |
555,5 |
740,7 |
925,9 |
1111 |
| Фд , Вб |
0,04 |
0,06 |
0,07 |
0,076 |
0,078 |
0,08 |
|
| ОП1 α2 =0,54 |
Iв , A |
100 |
200 |
300 |
400 |
500 |
600 |
| Фд , Вб |
0,026 |
0,042 |
0,052 |
0,062 |
0,067 |
0,071 |
|
| ОП2 α2 =0,3 |
Iв , A |
55,6 |
111,1 |
166,7 |
222,2 |
277,8 |
333,3 |
| Фд , Вб |
0,02 |
0,027 |
0,036 |
0,043 |
0,048 |
0,055 |
|
5.3.Расчет и построение внешней характеристики тягового генератора тепловоза
Для расчета электромеханических характеристик ТЭД, работающего на тепловозе, дополнительно необходимо построить внешнюю характеристику тягового генератора Uг =f(Iг ). Взаимосвязь токов и напряжений ТЭД и ТГ в данной курсовой работе можно считать следующей:
Uг =Uд ; (5.8)
Iг =m. Iд , (5.9)
где m - количество тяговых двигателей на тепловозе, равное числу его движущих осей nос (см. исходные данные).
Порядок построения внешней характеристики ТГ
а) рассчитать мощность ТГ в продолжительном (номинальном) режиме
Ргн = m. Рдн . 103 = Uгн . Iгн , Вт, (5.10)
где Uгн , Iгн - напряжение и ток ТГ на номинальном режиме;
![]()
б) определить максимальное напряжение ТГ
Uгmax =Uгн . kг , В (5.11)
и соответствующий ему минимальный ток ТГ
Iгmin =Pгн /Uгmax , А, (5.12)
где kг - коэффициент регулирования напряжения ТГ.
Значение kг
выбирают из диапазона 1,4![]() 1,8 так, чтобы величина напряжения Uгmax
не превышала 800 В;
1,8 так, чтобы величина напряжения Uгmax
не превышала 800 В;
в) определить максимальную силу тока ТГ
Iгmax
=(1,25![]() 1,45).
Iгн
, А (5.13)
1,45).
Iгн
, А (5.13)
и соответствующее ей минимальное напряжение ТГ
Uгmin =Pгн /Iгmax , В; (5.14)

г) рассчитать гиперболический участок внешней характеристики ТГ.
Для этого необходимо выбрать 5-7 значений тока ТГ в диапазоне Iгmin ≤ Iг ≤ Iгmax и определить соответствующие им величины напряжения ТГ как Uг =Pгн /Iг , В. Результаты следует занести в две верхние строки таблицы 5.4.
В крайние колонки таблицы необходимо внести координаты точек, которые ограничивают гиперболический участок, то есть (Iгmin , Uгmax ) и (Iгmax , Uгmin ).
д) построить координатную сетку с осями I, U и в ней нанести точки с координатами (Iгmin ,Uгmax ), (Iгн ,Uгн ) и (Iгmax ,Uгmin ).
Через точку с координатами (Iгmin ,Uгmax ) провести горизонтальную линию, соответствующую ограничению по напряжению ТГ.
Через точку с координатами (Iгmax ,Uгmin ) провести вертикальную линию, соответствующую ограничению по току ТГ.
Гиперболический участок внешней характеристики можно построить по данным верхней части таблицы 5.4. Полученная кривая обязательно должна пройти через точку продолжительного режима работы ТГ с координатами (Iгн ,Uгн ) (рис. 3).
8) Построенные внешняя характеристика ТГ Uг =f(Iг ) и кривые намагничивания ТЭД Фд =f(Iд ) позволяют рассчитать электромеханические характеристики ТЭД тепловоза по формулам (5.1), (5.2) с использованием соотношений (5.8) и (5.9).
Результаты вычислений следует оформить в виде таблицы 5.4, две верхние строки которой содержат точки гиперболического участка внешней характеристики ТГ.
