| Похожие рефераты | Скачать .docx |
Курсовая работа: Автоматическая система управления процессом передвижения пассажирского лифта
Курсовой проект
по дисциплине
«Комплексная автоматизация технологических процессов»
Автоматическая система управления процессом передвижения пассажирского лифта
2009
План
Введение краткий обзор существующих автоматизированных ситема управления (в том числе патентная информация) глубина патентной информации 5 лет. 4
1. Анализ технологического процесса как объекта управления. 8
1.1 Описание технологического процесса технологического оборудования. 8
1.2 Технологические схемы процесса и оборудования. 10
1.3. Классификация и перечень технологических переменных анализ взаимодействия между технологическими процессами. 12
1.4. Классификация и перечень измеряемых переменных состояния, определение требуемой точности измерения переменных технологического процесса. Определение условий работы измерительных устройств. 13
1.5 Классификация и перечень управляющих воздействий определение требуемой точности управления ТП. Определение условий работы силовых регулирующих устройств. 14
1.6 Определение основных требований к ведению технологического процесса, формулирование критерия качества и цели управления. 14
2. Разработка и выбор элементов АСУ ТП. 17
2.1 Разработка общих алгоритмов функционирования АСУ технологическим процессом. Блок схемы алгоритмов и их описания. 17
2.2 Функциональная структура системы управления ТП описание функциональных блоков системы. 21
2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ. 22
2.4 Блок схемы аппаратных средств уровней системы. Выбор аппаратных средств на всех уровнях управления. Вариант принципиальной схемы соединения между аппаратными блоками системы. 25
2.5 Выбор общего и специального программного обеспечения на всех уровнях АСУ ТП. 26
2.6 Принципы обмена информацией между уровнями системы. Выбор интерфейсных устройств и протоколов обмена. 26
3. Математическое моделирование системы управления технологическим процессом. 27
3.1 Выбор среды моделирования и разработка математической модели технологического процесса и технологического оборудования с исполнительными электроприводами. 27
3.2 Структура и параметрический синтез регуляторов системы управления ТП. 35
3.3 Компьютерное моделирование алгоритмов управления. Графическое представление результатов моделирования. 43
Заключение. 46
Литература. 47
Сегодня уже трудно представить себе российский город без работающего вертикального транспорта. Для огромного количества людей нормальная работа лифтового хозяйства является синонимом нормальной жизни. Качественная работа лифтов и подъемных механизмов и их надежность остается одним из ключевых аспектов в деле обеспечения безопасности жилых и общественных зданий, поэтому необходимо непрерывное развитие и модернизация лифтового оборудования.
Лифт – механизм вертикального транспорта, предназначенный для транспортировки пассажиров и грузов в жилых и производственных помещениях. Широкое распростронение использования лифтового электропривода в промышленности и в повседневной жизни, определяет лифт как наиболее распространненый вид вертикального транспорта.
Наблюдаемая в последнее время тенденция к повышению этажности зданий в городах, а также к комфорту передвижения в лифтах ведёт к усложнению систем управления процессом передвижения. Благодаря развитию современных микропроцессорных систем управления данные задачи успешно решаются в настоящее время.
Современный лифт – это сложное электромеханическое устройство, работающее в полуавтоматическом режиме по установленной программе. Программа работы лифта определяется дейтсвиями пассажиров, местонахождением и положением (свободна или занята) кабины и регламентируется при помощи системы управления лифтом.
Система управления лифтом должна решать задачи безопасного и комфортного передвижения пасажиров. Передвижение должно осуществяться с допустимым ускорением, требуемой скоростью и отсутствие ощутимых рывков. Для выполнения приведённых требований необходимо получать информацию о положении и скорости движения кабины с помощью различных датчиков.
Большое внимание необходимо уделить вопросу безопасности передвижения в случаях пожаров и землятресений, обрыва канатов, срабатывания ловителей.
Современные тенденции развития электропривода лебёдки и лифтового оборудования направлены в сторону отказа от машинного помещения и создания автономной конструкции лифта. То есть лифт содержит в себе все механизмы предвижения включая лебёдку.
Так патент №2352514 выданный фирме Коне Корпорейшн в 21.01.2004 содержит следующее описание:
Изобретение касается лифта, который предпочтительно выполнен без машинного отделения. Лебедка лифта взаимодействует с подъемными канатами посредством канатоведущего шкива, при этом указанные канаты имеют несущую часть, сплетенную из стальной проволоки круглого и/или некруглого поперечного сечения, и удерживают противовес и кабину лифта, перемещающиеся по своим направляющим. Вес лебедки не более составляет приблизительно 1/5 веса номинальной нагрузки лифта. Внешний диаметр канатоведущего шкива, приводимого в действие лебедкой лифта, составляет не более приблизительно 250 мм, а кабина лифта и противовес подвешены с использованием нескольких проходов подъемного каната. Изобретение позволяет уменьшить размеры и/или вес ли
Также следует отметить немаловажную роль способности системы управления остановить кабину с точностью на заданном уровне. Патент № 2202508 выданный Лаврову В.В. 20.03.2005, описывающий способ точной остановки пола кабины лифта на уровне посадочной площадки.
Изобретение относится к лифтостроению, в частности к способам, обеспечивающим точность остановок кабин пассажирских лифтов. Способ точной остановки пола кабины лифта на уровне посадочной площадки заключается в том, что система управления лифтом вырабатывает команды, подаваемые на исполнительное устройство, которым является тормоз лебедки, используя сигналы, поступающие от датчиков в шахте для затормаживания объекта регулирования лифта, фиксирует с помощью измерительного элемента положение кабины лифта и по результатам измерения вырабатывает команду на обеспечение воздействия исполнительного механизма на объект регулирования. При этом объектом регулирования, на который оказывает воздействие исполнительный элемент, является пол кабины, совмещенный с ее порогом и отделенный от этой кабины, а воздействие упомянутого исполнительного механизма, размещенного на самой кабине, осуществляется с возможностью выравнивания уровня пола кабины с уровнем порога дверей шахты выбранной посадочной площадки и происходит при неподвижной кабине лифта за время, не превышающее времени открытия дверей кабины и шахты на выбранной посадочной площадке при получении соответствующего сигнала измерительного элемента. Сигнал на время включения исполнительного механизма, определяющий расстояние, на которое необходимо переместить пол кабины, вырабатывается устройством сравнения, которое сопоставляет сигнал с измерительного элемента с сигналом, записанным в запоминающем устройстве и характеризующим точное местоположение порога дверей шахты выбранной посадочной площадки, и сигналом с датчиков-ограничителей, контролирующих высоту подъема пола. Изобретение обеспечивает повышение точности остановки кабины относительно посадочной площадки
В настоящее время в нашей стране стоит проблема замены устаревшего лифтового оборудования. Замены редукторного электропривода с релейно-контакторной системой управления. Целесообразно использовать существующего шахтного оборудования и проводки, произвести замену лишь системы управления и приводные механизмы дверей и лебёдки лифта.
Также следует обратить внимание на использование системы управления не только для модернизации существующего лифтового оборудования, но и использование в новом строительстве.
Отсюда следует, что использование для модернизации существующего оборудования линейных двигателей или расположения электропривода на кабине лифта будет требовать существенных денежных затрат. Поэтому следует обратить внимание на безредукторный электропривод. Исключение из конструкции лифтовой лебёдки редуктора и использование в качестве приводного двигателя высокомоментный асинхронный электродвигатель позволит решить задачу модернизации с наименьшими затратами.
