| Похожие рефераты | Скачать .docx |
Дипломная работа: Електропоїзди постійного струму
Вступ
Електропоїзди постійного струму призначені для перевезення пасажирів на лініях приміського руху, електрифікованих на постійному струмі з номінальною напругою 3000 В.
В 1926г. в СРСР було відкрито рух потягів на електричній тязі. В 1929г. почався рух електропоїздів на приміській ділянці Москва – Митіщи протяжністю 18 кілометрів з напругою в контактній сіті 1500В. Подальша електрифікація приміських зон Москви, Санкт-Петербурга, Києва і інших міст у той час проводилася також на постійному струмі напругою 1500В.
Перші мотор-вагонні секції випускав Митіщинській машинобудівний завод. Вони складалися з моторного вагона і двох причіпних, які одночасно були і головними вагонами. У міру збільшення населеності з двох-трьох таких секцій стали формувати мотор-вагонні потяги. Спочатку все електроустаткування поставляла англійська фірма «Віккерс», і секції позначалися індексом ![]() («С» – Північні залізниці, «в» – електроустаткування фірми «Віккерс»); з надходженням електроустаткування вітчизняного заводу «Динамо» секції стали позначати
(«С» – Північні залізниці, «в» – електроустаткування фірми «Віккерс»); з надходженням електроустаткування вітчизняного заводу «Динамо» секції стали позначати ![]() . В довоєнні роки випустили 260 таких секцій.
. В довоєнні роки випустили 260 таких секцій.
Зовнішньо електросекції були схожі на електропоїзди, що експлуатуються в даний час: те ж планування пасажирських приміщення, тамбурів, вхідних дверей. Хоча, наприклад, вид головної частини вагона не був обтічним і не мав відповідної комфортності: поряд із вікном кабіни машиніста знаходилися двері з перехідним майданчиком, оскільки електросекції передбачалося скріпляти між собою. На вагонах першого випуску листи обшивки кузова кріпилися заклепками, а з номера 056 кузова стали робити зварними (гладкими, без гофрів). Дахи вагонів спочатку виготовляли дерев'яними, покривали їх брезентом, забарвленим в сірий колір. Потім стали виготовляти суцільнометалеві конструкції.
Візки конструктивно були виконані з опорно-осьовим підвішуванням тягових двигунів, які однією стороною кріпилися до балки візка, іншою – через підшипники спиралися на вісь колісної пари. Тягові двигуни знаходилися в набагато більш важких умовах, жорстко сприймаючи всі удари від нерівностей шляхів.
Силова схема електропоїздів практично не змінилася і продовжує працювати до теперішнього часу на електропоїздах ЕР2: ті ж два з'єднання тягових двигунів з ослабінням збудження на кожному з них, аналогічний вивід пускових резисторів. Схема, що прослужила багато років, виявилася надійною, працездатною і економічною. Силову схему захищали плавка вставка і два лінійні контактори, які автоматично відключалися при коротких замиканнях і перевантаженнях. Потім встановили три лінійні контактори, а згодом – чотири (Швидкодійні вимикачі не встановлювали, вони з'явилися пізніше на електропоїздах ЭР1).
Оскільки перші ділянки, електрифіковані на постійному струмі напругою 1500В, в післявоєнні роки стали переводити на напругу 3000В, Ризький вагонобудівний завод (РВЗ) став випускати «перехідні» електросекції, багато в чому схожі на ![]() , для роботи на двох напругах. У міру введення нових ділянок їх передавали на відповідні дороги. Електросекції, випущені в Ризі, позначалися «
, для роботи на двох напругах. У міру введення нових ділянок їх передавали на відповідні дороги. Електросекції, випущені в Ризі, позначалися «![]() », їх номери за період з 1946 – 1952гг.: 501…781, 882…908, 1009…1043, 1144…1159. З 1952г. по 1958г. РВЗ випускав секції
», їх номери за період з 1946 – 1952гг.: 501…781, 882…908, 1009…1043, 1144…1159. З 1952г. по 1958г. РВЗ випускав секції ![]() №1160…1781 для роботи тільки при напрузі 3кВ.
№1160…1781 для роботи тільки при напрузі 3кВ.
В 1957 – 1958гг. почався серійний випуск 10-вагонних електропоїздів ЭР1. До 1962г. було побудовано 259 таких потягів. З 1962г. аж до середини 80-х років з перервою випускали потяги ЭР2 №300…700, 900...1349.
Протягом багаторічної експлуатації потягу мотор-вагонна тяга зазнала великі зміни: склади стали формувати не з трьохвагонних секцій, а з двохвагонних, допоміжні машини, акумуляторні батареї, головні резервуари перенесли на причіпний вагон (раніше все це встановлювалося на моторному вагоні). Змінилися також конструкція візків і підвіска тягових двигунів, зросла їх потужність, на моторних вагонах встановили швидкодійні вимикачі і прибрали другий (резервний) струмоприймач. Лобова частина головного вагона набула сучасний вигляд з повним переплануванням кабіни машиніста, вхідні двері стали автоматичними з низькими підніжками та ін.
Одночасно учені і фахівці вели роботи із створення потягу з електричним гальмуванням. Перші практичні досліди були проведені в 1947г. на переобладнаній секції ![]() №213. Потім п'ять секцій
№213. Потім п'ять секцій ![]() в двохвагонному варіанті було перероблено на Перовському локомотиворемонтному заводі для рекуперативно-реостатного гальмування. У складі 10-вагонного потягу (№ секцій 002, 019, 020, 022, 030) їх передали в 1958г. в депо Перерва Московської дороги для опитної експлуатації.
в двохвагонному варіанті було перероблено на Перовському локомотиворемонтному заводі для рекуперативно-реостатного гальмування. У складі 10-вагонного потягу (№ секцій 002, 019, 020, 022, 030) їх передали в 1958г. в депо Перерва Московської дороги для опитної експлуатації.
Треба сказати, що цей потяг важко входив в життя. У той час була відсутня електронна система автоматичного управління і захисту. Релейний захист через повільну дію не відповідав вимогам, тому часто виходили з ладу тягові двигуни, силова апаратура та ін. Проте нагромаджувався досвід експлуатації, і в результаті на РВЗ на початку 60-х років випустили один потяг ЕР6 і два потяги ЕР10. На них згодом удосконалювали систему реостатно-рекуперативного гальмування. Пізніше було виготовлено 66 потягів ЕР22, які задовільно пропрацювали близько 30 років, по два потяги ЕР22М і ЕР22В, на основі яких створили сучасні потяги ЕР2Р, ЕР2Т, ЕД2Т, ЕД4, ЕД4М.
Перераховані електропоїзди володіють рядом достоїнств. Так, підвищена потужність тягових двигунів допускає достатньо великі прискорення потягу, застосування в схемах електронних пристроїв істотно підвищило надійність електроустаткування і усунуло ряд недоліків, характерних для раніше випущених складів. На потягах досягнута значна економія гальмівних колодок, вони менше забруднюють навколишнє середовище. Схема прямого входу в рекуперацію стала більш простою, вона дозволяє підвищити якість електроенергії, що повертається. При використовуванні всіх гальмівних засобів потягу досягається дуже високий гальмівний ефект, добре продумана система резервування устаткування.
Після появи надійних силових приладів (діодів) РВЗ в 1962г. приступив до випуску електропоїздів змінного струму. Вони отримали позначення ЕР9. З 1967р. завод став випускати електропоїзди ЕР9П з підвагонним розташуванням випрямної установки. В 1978г. на моторних вагонах встановили шинний високовольтний ввід, розташований усередині пасажирського приміщення, замість раніше вживаного зовнішнього кабельного високовольтного вводу. Ці потяги стали позначати ЭР9М. Після модернізації жвавого складу, упровадження випрямної установки з природним охолоджуванням і реостатного гальма на РВЗ стали будувати потяги ЕР9Є і ЕР9Т. В даний час в Росії проводяться потяги з реостатним гальмуванням ЕР9Т.
Використовування напівпровідникової техніки дозволило удосконалити системи електричної тяги і гальмування електропоїздів. Були побудовані опитні електропоїзди ЕР2И і ЕР12 з тиристорно-імпульсним управлінням режимами пуску і гальмування, був створений електропоїзд ЕР200, конструкційна швидкість якого 200 км/ч.
Вагони електропоїздів складаються з механічної частини, пневматичного і електричного устаткування. До механічної частини відносяться кузов, ходова частина, зубчаті передачі, тягові прилади. До пневматичного устаткування слід віднести прилади гальмівної системи і пневматичні апарати, повітропроводи, резервуари, крани, звукові сигнали, склоочисники та ін., до електричного –струмоприймачі, пускову апаратуру (силову і низьковольтну), тягові двигуни, допоміжні машини, апарати захисту.
Составність секції або потягу визначає число і взаємне розташування моторних і причіпних вагонів секції (потяги). Составність виражають формулою, де буквами М, П і Г позначають відповідно моторний, причіпний і головний вагони.
Нумерація вагонів складається з номера електропоїзда і номера вагона (дві останні цифри). Моторні вагони мають парні номери – 02, 04, 06 і т.д., головні позначають 01 і 09, причіпні мають закінчення 03,05,07, 11.
Спочатку електропоїзди експлуатувалися на малих плечах (40…70 км). Потім намітилася тенденція до збільшення довжин ділянок, особливо під час літніх перевезень при браку пасажирських вагонів. Електропоїзди стали використовуватися на перегонах в сотні кілометрів. Проте конструкція мотор-вагонного рухомого складу на подібну роботу не розрахована і подовження ділянок до 150км і більш небажано. Унаслідок коротких перегонів і великої інтенсивності руху в приміських зонах мотор-вагонний рухомий склад повинен забезпечувати великі прискорення і уповільнення, а також максимальні швидкості для реалізації високих дільничих швидкостей на малих перегонах.
1. Загальні відомості про електропоїзд постійного струму ЕР2
1.1 Формування електропоїздів та їх основні технічні характеристики
За основну поїзну одиницю електропоїзду ЕР2 прийнятий 10-вагонний електропоїзд ,складений з двох головних ,п’яти моторних та трьох причіпних вагонів. У експлуатації ці поїзди можуть формуватися з 4,6,8,10 та 12 вагонів.
Для забезпечення умов автономності поїзду число вагонів в ньому повинно бути не менш чотирьох ,з них два вагона –головні. Найбільше число вагонів , обираємо по умовам навантаження коло керування та довжиною пасажирських платформ. В будь-якому варіанті електропоїзд містить два головних вагонів, а кількість моторних дорівнює половині загального числа вагонів.
Розрізняють механічне, електричне та пневматичне обладнання вагону. До механічного обладнання відносяться кузов, ходові частини , редуктор та тягово-зчіпне обладнання ; до електричного – струмоприймач, пускорегулюючі апарати ; до пневматичного – апарати та прилади гальмівної системи, обладнання подачі звукових сигналів , склоочисник, резервуар, крани та такі інші.
У вагонах передбачені тамбури , зовнішні двері ,які закриваються та відкриваються по засобу електропневматичному приводу .
Кабіни керування передбачені тільки у головних вагонах електропоїзду. Для входу у кабіну керування мають службовий тамбур.
Електропоїзда обслуговують лінії приміських перевезень, характеризуючи короткими перегонами й високій інтенсивністю руху ,тому вони повинні мати високі прискорення та сповільнення для реалізації високих швидкостей на усіх ділянках обертання.
Основні технічні дані 10-и вагонного електропоїзду ЕР2:
Маса , т :
- поїзда 467,9
- моторного вагону 54,6
- головного вагону 40,9
- причіпного вагону 38,3
Конструктивна швидкість, км/г 130
Потужність годинного режиму, кВт :
- загальна 4000
- моторного вагону 800 Струм годинного режиму, А :
- загальний 1460
- моторного вагону 292
Швидкість руху при годинному режимі
та повному збуджені, км/г 52,0
Швидкість руху при тривалому режимі
та послабленому збуджені, км/г 82,5
Прискорення поїзду з пасажирами на
прямій горизонтальній ділянці шляху, м/с^2 0,6
То же сповільнення, м/с^2 0,8
Розміри кузова вагону, мм :
- довжина 19600
- ширина(по гофрам) 3522
- висота власна 3146
- висота від головки рельси 4253
Висота вагона від головки рельси, мм:
- при опущеному струмоприймачі 5486
- при піднятому струмоприймачі 6986
База вагону, мм 13300
Кількість місць для сидіння взагалі: 1037
- моторному 110
- причіпному 107
- головному 83
Передаточне число 3,17
Кількість тягових двигунів поїзду 20
База візка вагону, мм:
- моторного 2600
- причіпного 2400
Вага візка вагону, т
- моторного 14,7
- причіпного 7,0
Діаметр колеса вагона по кругу катання, мм:
- моторного 1050
- причіпного 950
- головного 950
Довжина потягу по осях автозчеплення, мм 201810
Висота автозчеплення від рівня головки рейки
на головному вагоні, мм 1070
1.2 Умови експлуатації електропоїзду ЕР2
Приміський рух має ряд специфічних особливостей. Потік приміських сотнями тисяч чоловік у добу. На ділянках з особливо інтенсивним рухом у обігу щодня знаходиться 150 – 200 пар електропоїздів. Для приміського сполучення характерна невелика дальність поїзда і різка зміна кількості пасажирів по годинам доби і дням тижня. У вихідні і святкові дні пасажиропотоки істотно змінюються, кількість пасажирів у великих містах і промислових центрах обчислюється десятками тисяч.
Із-за зменшення потоку пасажирів у міру видалення від міста рух приміських поїздів організовано по зонному принципу. У найближчій від міста зоні число поїздів максимальне, а на більш віддалених зонах воно зменшується. Для великих центрів відстань між зупиночними пунктами складає 2 - 3 км, а у головній зоні воно зменшується до 1 – 2 км. Часті зупинки при великій густоті руху жадають від рухомого поїзда реалізації можливо великих прискорень і уповільнень.
Особливості приміського руху обумовлюють технічні характеристики електропоїздів. Потужність їхніх тягових двигунів, що приходиться на одиницю ваги, вище, ніж у будь-якого локомотива. Потужність на одиницю ваги електропоїздів ЕР2, ЕР2Р, ЕР9 при середній вазі десятивагонного поїзда 550 тс складає близько 7,3 квт/тс, тоді як потужність пасажирського електровоза ЧС2 з нормальним поїздом вагою 1000 тс буде 4,2 квт/тс. Питома сила тяги електропоїздів у період розгону близько 70 кгс/тс, що забезпечує високе прискорення поїзда 0,6 – 0,7 м/с2. При такому прискоренні через 20 с після трогания поїзд набирає швидкість 43 – 48 км/год, що дуже важливо при великій кількості зупинок. У теж час високі швидкості руху на коротких перегонах викликають необхідність початку гальмування з великої швидкості. Тому режим ведення поїзда повинен ґрунтуватися на інших принципах, ніж при електровозній тязі.
На приміських лініях, електрифікація яких при існуючих обсягах перевезень не виправдує себе, застосовуються дизель – поїзда. По своїм технічним даним вони забезпечують досить високу технічну швидкість, що складає приблизно 80 % швидкості електропоїзда ЕР2.
1.3 Розташування електричного обладнання на електропоїзді ЕР2
На електропоїздах повинне забезпечуватись наступне: найбільш повне і максимальне використання площі кузовів вагонів для пасажирів, оптимальні умови освітлення, опалення і вентиляції. Основну частину електроустаткування розміщають у підвагонних камерах, підвішених до рам кузовів, на візках і на дахах кузовів. Тільки невелику частину апаратури розташовують у шафах, встановлених у тамбурах вагонів. Підвагонні камери електропоїздів являють собою зварну конструкцію з кришками, які знімаються, і мають подвійні ущільнення з губчатої гуми. Далі як приклади описане розташування електрообладнання на електропоїздах ЕР2.
