| Скачать .docx |
Курсовая работа: Системы управления электроподвижным составом
Федеральное агентство по железнодорожному транспорту
Уральский государственный университет
путей сообщения.
кафедра: локомотивная тяга
Курсовой проект
по дисциплине “Системы управления ЭПС ”
Выполнил:
Проверил:
Екатеринбург
2006
Задание на курсовой проект.
Общие данные:
Напряжение на пантографе (![]() ), 3000В
), 3000В
Номинальное напряжение на двигателе.(![]() ),....................... 1500В
),....................... 1500В
КПД тягового двигателя в часовом режиме ![]() ....................... 0,94
....................... 0,94
КПД зубчатой передачи ![]() ..................................................... 0,975
..................................................... 0,975
Давление от оси на рельсы,……………………………………..230![]()
Ускорение одиночного электровоза при трогания с места,
на площадке,…………………………………………………….0,3![]()
Индивидуальные данные:
Ток часового режима ![]() ........................................................... 440А
........................................................... 440А
Количество двигателей ![]() ........................................................ ……..6
........................................................ ……..6
Часовое значение приведённого магнитного потока ![]()
![]() …………………………………………………………….28,0
…………………………………………………………….28,0![]()
Узел схемы цепи управления....................................................... …...БВ
Кривая намагничивания в относительных единицах:
|
|
0,3 |
0,6 |
0,8 |
1 |
1,4 |
1,8 |
|
|
0,56 |
0,83 |
0,93 |
1 |
1,1 |
1,17 |
1. Определение номинальных величин.
Исходя из приведенных данных, рассчитываем основные номинальные (часовые) параметры тягового двигателя проектируемого электровоза.
Сила тяги на ободе колеса определяется по формуле:
![]() ………….
………….![]()
![]()
Мощность на валу тягового двигателя:
 ………………………………
………………………………![]()
![]()
Номинальная скорость при часовом режиме:
 ……………………………………
……………………………………![]()
где:![]() - сопротивление обмоток тягового двигателя.
- сопротивление обмоток тягового двигателя.
![]()
 ……………………………………….
……………………………………….![]()
где: 0,04 – коэффициент падения напряжения на обмотках двигателя
Все полученные значения сводим в таблицу 1.1
Таблица 1.1 – Номинальные величины, а также в таблице представлены величины для построения электромеханических характеристик для этапа 3.1.
|
|
|
|
|
|
||
|
|
|
|
||||
| 132 |
15,68 |
6,828 |
40,968 |
30,925 |
62,622 |
94,5 |
| 264 |
23,24 |
20,243 |
121,458 |
19,958 |
41,472 |
62,987 |
| 352 |
26,04 |
30,342 |
181,452 |
17,349 |
36,55 |
55,751 |
| 440 |
28,0 |
40,60 |
243,60 |
15,704 |
33,561 |
51,419 |
| 616 |
30,8 |
62,598 |
375,588 |
13,493 |
29,727 |
45,961 |

2. Выбор (составление) структуры схемы силовой цепи
На основании исходных данных и определенных номинальных величин определяем количество группировок тяговых двигателей и напряжения на ходовых позициях каждой группировки, а также способов перегруппировки.
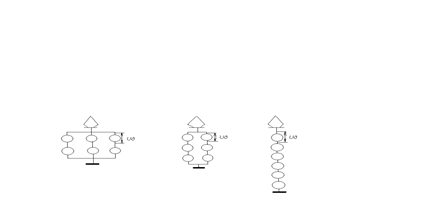
Опираясь на заданные параметры по количеству двигателей электровоза и напряжению на них, можно выделить три наиболее приемлемых вида соединения ТЭД.
1) Сериесное (последовательное) соединение: все шесть ТЭД включены в цепь последовательно, напряжение на каждом ТЭД составляет:![]()
2) Сериесно-паралельное соединение: ТЭД включены в цепь в две параллельные цепи по три двигателя. Напряжение на ТЭД ![]()
3) Параллельное соединение: ТЭД включены в цепь в три параллельные цепи по два тяговых двигателя. Напряжение на ТЭД ![]() , что соответствует номинальному заданному значению.