Развитие высокомоментных двигателей позволило отказаться от использования дорогостоящего редуктора. Что позволило уменьшить шумы, улучшить согласованние с инерцией нагрузки и снизить стоимость системы электропривода лебёдки для лифтов различной конструкции.
Прямой (безредукторный) привод означает отсутствие элементов передачи мощности между двигателем и приводимой во вращение нагрузкой, что, в свою очередь, дает преимущества перемещения с высокой динамикой практически без люфта и превосходную жесткость при статических/динамических нагрузках.
1. Анализ технологического процесса как объекта управления
1.1 Описание технологического процесса технологического оборудования
Описание технологического процесса и оборудования
Основными частями лифта являются: лебёдка, кабина, противовес, направляющие для кабины и противовеса, двери шахты, ограничитель скорости, тяговые канаты и канат ограничителя скорости, узлы и детали приямка, электрооборудование и электроразводка. Основные параметры технической характеристики лифта: номинальная грузоподъёмность ![]() кг, масса противовеса
кг, масса противовеса ![]() кг, масса пустой кабины
кг, масса пустой кабины ![]() кг, номинальная скорость
кг, номинальная скорость ![]() . Лифт двенадцатиэтажного дома плюс этаж технического обслуживания. Расстояние между этажами 3м. Расчетная работа электропривода пуск раз в 3 минуты, 20 раз за час.Погрешность останова
. Лифт двенадцатиэтажного дома плюс этаж технического обслуживания. Расстояние между этажами 3м. Расчетная работа электропривода пуск раз в 3 минуты, 20 раз за час.Погрешность останова ![]() .
.
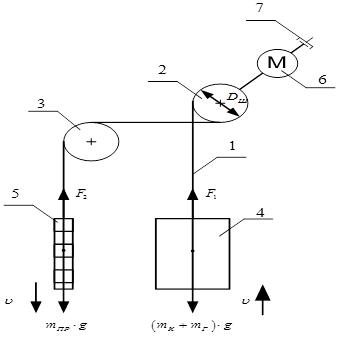
Рисунок 1 – Кинематическая схема лифта
Кинематическая схема лифта представлена на рисунке 1. Лифт имеет полиспастную подвеску с кратностью полиспаста 2, при которой тяговые канаты 1, сходящие с канатоведущего шкива 2, огибает полиспастный блок 3 на кабине 4 и противовесе 5 и крепятся к верхнему перекрытию шахты в машинном помещении.
Перемещение кабины и противовеса по направляющим осуществляется лебёдкой 6, установленной в машинном помещении, с помощью тяговых канатов 1. Там же размещены ограничители скорости, контроллер, вводное устройство. Лифт комплектуется специализированным контроллером.
При нажатии кнопки вызывного аппарата в электроаппаратуру управления лифтом подается электрический импульс (вызов). Если кабина находится на остановке, с которой поступил вызов, открываются двери кабины и шахты на данной остановке. Если кабина в другом месте, подается команда на её движение. В обмотку электродвигателя лебёдки и катушки электромагнитных тормозов подаётся напряжение, тормоза отпускают, и ротор электродвигателя приходит в движение.
При подходе кабины к требуемой посадочной площадке система управления лифтом по сигналу датчиков точной остановки переключает электродвигатель лебёдки на работу с пониженной частотой вращения ротора. Скорость движения кабины снижается, подаётся команда на остановку, и в момент, когда порог кабины совмещается с уровнем порога двери шахты, кабина останавливается, вступает в действие тормоз, включается в работу привод дверей, и двери кабины и шахты открываются. На лифте с системой управления от контроллера происходит бесступенчатое регулирование частоты вращения ротора двигателя посредством системы частотного регулирования, что обеспечивает плавные остановку и пуск кабины.
При нажатии кнопки приказа на панели управления, расположенной в кабине, закрываются двери кабины и шахты, кабина отправляется на посадочную площадку, кнопка приказа которой нажата.
После прибытия на требуемую посадочную площадку и выхода пассажиров двери закрываются, кабина стоит до тех пор, пока не будет нажата кнопка любого вызывного аппарата.
Движение кабины возможно только при исправности всех блокировочных и предохранительных устройств. Срабатывание любого предохранительного устройства приводит к размыканию цепи управления и остановке кабины.
1.2 Технологические схемы процесса и оборудования
Технологическая схема оборудования
Основу конструкции лифта составляет механизм подъёма на основе применения лебёдки с канатной системой передачи движения кабине.
Пассажиры перемещаются в специально-оборудованной кабине с закрываемыми дверями, которые имеют блокировочные устройства, исключающими возможность движения при открытых створках.
Для центрирования кабины и противовеса в горизонтальной плоскости и исключения поперечного раскачивания во время движения, применяются направляющие, устанавливаемые на всю высоту шахты лифта.
Направляющие обеспечивают возможность торможения кабины (противовеса) ловителями при аварийном превышении скорости и удерживают её до момента снятия с ловителей.
Пространство, в котором перемещается кабина и противовес ограждается на полную высоту и называется шахтой.
Помещение, в котором устанавливается подъёмная лебёдка и другое необходимое оборудование, называется машинным помещением.
Часть шахты, расположенная ниже уровня нижней посадочной площадки, образует приямок, в котором размещаются упоры или буферы, ограничивающие ход кабины (противовеса) вниз и останавливающие с допустимым ускорением замедления.
Для предотвращения аварийного падения кабины (противовеса) лифт оборудуется автоматической системой включения ловителей от ограничителя скорости, срабатывающей при аварийном превышении скорости.
Ловители устанавливаются по боковым сторонам каркаса кабины (противовеса) и приводятся в действие канатом, охватывающим шкив ограничителя скорости.
В приямке устанавливается натяжное устройство ограничителя скорости.
Станция управления работой лифта. приборы и аппараты находятся в машинном помещении.
Соединение электрического оборудования кабины со станцией управления обеспечивается посредством подвесного кабеля и жгута проводов, смонтированного в шахте.
Датчики замедления, шунты датчика точной остановки и устройства контроля шахтных дверей также устанавливаются в шахте.
На рисунке 2 представлена схема размещения оборудования лифта. Лебёдка и шкаф управления располагаются в лифтовом помещении, закрытом от проникновения посторонних лиц.
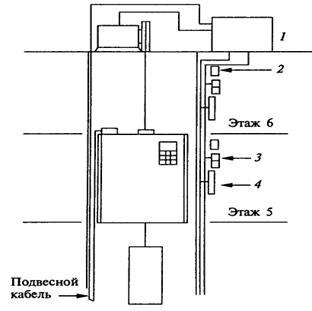
Рисунок 2 – Технологическая схема оборудования
Основная плата управления установлена в шкафу контроллера. Последовательная линия передачи данных подразделяется на каналы кабины и шахты. Канал кабины, к которому подключена клеммная коробка кабины, представляет собой подвесной кабель. На рисунке 2 приняты следующие обозначения: 1 – шкаф контроллера, 2 – позиционный индикатор, 3 – этажные кнопки, 4 – датчик положения кабины.