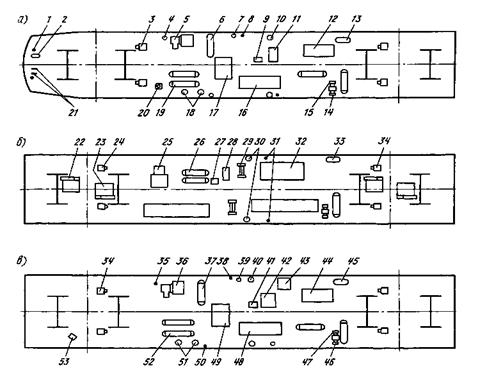
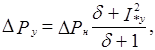
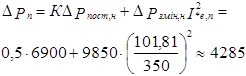
Рисунок 1.1 - Розташування обладнання під кузовом і в шафах головного(а), моторного (б), причіпного(в) вагонів
На рамі під кузовом головного вагона (рис 1.1, а) підвішені акумуляторна батарея 12, мотор-компресор 5, перетворювач (двухмашинний агрегат) 17, шафа 16 з контакторами допоміжних ланцюгів, електроповітрярозподілювач 14, повітрярозподільник 15, повітряні резервуари: два головних 19 по 170л кожен, трьох резервуарів 6 по 78 л, один зрівняльний 2 на 20 л і один допоміжний 13 на 12л, блок пускових резисторів 11 перетворювач. На рамах візків установлені гальмові циліндри 3, а під кузовом на рамі - фільтри 4 для очищення повітря, засмоктуваного компресором, два маслоотделітеля 18, обігрівач зливальної труби 20, два свистки 1, два тифона 21, сміттєзбиральник 9, з лівої і правої сторони - розетки 7 низьковольтний вхід, а також вакуумні патрубки 10 і парубки 8 водопостачання, використовувані при механізованому прибиранні вагона електропоїзда.
У кабіні машиніста змонтований пульт з апаратами керування, сигналізації і радіозв'язку, вимірювальними приладами. Частина з них розмішена на задній стінці кабіни. Пульт виконаний у виді окремих знімних блоків. У лівій його частині в місця помічника машиніста встановлений маховик ручного гальма (див. рис 1.1, а). У пульті передбачені відсіки для аптечки і технічної документації, під ним на підлоги перед кріслом машиніста встановлена педаль для впливу на клапан тифона і свистка. Така ж педаль мається і біля місця помічника. У правій частині кабіни на задній стінці розташований блок з вимикачами ланцюгів допоміжних апаратів.
У шафі № 1 розміщений електропневматичний клапан автостопа, кран подвійної тяги, вентиль заміщення електропневматичного гальмування пневматичним, два разобщітельних крани, фільтр, штепсельні роз′єми й ін. У шафі № 2 установлений блок з апаратурою керування потягом, вентиляцією й електропневматичним гальмуванням; у шафі № 3 - підсилювач і пристрій живлення, приемопередатчик і блок живлення з комплекту радіостанції, блоки живлення, керування і реєстрації з комплекту швидкостеміра, у шафі №4 - дешифратор і підсилювач з апаратури локомотивної сигналізації; у шафі № 5 - блоці апаратурою керування висвітленням, опаленням і вентиляцією; у шафі № 6 - блок з амперметром і вольтметром заряду батареї і регуляторами напруги і частоти перетворювача в шафі № 7 - блок з апаратурою керування і перемикачем кола заряду батареї, трансформатор кола керування зарядом батареї і живлення ланцюгів 110 В.
Поруч із шафою № 1 змонтований электрокалорифер для обігріву кабіни. Ліворуч від дверей кабіни знаходиться шафа для одягу, що відкривається з боку тамбура, а над ним - шафа для термосів і продуктів, що відкривається усередину кабіни. На каркасах шафи № 1 і шафи для одягу біля зовнішніх дверей установлені блоки з вимикачами дверей, кнопками звукової сигналізації і лампами сигналізації закритого положення двері; поруч розміщені пульти оповіщення системи ТОН. На даху вагона встановлені антена і резистор кола прожектора.
Під кузовом моторного вагона розміщене все електричне і пневматичне обладнання (рис 1.1), по два тягових двигуна 22, 23 і два гальмових циліндри 24, 34 на кожнім візку, шафа 32 (1ЯК.013) із силовими контакторами, шафа з контакторами опалення і реверсивно-гальмовим перемикачем, шафа з реостатним контролером, головним роз'єднувачем і повторювачем силових контакторів, автоматичний швидкодіючий вимикач 25, індуктивний шунт 28, блок 29 шунтуючих резисторів, блок резисторів ослаблення порушення, електричний повітряний розподільник, повітророзподільник, повітряні резервуари 26 по 78л і 33 на 12л, а також сміттєзбиральник 27. З лівої і правої сторони розташовані вакуумні патрубки 30 і патрубки 31 водопостачання, використовувані при механізованому прибиранні вагона.
У лобовій і торцевій шафах розташовані блоки з апаратурою для пуску допоміжного компресора, вимикачі, допоміжний компресор і маслоотделітель, з апаратурою керування гальмуванням, розмішені амперметри для виміру тягового струму і струму реостатного гальмування і вольтметр для виміру напруги тягових двигунів, амперметр для виміру струму тягових двигунів у режимі тяги і рекуперації, лічильник, шунти і додаткові резистори, колонка ручного гальма. На даху розташовані струмоприймач, два розрядники РМВУ-3.3, конденсаторний і індуктивний фільтри радіоперешкод і 16 блоків пуско-гальмівних резисторів. Розрядники і фільтри встановлені на загальній рамі, що кріплять до даху на амортизаторах; розрядники мають огородження, що у випадку їхнього руйнування не дозволяють розлетітися осколкам.
Дроти для з'єднання струмоприймачів при їхній рівнобіжній роботі прокладені в трубі уздовж даху; перемичку міжвагонного з'єднання, що забезпечує рівнобіжну роботу струмоприймачів, кріплять болтами до кронштейнів по кінцях даху. Дроти від пуско - гальмівних резисторів проходять по жолобі на горище. Сходи для підйому на дах розташована на лобовій стіні і мають електричне блокування безпеки.
Під кузовом причіпного вагона (рис.1.1, в) розміщена акумуляторна батарея 44, перетворювач 49, мотор-компресор 36, шафа 48 з контакторами високовольтних допоміжних ланцюгів, блок 42 демпферних резисторів, електричний повітряний розподільник 46, повітророзподільник 47, по два гальмових циліндра 34 на візку, два головні резервуари 52 по 170 л, три резервуара 37 по 78 л, резервуар 45 на 12 л, два відділювала мастила 51, обігрівач зливальної труби 53, сміттєзбиральник 41, фільтр 35 і шафа для колодок 43. З лівої і правої сторони розташовані розетки 38, 50 деповського живлення, вакуумні патрубки 40 і патрубки 39 водопостачання.
1.4 Силове електричне коло моторного вагону ЕР2
У режимі тяги це коло забезпечує реостатний пуск потяга, ослаблення збудження тягових двигунів, зміна напряму руху потяга переключенням (реверсуванням) обмоток збудження тягових двигунів. Опір пуско-гальмівних резисторів і резисторів ослаблення збудження в процесі розгону поїзда змінюють силовим реостатним контролером, що має 20 позицій.
Розгін поїзда до кожної ходової позиції (їх чотири) визначається відповідним положенням головної рукоятки контролера машиніста. Вал силового реостатного контролера повертається автоматично. Силові кола переводяться в тяговий чи гальмовий режим гальмовим перемикачем.
При установці головної рукоятки контролера машиніста в положення М (маневрове) вал реверсивного перемикача переводиться в положення, що відповідає положенню реверсивної рукоятки контролера машиніста. У результаті збирається коло з чотирьох послідовно з'єднаних тягових двигунів, у яку цілком уведені пуско-гальмівні резистори (12,83 Ом), при повному збудженні.
Якщо головну рукоятку контролера машиніста установити в положення П1, відбувається автоматичний пуск потяга під контролем системи керування СУРК і блоку електронних реле БЕР (тобто системи СУРК БЕР) до виходу на безреостатну ходову характеристику (до 14-й позиції). При цьому по черзі виводяться ступінями секції пуско-гальмівних резисторів контактами силових контакторів реостатного контролера.
Кола пуско-гальмівних резисторів забезпечують одержання 14 позицій реостатного пуску при використанні лише дев'яти силових контакторів реостатного контролера. Перехід з однієї позиції на іншу здійснює система СУРК БЕР, що дозволяє валу реостатного контролера повернутися на наступну позицію тільки тоді, коли струм тягових двигунів знизиться до струму уставки. Для забезпечення плавності пуску опору ступіней пуско-гальмівних резисторів підібрані так, що кидки струму при переході з позиції на позицію мінімальні. Після того як на 14-й позиції реостатного контролера всі пуско-гальмівні резистори виведені, автоматичний пуск закінчується. Першою ходовою є 14-я позиція при повному збудженні двигунів. При установці головної рукоятки контролера машиніста в положення П2 розгін поїзда відбувається, як і в положенні П1. Вал реостатного контролера не фіксується на 14-й позиції, і зі зменшенням струму до струму уставки система СУРК БЕР переводить його на 15-ю позицію. На цій позиції включаються контактори Ш и 10 реостатного контролера, у результаті чого паралельно обмоткам збудження тягових двигунів підключається шунтуюче коло резисторів (0,6865 Ом) і збудження послабляється до 59,5%. При повороті вала реостатного контролера на 16-ю позицію включається контактор 11, що шунтує резистор R10 і послабляє збудження двигунів до 41,5%. При установці головної рукоятки контролера машиніста в положення ПЗ вал реостатного контролера спочатку переходить на 17-ю позицію, шунтуючи контактором 12 резистор R11 і послабляючи збудження до 32,3%, а потім - на 18-ю позицію, де збудження послабляється до 26,5%. Контактор 13 шунтує резистор R12.
Коли головна рукоятка контролера машиніста встановлена в положення П4, вал реостатного контролера переходить на 19-ю позицію, шунтуючи контактором 14 резистор R13. Відбувається ослаблення збудження до 21,0%. Після того як струм двигунів знизиться до струму уставки, реостатний контролер перейде на 20-у позицію, на якій контактор 15 шунтує резистор R14 і послабляє збудження до 18,0%. На 20-й позиції може бути досягнута найбільша швидкість руху електропоїзда.
Силове коло у режимі електричного гальмування забезпечує: реостатне гальмування з незалежним збудженням тягових двигунів; рекуперативне гальмування, реостатне гальмування із самозбудженням тягових двигунів, спільна дія електропневматичних гальм усіх вагонів і реостатного гальмування моторних вагонів наприкінці гальмування і до повної зупинки; заміщення у випадку відмовлення електричного гальмування електропневматичним. Крім того, передбачені наступні переходи: з реостатного гальмування з незалежним збудженням на рекуперативне, з рекуперативного гальмування на реостатне із самозбудженням, з рекуперативного гальмування на реостатне з незалежним збудженням у випадку підвищення напруги в контактній мережі, з реостатного гальмування з незалежним збудженням на реостатне із самозбудженням.
При установці головної рукоятки контролера машиніста в 3 гальмове положення в силовому ланцюзі відбудуться наступні переключення: вал силового реостатного контролера повернеться на 1-ю позицію; вал гальмового перемикача перейде в положення гальмового режиму; включиться контактор ОВ, підключаючи обмотки збудження тягових двигунів до тиристорного перетворювача; включиться контактор KB, що подає напругу в систему САУТ і через трансформатор збудження Трз на тиристорний перетворювач; включаться контактори Т и ЛКТ, і система САУТ почне видавати керуючі імпульси на тиристори перетворювача. Коло почне працювати в режимі реостатного гальмування з незалежним збудженням. При цьому зросте струм збудження двигунів (генераторів), а внаслідок цього і їх електрорушійна сила.
Коли напруга якоря на тягових двигунах стає близьким до напруги в контактній мережі, спрацьовує реле включення рекуперації (РВР) електронного блоку і включає лінійний контактор ЛК У цей момент на реостатне гальмування з незалежним збудженням накладається короткочасно рекуперативне гальмування. Почати рекуперативне гальмування можливе тільки при напрузі в контактній мережі менш 3750 В.
Паралельно обмоткам збудження підключений шунтуюче коло: гальмовий контактор Т, резистори ослаблення збудження R24, R11, R12, R13, R14, R15, шунт амперметра А2. На 3-й позиції реостатного контролера контактор KB відключається. Надалі для підтримки гальмової сили реостатний контролер починає поступово виводити ступіні пуско-гальмівних резисторів під контролем СУРК БЕР Відключення електричного гальмування на низьких швидкостях здійснюється з попереднім зняттям ослаблення збудження тягових двигунів контактором Ш. Така послідовність переключень зменшує іскріння на колекторах тягових двигунів і полегшує умови роботи контакторів ЛК, Т и ЛКТ.
При установці рукоятки контролера машиніста в гальмове положення П5 електропневматичне гальмування починається на усіх вагонах потяга. На моторному вагоні воно накладається на електричне, що може привести до юза. Тому в тому випадку, коли тиск у гальмових циліндрах досягне уставки автоматичного вимикача гальмування (АВТ) кола електричного гальмування відключаються.
Після включення лінійного контактора ЛК відключається гальмовий контактор Т и залишається зібраним лише коло рекуперативного гальмування. Воно складається з кола струму збудження тягових двигунів і кола гальмового струму. Коли струм збудження досягне 250 А у системі автоматичного керування спрацює реле самозбудження РСВ і переведе силовий коло гальмового режиму з незалежним збудженням на реостатне гальмування із самозбудженням. При цьому відбувається короткочасно рекуперативно-реостатне гальмування. Після включення гальмового контактора Т відключається лінійний контактор ЛК.
Надалі при зменшенні гальмового струму в міру зниження швидкості СУРК видає команду на переключення силового реостатного контролера. При повороті його вала з 1-й позиції на 2-ю відсікається тиристорний перетворювач і відключається контактор ОВ. Контактор 16 реостатного контролера підключає обмотки збудження двигунів до обмоток якорів з постійним ослабленням збудження до 80%. На цьому завершується перехід на реостатне гальмування із самозбудженням.
Паралельно обмоткам збудження підключений шунтуюче коло: гальмовий контактор Т, резистори ослаблення збудженняR24, R11, R12, R13, R14, R15, шунт амперметра А2. На 3-й позиції реостатного контролера контактор KB відключається. Надалі для підтримки гальмової сили реостатний контролер починає поступово виводити ступіні пуско-гальмівних резисторів під контролем СУРК БЕР (у такій же послідовності, як і на першій ходовій позиції) до 14-й позиції. Наприкінці реостатного гальмування на 11-й позиції реостатного контролера починає діяти електропневматичне гальмування і разом з реостатним продовжується до повної зупинки. При відключенні гальмування на високих швидкостях силовий коло спочатку переключається з рекуперативного гальмування на реостатне, потім, знімається збудження тягових двигунів і після цього з витримкою часу розмикаються контакти контакторів Т и ЛКТ.
Якщо рукоятка контролера машиніста встановлена в гальмове положення П4, перехід на електричне гальмування відбувається аналогічно розглянутому. При установці рукоятки контролера машиніста в гальмове положення П5 електропневматичне гальмування починається на усіх вагонах потяга. На моторному вагоні воно накладається на електричне, що може привести до юза. Тому в тому випадку, коли тиск у гальмових циліндрах досягне уставки автоматичного вимикача гальмування (АВТ) кола електричного гальмування відключаються.
2. Тяговий електродвигун УРТ-110Б
2.1 Основні частини
На електропоїздах ЕР2 встановлені тягові двигуни УРТ-110Б; на ЕР2Р—1ДТ.003.4У1; на ЕР2Т—1ДТ.003.5У1,1ДТ.003.6У1 і 1ДТ.003.7У1; на ЕД2Т—1ДТ.003.8У1.
Основними частинами тягового двигуна (рис. 2.1) є остов 24, головні полюси (сердечники 75 і катушки 14), додаткові полюси (сердечники 21 і катушки 23), якір, щіткотримачі 41 з кронштейнами 43 і два підшипникові щити 8 і 26. Підшипникові щити встановлені в горловині торцевих сторін остову 24. В них запресовані зовнішні обойми роликових підшипників 6 і 29. Внутрішньо кільця підшипників напресовані на вал якоря 2. Для мастила підшипників в кришках 7 і 28 є трубки, закриті пробками. Радіально-упорний підшипник з боку колектора не дозволяє валу 2 переміщатися в подовжньому напрямі. Радіальний підшипник з боку вентилятора допускає осьове переміщення при температурних змінах довжини валу.
2.2 Остов
В остові двигуна укріплені головні і додаткові полюси, тобто магнітна система двигуна, підшипникові щити, які фіксують положення валу якоря, і щіткотримачі з кронштейнами. Остов служить не тільки несучою конструкцією машини, але і є магнітопроводом, по якому замикається робочий магнітний потік. Тому матеріал остову повинен володіти хорошими магнітними властивостями, які залежать від якості сталі.
Верхня частина остову міцно притягується до рами візка двома лапами 39, а нижня — двома болтами М36. З протилежної сторони остову (напроти осі колісної пари) є виступи, що оберігають двигун від падіння на шлях у разі порушення його підвіски.
З боку колектора остов має три оглядові люки (зверху, знизу і збоку), які закриті кришками з гумовими ущільнювачами, вгорі є вентиляційний люк для огорожі повітря. Тепле повітря викидається через отвори з боку вентилятора. Для кріплення кожного полюса в остові просвердлені по три отвори для болтів, є також отвори і для вивідних кабелів двигуна. Щоб оберегти їх від перетирання і пошкодження об кромки остову, а також запобігти попаданню вологи в двигун, встановлюють гумові втулки, які щільно охоплюють кабелі. До кабелів хомутами прикріплені захисні рукава.
