| Скачать .docx |
Курсовая работа: Координатно-расточные станки
Содержание
Введение
1. Устройство и принцип действия координатно-расточных станков
2. Расчет критериев
2.1 Критерии развития технических объектов
2.2 Расчет критериев
2.3 Определение изменения критериев
3. Перспективы развития координатно-расточных станков
Заключение
Список литературы
Введение
Расточные станки предназначаются для обработки деталей в условиях единичного и серийного производства. Это широкоуниверсальные станки, на которых можно производить черновое и чистовое растачивание отверстий, обтачивание наружных цилиндрических поверхностей и торцов отверстий, сверление, зенкерование и развёртывание отверстий, фрезерование плоскостей, нарезание резьбы и другие операции. Большое разнообразие различных видов обработки, производимой на расточных станках, позволяет в ряде случаев проводить полную обработку детали без перестановки её на другие станки, что особенно важно для тяжёлого машиностроения.
Характерной особенностью расточных станков являются наличие горизонтального (или вертикального) шпинделя, который совершает движение осевой подачи. В шпинделе крепится режущий инструмент – борштанга с резцами, сверло, зенкер, фреза, метчик и др. Широкое применение получают расточные станки с программным управлением, сокращающим время их переналадки, повышающим производительность труда и качество обработки.
В зависимости от характера выполняемых операций, назначения и конструктивных особенностей расточные станки подразделяют на универсальные и специализированные. В свою очередь, универсальные станки разделяются на горизонтально-расточные, координатно-расточные и алмазно-расточные (отделочно-расточные). Для всех типов станков наиболее существенным параметром, определяющим все основные размеры станка, является диаметр расточного шпинделя.
1. Устройство и принцип действия координатно-расточных
станков
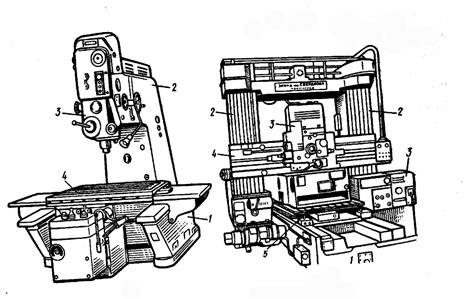
Координатно-расточные станки предназначены для обработки отверстий с точными координатами. Станки этого типа имеют два исполнения: одностоечное (рис.1, а) и двухстоечное (рис.1, б). Основными частями одностоечного координатно-расточного станка являются станина 1, стойка 2, расточная головка 3, стол с салазками 4. Двухстоечный координатно-расточный станок 2Е470А имеет следующие основные части: станину 1, стойки 2, расточные головки 3, траверсу 4, рабочий стол 5.
Обрабатываемую деталь закрепляют на плоскости стола, режущий инструмент – в шпинделе расточных головок. В зависимости от высоты обрабатываемой детали траверсу и расточную головку устанавливают на определённую высоту и закрепляют. Установка шпинделя на заданные координаты осуществляется перемещением стола в двух взаимно перпендикулярных направлениях (при работе на одностоечном станке) или перемещением стола в продольном направлении по направляющим станины и расточной головки в поперечном направлении по траверсе (в случае работы на двухстоечном станке портального типа). Особенностями конструкции, монтажа и обслуживания координатно-расточных станков являются:
наличие корригирующих устройств, компенсирующих погрешность шага ходового винта (на станках старых моделей);
применение оптических устройств для отсчёта координат; использование роликовых направляющих, воспринимающих массу салазок, стола, изделия и силу резания;
высокая точность обработки деталей и сборки узлов и высокое качество обрабатываемой поверхности; хорошая виброустойчивость и массивный фундамент; постоянная температура в помещении в пределах (20![]() 1,5)
1,5) ![]() С;
С;
высокая квалификация рабочих, обслуживающих станки; минимальные и регламентированные припуски на обработку отверстий.
а) б)
Рис.1. Координатно-расточные станки:
а – одностоечный: 1 – станина, 2 – стойка, 3 – расточная головка, 4 – стол с салазками;
б – двухстоечный: 1 – станина, 2 – стойки, 3 – расточные головки, 4 – траверса, 5 – рабочий стол
Одностоечные вертикальные координатно-расточные станки предназначены для обработки отверстий с точным расположением осей, размеры между которыми заданы в прямоугольной системе координат.