При управлении пассажирским лифтом система управления отслеживает и контролирует скорость передвижения кабины, положении кабины в шахте, загрузку кабины. В данном случаем технологическими переменными можно назвать изменяющуюся загрузку лифта и положение кабины. Так как кабина подвешена на металлических тросах обладающих конечной жесткостью, меняющейся в зависимости от положения кабины (чем ближе кабина к машинному помещению, тем больше жёсткость и наоборот), а также механическая система лифта является трёхмассовой. Из перечисленного следует, что взаимодействие технологических переменных и технологическим процессом передвижение кабины носит сложный характер и требует подробного изучения.
В зависимости от поступивших вызовов и приказов происходит управления оборудованием лифта по заданной программе.
Основными параметрами технической характеристики лифта являются: грузоподъёмность, скорость движения и высота подъема кабины. Они регламентируются Государственными Стандартами ГОСТ 22011-95 Лифты пассажирские и грузовые[1].
1.4 Классификация и перечень измеряемых переменных состояния, определение требуемой точности измерения переменных технологического процесса. Определение условий работы измерительных устройств
Практически все переменные состояния связаны с электроприводом лебёдки, перечислим основные из них:
меняющийся вес кабины в зависимости от количества пассажиров, следовательно меняющийся момент нагрузки на электроприводе лебёдки.
Положение кабины в шахте лифта, следовательно угол поворота шкива.
Изменяющиеся токи и напряжения на двигателе, которые поступают в систему управления преобразованными с помощью координатных преобразователей, для выработки управляющих воздействий на двигатель.
Скорость передвижения кабины – скорость вращения привода лифта.
Следовательно можно сделать вывод – для управления передвижением лифта необходимо управлять описанными выше переменными состояниями.
Основными требованиями к технологическому процессу передвижения лифта является движение с требуемой скоростью (1 м/с), ограничение ускорения (![]() ), и остановка кабины на уровне этажа (
), и остановка кабины на уровне этажа (![]() ). По ГОСТ 22011-95 точность измерения ускорения и скорости должна укладываться в пределы
). По ГОСТ 22011-95 точность измерения ускорения и скорости должна укладываться в пределы ![]() . За измерение положения кабины отвечают датчики расположенные в шахте лифта, необходимо согласовать их расположение с требуемой точностью останова кабины.
. За измерение положения кабины отвечают датчики расположенные в шахте лифта, необходимо согласовать их расположение с требуемой точностью останова кабины.
Условия работы измерительных устройств определяются ограничением температуры эксплуатации оборудования.
1.5 Классификация и перечень управляющих воздействий определение требуемой точности управления ТП. Определение условий работы силовых регулирующих устройств
Основные управляющие воздействия вырабатывает микропроцессорная система управления. Это задающие воздействия на используемые регуляторы. Но в конечном счёте управляющие воздействия направлены на управление двигателем с помощью изменения частоты питающего напряжения ![]() и самого напряжения
и самого напряжения![]() .
.
Преобразователем управляет логический контроллер обрабатывающий поступающие сигналы с постов вызовов и приказов на передвижение кабины лифта.
Также логическим контроллером выдаются сигналы на закрытие-открытие дверей кабины. Сигналы об случившейся аварии и сигнализация случившегося на пульте диспетчера.
Условия работы силовых регулирующих устройств: температура от 0 до +40 градусов.
1.6 Определение основных требований к ведению технологического процесса, формулирование критерия качества и цели управления
Основными задачами управления является обеспечение безопасного и комфортного передвижения в кабине лифта и произведение останова на требуемом уровне.
Критерии качества:
Плавность движения. По нормам ПУБЭЛ максимальная величина ускорения (замедления) кабины в нормальных эксплуатационных режимах для пассажирских лифтов не должна превышать ![]() .
.
При посадке кабины на ловители или буфер в аварийных ситуациях допускается ускорение до ![]() .
.
Эффект физиологического воздействия ускорений существенно зависит от времени их действия. Так, при времени действия ускорений менее ![]() , человеческий организм удовлетворительно переносит ускорения около
, человеческий организм удовлетворительно переносит ускорения около ![]() . Поэтому ПУБЭЛ допускает кратковременное превышение ускорений замедления кабины.
. Поэтому ПУБЭЛ допускает кратковременное превышение ускорений замедления кабины.
Комфортабельность условий перевозки пассажиров определяется минимальной величиной времени ожидания лифта на посадочной площадке, плавностью и точностью остановки, отсутствием шума и вибраций в кабине, наличием хорошей вентиляции салона и достаточной освещённости.
Улучшение комфортабельности способствует красивая отделка кабины с хорошо продуманной гаммой цветов, создающей эффект увеличения объёма салона кабины.
Снижение уровня электромагнитных помех может быть гарантировано хорошим качеством экранировки источников помех электрооборудования лифта и установкой высокочастотных фильтров во вводном устройстве электрической силовой цепи лифта.
Также необходимо сформулировать основные требования к электроприводу лифтов:
надежность в работе, обеспечение безопасности при пользовании лифтовой установкой;
малошумность
удобство и простота в эксплуатации и обслуживании;
ограничение ускорений кабины (по условиям комфортности для пассажирских лифтов и отсутствия проскальзывания каната относительно канатоведущего шкива для грузовых лифтов);
обеспечение плавных переходных процессов пуска и торможения при широких пределах изменения момента сопротивления;
наличие ревезионной пониженной скорости ![]()
обеспечение точности остановки кабины относительно уровня этажной площадки
оборудование лифтовой лебедки автоматически действующим тормозом нормально замкнутого типа.
2. Разработка и выбор элементов АСУ ТП
2.1 Разработка общих алгоритмов функционирования АСУ технологическим процессом. Блок схемы алгоритмов и их описания
Центральной частью блока управления является микропроцессор TMS320F2812 фирмы Texas Instruments «USA». В основу принципа работы электронного селектора положен метод тактового опроса всех устройств (датчиков), контролирующих положение кабины лифта в шахте, а также всех кнопок вызывных и приказных постов. К устройствам, контролирующим положение кабины в шахте, относятся датчики верхнего и нижнего этажей (ДВЭ и ДНЭ) датчик точной остановки ДТО, датчики замедления вверх ДчЗВв и вниз – ДчЗВн. Датчики ДТО, ДчЗВв и ДчЗВн установлены на кабине лифта. Они взаимодействуют с шунтами расположенными в шахте лифта в зонах замедления и точной остановки у каждой остановочной площадки (реализуется счётный принцип определения положения кабины в шахте).
Микропроцессор с помощью программы, записанной в запоминающем устройстве организует цикл из определенного количества тактовых импульсов, достаточного для опроса всех датчиков и кнопок вызова и приказа.
Счет этажей осуществляется микропроцессором при движении кабины вниз по сигналам от датчика замедления вниз, а при движении кабины снизу вверх – по сигналам от датчика замедления вверх.
Последовательность опроса устройств – строго определена. Микропроцессор чётко фиксирует номер импульса, который он посылает. За каждым номером импульса закреплено одно определенное устройство, вследствие чего микропроцессор «знает, какое устройство в данный момент опрашивает. Для выделения при действии тактового импульса опроса сигнала от соответствующего ему опрашиваемого устройства используются мультиплексоры (в блоке управления их несколько для обслуживания нужного количества опрашиваемых устройств). При этом на информационные выходы подключены выходы опрашиваемых устройств, а появление на его выходе одного из этих сигналов определяется подаваемым на адресные входы трёхразрядным двоичным кодом.
Двоичный код, управляющий работой мультиплексора, формируется на выходах двоичного счётчика. Тактовые импульсы поступают на счётчик с передающего выхода микропроцессора ТХД, т.е. на счётный вход счётчика последовательно подаются опросные импульсы. По окончании цикла опроса счётчик (в блоке 1 их два для подсчёта всего количества импульсов в цикле опроса) сбрасывается в исходное состояние.