2.3 Полюси
Головні полюси створюють основний робочий магнітний потік (в даних тягових двигунах їх чотири). Кожний полюс складається з сердечника, катушки і вивідних кабелів. Сердечники головних полюсів набирають з листів електротехнічної сталі завтовшки 2 мм, які спресовують в пакет і закріплюють заклепками. Усередині пакету уздовж полюса проходить стрижень, в отвори якого вкручують три болти, що кріплять полюс до остову. Ослабіння болтів не допускається, тому із зовнішньої сторони остову їх заливають масою компаунда, контролюючою самовідгортання болтів.
Катушки головних полюсів, виконані з шинної міді, намотують плашмя в два шари. Міжвітковою ізоляцією служить азбестовий папір, корпусною ізоляцією — п'ять шарів липкої склоескапонової стрічки і один шар каперної стрічки. З'єднання полюсів між катушок виконані з дроту ПМУ. Щоб в експлуатації не слабшало кріплення катушок, (ізоляція пересихає в процесі перегріву), катушки притискують до остову притискними фланцями.
Додаткові полюси створюють магнітний потік в комутаційній зоні для поліпшення комутації двигуна (зменшення іскріння). Встановлюють їх між головними полюсами. Обмотку додаткових полюсів сполучають з якірною обмоткою. Сердечники додаткових полюсів — литі, їх прикріплюють до остову трьома болтами. Між сердечником і остовом прокладені діамагнитні прокладки для зменшення розсіяння магнітного потоку.
Катушки додаткових полюсів намотують з шинної міді, їх ізоляція не відрізняється від ізоляції катушок головних полюсів. Після їх ізолювання для додання ним монолітності і створення кращого теплообміну катушки просочують в компаунді і покривають ізоляційним лаком. Щоб уникнути ослабіння кріплення катушок (так само як і на головних полюсах), застосовують пружинні фланці, що притискують катушки до остову.
2.4 Якір
Рухома частина тягового двигуна (якір) передає обертаючий момент двигуна на колісну пару моторного вагона, а також гальмівний момент під час рекуперативно-реостатного гальмування. Якір складається з сердечника, обмотки, колектора і валу. Його конструкція, як і його обмотка, в значній мірі визначають потужність електричної машини.
Всі частини якоря збирають на валу, який обертається в підшипниках, встановлених в підшипникових щитах. Сердечник якоря 18 є циліндром, зібраним з листів електротехнічної сталі, він зафіксований на валу обмоткотримачами 11 і 27. Колектор є найбільш складною і відповідальною конструкцією, його набирають з мідних пластин, ізольованих один від одного і від валу якоря міканітом колектора. Пластини затиснені вісьма болтами між нажимним конусом 9 і втулкою колектора 11, від яких вони ізольовані манжетою.
Вали якоря тягових двигунів випробовують значні зусилля обертаючих моментів і реакції зубчатої передачі. Часто змінне навантаження з миттєвими поштовхами під час пуску і гальмування, динамічне навантаження від нерівностей шляху створюють дуже важкі умови роботи валу. Тому його поверхню обробляють з високою точністю, переходи від одного діаметра до іншого роблять плавними, на валу не нарізують різьблення і прагнуть не проточувати канави шпон. Вали виготовляють з високоякісної хромонікєлєвої сталі 12ХНЗА, яка проходить термообробку для підвищення механічних властивостей.
Втулка якоря 1 напресовується на вал (без шпонки) зусиллям 600...1100кН. Вона несе на собі сердечник якоря з нажимными шайбами (обмоткотримачами), колектор і вентилятор. Втулка є трубою з буртом для упора колеса вентилятора. Обмоткотримач 27 відливають як одне ціле з вентилятором і насаджують на втулку до упора в бурт, втулку колектора замикають спеціальною гайкою. Між обмоткотримачем 27 і втулкою колектора 11 затиснений сердечник якоря, який разом з втулкою колектора і обмоткотримачем фіксується шпонками.
Сердечник якоря — частина магнітної системи двигуна, що обертається. Щоб зменшити втрати від вихрових струмів і перемагнічування, якір набирають з листів електротехнічної сталі завтовшки 0,5 мм Листи з обох боків покривають ізоляційним лаком. Через кожні 50 мм прокладають лист електрокартону. На зовнішній поверхні кожного листа штампують клиновидні вирізи, які при наборі листів в пакет утворюють пази. В них укладають обмотку якоря і закріплюють текстолітовими клинами. Для охолоджування якоря усередині листів сердечника роблять вентиляційні отвори діаметром 20...30 мм
Обмотка якоря двигуна УРТ-110Б — хвильова, двигуна 1ДТ.003 всіх модифікацій — петлева. При такій обмотці і збільшенні пластин колекторів значно зменшуються межламельна напруга і реактивна ЕДС, що підвищує комутаційну надійність двигуна. Міжвіткову ізоляцію обмоток виконують із склотканини, корпусну — із склослюдянитової стрічки, намотаної в шість шарів внапівперекришу, поверх якої намотують один шар склоленти.
З боку колектора кінці секцій укладають на обмоткотримач, вставляючи провідники в шліци пластин колекторів, і припаюють до пластин. До кожної пластини приєднують по два провідники. На лобових частинах обмотку закріплюють склобандажами, активні частини обмотки в пазах — текстолітовими клинами. Для підвищення електричної і механічної міцності якір просочують в лаку вакуумно-нагрівальним способом.
При обертанні колектора змінюється напрям струму в провідниках обмотки якоря при їх переході під головні полюси різній полярності. Колектор набирають з мідних клиновидних пластин, в шліци яких упаюють кінці якірних катушок. Нижня частина пластини має форму ластівчина хвоста, завдяки чому пластини затискаються між втулкою колектора 11 і нажимним конусом 9. Втулка колектора і нажимний конус стягуються вісьма болтами, що міцно утримує пластини. Для ізоляції пластин один від одного використовують міканіт колектора. Його зносостійкість вище за мідь, тому ізоляцію між пластинами продорожувають на глибину 0,8...1,5 мм
Умови роботи колектора дуже важкі, він піддається великим механічним і електричним навантаженням. За рахунок проходження великих струмів і тертя щіток на його поверхні виділяється багато тепла. Це, а також наявність відкритих, що знаходяться під високою напругою, деталей апарату (пластини, щітки, щіткотримачі)щіткового колектора, близько розташована «земля» (наприклад, остов двигуна або вал якоря), можливе іскріння під щітками викликають іонізацію повітря навкруги колектора. Подібне вимагає інтенсивної вентиляції.
2.5 Вентиляція двигуна
Неприпустимий нагрів двигуна приводить до втрат електроенергії і потужності, погіршує роботу електричної машини. На електропоїздах застосовується система самовентиляції тягових двигунів. Повітря засмоктується вентилятором двигуна через спеціальні жалюзі на даху вагона (окрім електропоїздів серії ЕД). Далі повітря проходить через очисні фільтри, відстійні камери і по вентиляційних каналах, гнучким патрубкам підводиться до двигуна. Через двигун він проходить двома потоками: один охолоджує зовнішні поверхні якоря і полюсів, другий потрапляє у вентиляційні канали сердечника якоря і охолоджує сердечник зсередини. Потім через канали в нажимній шайбі повітря поступає до лопаток вентилятора і викидається назовні через вентиляційні сітки.
На електропоїздах ЕД2Т потужність двигунів збільшена, що зажадало більш інтенсивного обдува, а традиційні вертикальні вентиляційні канали виявилися малі. Щоб їх збільшити, потрібно було б перепланувати пасажирське приміщення. Тому жалюзі для огорожі повітря встановили в нижній частині бічної стіни кузова.
2.6 Щіткотримачі і підшипникові щити
Щіткотримач є струмопровідним вузлом. Його встановлюють на ізольованому пластмасовому кронштейні, який кріпиться до внутрішньої торцевої стіни остову. Щіткотримач складається з корпусу з гніздами для щіток і нажимних пружинних пристроїв. Кронштейн виготовлений з пластмаси АГ-4В. В нього армовані сталеві втулки з різьбленням для кріплення двома болтами до остову. З'єднання кронштейна з корпусом щіткотримача виконано у вигляді рифленої гребінки для запобігання зсуву щіткотримача. Отвір під болт, що кріпить щіткотримач до кронштейна, має овальну форму, що дозволяє регулювати зазор між колектором і щіткотримачем.
Нажимний пристрій складається з нажимного пальця і пружини. Воно зібрано на осі, яку закріплюють шплінтом в отворі корпусу щіткотримача. Гвинтова пружина підтримує постійне натиснення на щітку у міру її зносу. У відтягнутому положенні нажимний палець фіксують, що полегшує зміну щіток. Щоб струм не проходив по сталевих пружинах щіткотримача, не нагрівав їх, щітки, встановлені у вікна, сполучають з корпусом мідними шунтами.
Підшипникові щити 8 і 26 закривають торцеву горловину остову. Діаметр посадочних поверхонь щитів строго відповідає діаметру посадочної поверхні горловини остову, щити щільно приганяють і укріплюють болтами. На підшипникових щитах є камери для мастила підшипників, кришки, що закривають ці камери, 7 і 28, ущільнюючі лабіринтові пристрої.
В двигунах застосовують однорядні підшипники з циліндровими роликами. Вони повинні витримувати великі динамічні навантаження. Зовнішні кільця встановлюють в кубла підшипникових щитів, внутрішні насаджують на вал в гарячому стані. Лабіринтові канави на щитах не дозволяють мастилу проникати всередину двигуна. Зовнішні кільця обох підшипників закриваються кришками. З боку колектора двигун не має виступаючого валу, тому кришку виготовляють глухій, лабіринтові ущільнення відсутні. Глуха кришка перешкоджає витіканню мастила.
Кришка 28 на протилежній стороні має отвір для виходу валу якоря. На її внутрішній поверхні проточені кільцеві канави (лабіринтові ущільнення). Для запресовки мастила в підшипники є патрубки, закриті пробками з різьбленням. Підшипники заповнюють консистентним мастилом ЖРО на 2/3 об'єму підшипникової камери.
До якості мастила пред'являють підвищені вимоги: не допускаються навіть сліди бруду, оскільки це може привести до зносу кілець, роликів і виходу їх з ладу. Через нестачу мастила в підшипниках виникає підвищений нагрів, міняється твердість металу деталей підшипника і наступає руйнування підшипника. Це звичайно приводить до заклинювання валу якоря після охолодження.
Надлишок мастила теж шкідливий, оскільки приводить до нагріву підшипника, розрідження мастила, видавлювання її через лабіринтові ущільнення і попадання на електричні частини двигуна.
Технічні дані тягових двигунів приведені в таблиці 2.1
Таблиця 2.1 – Технічні дані тягових двигунів
| УРТ-110Б | 1ДТ.003.4У1 | 1ДТ.003.5У1 | |
Номінальна Напруга, В |
1500 |
750 |
750 |
| Потужність, кВт | 200 | 225 | 235 |
| Струм, А | 146 | 330 | 345 |
Кількість полюсів головних добавочних |
4 4 |
4 4 |
4 4 |
| Збудження | Послідовне, 50% | Послідовне, 20% | Послідовне, 20% |
Частота обертання, об/хв |
1145 |
1290 |
1250 |
| Марка щіток | ЭГ-2А | ЭГ-2А або ЭГ-61А | ЭГ-2А або ЭГ-61А |
| Розміри щіток | 10 * 40 * 50 | 10 * 40 * 50 | 10 * 40 * 50 |
Натиснення нащітку в межах, Н ЭГ-2А ЭГ-61А |
18…22 18…22 |
22…24 25…27 |
22…24 25…27 |
3. Перевіряльний розрахунок потужності електродвигунів
Потужність двигуна повинна бути такою, щоб він працював за можливістю при температурі, близької до допустимої для застосованої в ньому ізоляції.
Характеризуючи потужність електродвигуна і електричної машини в цілому, необхідно розділяти такі категорії потужності: номінальну тривалу, короткочасну, миттєву перенавантажувальну або відключаючу.
У відповідності з вимогами нагріву двигунів виділяють три основні режими їх роботи: тривалий, повторно-короткочасний та короткочасний.
Тривалий режим. Робочий період настільки великий, що температура двигуна досягає свого усталеного значення, наприклад у двигунів тривало працюючих насосів, компресорів, вентиляторів і т. ін., в яких періоди роботи вимірюються годинами.
Повторно-короткочасний режим. За час роботи двигун не встигає нагрітися до усталеної температури, а за час паузи, коли він відключений від мережі, охолодитися до температури навколишнього середовища.
Короткочасний режим. За час роботи двигун не встигає нагрітися до усталеної температури, а за час паузи він охолоджується до температури навколишнього середовища.
Розрахунок будемо вести для повторно-короткочасного режиму роботи, який більше всього характеризує рух приміського залізничного транспорту, з його частими пусками та зупинками, за допомогою метода середніх втрат.
Для розрахунку потужності двигуна змоделюємо за допомогою ЕОМ рух електропоїзду у вигляді графіків навантаження для кожної з чотирьох позицій РК (рисунок 3.1 – 3.4), заданих у вигляді: ![]() .
.
Вихідні дані:
Рухомий склад .....................................................................................ЕР2
Напруга контактної мережі ...............................................................3300 В
Уставка РУС ............................................................375 А
Діаметр колеса .............................................................................1050 мм
Довжина та профіль ділянки .................................................3 км, 0/00
Середні втрати потужності в двигуні ![]() за час циклу виражаються рівнянням:
за час циклу виражаються рівнянням:
![]() (3.1)
(3.1)
де ![]() - середні втрати потужності в двигуні за час циклу роботи, кВт;
- середні втрати потужності в двигуні за час циклу роботи, кВт; ![]() ,
, ![]() - середні втрати потужності в двигуні за час пуску
- середні втрати потужності в двигуні за час пуску ![]() та гальмування
та гальмування ![]() , кВт;
, кВт;
![]() - втрати потужності в двигуні за час роботи
- втрати потужності в двигуні за час роботи ![]() з усталеною швидкістю, кВт.
з усталеною швидкістю, кВт.
Втрати потужності в двигуні за час роботи з усталеною частотою обертання ![]() визначаються з урахуванням к.к.д. двигуна:
визначаються з урахуванням к.к.д. двигуна:
![]() (3.2)
(3.2)
![]() (3.3)
(3.3)
![]() (3.4)
(3.4)
де ![]() - номінальні сталі втрати потужності в двигуні, кВт, які включають в себе потужність, витрачаєму на вентиляцію, тертя в підшипниках та щіток по колектору, гістерезис та вихрові струми в сталі;
- номінальні сталі втрати потужності в двигуні, кВт, які включають в себе потужність, витрачаєму на вентиляцію, тертя в підшипниках та щіток по колектору, гістерезис та вихрові струми в сталі;
![]() - номінальні змінні втрати потужності в двигуні, які включають в себе втрати в міді в обмотках якоря, враховуючи послідовні обмотки збудження у двигунів постійного струму,
- номінальні змінні втрати потужності в двигуні, які включають в себе втрати в міді в обмотках якоря, враховуючи послідовні обмотки збудження у двигунів постійного струму,
![]() - відношення постійних втрат в двигуні до змінних при номінальному навантаженні (для двигунів послідовного збудження
- відношення постійних втрат в двигуні до змінних при номінальному навантаженні (для двигунів послідовного збудження ![]() = 0,7).
= 0,7).
Втрати потужності при заданому навантаженні та частоті обертання, близької до номінальної, дорівнюють:
 (3.5)
(3.5)
де ![]() - середньоквадратичний струм в частках номінального за час роботи на усталеній швидкості.
- середньоквадратичний струм в частках номінального за час роботи на усталеній швидкості.
Середні втрати потужності при пуску ![]() та гальмуванні
та гальмуванні ![]() :
:
![]() (3.6)
(3.6)
![]() (3.7)
(3.7)
де ![]() ,
, ![]() - часткові значення еквівалентного струму при пуску та гальмуванні;
- часткові значення еквівалентного струму при пуску та гальмуванні;
![]() - коефіцієнт, враховуючий середні сталі втрати потужності в процесі пуску або гальмування в частках
- коефіцієнт, враховуючий середні сталі втрати потужності в процесі пуску або гальмування в частках ![]() (для двигунів послідовного збудження
(для двигунів послідовного збудження ![]() = 0,5).
= 0,5).
