| Скачать .zip |
Реферат: Кран козловой двухконсольный
Обозначение | Наименование | Кол. | Приме-чание | |||||||||||||||
| Документация | ||||||||||||||||||
| А1 | СДМ1-12.00.000 СБ | Сборочный чертеж | ||||||||||||||||
| Сборочные единицы | ||||||||||||||||||
| 1 | СДМ1-12.00.100 | Рама | 1 | |||||||||||||||
| 2 | СДМ1-12.00.200 | Редуктор Ц2-500 | 1 | |||||||||||||||
| 3 | СДМ1-12.00.300 | Барабан | 1 | |||||||||||||||
| Детали | ||||||||||||||||||
| 6 | СДМ1-12.00.001 | Вал | 1 | |||||||||||||||
| Стандартные изделия | ||||||||||||||||||
| Болт ГОСТ 7808- 76 | ||||||||||||||||||
| 5 | М20-6gх130 | 4 | ||||||||||||||||
| 6 | М20-6gх70 | 6 | ||||||||||||||||
| 7 | М12-6gх60 | 2 | ||||||||||||||||
| Гайка ГОСТ 5285-70 | ||||||||||||||||||
| 8 | М20-6Н.5 | 10 | ||||||||||||||||
СДМ1 –12.00.000 | ||||||||||||||||||
| Изм | Лист | № докум. | Подпись | Дата | ||||||||||||||
| Разраб. | Кузьмич | Механизм передвижения | Лит. | Лист | Листов | |||||||||||||
| Проверил | Передня | 1 | 2 | |||||||||||||||
БНТУ гр.114115 | ||||||||||||||||||
| Н. контр. | ||||||||||||||||||
| Утвердил | ||||||||||||||||||
|
|
| Обозначение | Наименование | Кол. | Приме-чание | ||||||||
| 9 | М12-6Н.5 | 2 | ||||||||||||
| 10 | Муфта 31,5x50-1 У3 | 1 | ||||||||||||
| ГОСТ 21424-93 | ||||||||||||||
| 11 | Муфта 31,5x50-1 У2 | 1 | ||||||||||||
| ГОСТ 21424-93 | ||||||||||||||
| 12 | Шайба 20 Т ГОСТ 6402-70 | 10 | ||||||||||||
| 13 | Шайба 12 Т ГОСТ 6402-70 | 2 | ||||||||||||
| 14 | Шайба 20 ГОСТ 6402-70 | 10 | ||||||||||||
| 15 | Шайба 12 ГОСТ 10906-78 | 2 | ||||||||||||
| Прочие изделия | ||||||||||||||
| 16 | Двигатель MTF-111-6 | 1 | ||||||||||||
| 17 | Тормоз ТКГ-300 | 1 | ||||||||||||
СДМ1 –12.00.000 | Лист | |||||||||||||
| 2 | ||||||||||||||
| Изм. | Лист | № докум. | Подпись | Дата | ||||||||||
|
| | Обозначение | Наименование | Кол. | Приме-чание | ||||||||||||
| Документация | ||||||||||||||||||
| А1 | СДМ1-12.00.000 СБ | Сборочный чертеж | ||||||||||||||||
| Сборочные единицы | ||||||||||||||||||
| 1 | СДМ1-12.00.100 | Рама | 1 | |||||||||||||||
| 2 | СДМ1-12.00.200 | Редуктор Ц2-500 | 1 | |||||||||||||||
| 3 | СДМ1-12.00.300 | Барабан | 1 | |||||||||||||||
| Детали | ||||||||||||||||||
| 6 | СДМ1-12.00.001 | Вал | 1 | |||||||||||||||
| Стандартные изделия | ||||||||||||||||||
| Болт ГОСТ 7808- 76 | ||||||||||||||||||
| 5 | М30-6gх220 | 4 | ||||||||||||||||
| 6 | М30-6gх175 | 6 | ||||||||||||||||
| 7 | М14-6gх65 | 2 | ||||||||||||||||
| Гайка ГОСТ 5285-70 | ||||||||||||||||||
| 8 | М30-6Н.5 | 10 | ||||||||||||||||
СДМ1 –12.00.000 | ||||||||||||||||||
| Изм | Лист | № докум. | Подпись | Дата | ||||||||||||||
| Разраб. | Кузьмич | Механизм подъема | Лит. | Лист | Листов | |||||||||||||
| Проверил | Передня | 1 | 2 | |||||||||||||||
БНТУ гр.114115 | ||||||||||||||||||
| Н. контр. | ||||||||||||||||||
| Утвердил | ||||||||||||||||||
|
|
| Обозначение | Наименование | Кол. | Приме-чание | ||||||||
| 9 | М14-6Н.5 | 2 | ||||||||||||
| 10 | Муфта 31,5x50-1 У3 | 1 | ||||||||||||
| ГОСТ 21424-93 | ||||||||||||||
| 11 | Муфта 31,5x50-1 У2 | 1 | ||||||||||||
| ГОСТ 21424-93 | ||||||||||||||
| 12 | Шайба 30 Т ГОСТ 6402-70 | 10 | ||||||||||||
| 13 | Шайба 14 Т ГОСТ 6402-70 | 2 | ||||||||||||
| 14 | Шайба 30 ГОСТ 6402-70 | 10 | ||||||||||||
| 15 | Шайба 14 ГОСТ 10906-78 | 2 | ||||||||||||
| Прочие изделия | ||||||||||||||
| 16 | Двигатель MTF-312-6 | 1 | ||||||||||||
| 17 | Тормоз ТКГ-300 | 1 | ||||||||||||
СДМ1 –12.00.000 | Лист | |||||||||||||
| 2 | ||||||||||||||
| Изм. | Лист | № докум. | Подпись | Дата | ||||||||||
|
| | Обозначение | Наименование | Кол. | Приме-чание | ||||||||||||
| Документация | ||||||||||||||||||
| А1 | СДМ1-12.00.000 СБ | Сборочный чертеж | ||||||||||||||||
| Детали | ||||||||||||||||||
| 1 | СДМ1-12.00.001 | Фланец | 2 | |||||||||||||||
| 2 | СДМ1-12.00.002 | Лист | 16 | |||||||||||||||
| Стандартные изделия | ||||||||||||||||||
| 3 | Швеллер 400x95x8 | 2 | ||||||||||||||||
| ГОСТ 8278-83 | ||||||||||||||||||
СДМ1 –12.00.000 | ||||||||||||||||||
| Изм | Лист | № докум. | Подпись | Дата | ||||||||||||||
| Разраб. | Кузьмич | Стяжка | Лит. | Лист | Листов | |||||||||||||
| Проверил | Передня | 1 | 1 | |||||||||||||||
БНТУ гр.114115 | ||||||||||||||||||
| Н. контр. | ||||||||||||||||||
| Утвердил | ||||||||||||||||||
|
|
|
| Обозначение | Наименование | Кол | Примечание | ||||||||||||
| Документация | ||||||||||||||||||
| А1 | СДМ1-12.00.00.000 ВО | Чертеж общего вида | ||||||||||||||||
| Сборочные единицы | ||||||||||||||||||
| 1 | СДМ1-12.01.00.000 | Мост | 1 | |||||||||||||||
| 2 | СДМ1-12.02.00.000 | Тележка | 1 | |||||||||||||||
| 3 | СДМ1-12.03.00.000 | Подвеска крюковая | 1 | |||||||||||||||
| 4 | СДМ1-12.04.00.000 | Блок | 4 | |||||||||||||||
| 5 | СДМ1-12.05.00.000 | Опора жесткая | 2 | |||||||||||||||
| 6 | СДМ1-12.06.00.000 | Опора гибкая | 2 | |||||||||||||||
| 7 | СДМ1-12.07.00.000 | Площадка смотровая | 2 | |||||||||||||||
| 8 | СДМ1-12.08.00.000 | Кабина закрытая | 1 | |||||||||||||||
| 9 | СДМ1-12.09.00.000 | Площадка ремонтная | 1 | |||||||||||||||
| 10 | СДМ1-12.10.00.000 | Стяжка | 2 | |||||||||||||||
| 11 | СДМ1-12.11.00.000 | Монорельс | 1 | |||||||||||||||
| 12 | СДМ1-12.12.00.000 | Колесо ходовое | 4 | |||||||||||||||
| СДМ1-12.00.00.000 | ||||||||||||||||||
| Подпись | Дата | |||||||||||||||||
| Изм | Лист | № докум. | ||||||||||||||||
| Разработ | Кузьмич | Кран козловой | Лит. | Лист | Листов | |||||||||||||
| Проверил | Передня | 1 | 1 | |||||||||||||||
| БНТУ гр.114115 | ||||||||||||||||||
| Н. контр. | ||||||||||||||||||
| Утвердил | ||||||||||||||||||
Содержание
Введение……………………………………………………………………….4
Описание устройства и работы козлового
двухконсольного крана………………………………………………….….5
2. Расчет механизма подъема………………………………………………….12
3. Расчет механизма передвижения грузовой тележки……………………….20
4. Расчет металлоконструкции стяжки крана…………………………………27
5. Охрана труда при эксплуатации однобалочных мостовых крана…….......30
Заключение……………………………………………………………………32
Список используемых источников………………………………………….33
Приложение А: Спецификация………………................................34
Введение
Подъемно-транспортные машины находят широкое применение во многих отраслях промышленности, сельского хозяйства, всех видов транспорта, в которых используют как общепромышленные виды этих машин так и их системы и конструкции, отражающие специфику данной области народного хозяйства.
Механизация и автоматизация производственных процессов требуют всемирного расширения областей эффективного применения различных грузоподъемных и транспортирующих машин и механизмов. Широкое использование способствует механизации трудоемких и тяжелых работ, удешевлению стоимости производства, улучшению использования объема производственных зданий, сокращению путей движения грузов в технологической цепи производства.
Высокая технологичность машин для лесозаготовок и лесосплава обеспечивается тем, что цепь производства связана современной системой подъемных и транспортирующих машин и механизмов, подъемно-транспортных машин.
1 Описание устройства и работы козлового двухконсольного крана
Козловые краны относятся к категории подъемных устройств мостового типа. Несущие элементы их конструкции опираются на подкрановый путь с помощью двух опорных стоек. Средний срок службы козловых кранов примерно 20 лет без учета режима работы и условий эксплуатации. Наработка на отказ – примерно 3 000 циклов.
В статье мы расскажем о козловых кранах с полным электрическим приводом. По назначению их можно разделить на три группы. Первая группа – краны общего назначения со сравнительно небольшой высотой подъема (в среднем до 12 м). Применяют их для обслуживания открытых складских и перегрузочных площадок. Вторая группа – строительно-монтажные козловые краны для монтажа сборных строительных сооружений и оборудования промышленных предприятий. В третью группу входят конструкции специального назначения (обычно ККС) для обслуживания гидротехнических сооружений, перегрузки крупнотоннажных контейнеров и длинномерных грузов.
В козловых кранах используются самые разные грузозахватные органы: однорогие и двурогие крюки, грейферы (ковшовые захваты для навалочных грузов), грузоподъемные электромагниты серий М и ПМ, специальные грузозахватные приспособления – клещевые захваты, траверсы, грузовые рамы, спредеры.
В зависимости от конструкции моста козловые краны подразделяются на однобалочные и двухбалочные. Механизм подъема установлен на грузовой тележке, которая перемещается по мосту. В зависимости от назначения кран оборудован одним или двумя механизмами подъема (основным и вспомогательным). Мощность привода и грузоподъемность вспомогательного механизма подъема, как правило, меньше мощности основного (главного) . Скорость таких механизмов подъема также различная – у вспомогательного обычно меньше. Есть, однако, конструкции козловых кранов, в которых оба привода имеют одинаковые характеристики и работают синхронно. Тележки кранов такой конструкции выполняют подвесными монорельсовыми (грузоподъемность до 5 т, реже – до 10 т), подвесными двухрельсовыми, консольными и консольно-подвесными. Если мост крана однобалочный, в качестве крановой тележки применяют электрические тали, и в таком случае ее путь – это монорельсовая направляющая (двутавровая балка).
Сечение моста козлового крана может быть трубчатым, коробчатым или решетчатым. Краны с двухбалочным мостом более металлоемкие, но у них есть свои преимущества, главное из которых – возможность установить тележки от мостовых кранов типовых конструкций, выполненных по отработанной технологии. Грузовые тележки кранов с двухбалочным мостом иногда снабжают поворотной стрелой.
Обычно козловые краны изготовляют двухконсольными. Консоль – это
часть моста, выходящая за пределы подкранового пути (опоры). Наличие консолей расширяет рабочую зону кранов, например дает возможность обслуживать с одного места несколько подъездных железнодорожных, автомобильных путей и складских площадок.
Опоры козловых кранов выполняют двухстоечными равной жесткости или одну опору жесткой, другую – «гибкой». В таких конструкциях шарнирное крепление устанавливается в узле остова крана. Это техническое решение позволяет компенсировать нагрузки перекоса в надопорных узлах остова крана. Изготовляют краны и с одностоечными опорами. Конструкции с однобалочными мостами и одностоечными опорами используют при совместной работе двух кранов.
Управление козловым краном осуществляется с пола или из кабины, которая крепится к раме тележки или к мосту крана у опоры. Скорость его обычно не превышает 1 м/с. Грузоподъемность козловых кранов общего назначения 3,2...32 т, длина пролетов 10...32 м, высота подъема груза 7...10 м (реже – до 12 м). Грузоподъемность строительно-монтажных кранов больше – до 400 т, длина пролетов – до 80 м, высота подъема – до 30 м.
Параметры козловых кранов специального назначения лучше – грузоподъемность до 900 т, длина пролетов более 130 м, высота подъема до 80 м. Например, для обслуживания гидроэлектростанций используются краны грузоподъемностью 20...500 т с пролетом длиной 5...20 м. Такие подъемные механизмы иногда оснащают дополнительными грузоподъемными средствами – монтажной стрелой, консольно-поворотным краном и т. п.
Контейнерные краны используются в основном для обслуживания крупных перегрузочных пунктов – морских портов, контейнерных терминалов, железнодорожных станций. Для работы в морском порту их оснащают подъемной консолью. Грузозахватным органом контейнерных кранов являются специальные грузовые рамы (спредеры) с автоматическими зацепами под фитинги и рым-узлы контейнеров. Особенность такой комплектации – то, что кран оборудован специальной грузовой тележкой. Параметры козловых контейнерных кранов грузоподъемностью 20 и 32 т регламентирует ГОСТ 24390–99. Высота подъема этих кранов назначается в зависимости от условий штабелирования контейнеров, т. е. ярусности складирования. Этот класс крановой техники заслуживает отдельной публикации.
Грейферные и магнитные краны распространены меньше, чем краны общего назначения, так как задачи по перегрузке навалочных грузов и грузов, перемещаемых электрическими магнитами, решаются в основном за счет применения съемных приводных грейферов и магнитов с независимым питанием и управлением. Однако необходимо помнить, что краны этих типов должны быть оснащены специальными грузовыми тележками – грейферными или магнитными, а захватные органы (грейфер или магнит) производитель должен поставлять как часть крана. Магнитный кран обязательно оснащают кабелеукладчиком и кабельным барабаном, емкость которого соответствует высоте подъема магнита.
Управляемые с пола козловые краны грузоподъемностью до 10 т со скоростью передвижения до 1 м/с не подлежат регистрации в органах
госгортехнадзора, краны большей грузоподъемности допускаются к эксплуатации только после регистрации. Вместе с документами на регистрацию должна представляться справка о соответствии наземного пути нагрузкам устанавливаемого крана. Для выработавшего ресурс крана в составе документов на регистрацию должно быть представлено заключение специализированной организации о возможности его дальнейшей эксплуатации. Разрешение на пуск в работу козлового крана (после установки на новом месте, после реконструкции, ремонта или замены расчетных узлов металлоконструкций с применением сварки) должно быть получено в органе Госгортехнадзора, зарегистрировавшем машину.
Козловые краны обязательно оснащают ограничителями рабочих движений для автоматического останова механизма подъема, механизма передвижения крана независимо от скорости передвижения и механизма передвижения грузовой тележки. В комплект также должны входить автоматические ограничители перекоса, противоугонные устройства (рельсовые захваты и т. п.), упругие буферные устройства. Краны группы режима не менее А6 и грузоподъемностью более 10 т по ИСО 4301/1 оборудуют регистраторами работы – так называемыми «черными ящиками».
Введена марочная система, определяющая порядок допуска на кран специалистов, чтобы свести к минимуму несчастные случаи при работе козлового крана в результате несогласованных действий машиниста и стропальщиков, а также работников, занятых на ремонте или обслуживании. Вводное устройство (защитная панель) крана оборудуется индивидуальным контактным замком с ключом. Ключ-марка предназначен для замыкания цепи управления и относится к приборам безопасности, на нем выбит регистрационный номер крана.