Рассмотрим последовательность действия блока в момент включения лифта. После включения прежде всего в микропроцессор вводится число, определяющее этажность здания. Код этажности набирается на отдельном мультиплексоре на выводах которого при установке лифта набирается нужный двоичный код. Микропроцессор поочередно подключает выводы этого мультиплексора к своему входу INTO, который используется в данной схеме не как вход внешних прерываний, а как вход, предназначенный только для опроса количества этажей в здании.
После определения количества этажей лифт совершает калибровочный рейс на первый этаж при первом нажатии на любую кнопку вызова или приказа (если лифт не находится на первом этаже).
Если, например, при стоящей на первом этаже свободной кабине поступает вызов с первого этажа, то этот сигнал через мультиплексор 2 поступает на вход микропроцессора RXD – стандартный вход приемника сигналов. Микропроцессор составляет события, а именно то, что на запрос о состоянии вызывной кнопки первого этажа пришел импульс от этой кнопки, свидетельствующий о наличии вызова, и формирует на порте PO адрес, по которому из запоминающего устройства 4 поступают команды о дальнейших действиях, выявляется совпадение этажа вызова с этажом положения кабины, и на выходе RD микропроцессора формируется сигнал (в данной схеме выходы WR и RD используются как одиночные разряды порта, служащие для включения реле управления вверх и вниз, а также реле открывания дверей), который после усиления поступает на выход «откр.дверей».
Предположим, что пассажир вошел в кабину и нажал кнопку приказа пятого этажа. В цикле опроса за кнопки вызова и приказа пятого этажа отвечает в данном случае 13-й импульс. При появлении на выходе TXL микропроцессора 13-го по счету импульса он попадает на счётный вход счётчика 1, двоичный код на выходе которого включает канал мультиплексора 2, на входе которого подключен сигнал от кнопки приказа пятого этажа, и с выхода мультиплексора этот сигнал поступает на вход RXD приемника сигналов микропроцессора. Далее, как описано выше, микропроцессор обрабатывает этот сигнал и формирует сигнал на выходе WR, который после усиления поступает на выход «вверх» и обеспечивает включение реле управления вверх в релейной части схемы. При движении вверх счёт этажей осуществляется по датчикам замедления вверх. По прибытии на этаж назначения и выходе всех пассажиров из кабины в блок электронного селектора подается сигнал «Сброс», по которому снимаются сформированные ранее сигналы управления, и лифт готов к движению по вызову или приказу. При движении кабины лифта микропроцессор при помощи мультиплексоров непрерывно опрашивает датчики замедления вверх и вниз, датчик точной остановки, датчики крайних этажей, кнопки вызовов и приказов. Информация, поступающая от этих устройств, обрабатывается микропроцессором, который в соответствии с записанной в запоминающем устройстве программой формирует требуемые сигналы управления.
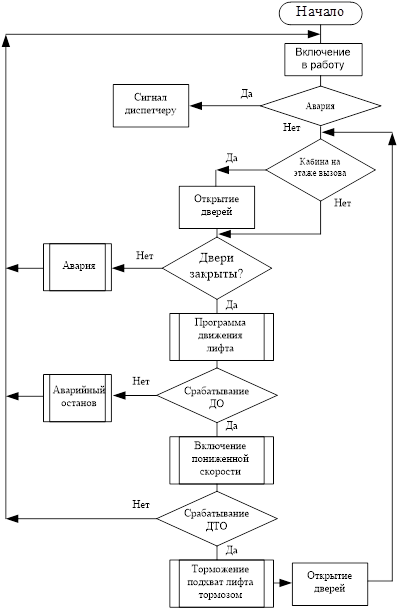
Рисунок 3 – Общий алгоритм функционирования системы управления пассажирским лифтом в режиме «Нормальная работа»
На рисунке 3 приведена блок-схема программы управления лифтом в режиме «Нормальная работа». При закрытых дверях с помощью программы, записанной в запоминающем устройстве, осуществляется опрос постов вызова, и при появлении вызова, проверяется условие нахождения кабины лифты на том же этаже вызова. Если это условие не выполняется, то осуществляется переход к программному блоку «Выбор направления», а при его выполнении формируется сигнал «Открыть дверь». После открывания дверей по завершении выдержки времени или при поступлении сигнала приказа обеспечивается закрывание дверей, решается задача выбора направления движения с учётом взаимного положения этажа назначения и этажа исходного положения кабины. В соответствии с результатами этого выбора включается привод для движения кабины в нужном направлении. В процессе движения кабины осуществляется проверка условия совпадения положения кабины с этажом назначения. При выполнении этого условия формируется сигнал замедления и остановки кабины, открываются двери, дальше управление осуществляется аналогично описанному.
Аналогичные программы формируются для обеспечения работы лифта в других режимах (с учётом особенностей работы в этих режимах). Правда, управление в «Режиме ревизии» обычно выполняют без участия микропроцессорной системы для обеспечения большей безопасности (алгоритм управления в этом режиме достаточно прост а возможность управления в крыши кабины не должна зависеть от работоспособности микропроцессорной системы). При использовании режима группового управления вводят дополнительные программные блоки, выполнение которых зависит от принятого при этом алгоритма управления.
2.2 Функциональная структура системы управления ТП описание функциональных блоков системы
Схема системы управления в режиме нормальной работы представлена на рисунке 4.
В схеме приняты следующие обозначения: ПЛ – привод лифта, ПД – привод дверей, ПВП – посты вызовов и приказов, УРПВ – узел регистрации приказов и вызовов, УВНД – узел выбора направления движения, УОПК – узел определения положения кабины, УЗО – узел замедления и остановки, ДПД – датчики положения дверей, ДСЛ – датчики состояния лифта, УБЗ – узел блокировок и защиты, УВВ – узел выдержки времени, УОЗД – узел открывания и закрывания дверей, ПСУ – позиционно-согласующие устройство, СВ – сигнал движения вверх, СН – сигнал движения вниз, СБ – сигнал большой скорости, СМ – сигнал малой скорости, СЗД – сигнал закрывания дверей, СОД – сигнал открывания дверей, СВВ – сигнал выдержки времени, СВП – сигналы о вызовах и приказах, СНПК – сигнал о наличии пассажира в кабине, СПЗК – сигнал о полной загрузке кабины, СПГЛ – сигнал о прегрузке кабины; СРРЛ –сигнал регулирования разгона лифта; УОЗК – узел определения загрузки кабины, СПК – сигнал положения кабины.
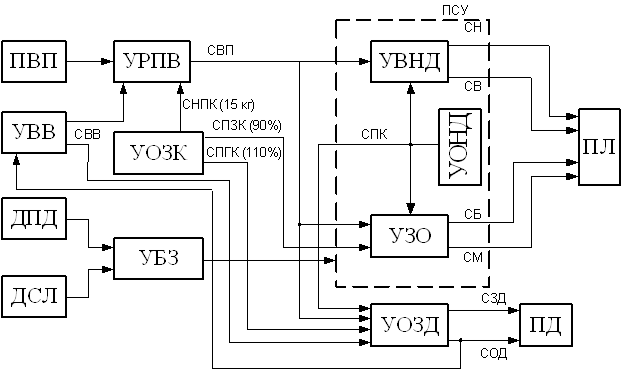
Рисунок 4 – Функциональная структура управления
2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ
Для управления технологическим процессом передвижения пассажирского лифта необходимо наличие трёх уровней управления.
