| Скачать .docx |
Реферат: Цифровой измерительный вольтметр
Министерство общего и профессионального образования Российской Федерации
Новосибирский Государственный Технический Университет
Факультет Автоматики и Вычислительной Техники
Кафедра Сбора и Обработки Данных
КУРСОВОЙ ПРОЕКТ
по дисцеплине :
ПРОЕКТИРОВАНИЕ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ
Тема:
«Цифровой измерительный вольтметр»
Принял:
Группа: А-51 Подпись:
Выполнил: Рарова Т. Л. Дата:
Оглавление .
1. Оглавление..................................................................................2
2. Введение......................................................................................3
3. Техническое задание на курсовой проект................................4
4. Разработка структурной схемы.................................................5
5. Разработка принципиальной схемы.........................................
5.1 Входной делитель................................................................
5.2 Входной усилитель.............................................................
5.3 Устройство сравнения..........................................................
5.4 Аналогово-цифровой преобразователь............................
5.4.1 Переключатель..............................................................
5.4.2 Интегратор................................................................
5.4.3 Компаратор................................................................
5.4.4
1. Анализ погрешностей..............................................................
2. Проверка класса точности.........................................................
3. Заключение................................................................................39
4. Список литературы. .................................................................40
1. Введение.
В настоящее время широко применяются цифровые измерительные приборы(ЦИП) , имеющие ряд достоинств по сравнению с аналоговыми электроизмерительными приборами.
Цифровыми называются приборы, автоматически вырабатывающие дискретные сигналы измерительной информации, показания которых представляются в цифровой форме. В цифровых приборах в соответствии со значением мзмеряемой величины образуется код, а затем в соответствии с кодом изменияемая величина представляется на отчетном устройсве в цифровой форме.
Цифровой прибор включает в себя два обязательных функциональных узла: аналогово-цифровой преобразователь(АЦП) и цифровое отчетное устройство.
Аналогово-цифровые преобразователи предназначены для преобразования аналоговых сигналов в соответствующие им цифровые, то есть для преобразования сигналов с неприрывной шкалой значений в сигналы , имеющие имеющие дискретную шкалу значений. А отчетное устройство отражает значение измеряемой величины в цифровой форме.
Классификация методов преобразования напряжения в цифровой код весьма разнообразна. По виду алгоритма работы АЦП подразделяются на преобразователи , использующие методы последовательного счета, поразрядного кодирования и считывания.
Метод преобразования выбирается в зависимости от конкретных условий использования вольтметров , назначения вольтметра и их стоимости. Одним из отличительнх признаков , характеризующих свойства преобразователей , является наличие или отсутствие в структурной схеме обратной связи. Поэтому по принципу действия АЦП делятся на преобразователи прямого преобразования (без обратной связи) и с обратной связью(уравновешиваемые , замкнутые), например следящие и поразрядного кодирования.
Представителями алгоритма последовательного счета являются преобразователи с промежуточным преобразованием напряжения в другую аналоговую величину ( временный интервал, частоту ), а также интегрирующего типа. Последние обеспечивают высокую помехоустойчивость и точность , но уступают по быстродействию другим АЦП.
Наиболее распространненым вариантом пребразователей интегрирующего типа являются АЦП с двухтактным интегрированием (dual slope).
Интегрирующие двухтактные преобразователи обладают прекрасной точностью исключают ошибки при распространении сигналов в схеме и компенсируют изменения частоты синхроимпульсов и постоянной времени интегратора, поскольку эти изменения воздействуют в равной степени на оба фронта пилообразного импульса . Преобразователь компенсирует также токи и напряжения смещения компататора , поскольку предусмотрены два перехода через нуль, обеспечивающие это.
Этот метод экономичен при применении в преобразователях высокого разрешения , но из-за большой постоянной времени цепей быстродействие преобразователей не превышает 100 преобразований/ секунду. Как правило, цифровая информация на выходе этих АЦП представляется в специальном коде, предназначенном для непосредственного управления светодиодными цифровыми табло с семисегментными индикаторами либо табло, выполненными на жидких кристаллах.
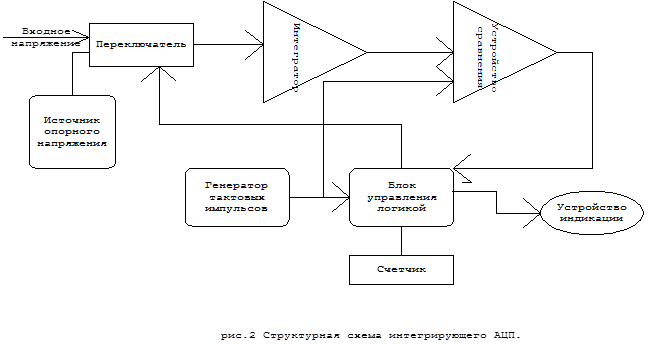
2. Разработка структурной схемы.
В цифровых измерительных приборах показания представляются в виде дискретных чисел на отсчетном устройстве. Преимущества такого представления связаны с уменьшением субъективных ошибок из-за параллакса и ускорением считывания.
В измерительных вольтметрах используются ,в основном, схемы интегрирующего АЦП(смотри ранее).
В состав двухтактных интегрирующих АЦП обычно входят операционные усилители, компаратор напряжения, аналоговые ключи, источник опорного напряжения, двоично-десятичный счетчик, регистр ,дешифратор, генератор тактовых импульсов, выходные схемы управления(устройство индикации).