, что соответствует номинальному заданному значению.
Виды группировок ТЭД представлены на рисунке 2.1.
Способ перегруппировки ТЭД (переход с одного соединения на другое) принимаем «вентильный», так как при этом варианте сокращается время перехода и упрощается схема электровоза.
3. Расчёт пускового резистора
3.1 Расчёт электромеханических характеристик при номинальном напряжении на двигателях
Электромеханическими характеристиками называются зависимости скорости и силы тяги от тока якоря на двигателе. Для того чтобы построить графики этих зависимостей, надо пересчитать заданную характеристику![]() , представленную в таблице в абсолютных значениях, для этого выберем некоторый ряд цифр
, представленную в таблице в абсолютных значениях, для этого выберем некоторый ряд цифр ![]() , где единицы соответствуют отношению:
, где единицы соответствуют отношению: ![]() , т.е.
, т.е. ![]() .
.
Из таблице 2 видно что в ряде цифр ![]() единице соответствует отношение
единице соответствует отношение![]() режима.
режима.
Пользуясь формулами 1.1; 1.2; 1.3; находим силу тяги на ободе колеса ![]() , и скорость движения
, и скорость движения ![]() при вычисленных значениях
при вычисленных значениях ![]() и
и ![]() для параллельного соединения ТЭД
для параллельного соединения ТЭД ![]()
Далее производим расчеты для скоростных характеристик при пониженном напряжении на двигателях (последовательное и последовательно-паралельное соединение ТЭД)
Все произведенные расчеты заносим в таблицу 1.1
Графические зависимости ![]() ,
, ![]() ,
, ![]() ,
, ![]() , представлены на рисунке 3.1.1 ,
, представлены на рисунке 3.1.1 ,![]() на рисунке 3.1.2.
на рисунке 3.1.2.
3.2 Расчёт ступеней пускового резистора
Целью расчёта является получение значений сопротивлений по ступеням регулирования (позициям контроллера машиниста).
Расчёт ведётся по отношению к одному тяговому двигателю. В конце расчёта в зависимости от количества группировок и схемы соединения тяговых двигателей определяются значения сопротивления по позициям контроллера в целом для электровоза.
Расчёт выполняется графоаналитическим способом по методике [1,с.18-28], который можно представить состоящим из нескольких этапов.
3.2.1 Определение максимального и минимального пусковых токов
При пуске стремятся реализовать максимальную силу тяги и соответствующий её максимальный пусковой ток. Их значения определяют по условиям сцепления колеса с рельсом. Наибольшая сила тяги при пуске ограничивается условиями сцепления движущегося колеса с рельсом или перегрузочной способностью тяговых двигателей. Минимальный пусковой ток определяется по коэффициенту неравномерности ![]() ,
, ![]()
 ,
, ![]() .
. ![]()
 .
.
| V, км/ч |
0 |
10 |
30 |
80 |
| ψ к |
0,34 |
0,285 |
0,264 |
0,24 |
| I ,А |
|
640 |
600 |
560 |
| F кд сц |
78,2 |
65,55 |
60,63 |
55,2 |
Fк сц = П0 · ψ к
Ψ к =0,28 + 3/(50 + 20 · V) – 0,0007 · V
m э = П0 · n д =230 ·6= 1380 кН= 138 т.
3.2.2. Расчёт разгонных ступеней пускового резистора
Графическим способом строятся ступенчатые зависимости сопротивления пускового резистора, отнесённого к одному тяговому двигателю, от скорости движения. Все построения ведутся в двух квадрантах.
Сначала в координатах ![]() наносятся рассчитанные ранее скоростные характеристики для каждой группировки двигателей, а так же отмечаются значения максимального и минимального пусковых токов.
наносятся рассчитанные ранее скоростные характеристики для каждой группировки двигателей, а так же отмечаются значения максимального и минимального пусковых токов.