Верхний уровень
В последнее время наблюдается тенденция к оснащению зданий сложным инженерным и коммуникационным оборудованием. Появляется необходимость вести наблюдение за основными системами жизнеобеспечения здания для предупреждения и быстрого реагирования на неисправности. Данную задачу позволяет решить автоматизированная система контроля, управления и диспетчеризации (АСКУД). Её также можно назвать как сервер ЖКХ. В частности для лифтового оборудования АСКУД позволяет:
контролировать положение кабины лифта в режиме реального времени
формировать отчеты о простоях, неисправностях, техническом обслуживании
контролировать доступ в шахту или машинное помещение
контролировать выход лифтового оборудования из строя
В диспетчерскую приходит вся информация с лифтов подключённых к системе. Диспетчер по полученным данным может направить бригаду на ремонт вышедшего из строя оборудования.
На базе обычной SCADA системы реализован диалог взаимодействия диспетчера и поступающих данных. Также ведётся журнал событий в течение месяца.
Средний уровень
На среднем уровне происходит реализация локальных управляющих алгоритмов (управление приводом);
взаимодействие между технологическими объектами управления;
информационный обмен с уровнем III.
Для реализации перечисленных функций применяем универсальный сервоконтроллер ELESY PCI-Servo 4 производства фирмы «ЭЛЕСИ» Россия.
Контроллер предназначен для измерения непрерывных сигналов, представленных напряжением постоянного тока и (или) постоянным током, сбора и обработки информации с первичных датчиков, формирования сигналов управления по заданным алгоритмам, приема и передачи информации по последовательным каналам связи в системах измерения, контроля и управления объектами.
Основная область применения – системы управления перемещением технологического оборудования в соответствии с заданной программой движения.
Нижний уровень
Нижний уровень АСУ ТП состоит из преобразователя частоты ESD-TCL фирмы «ЭЛЕСИ», который является специальной разработкой для управления безредукторным асинхронным приводом лифтовой лебёдки; источник питания Siemens LOGO для подачи напряжения питания 24В;
датчик положения, определяющий точное местонахождение кабины в шахте; два механических нормально замкнутых тормоза; посты вызовов и приказов; конечные выключатели «верхний этаж» и «нижний этаж».
На дискретные входы сервоконтроллера подаются команды с постов вызовов и приказов, сигналы о нахождении лифта в верхнем и нижнем положении в шахте, сигналы открывания закрывания дверей кабины лифта, сигналы аварий.
2.4 Блок схемы аппаратных средств уровней системы. Выбор аппаратных средств на всех уровнях управления. Вариант принципиальной схемы соединения между аппаратными блоками системы
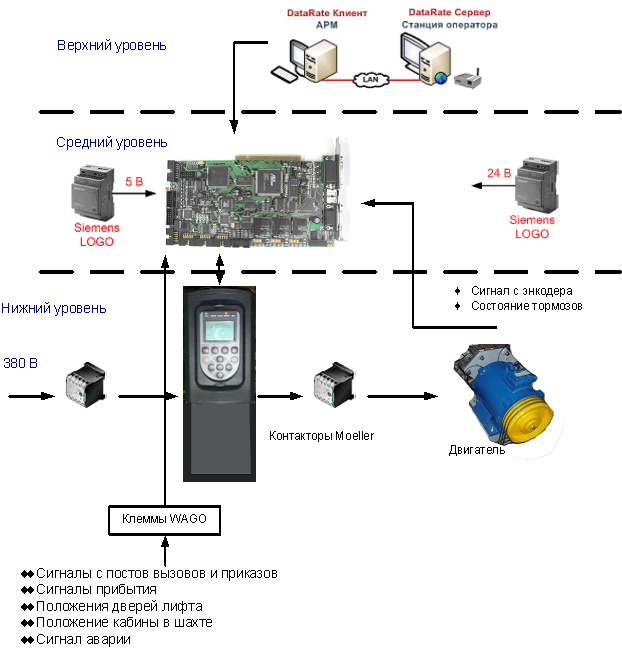
Рисунок 5 - Блок-схема соединения аппаратных средств уровней управления АСУ ТП
2.5 Выбор общего и специального программного обеспечения на всех уровнях АСУ ТП
Для сервоконтроллера ELESY PCI-Servo 4 используется следующее программное обеспечение.
Драйвер под Windows XP/2000/NT.
Утилита для конфигурирования параметров сервоконтроллера с возможностью тестирования периферии.
DLL библиотека с поддержкой набора функций управления сервоконтроллером.
Примеры программирования сервоконтроллера на Borland Delphi, C++ Builder.
Преобразователь частоты реализует векторное управление двигателем, программа работы написана в среде Code Composer Studio v3.1.
2.6 Принципы обмена информацией между уровнями системы. Выбор интерфейсных устройств и протоколов обмена
Обмен информацией между верхним (АРМ оператора) и средним уровнем осуществляется посредством локальной сети PROFIBUS-DP по интерфейсу RS-485.
3. Математическое моделирование системы управления технологическим процессом
Моделирование работы технологического процесса будем проводить в среде MATLAB Simulink, обладающей широкими возможностями выполнения математического моделирования, создавая модель из простых блоков. Также в среде Simulink содержаться блоки, которые позволяют визуализировать процессы моделирования.
Математическое описание процессов в асинхронном двигателе
Математическое описание АД должно отражать особенности эксплуатационных режимов работы нагрузочного моментного ЭП в составе испытательного стенда. Кроме того, в дальнейшем данная имитационная модель рассматривается как объект оптимального управления, на основании которого выполняется структурно-параметрический синтез системы векторного управления АД.
При составлении уравнений электрического равновесия в обмотках АД возьмём за основу систему уравнений для трёхфазной электрической машины и ряд допущений, общепринятых в теории электрических машин переменного тока:
параметры обмоток всех фаз имеют одинаковые значения, т.е. имеет место симметричный режим работы;
магнитное поле электрической машины имеет синусоидальное распределение вдоль воздушного зазора;
принимаем напряжения на выходе ПЧ синусоидальной формы, заведомо не учитывая взаимного влияния между АД и ПЧ по силовому каналу;
не учитываются потери в стали, вызываемые протеканием вихревых токов в магнитопроводе двигателя и его перемагничением;
насыщение магнитной цепи АД не учитывается благодаря наложению ограничений на статорные токи;
эффект вытеснения токов в проводниках ротора пренебрежимо мал ввиду того, что частота токов ротора при питании от ПЧ ограничена рабочим участком механической характеристики.
На основании второго закона Кирхгофа и с учётом вышеприведённых допущений, уравнения для ЭДС в обмотках статора и ротора АД можно представить в следующем виде:
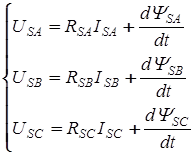 (2.1)
(2.1)
для цепей статора и
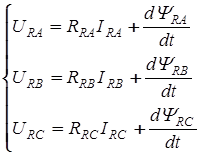 (2.2)
(2.2)
для цепей ротора.