Використовуючи формули (3.1) – (3.7) розрахуємо середні втрати потужності, Вт, для 1-ї позиції РК:
![]() ;
;
![]() ;
;
![]()

Бачимо, що середні втрати потужності ![]() на першій позиції РК не перевищують номінальних втрат потужності
на першій позиції РК не перевищують номінальних втрат потужності ![]() , тобто
, тобто ![]() = 5870 Вт <
= 5870 Вт < ![]() = 16800 Вт і двигун працює при температурі, що задовольняє допустимій для застосованої в ньому ізоляції.
= 16800 Вт і двигун працює при температурі, що задовольняє допустимій для застосованої в ньому ізоляції.
Також розрахуємо середні втрати потужності для 2-ї, 3-ї та 4-ї позицій РК:
2-га позиція ![]() = 10515 Вт, і
= 10515 Вт, і ![]() = 10515 Вт <
= 10515 Вт < ![]() = 16800 Вт;
= 16800 Вт;
3-тя позиція ![]() = 12615 Вт, і
= 12615 Вт, і ![]() = 12615 Вт <
= 12615 Вт < ![]() = 16800 Вт;
= 16800 Вт;
4-та позиція ![]() = 14860 Вт, і
= 14860 Вт, і ![]() = 14860 Вт <
= 14860 Вт < ![]() = 16800 Вт.
= 16800 Вт.
Таким чином, на всіх чотирьох позиціях РК двигуни обраного рухомого складу працюють, задовольняючи умовам нагріву.
4. Силові ланцюги моторного вагону електропоїзда ЭР2
4.1 Принцип дії
Схема забезпечує реостатний пуск двигунів, їх перемикання в процесі пуску з послідовного з'єднання на послідовно-паралельне. На кожному з них можна застосувати ослаблення збудження для збільшення швидкості потягу.
Електрична апаратура моторного вагону передбачає реверсування тягових двигунів (зміна напряму обертання якорів). Реверсор — це пристрій, який змінює напрям проходження струму по обмоткам збудження.
Від коротких замикань схему тягових двигунів захищає швидкодійний вимикач БВ, доповнений диференціальним захистом (диференціальним реле ДР), від перевантажень і боксовання колісних пар — реле РП1, РП2 і РБ1, РБ2 (малюнок 4.1). Для захисту від атмосферних і комутаційних перенапружень служать розрядники РВР1 і РВР2. При опущеному струмоприймачі головним розєднувачем ГР заземляють силову схему на час оглядів і ремонтів. Лінійний здвоєний контактор ЛК1-2 здійснює оперативне включення і виключення ланцюга. Мостовий контактор М і контактори послідовно-паралельного з'єднання П1-2 перемикають двигуни з одного з'єднання на інше. Контактори Ш1 і Ш2 підключають шунтуючі ланцюги до обмоток збудження для збільшення швидкості руху.
Реле напруги РН з додатковим резистором Р32-РЗЗ під'єднується під напругу контактної сіті через високовольтний запобіжник ВП. Воно контролює підняте положення струмоприймача і наявність напруги в сіті. Через запобіжник ВП живиться також система опалювання (контактори МК1 і МК5), контактор МК2 подає високу напругу через міжвагонні з'єднання на причіпний вагон. Лічильник Сч з додатковим резистором R38-R39 фіксує витрачену електричну енергію. Фільтр ДрФ-ФК призначений для придушення радіоперешкод, неминучих під час роботи електропоїзда.
Реостатний контроллер РК є апаратом управління тяговими двигунами. Кулачковий вал РК має 18 позицій. Переходячи з позиції на позицію, реостатний контроллер зменшує опір пускових резисторів в ланцюзі тягових двигунів (див. таблицю замикання його контакторів на додатку). У контроллера є 12 силових кулачкових контакторів. Контактори 1...10 забезпечують реостатний пуск, 11 і 12 регулюють збудження двигунів.
На маневровому положенні реостатний контроллер кожного вагона нерухомий, його вал знаходиться в першій позиції. В ланцюг двигунів повністю введені пускові резистори R1...R5 і R10...R6. В положенні 1 реостатний контролер під контролем реле прискорення проходить вісім позицій і зупиняється в дев'ятій. При цьому з ланцюга тягових двигунів, сполучених послідовно, пускові резистори будуть виведені. Двигуни працюють на природній безреостатній характеристиці з повним збудженням.
При установці рукоятки в положення 2 кулачковий вал РК повертається в позицію 11, включаються контактори Ш1, Ш2, і до обмоток збудження під'єднуються шунтуючі ланцюги, через які починає протікати половина струму, який проходив раніше через обмотки збудження. Швидкість потягу збільшується.
Положення 3 рукоятки контроллера машиніста відповідає позиції 16 валу РК. Тягові двигуни при цьому сполучені послідовно-паралельно. В положенні 4 вал РК досягає своєї останній 18-й позиції. Двигуни працюють з ослабленим збудженням (як і на позиції 11).
4.2 Положення контролера машиніста
4.2.1 Маневрове положення
Якщо вимагається рухатися з якнайменшою швидкістю (наприклад, при маневрових пересуваннях), рукоятку контроллера машиніста короткочасно встановлюють в дане положення. При цьому включаються лінійні контактори ЛК1-2, мостовий контактор М. Вал РК знаходиться на першій позиції, його контактори 7, 8, 11, 12 замкнуті. Збирається ланцюг з чотирьох послідовно сполучених двигунів з повністю введеними пусковими резисторами (на рис. 4.1 вона показана жирною лінією із стрілками).
Ланцюг живлення двигунів: струмоприймач, індуктивний фільтр ФД, головний розєднувач ГР, перша катушка диференціального реле ДР, швидкодійний вимикач БВ, здвоєний лінійний контактор ЛК1-2, катушка реле перевантаження РП1, обмотки якорів Ml, М2, контакти реверсора В1 (якщо він знаходиться в положенні "Вперед"), обмотки збудження С1-С2, С2-С1, контакти реверсора ВЗ, контактор реостатного контроллера 7, резистори R1...R5, мостовий контактор М, резистори R10...R6, контактор реостатного контроллера 8, обмотки якорів МЗ, М4, контакти реверсора В5, обмотки збудження С1-С2, С2-С1, контакти реверсора В7, силова катушка реле прискорення РУ, шунт амперметра, друга катушка диференціального реле ДР, струмова обмотка лічильника, заземляючий пристрій ЗУ на осях колісних пар. Показаний зібраний замкнутий ланцюг тягових двигунів, якорі приходять в обертання з мінімальною швидкістю.
4.2.2 Перше ходове положення
В цьому положенні починає обертатися вал РК. Переходячи з позиції на позицію, він послідовно замикає свої контактори 1...10 і виводить пускові резистори. Так, на другій позиції включається контактор 1 і виводить резистор R1-R2, на третій позиції включається контактор 2 і закорочує резистор R6-R7 і т.д. На останній, дев'ятій, позиції замкнуться контактори 9 і 10 і повністю виведуть пускові резистори.
Нагадаємо, що при збільшенні частоти обертання якоря тягового двигуна струм знижується. Як тільки він досягне 175 А, реле прискорення дозволить валу РК обернутися в наступну позицію і вивести черговий резистор.
Не дивлячись на те, що при виводі резисторів кидки струму складають приблизно 175...210 А, це не викликає помітних поштовхів тягових зусиль, розгін потягу відбувається достатньо плавно.
4.2.3 Друге ходове положення
Для подальшого збільшення швидкості потягу рукоятку встановлюють в друге положення. При цьому вал РК переходить спочатку на позицію 10, а потім на позицію 11 і фіксується. Включаються контактори Ш1 і Ш2, які замикають ланцюги шунтування обмоток збудження. На позиції 10 збудження ослабляється на 33%. На позиції 11 резистори R11-R12 і R13-R14 закорочуються контакторами реостатного контроллера 11 і 12. Відбувається більш глибоке ослаблення збудження до 50%, що приводить до збільшення струму якорів, тягового зусилля і швидкості потягу.
4.2.4 Третє ходове положення
В цьому положенні тягові двигуни переєднуються з послідовного з'єднання на послідовно-паралельне, напруга на них підвищується в 2 рази. Частота обертання якоря, як відомо, залежить від прикладеної напруги. Вал РК повертається спочатку на позицію 12 і включає контактори П1 і П2. Вони під'єднують до кожної пари двигунів пускові резистори R5...R1 і R6...R10. При цьому через мостовий контактор М протікає струм двигунів: обмотки двигунів Ml, M2, контактор М, обмотки двигунів МЗ, М4, "земля". Стрічно йому протікає струм через пускові резистори: контактор Ш, резистори Р6...Р10, контактор М, резистори R5...R1, контактор П2, "земля". Теоретично ці струми приблизно рівні і складають близько 170 А.
В результаті тягові двигуни виявляються сполученими в дві паралельні групи: перша — реле перевантаження РП1, двигуни 1, 2, контактор РК9, резистори R5...R1, контактор П2, "земля"; друга — реле перевантаження РП2, контактор П1, резистори R5...R10, двигуни 3, 4, катушка РУ, "земля". Після виведення пускових резисторів і досягнення реостатним контроллером позиції 16 напруга на кожному двигуні стає рівною 1500 В, тобто в двічі більше, ніж при послідовному з'єднанні. На позиції 16 реостатний контроллер зафіксує. Помітимо, що вивід пускових резисторів в цьому випадку відбувається швидше, ніж при послідовному з'єднанні. На кожній позиції резистори виводяться не поодинці, а попарно з кожної групи двигунів. Необхідно відзначити також, що перехід на паралельне з'єднання відбувається при включених контакторах Ш1 і Ш2, які розмикаються на позиції 13.
4.2.5 Четверте ходове положення
В цьому положенні вал РК переходить спочатку в позицію 17, а потім — в позицію 18. Замикаються контактори Ш1 і Ш2, утворюється перший ступінь ослабіння збудження (33%). Потім за допомогою контакторів реостатного контроллера 11 і 12 досягається другий ступінь ослабіння збудження (до 50%). Дані процеси протікають так само, як і на послідовному з'єднанні в другому положенні головної рукоятки. На позиції 18 реостатного контроллера реалізується максимальна швидкість електропоїзда.
Якщо під час пуску короткочасно встановити головну рукоятку в положення 1 і повернути в положення М, то реостатні контроллери на всіх вагонах потягу зупиняться на тих позиціях, яких вони досягли у цей момент. Таким прийомом іноді користуються при розгоні потягу на брудних рейках, коли відбувається часте боксовання колісних пар.
При скиданні головної рукоятки на нуль відключаються лінійні контактори ЛК1-2, контактор М (або П1-2) і розбирається силова схема двигунів. При знеструмленому ланцюзі вал реостатного контроллера з будь-якої позиції автоматично доходить до останньої позиції 18 і встановлюється у вихідну позицію 1, підготувавши схему до наступного пуску.
4.3 Високовольтна схема допоміжних машин
Допоміжні машини розташовані на причіпних (головних) вагонах електропоїзда, система опалювання — на кожному вагоні. На моторному вагоні електричні печі ЕП пасажирського приміщення і калорифери ЭК1...ЭК3 одержують живлення через високовольтний запобіжник ВП, катушку реле перевантаження опалювання РПО і контактори МК1 і МК5. Для включення великої групи калориферів служить електромагнітний контактор МК1; печі і мала група калориферів включаються контактором МК5. До допоміжних ланцюгів також відноситься лічильник Сч з додатковим резистором R38 — R39 і реле напруги РН з додатковим резистором R32 — RЗЗ. Від кожного моторного вагона через високовольтні міжвагонні з'єднання запитуються допоміжні ланцюги сусіднього причіпного вагона. Напруга на високовольтні розетки РСБ подається контактором МК2. Через штепселі ШС причіпних вагонів живлення поступає на двигуни динамотора (дільника напруги) Д і компресора К, на печі ЭП і калорифери ЭК1...ЭК3.
На рисунку 4.2 приведена високовольтна схема головного вагона. Динамотор (дільник напруги) одержує живлення від контактора МК1 через реле перевантаження РПД, одна секція якого закорочена тепловим реле ТР1, і демпферний резистор R80-R81. Його незалежна низьковольтна обмотка збудження Н-НН, що створює основний робочий магнітний потік, живиться від ланцюга управління.
Від середньої точки дільника напруги С1 через демпфер Р82-Р84, контактор МК2, реле перевантаження РПК і теплове реле ТР2 одержує живлення двигун компресора.
Допоміжні машини захищені від перевантажень і коротких замикань за допомогою реле перевантажень РПД і РПК і контакторів МК1 і МК2. Проте реле РПД і РПК не захищають допоміжні машини від тривалих струмів перевантаження, що не перевищують уставок реле. Тому захист доповнений тепловими реле ТР1 і ТР2. Їх контакти при нагріванні розмикаються і вводять в роботу другі секції катушок реле РПД і РПК. Ці пристрої відновлюють натисненням кнопки "Возврат реле".
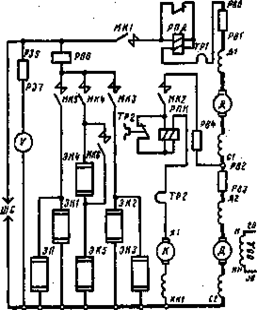
Рисунок 4.2 - Високовольтна схема допоміжних машин
5 . Тиристорний імпульсний перетворювач ТІП
5.1 Принципова схема ТІП
Плавне регулювання швидкості руху електропоїзда виконується тиристорним регулятором струму із широтно-імпульсною модуляцією. Прийнята частота регулювання 400 Гц виходить за межі використовуваних частот у системах автоблокування і частотної АЛСН.
Проектуванню тиристорного регулятора передували наукові дослідження, що показали, що проблема забезпечення широкого діапазону зміни коефіцієнта ослаблення порушення від 0,85 до 0,2 при широтно-імпульсній модуляції на підвищеній частоті 400 Гц зважується досить задовільно за допомогою комбінованого регулятора із загальним вузлом запирання тиристорів. З урахуванням результатів цих досліджень для електропоїзда ЕР2 розроблений спеціальний комбінований широтно-імпульсний регулятор збудження тягових двигунів. Регулятор є універсальним, тому що його використовують у схемі силових ланцюгів моторного вагона ЕР2 не тільки для регулювання збудження тягових двигунів, але і для міжступенчатого регулювання опору пуско-гальмівного реостата при пуску й електричному гальмуванні.
Універсальний тиристорний імпульсний перетворювач (ТІП) має головний тиристор VS1 (рисунок 5.1) допоміжний тиристор VS2 і комутуючі тиристори VS3 і VS4. При ослабленні збудження в режимі тяги тиристор VS1 включений послідовно з обмоткою збудження OВ тягового двигуна, що шунтується резистором Rш і дроселем Lш. Тиристор VS2 включений паралельно обмотці збудження OВ и тиристору VS1. Між катодами тиристорів VS1 і VS2 підключений ланцюжок, що складається з коммутирующих тиристорів VS3 і VS4, що по черзі забезпечують перезаряд комутуючого конденсатора Ск.
Розрізняють чотири стадії роботи перетворювача протягом одного періоду регулювання, рівного 2,5 мс (при частоті 400 Гц).
5.2 Стадії роботи ТІП протягом одного періоду регулювання
5.2.1 Перша стадія
Відмикаються тиристор VS1 і тиристор VS3. Перед цим тиристор VS2 був відкритий, а конденсатор Ск був заряджений полярністю, показаної на рис. 5.1 у дужках. Відмикання тиристорів VS1 і VS3 приводить до того, що до тиристора VS2 прикладається в зворотному напрямку напруга конденсатора Ск і тиристор VS2 запирається. Одночасно конденсатор Ск перезаряджається, тобто спочатку розряджається через Lш і Rш, а потім заряджається зворотною полярністю, що буде потрібно надалі для запирання тиристора VS1.
В залежності від схеми підключення тиристорів до обмоток збудження тягових двигунів тиристорні регулятори розділяють на послідовні, паралельні і комбіновані. У комбінованого регулятора тиристори підключені послідовно і паралельно до обмоток збудження.. Тривалість перехідних процесів на першій стадії регулювання, тобто комутаційного інтервалу tit забезпечуючого запирання тиристорів і перезаряд комутуючого конденсатора, дорівнює 0,2 — 0,25 мс і складає близько 0,1 періоду регулювання.
5.2.2 Друга стадія
Тиристор VS1 відкритий. Струм обмотки якоря протікає по обмотці збудження OВ и по шунтуючому ланцюжку Rш і Lш. Йде наростання струму ів. Тривалість другої стадії (t2) визначається часом відкритого стану тиристора VS1.