Кроме того, на станке также возможно:
· нарезание резьбы;
· чистовое фрезерование поверхностей торцевыми или концевыми фрезами;
· подрезка торцов;
· разметка и контроль линейных размеров на деталях.
Поворотные столы, поставляемые со станками, позволяют производить обработку отверстий, заданных в полярной системе координат, а также взаимно перпендикулярных и наклонных отверстий и плоскостей.
В условиях нормальной эксплуатации станки обеспечивают точность межцентровых расстояний при обработке в прямоугольной системе координат до 0,06 мм.
Станки комплектуются разнообразным инструментом и принадлежностями для сверления и растачивания отверстий, резьбонарезания, фрезирования и разметки:
· патроны:
- цанговый с комплектом цанг,
- сверлильный,
- резьбонарезной,
- расточный.
· втулки переходные для инструмента с конусом Морзе
· оправки для фрез
· набор борштанг
· универсальный резцедержатель и резцедержатель с точной подачей
· микроскоп-центроискатель, оправка-центроискатель
· керн пружинный
· центр установочный
· широкий набор резцов расточных, сверл, развёрток, фрез, метчиков.
Рекомендуемая область применения - инструментальные и производственные цехи машиностроительных предприятий при индивидуальном и серийном производстве точных деталей без специальной оснастки.
Координатно-расточный станок мод.2Е450
Станок мод. 2Е450А – одностоечный с размерами стола 630х1120 мм, оснащённый оптической измерительной системой с экранным отсчётом, устройством для предварительного набора координат, автоматическим остановом стола и салазок в заданных положениях с помощью фотоэлектрического нуль-индикатора. Эталонами длины являются плоские стеклянные штриховые меры. Период вращения шпинделя осуществляется от регулируемого электродвигателя постоянного тока через трёхступенчатую коробку скоростей. В пределах каждой ступени частота вращения шпинделя регулируется бесступенчато в пределах 50-2500 об/мин. Подача шпинделя также регулируется бесступенчато с помощью фрикционного вариатора. Имеется механизм автоматического отключения подачи шпинделя на заданной глубине. Предусмотрены механические зажимы стола и ручной зажим шпиндельной бабки. Точность установки координат 0,004 мм, точность диаметра расточенного отверстия допускается не более 0,005 мм.
Координатно-расточный станок мод.2Д450
Одностоечный координатно-расточный станок мод. 2Д450 с рабочей поверхностью стола 630х1120 мм. оборудован оптическими устройствами, позволяющими отсчитывать целую и дробную части координатного размера. Станок может использоваться как в инструментальных, так и в производственных цехах для точной обработки деталей без специальной оснастки. В условиях нормальной эксплуатации станок обеспечивает точность установки межцентровых расстояний в прямоугольной системе координат 0,004 мм. и в полярной системе – 5 угловых секунд. Точность расстояний между осями отверстий, обработанных в нормальных для координатного растачивания условиях, 0,006 мм.
Установка оси отверстия на изделии относительно оси шпинделя на требуемую координату осуществляется движением стола или салазок , перемещение которых контролируется специальным оптическим устройством. Последнее базируется на точных линейках, закрепляемых в одном случае на столе (подвижная линейка), в другом – на станине (неподвижная линейка). Линейка стола имеет 1000 высокоточных делений через 1мм., линейка станины – 630 делений. Штрихи проектируются на матовый экран с 75-кратным увеличением. Для оценки сотых долей одного интервала линейки в плоскости экрана имеется шкала со 100 делениями. Для получения отсчёта большой точности на экране имеется дополнительная шкала, позволяющая производить отсчёт до 0,001 мм.