В представленных системах уравнений приняты следующие обозначения:
![]() =
=![]() =
=![]() =
=![]() – активные сопротивления фаз статора;
– активные сопротивления фаз статора;
![]() =
=![]() =
=![]() =
=![]() – активные сопротивления фаз ротора;
– активные сопротивления фаз ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – мгновенные фазные напряжения статора и ротора;
– мгновенные фазные напряжения статора и ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – мгновенные фазные токи в обмотках статора и ротора;
– мгновенные фазные токи в обмотках статора и ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – потокосцепления обмоток статора и ротора.
– потокосцепления обмоток статора и ротора.
Для связи между потокосцеплениями и токами в обмотках воспользуемся законом Ампера, тогда:
 (2.3)
(2.3)
для статора
 (2.4)
(2.4)
для ротора.
Уравнения потокосцеплений показывают зависимость от токов в каждой обмотке через взаимоиндукцию. В уравнениях (2.3 и 2.4) коэффициенты ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() являются собственными индуктивностями соответствующих обмоток, все остальные – индуктивности между соответствующими обмотками.
являются собственными индуктивностями соответствующих обмоток, все остальные – индуктивности между соответствующими обмотками.
Не забывая о том, что системы уравнений (2.1 – 2.4) связывают исключительно скалярные величины, выражение для электромагнитного момента представим в следующем виде [60]:
 ,(2.5)
,(2.5)
где ![]() это число пар полюсов рассматриваемого АД.
это число пар полюсов рассматриваемого АД.
На основании второго закона Ньютона представим уравнение для движения и равновесия моментов на валу АД:
![]() ,(2.6)
,(2.6)
где ![]() – момент инерции на валу АД,
– момент инерции на валу АД, ![]() – угловая частота вращения ротора,
– угловая частота вращения ротора, ![]() – момент развиваемый АД и
– момент развиваемый АД и ![]() – момент приложенный к валу двигателя со стороны нагрузки.
– момент приложенный к валу двигателя со стороны нагрузки.
Изначально АД является трёхфазной электрической машиной с неявнополюсным ротором. Анализируя режимы работы АД в составе нагрузочного моментного ЭП и совокупность принятых выше допущений можно предположить правомерность использования для математического описания эквивалентной двухфазной модели.
На пути упрощения математического описания АД оказался подходящим метод пространственного вектора, позволяющий существенно упростить и сократить вышеприведённую систему уравнений; метод позволяет связать уравнения (2.1 – 2.6) в единую систему с векторными переменными состояния. Суть метода состоит в том, что мгновенные значения симметричных трёхфазных переменных состояния (напряжение, токи, потокосцепления) можно математически преобразовать так, чтобы они были представлены одним пространственным вектором.
Представим систему уравнений с векторными переменными состояния для случая с произвольной ориентацией системы координат [21, 36]:
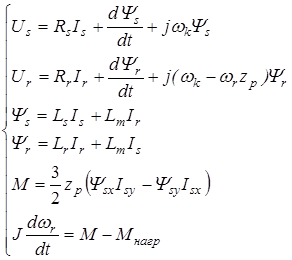 (2.7)
(2.7)
Здесь ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() - двухэлементные векторы напряжений, токов и потокосцеплений, представленные в произвольно ориентированной ортогональной (двухфазной) системе координат в виде составляющих по координатным осям. Переменная
- двухэлементные векторы напряжений, токов и потокосцеплений, представленные в произвольно ориентированной ортогональной (двухфазной) системе координат в виде составляющих по координатным осям. Переменная ![]() служит для задания произвольной частоты вращения координатной системы. Вспомогательная матричная константа j служит для «переворота» компонентов векторных переменных и позволяет упростить форму записи системы уравнений.
служит для задания произвольной частоты вращения координатной системы. Вспомогательная матричная константа j служит для «переворота» компонентов векторных переменных и позволяет упростить форму записи системы уравнений.
Раскрывая содержание пространственных векторов, получаем следующее:
 ,
, ,
, ,
, ,
,
 ,
,  ,
,  .(2.8)
.(2.8)
Система координат с принудительной ориентацией по вектору потокосцепления ротора
При решении задач разработки систем управления для АД необходимо рассматривать его имитационную модель с позиций объекта оптимального управления. В теории систем управления асинхронными электроприводами при моделировании АД нашел место уникальный принцип ориентации системы координат по вектору потокосцепления ротора. В данном случае имитационная модель АД приобретает определенное сходство со структурной схемой машины постоянного тока, где возможно раздельное управление магнитным состоянием и моментом на валу двигателя.
Математически условие ориентации применительно выражается следующим образом:
![]() ;
; ;
;![]() .
.
Уравнения, описывающие АД в системе координат с принудительной ориентацией по вектору потокосцепления ротора.

В системе ![]() представляет собой скольжение системы координат, а
представляет собой скольжение системы координат, а ![]() соответственно скорость её вращения. Данные параметры определяются в соответствии со следующими выражениями:
соответственно скорость её вращения. Данные параметры определяются в соответствии со следующими выражениями:
 ;
;![]() .
.
В системе уравнений переменные с индексами «x» и «y» соответствуют компонентам пространственного вектора в координатной системе с ориентацией по вектору потокосцеплений ротора ![]() . С помощью правил создания и преобразования структурных схем, принятых в теории автоматического управления , представим систему уравнений в виде структурной схемы. На рис. представлена структурная схема, имитационной модели АД в системе координат с ориентацией по вектору потокосцепления ротора
. С помощью правил создания и преобразования структурных схем, принятых в теории автоматического управления , представим систему уравнений в виде структурной схемы. На рис. представлена структурная схема, имитационной модели АД в системе координат с ориентацией по вектору потокосцепления ротора ![]() .
.
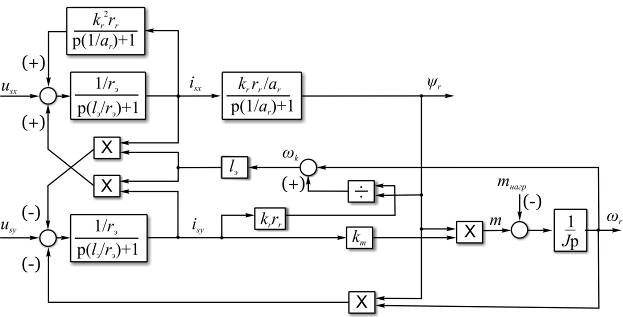
Рисунок 6 - Структурная схема имитационной модели АД в системе координат с ориентацией по вектору потокосцепления ротора ![]()
Модель АД, представленная на рис. удобна для реализации и расчёта в любом из прикладных программных продуктов, поддерживающих объектно-структурное моделирование систем (Simulink-Matlab, Windora и т.д.). Для исследования и проверки адекватности созданной модели АД удобно выполнить её реализацию в среде Simulink-Matlab. В данной системе симметричные трёхфазные напряжения, представленные в относительных единицах подвергаются преобразованию Кларка и поступают в виде компонентов пространственного вектора напряжений ![]() и
и ![]() на входы координатного преобразователя Парка-Горева. Формулы для координатного преобразования Парка-Горева, позволяющего реализовать переход от стационарной системы координат к вращающейся представлены ниже:
на входы координатного преобразователя Парка-Горева. Формулы для координатного преобразования Парка-Горева, позволяющего реализовать переход от стационарной системы координат к вращающейся представлены ниже:
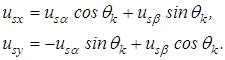
Здесь ![]() ,
, ![]() - составляющие пространственного вектора напряжения статора
- составляющие пространственного вектора напряжения статора ![]() , представленные в стационарной системе координат;
, представленные в стационарной системе координат;
![]() ,
, ![]() - составляющие вектора напряжения статора
- составляющие вектора напряжения статора ![]() , представленные во вращающейся системе координат;
, представленные во вращающейся системе координат;
![]() - угол поворота вращающейся координатной системы (угол ориентации). Параметр
- угол поворота вращающейся координатной системы (угол ориентации). Параметр ![]() связан с угловой скоростью вращения координатной системы
связан с угловой скоростью вращения координатной системы ![]() благодаря следующему выражению:
благодаря следующему выражению:
![]() .