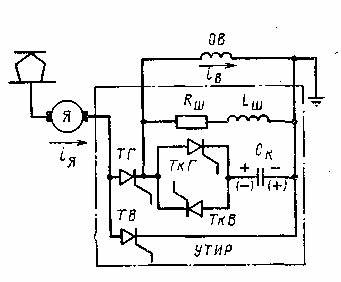
Рисунок 5.1 Принципова схема ТІП
5.2.3 Третя стадія
Відмикаються тиристори VS2 і VS4. Струм обмотки якоря переходить з тиристора VS1 на тиристор VS2. Тиристор VS1 защіпається, тому що до нього прикладається зворотна напруга на конденсаторі Ск. Одночасно відбувається перезаряд конденсатора Ск, що знову здобуває полярність, показану на рисункі 5.1.
Через те, що напрямок струму розряду коммутирующего конденсатора Ск на цій стадії збігається з напрямком струму порушення ів, останній трохи підвищується. Тривалість третьої стадії регулювання (t3) визначається, як і першої, часом перехідних процесів у ланцюзі конденсатора Ск.
5.2.4 Четверта стадія
Тиристор VS2 відкритий. Струм обмотки якоря протікає по ланцюзі цього тиристора, що шунтирует обмотку збудження 0В. Струм обмотки збудження ів замикається через Lш і Rш і тому інтенсивно зменшується. Напруга конденсатора Ск, отримане на попередній стадії, залишається незмінним, тому що комутуючі тиристори закриті. Тривалість четвертої стадії регулювання (t4)β визначається часом відкритого стану тиристораVS2.
У тяговому режимі коефіцієнт ослаблення порушення тягових двигунів β залежить від того, наскільки знижується струм на четвертій стадії регулювання, а також залежить від відносної тривалості відкритого стану чи регулятора коефіцієнта заповнення імпульсів γ=tи/T, що у розглянутому режимі виражає частку часу відкритого стану допоміжного тиристора протягом усього періоду регулювання:
γ= (t3 + t4 )/(t1 + t2+ t3 +t4 ) ( 5.1)
Збільшуючи час t1 і відповідно зменшуючи час t2 при Т — 2,5 мс, на моторному вагоні ЕР2 практично здійснюють ослабленим збудженням.
У режимі міжступінчатого регулювання опору пуско-гальмівного реостата, а також у режимі регулювання збудження тягових двигунів при електричному гальмуванні у визначається часом відкритого стану головних тиристорів.
Підтримка струму тягових двигунів на його середньому рівні, що відповідає току уставки (у межах між найбільшим і найменшим значеннями), виконують шляхом зміни коефіцієнта заповнення імпульсів у від найменшого значення (при малій швидкості електропоїзда) до найбільшого (при високій швидкості). Функцію автоматичної зміни внесе система автоматичного регулювання САР.
Поки коефіцієнт заповнення імпульсів у зберігається менш 0,5, САР видає імпульси керування на початку кожного періоду регулювання:
- на головні тиристори VS1 і комутуючі тиристори перезаряду VS3 (у режимі міжступінчатого імпульсного регулювання реостата при тязі й електричному гальмуванні й у режимі регулювання збудження двигунів при електричному гальмуванні);
- на допоміжні тиристори VS2 і комутуючі тиристори гасіння VS4 (у режимі регулювання збудження двигунів при тязі).
Імпульси керування на закривання тиристорів САР видає в ті моменти, коли струм двигунів перевищує уставку на 5% (контролюється найбільше значення струму двигунів іmax). Ці імпульси подаються:
- на допоміжні тиристори VS2 і комутуючі тиристори гасіння VS4 у режимі міжступінчатого регулювання реостата при пуску й електричному гальмуванні й у режимі регулювання збудження при електричному гальмуванні;
- на головні тиристори VS1 і комутуючі тиристори перезаряду VS3 у режимі регулювання збудження двигунів у тязі.
Зазначена послідовність роботи елементів регулятора передбачена лише на початку регулювання і не може зберігатися при коефіцієнті заповнення імпульсів у, що достигли значення 0,5 чи більш, тому що через зросле часу відкритого стану тиристорів при малому часі періоду (високій частоті регулювання) не виключений пропуск окремих періодів регулювання. Такий пропуск означав би небажаний перехід системи регулювання в релейно-частотний режим. Щоб уникнути цього, коли коефіцієнт заповнення імпульсів у досягає значення 0,5, передбачена зміна логічної структури керування (зміна структури), що полягає в тім, що на початку кожного періоду імпульси керування подаються на ті елементи системи, що їх одержували раніше, коли струм двигунів досягав ішах. А елементи системи, що одержували раніше імпульси керування на початку періоду регулювання, тепер, після зміни структури, одержують імпульси керування, коли струм двигунів досягне значення менше уставки на 5% (контролюється мінімальне значення струму двигунів іmin.
6 . Силова схема моторного вагону модернізованого електропотягу ЕР2
електропоїзд експлуатація моторний вагон
6.1 Загальна характеристика
В силовий ланцюг моторного вагона входять струмоприймач, пристрій захисту від радіоперешкод, розрядники, апарати захисту, тягові двигуни і ряд спеціальних апаратів. З їх допомогою здійснюється з'єднання пускогальмівних резисторів і тягових двигунів з контактною сіттю і рейками, змінюють напрям обертання якорів двигунів, регулюють струм збудження, виводять резистори, перемикають тягові двигуни з режиму тяги в режим електричного гальмування і назад.
Електрична схема електропоїзда забезпечує автоматичний пуск тягових двигунів при управлінні контроллером машиніста. вихід двигунів на природну безреостатну характеристику. перехід в гальмівний режим з автоматичною підтримкою гальмівного струму якорів тягових двигунів. Режим рекуперації діє з максимальної швидкості до швидкості 50...45 км/ч. Потім схема автоматично переходить на реостатне гальмування з самозбудженням тягових двигунів до швидкості 15... 10 км/ч. Після цього застосовують електропневматичне догальмування малим ступенем тиску в гальмівних циліндрах.
Тягові двигуни одержують живлення від контактної сіті через струмоприймачі ПК, Г-образний фільтр, що складається з дроселя ДрФ і конденсатора С1, знижуючого рівень радіоперешкод, створюваних під час роботи електропоїзда. Розрядники Рр1 і Рр2 захищають силову схему від атмосферних і комутаційних перенапружень. Перший з них, приєднаний до струмоприймача, сприймає основне навантаження, а другий, включений паралельно першому після фільтра, гасить залишкові перенапруження на конденсаторі С1 і полегшує роботу першого розрядника. Після проходження хвилі перенапруження апарати повертаються в початковий стан. Головний розєднувач ГР призначений для відключення силових ланцюгів тягових двигунів і високовольтних ланцюгів допоміжних машин від струмоприймача і їх заземлення під час огляду або ремонту. Крім того, в заземленому положенні ножа через резистори R22 опором 102 кОм розряджається конденсатор фільтра Cl.
Швидкодійний вимикач БВ служить для відключення ланцюгів тягових двигунів в аварійних ситуаціях і працює тільки в режимі тяги. В режимі рекуперації струм силового ланцюга має протилежний напрям, тому зростаючий струм розмагнічуючих витків БВ при короткому замиканні викличе зворотний ефект: відбудеться посилення магнітного потоку утримуючої катушки, і вимикач не спрацює.
Дві катушки диференціального реле ДР1 і ДР2, введені в силовий ланцюг послідовно з первинними обмотками диференціюючого трансформатора ТРД на початку і кінці схеми, підвищують чутливість спрацьовування БВ при значно менших струмах короткого замикання (так званих неповних коротких замиканнях).
Силові контактори ЛК, ЛКТ, Т і Ш служать для оперативного включення або відключення живлення тягових двигунів: через контактори ЛК і ЛКТ струм проходить в режимах тяги і рекуперації, через контактор Т — в режимі реостатного гальмування. Контактор Ш підключає шунтуючий ланцюг, що складається з індуктивного шунта ИШ і резисторів R10...R15, паралельно обмоткам збудження двигунів в тязі. В режимі реостатного гальмування з самозбудженням через контактор Ш замикається струм тягових двигунів.
Реверсор призначений для зміни напряму струму в обмотках збудження (для зміни напряму обертання якоря). В положенні "Вперед" замкнуті його силові контакти В1 і В2, в положенні "Назад" — HI і Н2. Гальмівний перемикач переводить схему тягових двигунів з режиму тяги в режим електричного гальмування. В положенні "Тяга" (або "Хід") замкнуті його парні контакти ТП2...ТП12 і ТП9, в положенні "Гальмо" замкнуті непарні контакти ТП1..ЛТП 1.
Діоди VD54...VD57 необхідні для пропускання струму в режимі рекуперативного гальмування. Діоди VD30...VD40 разом з тиристором VS9 і контактом гальмівного перемикача ТП9 утворюють шунтуючий ланцюг, який використовується короткочасно в моменти відключення тяги. Через неї замикаються струми самоіндукції, що виникають в обмотках збудження тягових двигунів. Завдяки цьому ланцюгу в моменти відключення тяги зменшуються комутаційні перенапруження на колекторах тягових двигунів і покращуються умови дугогашення лінійних контакторів ЛК і ЛКТ. Дільник напруги на резисторах R71, R73, стабілітрон ПП2 і конденсатор С15 створюють умови для відкриття тиристора VS9 хвилею перенапруження. Після закінчення перехідного процесу при відключенні тягових двигунів тиристор VS9 закривається і запобігає протіканню струмів що викликаються ЕДС самоіндукції.
Основним апаратом управління тяговими двигунами є реостатний контроллер РК. В процесі розгону потягу він зменшує опір пускових резисторів і збільшує ступінь ослабіння збудження двигунів. Кулачковий вал реостатного контроллера РК має 20 позицій (див. таблицю замикання його контакторів на додатку.). Перші 14 позицій є позиціями реостатного пуску, останні 6 позицій служать для зміни ступеня (коефіцієнта) збудження двигунів.
Реостатний контроллер має 17 силових кулачкових контакторів. Контактори 7... 9 забезпечують вивід резисторів R1 ...R9, контактори 10...15 виводять резистори шунтуючого ланцюга R10...R14. Контактори 16 і 17 потрібні для електричного гальмування: один з них сполучає якорі з обмотками збудження, другий закорочує індуктивний шунт при реостатному гальмуванні з самозбудженням. Вивід резисторів R10...R14 труднощів не представляє, вивід пускових резисторів R1...R9 детально показаний по кожній позиції на рис. 5.1...5.5.
Для захисту ланцюгів від можливих перенапружень тягових двигунів в режимі рекуперації передбачено герконове реле максимальної напруги Э5-РМН. При напрузі в контактній сіті 3950В воно спрацьовує і перемикає схему рекуперації на реостатне гальмування (при незалежному збудженні, що продовжується). Аналогічний пристрій — реле напруги Э6-РН — також контролює рівень напруги в контактній сіті. У разі зняття напруги або його неприпустимому зниженні реле відключає лінійні контактори (відключає тягу).
Для обліку витрати електроенергії в режимі тяги і рекуперації є лічильники Wh 1 і Wh2. Прилади електровимірювань і реле напруги приєднані через обмежуючі резистори R27...R29, R17, R61...R63.
Перерахуємо можливості існуючої електричної схеми:
- зміна напряму руху електропоїзда;
- автоматичний пуск тягових двигунів і режим електричного гальмування;
-дотормаживание електропневматичним гальмом всіх вагонів потягу від швидкості 15 км/ч до повної зупинки;
- включення електропневматичного гальмування на окремій секції у разі відмови електричного гальмування на моторному вагоні даної секції;
- змішане (комбіноване) рекуперативне або реостатне гальмування моторних вагонів з електропневматичним гальмуванням причіпних вагонів;
- електропневматичне гальмування на всіх вагонах (службове гальмування ЕПТ) після установки контроллера машиніста в гальмівне положення 5.
Схема забезпечує коливання струму при пуску не більш ± 15% від середнього значення струму, при переходах з одного режиму на інший кидок струму не перевищує 150А. Середній струм при гальмуванні з незалежним збудженням не повинен перевищувати 360А, а при самозбудженні — 480А. Крім того, можлива зміна уставки пускового струму, а також — гальмівного струму при гальмуванні з самозбудженням на всіх вагонах потягу.
В електричній схемі передбачені наступні види захистів;
- від коротких замикань і перевантажень тягових двигунів:
- від пробою на "землю" ланцюга тягових двигунів;
- від коротких замикань і перевантажень тягових двигунів в схемі
електричного гальмування;
- від атмосферних і комутаційних перенапружень;
- від зниження або зняття напруги в контактній сіті;
- від надмірного підвищення напруги сіті при рекуперації;
- від коротких замикань у високовольтних і низьковольтних допоміжних ланцюгах і ланцюгах управління;
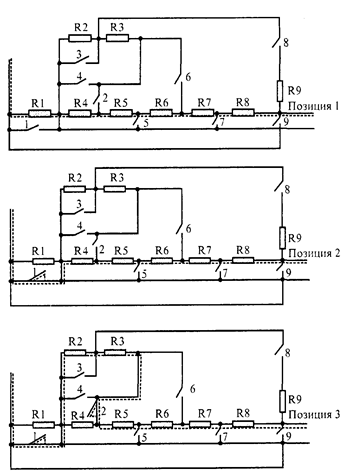
Рисунок 6.1 - Проходження струму по пуско-гальмівним резисторам на позиціях 1..3 реостатного контроллера
- від зворотних струмів в ланцюзі двигуна перетворювача;
- від перевантажень і від рознесення перетворювача;
- від підвищення і пониження напруги живлення ланцюгів 110 і 220В;
- від перевантажень трифазних асинхронних двигунів;
- від підвищення напруги на випрямному мосту VS1 ...VS6 статичного
збудника;
- від боксовання і юза колісних пар;
- від розносного боксовання колісних пар.
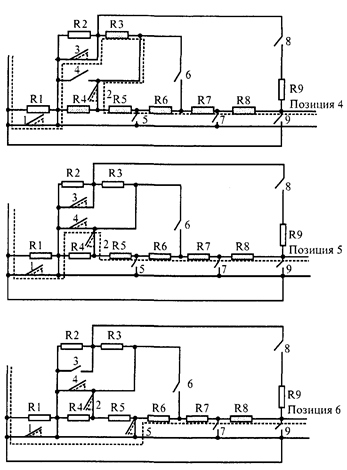
Рисунок 6.2 - Проходження струму на позиціях 4…6 РК
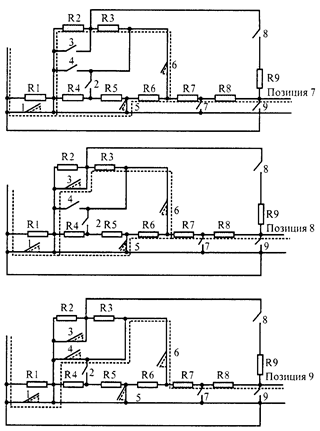
Рисунок 6.3 - Проходження струму на позиціях 7...9 РК
6.2 Силова схема в режимі тяги
Спрощена схема в режимі тяги приведена на рис. 6.6. Щоб зібрати замкнутий ланцюг через тягові двигуни, треба завчасно відновити швидкодійний вимикач, розвернути реверсор в необхідне положення (звичайно "Вперед"), розвернути гальмівний перемикач в положення "Тяга" (замкнути його парні контакти ТП2, ТП6 і т.д.) і включити лінійні контактори ЛК і ЛКТ. Перед збором схеми кулачковий вал реостатного контроллера повинен знаходитися у вихідній першій позиції, а гальмівна магістраль заряджена стислим повітрям.
Управляють роботою силової схеми за допомогою контроллера машиніста, на якому є одне маневрове і чотири ходових положення. Після установки головної рукоятки (штурвалу) контроллера в маневрове положення реверсор займає положення, відповідне положенню реверсивної рукоятки. Гальмівний перемикач повертається в положення тяги,включаються лінійні контактори ЛК і ЛКТ. Кулачковий вал РК залишається на першій позиції, всі пускові резистори введені в ланцюг тягових двигунів.
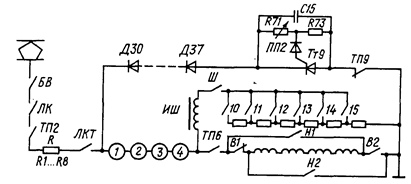
Рисунок 6.6 - Спрощена силова схема в режимі тяги
Живлення тягових двигунів здійснюється по ланцюгу - струмоприймач, індуктивній місткості фільтр ДрФ-С1, головний розєднувач ГР, швидкодійний вимикач БВ, катушка диференціального реле ДР1, обмотка трансформатора ТрД, лінійний контактор ЛК, контактор гальмівного перемикача ТП2, пускові резистори R1, R4...R8, контактор ЛКТ, обмотки якорів тягових двигунів М 1... М4, датчики струму якорів ДТЯ і ДТЯ1, контактор гальмівного перемикача ТП6, контактор реверсора В1, обмотки збудження двигунів Ml... М4, контактор реверсора В2, шунт амперметра A3, обмотка трансформатора ТрД, катушка диференціального реле ДР2, шунт амперметра Al. шунти лічильників Wh2 і Wh1. заземляюче пристрій ЗУ на осях колісних пар. Моторний вагон (потяг) приходить в рух з мінімальною швидкістю.