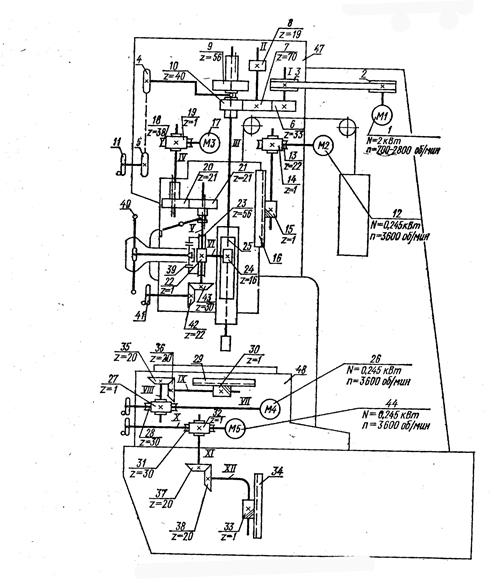
Рис. 2. Кинематическая схема станка мод. 2Д450
На рис.2 показана кинематическая схема станка мод. 2Д450. Цепь главного движения определяет вращение шпинделя с режущим инструментом, которое осуществляется от регулируемого электродвигателя постоянного тока 1 через ременную передачу 2-3, вал I, зубчатые колёса 6-7, вал II, колёса или 7-10 на шпиндель III. Частота вращения шпинделя изменяется бесступенчато путём регулирования электродвигателя 1 в пределах 700-2800 об/мин. Переключение ступеней частоты вращения двухступенчатой коробкой скоростей производится маховичком 11 через цепную передачу 4-5. Частота вращения контролируется тахогенератором, установленным на валу I.
Вертикальная подача гильзы, шпинделя осуществляется от отдельного электродвигателя 17 постоянного тока с широким диапазоном регулирования. Вращение через червячную передачу 18-19, шлицевый вал IV, зубчатые колёса 20-21, вал V и червячную пару 22-23, фрикционную муфту с рейкой 25 гильзы шпинделя. Рукоятками 40 при выключенной муфте можно вручную производить подъём или опускание гильзы шпинделя. Для более точных перемещений гильзы имеется маховичок 41, связанный с валом V коническими колёсами 42-43. Автоматическое выключение подачи гильзы шпинделя при достижении заданной глубины сверления осуществляется отключением 17 микропереключателем.
Установочное перемещение шпиндельной головки производится от асинхронного электродвигателя 12 через червячную передачу 13-14 и реечную 15-16. Перемещение заготовки в прямоугольной системе координат производится за счёт перемещения стола в продольном направлении и салазок – в поперечном от двух независимых электродвигателей постоянного тока 44 и 26 через аналогичные червячные передачи 27-28 и 31-32, конические передачи 35-36 и 37-38, реечные передачи 29-30 и 33-34.
Для закрепления стола, салазок и шпиндельной головки в нужных положениях применены унифицированные зажимы.
Таблица 1.
Модельный ряд координатно-расточных станков
| Модель | Характеристики |
| 2А450 | Станок с оптической системой отсчёта координат по осям X и Y |
| 2А450АФ10, 2Д450АФ10 | Станки с электронной отсчётно-измерительной системой, включающей устройство цифровой индикации, по осям X и Y. Режим электронного маховика. |
| 2Л450АФ11-01 | Станок с устройством цифровой индикации по осям X, Y и Z и предварительным набором координат по осям X и Y. Предусмотрен следящий режим позиционирования и режим электронного маховика с дискретностью перемещения стола 0,001 и 0,01 мм |
| 2Е450АФЗ0 | Станок с устройством ЧПУ, с возможностью задания программы обработки в диалоговом режиме по осям X и Y и цифровой индикацией координат по оси Z. |
| 2Л450АФ4 | Станок с устройством ЧПУ, с контурной обработкой по осям X , Y и Z. Графический монитор позволяет производить отладку программ без движения по осям. Программы обработки деталей могут быть подготовлены в диалоговом режиме стандартными текстовыми файлами или автоматизированными системами. |
2. Расчет критериев
2.1 Критерии развития технических объектов
Среди параметров и показателей, характеризующих любой технический объект, всегда имеются такие, которые на протяжении длительного времени имеют тенденцию монотонного изменения или тенденцию поддержания на определенном уровне при достижении своего предела. Эти показатели всеми осознаются как мера совершенства и прогрессивности, и они оказывают сильное влияние на развитие отдельных классов технических объектов и техники в целом.