.
Графически преобразование Парка-Горева иллюстрируется на рис.
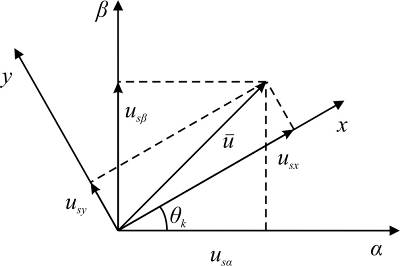
Рис. График преобразований Парка-Горева для связи между вращающейся и стационарной системой координат
Координатный преобразователь Парка-Горева сориентирован совместно с системой координат разработанной имитационной модели АД. Благодаря этому на входы модели по напряжению ![]() и
и ![]() поступают компоненты пространственного вектора напряжения, представленного во вращающейся системе координат.
поступают компоненты пространственного вектора напряжения, представленного во вращающейся системе координат.
3.2 Структура и параметрический синтез регуляторов системы управления ТП
Синтез регуляторов производился из стандартной методики настройки контуров на модульный или симметричный оптимум. Далее приведём лишь передаточные функции регуляторов и краткое описание контуров.
Контур тока.
Настройка контура тока проводилась на модульный оптимум с помощью ПИ-регулятора.
Передаточная функция ПИ-регулятора тока
 .
.
Коэффициент усиления регулятора тока:
 ,
,
где
коэффициент ОС по току.
![]() - коэффициент оптимизации.
- коэффициент оптимизации.
Постоянная времени регулятора тока:
![]()
Настройка контура близка к настройке на модульный оптимум (МО) системы 2-го порядка. Контур является астатической системой 1-го порядка по управлению.
Контур потокосцепления.
При оптимизации контура потокосцепления внутренний оптимизированный замкнутый контур тока представлен усеченной передаточной функцией 1-го порядка.
Передаточная функция ПИ-регулятора потокосцепления

Коэффициент усиления и постоянная времени регулятора потокосцепления определяются по выражениям

где
![]()
![]() - коэффициент оптимизации.
- коэффициент оптимизации.
Настройка контура близка к настройке на модульный оптимум системы второго порядка. Контур является астатической системой регулирования первого порядка по управлению и обеспечивает нулевую установившуюся ошибку ![]() .
.
Контур скорости.
При оптимизации контура скорости внутренний оптимизированный замкнутый контур тока представлен усеченной передаточной функцией 1-го порядка.
Передаточная функция ПИ-регулятора:

Коэффициент усиления и постоянная времени регулятора скорости определяются по выражениям:
Оптимизированный контур при отработке ступенчатых управляющих воздействий обеспечивает высокое быстродействие при перерегулировании в общем случае более 43%. Настройка контура без фильтров на входе близка к настройке на СО.
Для ограничения перерегулирования на уровне около 8,1 % на входе контура скорости включены два одинаковых фильтра.
Нелинейная система.
Дальнейшее моделирование проводилось с учётом основных нелинейностей – насыщение регуляторов, ограниченное напряжение преобразователя.
К нелинейной системе для регулирования скорости предъявляются следующие требования:
Постоянная скорость вращения равная ![]() , что соответствует линейному движению кабины со скоростью
, что соответствует линейному движению кабины со скоростью ![]() .
.
Ограничение ускарения. Ускорение должно быть ![]() .
.
Чтобы выполнить выдвинутые требования необходим задатчик интенсивности, с помощью которого установим время разгона до рабочей скорости.
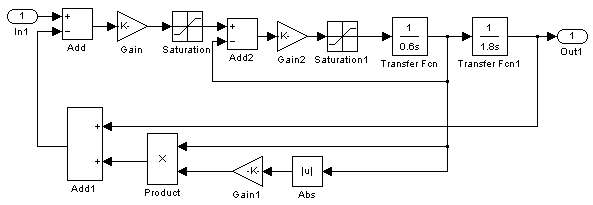
Рисунок 0.6 - Имитационная модель S-образного задатчика интенсивности в среде Simulink
Пусть время разгона будет 2,4 с.
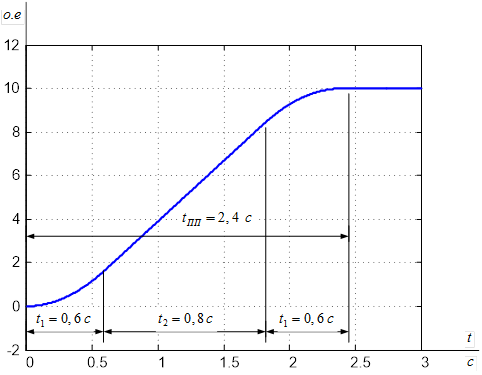
Рисунок 8 - – Переходная характеристика S-образного задатчика интенсивности.
Имитационная модель РЭП в среде Simulink представлена на рисунке 9. Переходные характеристики полученные при моделировании представлены на рисунке 10.
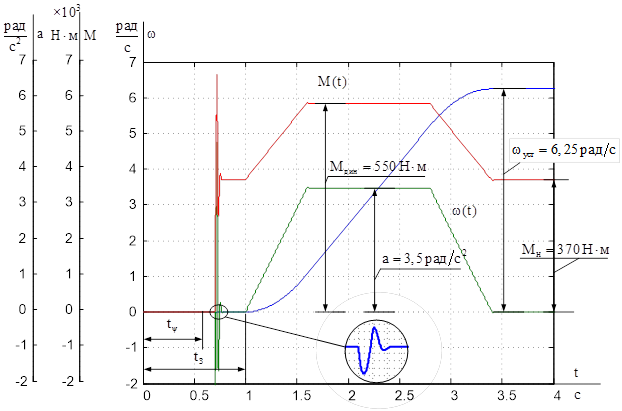
Рисунок 10 – Переходные характиристики нелинейной системы РЭП ![]() ,
, ![]() ,
, ![]()
Ускорение ограничено на уровне ![]() , что соответствует линейному ускорению
, что соответствует линейному ускорению ![]() .
.
В САУ СЭП при использовании пропорционального регулятора в позиционных режимах наблюдается перерегулирование, что критично для управления позиционирования кабины лифта. С целью оптимизации переходных процессов применяют регулятор положения с нелинейной характеристикой. В простейшей схеме второго порядка с ограничением момента (тока) двигателя это парабола.
Параболический регулятор.
Характеристику регулятора положения задаем в виде кусочно-линейной функции имеющей параболический вид:
где

Определим точки линейного участка характеристики ![]() регулятора положения из выражения:
регулятора положения из выражения:
![]() ,
,
где ![]() - коэффициент усиления регулятора положения.
- коэффициент усиления регулятора положения.