Затем в координатах ![]() строятся линейные зависимости
строятся линейные зависимости ![]() , соответствующие неизменным значениям максимального и минимального пусковых токов. Далее строим ступенчатые зависимости по которым определяем значение сопротивлений, а в квадрате количество ступеней.
, соответствующие неизменным значениям максимального и минимального пусковых токов. Далее строим ступенчатые зависимости по которым определяем значение сопротивлений, а в квадрате количество ступеней.
Разгонные ступени служат для разгона ЭПС до скорости соответствующий полному выводу сопротивлений из цепи ТЭД и выходу на характеристику без реостатного соединения.
Абсциссы точек ![]() находим из выражений:
находим из выражений:
![]()
![]()
Ординаты точек ![]() определяются по характеристикам
определяются по характеристикам ![]() при минимальных и максимальных значениях тока.
при минимальных и максимальных значениях тока.
Все построения изображаются на рисунке 3.2.1
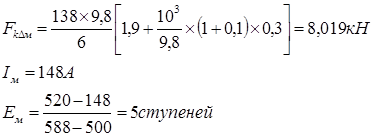
3.3 Расчёт маневровых ступеней пускового резистора
Маневровые ступени служат для плавного трогания поезда с места и маневровой работы. Число маневровых ступеней определяется по формуле:
![]()
где:![]() - ток первой маневровой позиции;
- ток первой маневровой позиции;
![]() - ток первой разгонной позиции, определяемый из графика на рисунке
- ток первой разгонной позиции, определяемый из графика на рисунке ![]()
Для расчета ![]() , определяем силу тяги
, определяем силу тяги ![]() , на первой позиции по формуле:
, на первой позиции по формуле:
![]()
где: ![]()
![]()
По характеристике ![]() , на рисунке находим значение тока соответствующее значению
, на рисунке находим значение тока соответствующее значению ![]()
Ток любой маневровой ступени находится по формуле:
![]()
Сопротивления пускового резистора на маневровых ступенях определяются по формуле:
![]()
Полученные значения ![]() заносим в таблицу 3.3.1
заносим в таблицу 3.3.1
Таблица 3.3.1 Токи и сопротивления маневровых ступеней:
| Ступень |
1 |
2 |
3 |
4 |
5 |
|
|
148 |
222 |
297 |
371 |
446 |
|
|
3,24 |
2,11 |
1,55 |
1,21 |
0,98 |
3.4 Расчёт дополнительных ступеней пускового резистора
Дополнительные ступени предусматривают для плавного перехода с одной группировки тяговых двигателей на другую. В курсовом проекте используется упрощённый способ. Принимаем по 2 дополнительные ступени для «П» и «СП» соединений.
На графике рисунка 3.4 в координатах V(R) добавляется ещё по 2 ступени. Значение сопротивлений дополнительных ступеней снимается с чертежа. Таким образом обеспечивается условие, что бросок тока при переходе с одной дополнительной ступени на другую, а затем и на разгонную не превысит разности между максимальным и минимальным током. Значения сопротивлений дополнительных ступеней заносим в таблицу 3.4.1
Таблица 3.4.1– Сопротивления дополнительных позиций
| Ступени |
1 |
2 |
| «С» - «СП» |
1,33 |
1,1 |
| «СП» - «П» |
1,45 |
1,15 |
3.5. Расчёт ступеней пускового резистора электровоза.
Ранее рассчитанные значения сопротивления пускового резистора относились к одному тяговому двигателю. Сопротивления ступеней, приходящихся в целом на электровоз, рассчитываются по формуле:
![]()
где, ![]() и
и ![]() – соответственно число последовательно соединенных двигателей и число параллельных ветвей двигателей на ( С, СП, П соединении тяговых двигателей );
– соответственно число последовательно соединенных двигателей и число параллельных ветвей двигателей на ( С, СП, П соединении тяговых двигателей );
для «С» соединения тяговых двигателей:
![]()
для «СП» соединения тяговых двигателей:
![]()
для «П» соединения тяговых двигателей:
![]()
Результаты расчётов сводим в таблицу 3.5.1
Таблица 3.5.1 – Сопротивление ступеней пускового резистора.