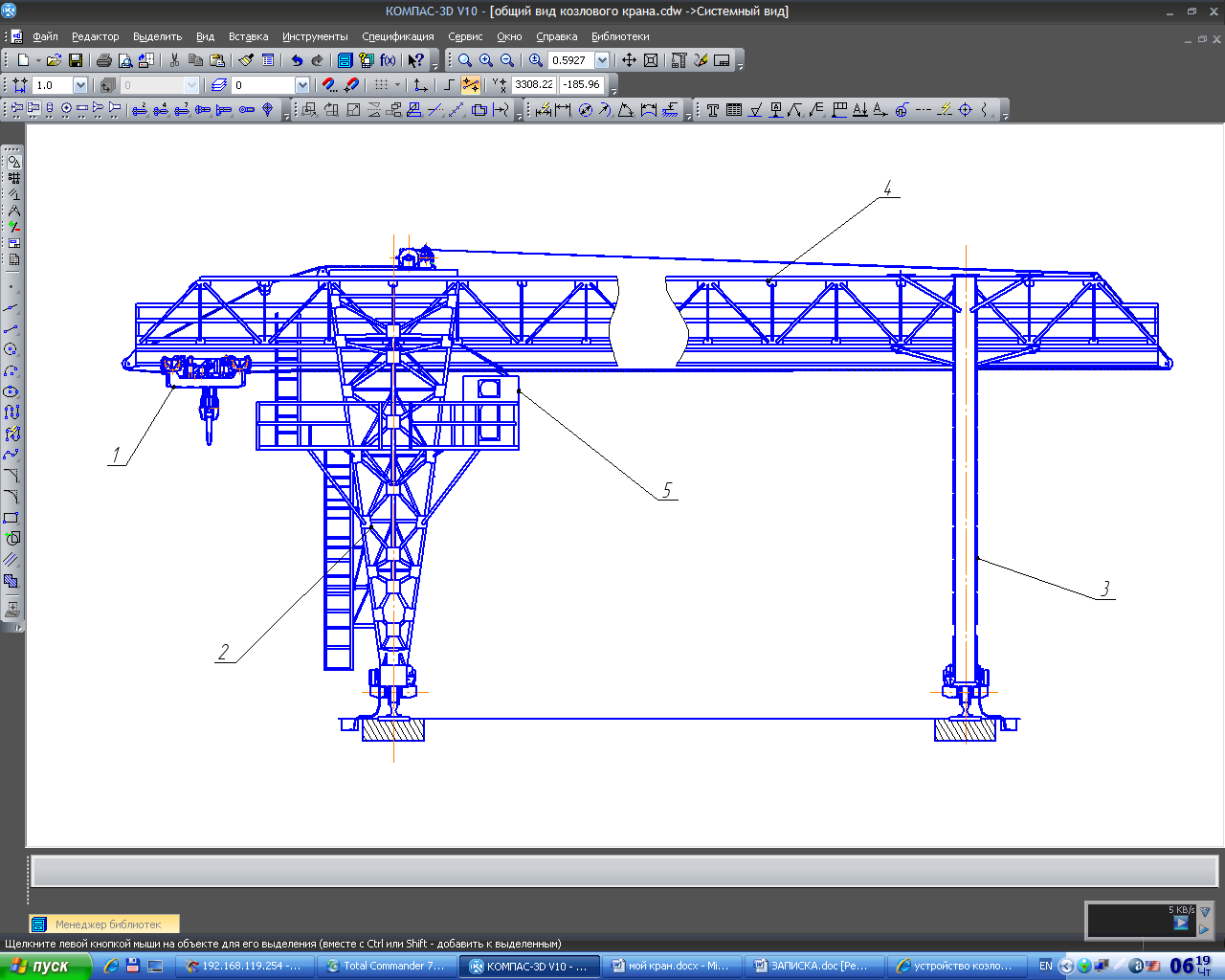
Рисунок 1- устройство козлового крана
1 – грузовая тележка; 2 – опора жесткая; 3 – опора гибкая; 4 – пролёт; 5 – кабина.
Основные узлы
Механизм подъема груза состоит из канатной лебедки, полиспаста и грузозахватного органа (крюка, захватной траверсы, грейфера и т. п.). Лебедка содержит приводной электродвигатель, через соединительную муфту связанный с входным валом цилиндрического зубчатого редуктора. Последний вращает барабан, на который навивается одна или две ветви каната подъемного полиспаста. Тормозной шкив установлен на входном валу редуктора. В механизмах подъема груза использованы одинарные или сдвоенные канатные полиспасты .
Длину канатов и размеры канатных барабанов выбирают таким образом, чтобы при возможно низшем положении грузозахватного органа (крюка, грейфера и т. п.) на барабане оставалось не менее 1,5 витка каждого из концов канатов (без учета участка каната, используемого для крепления на барабане). Если лебедку монтируют на мосту крана, в состав механизма подъема входит система отводных блоков грузового каната [3].
Механизмы передвижения изготовляют двух видов: с приводом на ходовые колеса тележки и канатный. Механизм первого вида содержит приводной электродвигатель, вращающий через промежу-точньн'Квалик с муфтами вертикальный ицлиндрический редуктор. Выходной вал последнего зубчатой соединительной муфтой связан с валом ведущих ходовых колес грузовой тележки. Тормозной шкив смонтирован на валу редуктора или на одном из концов вала двигателя.
Лебедка канатного механизма передвижения по схеме аналогична подъемной лебедке, на барабан которой в противоположных направлениях запасованы тяговые канаты, прикрепленные другими своими концами к грузовой тележке. Для выборки слабины и создания необходимого предварительного натяжения каната у одного из его концов предусмотрено натяжное устройство винтовое, в виде ручной червячной лебедки и т. п.
Обычно механизмы передвижения кранов выполняют в виде одно- или двухколесной ходовой тележки. Приводные тележки снабжены двигателями, через редукторы вращающими ходовые колеса.
Последние смонтированы на вращающихся валах или на неподвижных осях. В этом случае они имеют зубчатые венцы.
На кранах для подъема груза или для вспомогательных целей применяют электрические тали, которые представляют собой компактный грузоподъемный механизм. Механизм подвешен к двух- или четырехколесным тележкам, перемещающимся по подвесным моно-рельсовым путям.
На козловых кранах используют преимущественно двухколодочные тормоза с пружинным замыканием, управляемые с помощью клапанных электромагнитов МО-Б переменного тока или электрогидротолкателей.
Основные параметры
К основным параметрам козловых кранов помимо грузоподъемности относятся: пролет, рабочий вылет консоли, высота подъема захватного органа над уровнем головок подкрановых рельсов, а также скорости рабочих движений. Существенное, значение имеют также размеры, определяющие условия транспортирования груза от консоли к пролетной части: у кранов с двухстоечными опорами это расстояние в свету между стойками опоры, в значительной мере зависящее от опорной базы, а у кранов с одностоечными опорами — расстояние от грузовой подвески до передней грани опорной стойки. Для устойчивого передвижения кранов по крановым путям должно быть обеспечено определенное (обычно1: 5... 1:7) отношение пролета к колесной базе. Ширина ходовых тележек и нижних частей крана определяет возможные пределы приближения к подкрановым путям штабелей груза, транспортных средств, сооружений и наземного оборудования. Имеет значение также и уровень расположения выступающих элементов ходовой части. Вертикальные нагрузки на ходовые колеса крана, в значительной мере определяющие расходы на сооружение и эксплуатацию подкрановых путей, также должны быть включены в число основных параметров козловых кранов.
Типовая схема установки козлового крана на объекте наиболее распространенного вида — складе, обслуживаемом железнодорожным и автомобильным транспортом. Пролет L определяется, как правило, планировочными условиями объекта; необходимой вместимостью склада, размерами пропарочных камер для изготовления железобетонных изделий и т. п.
Вылет консолей Lк целесообразно принимать исходя из условия равенства моментов от подвижной нагрузки в пролете и у опор. Однако вылет должен обеспечить складирование груза и беспрепятственное безопасное обслуживание транспортных средств.
Во всех случаях, в соответствии, с требованиями Правил Госгортехнадзора [4], расстояние между выступающими частями крана и наземными предметами или транспортными средствами на высоте 2,0 м от уровня земли должно быть не менее 700 мм, а на высоте более 2м — не менее 400 мм. Вместе с тем эти части не должны выступать за линию предельного габарита, установленного ГОСТ 9238—73. Вылет консоли должен быть достаточным для перекрытия всей ширины вагона или платформы безрельсового транспортного средства (2, 5.., 3, 3 м). При перегрузке крупноразмерных грузов, например железнодорожных контейнеров массой 5 и 20 т, часто бывает достаточным, если вылет будет на 150... 250 мм превышать расстояние от опор подкранового рельса до центра вагона.
Обычно для обслуживания железнодорожных вагонов достаточно иметь вылет 4, 2... 4, 5 м; при работе с крупнотоннажными контейнерами минимально допустимый вылет 3, 4... 3, 6 м. Вылет консоли должен составлять. 0,20... 0,30 пролета. Рекомендуется избегать увеличивать вылет консоли, так как при этом резко возрастают их прогибы, что может потребовать дополнительного усиления моста. Помимо этого при выходе груза на такую консоль бывает трудно обеспечить необходимый запас сцепления у ходовых колес противоположной опоры [3].
Высота подъема определяется из условия, что зазор между транспортируемым, грузом и наземными предметами должен быть не менее 0, 5 м. При работе с железнодорожным транспортом высота подъема должна составлять не менее 8 м; у кранов, используемых для: перегрузки контейнеров, ее следует увеличивать до 9 м. В большинстве случаев высота подъема 9... 10 м бывает достаточной как для обслуживания транспортных средств, так и для штабелирования грузов. Иногда, например, для кранов лесных складов ее принимают по наибольшей допустимой высоте складирования 16 м.
Расстояние в свету между стойками опор должно обеспечивать возможность перемещения без разворота наиболее часто транспортируемых грузов и разворотом — грузов всех видов, для работы с которыми предназначен кран.
Следует иметь в виду, что разворот груза на весу, даже при наличии приводного поворотного устройства, увеличивает длительность перегрузочного цикла. Для ручного разворота длинномерных грузов массой более 5 т необходимо не менее двух человек. Чтобы избежать разворота грузов над железнодорожными платформами и в особенности полувагонами, расстояние между стойками должно быть достаточным для перемещения на необходимой высоте поперечно расположенного груза. Груз, подвешенный на свободно вращающемся крюке, при проходе через опору может самопроизвольно развернуться. Поэтому для интенсивно эксплуатируемых кранов расстояние между стойками необходимо назначать исходя из наибольшего размера груза (например, диагонали пакета или контейнера). Зазор между грузом и стойками опор должен быть не менее 500 мм. Это же относится и к тем случаям, когда приходится разворачивать груз в пролете или под консолями.
Практика показывает, что для кранов грузоподъемностью 3,2... 5 т универсального назначения при колесной базе В = 6,5...7,5 м удается обеспечить практически беспрепятственное транспортирование груза через опоры; у кранов большей грузоподъемности этот размер должен быть 9... 11 м.
При В > (1,2... 1,5) Н конструкция и условия работы стоек опор и узлов их примыкания к мосту усложняются. В то же время с увеличением опорной базы удлиняются подкрановые пути. Поэтому в ряде случаев для увеличения расстояния между стойками на заданной высоте их выполняют Г-образной формы или укрепляют мост дополнительными поперечными кронштейнами.
