| Скачать .docx |
Реферат: Разработка датчика перемещения с изменяющейся индуктивностью
Министерство общего и профессионального
образования РФ
Владимирский Государственный Университет
КУРСОВАЯ РАБОТА
ПО ТЕМЕ:
«Разработка датчика перемещения с изменяющейся индуктивностью.»
Выполнил:
Студентка гр МиС-296
Зайцева Т.А
Принял:
Мищенко З.В.
Содержание:
I. Разработка технического задания.
1.1. Назначение.
1.2. Условия эксплуатации.
1.3. Механические воздействия.
1.4. Эксплутационные требования.
II. РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ датчик перемещения с изменяющейся индуктивностью.
III. ПРИНЦЫП ДЕЙСТВИЯ датчика перемещения с изменяющейся индуктивностью.
IV. Расчет основных конструктивных элементов
V. Оценка метрологических характеристик.
5.1. Отнасительная погрешность.
5.2. Относительная чувствительность.
5.3. Определяем диапазон измерений.
VI. Расчет основных конструктивных элементов в MatCad.
Список литературы:
I. Разработка технического задания.
1.1. Назначение.
Датчик перемещения с изменяющейся индуктивностью предназначен для преобразования линейного перемещения в изменение индуктивности его обмоток.
1.2. Условия эксплуатации.
Климатические условия в рабочих условиях должны соответствовать ГОСТ 22261 или таблица № 1
Таблица №1
| Влияющие величины | Нормальное значение | Допустимое значение |
| Температура окружающей среды,°C | 20-25 | 2 |
| Атмосферное давление, кПа | 84-106,7 | - |
| Относительная влажность,% | 30-80 | - |
| Внешние магнитное поле | Практически отсутствует | Магнитное поле Земли |
| Напряжение питающей сети переменного тока, В | По ГОСТ21128 | ±10% |
| Частота питающей сети, Гц | 50 400 |
±0,5 ±10 |
Во время эксплуатации, датчик должен находится в обогреваемом и охлаждаемом помещение без непосредственного воздействия осадков, песка, пыли.
1.3. Механические воздействия.
Датчик перемещения с изменяющейся индуктивностью, во время работы должен быть устойчивым и прочным к воздействию однократных и многократных механических ударов.
Данные датчики должны сохранять свои характеристики при воздействии постоянных магнитных полей сетевой частоты с напряженностью до 400А/м.
1.4. Эксплутационные требования.
Безопасность эксплуатации датчика перемещения с изменяющейся индуктивностью должна обеспечиваться:
1)прочностью установленной в стандартах,
2)изоляцией электрических цепей,
3)надежным креплением при монтаже на объекте.
II. РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ датчик перемещения с изменяющейся индуктивностью.
Для получения выходного сигнала, индуктивный датчик должен быть включен в электрическую схему.