| Группировка ТЭД |
Вид ступени |
Позиция КТМ |
Сопротивление Ом |
|
| на 1 ТЭД |
на электровозе |
|||
| С |
Маневровые |
1 |
3,24 |
19,44 |
| 2 |
2,11 |
12,66 |
||
| 3 |
1,55 |
9,3 |
||
| 4 |
1,21 |
7,26 |
||
| 5 |
0,98 |
5,88 |
||
| Разгонные |
6 |
0,82 |
4,92 |
|
| 7 |
0,69 |
4,14 |
||
| 8 |
0,55 |
3,3 |
||
| 9 |
0,42 |
2,52 |
||
| 10 |
0,31 |
1,86 |
||
| 11 |
0,21 |
1,26 |
||
| 12 |
0,1 |
0,6 |
||
| 13 |
0 |
0 |
||
| СП |
Дополнительные |
14 |
1,33 |
1,995 |
| 15 |
1,1 |
1,605 |
||
| Разгонные |
16 |
0,89 |
1,335 |
|
| 17 |
0,72 |
1,08 |
||
| 18 |
0,56 |
0,84 |
||
| 19 |
0,42 |
0,63 |
||
| 20 |
0,3 |
0,45 |
||
| 21 |
0,185 |
0,28 |
||
| 22 |
0,08 |
0,12 |
||
| 23 |
0 |
0 |
||
| П |
Дополнительные |
24 |
1,45 |
0,97 |
| 25 |
1,15 |
0,77 |
||
| Разгонные |
26 |
0,87 |
0,58 |
|
| 27 |
0,62 |
0,41 |
||
| 28 |
0,39 |
0,26 |
||
| 29 |
0,18 |
0,12 |
||
| 30 |
0 |
0 |
||
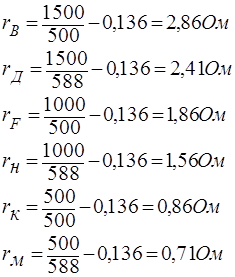
4. Построение сетки скоростных резисторных характеристик
Каждому полученному значению сопротивления и каждой схеме соединения тяговых двигателей соответствует своя характеристика. Задача данного этапа – построить все эти скоростные характеристики. Их будет столько, сколько позиций контроллера машиниста получилось в расчёте. Построение ведётся для значений сопротивлений, приходящихся на двигатель.
На исходной характеристике (например, ![]() для последовательной группировки двигателей) произвольно выбирают точки
для последовательной группировки двигателей) произвольно выбирают точки ![]() соответствующим токам
соответствующим токам ![]() .В четвёртом квадранте откладывают величины
.В четвёртом квадранте откладывают величины ![]() вычисление для этих токов по выражению:
вычисление для этих токов по выражению:
![]()
Величину ![]() находим в зависимости от вида соединения ТЭД.
находим в зависимости от вида соединения ТЭД.
результаты заносим в таблицу 4.1
Таблица 4.1
Значения Roэ для каждой группировки тяговых двигателей.
| Соединение |
|
|
|
|
| С |
2,36 |
1,12 |
0,86 |
0,71 |
| СП |
4,86 |
2,36 |
1,86 |
1,56 |
| П |
7,36 |
3,61 |
2,86 |
2,41 |
|
|
200 |
400 |
500 |
588 |
График скоростных характеристик строим на рисунке 4.1.
5. Построение пусковой диаграммы
На полученной сетке скоростных характеристик строится пусковая диаграмма. Пусковой диаграммой принято называть графическое изображение изменения тока двигателя и скорости движения в процессе пуска (переключения ступеней резисторов). Для построения пусковой диаграммы с выходом на высшую ходовую характеристику необходимо на сетку скоростных характеристик нанести ограничение тока по сцеплению, рассчитанное на этапе 3.2.1.
Пусковую диаграмму необходимо построить в области максимального и минимального значений пусковых токов, учитывая, что диаграмма изображает процесс резисторного пуска электровоза при условии перехода на следующую скоростную характеристику в момент достижения током двигателя значения минимального пускового тока.