Аналогично обеспечивают и наименьшее допустимое расстояние между грузовой подвеской и передней гранью опорной стойки у крана с одностоечными опорами. Здесь размеры опорной базы определяют исходя из условия беспрепятственного перемещения крана по путям, а также необходимости обеспечения примерного равенства вертикальных нагрузок на ходовые колеса. Следует максимально ограничивать ширину ходовых тележек и нижних частей кранов. Выступающие части механизмов передвижения, в том числе корпуса редукторов и зубчатые венцы ходовых колес, не должны располагаться ниже головки рельса. Опыт показывает, что более низкое расположение этих элементов резко увеличивает опасность их загрязнения и поломок.
Для выбора скоростей движения можно использовать общие указания, приведенные в технической литературе [1] При этом следует учитывать также безопасность работы, удобство управления, требуемую точность установки груза.
На производственных объектах (сборочных площадках, открытых полигонах по изготовлению железобетонных изделий и т. п. ), где работающие на технологических операциях люди не могут следить за перемещением, крана, при отсутствии ограждений подкрановых путей скорость передвижения крана не должна превышать 1 м/с. Это относится и к кранам с управлением из кабины. Однако для складов и площадок, где находится небольшое число рабочих, непосредственно связанных с перегрузочными операциями, такое ограничение отсутствует. Предельная скорость передвижения грузовой тележки Vmax должна назначаться с учетом протяженности ее рабочего хода, ограниченного длинной моста, обычно связанной с пролетом крана.
Для кранов тяжелого режима работы значения Vmax могут быть увеличены на 20…25 %. При относительно ограниченной высоте подъема груза нецелесообразны скорости подъема более/ 0,25...0,50 м/с. Это обусловливается также тем, что дальнейшее повышение скоростей подъема груза ведет к необходимости установки электродвигателей повышенной мощности, в результате чего увеличиваются масса и размеры грузовой тележки, а также сечения кабелей токоподвода грузовой тележки и крана. Скорости подъема и горизонтального передвижения груза ограничиваются еще и требованиями точности работы. Предельные значения номинальных рабочих скоростей, при широко применяемых в настоящее время системах приводов, не оснащенных дополнительными средствами регулирования, рекомендуется принимать по табл. 3 [1]. В ней приведены также значения ускорений.
2 Расчет механизма подъема
Расчет механизма подъема козлового крана заключается в выборе схемы запасовки и расчета грузового каната, двигателя, редуктора, муфт, тормоза, расчете барабана и крепления концов каната.
Исходные данные: грузоподъемность крана Q = 10 т, скорость подъема груза г = 10 м/c, высота подъема H = 8 м, группа режима работы – М6.
Согласно рекомендация по выбору полиспаста для грузоподъемности крана 10 тон кратность полиспаста должна быть 2 – 3, а сам полиспаст – сдвоенный. Принимаем механизм подъема с сдвоенным трехкратным полиспастом полиспастом.
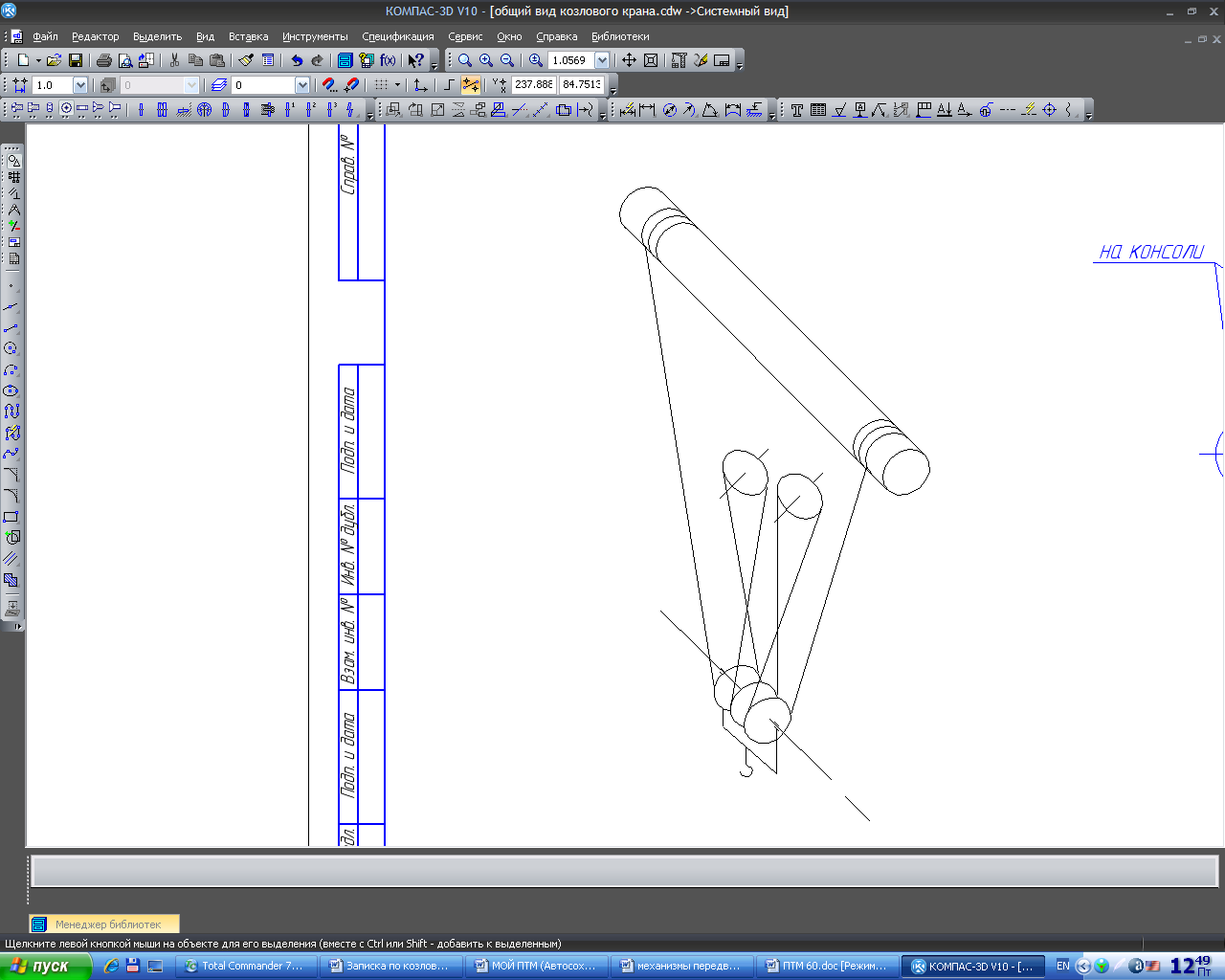
Рисунок 2 – схема запасовки грузового каната механизма подъема
Находим усилие в набегающей на барабан ветви каната по формуле:
![]()
где G – вес груза вместе с крюковой подвеской;
![]() – коэффициент полезного действия блока установленного на подшипниках качения;
– коэффициент полезного действия блока установленного на подшипниках качения;
a = 3 – кратность полиспаста;
t = 2 – число обводных блоков;
Подставим полученное значение G в (1) и найдем максимальное натяжение каната:
![]()
В соответствии с Правилами устройства и безопасной эксплуатации грузоподъемных кранов (далее Правила) выбор грузового каната ведется по следующей формуле:
![]()
где F0 – разрывное усилие каната в целом;
S – наибольшее натяжение ветви каната;
Zр = 4 – минимальный коэффициент использования каната;
![]()
Выбираем канат двойной свивки типа ЛК – Р конструкции 6Ч19 (1+6+6/6)+1о.с по ГОСТ 2688-80. Диаметр каната d = 14 мм, разрывное усилие в целом 98950 Н.
Далее необходимо рассчитать диаметр барабана. Согласно Правилам минимальный диаметр барабана D определяется по формуле:
![]()
где h = 16 – коэффициент выбора диаметра барабана в зависимости от
режима работы;
![]()
Принимаем диаметр барабана D = 510 мм и определяем параметры профиля канавок на барабане:

D – диаметр барабана;
d – диаметр каната;
t – шаг нарезки барабана;
h – глубина канавки;
r – радиус канавки;
Рисунок 3 – параметры профиля канавок на барабане;
Шаг канавки рассчитываем по формуле:
![]()
Радиус канавки равен:
![]()
Нормальная глубина канавки равна:
![]()
Далее определяем длину каната, навиваемую на барабан грузовой лебедки:
![]() где z1 = 2 – число неиспользуемых витков на барабане до места
где z1 = 2 – число неиспользуемых витков на барабане до места
крепления;
z2 = 3 – число витков каната, находящихся под креплением;
Тогда:
![]()
Определяем длину нарезной части барабана:
![]()
где m = 1 – число слоев навивок;
![]() - коэффициент неплотности навивки;
- коэффициент неплотности навивки;
![]() ; 0,62*2=1,24 м
; 0,62*2=1,24 м
При этом отношение ![]()
Минимальная толщина стенки литого чугунного барабана должна быть не менее ![]() при этом
при этом
![]()
тогда толщина стенки равна:
![]()
Приняв в качестве материала барабана чугун марки СЧ 15 (σв = 650 МПа, [σсж ] = 130 МПа), найдем напряжение сжатия в барабане:
![]()
Механизм подъема груза включает в себя электродвигатель и редуктор, которые необходимо выбрать из ряда выпускаемых промышленностью. Для привода механизмов грузоподъемных машин применяются крановые асинхронные электродвигатели, характеризующиеся повышенной перегрузочной способностью. Электродвигатель выбирается по каталогу согласно статической мощности в соответствии с режимом эксплуатации механизма.