По данным таблицы 5.4 можно построить искомые графики скоростной nд =f(Iд ) (рис.4) и моментной Mд =f(Iд ) (рис.5) характеристик ТЭД для различных режимов возбуждения.
Таблица 5.4
| IГ ,А |
2778 |
3000 |
3500 |
4000 |
4500 |
5000 |
5778 |
|
| UГ ,В |
768 |
711 |
609 |
533 |
474 |
426 |
369 |
|
| Iд ,А |
463 |
500 |
583 |
666 |
750 |
833 |
963 |
|
| ПП
|
Фд ,Вб |
0,066 |
0,067 |
0,07 |
0,073 |
0,075 |
0,077 |
0,08 |
| Мд ,Нм |
2310 |
2533 |
3085 |
3676 |
4253 |
4849 |
5824 |
|
| nд ,об/мин |
1059 |
966 |
791 |
664 |
575 |
503 |
420 |
|
| ОП1
|
Фд ,Вб |
0,047 |
0,05 |
0,054 |
0,057 |
0,061 |
0,064 |
0,067 |
| Мд ,Нм |
1645 |
1890 |
2380 |
2870 |
3459 |
4030 |
4878 |
|
| nд ,об/мин |
1487 |
1294 |
1027 |
851 |
707 |
606 |
501 |
|
| ОП2
|
Фд ,Вб |
0,033 |
0,035 |
0,037 |
0,04 |
0,043 |
0,046 |
0,05 |
| Мд ,Нм |
1155 |
1323 |
1630 |
2013 |
2438 |
2897 |
3640 |
|
| nд ,об/мин |
2118 |
1848 |
1498 |
1213 |
1018 |
843 |
672 |
|
5.3. Расчет и построение электромеханических и электрических тяговых характеристик ТЭД с учетом параметров КМБ
Электротяговые характеристики Fкд =f(Iд ) и V=f(Iд ) отражают изменение механических параметров на ободе колеса. Поэтому они также называются электромеханическими характеристиками ТЭД, отнесенными к ободу колеса локомотива.
Зависимость силы тяги Fкд на ободе колеса, развиваемой двигателем, от тока якоря Iд можно рассчитать по известной моментной характеристике Mд =f(Iд ) и параметрам колесно-моторного блока. При этом взаимная связь величин Fкд и Мд определяется соотношением
Fкд =2. Мд . μ. ηз /Dк , Н, (5.15)
где Dк - диаметр колеса локомотива по кругу катания, м;
μ - передаточное число зубчатой передачи колесно-моторного блока;
ηз - к.п.д. зубчатой передачи, равный 0,975.
Значения параметров μ и Dк принимаются в соответствии с заданием к курсовой работе.
Скоростная характеристика V=f(Iд ), отнесенная к ободу колеса, рассчитывается по электромеханической характеристике nд =f(Iд ) ТЭД с учетом того, что скорость движения локомотива принято выражать в км/ч:
V=0,188. nд . Dк /μ, км/ч. (5.16)
Результаты расчетов следует занести в таблицу 5.5.
Полученные электромеханические характеристики ТЭД, отнесенные к ободу колеса, необходимы для построения тяговых характеристик локомотивов.