Такие параметры и показатели называют критериями развития технических объектов. Об их важности можно судить по тому факту, что технический прогресс в области любых технических объектов обычно заключается в улучшении одних критериев без ухудшения (во всяком случае без значительного ухудшения) других. При формировании системы критериев развития должен удовлетворяться ряд условий:
- измеримости: за критерий развития может быть принят только такой параметр технического объекта, который допускает возможность количественной оценки по одной из шкал измерений;
- сопоставимости: критерий развития должен иметь такую размерность, которая позволяет сопоставлять технические объекты разных времен и стран;
- исключения: за критерии развития могут быть приняты только такие параметры технического объекта, которые в первую очередь характеризуют его эффективность и оказывают определяющее влияние;
- минимальности и независимости: вся совокупность критериев развития должна содержать только такие критерии, которые не могут быть логически выведены из других критериев и не могут быть их прямым следствием.
Оценка технического уровня и качества изделия осуществляется путем сопоставительного (сравнительного) анализа в следующем порядке:
- выбирается базовое изделие (идеальный вариант, аналог или прототип);
- выявляются численные значения основных технико-экономических показателей оцениваемого и базового изделий:
- рассчитываются уровни относительных показателей технического уровня и качества;
- рассчитывается величина обобщенных показателей технического уровня и качества изделий.
Следует отметить, что главное условие сравнения оцениваемого и базового изделия - сопоставимость элементов изделий, идентичность функционального назначения.
В качестве базового изделия для сопоставления выбирают наилучший, реальный образец данного вида и типоразмера изделий, имеющийся в мировой практике. Он может быть как отечественным, так и зарубежным и именуется аналогом. Иногда при решении задач по модернизации изделий данного вида в качестве базового изделия принимают изделия-прототип, которое совершенствуется путем устранения имеющихся недостатков.
В отдельных случаях в качестве базового изделия может быть принято оборудование будущего - идеальный вариант. Показатели, характеризующие идеальный вариант по техническому уровню и качеству, рассчитываются, исходя из законов развития техники данного вида по критериям развития.
При оценке технического уровня и качества изделий значения основного размерного параметра (производительность, рабочая поверхность, полезный объем и т.д.) не должны отличаться от такового для базового изделия более чем на 20 %.
2.2 Расчет
Таблица 2.
Технические данные координатно-расточных станков с рабочей поверхностью стола 630х1120 мм
| Год выпуска | Модель станка | Наибольший диаметр сверления/растачивания, мм | Вылет шпинделя, мм | Наибольшее расстояние от торца до рабочей поверхности стола, мм | Пределы частот вращения шпинделя, об/мин | Мощность, кВт | Масса, кг | Габариты | ||
| Длина, мм | Ширина, мм | Высота, мм | ||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 10 | 11 | 12 |
| 1968 | 2А450 | 30/250 | 710 | 750 | 50-2000 | 2,0 | 7800 | 2670 | 3305 | 2660 |
| 1973 | 2Д450 | 30/250 | 710 | 800 | 50-2000 | 2,2 | 7800 | 3305 | 2705 | 2800 |
| 1978 | 2450А | 40/250 | 715 | 750 | 32-2000 | 6,3 | 7920 | 2430 | 2750 | 3400 |
| 1983 | 2Е450АФ1-1 | 30/250 | 710 | 770 | 10-2000 | 7,2 | 8500 | 2760 | 2765 | 3000 |
| 1990 | 2Е450А | 30/250 | 710 | 770 | 10-2500 | 7,2 | 8050 | 3350 | 2500 | 2885 |
| 1992 | 2Е450АФ30 | 30/250 | 710 | 770 | 10-2500 | 7,2 | 8000 | 2760 | 2980 | 2980 |
Анализируя представленные данные, можно составить номенклатуру критериев развития координатно-расточных станков. Произведем расчет исследуемых критериев, результаты вычислений которых представлены в таблице 2.
1.Удельная материалоёмкость.
Км = М / N
где: Км - удельная материалоёмкость. (кг / мм.)
М – масса (кг)
N – величина главного параметра (мм).