Після переводу рукоятки контроллера в положення 1…4 кулачковий вал РК під контролем реле прискорення (блоку БРУ) автоматично перемикається на відповідні позиції. Відповідність положень рукоятки (штурвалу) контроллера машиніста позиціям РК приведено в таблиці 6.1.
Таблиця 6.1 - Відповідність положень контролера машиніста і позицій реостатного контроллера
| Найменування показників | Положення рукоятки контролера | ||||
| М | 1 | 2 | 3 | 4 | |
| Позиція РК | 1 | 14 | 16 | 18 | 20 |
| Пусковий опір, Ом | 15,12 | 0 | 0 | 0 | 0 |
| Коефіцієнт ослаблення збудження % | 100 | 100 | 41,5 | 26,5 | 18 |
Після переводу штурвалу контроллера в положення 1 швидкість електропоїзда починає збільшуватися. При цьому кулачковий вал РК, переміщаючись з позиції на позицію під контролем блоку реле прискорення, виводить пускові резистори R1...R9 з ланцюга тягових двигунів. На позиції 14 реостатний контроллер автоматично фіксується, пускові резистори виведені повністю.
Величини пускових резисторів розраховані так, щоб при висновку ступенів опору кидки струму були б мінімальними, і забезпечувався плавний пуск. Крім того, при цьому застосована так звана вернєрна схема (термін "верньєр" означає "пристрій, що дозволяє плавно змінювати параметри електричного ланцюга"). Така схема виводу резисторів за рахунок їх послідовно-паралельного перезєднання дозволяє отримати більше число позицій при меншому числі контакторів РК і елементів резисторів.
Після установки штурвалу контроллера машиніста в положення 2 вал реостатного контроллера переходить на 15-у, а потім на 16-у позицію і зупиняється. При цьому включаються контактор Ш і контактор 10 реостатного контроллера. Створюється шунтуючий ланцюг, приєднаний паралельно обмоткам збудження: індуктивний шунт ІШ, контактор Ш, резистори R10...R15. Це приводить до збільшення якірного струму, тягового зусилля і швидкості електропоїзда. На позиції 16 включається контактор 11 реостатного контроллера, зменшуючи опір шунтуючого ланцюга.
Після переводу головної рукоятки контроллера в положення 3, а потім в положення 4 відбувається східчастий вивід резисторів кулачковими контакторами RK: R11, R12 - в положенні 3; R13, R14 - в положенні 4. Зниження опору шунтуючого ланцюга приводить до максимального ослабіння збудження тягових двигунів і переходу на відповідну швидкісну характеристику. Швидкість електропоїзда досягає найбільшого значення.
Відключення тяги в положеннях 2...4 протікає в два прийоми: контактор Ш відключається відразу, викликаючи посилення збудження двигунів і зниження якірного струму, потім з деякою затримкою (приблизно 1,2 с) відключаються лінійні контактори ЛК і ЛКТ. Такий алгоритм полегшує умови роботи апарату щіткового колектора і дугогашіння лінійних контакторів. Як указувалося вище, велику роль при цьому грає контур "нульових" діодів VD30...VD40.
6.3 Силова схема в режимі електричного гальмування
Кожного разу при відключенні тяги кулачковий вал гальмівного перемикача автоматично встановлюється в гальмівне положення. При цьому замикаються його непарні контактори, від'єднуються від якорів обмотки збудження тягових двигунів. Одночасно готуються гальмівні контури якірного струму і струму обмоток збудження. При установці контроллера машиніста в гальмівне положення 3 або 2 схема забезпечує рекуперативне гальмування з максимальної швидкості електропоїзда до швидкості 50...45 км/ч. Від контроллера машиніста включаються наступні контактори: лінійний ЛК, лінійно-гальмівний ЛКТ, Ш, контактор трансформатора збудження KB, контактор обмоток збудження 0В.
Струм збудження двигунів протікає по ланцюгу: "плюсовий" вивід керованого тиристорного моста VS1...VS6, контактор 0В, контакт реверсора В1, обмотки збудження М1...М4, контакт реверсора В2, шунт амперметра A3, контактор захисту КЗ, датчика струму збудження ДТВ, "мінусовій" вивід тиристорного моста VS1...VS6.
Трифазна напруга змінного струму подається на керований міст VS1...VS6 (тиристорний статичний перетворювач) від синхронного генератора через контактор KB і трансформатор збудження ТрВ. Вона випрямляється, і в результаті обмотки збудження тягових двигунів живляться постійним струмом. В процесі гальмування електропоїзда струм обмоток збудження автоматично змінюється від нуля до максимума (250А).
Таким чином, тягові двигуни стали працювати як генератори з незалежним збудженням. Струм, що виробляється ними, замикається по ланцюгу: якорі тягових двигунів М4...М1, контактор ЛКТ, контактор гальмівного перемикача ТП1, діоди VD57...VD54, контактор ЛК, обмотка трансформатора ТрД, катушка диференціального реле ДР1, головні контакти БВ, розєднувач ГР, індуктивний фільтр, струмоприймач, контактна сіть, тягова підстанція, рейки, заземляючі пристрої на осях колісних пар моторного вагона, шунт амперметра А1, катушка диференціального реле ДР2, обмотка трансформатора ТрД, контактор захисту КЗ, індуктивний шунт ІШ, датчики струму якорів ДТЯ1 і ДТЯ, якоря тягових двигунів М4...М1.
Швидкість потягу починає знижуватися, одночасно будуть зменшуватися напруга і струм якорів, гальмівне зусилля. Щоб це не відбувалося, передбачили підвищення струму збудження блоком автоматичного управління гальмуванням САУТ.
Після того, як струм збудження досягне максимального значення, (це відповідає швидкості електропоїзда приблизно 50...45 км/ч), рекуперативне гальмування стає неефективним, діоди VD57...VD54 закриваються, схема автоматично перемикається на реостатне гальмування з самозбудженням. По сигналу датчика струму збудження ДТВ, контролюючого максимальний струм збудження, блок САУТ включає реле самозбудження РСВ, яке подає живлення на катушку контактора Т і примушує РК обернутися в позицію 2. В цьому положенні РК включає свій контактор 16 і обмотки збудження починають одержувати живлення від власних якорів. Контактор 17 закорочує індуктивний шунт, який в режимі самозбудження не потрібен, оскільки в ланцюзі якорів з'явилася своя індуктивність (обмотки збудження тягових двигунів). Крім того, реостатний контроллер відключає лінійний контактор ЛК.
В процесі переходу блок САУТ виключається з роботи і перестає подавати управляючі імпульси на тиристори моста VS1...VS6. Міст закривається, відключаються контактори ОВ і КВ. Тепер струм якорів протікає по двох паралельних ланцюгах:
- перший - якорі тягових двигунів М4...М1, контактор ЛКТ, пускогальмівні резистори R8...R4, контактор Т, контакт гальмівного перемикача ТПЗ, контактор Ш, контактор реостатного контроллера 16, контакт гальмівного перемикача ТП5, контакт реверсора В1, обмотки збудження М1...М4, контакт реверсора В2, контактор захисту КЗ, контакт гальмівного перемикача ТП7, контактор реостатного контроллера 17, датчики струму якорів ДТЯ1 і ДТЯ, якоря двигунів М4...М1;
- друга - контактор Т, резистори R24, R11...R15, шунт амперметра А2, контактор КЗ.
При подальшому зменшенні швидкості електропоїзда гальмівний струм продовжує автоматично підтримуватися на заданому рівні за рахунок виводу пускогальмівних резисторів. Вступає в роботу блок реле прискорення БРУ і, як в тязі, починається перемикання реостатного контроллера до позиції 11. Резистори R8...R4 виводяться з ланцюга якорів. На позиції 11 при швидкості 15...10 км/ч автоматично починає діяти електропневматичне гальмування. Для зупинки потягу достатньо невеликого тиску в гальмівних циліндрах 0.8...1 ат. Спрощена схема режимів електричного гальмування приведена на рис. 5.7.
Відмінність гальмівних положень 1, 2 і 3 полягає в тому, що в кожному з них блок САУТ настроюється на різні установки. В положенні 3, наприклад, система підтримує струм якорів 350А, гальмівний ефект достатньо високий. В положенні 2 струм складає 250А, що знижує ефект гальмування. В положенні 1 струм якорів рівний 100А. і гальмівний ефект зовсім малий. В положенні 4 разом з електричним гальмуванням моторних вагонів діє електропневматичне гальмування на причіпних вагонах. В положенні 5 спільно з електричним гальмуванням ЕПТ включається на всіх вагонах потягу. П'ятим положенням краще не користуватися зовсім або користуватися дуже акуратно, не допускаючи підвищення тиску в гальмівних циліндрах більше 1...1,2 ат. Якщо при гальмуванні ЕПТ він стане вищим, то схема електричного гальмування розбереться, тому що накладення ефективного гальмування ЕПТ на гальмування двигунами приведе до юза колісних пар.
Електричне гальмування доцільно застосовувати до повної зупинки потягу. Це створює більш сприятливі умови для роботи устаткування. Проте його можна відключати і на високих швидкостях, наприклад, для зниження швидкості по попередженню, тобто при незалежному збудженні. В перший момент розмикається контактор Ш і по його сигналу блок САУТ перестає виробляти управляючі сигнали на тиристори моста VS1...VS6. Припиняється збудження тягових двигунів, знижується струм якорів. Після цього з витримкою часу силові контактори ЛК і ЛКТ відключаються і розбирають гальмівну схему.
Відключення електричного гальмування на низьких швидкостях (при самозбудженні) також починається з розмикання контактора Ш (в цій ситуації блок САУТ не бере участь). В ланцюг якорів вводиться резистор R23, рівний 4 Ом, що значно зменшує гальмівний струм. Потім із затримкою розмикаються силові контактори. Така послідовність відключення полегшує дугогашіння при спрацьовуванні контакторів Т і ЛКТ.
Відзначимо, що було б бажано для зупинки потягу використовувати один вид електричного гальмування, наприклад, реостатне гальмування з самозбудженням. Проте, як наголошувалося, цикл гальмування розбивається на декілька етапів, перш за все тому, що віддається перевага рекуперації, що дозволяє повертати електроенергію в контактну сіть. Тому на великій швидкості електропоїзда, коли сумарна едс генераторів перевищує напругу контактної сіті, для гальмування застосовують рекуперацію.
Тяговий двигун з послідовним збудженням не можна перевести в режим рекуперації безпосередньо, оскільки неможливо минути проміжний момент холостого ходу, необхідний для переводу електричної машини з тягового режиму в генераторний. Тому обмотки збудження тягових двигунів від'єднують від якорів і підключають до тиристорного моста VS1...VS6 (збудника). Трифазний тиристорний міст одержує живлення від синхронного генератора, який використовується, крім того, для живлення власних потреб електропоїзда. Таким чином, в початковій фазі електричного гальмування тягові двигуни послідовного збудження стають генераторами з незалежним збудженням.
Область застосування рекуперації має нижню межу: вона обмежується мінімальною швидкістю 50...45 км/ч, відповідній насиченню тягових двигунів і потужності джерела струму (синхронного генератора). Використовування рекуперативного гальмування визначається також можливістю споживання електроенергії контактної сіті іншим електрорухомим складом. Зона рекуперації значно розширяється при використовуванні тягових двигунів, розрахованих на глибоке ослаблення збудження (до 18%). При цьому для підвищення комутаційної стійкості і надійної роботи апарату щіткового колектора напругу на тягових двигунах обмежують до 750 В. З урахуванням напруги контактної сіті 3000В це зумовлює постійне послідовне з'єднання чотирьох тягових двигунів.
Як наголошувалося, збір схеми електричного гальмування починається з включення лінійних контакторів ЛК і ЛКТ, контакторів збудження ОВ і КВ. Оскільки обмотки збудження тягових двигунів живляться від стороннього (незалежного) джерела струму, реверсувати їх немає необхідності і в даній схемі реверсори залишаються в тому ж положенні, що і в режимі тяги. Якщо починати гальмування з режиму самозбудження, подібного уникнути не вдасться, щоб согласувати напрям залишкового магнітного потоку з напрямом генераторного струму.
Основна трудність використовування двох видів електричного гальмування - рекуперативного і реостатного - полягає в тому, що при відносно великих уповільненнях необхідно перейти з одного виду гальмування на інший без розриву струму ланцюга двигунів і при мінімальному зниженні гальмівної сили. Для цього у момент переходу паралельно тиристорному мосту VS1...VS6 під'єднують шунтуючі резистори R24, R11 ...R15 (див. рис. 6.7), через які протікає частина гальмівного струму. Якщо падіння напруги на них буде рівне падінню напруги на обмотках збудження тягових двигунів, то перехід на самозбудження і відключення контура незалежного збудження контакторами ОВ і KB відбудеться без кидків струму і гальмівної сили. Шунтуючі резистори R24, R11...R15 залишаються введеними в ланцюг гальмівного струму при самозбудженні.
Реостатне гальмування з самозбудженням починається із зниженої швидкості потягу, без попереднього самозбудження. Це дозволяє використовувати одні і ті ж пускогальмівні резистори як в тязі, так при гальмуванні. Застосувати реостатне гальмування до повної зупинки потягу неможливо, оскільки при малій частоті обертання якорів тягових двигунів різко зменшуються їх едс, струм і гальмівний момент. Тому для догальмування потягу застосовують електропневматичні гальма.
Необхідно відзначити, що при реостатному гальмуванні з незалежним збудженням, коли струм якорів не потрапляє в контактну сіть ( контур його протікання замикається усередині моторного вагона), тягові двигуни працюють більш задовільно. В режимі рекуперації при взаємодії з контактною сіттю тягові двигуни опиняються в найбільш важких умовах: спостерігаються почорніння колекторів, спрацьовування захисту і др, проте, при рекуперації гальмівний ефект виявляється дещо вище, ніж при реостатному гальмуванні, хоча і в тому і в іншому випадках струм якорів однаковий.
Таким чином, система гальмування електропоїзда передбачає автоматичне управління гальмівними процесами і перехід з рекуперативного гальмування на реостатне з самозбудженням при мінімально допустимій швидкості руху електропоїзда. Крім того, можливо автоматичне заміщення рекуперативного гальмування на реостатне з самозбудженням при мінімально допустимій швидкості руху електропоїзда. Крім того, можливо автоматичне заміщення рекуперативного гальмування реостатним (з незалежним збудженням) при недостатньому споживанні енергії в контактній сіті, а при відмові електричного гальма —заміна його електропневматичним гальмуванням.
Силова схема, що забезпечує роботу в даних режимах, виявляється найбільш простою при постійному послідовному з'єднанні тягових двигунів, підключених до загальних резисторів. Всі двигуни однаково навантажені, не дивлячись на відмінності їх характеристик. Недолік послідовного з'єднання двигунів - схильність до юза колісних пар.
7 . Математичне моделювання
7.1 Статичні характеристики двигуна з послідовним збудженням
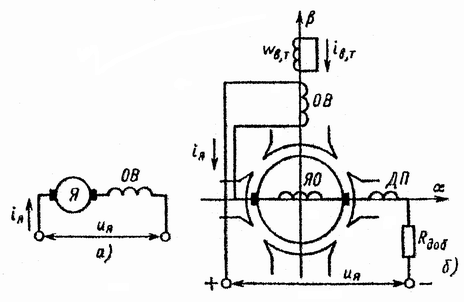
Рисунок 7.1 – Схема двигуна постійного струму з послідовним збудженням (а) та з’єднання обмоток узагальненої машини для отримання моделі (б)
При прийнятій апроксимації кривої намагнічування (рис. 7.2) механічна:
 , (7.1)
, (7.1)
та електромеханічна:
 , (7.2)
, (7.2)
характеристики при різних струмах якоря мають різні вирази. При ![]() = const ці рівняння перетворюються до виду
= const ці рівняння перетворюються до виду
 ; (7.3)
; (7.3)
 . (7.4)
. (7.4)
При ![]() = const і ті ж рівняння записуються так:
= const і ті ж рівняння записуються так:
![]() ; (7.5)
; (7.5)
![]() . (7.6)
. (7.6)
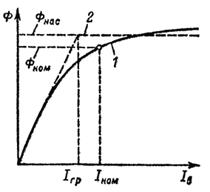
Рисунок 7.2 – Характеристика намагнічування ![]()
Рівняння (7.3) та (7.4) свідчать про те, що в області навантаження, меншого номінального, статичні характеристики двигуна послідовного збудження мають гіперболічний характер і при ![]() та
та ![]() асимптотично наближуються до вісі координат. Ця форма характеристики визначається умовами електричної рівноваги машини: при ідеальному холостому ході (
асимптотично наближуються до вісі координат. Ця форма характеристики визначається умовами електричної рівноваги машини: при ідеальному холостому ході (![]() ) е.р.с. двигуна повинна урівноважувати прикладену до якірного кола напругу
) е.р.с. двигуна повинна урівноважувати прикладену до якірного кола напругу ![]() . Так при
. Так при ![]() пострум
пострум ![]() також прямує до нуля, виконання умови
також прямує до нуля, виконання умови
![]()
можливе тільки при необмеженому зростанні швидкості. На справі швидкість ідеального холостого ходу двигуна з послідовним збудженням завдяки наявності залишкового потоку ![]() обмежена значенням
обмежена значенням ![]() . Однак поток
. Однак поток ![]() настільки малий, та значення
настільки малий, та значення ![]() набагато перевищує допустиме для двигуна за умовами механічної тривкості. Тому при проектуванні та експлуатації електроприводів з двигунами послідовного збудження необхідно виключити можливість їх роботи з малими навантаженнями, при яких швидкість двигуна може перевищити допустиму за умовами механічної тривкості.