,где n = 4, находим точку пересечения, где линейная характеристика регулятора переходит в плавное возрастание
Таблица 3 - Характеристика ![]()
| -10 | -8 | 6 | -4 | -2 | -0,855 | 0,855 | 2 | 4 | 6 | 8 | 10 |
| -1566,4 | -1002,5 | -563,9 | -250,6 | -62,7 | -11,5 | 11,5 | 62,7 | 250,6 | 563,9 | 1002,5 | 1566,4 |
Рассмотрим отработку задания на передвижение на расстояние пятого этажа в одномассовой механической системе. С учётом расстояния между этажами равным 3 метра, задание составит 15000. Полученные переходные характеристики представлены на рисунке 11.
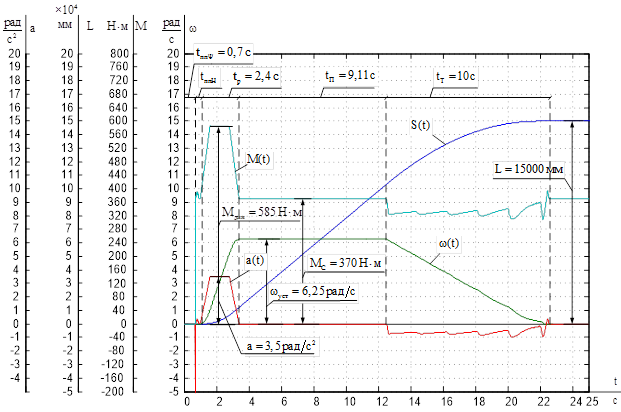
Рисунок 11 - Переходные характиристики нелинейной системы СЭП ![]() ,
, ![]() ,
, ![]() ,
, ![]()
Затягивание скорости торможения вызвано работой параболического регулятора а также коррекцией интегрального насыщения в используемых нелинейных регуляторах. Переходный процесс по положению проходит без перерегулирования и статическая ошибка равна нулю.
Для моделирования алгоритмов управления воспользуемся расширением MATLAB Simulink Stateflow. Данный пакет представляет собой графическую среду проектирования и моделирования схем с логическими переходами.

Рисунок 12 – Диалоговое окно приложения Statflow и модель алгоритма управления
Представленная модель работы системы позволяет управлять движением вниз(running_back), вверх(running_forward). При достижении заданного уровня отдавать сигнал открытия дверей(op). При начале движения производят закрытие дверей (cl).
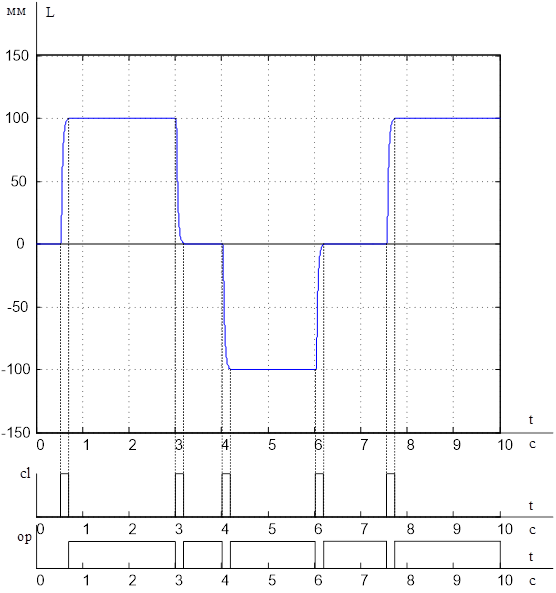
Рисунок 13 – Графическое представление работы системы управления
На рисунке 13 представлены результаты моделирования работы системы управления.
Разработанная система управления не осуществляет в полной мере все необходимы функции управления для передвижения пассажирским лифтом. В магистерской диссертации планируется продолжить работу над созданием системы управления, которая бы полностью могла управлять передвижением, включая все виды защит и переключение на пониженную скорость при срабатывании датчика остановки.
В представленном курсовом проекте была спроектирована автоматизированная система управления передвижения пассажирского лифта.
Целью работы было получение начальных навыков проектирования автоматизированных систем управления электроприводов.
Разрабатываемая система управления позволит модернизировать устаревшие системы управления пассажирских лифтов и использовать данную систему во вновь строящихся зданиях. Также данная система построена на микропроцессорной системе управления, позволяющей значительно улучшить качество управления.
Система управления лифтовой лебёдки реализована на базе безредукторного асинхронного двигателя ЧРАД200S8 с векторным управлением.
В ходе выполнения работы были выбраны аппаратные средства на среднем и нижнем уровне управления. Произведёт выбор программного обеспечения для программирования логического контроллера и преобразователя частоты.
1. Антропов А.А., Гарганеев А.Г., Каракулов А.С., Ланграф С.В., Нечаев М.А. Опыт разработки преобразователя частоты для асинхронного электропривода общепромышленного применения//Электротехника. № 9. 2005. С.23-26
2. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392 с.
3. Белов М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: Учебник для вузов – М.: Академия, 2004. – 576 с.
4. Бесекерский В.А., Попов Е.В. Теория систем автоматического управления. Изд. 4-е, перераб. и доп. – СПб, Изд-во «Профессия», 2004. – 752с.
5. Ключев В.И. Теория электропривода: Учеб. для вузов. – 2-е изд.перераб.и доп. – М.: Энергоатомиздат, 2001. – 704 с.
6. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока/ Пер. с нем. М. Л.: Госэнергоиздат, 1963. 735 с.
7. Копылов И.П. Математическое моделирование электрических машин. – М.: Высшая школа, 2001. – 274 с.
8. Удут Л.С., Мальцева О.П., Кояин Н.В. Проектирование и исследование автоматизированных электроприводов. Часть 1. – Введение в технику регулирования линейных систем. Часть 2. – Оптимизация контура регулирования: Учебное пособие. – Томск: Изд. ТПУ, 2000. -144.
9. Удут Л.С., Мальцева О.П., Кояин Н.В. Проектирование и исследование автоматизированных электроприводов. Часть 6. – Механическая система электропривода постоянного тока: Учебное пособие. – Томск: Изд. ТПУ, 2004. -144с.
10. Чернышев А.Ю., Ланграф С.В., Чернышев И.А. Исследование систем скалярного частотного управления асинхронным двигателем: методические указания к выполнению лабораторных и практических работ по курсу "Электропривод переменного тока" для студентов специальности 180400. Томский политехнический университет. — Томск : Изд-во ТПУ, 2002. – 23 с.
11. Энергосберегающий асинхронный электропривод: Учеб. пособие для студ.высш. учеб. заведений / И.Я. Браславский, З.Ш. Ишматов, В.Н. Поляков; под ред. И.Я. Браславского.– М.: Издательский центр «Академия», 2004. – 256с.
Похожие рефераты:
Анализ и планирование финансово-хозяйственной деятельности предприятия (на примере МП "Лифт-Сервис")
Строительные Нормы и Правила (СНиП 2.08.02-89*)
Автоматизация теплового пункта гражданского здания
Автоматизация процесса подготовки шихты
Автоматическая система управления процессом испытаний электропривода лифтов
Разработка электроприводов прессовых машин
Испытательная станция турбовинтовых двигателей ТВ3–117 ВМА–СБМ1 серийного производства
Анализ технологии гостиничного хозяйства и организации труда гостиницы
Расширение филиала "Шахта "Осинниковская" за счет ввода в отработку запасов филиала "Шахта "Тайжина"
Разработка электропривода лифта
Автоматизированный электропривод центрифуги
Автоматизированный электропривод грузового лифта
Автоматизированная система управления компрессорной установки