Табл. 5.5 Электротяговые характеристики тягового привода локомотива
| Iд , A |
463 |
500 |
583 |
666 |
750 |
833 |
963 |
|
| ПП α=1,00 |
Fк д , кН |
18,5 |
20,3 |
24,7 |
29,4 |
34 |
38,8 |
46,6 |
| V, км/ч |
48,5 |
44,2 |
36,2 |
30,4 |
26,3 |
23 |
19,2 |
|
| ОП1 α1 =0,54 |
Fк д , кН |
13,2 |
15,1 |
19 |
23 |
27,7 |
32,2 |
39 |
| V, км/ч |
68,1 |
59,3 |
47 |
39 |
32,4 |
27,8 |
23 |
|
| ОП2 α2 =0,3 |
Fк д , кН |
9,24 |
10,6 |
13 |
16,1 |
19,5 |
23,2 |
29,1 |
| V, км/ч |
97 |
84,6 |
68,6 |
55,6 |
49,4 |
38,6 |
30,8 |
|
5.4. Расчет и построение тяговой и токовой характеристик с учетом ограничений
для обеспечения устойчивости локомотивов против боксования устанавливают так называемый расчетный коэффициент сцепления ψк , величина которого меньше потенциального ψо . При этом сила тяги по сцеплению составляет
Fксц = ψк . Pсц , кН. (5.17)
Расчетный (нормативный) коэффициент сцепления локомотива ψк определяют экспериментальным путем и задают так, чтобы обеспечить практически приемлемую надежность движения полновесных поездов (поездов расчетной массы) по тяжелым подъемам при плохих условиях сцепления.
В данной курсовой работе характеристики сцепления ψк =f(V) можно считать следующими:
для электровозов постоянного тока
ψк =0,28+3/(50+20. V)-0,0007. V; (5.18)
- для магистральных тепловозов
ψк =0,118+5/(V+27,5). (5.19)
Для построения тяговых характеристик локомотивов предварительно необходимо рассчитать силу тяги по сцеплению Fксц при различной скорости движения локомотива. Полученные значения внести в таблицу 5.6.
Таблица 5.6.
Сила тяги локомотива по сцеплению
| V, км/ч |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
| ψк |
0,3 |
0,251 |
0,223 |
0,204 |
0,192 |
0,183 |
0,175 |
0,168 |
0,165 |
| Fксц , кН |
406,4 |
339,8 |
301,9 |
276,1 |
260 |
247,1 |
237,1 |
228,8 |
223,4 |
5.6 Построение тяговых и токовых характеристик локомотивов
Тяговой характеристикой локомотива называют графическую зависимость касательной силы тяги Fк от скорости движения V при установившихся режимах на разных позициях регулирования (позициях контроллера машиниста).
Токовая характеристика представляет графическую зависимость тока электровоза Iэ или тока тягового генератора (ТГ) тепловоза Iг от скорости V при установившихся режимах на разных позициях контроллера машиниста.
На стадии проектирования локомотивов указанные зависимости Fк =f(V) и I=f(V) можно построить по электротяговым характеристикам. Для этого необходимо пересчитать данные таблицы 5.5, а именно:
а) определить значения тока локомотива по величинам тока ТЭД:
- ток тягового генератора тепловоза Iг - по формуле (5.9);
б) определить значения касательной силы тяги локомотива Fк по величинам силы тяги ТЭД Fкд
Полученные результаты занести в таблицу 5.7.
Таблица 5.7.
Табл 5.7 Рабочие характеристики локомотива
| Iг , A |
2778 |
3000 |
3500 |
4000 |
4500 |
5000 |
5777 |
|
| ПП |
Fк , кН |
111 |
121,8 |
148,2 |
176,4 |
204 |
232,8 |
279,6 |
| V, км/ч |
48,5 |
44,2 |
36,2 |
30,4 |
26,3 |
23 |
19,2 |
|
| ОП1 |
Fк , кН |
79,2 |
90,6 |
114 |
138 |
166,2 |
193,2 |
234 |
| V, км/ч |
68,1 |
59,3 |
47 |
39 |
32,4 |
27,8 |
23 |
|
| ОП2 |
Fк , кН |
55,4 |
63,6 |
78 |
96,6 |
117 |
139,2 |
174,6 |
| V, км/ч |
97 |
84,6 |
68,6 |
57,6 |
46,4 |
38,6 |
30,8 |
|
Порядок построения рабочих характеристик тепловоза заключается в следующем :
1) В координатах V,Iг построить линии ограничений максимального Iгmax и минимального Iгmin тока ТГ.