2.Удельная энергоемкость.
Еу = P / N
где: Еу - удельная энергоемкость (кВт/м);
P – мощность (кВт);
N – величина главного параметра (м).
3.Удельная площадь, занимаемая станком.
Sy
= S / N![]()
где : Sy – удельная площадь занимаемая т.о. (м2 / м)
S – площадь занимаемая станком (м2 )
N- единица главного параметра ( м )
4. Единица мощности электродвигателя, приходящейся на единицу массы станка.
Таблица 3. Критерии развития.
| Год | Удельная материалоемкость, кг/мм | Удельная энергоемкость, кВт/м | Единица мощности на единицу массы, Вт/кг | Удельная занимаемая площадь, м2 /м |
| 1968 | 31,2 | 8 | 0,25 | 35,29 |
| 1973 | 31,2 | 8,8 | 0,28 | 35,76 |
| 1978 | 31,68 | 25,2 | 0,79 | 26,73 |
| 1983 | 34 | 28,8 | 0,84 | 30,52 |
| 1990 | 32,2 | 28,8 | 0,89 | 33,5 |
| 1992 | 32 | 28,8 | 0,9 | 32,8 |
По полученным данным критериев развития построим графики, благодаря которым можно проследить тенденцию изменения критериев и сделать прогноз на 2007 год.
2.3 Определение изменения критериев
Удельная энергоёмкость
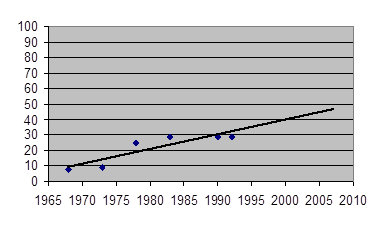
Учитывая изменение значений удельной энергоемкости станка, можно проследить тенденцию увеличения данного параметра. С помощью метода аппроксимации можно сделать прогноз на 2007 год, значение параметра составит 45 кВт/м.
Удельная материалоёмкость
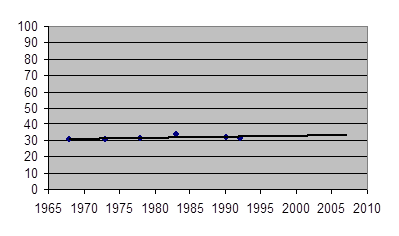
С помощью метода аппроксимации тенденций находим уровень критерия в 2007 году. С определенной долей вероятности мы можем утверждать, что значение критерия составит 32 кг/мм.
Единица мощности на единицу массы
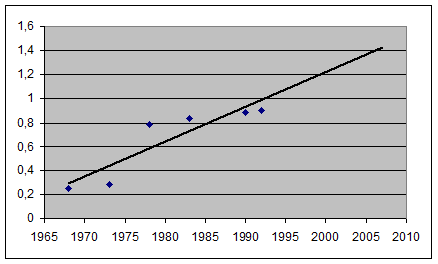
Полученная кривая свидетельствует об очевидном росте единицы мощности, приходящейся на единицу массы координатно-расточного станка. Прибегая к помощи метода аппроксимации, можно предположить возможное значение данного параметра в 2007 году, которое составит 1,42 Вт/кг.
Удельная занимаемая площадь

С помощью метода аппроксимации тенденций находим уровень критерия в 2007 году. С определенной долей вероятности мы можем утверждать, что значение критерия снизится и составит 30 м2 /м.
3. Перспективы дальнейшего развития координатно-расточных
станков
Модернизация КРС
В настоящее время в российской промышленности имеется большой парк морально и физически устаревших координатно-расточных станков моделей 2А450, 2Д450, 2Е450 и их модификаций. Возраст этих станков достигает 30-40 лет, поэтому их конструкционные решения не отвечают современным требованиям, предъявляемым к станкам. Кроме того, высокий износ узлов и потеря точностных параметров вызывают проблемы с их эксплуатацией. Всё это требует обновления станочного оборудования, но большинство предприятий в современной экономической обстановке не имеют для этого достаточных средств. Поэтому в данных условиях экономически целесообразно производить модернизацию имеющегося оборудования, в результате чего потребитель получал бы современный станок, в конструкции которого был бы воплощён многолетний опыт производства станков, соответствующий всем требованиям к точечности (для данного станка), оснащённый современными комплектующими и системами управления. При этом заказчик, сдав станок на модернизацию, может не ждать когда пройдёт весь производственный цикл модернизации станка, а получить модернизированный станок данной модели (или станок другой модели) из имеющегося на заводе задела по станкам. При этом из цены приобретенного станка будет вычитаться оценочная стоимость сданного станка.