6. Расчёт сопротивлений резисторов ослабления возбуждения
Принимаем 4 ступени ослабления возбуждения с коэффициентами регулирования ![]() . На последней ступени ослабления возбуждения в шунтирующей цепи остается только индуктивный шунт. Его сопротивление на основании закона Кирхгофа:
. На последней ступени ослабления возбуждения в шунтирующей цепи остается только индуктивный шунт. Его сопротивление на основании закона Кирхгофа:

![]()
Величина сопротивления обмотки возбуждения ориентировочно принимается равной: ![]() .
.
Сопротивление резисторов других ступеней:



Если шунтируется ОВ сразу двух ТЭД, то величина ![]() удваивается.
удваивается.
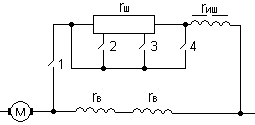
Рисунок 6.1 – Расчётная схема для двух тяговых двигателей.
Таблица 5
Замыкания контакторов ОВ и величины сопротивлений резисторов ОВ
| Ступень ОВ |
Контакторы |
|
|
|||
| 1 |
2 |
3 |
4 |
|||
| 1 |
+ |
0,244 |
0,122 |
|||
| 2 |
+ |
+ |
0,1 |
0,05 |
||
| 3 |
+ |
+ |
+ |
0,062 |
0,031 |
|
| 4 |
+ |
+ |
+ |
+ |
0,046 |
0,023 |
7. Разработка схемы силовых и вспомогательных цепей
Разрабатываемая схема силовых цепей электровоза должна обеспечивать:
- пуск и разгон;
- регулирование скорости;
- реверсирование;
- работу электровоза в аварийных режимах (при отказе тягового двигателя);
- защиту тяговых двигателей и электрического оборудования от недопустимых режимов.
В разрабатываемом курсовом проекте электровоза для выполнения выше указанных задач устанавливаем следующее оборудование и аппараты. возьмем за основу электровоз ВЛ10 и рассмотрим путь тока на первой позиции: токоприемник, помехоподавляющий контур, быстродействующий выключатель (БВ), дифференциальное реле, две группы пусковых резисторов с контакторами, две группы по три тяговых двигателя с реле перегрузки, контактами отключения ТЭД реверсорами, и шунтировкой поля, через дифференциальное реле и на землю.
Для нормальной работы электровоза установлены следующие аппараты и соединяющие их вспомогательные цепи: мотор- вентилятор – для обдува ТЭД и пусковых сопротивлений, мотор- компрессор для создания необходимого запаса воздуха, электрические печи. В цепь включения входят пусковые сопротивления, реле дифференциальной защиты, контакторы включения, В цепь мотор вентиляторов дополнительно входит аппарат (ПШ) для переключения скорости вращения.
8. Выбор схемы защиты тяговых двигателей и электрического оборудования
Расчёт токов уставки защитных аппаратов. В силовой цепи электровоза необходимо предусмотреть основные виды защиты, в том числе:
1) от коротких замыканий в силовой цепи;
2) от замыканий силовой цепи на землю;
3) от перегрузок;
4) от боксования;
5) от атмосферных перенапряжений;
6) от помех радиоприёму.
Разработанную систему защиты целесообразно свести в таблицу, в которой указать:
- наименование аварийного режима;
- аппарат защиты;
- контролируемый параметр;
- уставка защиты;
- результат действия защиты.
Рассчитать ток уставки защиты для реле перегрузки, и быстродействующего выключателя, исходя из максимального допустимого по условиям коммутации тока тягового двигателя, который принимается равным (1,6÷1,8) Iч .
Рассчитываем ток уставки реле перегрузки (РП) и быстродействующего выключателя (БВ):
Ток уставки БВ зависит от тока уставки РП и наибольшего числа параллельных ветвей тяговых двигателей.