2) Рассчитать значения силы тока ТГ, соответствующие автоматическим переходам ТЭД с одного режима возбуждения на другой :
- ток переходов ПП![]() ОП1
IГП-1
ОП1
IГП-1![]() (Iгmin
+Iгн
+160)/2, A; (5.23)
(Iгmin
+Iгн
+160)/2, A; (5.23)
- ток переходов ОП1![]() ОП2
IГ1-2
ОП2
IГ1-2![]() (Iгmin
+Iгн
-20)/2, A. (5.24)
(Iгmin
+Iгн
-20)/2, A. (5.24)
Используя значения IГП-1
и IГ1-2
, построить горизонтальные линии переходов ПП![]() ОП1
и ОП1
ОП1
и ОП1![]() ОП2
.
ОП2
.
3) По данным таблицы 5.7 построить график Iг
=f(V) (рис.6) и определить скорости тепловоза Vп-1
и V1-2
, соответствующие переходам ПП![]() ОП1
и ОП1
ОП1
и ОП1![]() ОП2
.
ОП2
.
4) Используя данные таблицы 5.7 и токовую характеристику Iг =f(V),
построить тяговую характеристику тепловоза Fk =f(V); показать ограничения силы тяги по максимальному току ТГ Fk доп и по сцеплению (таблица 5.6), а также ограничение конструкционной скорости тепловоза Vк .
5) По графику Iг =f(V) определить скорость продолжительного режима тепловоза Vдл , соответствующую номинальной силе тока ТГ Iгн , а по значению Vдл - длительную силу тяги тепловоза.
Полученные значения основных технических параметров локомотива следует внести в таблицу 5.8.
Основные технические параметры локомотива (тепловоз)
| Режим работы |
Параметры |
Ограничения |
|
| сила тяги, кН |
скорость, км/ч |
||
| 1) Продолжительный |
Fкдл =200 |
Vдл =26 |
------ |
| 2) Расчетный |
Fкр =309 |
Vр =17 |
По сцеп. |
| 3) Трогание с места |
Fктр =406 |
------- |
По току |
Расчетным режимом работы локомотива называют режим, характеризуемый величинами расчетной силы тяги Fкр и расчетной скорости Vр . По этим параметрам определяют так называемые расчетные нормы массы составов на участках железных дорог.
Расчетный режим тепловозов принято устанавливать по параметрам продолжительного режима работы тяговых электромашин. Если в результате проектирования тепловоза оказалось, что величина Fкдл превышает силу тяги по сцеплению Fксц при скорости Vдл , то значение расчетной силы тяги Fкр и расчетной скорости Vр принимают по точке "порога" тяговой характеристики.
Помимо расчетной силы тяги, другим важным параметром локомотива является сила тяги при трогании с места Fктр . Ее величина может быть ограничена по сцеплению либо по максимальному току локомотива. Первый случай характерен для грузовых и маневровых локомотивах, а второй – для пассажирских.
Значения параметров расчетного режима и трогания, как одни из важнейших характеристик локомотивов, нормируются ПТР .
6. Электроподвижной состав.
6.1 Электровоз постоянного тока ВЛ10
Электровоз ВЛ10 предназначен для работы с грузовыми поездами на магистральных железных дорогах РФ, электрифицированных на постоянном токе с напряжением в контактной сети 3000 В.
Все оборудование электровозов рассчитано на надежную работу при напряжении в контактной сети от 2200 до 4000 В. Изменение температуры окружающего воздуха вне кузова допускается от —50 до +40 °С при влажности воздуха 90%, замеренной при температуре +27 °С. Высота над уровнем моря не более 1200 м. Электровоз ВЛ 10 и состоит из двух сочлененных между собой автосцепкой СА-3 секций. На электровозах ВЛ10 выпуска до 1975 г. каждая секция опиралась на две двухосные несочлененные тележки через упругие опоры. На электровозах ВЛ10 выпуска с 1975 г. секции кузова на тележках опираются с помощью люлечного подвешивания, которое в значительной, степени улучшает горизонтальную динамику электровоза.