Статическую мощность двигателя находим по формуле:
![]()
где ηпр = 0,85 – кпд механизма;
![]()

Рисунок 4 – схема механизма подъема
1 – редуктор; 2 – барабан; 3 – электродвигатель; 4 – тормоз; 5 – муфта.
Зная необходимую статическую мощность двигателя, выбираем электродвигатель с фазным ротором MTF 312-6, ПВ=40 %, мощность на валу двигателя Nдв = 15 кВт, частота вращения вала nдв = 955 об/мин, момент инерции ротора Iр = 0,225 кг∙м2.
Находим частоту вращения барабана:
![]() Рассчитываем передаточное число привода:
Рассчитываем передаточное число привода:
![]()
Находим мощность редуктора, учитывая коэффициент, учитывающий условия работы редуктора Kр = 1,7:
![]()
Выбираем редуктор Ц2-500, мощность на быстроходном валу Nр = 22,9 кВт, номинальное передаточное число U = 50,94.
Момент сил сопротивления при установившемся движении на валу двигателя для механизма подъема находим по формуле:
![]()
Где z = 2 – кратность полиспаста;
Номинальный момент, передаваемый муфтой, принимаем равным моменту статических сопротивлений, т.е Mмном = Мс = 198,3 Н∙м. Номинальный момент на валу двигателя равен:
![]()
Муфта соединительная выбирается исходя из указанного в ее технической характеристике значения передаваемого крутящего момента. Находим расчетный момент муфты:
![]() Где к1 = 1,3 – коэффициент, учитывающий степень ответственности
Где к1 = 1,3 – коэффициент, учитывающий степень ответственности
механизма;
к2 = 1,3 – коэффициент, учитывающий режим работы механизма;
![]()
Выбираем ближайшую по требуемому крутящем моменту упруго-пальцевую муфту № 1 с тормозным шкивом диаметром Dт = 200 мм и наибольшим передаваемым крутящим моментом 500 Н∙м. Момент инерции муфты Iм=0,125 кг∙м2, момент инерции двигателя и муфты
I = Iр + Iм =0,225 + 0,125 = 0,35 кг∙м2.
Средний пусковой момент двигателя:
![]()
где ![]() - максимальная кратность пускового
- максимальная кратность пускового
момента двигателя;
![]() – минимальная кратность пускового момента двигателя;
– минимальная кратность пускового момента двигателя;
![]()
Фактическое время пуска и торможения механизма должно соответствовать рекомендациям. У механизмов подъема груза фактическое время подъема равно:
![]()
при опускании груза:
![]()
где ![]() - коэффициент, учитывающий влияние вращающихся масс
- коэффициент, учитывающий влияние вращающихся масс
привода механизма;
![]()
Находим фактическую частоту вращения барабана:
![]()
Находим фактическую скорость подъема груза:
![]() ;
;
Рассчитываем ускорение при пуске:
![]()
Далее, используя усредненный график использования по грузоподъемности, построенным на основе опыта эксплуатации кранов, определим моменты, развиваемые двигателем, и время его пуска при подъеме и опускании груза в различные периоды работы механизма.
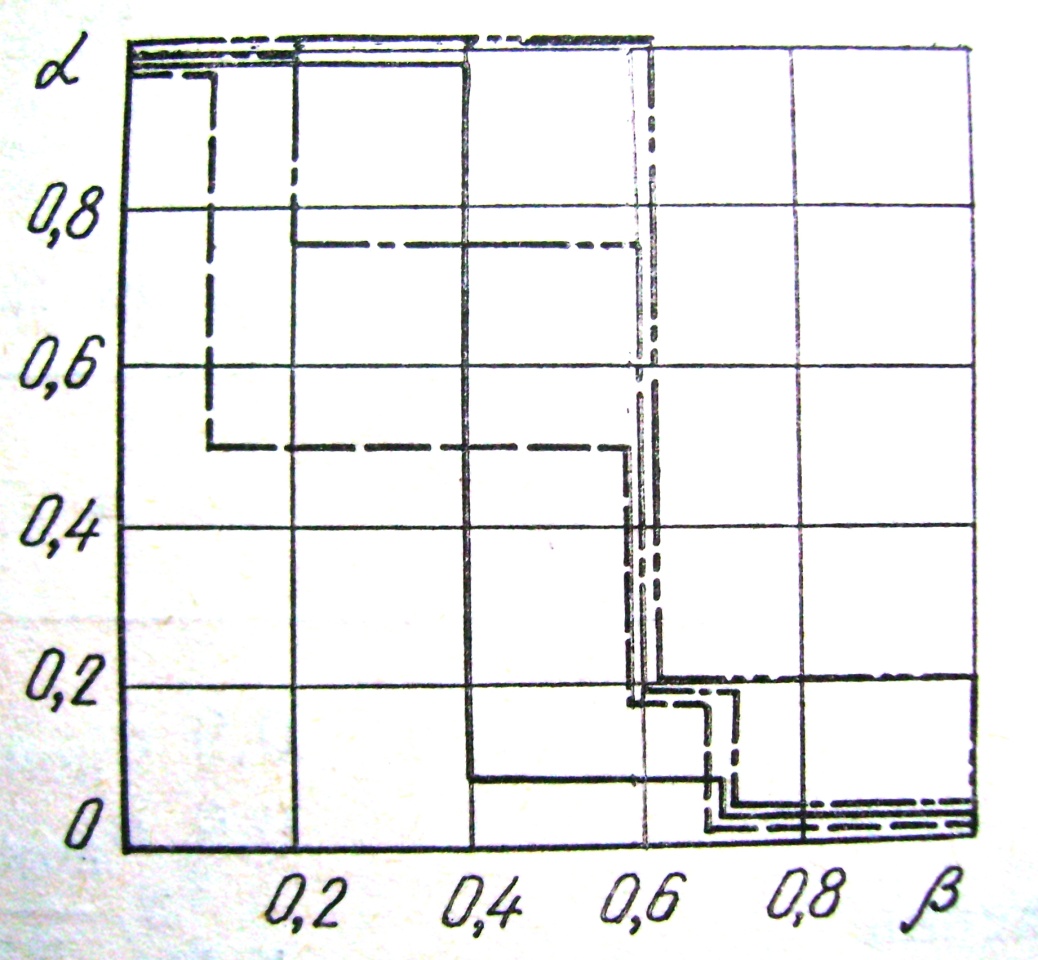
Рисунок 5 - усредненный график загрузки механизма подъема крана;
Согласно графику, за время цикла (подъем и опускание груза) механизм будет работать с номинальным грузом Q = 10000 кг – 2 раз, с грузом 0,7Q = 7000 кг – 4 раз, с грузом 0,17Q = 1700 кг – 1 раз, с грузом 0,05Q = 500 кг – 3 раза. Используя формулы, а также формулу для нахождения момента сил сопротивления при опускании груза рассчитываем и сводим в таблицу необходимые данные :
![]()
Таблица 1 – моменты, развиваемые двигателем и время его пуска;
| Наименование показателя | Обозначение | Единица | Результаты расчета при массе поднимаемого груза, кг | |||
| 10000 | 7000 | 1700 | 500 | |||
| Натяжение каната при подъеме | Sпод | Н | 16833,28 | 11560 | 2808 | 825 |
| Момент при подъеме груза | Мс.под | Н∙м | 198,3 | 136,2 | 33,1 | 9,72 |
| время пуска при подъеме | tп.под | с | 0,229 | 0,26 | 0,14 | 0,12 |
| Натяжение каната при опускании | Sоп | Н | 16186,5 | 11330,55 | 2751,7 | 809,325 |
| Момент при опускании груза | Мс.оп | Н∙м | 190,65 | 133,5 | 32,41 | 9,53 |
| время пуска при опускании | tп.оп | с | 0,108 | 0,1103 | 0,1128 | 0,1137 |
Средняя высота подъема груза составляет 0,5…0,8 номинальной высоты H= =10 м. Примем Hср = 0,8 Н = 6,4 м, тогда время установившегося движения равно:
![]()
Сумма времени пуска при подъеме и опускании груза за цикл работы механизма равен:
![]()
![]() ;
;
Общее время включения двигателя за цикл:
![]()
Далее рассчитываем среднеквадратичный момент преодолеваемый двигателем:
![]()
![]()

Среднеквадратичная мощность двигателя равна:
![]()
Что бы выбрать тип тормоза, необходимо рассчитать момент статического сопротивления на валу двигателя при торможении:
![]()
Необходимый момент, развиваемый тормозом равен:
![]() ;
;
где КТ = 2 – коэффициент запаса торможения;
![]()
Выбираем тормоз ТКГ – 160 с тормозным моментом 100 Н∙м, диаметром тормозного шкива 160 мм. Регулировкой можно получить требуемый тормозной момент 63,99 Н∙м.
Далее определяем время торможения при опускании груза:
![]()
Для среднего режима работы находим путь торможения механизма подъема груза:
![]()
Находим время торможения в предположении, что скорости подъема и опускания груза одинаковы:
![]()
И в конце находим замедление при торможении:
![]()
3 Расчет механизма передвижения грузовой
тележки
Расчет механизма передвижения тележки заключается в подборе и расчете ходовых колес, определении сопротивлений передвижению, выбора двигателя, редуктора, муфты и тормоза.