набагато перевищує допустиме для двигуна за умовами механічної тривкості. Тому при проектуванні та експлуатації електроприводів з двигунами послідовного збудження необхідно виключити можливість їх роботи з малими навантаженнями, при яких швидкість двигуна може перевищити допустиму за умовами механічної тривкості.
При ![]() магнітне коло машини насичується і при прийнятому припущенні
магнітне коло машини насичується і при прийнятому припущенні ![]() =const. В цій області характеристики двигуна практично лінійні, подібно аналогічним характеристикам двигуна з незалежним збудженням.
=const. В цій області характеристики двигуна практично лінійні, подібно аналогічним характеристикам двигуна з незалежним збудженням.
Природні характеристики двигуна з послідовним збудженням показані на рис. 7.3, а, б. Сильний позитивний зв’язок за струмом, який створюється послідовною обмоткою збудження двигуна, практично ліквідує вплив розмагнічуючої дії реакції якоря та призводить в області допустимого перевантаження до зростання потоку більше номінального значення на 10 – 15 %. Тому при цьому коефіцієнті допустимого перевантаження за струмом ![]() = 2 – 2,5 перевантажувальна спроможність за моментом у двигунів з послідовним збудженням вище, ніж при незалежному збудженні, і лежить в межах
= 2 – 2,5 перевантажувальна спроможність за моментом у двигунів з послідовним збудженням вище, ніж при незалежному збудженні, і лежить в межах ![]() = 2,5 – 3.
= 2,5 – 3.
Форма природної механічної характеристики двигуна з послідовним збудженням дозволяє при зниженні навантаження підвищувати мінімальну швидкість в 1,5 – 2 рази, забезпечуючи підвищення продуктивності при заданій потужності двигуна. При цьому важливою перевагою двигуна є підвищена перенавантажувальна спроможність.
В зв’язку з нелінійністю кривої намагнічування розрахувати природні характеристики двигуна з послідовним збудженням тільки за його номінальними даними неможливо, тому при проектуванні слід користуватися природними характеристиками ![]() і
і ![]() , що наведені в каталогах.
, що наведені в каталогах.
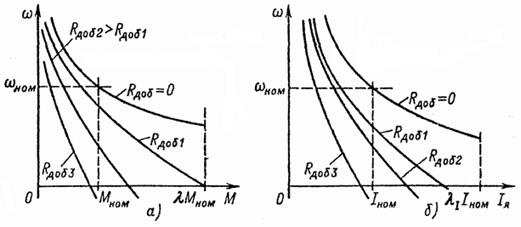
Рисунок 7.3 – Механічні (а) та електромеханічні (б) статичні характеристики двигуна з послідовним збудженням
Статична жорсткість механічної характеристики двигуна послідовного збудження залежить від навантаження. При малому навантаженні двигун має м’яку характеристику, з зростанням навантаження модуль жорсткості зростає і при ![]() прямує до сталого значення, яке визначається (7.7):
прямує до сталого значення, яке визначається (7.7):
![]() (7.7)
(7.7)
Відповідно введення додаткового опору зменшує жорсткість механічних характеристик. Реостатні механічні та електромеханічні характеристики показані на рис. 7.3, а, б разом з природними характеристиками, відповідаючими ![]() , на якому бачимо, що введення додаткового опору в коло якоря дозволяє обмежити момент та струм короткого замикання двигуна.
, на якому бачимо, що введення додаткового опору в коло якоря дозволяє обмежити момент та струм короткого замикання двигуна.
7.2 Динамічні властивості двигуна з послідовним збудженням
Математичний опис динамічного процесу перетворення енергії в двигуні з послідовним збудженням (з урахуванням умовної обмотки вихрових струмів) можно записати у слідуючому вигляді:
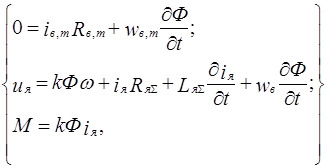 (7.8)
(7.8)
![]() .
.
Цей математичний опис процесів електромеханічного перетворення енергії в двигуні з послідовним збудженням містить добутки змінних, тому використовувати його для аналіза динамічних властивостей перетворювача можливо тільки за допомогою ЕОМ. Але загальні закономірності, основні динамічні властивості електромеханічного перетворювача з послідовним збудженням можуть бути виявлені аналітичним шляхом, якщо виконати лінеаризацію рівнянь механічної характеристики (7.8) поблизу точки статичної рівноваги. В зв’язку з тим що лінеаризація здійснюється поблизу точки статичної рівноваги, криву намагнічування слід апроксимізовувати торканою в точці ![]() ,
, ![]() , як показано на рис. 7.4, при цьому
, як показано на рис. 7.4, при цьому ![]() і перші два рівняння системи (7.8) можуть бути приведені до виду
і перші два рівняння системи (7.8) можуть бути приведені до виду
![]()
![]()
![]() ;
;
![]() и
и ![]() – сталі часу відповідно еквівалентного контура вихрових струмів (див. рис. 7.1, б) та обмотки збудження. Віднявши почленно з першого рівняння друге, отримаємо більш зручний для розв’язання вид системи (7.8):
– сталі часу відповідно еквівалентного контура вихрових струмів (див. рис. 7.1, б) та обмотки збудження. Віднявши почленно з першого рівняння друге, отримаємо більш зручний для розв’язання вид системи (7.8):
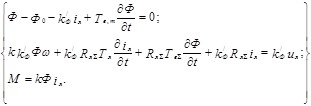 (7.9)
(7.9)
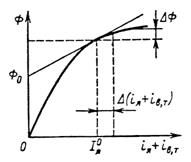
Рисунок 7.4 – Лінеаризація кривої намагнічування
Лінеарізуємо систему (7.9) шляхом розкладання в ряд Тейлора поблизу точки статичної рівноваги, позначивши ![]() , отримаємо
, отримаємо
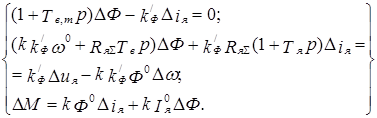
![]() (7.10)
(7.10)
Розв’язавши систему (7.10) відносно ![]() та
та ![]() , отримаємо лінеаризовані рівняння електромеханічної та механічної характеристик двигуна у вигляді
, отримаємо лінеаризовані рівняння електромеханічної та механічної характеристик двигуна у вигляді
 ; (7.11)
; (7.11)
 . (7.12)
. (7.12)
Рівняння (7.11) та (7.12) характеризують основні динамічні особливості перетворювача з послідовним збудженням при умові обмеження відхилення змінних від точки статичної рівноваги вузькими межами.
Структурна схема лініарезованого електромеханічного перетворювача з послідовним збудженням, відповідаюча (7.12), представлена на рис. 7.5.
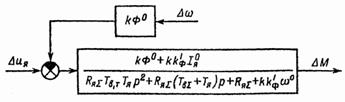
Рисунок 7.5 – Структурна схема лінеаризованої ЕМП з послідовним збудженням
За допомогою цієї схеми визначимо передаточну функцію динамічної жорсткості механічної характеристики:
![]()
 . (7.13)
. (7.13)
Рівняння (7.13) свідчить про те, що динамічна жорсткість в даному випадку значно залежить від положення точки статичної рівноваги на механічній характеристиці двигуна.
Лінеаризовані характеристики двигуна з послідовним збудженням (7.11) та (7.12) можуть бути використані для аналіза усталених коливальних режимів електромеханічних систем з двигуном послідовного збудження, а також для перевірки стійкості та якості замкнених систем регулювання з таким двигуном при обмежених відхиленнях від точки статичної рівноваги.
На рис. 6.6 представлена структурна схема електромеханічної системи з двигуном послідовного збудження, яка може бути використана при моделюванні її на ЕОМ. При розгляданні динамічних режимів, в яких відхилення змінних від точки статичної рівноваги не виходять за межі допустимої лінеаризації нелінійної механічної характеристки двигуна, слід користуватися лінеаризованим рівнянням динамічної механічної характеристки (7.12).
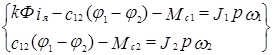 (7.14)
(7.14)
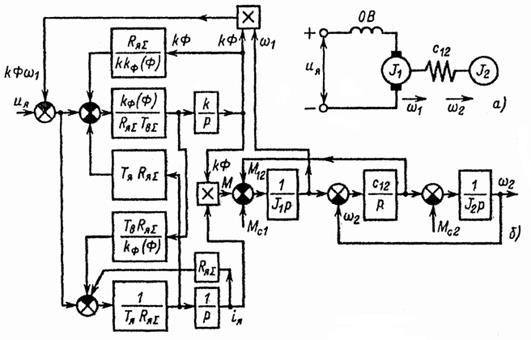
Рисунок 7.6 – Електромеханічна система електропривода постійного струму з двигуном послідовного збудження (а) та її структурна схема (б)
7.3 Визначення параметрів об’єкту регулювання – двигуна послідовного збудження
Вихідні дані
Двигун УРТ-110Б
Номінальна потужність ![]() , кВт...................................................200
, кВт...................................................200
Номінальна напруга ![]() , В...................................................................1500
, В...................................................................1500
Номінальний струм якоря ![]() ,А....................................................146
,А....................................................146
Номінальна швидкість обертання ![]() , об/хв.............................1145
, об/хв.............................1145
Номінальний момент ![]() , Н∙м........................................................1670
, Н∙м........................................................1670
Номінальний струм збудження ![]() , А............................................115
, А............................................115
Кількість пар полюсів 2р.........................................................................4
Кількість витків обмотки збудження на полюс ![]() ..............................78
..............................78
Опір якоря ![]() , Ом................................................................................0,223
, Ом................................................................................0,223
Опір обмотки збудження ![]() , Ом........................................................0,248
, Ом........................................................0,248
Опір обмоток додаткових полюсів ![]() , Ом................................0,095
, Ом................................0,095
Падіння напруги під щітками ![]() , В...............................................2
, В...............................................2
Момент інерції привода ![]() , кг∙
, кг∙![]() ................................................140,3
................................................140,3
Опір якірного кола, Ом:
![]() (7.15)
(7.15)
![]()
Індуктивність якірного кола, Гн:
![]() (7.16)
(7.16)

Електромагнитна стала часу якірного кола двигуна, с:
 (7.17)
(7.17)
![]()
Коефіцієнт нахилу кривої намагнічування (з довідникових даних), Ом∙с:
![]() (7.18)
(7.18)
Індуктивність кола збудження, Гн:
![]() (7.19)
(7.19)
![]()
Електромагнітна стала часу кола збудження, с:
 (7.20)
(7.20)
 .
.
Номінальна е.р.с. двигуна, В:
![]() (7.21)
(7.21)
![]()
Коефіцієнт А, Н∙м∙хв∙с/об:
![]() (7.22)
(7.22)
![]() .
.
Коефіцієнт ![]() , В∙хв/об:
, В∙хв/об:
![]() (7.23)
(7.23)
![]() .
.
Коефіцієнт ![]() , Н∙хв/А:
, Н∙хв/А:
![]() (7.24)
(7.24)
![]() .
.
Електромеханічна стала часу, с:
 (7.25)
(7.25)
![]() .
.
Передаточний коефіцієнт кола збудження двигуна, Ом:
 (7.26)
(7.26)
![]() .
.
7.4 Математичне моделювання за допомогою програмного забезпечення MATLAB 6.5
Запропонована схема електромеханічного електроприводу постійного струму з двигуном послідовного збудження (рис. 7.6) найчастіше застосовується при розв’язанні наукових задач. Застосуємо для матмоделювання спрощену схему, яка не містить моменту інерції робочого органу ![]() (та пружності
(та пружності ![]() ), представлену на рис. 7.7.
), представлену на рис. 7.7.
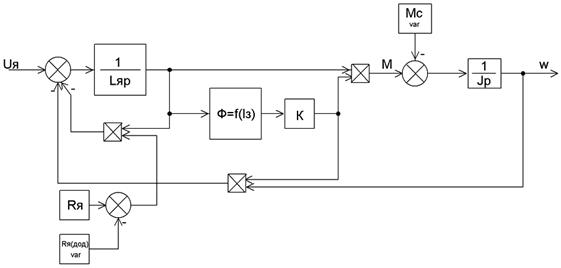
Рисунок 7.7 – Структурна схема двигуна послідовного збудження
Структурна схема змодельованого за допомогою ПЗ MATLAB 6.5 двигуна послідовного збудження представлена у додатку А.
Змінюючи параметри вхідної напруги, додаткового опору в колі якоря, та момент опору, за допомогою функції Simulink, отримаємо залежності ![]() та
та ![]() двигуна послідовного збудження, представлені у додатку А.
двигуна послідовного збудження, представлені у додатку А.
8 . Економічна частина
8.1 Коротка характеристика пропонованого технічного рішення
Коротко охарактеризуємо пропонований у дипломному проекті захід:
процес розгону електропоїзда при реостатно-контакторній системі керування тяговими електродвигунами характеризується великими втратами енергії на пускових реостатах, порядку 33 %, тобто коефіцієнт корисної дії системи керування ТЕД складає менше 67 %. При використанні тиристорно-імпульсної системи керування ККД складає не менше 95% за рахунок чого і виникає економія електроенергії, витраченої електропоїздом на тягу.
8.2 Короткий опис методики розрахунку та економічного ефекту
Для розрахунку економічного ефекту від запропонованих заходів з
модернізаціі електропоїзда ЕР-2 треба розрахувати складові економічногоефекту:
- капітальні вкладнення на модернізацію одного електропоїзда;
- витрати на демонаж базової системи керування на електропоїзд;
- витрати на монтаж та налагодження нової системи керування на електро-поїзд;
- визначення економіі річних експлуатаційних витрат модернізованого елек-тропоїзда в порівнянні з існуючим.
Після цього визначаємо економічний ефект від запропонованної системи керування електропоїздом.
8.3 Визначення складових економічного ефекту
8.3.1 Визначення єдиночасових витрат на придбання нового обладнання, його монтаж та налагодження
Капітальні вкладення на модернізацію одного моторного вагону складаються з наступних елементів:
- витрати на придбання двох силових тиристори, вартістю 4000 гривень кожний;
- витрати на придбання елементів тиристорно-імпульсного перетворювача вітчизняного виробництва, загальною вартістю 8000 гривень;
- виготовлення корпуса для ТІП і матеріали, вартість якого складає 2500 грн.
- зборка та налагодження виробу коштує 1500 грн.
Виходячи з цих даних розраховуємо витрати на придбання ТІП:
Впрт = 2 • 4000 + 8000 + 2500 + 1500 =20000 грн.
А тому, що на електропоїзді п"ять моторних вагонів, то на модернізацію одного електропоїзда ЕР-2 необхідно п"ять тиристорно-імпульсних перетворювачів. А значить витрати на придбання п'яти ТІП будуть дорівнювати:
Впр = 5 • 20000 = 100000 грн.
Витрати на демонтаж базової системи керування складуть 2,5% від витрат на придбання, а витрати на монтаж налагодження нової системи керування, тобто ТІП, складе 3,5% від витрат на придбання, що в сумі складе 6%.
Виходячи з цих даних розраховуємо капітальні вкладення по формулі:
DК = Впр + Вмон( нал) (8.1)
ΔК = 100000 + 100000·6 / 100 = 106000 грн.