Основными составляющими модернизации координатно-расточных станков c ручным управлением в общем случае являются:
· установка электронной отсчётно-измерительной системы, включающей в себя фотоэлектрические преобразователи линейных перемещений типа ЛИР и устройство цифровой индикации взамен оптических отсчётных устройств;
· использование программируемого контроллера для построения схемы электроавтоматики станка взамен релейной схемы управления;
· шариковые винтовые пары и регулируемые высокомоментные электродвигатели постоянного тока в приводах перемещений стола и салазок взамен зубчато-реечных передач, простых регулируемых электродвигателей постоянного тока и червячных редукторов;
· установка пневмозажимов стола и салазок вместо электромеханических зажимов;
· механизация перемещения шпиндельной коробки;
· применение конструкции привода перемещения гильзы с регулируемым двигателем постоянного тока.
Заключение
В своей курсовой работе я разработал номенклатуру критериев развития для координатно-расточных станков с поверхностью стола 630х1120мм, взяв за главный параметр наибольший диаметр растачивания. Проанализировал динамику этих критериев по годам выпуска станков. Выяснил, за счёт каких факторов произошло изменение значений критериев. Дал схему станка, описал его устройство, принцип работы. Проанализировал зависимость удельных показателей (удельной энергоемкости, материалоемкости) от размеров станка.
Дал прогноз значений критериев на 2007 год. Числовые значения показателей привёл в табличной и графической форме. Работу я закончил описанием перспективы развития координатно-расточных станков.
Список литературы:
1. Половинкин А.И. Основы инженерного творчества. - М: Машиностроение, 1988, -368с.
2. Белик В.Г. Технический уровень машин и аппаратов: пути его повышения. - Киев, Техника, 1991.-200с.
3. Могунов В.И. Металлорежущие станки. Краткий справочник. - М.: Госинти, 1964. -505с.
4. Номенклатурный справочник. Универсальные металлорежущие станки, выпускаемые предприятиями Минстанкопрома в 1978-1979 г. - М.: НИИМАШ, 1968. - 219с.
5. Металлорежущие станки. Каталог-справочник. Ч.3 - Станки сверлильно-расточной группы - М.: НИИМАШ, 1973.
6. Металлорежущие станки. Каталог-справочник. Ч.2 - Станки сверлильно-расточной группы. - М.: НИИМАШ, 1965.
7. Металлорежущие станки. Под ред. В.Э. Пуша.-М.: Машиностроение, 1986. -571с.
8. СССР Минстанкопром. Универсальные металлообрабатывающие станки, выпускаемые предприятиями Минстанкопрома в 1973-1974 г. Номенклатурный справочник. - М.: НИИМАШ, 1973. -173с.
9. СССР Минстанкопром. Универсальные металлообрабатывающие станки, выпускаемые предприятиями Минстанкопрома в 1970 г. Номенклатурный справочник. - М.: НИИМАШ, 1970.- 123с.
10. Металлорежущие станки. Номенклатурный каталог. Ч. 1. 1992-1993 г. - М.: ЭНИМС, ВНИИТЭМР, 1992.
11.Металлорежущие станки. Номенклатурный каталог. Ч. 1. 1990-1991 г. - М.: ВНИИТЭМР, 1990.
12.Металлорежущие станки. Под ред. Н.С.Колева.-М.:Машиностроение,1980.-500с.
13. Смирнов А.И. Перспективы технологии машиностроения. -М.: 1992 г.
14. Смирнов В.К. Токарь-расточник: Учеб. Для CПТУ. – 5-е изд., перераб. и доп. – М.: Высш. шк., 1987. – 255 с.