Выбираем подвесную тележку с канатным приводом.
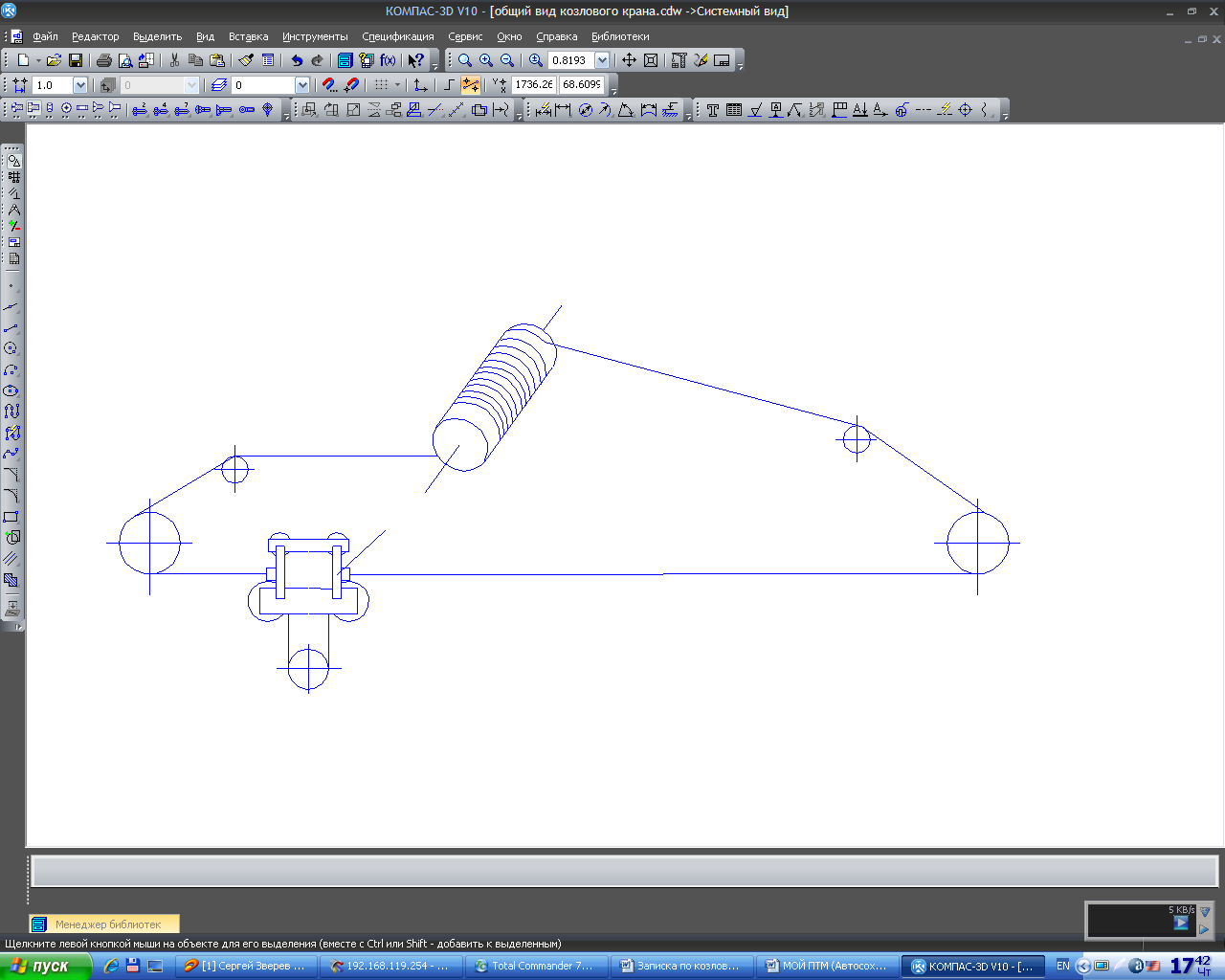
Рисунок 6 – схема запасовки механизма передвижения
Рекомендуемый диаметр ходовых колес для грузоподъемности 5…10т равен 250…360 мм. Принимаем Dк=320 мм.
Коэффициент трения качения ходовых колес по рельсам с плоской головкой =0.0003 м. Коэффициент трения в подшипниках качения ходовых колес f=0.02.
Диаметр вала цапфы ходового колеса
dк=(0.2…0.25)Dк ,мм
dк=60…75 мм
Принимаем dк=70мм
Общее сопротивление передвижению тележки, Н:
![]()
где Wтр – сопротивление от трения;
Wукл – сопротивление от уклона рельсового пути;
Wтр – сопротивление от ветровой нагрузки;
Wбл – сопротивление в блоках;
Сопротивление от трения
![]()
где кр – коэффициент, учитывающий трение реборд о рельсы; кр=2.5 [1.с.68];
Gт – масса грузовой тележки, кг;
Q – грузоподъемность крана, кг;
– коэффициент трения качения ходовых колес, м;
f – коэффициент трения в подшипниках качения ходовых колес;
![]()
Сопротивление от уклона рельсового пути
![]()
где sinα – угол наклона пути;
![]()
Сопротивление от ветровой нагрузки
![]()
где р – распределенная ветровая нагрузка;
А – наветревоемая площадь; А≈1м2
![]()
где q – динамическое давление ветра. Если район установки крана неизвестен принимают q = 450Па [1.с.21];
к – коэффициент учитывающий изменение динамического давления по высоте, к = 1 т.к Н = 8м [1.с.21];
с – коэффициент аэродинамической силы, с = 1.8 [1.с.21];
n – коэффициент перегрузки, n = 1.1 [1.с.21];
![]()
![]()
Сопротивление в блоках:
![]()
η – КПД блоков; ![]()
![]()
![]()
Усилие в канате, набегающего на барабан
![]()
где η0 – общий КПД, ![]()
ηоб – КПД обводных блоков;
ηбл – КПД блоков;
z – число обводных блоков;
![]()
![]() [1.с.54.табл.2.1]
[1.с.54.табл.2.1]
![]()
Расчетное разрывное усилие в канате
![]()
![]()
Принимаем канат по ГОСТ 2688 – 80 двойной свивки типа ЛК-Р конструкции 6х19 (1+6+6/6)+1 о.с диаметром dk=16,5 мм имеющий при маркировочной группе проволок 1764 МПа разрывное усилие F=166000 Н.
Канат – 19.5 – Г – 1 – Н – 19764 ГОСТ 2688-80 [1.с.280]
Далее необходимо рассчитать диаметр барабана. Согласно Правилам минимальный диаметр барабана D определяется по формуле:
![]()
где h = 15 – коэффициент выбора диаметра барабана в зависимости от
режима работы;
![]()
Принимаем диаметр барабана D = 335 мм и определяем параметры профиля канавок на барабане:
Далее определяем длину каната, навиваемую на барабан грузовой лебедки:
![]() где z1 = 2 – число неиспользуемых витков на барабане до места
где z1 = 2 – число неиспользуемых витков на барабане до места
крепления;
z2 = 3 – число витков каната, находящихся под креплением;
Тогда:
![]()
Определяем длину барабана:
![]()
где m = 1 – число слоев навивок;
![]() - коэффициент неплотности навивки;
- коэффициент неплотности навивки;
![]() ; 0,79*2=1,59 м
; 0,79*2=1,59 м
Минимальная толщина стенки литого чугунного барабана должна быть не менее ![]() при этом
при этом
![]()
тогда толщина стенки равна:
![]()
Приняв в качестве материала барабана чугун марки СЧ 15 (σв = 650 МПа, [σсж ] = 130 МПа), найдем напряжение сжатия в барабане:
![]()
Механизм передвижения груза включает в себя электродвигатель и редуктор, которые необходимо выбрать из ряда выпускаемых промышленностью. Для привода механизмов грузоподъемных машин применяются крановые асинхронные электродвигатели, характеризующиеся повышенной перегрузочной способностью. Электродвигатель выбирается по каталогу согласно статической мощности в соответствии с режимом эксплуатации механизма.