Таблица 8.1 Системы защиты электрического оборудования
| Наименование аварийного режима |
Аппарат защиты |
Контролируемый параметр |
Уставка защиты |
Результат действия защиты |
| Атмосферные перенапряжения |
Рр 1 |
U |
12 кВ |
При срабатывании пробивается на землю. |
| Короткое замыкание |
БВ |
I |
2376 А |
Разрывает силовую цепь тяговых двигателей. |
| Замыкание на «землю» |
РДФ |
Небаланс I |
100 А |
Блок-контактами воздействует на отключение БВ |
| Перегрузка тяговых двигателей |
РП |
I |
792 А |
Загорается сигнальная лампа на пульте. В режиме ОВ отключает контактора ОВ. |
| Боксование |
РБ |
Небаланс U |
180 А |
Загорается сигнальная лампа на пульте. Отключаются контактора ОВ. Вводятся пусковые резисторы. |
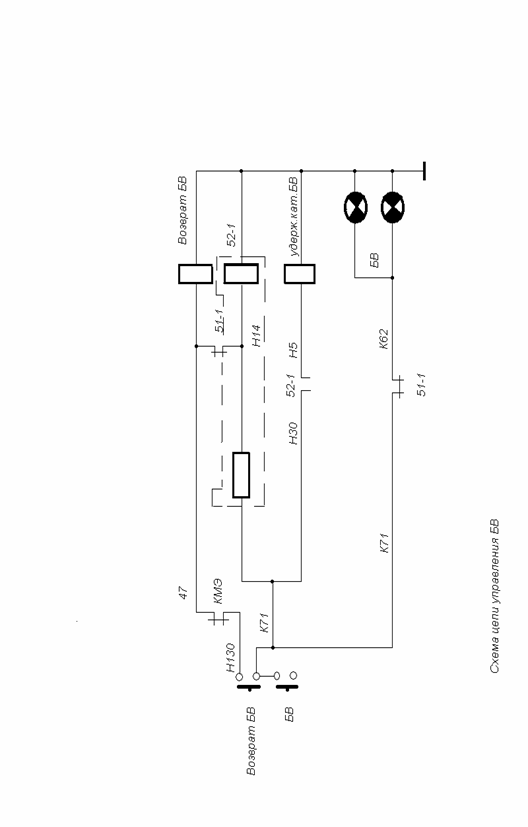
9. Разработка узла схемы цепей управления
В данном проекте рассматривается конструкция и назначение быстродействующего выключателя (БВ).
БВ предназначен для защиты силовой цепи тяговых электродвигателей в тяговом режиме от токов короткого замыкания. Срабатывание БВ приводит к отключению тяговых электродвигателей от контактной сети. При размыкании его силовых контактов изменяют положение и блокировочные контакты. Линейные контакторы выключаются, облегчая БВ рвать дугу, что особенно необходимо при неисправности его дугогасительного устройства, загораются сигнальные лампы, сигнализируя об отключении БВ, загораются сигнальные лампы “АВР”, сигнализируя о наличии аварийного режима в схеме, катушка счётчика отключений БВ соединяется с землёй, и счётчик фиксирует отключение БВ.
Работа схемы:
Аппарат управляется двумя кнопками “БВ” и “Возврат БВ”. При включении кнопки “БВ” создаётся цепь:
пр.К71– блокировка БВ 51-1 – лампы БВ – G(лампы горят).
пр.К71– блокировка диф. реле 52-1(разомкнута)
пр.К71– R=300 Ом – пр.Н14 – бл. 51-1 БВ – катушка “возврат БВ” – G(вентиль не срабатывает).
пр.К71 – кнопка “Возврат БВ”.
Для включения аппарата необходимо кратковременно включить кнопку “Возврат БВ” при этом создаётся цепь:
пр.К71– кн.”Возврат БВ” – пр.Н130(131) – замк. К. Э. на “0” позиции КМЭ – пр.47 и далее:
пр.47 – кат. “Возврат БВ”, вентиль сработал и дал доступ воздуха в цилиндр пневмопривода БВ.