Сварные рамы тележек обладают повышенной надежностью, в процессе изготовления их подвергают тщательному контролю с применением современной аппаратуры. Тележки оборудованы бесчелюстными буксами с роликовыми подшипниками повышенной долговечности, Перемещение букс относительно рамы происходит за счет деформации сдвига резинометаллических блоков. Рессорное подвешивание обеспечивает эффективное смягчение вертикальных толчков при прохождении электровозом неровностей пути.
На электровозах ВЛ10 установлено по восемь тяговых двигателей. Тяговые электродвигатели имеют последовательное возбуждение, опорно-осевое подвешивание, принудительную вентиляцию и мощность при часовом режиме по 670 кВт. Электродвигатели обладают надежностью и высоким к. п. д. Вращающий момент от тягового двигателя на колесные пары передается двусторонней одноступенчатой цилиндрической косозубой передачей.
Для регулирования частоты вращения тяговых двигателей предусмотрены три вида их соединения: последовательное (С), последовательно-параллельное (СП) и параллельное (П). Кроме того, на всех этих соединениях предусмотрена работа тяговых электродвигателей при ослабленном возбуждении с коэффициентом возбуждения 0,75; 0,55; 0,43; 0,36. Электрические цепи электровоза получают питание от контактного провода через токоприемники, обеспечивающие надежный токосъем при любых скоростях движения электровоза.
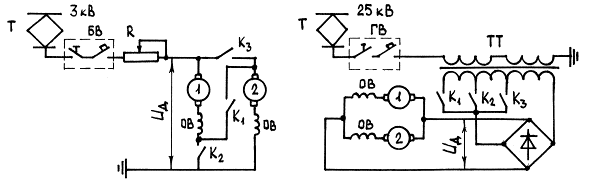
Схемы силовых цепей электровозов
а) электровоз постоянного тока б) электровоз переменного тока
6.2 Электровоз переменного тока ВЛ80
Электровоз ВЛ80 предназначен для эксплуатации на магистральных железных дорогах РФ, электрифицированных на однофазном токе промышленной (50 Гц) частоты с номинальным напряжением 25 к В.
Оборудование электровоза рассчитано на работу при напряжении в контактной сети от 19 до 29 кВ, изменении температуры окружающего воздуха от — 50 до + 40 °С, влажности воздуха до 90 % при температуре 293 К (+ 20 °С) и высоте над уровнем моря не более 1200 м. Электровоз состоит из двух однотипных секций, оборудован электрическим реостатным тормозом и системой, позволяющей управлять двумя электровозами по системе многих единиц.
В состав поставки электровоза входят: комплекты инструментов, принадлежностей и запасных частей, предназначенных для использования при техническом обслуживании н текущих ремонтах;
комплект технической документации, предназначенной для использования при эксплуатации, техническом обслуживании и текущих ремонтах.
6.3 Электропоезд ЭР2
Электропоезд ЭР2 предназначен для перевозки пассажиров на пригородных участках железных дорог, электрифицированных на постоянном токе с номинальным напряжением в контактной сети 3 300 в.
За основную поездную единицу принят 10-вагонный электропоезд, состоящий из двух головных, пяти моторных и трех промежуточных прицепных вагонов. По условиям эксплуатации допускается формирование поезда из восьми, шести или четырех вагонов , а также из двенадцати.
Управление поездом осуществляется из кабины машиниста, имеющейся в каждом головном вагоне. На электропоезде ЭР2 предусмотрен реостатный пуск тяговых двигателей с переключением их в процессе пуска с последовательного на параллельное соединение, двухступенчатое ослабление поля на каждом из двух соединений шунтированием обмоток возбуждения активным и индуктивным сопротивлениями и реверсирование хода поезда, а также защита тяговых двигателей от перегрузок, коротких замыканий, боксования и перенапряжений.