8.3.2 Визначення економії річних експлуатаційних витрат при використані модернізованого електропоїзду в порівнянні з існуючим
Виходячи з даних локомотивного депо “Харків”, сумарна добова витрата електроенергії Ед на один електропоїзд ЕР-2 дорівнює, кВт • год:
Ед = ве ۰ΣРlбр(доб)/10000,
де ве – витрати електроенергії на 10000 т٠ км٠бр,
ве = 255 кВт٠год/10000 т٠км٠бр;
ΣРlбр(доб) – вантажообіг одного електропотяга за добу, т٠км/доб.
ΣРlбр(доб) = Qбр(доб) • Sn,
де Qбр(доб) – маса брутто одного електропоїзда (Qбр(доб) = 580 т);
Sn – середня відстань, яку електропоїзд проходить за добу (Sn = 414 км/доб).
ΣРlбр(доб) = 580 • 414 = 240120 т٠км/доб
Ед = 255 • 240120 кВт • год
20% сумарних добових витрат електроенергії - витрати на пусковий режим роботи, коли ККД системи керування складає 67%. Цей процес розрахований у виразу:
Ее = 6123 • 20/100 = 1224 кВт·год
Тобто 1224 кВттод витрачається електропоїздом у добу у режимі розгону.
Відповідно при використанні ТІП економія електроенергії (ΔЕе) складає в добу
ΔЕе = 1224 • (67/95) = 863 кВт۰год
де 95 % - ККД при використанні тиристорно-імпульсної системи керування;
67 % - ККД у процесі розгону існуючої системи керування.
Вартість одного кВт۰год на тягу поїздів складає 16,67 коп на даний період часу.
Економія електроенергії (Еед) у добу одним потягом буде складати:
ΔЕед= 863٠16,67= 14386 коп.= 143.86 гривні
Економія електроенергії у рік (Еер) одним електропоїздом буде складати:
Еер = 143.86٠365 = 52509.7 грн.
Строк окупності (Ток) нової системи керування наступить через
Ток= 106000/52509.7 = 2
Тобто 2 роки, що доводить нам про окупність. На залізничному транспорті окупність складає не більше 8 років.
8.4 Розрахунок економічного ефекту від модернізації електропоїзда ЕР-2
Розрахунок економічного ефекту здійснюється за формулою:
ΔЕт =ΔЕэ/(Pp + Ен) - ΔК, (8.2)
де ΔЕэ - економія експлуатаційних витрат;
ΔЕэ = Еер = 52509.7 грн
Ен - норматив приведення різночасних витрат і результатів (Ен = 0,1);
Рр - коефіцієнт реновації (повне відновлення первісної вартості основних фондів), визначається за формулою:
Рр = Ен/(1+Ен) - 1 (8.3)
Де tсл-термін служби нової техніки (tсл = 20років);
К-одноразові витрати при реалізації заходу.
Розрахуємо коефіцієнт реновації за формулою (8.3):
Рр = 0,1/(1 + 0,1) - 1 = 0,0174
Отримані значення з виразів (8.1), (8.3) підставимо у формулу (8.2) і одержимо значення економічного ефекту, який дорівнює:
ΔЕт = (52509.7 / (0,0174+ 0,1)) - 106000 = 341271,72 гривні
Розрахунок показав, що економічний ефект від запропонованої модернізації за двадцять років експлуатації буде 341271,72 гривень.
Висновок: розрахунок показав доцільність запропонованої модернізації. Економічний ефект за 20 років експлуатації модернізованого електропоїзда буде складати 341271,72 грн.
9. Заходи 3 охорони праці
9.1 Загальні положення
Охорона праці - це система законодавчих, соціально-економічних, санітарно-гігієнічних та організаційних заходів, забезпечуючих безпеку, зберігання здоров'я та робото здатність людини у процесі праці. Практична діяльність в галузі охорони праці, організована та проводима на основі цієї системи, а також творчого планування та здійснення усього комплексу заходів, є найважливішим обов'язком адміністрації підприємства, приносить все більш помітного поліпшення умов праці, підвищення рівня її безпеки, послідовного зниження травматизму та профзахворювання.
Найважливішою умовою нормальної експлуатації машин електрорухомого складу з обов'язковим забезпеченням безпеки руху є виконання умов з охорони праці. Для цієї мети проводиться навчання працівників безпечним методам праці і перевірка знань або правил з охорони праці.
Безпосередню відповідальність за безпеку праці на дільниці депо несе начальник локомотивного депо. Відповідальність за охорону праці на підприємстві покладена на головного інженера. Оперативний контроль і систематичну роботу з охорони праці з підлеглими безпосередньо проводить інженер з охорони праці. Суспільний контроль за охороною праці здійснюється організаціями цеху, депо або підприємства.
Одним з найважливіших заходів щодо забезпечення охорони праці є інструктування. Розрізнюють такі види інструктажу: ввідний, первинний на -робочому місці, повторний, позаплановий, поточний.
Ввідний інструктаж проводять з усіма знову прийнятими в депо чи переведеними на іншу роботу особами. Ціль інструктажу - ознайомлення з загальними положеннями, по охороні праці, умовами роботи і правилами внутрішнього трудового розпорядку підприємства.
Первинний інструктаж на робочому місці проводять з усіма робітниками, інженерно-технічними працівниками, молодшим обслуговуючим персоналом при прийомі на роботу чи переводі з однієї посади на іншу. Ціль інструктажу - ознайомлення з конкретною виробничою обстановкою на даному робочому місці і безпечних умовах праці.
Періодичний інструктаж працівників проводять з метою повторного навчання їх питанням охорони праці по наступній тематиці: вимоги техніки безпеки і виробничої санітарії при виконанні окремих видів роботи; міри безпеки при обслуговуванні електровоза, машин, верстатів, устаткування, інструментів, механізмів і тощо; вимоги електробезпечності; гігієна праці при виконанні різних видів роботи; окремі розділи трудового законодавства; передовий досвід по безпечних прийомах роботи; накази і вказівки по охороні праці.
Позачерговий інструктаж проводиться з робітниками, молодшим обслуговуючим персоналом і інженерно-технічними працівниками з метою: ознайомлення з мірами безпеки в зв'язку з упровадженням нових технологій і технічних засобів; вивчення нових правил, інструкцій з техніки безпеки і виробничої санітарії; роз'яснення особливостей вимог техніки безпеки перед виконанням роботи на новій ділянці в умовах праці, що змінилися, тощо; розбору нещасливого випадку чи порушення вимог техніки безпеки, що не призвело, але могло б призвести до травми.
Контроль за забезпеченням охорони праці здійснюється у вигляді перевірки знань працівниками депо питань охорони праці, ведення відповідної документації, організації суспільного контролю по охороні праці.
Перевірку знань по охороні праці ремонтного персоналу депо проводить комісія в складі начальника чи депо його заступника, інженера по техніці безпеки, майстра цеху і члена профспілкового комітету депо (цеху). Перевірки бувають первинними, періодичними і позачерговими (при перерві в роботі понад три чи місяці після порушення вимог техніки безпеки і виробничої санітарії).
Вся проведена по навчанню і контролю робота повинна відображатися у відповідних документах. Вступний інструктаж для всіх осіб, поза залежністю від того, у який цех вони надходять, реєструється в єдиному для усього депо «Журналі обліку інструктажу з охорони праці».
Первинний інструктаж на робочому місці, як і інші наступні види інструктажів (щоденний, періодичний, позачерговий), реєструються в цеховому «Журналі обліку інструктажу з охорони праці». Відповідальні особи за ведення і збереження цехових журналів призначаються наказом по депо. Результати первинних, періодичних і позачергових перевірок знань по охороні праці реєструються в «Журналі обліку перевірок знань по охороні праці».
Записи зауважень по порушенню правил техніки безпеки виробляються керівниками підприємства, інженерно-технічними працівниками, суспільними інспекторами і т.д. У журнал заносять усі порушення правил техніки безпеки, допущені працівниками даного цеху.
У ремонтних цехах і відділеннях депо необхідно виконувати наступні вимоги техніки безпеки. При роботі бути уважним, не відволікатися, виконувати тільки ту роботу, що доручена майстром (бригадиром). Бути уважним до сигналів, подаваним водіями транспорту, що рухається, крановиками мостових кранів, і виконувати їх. Не проходити і не стояти під піднятим вантажем. Не перебігати шляхи перед транспортом, що рухається, і переходити оглядові канави тільки по перехідних містках.
Не працювати на верстатах, машинах, механізмах при відсутності несправності захисних огороджень. Не включати і не зупиняти (крім аварійних випадків) машини, верстати і механізми, робота на який не доручена майстром.
Строго і беззаперечно дотримувати вимоги застережливих плакатів, що забороняють, написів, знаків безпеки. Пам'ятати, що плакати, що забороняють, можуть бути зняті тільки тою особою, що їх установила.
Заходи з пожежної безпеки. Для профілактики пожеж згідно з ГОСТ 12.1.004 - 91 необхідно:
- протипожежний пристрій, що призначений для гасіння пожеж в цеху розмістити на технологічній платформі;
- слідкувати, щоб встановлене в цехах і на ділянках протипожежне обладнання було справним, опломбованим і його стан відповідав встановленим нормам.
В електромашинному відділенні існують такі небезпечні фактори:
- ураження електричним струмом;
- пожежа;
- механічні ураження.
Шкідливими факторами в електромашинному цеху є такі:
- забезпечення мікроклімату;
- шум;
- освітлення;
- запилованість.
На підставі таких небезпечних та шкідливих факторів забезпечуємо такі заходи:
- заземлення та занулення усіх електричних механізмів згідно з ГОСТ 12.1.030-81;
- для профілактики пожеж згідно з ГОСТ 12.1.004 - 91 необхідно слідкувати щоб встановлене в цехах і на ділянках проти пожежне обладнання було справним, опломбованим. Протипожежний пристрій, що призначений для гасіння пожеж в цеху розмістити на технологічній платформі;
- проти механічних уражень згідно з ГОСТ 12.4.026-76 ставимо огородження небезпечних місць з відповідним сигнальним кольором, а також знаки небезпеки;
- для забезпечення необхідного мікроклімату згідно з ГОСТ 12.1.005-88 встановлюємо приточно-витяжну вентиляцію в цеху;
- проти шуму електро обладнання захищаємо кожухами згідно з загальними діями безпеки ГОСТ 12.1.003-83;
- згідно з СНиП II-4-79 забезпечуємо як природне, так і штучне освітлення.
9.2 Розрахунок освітлення
Вірно спроектоване та виконане виробниче освітлення покращує умови зорової роботи, сприятливо впливає на виробничу середовище, що здійснює позитивний вплив на працюючого, підвищує безпечність праці та знижує травматизм.
Раніше за все передбачається природне освітлення, як найбільш економічне та досконале, з точки зору медико-санітарних вимог, в порівнянні з штучним освітленням.
В залежності від місця розташування світлових прорізів є три системи природного освітлення: бокове, верхнє та комбіноване.
В якості величини, що нормується та характеризує природне освітлення приймається відносна величина - коефіцієнт природної освітленості (КЕО), який визначається за формулою:
е = (Ев/Ен)٠100 (9.1)
де Ев - освітленість всередині приміщення, лк;
Ен - зовнішня горизонтальна освітленість, яка створюється розсіянимсвітом всього небозводу, лк.
Значення норми КЕО визначається СНиП П-4-79 "Естественная и искусственная освещенность" в залежності від типу приміщення та розряду виконуваних робіт, системи освітлення. Для електромашинного відділення при боковому освітленні КЕО=1% [Методические указания к лабораторной работе "Исследование естественного освещения" № 770, 23 страница.].
Потрібна площа світових прорізів, яка забезпечує необхідне значення КЕО при боковому освітленні, визначається за формулою:
Sо = (Sn٠en٠ή۰kзд۰kз/100۰τзаг۰τпід) (9.2)
де So - площа вікон, м2;
Sn - площа підлоги, м2, Sn = 600 м2;
ен - нормований коефіцієнт КЕО при боковому освітленні ен = 0,01;
τзаг - загальний коефіцієнт світлопроникнення світового прорізу. Визначається за формулою:
τзаг = τ1 ۰ τ 2 ۰ τ3 ۰ τ4 ۰ τ5 (9.3)
де τ1- коефіцієнт світопропускання матеріалу. Для подвійного листового скла, τ1 = 0,8;
τ 2 - коефіцієнт, який враховує витрати світла в плетенні світлопроєма, τ 2 = 0,6;
τ3 - коефіцієнт, що враховує витрати світла в шарі забруднення скла. Для електромашинного відділення з незначним забрудненням, τ3 = 0,8;
τ4 - коефіцієнт, що враховує витрати світла в несучих конструкціях. Для залізобетонних ферм та арок τ4 = 0,8;
τ5 - коефіцієнт, що враховує витрати світла в сонцезахисних пристроях, τ5 = 1.
τпід - коефіцієнт, що враховує підвищення КЕО при боковому освітленні, завдяки світлу, яке відбивається від поверхонь приміщень. τпід = 2,1;
ή - світова характеристика вікон, приймаємо ή = 15;
kзд - коефіцієнт, що враховує, затемнення вікон будинками, які розташовані навколо. Приймаємо kзд = 1;
kз - коефіцієнт запасу. Для електромашинного відділення приймаємо kз = 1,5.
Таким чином по формулі 8.2 отримаємо:
Sо = (600۰1۰15۰1۰1,5/100۰0,8۰0,6۰0,8۰0,8۰1۰2,1) = 44,64
Тобто Sо = 44,64 м2.
У випадках коли природної освітленості недостатньо, робочі поверхні повинні освітлюватися штучним світлом. Згідно зі СНиП П-4-79 для електромашинного відділення рекомендоване загальне освітлення при нормованій освітленості Е=100лк.
Загальне освітлення приміщення потрібно здійснити світильниками з газорозрядними джерелами світу (ДРЛ, ДРІ та люмінесцентними лампами). Його можливо розрахувати за методом питомої потужності, при якому враховуються:
- тип світильників;
- висота підвісу та площа приміщення;
- коефіцієнт відбиття стелі, стін, підлоги;
- коефіцієнт запасу R , який враховує забруднення поверхонь та
коефіцієнт Z, що визначає відношення середньої освітленості до
мінімальної.
При загальній освітленості в 100 лк, світильниках ОДР-2-40 з люмінесцентними лампами ЛБ-100 та висоті підвісу світильників 4-6 м, площі приміщення 600 м2, коефіцієнтах pn = 0,5; pс = 0,3; pпот = 0,1; R = 1,5; Z = 1,15; питома потужність Wуд = 7,6 Вт۰м2.
Необхідна кількість ламп визначається за формулою:
N = S۰ Wуд /Pл (9.4)
де Рл - потужність кожної лампи. Для ЛБ-40 Pл = 100 Вт;
S - площа приміщення, S = 600 м2
N = 600۰7,6/100 = 45,6
Приймаємо кількість ламп рівним 46. Враховуючи те, що в кожній світовій установці по 2 лампи, то кількість світильників складатиме 23 штуки.
Висновок
В даному дипломному проекті планується покращення руху електропоїздів постійного струму шляхом заміни резисторно - контакторної системи пуску на імпульсно реостатну систему руху поїздів. Ця система дозволяє покращити комфортність перевезення пасажирів та значно зменшити втрати електроенергії в процесі пуску, розгону та гальмування.
В даній роботі є розділ, де за допомогою програми MatLab 6.5 Simulink розглянута математична модель модернізованого тягового електроприводу електропоїзду ЕР2 з відповідними розрахунками та діаграмами на яких дуже гарно представлено всі плюси запропонованої модернізації.
В дипломному проекті розраховується економічний ефект модернізованого електропоїзду з імпульсно - тиристорною системою, де зазначається, що за 20 років експлуатації одного модернізованого електропотягу він встановлює майже 400000 грн.
В розділі охорони праці розраховується освітлення, розглядаються вимоги з охорони праці та техніці безпеки до слюсарів моторвагонного депо “Харків”.
Похожие рефераты:
Розробка інвертора напруги для апаратури зв'язку
Діагностика системи запалення ДВЗ
Автомобілі з гібридною трансміссією і комбінованою енергетичною установкою
Розробка, дослідження системи керування на основі нейронної мережі
Теорія електричних і електронних кіл
Модернізація системи кеування електроприводом стрічкового конвеєра
Технологія монтажу, ремонту та правила технічного обслуговування синхронних двигунів
Вимірювання електричних струмів і напруг
Проектування автоматизованого електропривода візка мостового крану
Технічне обслуговування й ремонт електричних машин
Експлуатація та неполадки асинхронних двигунів
Вибір основного електрообладнання і мережі електропостачання пасажирського вагона
Схеми електрообладнання тракторів ЮМЗ
Система моделювання Electronics Workbench
Розвиток і вдосконалення льотної промисловості України