Статическую мощность двигателя находим по формуле:
![]()
где ηпр = 0,85 – кпд механизма;
![]()
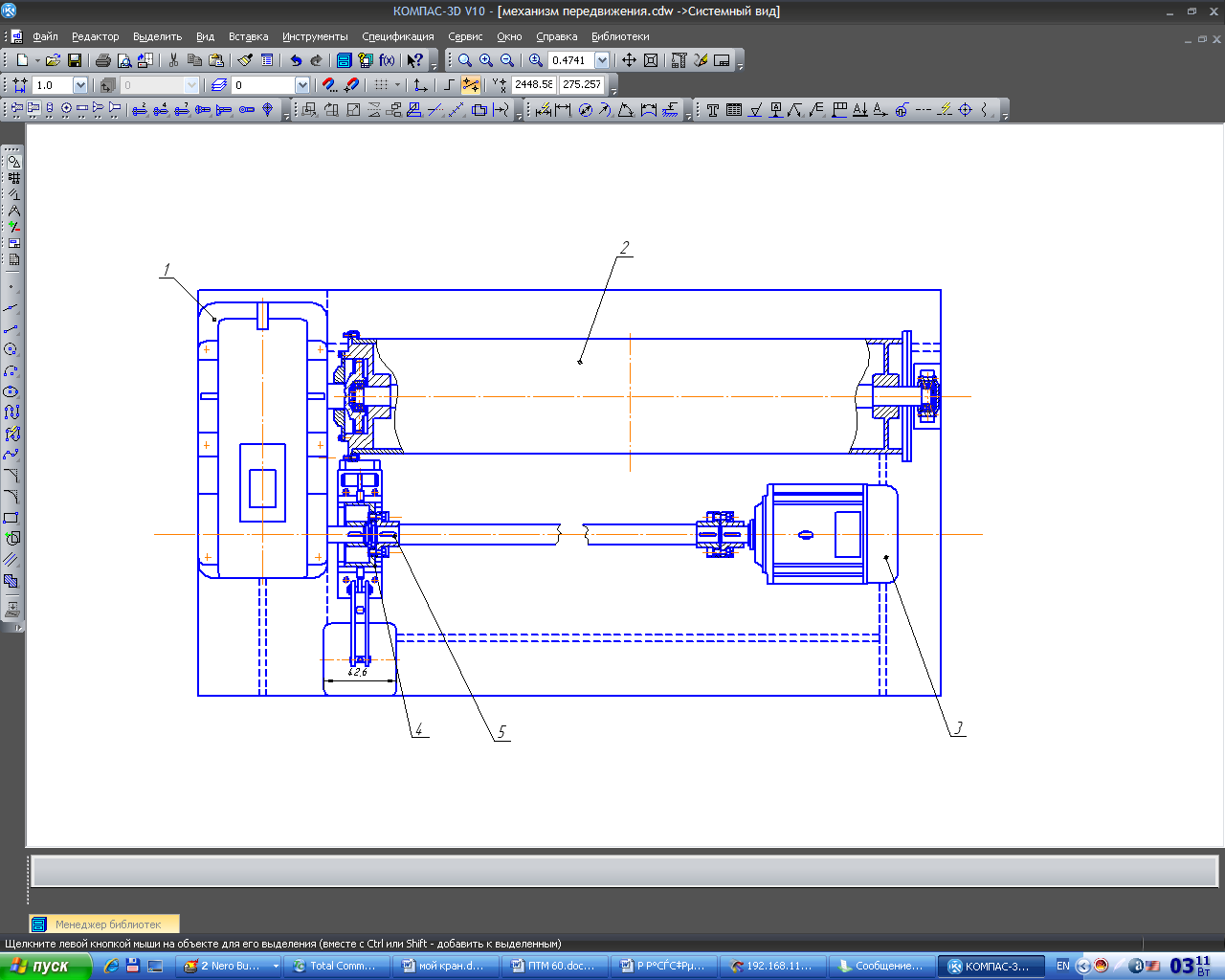
Рисунок 7 – схема механизма передвижения
1 – редуктор; 2 – барабан; 3 – электродвигатель; 4 – тормоз; 5 – муфта.
Зная необходимую статическую мощность двигателя, выбираем электродвигатель с фазным ротором MTF 111-6, ПВ=40 %, мощность на валу двигателя Nдв = 3,5 кВт, частота вращения вала nдв = 885 об/мин, момент инерции ротора Iр = 0,045 кг∙м2.
Находим частоту вращения барабана:
![]()
Рассчитываем передаточное число привода:
![]()
Находим мощность редуктора, учитывая коэффициент, учитывающий условия работы редуктора Kр = 1,7:
![]()
Выбираем редуктор Ц2-400, номинальное передаточное число U = 50,94.
Момент сил сопротивления при установившемся движении на валу двигателя для механизма подъема находим по формуле:
![]()
где z = 1 – кратность полиспаста;
Номинальный момент, передаваемый муфтой, принимаем равным моменту статических сопротивлений, т.е Mмном = Мс = 91,4 Н∙м. Номинальный момент на валу двигателя равен:
![]() Муфта соединительная выбирается исходя из указанного в ее технической характеристике значения передаваемого крутящего момента. Находим расчетный момент муфты:
Муфта соединительная выбирается исходя из указанного в ее технической характеристике значения передаваемого крутящего момента. Находим расчетный момент муфты:
![]() Где к1 = 1,3 – коэффициент, учитывающий степень ответственности
Где к1 = 1,3 – коэффициент, учитывающий степень ответственности
механизма;
к2 = 1,3 – коэффициент, учитывающий режим работы механизма;
![]()
Выбираем ближайшую по требуемому крутящем моменту упруго-пальцевую муфту № 1 с тормозным шкивом диаметром Dт = 200 мм и наибольшим передаваемым крутящим моментом 500 Н∙м. Момент инерции муфты Iм=0,125 кг∙м2, момент инерции двигателя и муфты
I = Iр + Iм =0,045 + 0,125 = 0,17 кг∙м2.
Средний пусковой момент двигателя:
![]()
где ![]() - максимальная кратность пускового
- максимальная кратность пускового
момента двигателя;
![]() – минимальная кратность пускового момента двигателя;
– минимальная кратность пускового момента двигателя;
![]()
Фактическое время пуска и торможения механизма должно соответствовать рекомендациям. У механизмов передвижения груза фактическое время равно:
![]()
где ![]() - коэффициент, учитывающий влияние вращающихся масс
- коэффициент, учитывающий влияние вращающихся масс
привода механизма;
![]()
Находим фактическую частоту вращения барабана:
![]() Находим фактическую скорость подъема груза:
Находим фактическую скорость подъема груза:
![]() ;
;
Рассчитываем ускорение при пуске:
![]()
Проверяем суммарный запас сцепления. Для этого найдем:
А) суммарную нагрузку на привод колеса без груза
![]()
В) сопротивление передвижению грузовой тележки без груза, Н:
![]()
![]()
где: zпр- число приводных колес;
z – общее число ходовых колес;
f – коэффициент трения (приведенной к цапфе вала) в подшипниках
опор вала ходового колеса
- коэффициент трения качения ходовых колес по рельсам м;
dk – диаметр цапфы вала ходового колеса, м:
kp – коэффициент, учитывающий дополнительное сопротивления от трения реборд ходовых колес
Выбор тормоза
Момент статического сопротивления на валу двигателя при торможении механизма
![]()
где: т – КПД привода от вала барабана до тормозного вала;
U – общее передаточное число между тормозным валом и валом барабана.
![]()
Необходимый по нормам тормозной момент, развиваемый тормозом выбираем из условия.![]()
где кт – коэффициент запаса торможения (для тяжелого режима кт=2.0).
![]()
Выбираем тормоз ТКГ – 300 со следующими параметрами: тормозной момент 500 Н·м, диаметром тормозного шкива Dт=300 мм. [1.с.342]
4 Расчет стяжки козлового крана
Для расчета стяжки на разрыв, нам нужно найти силу стремящуюся разорвать ее.
Для этого нам должны быть известны:
Gо= Gтел+Gгр+Gпр – вес действующий на стяжку;
где Gтел=4000 кг – масса тележки;
Gгр = 10000 кг – масса груза;
Gпр = 8000 кг – масса половины пролета крана;
Gо=4000+10000+8000=24000кг=235440Н;
Вес Gо будет действовать на обе опоры одинаково, по этому действие веса на одну опору будет равным G=G0 / 2=117220Н.
Для расчета нам так же понадобится масса одного погонного метра для швеллера №40, который мы предварительно выбрали, она будет равна 35,18 кг. Длина стяжки 12 м, по этому ее полная масса будет равна422,13 кг. Но так-так конструкция стяжки состоит из двух швеллеров, то полученную массу нам нужно умножить на 2. Откуда и получим потребную нам массу 844,32 кг. Эта масса будет равна распределенной нагрузке q, поскольку она будет возникать от собственного веса стяжки. Откуда q=844,32 кг=8282 Н.
Следовательно, для расчета нам понадобятся следующие данные:
G=117220 Н – вес действующий на одну опору;
q= 8282 Н – распределенная нагрузка от действия собственного веса;
L1 = 12 м – длина стяжки;
L = 14 м – длина всей балки.