пр.47 – бл.51-1 – пр.Н14 – кат. 52-1 – G. Диф. реле включилось и замкнулась бл. 52-1 в цепи пр. Н 30 – Н 5 и создается цепь:
Н 30 – бл. 52-1 – Н 5 – удерживающая катушка БВ.
Удерживающая катушка БВ, получив питание, создает магнитный поток, способный удержать якорь в притянутом состоянии. В данный момент якорь будет подведен к сердечнику штоком пневмопривода через рабочий рычаг, но силовые контакты еще не замкнуты. Сработает блокировочное устройство и разомкнутся блокировки:
пр. 47 – Н 14 (в результате в цепь катушки диф. реле вводится R = 300 Ом для увеличения чувствительности к отключению).
К 71 – К 62 (гаснут лампы БВ).
Замкнется блокировка в цепи питания ЛК.
Для замыкания силовых контактов необходимо отпустить кнопку “Возврат БВ”: обесточивается пр. 47, вентиль пневмопривовода БВ сообщает пневмоцилиндр с атмосферой и за счет отключающих пружин произойдет поворот рычагов до замыкания соловых контактов.
10. Выбор основного электрического оборудования
Если какой-либо аппарат, выпускаемый промышленностью, годен для применения в разрабатываемой схеме по своим номинальным данным и по количеству контактов, то в таблице оборудования указываем тип этого аппарата. В противном случае в графе «тип аппарата» ставим прочерк. Тип аппаратов выбираем по /4/.
Выбираем БВ по току уставки, равному 2376 А. Этому значению соответствует БВ типа БВП-5 с пределами регулирования тока уставки от 2000 А до 3350 А и номинальным током 1800 А. Ток токоприёмника выбирается из расчёта того, что ток БВ протекает по одному токоприёмнику (второй резервный) и равен току БВ, что есть 1800 А, этому значению соответствует токоприёмник типа 9РР с номинальным током 2100 А.
Тяговые двигатели на заданный номинальный часовой ток не выпускаются промышленностью. Для данной схемы по количеству контакторов и позиций групповые переключатели выбрать невозможно. Реверсор выбираем для тока 440 А и числа контакторов – 6, этому соответствует реверсор типа РК8 с номинальным током 500 А. Отключатель двигателей выбираем стандартного типа ПКД-043-02 с номинальным током 500 А. Реле дифференциальной защиты выбираем стандартного типа РД3-068 с током уставки (небаланса) 100 А. Датчик боксования выбираем стандартного типа ДБ-018. Реле перегрузки выбираем стандартного типа РТ-502 с током уставки 792 А.
| Обозначения на схеме |
наименование оборудования |
номинальные данные |
количество |
тип аппарата |
|
| напряжение |
ток |
||||
| Ткп |
токоприемник |
3000 |
2100 |
2 |
9РР |
| БВ |
быстродействующий выключатель |
3000 |
2376 |
1 |
БВП5 |
| ТЭД1-6 |
тяговые двигатели |
1500 |
440 |
6 |
–- |
| ПКГ |
групповой переключатель |
3000 |
440 |
1 |
–- |
| ПКД |
отключатель двигателей |
3000 |
500 |
3 |
ПКД-043-02 |
| ПКР, ПКС |
реверсор режимный |
3000 |
500 |
1 |
РК8 |
| РБ |
реле боксования |
3000 |
3 |
ДБ-018 |
|
| РП |
реле перегрузки |
3000 |
792 |
3 |
РТ-502 |
| РДФ |
дифференциальное реле |
3000 |
100 |
2 |
РДЗ-068 |
Список литературы
1. Усов В.А Системы управления электрического подвижного состава. Методическое пособие. Екатеринбург, 1994.
2. Ротанов Н.А, Захарченко Д.Д., Плакс А.В., Некрасов В.И., Иньков Ю.М. Проектирование систем управления электроподвижным составом. М.:Транспорт, 1986.
3. Тихменёв Б.Н., Трахтман Л.М. Подвижной состав электрических железных дорог. М.:Транспорт,1980.
4. Тищенко А.И. Справочник по электроподвижному составу, тепловозам и дизель поездам, Т.II.М.:Транспорт,1976.