Система управления двигателями—групповая, косвенная. Основным аппаратом управления является силовой контроллер с пневматическим приводом, имеющий одностороннее вращение. Этот контроллер имеет 18 позиций.
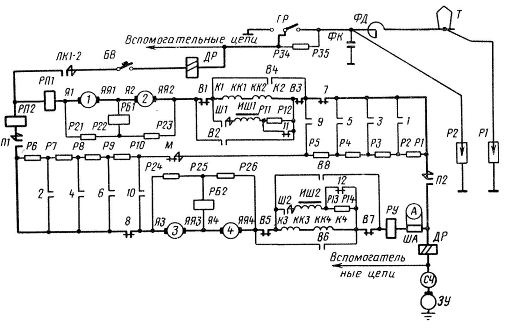
Схема силовых цепей моторного вагона
7. Вывод
В ходе выполнения курсовой работы я изучил физические процессы, происходящие в колесно-моторном блоке (КМБ) тепловоза при преобразовании электрической энергии в механическую, и создании силы тяги. На основании рассчитанных параметров тягового электродвигателя (ТЭД) построил тяговую характеристику тепловоза с нанесением на ней ограничений по конструктивным параметрам и условиям сцепления колеса с рельсом.
8. СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Зорохович А.Е., Крылов С.С. Основы электротехники для локомотивных бригад: Учебник для техн.школ. - М.:Транспорт,1987.-414 с.
2. Дробинский В.А., Егунов П.М. Как устроен и работает тепловоз. - М.:Транспорт,1980. - 367 с.
3. Сидоров Н.И. Как устроен и работает электровоз. - М.: Транспорт,1980. - 223 с.
4. Луков Н.М., Стрекопытов В.В., Рудая К.И. Передачи мощности тепловозов: Учебник для вузов ж.-д. трансп. / Под ред. Н.М.Лукова - М.:Транспорт,1987. - 279 с.
5. Тепловозы: Основы теории и конструкция: Учеб. для техникумов / В.Д.Кузьмич, И.П.Бородулин, Э.А.Пахомов и др.; Под ред. В.Д.Кузьмича.- М.:Транспорт,1991.-352 с.
6. Электрические железные дороги: Учебник для вузов ж.-д. трансп. / В.А.Кисляков, А.В.Плакс, В.Н.Пупынин и др.; Под ред. А.В.Плакса и В.Н.Пупынина. - М.:Транспорт,1993. - 280 с.
7. Бирюков И.В., Беляев А.И., Рыбников Е.К. Тяговые передачи электроподвижного состава железных дорог.-М.:Транспорт,1986. - 256 с.
8. Бородин А.П. Электрическое оборудование тепловозов: Учебник для средних ПТУ. - М.:Транспорт,1988. - 287 с.
9. Вилькевич Б.И. Автоматическое управление электрической передачей и электрические схемы тепловозов. - М.:Транспорт,1987. - 272 с.
10. Теория электрической тяги / В.Е.Розенфельд, И.П.Исаев, Н.Н.Сидоров, М.И.Озеров; Под ред. И.П.Исаева. - М.: Транспорт,1995.-294 с.
11. Подвижной состав и тяга поездов: Учебник / Третьяков А.П., Деев В.В., Перова А.А. и др.; Под ред. В.В.Деева, Н.А.Фуфрянского. - М.:Транспорт,1979. - 368 с.
12. Режимы работы магистральных электровозов / О.А.Некрасов, А.Л.Лисицын, Л.А.Мугинштейн, В.И.Рахманинов; Под ред. О.А.Некрасова. - М.:Транспорт,1983. - 231 с.
13. Правила тяговых расчетов для поездной работы. - M.:Транспорт, 1985. - 287 с.