Составим расчетную схему для нахождения разрывающей силы Fx:
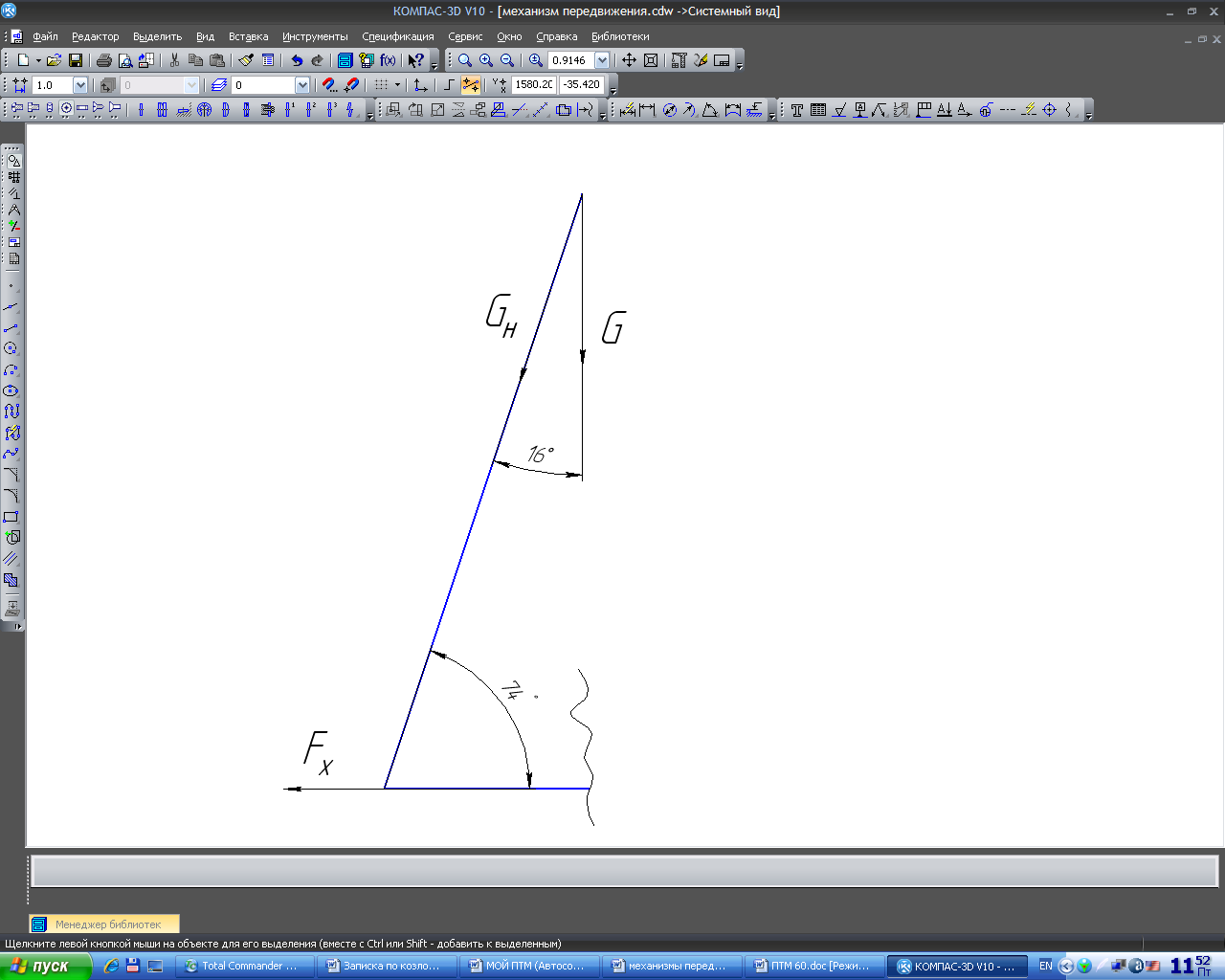
Рисунок 8 – расчетная схема
Найдем наклонную силу от составляющей веса Gн:
![]()
Далее найдем горизонтальную растягивающую силу Fx:
![]()
Составим упрощенную схему стяжки, для построения эпюр:
 рисунок 9 – эпюры изгибающих моментов
рисунок 9 – эпюры изгибающих моментов
Найдем реакции опор в точках А и В:
![]()
![]()
![]()
![]()
Найдём максимальный момент в опасном сечении:
![]()
Выбираем стандартный гнутый профиль со следующими данными:
Швеллер №40; Wx=458,99 см3- момент сопротивления относительно оси X;
Площадь сечения А=44, 82 см2.
Найдем сопротивление при разрыве:
Полученное значение должно соответствовать условию:
![]()
Где Ry=225 МПа;
γc=0.9;
![]()
Условие выполнилось, исходя из швеллер выбран правильно.
5 Охрана труда при эксплуатации однобалочных мостовых кранов
Машинист грузоподъемных кранов обязан: знать требования знать инструкцию для машинистов грузоподъемных кранов, а также инструкцию завода-изготовителя по монтажу и эксплуатации крана; знать безопасные способы строповки, зацепки грузов и складирования; контролировать работу стропальщика и отвечать за действия прикрепленного к нему для прохождения стажировки ученика, а также за нарушения требований должностной инструкции и инструкции завода-изготовителя по монтажу и эксплуатации крана; проверять наличие приборов и устройств безопасности на кране (концевых выключателей, указателя грузоподъемности в зависимости от вылета стрелы, сигнального прибора, аварийного рубильника, ограничителя грузоподъемности, анемометра, нулевой блокировки); проверять исправность съемных грузозахватных приспособлений и тары; сообщать о замеченных неисправностях железнодорожного пути ответственному за безопасное производство работ кранами; производить работы с использованием крана только по сигналу стропальщика[5].
Если стропальщик дает сигнал, действуя вопреки инструкции, то машинист по такому сигналу не должен производить требуемый маневр крана. За повреждения, причиненные действиями крана вследствие выполнения неправильно поданного сигнала, несут ответственность как машинист, так и стропальщик, подавший неправильный сигнал. Обмен сигналами между стропальщиком и машинистом должен производиться по установленному в организации порядку. Сигнал "Стоп" крановщик обязан выполнять независимо от того, кто его подает;
определять по указателю грузоподъемности грузоподъемность крана для каждого вылета стрелы.
Перемещение груза можно производить только при отсутствии людей в зоне работы крана.
Указанные требования машинист должен выполнять также при подъеме и перемещении грейфера или грузоподъемного магнита; при погрузке и разгрузке вагонеток, автомашин и прицепов к ним, железнодорожных полувагонов и платформ убедиться в отсутствии людей на транспортных средствах; устанавливать крюк подъемного механизма над грузом так, чтобы при подъеме груза исключалось косое натяжение грузового каната; при подъеме груза массой, близкой к разрешенной грузоподъемности для данного вылета стрелы, поднять его на высоту не более 200—300 мм, чтобы убедиться в устойчивости крана и исправности действия тормозов, после чего производить его подъем на нужную высоту;
при подъеме стрелы следует следить, чтобы она не поднималась выше положения, соответствующего наименьшему рабочему вылету; при подъеме и опускании груза, находящегося вблизи стены, колонны, штабеля, железнодорожного вагона, автомашины, станка или другого оборудования, предварительно убедиться в отсутствии людей между поднимаемым грузом и указанными частями здания, транспортными средствами или оборудованием, а также в невозможности задевания стрелой или поднимаемым грузом стен, колонн, вагона и других препятствий.
Машинист грузоподъемного крана несет ответственность за нарушения требований Правил устройства и безопасной эксплуатации кранов; ему запрещается:
устанавливать кран под действующей линией электропередачи любого напряжения. Устанавливать кран или производить перемещение груза на расстоянии ближе 30 м от крайнего провода линии электропередачи машинист может только при наличии наряда-допуска, подписанного главным инженером или главным энергетиком организации, являющейся владельцем крана.
Работа крана в этом случае должна производиться под непосредственным руководством ответственного лица, назначенного приказом по организации, с указанием его фамилии; при наличии у крана двух механизмов подъема одновременная их работа. Крюк неработающего механизма должен быть всегда поднят в наивысшее положение; отключать приборы безопасности; производить подъем или опускание груза, когда в зоне работы крана находятся люди;
допускать к обвязке или зацепке грузов лиц, не имеющих удостоверения стропальщика, а также применять грузозахватные приспособления без бирок или клейм.
Машинист в этих случаях должен прекратить работу краном и поставить в известность лицо, ответственное за безопасное производство работ кранами;
поднимать или кантовать груз, масса которого превышает грузоподъемность крана, для данного вылета стрелы. Если машинист не знает массы груза, то он должен получить в письменном виде сведения о массе груза у лица, ответственного за безопасное производство работ кранами; опускать стрелу с грузом до вылета, при котором грузоподъемность крана будет меньше массы поднимаемого груза;
производить резкое торможение при повороте стрелы с грузом; подтаскивать груз по земле, рельсам и лагам крана при косом натяжении канатов, а также передвигать железнодорожные вагоны, платформы, вагонетки или тележки при помощи крюка; поднимать крюком или грейфером груз, засыпанный землей или примерзший к земле, заложенный другими грузами, укрепленный болтами или залитый бетоном; освобождать краном защемленные грузом съемные грузозахватные приспособления; поднимать железобетонные изделия с поврежденными петлями, неправильно обвязанный груз, находящийся в неустойчивом положении, подвешенный за рог двурогого крюка, а также в таре, заполненной выше бортов;
укладывать груз на электрические кабели и трубопроводы, а также на краю откоса или траншеи; поднимать груз с находящимися на нем людьми, а также груз, выравниваемый массой людей или поддерживаемый руками;
передавать управление краном лицам, не имеющим прав на управление краном, а также допускать к самостоятельному управлению учеников и стажеров без своего наблюдения за ними.
Заключение В данном курсовом проекте изложены: 1) общие расчеты механизмов козлового крана грузоподъемностью 10 т, скорость подъема груза 10 м/мин, высота подъема груза 8 м, пролет 20 м; 2) методика выбора и проверки электродвигателей, редукторов, муфт и тормозов механизмов подъема груза и передвижения тележки; 3) методика расчета металлоконструкции стяжки крана.Список используемых источников
1. А.В. Кузьмин, Ф.Л. Марон. Справочник по расчетам механизмов подъемно – транспортных машин. – 2-е изд. Перерад и доп.- Мн.: Выш. Шк., 1983 – 350с.
2. Справочник по кранам. Александров М.П., Гохберг М.М., том 1,2. -Л: Машиностроение,1988.
3. Подъёмно-транспортные машины. Атлас конструкций., под ред. Александрова М.П. и Решетникова Д.Н.-М.:1987.
4. Конструирование узлов и деталей машин П.Ф. Дунаев. Высшая школа, 1985
5. Правила, устройства и безопасной эксплуатации грузоподъемных кранов – Мн.: ЦОТЖ, 2006. – 219 с.
Приложение А