На рисунке 1 изображена структурная схема цифрового измерительного вольтметра.
Работа прибора ,согласно схеме, происходит следующим образом : входной сигнал проходит через входной аттенюатор (делитель и буферный усилитель) , управляемый устройством управления аттенюатором . Схема реализована так, что на устройство сравнения попадает всегда сигнал имеющий величину близкую к 0,1 вольт, то есть импульс сравнения равен 0,1 вольт. Этот импульс сравнения поступат с источника опорного напряжения .
Атоматический выбор пределов измерения происходит следующим образом :
Работа интегрирующих АЦП происходит в два такта:
первый такт: аналоговые ключи К2 и К3 разомкнуты, ключ К1 замкнут , так что неизвестное напряжение U1 подаётся в интегратор в течении времени T0 . Импульсы синхронизации обеспечиваются устройстовом управления. После фиксированного числа синхроимпульсов общей продолжительностью Т0 ключ К1 размыкается, а ключи К2 и К3 замыкаются, начался
второй такт:
в этот момент времени значение Uм равно :
Uм=U1*T0\t (1),
где t- постоянная времени интегратора.
На вход интегратора подключается опорный входной сигнал, имеющий обраттую полярность по отношению к аналоговому входному напряжению U1, так что выходной сигнал интегратора уменьшается от Uм до нуля, и в этот момент устройстово управления блокируется до начала следующего цикла сброса. Напряжение на выходе интегратора теперь равно нулю, так что имеем
0=Uм - Е0*T2/t (2)
Из выражения (1) и (2) получаем
U1=E0*T2/T1.
Поскольку E0 и Т1 постоянны , показание счетчика (Т2) дает значение неизвестного аналового входного сигнала.
Благодаря ключу К3 интегратор разряжается на землю .
Из последнего уравнения видно , что метод двойного интегрирования обеспечивает независимость точности прибора от долговременной нестабильности элементов цепи интегрирования RC, а также от долговременной нестабильности частоты генератора тактовых импульсов . Медленные изменения величин R, C и частоты повторения счетных импульсов , из которых формируется интервал интегрирования первого такта T1, могут привести лишь к небольшим изменениям общего времени измерения . Это объясняется тем , что влияние указанных изменений взаимно компенсируется на двух интервалах интегрирования. Если , например, возрастает частота появления импульсов , то до момента начала компенсации выходного напряжения интегратора будет проходить меньшее время (T1 уменьшится). Выходное напряжение интегратора U01 будет несколько меньшим ,чем оно было бы при прежней частоте , но на интервале интегрирования опорного напряжения разместится несколько большее число счетных импульсов , так как частота их стала выше. Таким образом, уменьшение выходного напряжения интегратора будет скомпенсировано. Если сопротивление или емкость цепи интегрирования изменяется , то это приведет к соответствующему изменению измеряемого и опорного напряжений на выходе интегратора , так что эти изменения взаимно компенсируются. Погрешность измерения прибора в основном определяется нестабильностью источника опорного напряжения и нестабильностью коэффициента усиления входного усилителя. Структурная схема одного из цифровых вольтметров , основанных на этом методе , и временные диаграммы, поясняющие его работу, приведены в приложении 2 .ЦВ содержит усилитель А1 входного сигнала, интегратор, компаратор, триггеры Т1,Т2, одновибратор Ов ,логическую схему управления, источник опорного напряжения, генератор пуска , двоично-десятичный счетчик СТ с индикатором .В исходном состоянии RS- триггеры Т1 и Т2 находятся в состоянии «0» . Ключ К3 , управляемый инверсным выходом триггера Т2 , замкнут , и на выходе ОУ будет потенциал входа, близкий к нулю. Счетный вход СТ заперт сигналом 0 прямого выхода Т2 , и счетчик хранит результат предыдущего преобразования. Счетчик СТ устанавливается в состояние «0» сигналом ПУСК , который задерживается одновибратором Ов и поступает на вход S триггера Т2 , устанавливая его в состояние «1» . Это приводит к размыканию ключа К3 и отпиранию счетного входа СТ , который начинает считать импульсы генератора Гн тактовой частоты f t Входное измеряемое напряжение ,поступающее на вход интегратора через замкнутый ключ К2 , интегрируется .Интегрирование продолжается до переполнения счетчика СТ . Импульс переноса СТ устанавливает Т1 в «1» , размыкая тем самым К2 и замыкая К1.Опорное напряжение имеет противоположную полярность по отношению к измеряемому напряжению и выходное напряжение интегратора начинает изменяться в обратную сторону. Когда выходное напряжение интегратора станет равным U сравнения , компаратор срабатывает , и его выходной импульс устанавливает оба триггера в состояние «0». Схема приходит в исходное состояние.
Пусковой импульс
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() t
t
опорное напряжение
![]()
![]()
![]()
![]()
![]()
![]()
![]() t
t
![]()
![]() U1
U1
 выходное напряжение интегратора
выходное напряжение интегратора
![]()
![]()
![]() t
t
![]() Uсравнения
Uсравнения
![]()
![]()
![]()
![]() импульс компаратора
импульс компаратора
![]() t
t
t0 t1 t2 t3
импульс конец интервала
переполнения счета