III. ПРИНЦЫП ДЕЙСТВИЯ датчика перемещения с изменяющейся индуктивностью.
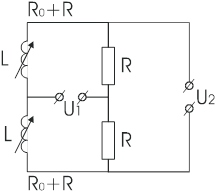
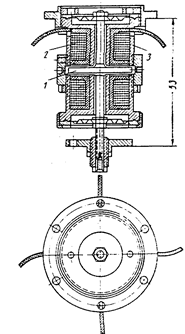
Действие датчика основано на преобразование линейного перемещения в изменение индуктивности его обмоток путем воздействия на подвижный элемент магнитной системы - якорь(1).Обмотки(2) датчика включены в фазочувствительный мост с выпрямителем, собранный по кольцевой схеме .(Рисунок 1)
 |
||
 |
||
Принцип действия индуктивного датчика основан на изменении
![]() индуктивной системы под воздействием входной величены. Индуктивность электромагнитной системы L определяется отношением потока сцепления к вызвавшему их I.
индуктивной системы под воздействием входной величены. Индуктивность электромагнитной системы L определяется отношением потока сцепления к вызвавшему их I.
В индуктивных датчиках изменяющимся параметром цепи является индуктивное сопротивление
 |
Lx- индуктивность датчика, изменяющаяся при перемещение подвижной системы датчика.
![]()
![]() Эти системы применяются лишь на переменном токе, величина которого будет изменяться при изменении
Эти системы применяются лишь на переменном токе, величина которого будет изменяться при изменении
 |
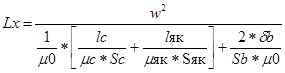
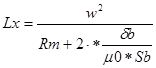
Индуктивность дроселя при ненасыщенном магнитопроводе может быть выраженна следующей формулой
Где w-число витков обмотки дросселя,
Rm-магнитное сопротивление сердечника и якоря,
![]() -длинна воздушного зазора,
-длинна воздушного зазора,
Sb- площадь поперечного сечения воздушного зазора.
 |
ля тока и тангенса угла сдвига фаз в цепи нагрузки имеем:
 |
где R-активное сопротивление обмотки дросселя
Zн - полное сопротивление нагрузки
![]()
![]() Таким образом, при изменении длинны или площади поперечного сечения Sb воздушного зазора будет изменяться величина тока и угол сдвига фаз между векторами напряжения и тока.
Таким образом, при изменении длинны или площади поперечного сечения Sb воздушного зазора будет изменяться величина тока и угол сдвига фаз между векторами напряжения и тока.
![]()
![]() Для определения пределов изменения тока в цепи нагрузки для магнитных систем при различных положениях якоря можно поступить следующим образом: амплитуда тока в цепи нагрузки Zн,
Для определения пределов изменения тока в цепи нагрузки для магнитных систем при различных положениях якоря можно поступить следующим образом: амплитуда тока в цепи нагрузки Zн,
 |
![]() может быть выражено через магнитную индукцию B как
может быть выражено через магнитную индукцию B как
таким образом,
![]()
![]() При определение магнитного потока
При определение магнитного потока![]() формула для индуктивности
формула для индуктивности
![]() имеет следующий вид:
имеет следующий вид:
 или
или
![]() Подставляя Im и умножая на ,находим:
Подставляя Im и умножая на ,находим:
 |
Наконец из выражения:
 |
![]()
Где Lc-средняя длинна магнитной силовой линии в сердечнике,
Sc-площадь поперечного сечения сердечника
Lяк- длинна пути магнитного потока в якоре
Sяк-площадь поперечного сечения якоря
![]()
![]() -магнитная проницаемость для сердечника при значении магнитной индукции Bm1
-магнитная проницаемость для сердечника при значении магнитной индукции Bm1
- ![]()
![]() магнитная проницаемость для якоря при значении магнитной индукции в якоре Bm2
магнитная проницаемость для якоря при значении магнитной индукции в якоре Bm2
![]()
![]()

Далее имеем
![]() Задаваясь значением Lx по формуле №1 определяется величина Bm и соответствующие ей значения , а затем по формуле №2
Задаваясь значением Lx по формуле №1 определяется величина Bm и соответствующие ей значения , а затем по формуле №2
![]()
![]() Либо в зависимости оттого,какая из этих величин изменяется при работе датчика.
Либо в зависимости оттого,какая из этих величин изменяется при работе датчика.
IV. Расчет основных конструктивных элементов
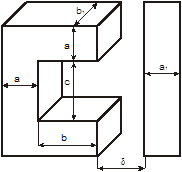 Дано:
Дано:
b1=0.01м
b=0.015м
а=0,01м
а1=а/2=0,005м
с=0,01м
![]() =0,0005м
=0,0005м
Определить индуктивность датчика
 |
![]()
Где
![]()
![]()
Значение -магнитной проницаемости в магнитопроводе- зависит от велечены индукции B.
B=(0.3-0.5)----B=0.3

-индукция в якоре
![]() Индукция в якоре Bmяк=0,6 соответствует =4340
Индукция в якоре Bmяк=0,6 соответствует =4340
Таким образом:
![]()

и следовательно при
 |
![]()
![]()
Если ,то число витков определяется как:
![]()
![]()
Где q-площадь поперечного сечения провода ,а f-коэффициент заполнения.
Следовательно:

![]()
![]()
![]() Для провода ПЭ ,а выберем тогда:
Для провода ПЭ ,а выберем тогда:
а
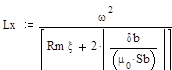
Для получения зависимости индуктивности датчика от величины воздушного зазора, может быть использовано следующие выражение:
 |
![]()
![]() Собственный коэффецент размагничивания
Собственный коэффецент размагничивания
![]()
![]() Наименьшая величина магнитопровода:
Наименьшая величина магнитопровода:
Определим наименьшую величину измерительного зазора:
 |
Где ,
![]()

![]() Так как а тогда:
Так как а тогда:
V. Оценка метрологических характеристик.
5.1. Отнасительная погрешность.
![]() Пусть
Пусть
![]()
![]() а ,тогда
а ,тогда
![]()

5.2. Относительная чувствительность.

![]()

![]()
5.3. Определяем диапазон измерений.
 |

VI. Расчет основных конструктивных элементов в MatCad.

Список литературы: