| Похожие рефераты | Скачать .docx |
Дипломная работа: Анализ гидроакустических сетей
Исходные данные к проекту:
Тип сети – гидроакустическая широкополосная цифровая сеть интегрального обслуживания.
Количество узлов коммутации – несколько десятков.
Скорость передачи информации в гидроакустической сети - ?
Структура сети – не иерархическа.
Метод формирования таблиц маршрутизации – вероятностный, диффузный.
Метод формирования плана распределения информации – логически-игровой.
Виды служб – интерактивные.
Соединение – точка-точка.
Перечень графического материала:
Классификация методов маршрутизации.
Описание логически-игрового метода
Структураня схема маршрутизатора с использованием логически-игрового метода формирования плана распределения информации.
Данный дипломный проект посвящен разработке структурной схемы маршрутизатора, использующего логически-игровой метод фоормирования плана расрпеделения информации на гидроакустической широкополосной цифровой сети интегрального обслуживания.
В разработке представлены общие сведения о гидроакустических сетях: топология сети, методы множественного доступа, маршрутизация в гидроакустических сетях и так далее.
Представлены общие принципы технологии АТМ. Описана общая структура маршрутизации и общая классификация методов маршрутизации, где описываются методы формирования плана распределения информации и выбор исходящей линии связи.
Предлагается алгоритм работы маршрутизатора и его структурная схема.
Представлено технико-экономическое обоснование проекта, и рассмотрены вопросы охраны труда и безопасности жизнедеятельности.
Введение. 5
1 Определения. 7
1.1 Классификация существующих гидролокационных устройств. 7
1.2 Шумы в гидроакустике. 10
1.3 Воздействие природных явлений в гидроакустике. 12
2 Подводные акустические сети. 15
2.1 Гидроакустическая связь. 17
2.3 Сетевая топология. 18
2.4 Методы множественного доступа. 19
2.5 Алгоритмы маршрутизации. 20
2.6 Протоколы управления доступом. 21
2.7 Методы запроса авто-повторений. 23
2.8 Пример разработки: сеть SeaWeb. 24
2.9 Цели эксперимента и подход. 24
2.10 Инициализация и маршрутизация. 26
2.11 Протокол доступа. 27
3 Принципы технологии АТМ.. 28
4 Быстрая коммутация пакетов. 35
5 Маршрутизация. Основные определения. 39
5.1 Общая классификация методов маршрутизации. 39
5.2 Формирование плана распределения информации. 43
5.3 Выбор исходящей линии связи. 52
6 Структурная схема маршрутизатора с использованием логически-игрового метода формирования плана распределения информации. 54
6.1 Алгоритм работы маршрутизатора. 54
7 Безопасность жизнедеятельности. 59
7.1 Общий обзор вредных факторов. 59
7.2 Требования к монитору. 61
7.3 Правильная организация рабочего места. 62
7.4 Рабочая среда. 64
8 Расчет экономических показателей схемы маршрутизатора. 71
8.1 Расчет себестоимости и цены схемы маршрутизатора. 71
8.2 Оценка эффекта использования схемы маршрутизатора в ГА сетях связи 75
Приложение А.. 78
Приложение Б. 79
Список используемой литературы.. 81
Явление гидроакустики (ГА) уже достаточно давно широко используется в различных областях жизнедеятельности человека. С помощью гидроакустики производится поиск движущихся подводных объектов, осуществляется управление движением судов, прогнозирование стихийных бедствий, извержений вулкана, цунами и многое другое.
Но, несмотря на востребованность данного явления, использовать его в большем масштабе было невозможно по многим причинам. Скорость распространения звуковой волны очень низка: например, скорость распространения звуковой волны в породах земной мантии 8 километров в секунду, в коре Земли – 3-4 километра в секунду, а в слоях осадочных пород, выстилающих дно океана всего 2 километра в секунду, то есть гораздо ниже скорости распространения звука в радиоканале [3]. Ранее использовался некогерентный прием ДЧМ, так как эти системы более эффективны для гидроакустики, но они делали невозможным достижение более высокой скорости передачи данных.
Развитие техники и технологии привело к появлению систем передачи данных узконаправленного действия с высокой скоростью передачи на дальние расстояния.
Стало возможным не только передавать информацию на дальние расстояния, но и разворачивать целые сети для передачи информации под водой с обеспечением связи с внешними сетями.
При использовании данных сетей связи, как и любых других, необходимо cоблюдение нескольких условий:
передача информации между узлами должна осуществляться без потерь;
необходимо обеспечить минимальную задержку при передаче данных;
оптимальное использование ресурсов сети.
Для гидроакустической сети связи очень важным параметром является также потребление энергии, так как иногда уменьшение энергетических затрат достигается путем более длительной передачи информации.
Одной из проблем, возникающих при передаче информации в гидроакустических сетях, является проблема маршрутизации.
Маршрутизация позволяет определить оптимальный по заданным параметрам маршрут (например, количество транзитных узлов коммутации (УК), время задержки в элементах сети связи при передаче информации между пользователями, надежность элементов сети и так далее) на сети связи между абонентскими пунктами (АП) пользователей либо узлами коммутации.[9].
Целью данного дипломного проектирования является разработка структурной схемы для гидроакустической сети связи с использованием наиболее подходящего из нижеописанных метода формирования плана распределения информации (ПРИ) и исходящей линии связи (ЛС).
1.1 Классификация существующих гидролокационных устройств
Гидролокация – это обнаружение, определение местоположения и установление физической природы объектов в море с использованием отражения, переизлучения или собственного отражения акустических волн, распространяющихся в водной среде [7]. Акустическая волна в данном случае – это полезный сигнал, с помощью которого передаются данные в гидроакустическом канале. Скорость передачи акустической волны на пять порядков ниже, чем скорость распространения радиоволн. При условии хорошего распространения звуковой волны дальность связи обеспечивается до 10 километров и более. Существуют приборы – лучеграфы, которые по значениям скорости звука на нескольких глубинах автоматически вычерчивают траекторию звуковых лучей, направленных под различными углами к горизонту.
Важным фактором распространения звуковой волны является гидростатическое давление – глубина, на которой распространяется звук. Звуковой канал залегает в океане на глубине нескольких сотен метров. Возможны приповерхностные и поверхностные каналы, а также каналы в осадочных породах, застилающих дно [3]. Существуют пассивные слои-фантомы морского дна – скопление морских организмов, обуславливающих появление звукорассеивающих полей.
Гидролокационным наблюдением называется обнаружение объектов, определение их местоположения и измерение параметров движения гидроакустическими методами. Устройства, выполняющие эти функции – гидролокационные системы (ГЛС).
В зависимости от того, как отражается гидроакустический полезный сигнал, различают следующие виды гидролокационного наблюдения.
Гидролокационные системы наблюдения, основанные на отражении от объектов звуковых сигналов, излучаемых генератором гидролокационной системы. Отраженный гидроакустический сигнал несет информацию о координатах, параметрах движения объекта и о его физических особенностях. Такие гидролокационные системы называются активными. Они позволяют обнаруживать объекты, не являющиеся источниками активных излучений.
Гидролокационные системы наблюдения, основанные на приеме сигналов собственного акустического излучения объектов. Это пассивные гидролокационные системы. К полезным сигналам пассивных систем можно отнести шумы механизмов и машин, гидродинамические шумы, излучения генераторов гидролокационных систем.
Гидролокационные системы наблюдения, основанные на ретрансляции – переизлучении сигналов генераторов активных гидролокационных систем специальными ретрансляторами, что широко используется в навигации [7].
Схема гидролокатора такова: мощный электрический генератор создает звуковые или ультразвуковые импульсы-посылки. После излучения импульса излучатель переключается на режим приема колебаний и с этого момента начинает принимать эхо, отраженное любыми подводными препятствиями. Звуковая мощность гидролокатора очень велика.
Шумопеленгатор (пассивный гидролокатор) для надводного корабля – это подводные “уши”, а для подводной лодки и “глаза”, так как на больших глубинах гидроакустическое ухо слышит дальше, чем видит телевизионный подводный глаз.
В качестве приемников шумопеленгаторов применяют пъезоэлектрические или магнитострикционные преобразователи. В первом случае под воздействием звукового давления получаются электрические заряды, которые подаются на вход усилителя, а он в свою очередь увеличивает электрическое напряжение до необходимого значения. А в магнитострикционном приемнике происходит преобразование звуковой энергии в энергию электро-магнитного поля.
Эхолот от гидролокатора отличается направлением звукового луча, отсутствием устройств, указывающих пеленг на отражающий объект. Для больших глубин рабочая частота уменьшается, чтобы затухание звука не ослабилось до уровня помех. Эхолот используется в качестве поводыря на судне указывающего когда можно двигаться полным ходом, когда следует замедлить ход или остановиться.
С помощью ГЛС производится обнаружение рыбных косяков, ведется картографирование морского дна и поиск полезных ископаемых в прибрежных районах морей, решаются задачи навигации и гидроакустической океанографии, проводится сейсмографическое прогнозирование, подводное управление транспортными средствами. Например, управление движением судов производится при помощи цепочки звукопроводящих маяков, располагающихся на якорях на дне моря по средней линии обслуживаемой трассы движения судов.
В рыболовном промысле рыболокаторы могут определить местонахождение рыбных скоплений в горизонтальном, вертикальном или обоих направлениях.
В основу ГЛС положено постоянство скоростей распространения звуковых волн в воде и прямолинейность их распространения в однородной среде, что позволяет определять расстояние до объекта прямым или косвенным измерением времени прохождения волн от ГЛС до объекта и обратно.
Существует множество типов подводных звукоприемников – волоконно-оптические, конденсаторные (с применением некоторых диэлектриков – меняющих свои свойства под воздействием колебаний) и другие.
Чтобы получить более сильные сигналы используют не один приемник, а группы подводных приемников.
Данные от гидролокационного устройства поступают на донные станции, датчики гидроакустической сети связи. Сеть состоит из большого числа датчиков, которые могут быть неподвижными, или медленно передвигающихся. Суммарная информация гидроакустической сети состоит из океанических параметров: например солености воды, температуры, подводных потоков. На поверхности располагаются станции, которые служат как шлюзы, обеспечивающие радиосвязь с береговыми станциями. Пользователями таких сетей могут быть метеорологические станции, военные центры, добывающая и промысловая промышленность и другие. Осуществляется и обратная задача, например субмарина может обратиться к внешним системам и осуществить передачу сигнала подводной сети.
Подводные лодки получают современное гидроакустическое оборудование обнаружения и связи, приборы для обнаружения работы гидролокационных станций противника, приборы для прогнозирования погоды.
Также для военной и добывающей промышленности используется гидроакустический канал для приведения в действие различных подрывных устройств.
Особенностью таких сетей является низкая пропускная способность и высокое время ожидания из-за медленного распространения звука и высокого уровня шумов [12].
1.2 Шумы в гидроакустике
В качестве обязательного параметра любой гидролокационной системы вводится минимальное (пороговое) отношение сигнал/помеха, при котором обеспечиваются заданные количественные характеристики эффективности этой системы. Мешающие гидролокационному наблюдению сигналы обусловлены тепловыми шумами, кавитационными шумами, шумами моря, шумами судоходства, реверберационными шумами [3].
Тепловые шумы вызываются движением молекул воды. Получить информацию о начальном положении и скорости каждой молекулы невозможно, к тому же очень сложная система уравнений, описывающих движение молекул. Поэтому законы по описанию тепловых шумов рассматриваются как случайные пространственные процессы. Уровень тепловых шумов мал по сравнению с шумами другого происхождения и определяют минимальный уровень шумов моря.
Кавитационные шумы появляются при возникновении в воде областей пространства, в котором давление отлично от статического. Внутри крошечных полостей, возникающих в воде при кавитации, образуется разрежение. Внезапное уменьшение давления в этих полостях настолько велико, что в них немедленно проникает воздух, растворенный в воде, и водяной пар. В результате образуется воздушный пузырек, который через некоторое время захлопывается, это сопровождается выделением акустической энергии. Кавитационные шумы описываются методами математической статистики. Возникающие при движении судов или гидрофонов в воде, они характеризуются очень большой интенсивностью.
Шумы моря возникают при движении масс воды вследствие деятельности человека и при движении морских организмов в воде. Источники шума моря не поддаются детерминированному описанию. Интенсивность шумов моря меняется в зависимости от места, времени и гидрологических условий. Она сильно возрастает в мелководных, прибрежных районах и при волнениях, сопровождается обрушением волн.
Шумы судоходства – это возмущения, создаваемые при движении судов вообще. Интенсивность этих шумов мало меняется при изменении точки наблюдения, а статические характеристики сходны с характеристиками шумов моря.
Реверберационные шумы возникают при отражении части энергии излучаемого (зондирующего) сигнала активной гидролокационной системы от поверхности моря, морского дна, биологических объектов в воде, от неоднородностей морской среды. Характеристики отражений взволнованной пространственно-временной границы раздела вода-воздух, шероховатой, в общем случае, пространственной границы вода-дно моря и биологических объектов в воде заранее неизвестны и меняются случайно. Поэтому реверберационные шумы описываются методами математической статистики.
1.3 Воздействие природных явлений в гидроакустике
Реверберация – это отражение звука от всех природных рассеивателей, создающих помеху гидролокации. Эхо от лоцируемого предмета может разбиваться на большое количество сигналов, а реверберация выделяется среди ложных эхо-сигналов. По теории В.В. Ольшевского реверберационная помеха маскирует полезный эхо-сигнал и затрудняет обнаружение подводных объектов. Для борьбы с ней концентрируют посылаемый и принимаемый сигналы в очень узком пучке, применяют фильтры, используют модуляцию сигнала.
Существует явление предреверберации, которая появляется перед сигналом на большом расстоянии от источника, когда основная реверберация уже затухла. Предреверберация обусловлена отражениями, приходящими раньше основного сигнала, путь которого может быть извилистым.
Но реверберацию можно использовать для определения направления и скорости движения лоцируемых подводных объектов, используя эффект Доплера, заключающегося в изменении частоты принимаемого сигнала в зависимости от скорости взаимного движения источника и приемника колебаний. При сближении приемника и источника колебания быстрее приходят к приемнику, это равноценно увеличению частоты колебаний источника, то есть высоты тона, соответственно, при удалении приемника от источника эффект тот же, что и при снижении частоты колебаний источника.
Эффект Доплера используется и в полезных целях. Например, действие гидроакустического лага основано на эффекте, который в данном случае проявляется в том, что при движении судна частота отраженного от дна звукового сигнала будет отличаться от частоты посылки (для луча, наклоненного вперед по ходу судна – в сторону увеличения, для луча, наклоненного в сторону кормы – в сторону уменьшения). Доплеровский сдвиг частоты может достигать достаточно больших значений: при частоте посылки 200 килогерц сдвиг частоты – 200 герц на каждый узел судна. Два наклоненных акустических луча позволяют определить и контролировать снос судна боковыми течениями.
Направление движения объекта определяют, сравнивая частоты посылаемых сигналов и принимаемого отраженного эха, для чего в тракт гидролокатора вводят доплеровские фильтры.
Если объект локации удаляется от лоцирующего корабля, тон эха понижается, тем сильнее, чем больше скорость объекта.
Неравномерный прогрев воды вызывает рефракцию звуковых лучей (искривление). Звуковые лучи стремятся в сторону холодных слоев, чаще находятся у поверхности моря ночью и в глубине днем. То же происходит и в зависимости от времени года – зимой лучи стремятся в приповерхностную зону, а летом в глубинные слои.
Рефракция значительно затрудняет обнаружение подводных объектов, навигацию и связь. Образуется “мертвые зоны” или “зоны тени”, в которые не попадают приемные звуковые сигналы [3].
Внутренние волны могут порождать весьма интересные гидроакустические явления, вариации и флуктуации сигналов во времени. Например при передаче акустических сигналов может возникать явление многолучевости распространения (реверберация), что может приводить к значительным искажениям исходного сообщения. С такими явлениями как многолучевость и Доплеровский эффект приходится бороться с помощью специальных методов обработки сигнала, например используется когерентный метод приема в подводной связи.
Подводные акустические сети состоят из автономных донных станций и поверхностных, которые служат как шлюзы и обеспечивают радиосвязь с береговыми станциями. Примечательной стороной таких сетей является низкая пропускная способность акустических каналов передачи, высокое время ожидания, следующее из медленного распространения звука, и высокие уровни шумов. Конечная цель при разработке подводных акустических сетей состоит в том, чтобы обеспечить самоконфигурирование узлов, которые автоматически адаптировались бы к среде.
В последние два десятилетия, акустическая технология связи под водой испытала существенный прогресс. Системы связи с повышенной скоростью передачи и надежностью теперь доступны для организации соединения в реальном масштабе времени между подводными узлами. Настоящие разработки направлены на объединение соединений точка-точка в единую сеть, чтобы удовлетворить запрос на системы, способные собирать и передавать данные с больших площадей: типа совокупности данных окружающей среды, контроля загрязнения и военного наблюдения.
Традиционный подход при исследовании океанского дна или толщи воды состоит в том, что необходимо развернуть океанографические датчики, произвести запись данных, и впоследствии поднять на поверхность оборудование с данными. Этот подход имеет несколько недостатков:
Записанные данные не могут быть переданы на поверхность, пока донная станция находится на дне.
Нет никакой связи между оборудованием, находящимся под водой и пользователем, поэтому невозможно переконфигурировать систему в случае необходимости.
Если отказ оборудования донной станции произойдет в подводном положении, то сбор данных может остановиться, или же все данные могут быть потеряны полностью. Идеальное решение при необходимости контроля областей океанской поверхности в реальном масштабе времени в течение длинных промежутков времени состоит в том, чтобы подключить донные станции с контролирующими центрами посредством беспроволочной связи. Основные подводные акустические сети формируются, путем установки двунаправленной акустической связи между узлами типа автономных подводных станций. Пользователи, расположенные на берегу могут получать данные в реальном масштабе времени от большого количества отдаленных донных станций. После оценки полученных данных они могут посылать сообщения управления любой из этих станций. Поскольку данные не хранятся более на донной станции, то их потеря, связанная с отказом оборудования последней, исключена.
Основная проблема любых донных станций на сегодняшний день – это обеспечение их необходимым питанием. Процесс замены батареи является процессом дорогостоящим, поскольку включает в себя поиск донной станции, ее подъем на поверхность и обратное погружение. Энергия является самым ценным ресурсом, когда речь идет о подводных аппаратах. Сетевые протоколы должны сохранить энергию, сокращая количество повторных посылок.
Некоторые подводные решения требуют, чтобы сеть была развернута настолько быстро, насколько это возможно, при том без существенного планирования. Поэтому, сеть должна обладать способностью самостоятельно определять расположение узлов и автоматически выбирать конфигурацию с целью обеспечения эффективности передачи данных. Также, в условиях изменения состояния канала или выхода из строя части узлов в ходе работы, сеть должна динамически изменить свою конфигурацию, чтобы сохранить работоспособность и продолжить функционирование.
2.1 Гидроакустическая связь
В отличие от цифровой связи через радио каналы, где данные передаются посредством электромагнитных волн, в подводных каналах прежде всего используются акустические волны. Скорость распространения акустических волн в ГА каналах на пять порядков меньше, чем скорость распространения радиоволн. Низкая скорость распространения соответственно увеличивает время ожидания пакета в сети. Если высоко время ожидания пакета, то при разработке сетевых протоколов для ГА следует учитывать, что скорость передачи в сети будет значительно меньше, нежели в радиоканале.
Возможная пропускная способность ГА канала зависит от частоты передачи. При этом для акустических сигналов наблюдается явление многолучевости распространения, что может приводить к значительным искажениям исходного сообщения. Для борьбы с многолучевостью и Доплеровским эффектом требуется значительное снижение скорости передачи данных и применение специальных методов обработки сигналов.
До начала прошлого десятилетия для достижения надежной связи в ГА каналах использовался некогерентный прием дискретной частотной модуляции. Хотя системы НКГ ДЧМ системы эффективны в ГА каналах, их низкая пропускная способность делает их непригодными для устройств с высокой скоростью передачи данных типа многопользовательских сетей. Потребность в системах дальнего действия с высокой скоростью передачи данных привела к появлению систем узконаправленного действия с когерентными методами приема. Сегодня, когда стали доступны компьютеры с высокой вычислительной мощностью, стало возможным применение когерентного приема в подводной связи.
2.2 Гидроакустические сети
Два типа задач приветствовали развитие подводных гидроакустических сетей. Первая задача сбора данных о состоянии окружающей среды, а другая – наблюдение за состоянием подводной обстановки. Как правило, сеть состоит из нескольких типов датчиков, некоторые из которых установлены стационарно, а другие на свободно перемещающихся транспортных средствах этот тип сети называется автономной Океанической Сетью, где суммарная информация состоит из набора океанографических параметров, например: температуры, солености, подводных потоков. Сеть состоит из большого числа датчиков, как правило, неподвижных или медленно передвигающихся. Такая сеть может быть быстро развернута. Задача такой сети охватить мелкую водную область. Пример такой сети, называемой SeaWeb, будет описан более подробно позже.
2.3 Сетевая топология
Есть три основных топологии, которые могут использоваться, чтобы связать сетевые узлы: централизованная, распределенная и многопролетная.
В централизованной сети связь между узлами организуется через центральную станцию, которая обычно называется сервером сети. Эта конфигурация подходит для глубоководных сетей, где поверхностный бакен может действовать в качестве центра и управлять связью с донными станциями. Главный недостаток этой конфигурации – присутствие единственного пункта, отказ которого приводит к отказу всей сети. Также, из-за ограниченности диапазона частот отдельного модема, сеть не может охватить большие области.
Следующие два типа топологии принадлежат одноранговым сетям. Полностью связанная одноранговая топология обеспечивает двухточечные соединения между каждым узлом сети. Такая топология устраняет потребность в маршрутизиции. Однако, мощность выходного сигнала, необходимая для передачи сообщения на отдельные узлы, чрезмерно высока. Также, возможно что узел, который пробует посылать сообщения далекому узлу, будет попросту заглушать связь между двумя узлами, находящимися сравнительно близко от него.
Одноранговая многопролетная топология подразумевает связь только между соседними узлами. Сообщения передаются от источника до адресата путем передачи пакетов от узла до узла. Для маршрутизации используются интеллектуальные алгоритмы, которые позволяют сети адаптироваться к изменяющимся условиям. Многопролетные сети способны охватывать относительно большие области, так как диапазон сети определен числом узлов.
Одна из целей при построении ГА сетей состоит в том, чтобы значительно уменьшить потребление энергии при условии обеспечения надежной связи между узлами в сети и выходом во внешнюю сеть. Сетевая топология является важным параметром, который определяет потребление энергии. Цена, которую приходиться платить за уменьшение в потреблении энергии – это потребность в сложном протоколе и увеличение длительности и времени распространения пакета. Поэтому, особое внимание нужно уделять задачам, которые являются чувствительными к временным задержкам.
2.4 Методы множественного доступа
В многих информационных сетях, включая ГА сети, связь – пульсирующая, и промежуток времени, в течении которого осуществляется передача по каналу, обычно меньше чем промежуток времени, в течении которого канал простаивает. Таким образом, сетевые пользователи должны совместно использовать ресурсы канала с максимальной эффективностью посредством метода множественного доступа. Множественный доступ с кодовым разделением каналов (FDMA), делит весь спектр частот на полосы и предоставляет пользователям отдельные частотные каналы. Из-за серьезных ограничений пропускной способности и уязвимости узкополосных систем к помехам, FDMA системы не являются эффективным решением в ГА каналах связи.
Вместо деления полосы частот применяется множественный доступ с временным разделением каналов (TDMA). Производится деление всего временного интервала на интервалы времени, называемые фреймами. Коллизии в результате пересечения пакетов от смежных слотов времени предотвращена включением времен защиты, которые пропорциональны задержкам распространения сигналов в канале. TDMA системы требуют очень точной синхронизации. Имеющиеся различия времени ожидания в ГА каналах требуют значительной длительности времени защиты, что значительно ограничивает эффективность TDMA. Также, реализация системы является трудной задачей.
Множественный доступ с кодовым разделением каналов (CDMA) Зпозволяет нескольким пользователям одновременно использовать одну и ту же полосу частот. Сигналы от различных пользователей различает посредством ПСП. CDMA каналы обеспечивают большую пропускную способность, они слабо восприимчивы к разнице времен задержки при распространении сигналов. Использование этого вида множественного доступа позволяет уменьшить потребление батареи и соответственно увеличить производительность сети. Следовательно, CDMA кажется наиболее подходящим методом для организации множественного доступа в небольших подводных гидроакустических сетях.
2.5 Алгоритмы маршрутизации
Существует два основных метода, используемые для маршрутизации пакетов внутри информационной сети: использование виртуальных каналов, где все пакеты одного потока следуют одним и тем же путем через сеть, и маршрутизация датаграмм, где пакеты следуют от отправителя до получателя различными путями. В первом случае виртуальные каналы определяются перед началом передачи информации. Во втором случае, каждый узел, на который приходит пакет, принимает решение, которое состоит в том, чтобы определить узел на который следует отправить пакет.
Многие из методов маршрутизации основаны на том, чтобы определить самый короткий путь для пакетов. В этом методе каждому соединению в сети назначается стоимость, которая является функцией физического расстояния и уровня перегрузок. Алгоритм пробует находить самый короткий путь (то есть, путь с самой низкой стоимостью) от узла до получателя.
В рассматриваемых сетях главная проблема состоит в том, чтобы получить текущее состояние каждого соединения в сети, чтобы остановиться на лучшем маршруте для пакета. Однако, состояние соединений является величиной постоянно меняющейся, в этом случае количество модификаций маршрутизации может быть очень высоко.
2.6 Протоколы управления доступом
Существуют различные протоколы управления доступом, которые могут использоваться, чтобы избежать информационной потери в ГА сетях, возникающей по причине коллизий. Рассмотрим MACA протокол и его разновидности.
MACA протокол заключается в использовании двух пакетов передачи сигналов имеющих названия: Request-to-Send (RTS) и Clear-to-Send (CTS). Когда абонент А хочет послать сообщение абоненту В, он сначала отправляет сигнал RTS. Если В получает RTS, то он посылает назад команду CTS. Как только А получает CTS, он начинает передачу пакета данных. Узлы могут исследовать канал на этапе обмена сигналами RTS-CTS. Информация о состоянии канала может использоваться, чтобы установить уровни мощности выводного сигнала и типа модуляции. Эти свойства MACA протокола необходимы для эффективной разработки подводных гидроакустических сетей.
Все это обеспечивает надежную связь с минимальным потреблением энергии и позволяет избежать коллизий. Обмен RTS-CTS увеличивает объем передаваемой информации, но сокращает количество повторных передач, что позволяет снизить объем передаваемой информации.
MACA протокол гарантирует надежность непрерывной связи на сетевом уровне. Если некоторые пакеты сообщения потеряны из-за ошибок, с узлов получателя будет подан запрос на повторную передачу пакетов. На высоко надежных линиях связи этот подход позволяет увеличить пропускную способность, так как это устраняет потребность посылать квитанции на каждый отправленный пакет. В случае, если передача идет через канал связи с низким качеством, сообщение будет содержать ошибочные пакеты. Восстановление ошибок в пакете данных на сетевом уровне будет требовать чрезмерной задержки.
Эффективность и надежность MACA протокола может быть значительно увеличена за счет создания надежных соединений между близко расположенными узлами. Для этой цели был предложен MACAW протокол, где квитанция передается после каждой успешной посылки. Включение дополнительного пакета в пересылке увеличивает потребление энергии, что в свою очередь уменьшает производительность системы. Однако для гидроакустических систем, при применении такого метода все равно наблюдается прирост производительности. Протокол MACAW не использует управление мощностью передачи и возникающие асимметрии в канале. Его эффективность при использовании управления мощностью передачи пока еще не исследована.
2.7 Методы запроса авто-повторений
Запрос авто-повторений (ARQ) используется, чтобы обнаружить ошибочных данных в процессе передачи по каналу связи и в случае их обнаружения осуществит повторную передачу пакетов, содержавших ошибки. Самая простая схема запроса авто-повторений, которая может быть использована в гидроакустическом канале это stop and wait RQ, где источник пакета ждет квитанции от узла адресата для подтверждения передачи пакета без ошибок. Так как канал не используется в течение времени между передачей пакета и приемом квитанции, эта ARQ схема имеет низкую производительность. В go back-N и селективном методах повторении ARQ , узлы передают пакеты и получают квитанции непосредственно в процессе передачи пакетов, поэтому требуют канал, поддерживающий полный дуплекс. Деление ограниченной пропускной способности ГА каналов на два канала реализации полного дуплекса может значительно уменьшать скорость передачи данных по физическому каналу. Однако, эффект от двух этих методов еще необходимо исследовать.
Схема селективного метода может быть модернизирована, чтобы работать в симплексных ГА каналах. Вместо подтверждения каждого пакета в процессе приема, получатель будет ждать пока не будут переданы N пакетов и после этого посылать квитанцию с номерами пакетов, полученных без ошибок. Соответственно, источник пакетов определит ошибочные пакеты по принятой квитанции и пошлет другую группу N пакетов, которая будет содержать повторно передающиеся и новые пакеты.
Подтверждения могут быть обработаны двумя возможными способами. В первом подходе, который называется “положительное подтверждение”, в случае приема пакета, не содержащего ошибок, узел адресата пошлет квитанцию исходному узлу. Если источник не получает квитанцию исходному узлу. Если источник не получает квитанцию за заданный промежуток времени, то он повторно передаст этот пакет данных. В случае отрицательного подтверждения, адресат посылает квитанцию, если получает поврежденный пакет или не получает его вообще. Отрицательное подтверждение может помогать сохранять энергию, устраняя потребность посылать квитанции каждый раз и повторно высылать пакеты данных в случае потери квитанции. Когда объединяют MACA протокол и отрицательную схему подтверждения, обеспечивается высокая надежность связи между узлами источника и получателя в процессе обмена RTS-CTS.
2.8 Пример разработки: сеть SeaWeb
Примером реализации подводной акустической сети служит Telesonar – программа американского флота и SeaWeb.
Telesonar соединяет распределенные подводные узлы, объединяет их в один ресурс, обрабатывает информацию и передает ее в подводное боевое пространство. SeaWeb обеспечивает передачу команд, управление, связь и навигационную инфраструктуру для координирования автономных узлов с целью выполнения поставленных задач в любой точке подводной среды. Организация сети SeaWeb подходит для океанографической телеметрии, подводного управления транспортными средствами и других целей.
Telesonar и SeaWeb экспериментально исследует многие аспекты проблем распространения, передачи сигналов, преобразования, организации сети и защиты передачи. Были проведены испытания SeaWeb 98, 99 и 2000.
2.9 Цели эксперимента и подход
Telesonar формирует цифровую сеть с использованием стационарных и подвижных узлов. Соединения telesonar-а должны быть ситуационно адаптивными в условиях двунаправленной асимметрии. SeaWeb опирается на сеть, состоящую из автономных стационарных узлов (например, датчиков, повторителей, управляющих узлов). Управляющие узлы собирают данные с узлов датчиков и отправляют на шлюзы и наоборот. Внешние устройства SeaWeb включают подвижные станции. Шлюзы SeaWeb соединяются с погруженными командными центрами и могут быть расположены на плаву, на берегу, на поверхности, организуя доступ к наземным, бортовым и другим внешним сетям. Точно так же субмарины могут обращаться к внешним системам и осуществлять передачу сигналов в систему telesonar. Сервер SeaWeb постоянно находится в командных центрах и обеспечивает интерфейс к подводной сети.
Развитие SeaWeb осуществляется за счет накопления опыта в длительных океанских экспериментах. Ежегодные эксперименты в системе SeaWeb необходимы, чтобы развивать критические области технологии, чтобы улучшить функциональные возможности и качество службы. Цель экспериментов SeaWeb состоит в том, чтобы проверять telesonar соединения, работу в сети, ее конфигурациях, использование различных видов и алгоритмов организации сети.
В долгосрочной перспективе, цель состоит в том, чтобы обеспечить сеть возможностью самостоятельно конфигурироваться с соединениями между узлами, адаптирующимися в изменяющейся среде посредством автоматического выбора оптимума параметров передачи.
Область развертывания сетей SeaWeb 98, 99 и 2000 –это воды залива Buzzards, штата Массачусетс.
Развитие системы SeaWeb требует обратить внимание на основные проблемы, возникающие в канале передачи, асинхронной организации сети, эффективности и стоимости. Знание фундаментальных ограничений технологии telesonar приводит к разработке все более и более сложных модемов. Система SeaWeb использует MACA протокол установления связи, замечательно подходящий для радио полудуплексной организации сети. Процесс процедуры установления связи позволяет осуществлять адресацию, определять расположение абонента, оценивать канал, управлять мощностью передачи.
2.10 Инициализация и маршрутизация
Алгоритм инициализации в рассматриваемой сети необходим, чтобы установить предварительные подключения. Этот алгоритм основан на опросе, он гарантирует обеспечение связи со всеми узлами, акустически достижимыми, по крайней мере, одним из близких к нему узлов. В течение инициализации узлы создают таблицы соседей. Эти таблицы содержат список соседей каждого узла и качественной меры их соединения, которая может быть получена путем передачи тестового пакета от соответствующего соседа. Эти таблицы собираются главным узлом, и в нем производится формирование дерева маршрутизации.
Оптимальные маршруты определяются с помощью протокола маршрутизации на основе алгоритма. Протокол маршрутизации пробует максимизировать срок службы питающейся от батареи сети, путем минимизации полного потребления энергии сетью. Минимальная энергия, требуемая чтобы установить надежную связь между двумя узлами, используемая как метрическое расстояние между узлом-отправителем и узлом-получателем. Главный узел собирает информацию от сетевых узлов, определяет оптимальные маршруты и посылает информацию маршрутизации узлам.
Эффективность акустических соединений между узлами может ухудшаться и даже пропадать, по причине отказа узла. В таких случаях, сеть должна самостоятельно адаптировать себя к изменяющимся условиям без прерывания передачи пакета. Эта ошибкоустойчивость может быть получена путем постоянного обновления маршрутов.
В текущей разработке, главный узел создает дерево маршрутизации в зависимости от таблиц соседей, полученных от узлов. Если узел сообщает, что эффективность связи ухудшилась, или связь в каком-то направлении больше недоступна, главный узел выбирает новые маршруты, которые заменяют собой вышедшие из строя. Изменения в дереве маршрутизации сообщаются всем узлам, с которыми есть соединения. Эта процедура гарантирует, что узлы не будут пытаться использовать нерабочие соединения. Таким образом, избегаются ненужные передачи, которые увеличивают потребление батареи.
2.11 Протокол доступа
Протокол доступа системы SeaWeb основан на MACA протоколе, который использует обмен RTS-CTS-DATA. Сеть использует схему авто-повторений stop-and-wait. Если источник не может получать CTS от адресата после определенного интервала времени, то он повторно высылает RTS. Если после К попыток передать RTS, источник не получает CTS, то он принимает решение, что связь больше не доступна и возвращается в спящее состояние (отсутствие излучения). Если источник получает CTS, то он немедленно передает пакет данных. Обмен RTS/CTS используется, чтобы определить состояние канала, и в дальнейшем эта информация используется, чтобы установить параметры системы передачи типа уровня выходной мощности. Квитанция, высылаемая адресатом после получения правильного пакета данных, обеспечивает подтверждение правильного приема данных. Протокол может также обрабатывать отрицательные подтверждения в зависимости от режима операции, выбранного пользователем.
Если два узла посылают RTS друг другу, могут происходить ненужные повторения, потому что оба узла игнорируют полученную команду RTS. Каждый узел будет ожидать CTS пакет в течение определенного промежутка времени, и повторно передавать RTS пакеты. Эта проблема решается путем назначения более высокого приоритета пакетом, которые направлены к главному узлу.
АТМ (Asynchronous Transfer Mode) – это асинхронный метод транспортирования информации.
Технология АТМ дает возможность:
транспортировать все виды информации в виде пакетов фиксированной длины – ячеек;
выделять пользователю в каждый момент времени только того ресурса пропускной способности сети, который ему необходим;
поддерживать интерактивные (диалоговые) службы и службы распределения информации, а также службы с установлением и без установления соединения;
передавать как непрерывный, так и пачечный трафик, что за счет мультиплексирования позволяет эффективно использовать сетевые ресурсы.
Особенность технологии АТМ состоит в приспособленности к транспортировке по сети информации любой службы, независимо от скорости передачи, требований к семантической и временной прозрачности и пачечности трафика ячеек.
При осуществлении АТМ осуществляется последовательность действий:
информация в цифровом виде разделяется на блоки фиксированной длины;
формируется ячейка АТМ, состоящая из информации пользователя и заголовка;
ячейка имеет фиксированную длину – 53 байта, причем 48 байт – это информация пользователя, а 5 байт отводится под заголовок.
При выборе длины ячейки АТМ международные организации стандартизации учитывали следующие факторы [8]:
задержка при заполнении пакета информацией пользователя (задержка при пакетизации), задержка в очереди, задержка на депакетизацию и колебания этих задержек (джиттер) должны быть невелики;
эффективность использования пропускной способности цифровых трактов;
сложность реализации выбранной технологии.
От каждого пользователя формируется последовательность ячеек АТМ, причем ячейки, принадлежащие различным пользователям, могут следовать в произвольном порядке, в отличие от синхронного метода, где каждый из временных каналов должен располагаться на оси времени на определенном расстоянии от начала цикла дискретизации [6]. Сущность технологии АТМ изображена на рисунке 3.1.
На рисунке 3.1 обозначено: Яnm – n-ая ячейка m-го пользователя
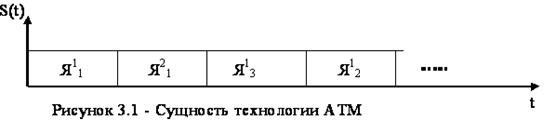
Последовательность ячеек одного пользователя образует виртуальный канал (ВК), а все множество виртуальных каналов формирует виртуальный тракт (ВТ).
В АТМ можно отметить следующие особенности [8]:
отсутствие защиты от ошибок и управления потоком данных на уровне звена;
ориентация на соединение;
ограничение количества функций, которые несет заголовок пакета АТМ;
относительно небольшая длина информационной части ячейки.
Высокое качество систем передачи цифровых трактов связи и очень малые значения вероятности ошибки на бит позволяют отказаться от обнаружения и исправления ошибок в пакете на звеньевом уровне. Отсутствие на уровне звена и управление потоком данных с целью исключения перегрузок.
Но в сетях АТМ не всегда удается установить соединение. Фазе передачи информации предшествует фаза установления виртуального соединения, во время которой осуществляется проверка достаточности объема сетевых ресурсов, как для качественного обслуживания уже установленных виртуальных соединений, так и для создаваемого. Отказ в установлении соединения оконечному устройству выдается в случае недостатка сетевых ресурсов.
После завершения фазы передачи информации виртуальное соединение разрушается, а сетевые ресурсы могут использоваться для обеспечения другого виртуального соединения. Таким образом, за счет использования режима переноса информации, ориентированного на соединение, и определения размеров очередей, осуществляется контроль за величиной потерь пакетов вследствие переполнения буферных устройств коммутаторов. Вероятность потери пакета в коммутационном устройстве в сетях АТМ не превышает значений 10^-8-10^-12 [8].
Для уменьшения временной задержки пакета в узлах коммутации сети АТМ функции заголовка пакета значительно ограничены. Основной функцией заголовка является идентификация виртуального соединения с помощью идентификатора и обеспечение гарантии правильной маршрутизации. При помощи заголовка возможно мультиплексирование различных виртуальных соединений в одном цифровом тракте.
Существует явление эффекта размножения ошибок, когда один искаженный бит в заголовке может привести к утрате пакета или к его доставке не по адресу, то есть к неправильной маршрутизации. С целью уменьшения эффекта размножения ошибок из-за неправильной маршрутизации необходимо в заголовке пакета АТМ обеспечить обнаружение и исправление ошибок.
Обработка заголовка пакета АТМ – процедура достаточно простая, так как количество функций, выполняемое им, ограниченно. Поэтому процедура осуществляется на высоких скоростях, а это обеспечивает малую задержку пакетов АТМ в буферных устройствах коммутаторов АТМ. Длина информационного поля ячейки выбирается относительно небольшой для уменьшения размеров внутренних буферов в узлах коммутации и ограничения времени задержек. Малые размеры информационного поля позволяют получить небольшие значения времени задержки на пакетизацию, что по совокупности с относительно небольшими размерами буферных устройств узлов коммутации, обеспечивающих незначительные задержки и колебания задержки, характеризуют временную прозрачность сетей АТМ для служб, функционирующих в реальном времени.
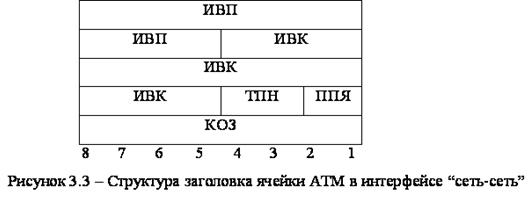
Форматы ячеек определены в Рекомендации МСЭ-Т I.361 [6]. При этом в отличие от У-ЦСИО в Ш-ЦСИО кроме интерфейса “пользователь-сеть” определен также интерфейс “сеть-сеть”, который используется и между узлами коммутации одной и той же Ш-ЦСИО. Соответственно имеются два вида ячеек для этих двух интерфейсов, которые отличаются друг от друга структурой заголовка. Структура заголовков в интерфейсах “пользователь-сеть” и “сеть-сеть” приведены на рисунках 3.2 и 3.3 соответсвенно.

Заголовок ячейки в интерфейсе “пользователь-сеть” имеет следующие поля:
общего управления потоком (GFC – Generic Flow Control) – ОУП длинною 4 бита;
идентификатора виртуального пути (VPI –Virtual Path Identifier) – ИВП длинною 8 бит;
идентификатора виртуального канала (VCI – Virtual Channel Identifier) – ИВК длинною 16 бит;
типа полезной нагрузки (PT – Payload Type) – ТПН длинною 4 бита;
приоритета потери ячейки (CLP – Cell Lass Priority) – ППЯ длинною 1 бит;
контроля ошибок в заголовке (HEC – Header Error Control) – КОЗ длинною 8 бит.
Структура заголовка ячейки в сетевом интерфейсе отличается тем, что ОУП не используется, а биты ОУП отданы полю идентификатора виртуального пути, длина которого увеличена до 12 бит.
Поле общего управления потоком (ОУП) предназначено для управления нагрузкой в соединениях “пользователь-сеть” с целью защиты от перегрузок, как в двухточечных, так и в многоточечных конфигурациях доступа. Поле ОУП используется для контроля нагрузки, создаваемой оконечными устройствами пользователя, но не используется для управления потоком, порождаемого сетью.
Маршрутное поле ячейки состоит из полей идентификатора виртуального пути (ИВП) и идентификатора виртуального канала.
Поле типа полезной нагшрузки (ТПН) используется для идентификации пользовательских ячеек, ячеек эксплуатации и технического обслуживания, и управления ресурсами.
Поле приоритета потери ячейки (ППЯ) используется для указания явного приоритета потери ячейки. Если в поле приоритета потери ячейки записана 1, то данная ячейка может быть отброшена в случае возникновения перегрузок. Если в поле ППЯ записан 0, то ячейка имеет высокий приоритет и должна быть сохранена. Поле потери ячейки устанавливается пользователем или поставщиком услуг.
Поле контроля ошибок в заголовке (КОЗ) используется для обнаружения и исправления ошибок в заголовке.
В протокольной модели Ш-ЦСИО имеются два уровня, относящихся к АТМ [6]:
уровень АТМ, который является общим для всех видов сервиса и обеспечивает возможность передачи отдельных ячеек;
адаптационный уровень (AAL), зависящий от вида сервиса.
Потоки данных (в том числе и речевая информация, представленная в цифровом виде) различных классов поступают на уровень адаптации АТМ, где подвергаются обработке в соответствии с двумя функциями:
совмещения потоков данных (Convergence Subfunction – CS);
сегментации или сборки сегментов данных при поступлении их с уровня АТМ (Segmentation and Reassemble – SAR).
На уровне АТМ осуществляются генерация (изъятие) заголовка ячейки, модификация в заголовке ячейки ИВП и ИВК, мультиплексирование и демультиплексирование.
На физическом уровне реализуются следующие основные функции:
вставка и изъятие пустых ячеек для согласования скорости передачи;
проверка наличия ошибок в заголовке;
синхронизация битов при передаче по физической среде;
определяет протокол размещения ячеек для передачи через физическую среду в кадрах различных цифровых систем передачи.
Таким образом, благодаря технологии АТМ все коммутационное оборудование становится однородным, решающим для всех видов информации одну и ту же задачу быстрой коммутации фиксированных пакетов, получивших название ячеек, и асинхронного временного разделения ресурсов, при котором множество виртуальных соединений с различными скоростями асинхронно мультиплексируются в едином физическом канале связи – цифровом тракте.
Организация связи в распределенных сетях базируется на принципах коммутации и реализуется в узлах, соединяющих два или несколько входящих и исходящих каналов в требуемых направлениях [5]. Классификация видов коммутации приведена на рисунке 4.1.
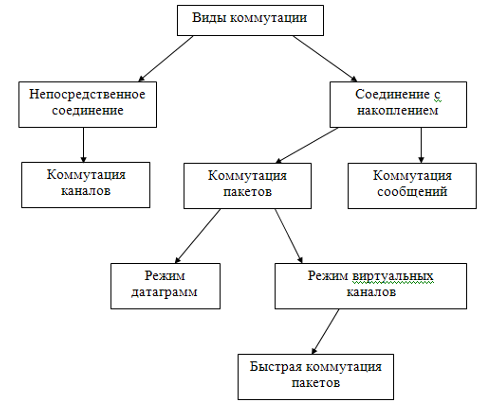
На рисунке два основных вида коммутации: непосредственное соединение и соединение с накоплением информации. При непосредственном соединении осуществляется физическое соединение входящих в узел коммутации каналов с соответствующими адресу исходящими каналами. При соединении с накоплением сообщений сигналы из входящих в узел коммутации каналов сначала записываются в буферное запоминающее устройство (БЗУ), а оттуда через определенный промежуток времени поступают в исходящие каналы.
При непосредственном соединении канал предоставляется пользователю на время сеанса связи с момента установления соединения до момента завершения работы и разъединения. Коммутация каналов – процедура далеко не гибкая, так как продолжительность временного интервала однозначно определяет скорость передачи в канале связи. Если в качестве основной принимать самую высокую скорость (которая способна обеспечить потребности любой службы), то в этом случае служба, которой необходима значительно меньшая скорость, будет занимать канал с высокой скоростью на все время соединения, а это приводит к очень низкой эффективности использования сетевых ресурсов. Поэтому обычная коммутация каналов не используется в Ш-ЦСИО.
Коммутация сообщений и коммутация пакетов относятся к соединению с накоплением информации. В случае коммутации сообщений все сообщение помещается в БЗУ, а через некоторый промежуток времени считывается в исходящие каналы в выбранном направлении. При коммутации пакетов все сообщения разбиваются в исходном узле на сравнительно небольшие части, называемые пакетами (при использовании АТМ – на ячейки длинной 53 байта) и затем эти пакеты передаются из одного узла сети в другой.
Существует два режима передачи пакетов: режим датаграмм и режим виртуальных каналов [5]. При датаграмном режиме каждый пакет информации содержит заголовок, в котором указывается адресная информация, необходимая для доставки пакета, который будет использоваться узлом назначения для сборки сообщения. Пакеты перемещаются в сети совершенно независимо друг от друга, при этом коммутатор может изменить маршрут какого-либо пакета в зависимости от состояния сети - работоспособности каналов и других коммутаторов, длины очередей пакетов в соседних коммутаторах и так далее. Метод датаграмм удобен тем, что не требует предварительного установления соединения, так как маршрут выбирается в процессе передачи каждого пакета, поэтому не возникает задержки перед передачей данных. Это особенно удобно для передачи небольшого объема данных, когда время установления соединения соизмерим со временем передачи данных.
Метод быстрой коммутации пакетов, который используется в Ш-ЦСИО, относится к режиму передачи пакетов по виртуальному каналу. В этом случае перед началом передачи данных получателю направляется служебный пакет, обеспечивающий виртуальное соединение [5]. При этом маршрут определяется по таблице маршрутизации, а фиксация маршрута осуществляется в таблицах коммутации, которые содержат информацию вида: пакеты k-го виртуального соединения, пришедшие из i-го канала, следует направлять в j-й канал. В памяти управляющего компьютера существует виртуальное (условное) соединение. Дойдя до абонента-получаетеля, служебный пакет запрашивает у него разрешение на передачу, сообщив, какой объем памяти понадобится для приема. Если компьютер располагает такой памятью и свободен, то посылается согласие обоненту-отправителю (также в виде специального служебного пакета) на передачу сообщения. Получив подтверждение, абонент-отправитель приступает к передаче сообщения обычными пакетами.
При быстрой коммутации пакетов ячейка, поступившая на вход коммутационной системы, характеризуется номером входного виртуального тракта и номером виртуального канала (поля ИВТ и ИВК в заголовке). Быстрая коммутация пакетов (БКП) состоит в выполнении следующих действий:
системы принятие входящей ячейки;
чтение заголовка ячейки (определение ИВТ и ИВК);
изменение ИВТ и ИВК в заголовке за счет обращения к таблице коммутации, информация в которую записана на этапе определения маршрута;
добавление к ячейке информации о маршрутировании в коммутационной системе, которая называется заголовок быстрого пакета; таким образом получают пакет быстрой коммутации, который поступает на один из входов коммутационной;
заголовок быстрого пакета самомаршрутизирует пакет быстрой коммутации через коммутационную систему и, следовательно, быстрый пакет поступает на требуемый исходящий виртуальный тракт и исходящий виртуальный канал (согласно таблице коммутации);
в выходном контроллере заголовок быстрого пакета изымается и, таким образом, быстрый пакет обратно преобразуется в ячейку.
Коммутаторы пакетной сети имеют буферное запоминающее устройство для временного хранения пакетов. Это связано с необходимостью разнесения во времени быстрых пакетов, одновременно поступивших на различные входы и требующих передачу на один и тот же выход.
Таким образом, при использовании БКП время, затраченное на установление виртуального канала, компенсируется быстрой последующей передачей всего потока пакетов. Пакеты беспрепятственно проходят друг за другом по виртуальному каналу (в каждом узле их ждет инструкция, которая обрабатывается управляющим компьютером) и в том же порядке попадают абоненту-получателю.
5 Маршрутизация. Основные определения
5.1 Общая классификация методов маршрутизации
Маршрут – это список узлов коммутации от узла-источника до узла-получателя. Маршрутизация – это набор процедур, позволяющих определить оптимальный маршрут по заданным параметрам на сети связи между парой узлов коммутации [9].

На рисунке 5.1 приведена общая классификация методов маршрутизации.
Маршрутизация делится на [2]:
централизованную, когда решающие функции закреплены за одним узлом, который посылает соответствующие команды основным узлам;
децентрализованную, когда каждый узел самостоятельно выбирает маршрут передачи (или ее направление) на основе собственной информации.
В зависимости от способа формирования таблиц маршрутизации алгоритмы маршрутизации делятся на три класса [2]:
алгоритмы фиксированной или статической маршрутизации;
алгоритмы простой маршрутизации;
алгоритмы адаптивной маршрутизации.
В алгоритмах фиксированной маршрутизации все записи в ТМ являются статическими. Все записи о том, какой маршрут выбран для передачи пакетов с теми или иными адресами, заносятся вручную самим администратором сети. если в таблицу требуется внести изменения, например, при отказе в какого-либо маршрутизатора в сети и возложении его функций на другой маршрутизатор, то они делаются вручную. Различают одномаршрутные таблицы, в которых для каждого адресата задан один маршрут, и многомаршрутные таблицы, определяющие несколько альтернативных путей для каждого адресата. В многомаршрутных таблицах должно быть задано правило выбора одного из маршрутов. Как правило, один путь является основным, а остальные резервные. Такой алгоритм маршрутизации применим только в небольших сетях с простой топологией, или для работы на магистральных крупных сетях, так как сама магистраль может иметь простую структуру с очевидными наилучшими путями следования пакетов в подсети, присоединенные к магистрали.
В алгоритмах простой маршрутизации таблицы маршрутизации(ТМ) или не используется, или строится без участия протоколов маршрутизации.
Существует три типа простой маршрутизации:
случайная маршрутизация, когда прибывший пакет посылается в первом попавшемся случайном направлении, кроме исходного;
лавинная маршрутизация, когда пакет широковещательно посылается по всем возможным направлениям, кроме исходного;
маршрутизация по предыдущему опыту, когда выбор маршрута осуществляется по таблице, но таблица строится путем анализа адресных полей пакетов, появляющихся на входных портах.
Самыми широко используемыми являются алгоритмы адаптивной или динамической маршрутизации. Эти алгоритмы обеспечивают автоматическое обновление ТМ после изменения конфигурации сети. Протоколы, построенные на основе этих алгоритмов, позволяют всем маршрутизаторам собирать информацию о топологии связей в сети, оперативно обрабатывая все изменения конфигураций связей.
К адаптивным алгоритмам маршрутизации предъявляется несколько требований:
обеспечение рациональности маршрута;
простота для того, чтобы их реализация не требовала слишком много сетевых ресурсов;
обладание свойством сходимости, то есть достижение однозначного результата за приемлемое время.
Адаптивные протоколы обмена маршрутной информацией делятся на две группы [10]:
дистанционно-векторные алгоритмы (DVA – Distance Vector Algorithms);
алгоритмы состояния связей (LSA – Link State Algorithms).
В алгоритмах дистанционно-векторного типа каждый маршрутизатор периодически и широковещательно рассылает по сети вектор, компонентами которого являются расстояния от данного маршрутизатора до всех известных ему сетей. Возможна и другая метрика, учитывающая не только число промежуточных маршрутизаторов, но и время прохождения пакета по сети между соседними маршрутизаторами. При получении вектора от соседа маршрутизатор наращивает расстояния до указанных в векторе сетей на расстояние до данного соседа. Получив вектор от соседнего маршрутизатора, каждый маршрутизатор добавляет к нему информацию об известных ему других сетях, о которых он узнал непосредственно или из аналогичных объявлений других маршрутизаторов, а затем снова рассылает новое значение вектора по сети. Таким образом каждый маршрутизатор узнает информацию о всех имеющихся в интерсети сетях и о расстоянии до них через соседние маршрутизаторы.
Дистанционно-векторные алгоритмы удобно использовать в небольших сетях. В больших сетях они засоряют линии связи интенсивным широковещательным трафиком, к тому же изменения конфигурации могут обрабатываться по этому алгоритму не всегда корректно, так как маршрутизаторы не имеют точного представления о топологии связей в сети, а располагают только обобщенной информацией – вектором дистанций, полученной через посредников.
Наиболее распространенным протоколом, основанным на DVA, является протокол RIP (Routing Internet Protocol).
Алгоритмы состояния связей обеспечивают каждый маршрутизатор информацией, достаточной для построения точного графа связей сети. все маршрутизаторы работают на основании одинаковых графов, что делает процесс маршрутизации более устойчивым к изменениям конфигурации. Широковещательная рассылка используется только при изменениях состояния связей, что происходит в надежных сетях нечасто. Вершинами графа являются как маршрутизаторы, так и объединяемые ими сети. Распространяемая по сети информация состоит из описания связей различных типов: маршрутизатор-маршрутизатор, маршрутизатор-сеть.
Чтобы понять, в каком состоянии находятся линии связи, маршрутизатор периодически обменивается короткими пакетами HELLO со своими ближайшими соседями. Этот служебный трафик тоже засоряет сеть, но в меньшей степени, чем протокол RIP, так как пакеты HELLO имеют намного меньший объем.
5.2 Формирование плана распределения информации
В общем случае маршрутизация состоит из трех этапов:
Формирование и коррекция плана распределения информации (ПРИ), то есть таблиц маршрутизации для каждого узла коммутации;
Формирование таблиц коммутации, обеспечивающих оптимальное для каждой службы маршруты доставки сообщений пользователей;
Передача информации пользователя.
Совокупность таблиц маршрутизации на сети называется планом распределения информации. Считается, что ПРИ задан, если определены все таблицы маршрутизации для каждого узла коммутации. Таблица маршрутизации представляет собой матрицу Мi, в которой число строк равно N-1, где N – число узлов коммутации сети (строка в матрице Mi для узла i не отводится), а число столбцов равно числу соседних с рассматриваемым узлом коммутации i узлов. Таблицы маршрутизации могут быть составлены по различным критериям: минимальное количество транзитных узлов, минимальная задержка при передаче пакетов, максимальная надежность и так далее.
Формирование плана распределения информации может быть централизованным, распределенным и комбинированным. В первом случае, сбор информации и составление таблиц маршрутизации для всей сети осуществляет один узел, а затем передает эти таблицы в каждый узел коммутации.
При распределенном методе формирования ПРИ каждый узел коммутации самостоятельно составляет таблицу маршрутизации, собирая информацию о состоянии сети и топологии связей. Однако, в случае большой распределенной сети формирование ПРИ таким образом потребует значительных затрат времени и ресурсов сети. Поэтому используют комбинированный способ формирования ПРИ. При этом структуру сети делят на сегменты, в каждом из которых ПРИ формируется либо централизованным, либо распределенным способом.
Кроме того ПРИ может быть статическим и динамическим. Если ПРИ меняется в процессе эксплуатации сети (то есть происходит переформирование ПРИ), то ПРИ называется динамическим, в противном случае – статическим. Динамические методы формирования ПРИ обеспечивают автоматическое обновление таблиц маршрутизации в дискретные моменты времени.
В настоящее время существует три основных способа формирования плана распределения информации: метод рельефов, игровой и логический а также совмещенный метод – логически-игровой.
Метод рельефов.
При использовании метода рельефов для каждого узла коммутации строится свой рельеф, на основе которого составляется таблица маршрутизации. Произвольно выбирается i-ый произвольный узел сети для формирования i рельефа. Из этого узла по всем исходящим трактам передачи сообщения пересылается число 1. Все узлы, в которые поступила 1, увеличивают ее значение на 1 (то есть получаем 2). Теперь уже эта 2 передается во все исходящие тракты. Эта процедура выполняется до тех пор, пока не будет охвачена вся структура сети. Таким образом, получается i рельеф.
Такой рельеф строится для каждого узла. Для выбора оптимального маршрута, по заданным критериям, между i-ым узлом и любым другим нужно выбирать наименьший вес.
Достоинства данного метода в том, что имеется полная информация о состоянии сети на момент формирования рельефа, можно определить исходящие линии связи (ИЛС) не только первого, но и второго, третьего и последующего выбора. Недостатки: большая загруженность сети, особенно при динамическом ПРИ, в случае ввода в эксплуатацию новых УК и в случае загруженности или неисправности сети потребуется переформировать ТМ.
Игровой метод.
Формирование ПРИ происходит по вероятности установления соединения между заданной парой узлов. Перед началом функционирования сети устанавливается начальный набор ТМ. Каждому значению элемента в этой таблице присваивается некоторый весовой коэффициент. При поиске маршрута к i-му УК приходит обращение к i-ым строкам ТМ. В i-ых строках определяется максимальный весовой коэффициент и следовательно выбирается исходящая ЛС. Если в результате маршрут между заданной парой узлов был определен, то весовые коэффициенты данных исходящих ЛС увеличиваются. А если маршрут не был найден, то весовые коэффициенты уменьшаются. После этого строки, в которых были изменены элементы, нормируются.
Достоинства данного метода: нет необходимости передачи служебной информации при формировании ПРИ, оптимизация по критерию – вероятность установления соединения между парой узлов. Отрицательные же стороны – это инерционность, то есть при выходе из строя элементов сети потребуется некоторый период времени для переформирования ТМ на сети, а также необходимость передачи служебной информации о переформировании ТМ при вводе в эксплуатацию новых узлов.
Логический метод.
В каждом УК выполняется процедура, которая позволяет определить исходящую ЛС максимально близкий к геометрическому направлению к узлу получателю. Для этого вся сеть связи помещается в прямоугольную систему координат. Каждому узлу присваиваются свои координаты (x,y). Затем происходит вычисление геометрического направления на заданный узел, путем сравнения своих координат с координатами узла получателя. После этой процедуры выбирается та ЛС, которая имеет наибольшее совпадение с вычисленным геометрическим направлением.
Достоинства: отсутствие служебной информации, простота алгоритма вычислений исходящей ЛС позволяет уменьшить объем оперативной памяти, так как нет необходимости использовать ТМ, упрощается процедура маршрутизации и ввода в эксплуатацию новых узлов. Недостатки: при выходе из строя элемента сети, то это явление не будет отмечено никакой информацией, так как этот метод не является динамическим, не учитываются возможности ранее забракованных из-за загруженности, но более предпочтительные направления.
Логически-игровой метод
Логически-игровой метод – это объединение двух методов: логического и игрового. Данный метод вобрал в себя достоинства обоих методов: отсутствие необходимости передачи служебной информации на сети при формировании (во время ввода в эксплуатацию УК), и переформирования уже в процессе эксплуатации УК таблиц маршрутизации. А так же решение задач глобальной оптимизации сети связи по критерию – формирование ПРИ по накопленной ранее статистике установления соединения между заданной парой УК.
Логически-игровой метод заключается в том, что сеть вводится в прямоугольную систему координат (логический метод), в соответствии, с которой каждому узлу сети присваивается собственный адрес (X,Y), и использует ранее накопленную статистическую информацию о состоявшихся разговорах (игровой метод). Следовательно, логический метод используется при вводе нового УК в эксплуатацию. В каждом УК сети имеется матрица, которая имеет следующий вид (таблица 5.2.1). Данная матрица содержит SN строк. Учитывая возможное увеличение числа УК на сети, SN выбирают таким, чтобы SN>J.
Количество столбцов матрицы PN(j) для УК под номером j равно: (Hj + 3), где Hj –число исходящих ЛС из j- го узла; три столбца отводится для номеров УП, представленных о общепринятой нумерации (№ УП) и прямоугольной системе координат (X,Y).
На момент ввода узла в эксплуатацию матрица содержит только информацию о смежных номерах УК с данными, выраженных в прямоугольной системе координат (т. е. координаты смежных УК). По мере функционирования сети связи матрица заполняется и корректируется.
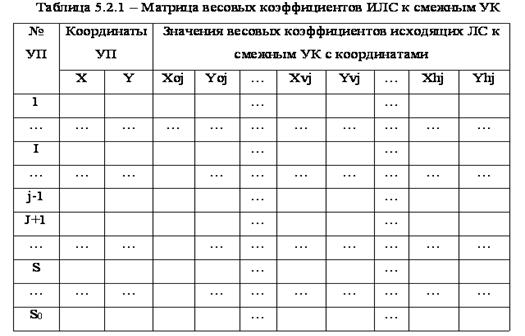
Определение исходящей ЛС осуществляется логическим методом, а заполнение и корректировка матрицы – игровым методом.
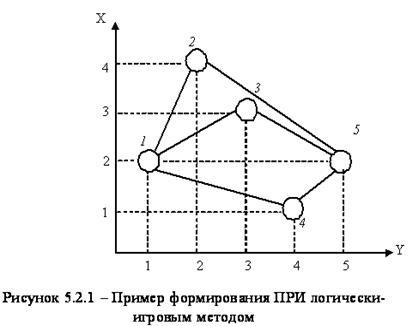
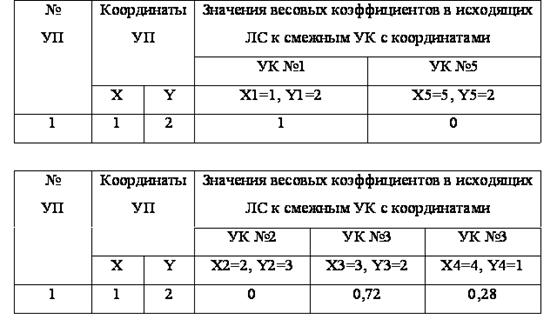
Рассмотрим пример формирования ПРИ на сети логически-игровым методом. Вложим структуру сети в прямоугольную систему координат (X,Y) (рисунок 5.2.1). Будем считать, что УП № 1, 2, 3, не эксплуатировались, поэтому их матрицы содержат информацию только о смежных узлах и имеют вид:
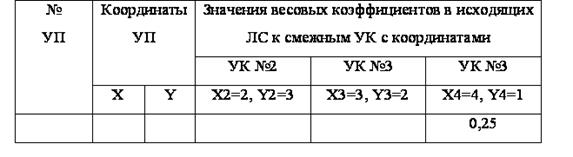
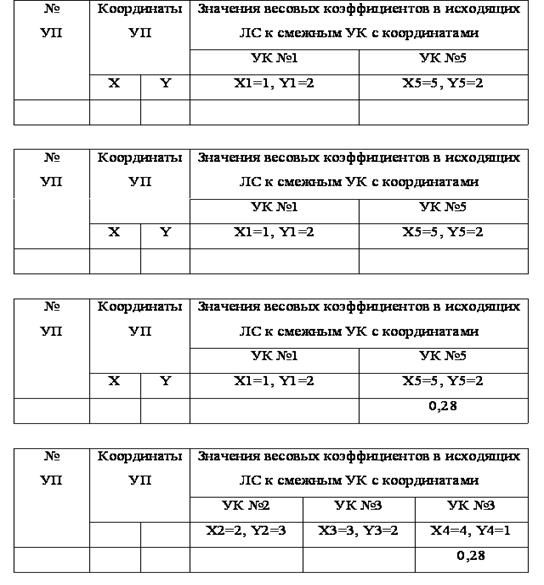
| №УП | Координаты УП | Значения весовых коэффициентов в исходящих ЛС к смежным УК с координатами | ||
| УК №1 | УК №5 | |||
| X | Y | X1=1, Y1=2 | X5=5, Y5=2 | |
| №УП | Координаты УП | Значения весовых коэффициентов в исходящих ЛС к смежным УК с координатами | ||
| УК №1 | УК №5 | |||
| X | Y | X1=1, Y1=2 | X5=5, Y5=2 | |
| №УП | Координаты УП | Значения весовых коэффициентов в исходящих ЛС к смежным УК с координатами | ||
| УК №1 | УК №5 | |||
| X | Y | X1=1, Y1=2 | X5=5, Y5=2 | |
| 0,28 | ||||
| №УП | Координаты УП | Значения весовых коэффициентов в исходящих ЛС к смежным УК с координатами | |||
| УК №2 | УК №3 | УК №3 | |||
| X2=2, Y2=3 | X3=3, Y3=2 | X4=4, Y4=1 | |||
| 0,28 | |||||
Допустим, что от пользователя УК № 2 с координатами X2=2, Y2=3 поступила заявка на организацию маршрута к УП № 1 с координатами X1=1, Y1=2. Причем, количество транзитных узлов не должно превышать двух
Этап 1. В УК № 2 на основе анализа координат смежных узлов (X1,Y1; X5,Y5) и координат УП (X1,Y1) делается вывод: исходящие ЛС к УК № 1 и УК № 2 являются ИЛС первого и второго выбора. Так как УК № 2 не эксплуатировался и не имеет статистике по организации маршрутов в предыдущие моменты времени, то первоначальные весовые коэффициенты исходящих ЛС будут одинаковыми и равными ½. Однако, предпочтительность выбора исходящих трактов сохраняется и соответствует результатам анализа координат данного узла и УП.
Предположим что исходящий тракт первого выбора в данный момент времени не доступен. Тогда проверяется ситуация доступности исходящего тракта второго выбора. Исходящая ЛС УК № 5 с координатами Х5=5, У5=2 доступен. Следовательно данный тракт участвует в организации данного маршрута.
Этап 2. В УК № 5 (Х5=5, У5=2) производится анализ координат смежных УК и определение исходящих ЛС первого, второго и третьего выбора. Ими будут исходящие ЛС к узлу УК № 3 и 4. с целью избежания зацикливания маршрутов ИЛС к УК № 2 из данной процедуры исключен.
Учитывая, что узел № 5 не имеет статистики организации маршрутов, то первоначальные весовые коэффициенты исходящей ЛС будет одинаково и равно ½. Предпочтительность выбора остается за исходящим трактом к УК № 3, т.к. он наиболее близок по направлению к УП № 1. Допустим, что данный тракт доступен.
Этап 3. В узле коммутации № 3 (Х3=3, У3=2) аналогично происходит анализ координат смежных узлов коммутации и определение исходящей ЛС первого выбора по направлению к УП № 1. Так как маршрут найден, то он имеет вид m21={УК № 2,УК № 5,УК № 3,УК № 1}. ЛС, участвующий в организации маршрута, поощряются (допустим на величину 0.2). Строки матриц узлов № 2,5,3 нормируются и окончательно принимают следующий вид:
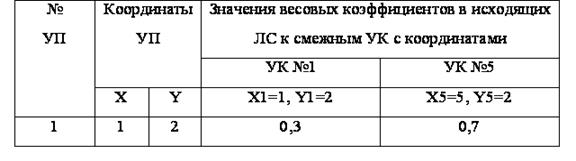
| №УП | Координаты УП | Значения весовых коэффициентов в исходящих ЛС к смежным УК с координатами | ||
| УК №1 | УК №5 | |||
| X | Y | X1=1, Y1=2 | X5=5, Y5=2 | |
| 1 | 1 | 2 | 0,3 | 0,7 |
| №УП | Координаты УП | Значения весовых коэффициентов в исходящих ЛС к смежным УК с координатами | ||
| УК №1 | УК №5 | |||
| X | Y | X1=1, Y1=2 | X5=5, Y5=2 | |
| 1 | 1 | 2 | 1 | 0 |
| №УП | Координаты УП | Значения весовых коэффициентов в исходящих ЛС к смежным УК с координатами | |||
| УК №2 | УК №3 | УК №3 | |||
| X | Y | X2=2, Y2=3 | X3=3, Y3=2 | X4=4, Y4=1 | |
| 1 | 1 | 2 | 0 | 0,72 | 0,28 |
Таким образом, в соответствующие строки матрицы УК № 2, 3, 5 внесены изменения о предпочтительности выбора исходящих ЛС при организации маршрута m 21 . Корректировка таблиц и предпочтительность выбора ИЛС в дальнейшем производится игровым методом.
5.3 Выбор исходящей линии связи
Выбор исходящей линии связи в узле коммутации может быть последовательным, параллельным и комбинированным. Если выбор исходящей линии связи последовательный, то в каждом узле коммутации, начиная с источника, осуществляется выбор только одной исходящей линии связи. На сети формируется только один маршрут, состоящий из последовательного наращивания коммутационных участков из узла-источника (УИ) к узлу-получателю(УП). А в параллельном методе поиск маршрута осуществляется одновременно по всем направлениям в ограниченной зоне сети связи. Комбинированный метод является совокупностью компонентов последовательного и параллельного методов.
Существует три основных класса последовательных алгоритмов выбора исходящих ЛС, которые определяются в зависимости от характера распространения по сети поиска маршрута: градиентный, диффузный, комбинированный. Градиентный метод характеризуется тем, что маршрут организуется на сети только в сторону УП. Диффузный метод маршрутизации допускает возможность выбора любых из доступных исходящих ЛС. В результате реализации градиентного алгоритма маршрутизации организуется короткий путь с минимальным числом узлов коммутации. Диффузный метод проигрывает по сравнению с градиентным из-за большей длины маршрута, но он более гибкий, то есть позволяет избегать поврежденные участки сети.
Процедура выбора ИЛС в каждом УК может быть детерминированный и стохастический (вероятностный). При использовании детерминированного метода выбор ИЛС осуществляется однозначно, по максимальному значению одного из элементов вектора. А в случае стохастического, метода выбор производится в результате случайного розыгрыша, причем ИЛС имеют большее значение в таблице маршрутизации и получают большую вероятность выбора. Сочетание элементов этих двух методов также дает комбинированный метод выбора ИЛС.
При выборе параллельного метода маршрутизации поиск маршрута между УИ и УП производится одновременно по всем направлениям в определенной зоне сети связи. При этом, однозначный выбор зоны для поиска маршрута по заранее выбранным критериям также будет называться детерминированным. А выбор зоны поиска маршрута, произведенный с помощью случайного розыгрыша – это вероятностный выбор.
К параллельным методам с детерминированным выбором зоны поиска маршрута относится волновой метод маршрутизации. Для установления связи между УИ и УП формируется поисковая посылка, которая адресуется всем соседним узлам коммутации, а там эта процедура повторяется. То есть поисковая посылка попадает во все узлы сети, причем через время, равное времени его передачи по кратчайшему маршруту. Но передача поисковой посылки во все стороны создает дополнительную нагрузку на сеть.
Локально-волновой метод устраняет недостаток волнового за счет того, что из УИ организуется волновой поиск, направленный только в сторону УП, при этом находится оптимальный маршрут.
6 Структурная схема маршрутизатора с использованием логически-игрового метода формирования плана распределения информации
6.1 Алгоритм работы маршрутизатора
Рассмотрим алгоритм работы маршрутизатора, который использует логически-игровой метод формирования ПРИ. Логический метод используется только тогда, когда в сеть вводится новый УК, а игровой метод используется для установления соединения уже эксплуатированных узлов коммутации. Основные преобразования осуществляются на втором подуровне маршрутизатора (подуровень формирования таблицы коммутации или подуровень сигнализации). Рассмотрим принцип работы маршрутизатора и функциональное назначение основных его блоков.

Структурная схема маршрутизатора состоит из шести основных блоков (рисунок 6.1):
фильтр входящей информации;
таблица маршрутизации;
вычисление весовых коэффициентов;
определение оптимального маршрута;
таблица коммутации;
виртуальный коммутатор (коммутатор ВК).
Фильтр входящей информации обрабатывает поступающую информацию. Он определяет, какого типа сообщения поступают на вход маршрутизатора (служебные или пользовательские). На выходе фильтра информации служебная информация поступает на блок вычисления весовых коэффициентов, а пользовательская информация поступает на вход виртуального коммутатора.
В таблице маршрутизации хранится информация о всех смежных УК. В каждой ячейки таблицы маршрутизации хранятся координаты смежного узла и весовой коэффициент, который показывает вероятность прохождения данного транзитного УК.
Схема
Вычисление весовых коэффициентов происходит в том случае, если в сеть был введен новый УК и в таблице маршрутизации коэффициенты имеют нулевое значение. А так же при нормировке вектора, который формируется в результате поиска оптимального маршрута. Вектор нормируется на величину ∆p, которая задается оператором или в процессе конструкции маршрутизатора.
Определение оптимального маршрута происходит в два этапа. Первый этап соответствует логическому методу формирования ПРИ, а второй – игровому методу формирования ПРИ. Метод выбирается в зависимости от типа УК. Если УК имеет нулевые весовые коэффициенты, то используется логический метод. Если УК имеет значение весовых коэффициентов, то используется игровой метод.
Таблица коммутации содержит информацию, которая была получена в результате поиска оптимального маршрута.
Коммутатор виртуальных каналов коммутирует ВК в соответствии с данными взятыми из ТК.
Рассмотрим работу структурной схемы более подробно.
Сообщения, поступающие на фильтр информации, разделяются на два типа: служебные и пользовательские. Пользовательская информация поступает на подуровень пользователя и пересылается по найденному маршруту. Служебная информация – это типы посылок, которые разделяются на три типа:
посылка на установление соединения;
посылка на отказ в установлении соединения;
посылка на установленное соединение (отбой).
После фильтра информации служебные сообщения поступают на декодер, и определяет тип посылки. Рассмотрим путь каждой посылки по отдельности. Посылка на установление соединения поступает на декодер. Так как в посылке имеется информация о пункте назначения, то декодер определяет, к какому УП следует найти маршрут. Затем посылка поступает на схему определения максимального коэффициента. Одновременно с этим сигнал поступает на блок определения наличия весового коэффициента, куда в это же время поступила информация из таблицы маршрутизации. Эта информация содержит весовые коэффициенты и координаты узла получателя.
Если весовые коэффициенты равны нулю, то в работу запускается логический метод поиска маршрута. Происходит поиск смежных УК. Затем формируется геометрическое направление. И после этого рассчитывается минимальный угол, на который смежное направление отклоняется от геометрического. Полученный в результате анализа исходящая ЛС, проверяется на доступность. Если линия свободна, то эта информация поступает в ТК и в ТМ, присваивая весовой коэффициент. Если тракт не доступен, то включается счетчик. В счетчике происходит сравнение номера смежной ИЛС (А) с общим числом смежных (В). Как только А=В будет сформирована посылка на отказ в установлении соединения.
Если значение весового коэффициента не равно нулю, происходит выбор максимального. После определения максимального коэффициента происходит чтение ИЛС. Если направление с максимальным коэффициентом свободно, то посылка передается на следующий блок. Если же это направление занято, то берется следующий весовой коэффициент, который меньше максимального, но больше всех остальных. Далее следует проверка на доступность, например, k-ого ИЛС. Если данное направление свободно, то происходит увеличение k-ого коэффициента. Если нет, то коэффициент уменьшается. Увеличение или уменьшения весового коэффициента происходи на некоторую величину ∆p, которая задается оператором или при конструировании маршрутизатора. После определения направления и преобразований весовых коэффициентов происходит нормировка вектора (геометрического направления). Измененные весовые коэффициенты заносятся в таблицу маршрутизации.
Найденное направление поступает на блок «проверка на узел получателя», и параллельно с этим происходит заполнение таблицы коммутации. Проверка на узел получателя необходима, так как нужно определить по какому направления дальше будет посылаться информация. Если данный маршрутизатор транзитный, то формируется посылка установление соединения будет направлена в ИЛС к другому маршрутизатору. Если данный маршрутизатор последний, то формируется посылка на установление соединения и направляется абонентский пункт (АП) вызываемого пользователя
При поступлении посылки на отказ в установлении соединения происходит изменение в таблице коммутации. То есть происходит обнуление того направления, по которому пришли ячейки.
Поступившая посылка отбоя поступает на дешифратор, где определяется, от какого вызывающего пользователя поступила заявка на установление соединения. В соответствии с этим в таблицу коммутации будут внесены изменения. То есть при занятии тракта передачи будет внесена информация, что данный тракт занят. При освобождении тракта будет внесена информация, что данный тракт свободен.
Пользовательская информация поступает на виртуальный коммутатор, который состоит из контроллера, формирования БКП (присоединение нового заголовка), коммутационной системы и кодера. Заявка поступает на контроллер, где происходит обращение к ТК. Из ТК будет считана информация о найденном направлении. Эта информация будет присоединена новым заголовком к сообщению пользователя. Полученная новая ячейка будет отправлена через коммутационную систему в ИЛС или в АП вызываемого пользователя.
7 Безопасность жизнедеятельности
Так как большая часть дипломной работы выполняется на компьютере, то в данном разделе мы рассмотрим некоторые вопросы охраны труда при работе с ЭВМ.
7.1 Общий обзор вредных факторов
Операторы электронных вычислительных машин (ЭВМ) сталкиваются с воздействием таких физических и психологических опасных факторов, как повышенная температура внешней среды, отсутствие или недостаток естественного света, недостаточная освещённость рабочей зоны, электрический ток, статическое электричество, умственное перенапряжение, перенапряжение зрительных анализаторов, монотонность труда, эмоциональные перегрузки.
Основным источником проблем, связанных с охраной здоровья людей, использующих в своей работе персональные компьютеры, являются дисплеи с электронно-лучевыми трубками (ЭЛТ). Они представляют собой источники наиболее вредных излучений, неблагоприятно влияющих на здоровье операторов. Существует два типа излучений, возникающих при работе монитора [1]:
электростатическое;
электромагнитное.
Первое возникает в результате облучения потоком заряженных частиц. Неприятности, вызванные им, связанные с пылью, накапливающейся на электростатически заряжённых экранах, которая летит на пользователя во время его работы за дисплеем. Электромагнитное излучение создаётся магнитными катушками отклоняющей системы, находящимися около цокольной части ЭЛТ. Специальные измерения показали, что невидимые силовые поля появляются даже вокруг головы оператора во время его работы за дисплеем. Допустимые нормы для этих параметров представлены ниже [1]:
Мощность экспозиционной дозы рентгеновского излучения на расстоянии 0,05 м вокруг видеомонитора – 100мкР/час.
Электромагнитное излучение на расстоянии 0,5 м вокруг видеомонитора
по электрической составляющей:
в диапазоне 5Гц-2 кГц – 25 В/м;
в диапазоне 2-400 кГц – 2,5 В/м.
по магнитной составляющей:
в диапазоне 5 Гц-2 кГц – 250 нТл;
в диапазоне 2-400 кГц – 25 нТл.
3. Поверхностный электростатический потенциал – не более 500 В.
Человеку, вероятно, уже никогда не удастся полностью избежать пагубного влияния передовых технологий, но можно свести его к минимуму. Большинство проблем решается при правильной организации рабочего места, соблюдении правил техники безопасности и разумном распределении рабочего времени.
Благодаря существующим достаточно строгим стандартам дозы рентгеновского излучения от современных видеомониторов не опасны для большинства пользователей. Исключение составляют люди с повышенной чувствительностью к нему. Также считается, что интенсивность электромагнитного излучения не представляет опасности для здоровья человека. Но до тех пор, пока не будут проведены тщательные исследования по комплексному изучению воздействия излучений на организм человека, рекомендуется принимать следующие меры предосторожности: ограничить дневную продолжительность рабочей деятельности перед монитором, использовать отражающие и поглощающие экраны, не размещать мониторы концентрированно в рабочей зоне, выключать монитор, если на нём не работают.
В компьютере существует очень важная часть, на которую очень редко обращают внимание программисты, но именно она больше всего влияет на здоровье – это монитор.
Основными параметрами изображения на экране монитора являются яркость, контраст, размеры и форма знаков, отражательная способность экрана, наличие или отсутствие мерцаний. Кроме того, в СанПиН включены нормативы еще для нескольких параметров, характеризующих форму и размеры рабочего поля экрана, геометрические свойства знаков и другие.
Яркость изображения (имеется в виду яркость светлых элементов, т. е. знака для негативного изображения и фона для позитивного) нормируется для того, чтобы облегчить приспособление глаз к самосветящимся объектам. Ограничены также в пределах (25%) и колебания яркости. Нормируется внешняя освещенность экрана (100 - 250 лк). Исследования показали, что при более высоких уровнях освещенности экрана зрительная система утомляется быстрее и в большей степени.
Часто фактором, способствующим быстрому утомлению глаз, становится и контраст между фоном и символами на экране. Малая контрастность затрудняет различение символов, однако, и слишком большая тоже вредит. Поэтому контраст должен находиться в пределах от 3:1 до 1,5:1. При более низких уровнях контрастности у работающих быстрее наступали неблагоприятные изменения способности фокусировать изображение и критической частоты слияния световых мельканий, регистрировалось больше жалоб на усталость глаз и общую усталость.
Человеческий глаз не может долго работать с мелкими объектами. Вот почему нормируются размеры знаков на экране. Например, угловой размер знака должен быть в пределах от 16 до 60 угловых минут, что составляет от 0,46 до 1,75 см, если пользователь смотрит на экран с расстояния 50 см (минимальное расстояние).
Отражательная способность экрана не должна превышать 1%. Для снижения количества бликов и облегчения концентрации внимания корпус монитора должен иметь матовую одноцветную поверхность (светло-серый, светло-бежевый тона) с коэффициентом отражения 0,4-0,6, без блестящих деталей и с минимальным числом органов управления и надписей на лицевой стороне.
Основные нормируемые визуальные характеристики мониторов и соответствующие допустимые значения этих характеристик представлены ниже [1, 4]:
Яркость знака или фона (измеряется в темноте): 35 – 120 кд/м2;
Контраст: от 3:1 до 1,5:1;
Угловой размер знака: 16 – 60;
Отношение ширины знака к высоте: 0,5 – 1,0;
Отражательная способность экрана (блики): не более 1%.
7.3 Правильная организация рабочего места
Рабочее место – это оснащённое техническими средствами пространство, где осуществляется деятельность исполнителя. Организацией рабочего места называется система мероприятий по оснащению рабочего места средствами и предметами труда и размещение их в определённом порядке. Совершенствование организации рабочего места является одним из условий, способствующих повышению производительности труда.
Для обеспечения нормальных условий труда, санитарные нормы устанавливают для взрослых пользователей на одно рабочее место с компьютером площадь производственного помещения не менее 6,0 м2, а объём – не менее 20,0 м3 [11]. Организация рабочего места включает антропометрические и биологические характеристики человека, выбор физиологически правильного рабочего положения и рабочих зон, рациональную компоновку рабочего места, учёт факторов внешней среды.
Антропометрические характеристики человека определяют габаритные и компоновочные параметры рабочего места и свободные параметры отдельных его элементов.
Положение тела и наиболее частые позы, которые принимает или вынужден принимать человек при выполнении работы, являются одним из основных факторов, определяющих производительность труда. Работу оператора организуют в положении сидя. При этом основная нагрузка падает на мышцы, поддерживающие позвоночный столб и голову, а подавляющая часть массы тела передаётся на бёдра, препятствуя проникновению крови в нижнюю часть тела. Поэтому при длительном сидении время от времени необходимо смещать массу тела и сменять фиксированные рабочие позы. К тому же при работе сидя обычно естественный спинно-поясничный прогиб вперёд изменяется на изгиб назад, что зачастую является причиной болей в пояснице. Для физиологически правильно обоснованного рабочего положения сидя рекомендуется обеспечить следующие оптимальные положения частей тела: корпус выпрямлен, сохранены естественные изгибы позвоночного столба, нет необходимости в сильных наклонах туловища, поворотах головы и крайних положениях суставов конечностей.
Основными элементами рабочего места являются: рабочее кресло, рабочая поверхность, экран монитора и клавиатура. Рабочее кресло обеспечивает поддержание рабочей позы в положении сидя, и чем дольше это положение в течении рабочего дня, тем настоятельнее требования к созданию удобных и правильных рабочих сидений. Можно дать следующие рекомендации по конструированию рабочего кресла: необходимость регулировки наиболее важных его элементов – высоты сиденья, высоты спинки сиденья и угла наклона спинки, причём процесс регулировки не должен быть сложным. Установка правильной высоты сиденья является первоочередной задачей при организации рабочего места, так как этот параметр определяет прочие пространственные параметры – высоту положения экрана, клавиатуры, поверхности для записей и других. Диапазон регулировки высоты сиденья находится в пределах 380-500 мм. Регулируемая высота рабочей поверхности оптимальна в пределах 670-800мм. Высота нижнего ряда клавиатуры от плоскости пола может быть в пределах 620-700 мм [1]. Передний ряд клавиш располагают таким образом, чтобы клавиатуру можно было без труда, обслуживать слегка согнутыми пальцами при свободно опущенных плечах и горизонтальном положении рук, плечо и предплечье образуют при этом угол в 90 градусов. Высота экрана определяется высотой уровня глаз наблюдателя и требованием перпендикулярности плоскости экрана к нормальной линии взора.
При компоновке рабочего места, оборудованного компьютером, в первую очередь исходят из типа выполняемых задач и длительности работы. Нельзя создать фиксированную и при этом оптимальную компоновку, которая была бы удобной для всех пользователей. Если производится работа только по вводу данных, то экран и клавиатуру удобно располагать на одной линии, а документ – слева от клавиатуры. Для задач, требующих длительных записей, внесения поправок в документ, документ и экран могут размещаться на одной линии, а клавиатура смещается вправо или экран и клавиатура остаются на одной линии, а документ переносится вправо от клавиатуры. Следовательно, наиболее правильный путь – это компоновка основных элементов рабочего места по желанию пользователя.
Любая работа выполняется в определённой рабочей среде, где одновременно проявляются много различных факторов, воздействующих на организм человека. Рассмотрение рабочей среды как единого целого не исключает необходимости изучения отдельных её составляющих и их нормирования.
Освещение рабочего места. В наибольшей степени отрицательное физиологическое воздействие на операторов ЭВМ связано с зрительными условиями из-за неправильно спроектированного освещения: прямые и отражённые от экрана блики, вуалирующие отражения, неблагоприятное распределение яркости в поле зрения, неверная ориентация рабочего места относительно светопроёмов.
К системам освещения предъявляют следующие требования:
соответствие уровня освещенности рабочих мест характеру выполняемой зрительной работы;
достаточно равномерное распределение яркости на рабочих поверхностях и в окружающем пространстве;
отсутствие резких теней, прямой и отраженной блесткости (повышенной яркости светящихся поверхностей, вызывающей ослеплённость);
постоянство освещенности во времени;
оптимальная направленность излучаемого осветительными приборами светового потока;
долговечность, экономичность, электро и пожаробезопасность,
эстетичность, удобство и простота эксплуатации.
Рекомендуемая освещенность для работы с экраном дисплея составляет 200 лк, а при работе с экраном в сочетании с работой над документами - 400 лк. Рекомендуемые соотношения яркости между рабочими поверхностями не должно превышать 3:1 – 5:1 [1].
В дисплейных залах, обычно, применяют одностороннее естественное боковое освещение. Мониторы располагают подальше от окон и таким образом, чтобы окна находились сбоку.
Если экран дисплея расположен к окну, необходимы специальные экранирующие устройства (светорассеивающие шторы, регулируемые жалюзи, солнцезащитная пленка с металлизированным покрытием).
Для искусственного освещения дисплейных помещений лучше использовать люминесцентные лампы, так как у них высокая световая отдача (до 75 лм/Вт и более), продолжительный срок службы (до 10000 часов), малая яркость светящейся поверхности, близкий к естественному спектральный состав излучаемого света, что обеспечивает хорошую цветопередачу.
Для исключения засветки экранов дисплеев прямыми световыми потоками светильники общего освещения располагают сбоку от рабочего места, параллельно линии зрения оператора и стене с окнами. Такое размещение светильников позволяет производить их последовательное включение в зависимости от величины естественной освещенности и исключает раздражение глаз чередующимися полосами света и тени, возникающее при поперечном расположении светильников.
Требования к микроклимату. Микроклиматические параметры влияют на функциональную деятельность человека, его самочувствие и здоровье и на надёжность работы средств вычислительной техники. Особенно большое влияние на микроклимат оказывают источники теплоты, находящиеся в помещении. Основными источниками теплоты в дисплейных залах являются: ЭВМ, приборы освещения, обслуживающий персонал, а также солнечная радиация. Основным тепловыделяющим оборудованием в дисплейном зале является ЭВМ – в среднем до 80% суммарных выделений. Тепловыделения от приборов освещения составляют в среднем 12%. Поступление теплоты от обслуживающего персонала -1%, от солнечной радиации - 6%, приток теплоты через непрозрачные ограждающие конструкции – 1%. Эти источники теплоты являются постоянными.
На организм человека и работу компьютеров оказывает влияние относительная влажность воздуха. При относительной влажности воздуха более 75-80% снижается сопротивление изоляции, изменяются рабочие характеристики элементов ЭВМ, возрастает интенсивность отказов элементов ЭВМ. Скорость движения воздуха также оказывает влияние на функциональную деятельность человека и работу высокоскоростных устройств печати. Большое влиянием на самочувствие и здоровье операторов ЭВМ, а также на работу устройств ЭВМ (магнитные ленты, магнитные диски, печатающие устройства) оказывает запыленность воздушной среды.
С целью создания нормальных условий для операторов ЭВМ установлены нормы микроклимата (ГОСТ). Эти нормы устанавливают оптимальные и допустимые значения температуры, относительной влажности и скорости движения воздуха в дисплейных помещениях с учетом избытков явной теплоты, тяжести выполняемой работы и сезонов года.
Под оптимальными микроклиматическими параметрами принято понимать такие, которые при длительном и систематическом воздействии на человека обеспечивают сохранение нормального функционального и теплового состояния организма без напряжения реакции терморегуляции, создают ощущение теплового комфорта и являются предпосылкой высокого уровня работоспособности.
Допустимые микроклиматические параметры могут вызвать преходящие и быстро нормализующиеся изменения функционального и теплового состояния организма и напряжения реакций терморегуляции, не выходящие за пределы физиологических приспособительных возможностей, не создающие нарушений состояния здоровья, но вызывающие дискомфортные тепло ощущения, ухудшение самочувствия и понижение работоспособности. Нормальные условия микроклимата обеспечиваются системами водяного отопления, вентиляции и кондиционирования воздуха.
Требования по электробезопасности. Электроустановки, к которым относится практически все оборудование ЭВМ, представляют для человека большую потенциальную опасность, так как в процессе эксплуатации или проведения профилактических работ человек может коснуться частей, находящихся под напряжением. Специфическая опасность электроустановок: токоведущие проводники, корпуса стоек ЭВМ и прочего оборудования, оказавшегося под напряжением в результате повреждения (пробоя) изоляции, не подают каких-либо сигналов, которые предупреждали бы человека об опасности. Реакция человека на электрический ток возникает лишь при протекании последнего через тело человека.
Таким образом, лаборатория является помещением с повышенной опасностью поражения людей электрическим током. В связи с этим применяются следующие меры защиты от поражения электрическим током:
все токоведущие детали изолированы диэлектриком и к ним нет прямого доступа;
защитное зануление;
использование общего выключателя, при помощи которого в нужный момент можно прекратить подачу напряжения на все установки.
При прикосновении к любому из элементов ЭВМ могут возникнуть разрядные токи статического электричества. Такие разряды не представляют опасности для человека, однако, могут привести к выходу из строя ЭВМ. Для снижения величин возникающих зарядов в дисплейных залах применяют покрытие технологических полов из однослойного поливинилхлоридного антистатического линолеума марки АСК.
Еще одним методом защиты является нейтрализация статического электричества ионизированным газом. Можно также применить общее и местное увлажнение воздуха.
Воздействие шума. Установлено, что шум неблагоприятен для человека, особенно при длительном воздействии. У оператора это выражается в снижении работоспособности, в ускорении развития зрительного утомления, изменении цветоощущения, повышения расхода энергии и так далее. Шум на рабочих местах создаются внутренними источниками: техническими средствами, компрессорами и так далее.
Рекомендуется, чтобы шум в помещении, где выполняют работу, требующую концентрации внимания, не превышал 55 дБ, а при однообразной работе – 65 дБ [4]. Шум отдельных приборов не должен более чем на 5 дБ превышать фоновый шум. Для снижения шума, следует:
ослабить шум самих источников, в частности, предусмотреть применение в их конструкциях акустических экранов, звукоизолирующих кожухов;
применять рациональное расположения оборудования;
использовать архитектурно-планировочные и технические решения, направленные на изоляцию источников шума.
Пожарная безопасность. Одна из возможных чрезвычайных ситуаций, которая может возникнуть при работе с компьютером – это пожар. Пожар – это неконтролируемое горение вне специального очага, наносящее материальный ущерб и создающее угрозу жизни и здоровью людей. Опасными факторами пожара являются: открытый огонь и искры, повышенная температура воздуха и окружающих предметов, токсичные продукты горения, пониженная концентрация кислорода в воздухе, а также обрушение и повреждение зданий, сооружений, установок. Горение представляет собой сложное, быстропротекающее химическое превращение, сопровождающиеся выделением большого количества теплоты, как правило, свечением. Для возгорания необходимы наличие горючего воздуха (окислителя, чаще всего кислорода) и источника воспламенения.
В современных ЭВМ очень высока плотность размещения элементов электронных схем. В непосредственной близости друг от друга располагаются соединительные провода, коммуникационные кабели. При протекании по ним электрического тока выделяется значительное количество теплоты, что может привести к повышению температуры отдельных узлов до 80 – 1000С. При этом возможно оплавление изоляции соединительных проводов, их оголение и, как следствие, короткое замыкание, сопровождаемое искрением, которое ведёт к недопустимым перегрузкам элементов электронных схем. Они, перегреваясь, сгорают, разбрызгивая искры. Как известно, для отвода избыточной теплоты от ЭВМ служат системы вентиляции и кондиционирования воздуха. Однако, мощные, разветвлённые, постоянно действующие системы вентиляции и кондиционирования – дополнительная пожарная опасность, так как, с одной стороны, воздуховоды обеспечивают подачу кислорода-окислителя во все помещения, а с другой – при возникновении пожара быстро распространяют огонь и продукты горения ко всем помещениям и устройствам, с которыми они связаны.
Напряжение к ЭВМ подаётся по кабельным линиям, которые представляют особую пожарную опасность. Наличие горючего изоляционного материала, вероятных источников зажигания в виде электрических искр и дуг, разветвлённость и труднодоступность делают кабельные линии местом наиболее вероятного возникновения и развития пожара.
Следовательно, при эксплуатации ЭВМ необходимо принимать меры пожарной профилактики. Пожарная профилактика – это комплекс организационных и технических мероприятий, направленных на обеспечение безопасности людей, на предотвращение пожара, а также на создание условий для успешного тушения пожара. К мерам борьбы с пожарами относятся своевременные профилактические осмотры и ремонт оборудования, правильное размещение оборудования, противопожарный инструктаж работников, соблюдение противопожарных норм и правил при проектировании, устройстве электропроводов и оборудования, отопления, вентиляции, освещения.
Таким образом, в данном разделе мы рассмотрели правила охраны труда при работе с компьютером: изучили опасные и вредные факторы и степень их воздействия на оператора, проанализировали принципы организации рабочего места оператора, уделили особое внимание рассмотрению рабочей среды. Дипломная работа выполнялась в дисплейном классе кафедры РТС. Данное помещение соответствует современным требованиям обеспечения безопасности жизнедеятельности человека при работе с компьютером.
8 Расчет экономических показателей схемы маршрутизатора
8.1 Расчет себестоимости и цены схемы маршрутизатора
Для определения затрат на разработку программного продукта используется метод экспертных оценок. Предварительно разбиваем весь процесс создания программного продукта на этапы. После этого оцениваем временные затраты на каждом этапе. В общем случае разработка программного продукта условно делится на три этапа:
анализ существующих методов маршрутизации;
разработка алгоритма работы маршрутизатора в гидроакустических сетях;
разработка и описание схемы маршрутизатора.
Подробнее процесс разработки можно описать так:
уточнение задач;
последовательность выполнения задач;
анализ методов маршрутизации;
разработка алгоритма работы маршрутизатора в ГА сетях;
разработка и описание схемы маршрутизатора.
Себестоимость схемы маршрутизатора рассчитывается по следующей формуле:
С = (З/m) * k * t (1+ kн) + 10 * t * Cм; (8.1)
где:
З – среднемесячная зарплата инженера (1500 руб.);
m – количество рабочих дней в месяце (m=21);
k – коэффициент, учитывающий отчисления в виде единого социального налога (k=1.356)
пенсионный фонд – 28%;
фонд медицинского страхования – 3,6%;
фонд социального страхования – 4%;
Общее количество отчислений – 35,6%.
t – время, затраченное разработчиком на создание проекта с использованием ПК;
kн – коэффициент, учитывающий накладные расходы (поддержание в рабочем состоянии, помещение) (kн=2);
См – стоимость одного часа машинного времени (См=15 руб.).
Оценку временных затрат проводили два эксперта (руководитель дипломного проекта и автор работы). По каждому этапу разработки проекта экспертами были даны оценки для следующих ситуаций:
Наименее возможная величина временных затрат (аi);
Наиболее вероятная величина временных затрат (мi);
Наиболее возможная величина временных затрат (вi).
Величины оценок даны в днях и представлены в таблице 8.1 с учетом, что речь идет о восьмичасовом рабочем дне (1 час = 0,125 дня)
Таблица 8.1 – Экспертные и средние оценки затрат времени на разработку проекта схемы маршрутизатора для ГА сети связи.
| Этапы разработки проекта | Наименее возможная (средняя) величина затрат времени (в днях) | Наиболее вероятгная (средняя) величина затрат времени (в днях) | Наиболее возможная (средняя) величина затрат времени (в днях) | ||||||
| tр | tа | tср | tр | tа | tср | tр | tа | tср | |
| 1. Уточнение задач | 0,1 | 0,2 | 0,14 | 0,15 | 0,25 | 0,19 | 0,2 | 0,3 | 0,24 |
| 2.Последовательность выполнения задач | 1 | 1,2 | 1,08 | 1,6 | 1,8 | 1,68 | 2 | 2,1 | 2,04 |
| 3.Анализ методов маршрутизации | 21 | 23 | 21,8 | 25 | 26 | 26,8 | 30 | 35 | 32 |
| 4. Разработка алгоритма работы маршрутизатора в ГА сетях | 14 | 17 | 15,2 | 18 | 19,5 | 18,5 | 20 | 21 | 20,4 |
| 5. Разработка и описание схемы маршрутизатора | 10 | 14 | 11,6 | 15 | 17 | 15,8 | 18 | 21 | 19,2 |
Среднее время рассчитывается по формуле:
tср = (3tp + 2ta)/5; (8.2)
где:
tр – оценка времени данная руководителем;
tа – оценка времени данная создателем проекта;
tср – среднее время, полученное на основании экспертных оценок.
На основании средних оценок рассчитывается математическое ожидание и стандартное отклонение по каждому этапу создания проекта.
Формула для расчета математического ожидания для i-го этапа разработки схемы:
МOi = (аi + 4мi + bi)/6; (8.3)
где
аi – наименее возможная (средняя) величина затрат времени;
мi – наиболее вероятная (средняя) величина затрат времени;
bi – наиболее возможная (средняя) величина затрат времени.
Формула для расчета стандартного отклонения для i-го этапа разработки проекта:
Gi = (bi – ai)/6; (8.4)
где:
ai – наименее возможная (средняя) величина затрат времени;
bi – наиболее возможная (средняя) величина затрат времени.
Вычислив математическое ожидание и стандартное отклонение для каждого этапа разработки проекта, можно перейти к расчету общей величины математического ожидания и стандартного отклонения в целом:
МО = SМОi; (8.5)
G = ÖSGi (8.6)
где:
МО – математическое ожидание в целом по созданию проекта;
G – стандартное отклонение в целом по созданию проекта
Для оценки согласованности мнений экспертов рассчитывается коэффициент вариаций по следующей формуле:
n = G/МО; (8.7)
где:
G - стандартное отклонение;
МО – величина затрат времени.
Если n <= 0.3, то мнения экспертов согласованы.
Результаты вычислений средних величин затрат времени, математического ожидания, стандартного отклонения и согласованности мнений экспертов представлены в таблице 8.2.
Таблица 8.2 – Средние величины затрат времени, математического ожидания, стандартного времени и согласованности мнений эвкспертов
| Этапы разработки проекта | Средняя величина затрат времени по этапам разработки проекта (в днях) | Математическое ожидание затрат времени (в днях) | Стандартное отклонение (в днях) | Согласованность мнений экспертов | ||
| Наименее возможная величина затрат времени (в днях) | Наибо лее вероятная величина затрат времени (в днях) | Наиболее возможная величина затрат времени (в днях) | ||||
| 1. Уточнение задач | 0,14 | 0,19 | 0,24 | 0,19 | 0,017 | 0,09 |
| 2 .Последовательность выполнения задач | 1,08 | 1,68 | 2,04 | 1,64 | 0,16 | 0,1 |
| 3.Анализ методов маршрутизации | 21,8 | 26,8 | 32 | 26,83 | 1,7 | 0,06 |
| 4. Разработка алгоритма работы маршрутизатора в ГА сетях | 15,2 | 18,5 | 20,4 | 18,27 | 0,87 | 0,05 |
| 5. Разработка и описание схемы маршрутизатора | 11.6 | 15,8 | 19,2 | 15,67 | 1,27 | 0,08 |
| Итого: | 49,82 | 62,97 | 73,88 | 62,6 | 4,01 | 0,06 |
Далее вычисляем затраты времени:
t = SМОi = МО = 62,6 дней
Себестоимость проекта схемы маршрутизатора для гидроакустической сети связи, рассчитанная по формуле (8.1) равна:
С = (1500/21) * 1,356 * 62,6 * (1 + 2) + 8 * 62,6 * 15 = 25701,77 руб.
Цена готового проекта рассчитывается по формуле:
Ц = C * (1 + Р/100); (8.7)
где:
С – себестоимость проекта схемы рассчитанная по формуле (8.1);
Р – рентабельность (Р = 20%).
Цена готового проекта равна:
Ц = 25701,77 * (1 + 20/100) = 30842,12 руб.
8.2 Оценка эффекта использования схемы маршрутизатора в ГА сетях связи
Маршрутизация – это одна из важнейших функций управления сетью связи. Она позволяет значительно повысить эффективность использования аппаратуры передачи информации, поэтому применение данной схемы необходимо в ГА сети.
Несмотря на многие достижения в области гидроакустики подводные сети связи отличаются низкой пропускной способностью акустических каналов передачи, высоким временем ожидания (так как низка скорость распространения звука), высоким потреблением энергии, высоким уровнем шумов. Применение схемы маршрутизатора направлено на то, чтобы как можно более эффективно использовать ресурсы сети, уменьить количество потребляемой энергии, снизить время ожидания пакетов информации.
В каждом узле коммутации сети находится таблица маршрутизации, содержащая список соседних узлов и качество их соединения. Эти таблицы собираются главным узлом, и в нем производится формирование дерева маршрутизации. Состояние соединений постоянно меняется в завистмости от изменений среды передачи, поэтому и количство модификаций маршрутов очень велико. Выбор оптимальных параметров передачи производится автоматически.
Методы маршрутизации позволяют определить самый короткий путь для пакетов данных. К тому же, каждому соединению в сети назначается стоимость, в зависимости от расстояния и уровня перегрузок. Алгоритм позволяет найти путь с самой низкой стоимостью от узла-источника до узла-получателя.
Некоторыми протоколами маршрутизации предусматривается отправка сигнала-запроса на информацию о состояние соединения. Если узел получает ответную положительную информацию, то он начинают передачу пакетов данных. Это позволяет избежать потери информации.
Если возникают какие-то ошибки при передаче, то узел-получатель подает запрос на повторную передачу пакетов. Этот подход позволяет увеличить пропускную способность сети, так как устраняется потребность посылать квитанции на каждый отправленный пакет.
Иногда требуется очень быстро разворачивать подводную сеть без особого планирования. Сеть должна самостоятельно определять расположение узлов и обладать способностью самоконфигурирования. Это повысит эффективность передачи данных, особенно если речь идет об изменении состояния канала передачи или выходе из строя некоторых узлов. В подобной ситуации сеть должна изменить свою конфигурацию, чтобы сохранить работоспособность. Для маршрутизации используются инетллектуальные алгоритмы, которые позволяют сети адаптироваться к изменениям условий среды. Постоянное обновление маршрутов дают возможность сети адаптироваться к измененяющимся условиям без прерывания передачи данных.
Изменения в дереве маршрутизации передается всем узлам, а это гарантирует, что вышедшие из строя соединения не будут использоваться. Это позволяет избежать ненужных передач, которые увеличивают потребление энергии батареи. Протоколы маршрутизации максимизируют срок службы батареи, питающей сеть, путем минимизации потребления энергии сетью.
Таким образом, применение маршрутизации позволяет гораздо более эффективно использовать ресурсы сети и при этом значительно сэкономить средства на ее создание, поддержание работоспособности и функционирования.
Список сокращений на английском языке
AAL (ATM Adaptation Layer) – уровень адаптации АТМ
ARQ () -
ATM (Asinchronous Transfer Mode) – асинхронный метод передачи
CDMA () -
CLP (Cell Lass Priority) – приоритет потери ячейки
CS (Convergence Subfuntion) – совмещение потоков данных
CTS (Clear-to-Send) -
DVA (Distance Vector Algorithms) – дистанционно-векторные алгоритмы
FDMA () -
GFC (Generic Flow Control) – поле общего управления потоком
HEC (Header Error Control) – контроль ошибок в заголовке
LSA (Link State Algorithms) – алгоритмы состояния связей
MACA () -
MACAW () -
PT (Payload Type) – тип полезной нагрузки
RIP (Routing Internet Protocol) – протокол межсетевой маршрутизации
RTS (Request-to-Send) – запрос на сообщение
SAR (Segmentation and Reassemble) – сегментация или сборка сегментов данных
TDMA () -
VCI (Virtual Cannel Identifier) – идентификатор виртуального канала
VPI (Virtual Path Identifier) – идентификатор виртуального пути
Список сокращений на русском языке
АП – абонентский пункт
БЗУ – быстрое запоминающее устройство
БКП – быстрая коммутация пакетов
ВК – виртуальный канал
ВТ – виртуальный тракт
ГА – гидроакустика
ГЛС – гидролокационная система
ДЧМ – дискретно-частотная модуляция
ИВП – идентификатор виртуального пути
ИЛС – исходящая линия связи
КОЗ – контроль ошибок в заголовке
ЛС – линия связи
НКГ – некогерентный прием
ОУП – общее управление потоком
ППЯ – приоритет потери ячейки
ПРИ – план распределения информации
ПСП – псевдослучайная последовательность
ТК – точка коммутации
ТМ – таблицы маршрутизации
ТПН – тип полезной нагрузки
УИ – узел-источник
УК – узел коммутации
УП – узел-получатель
У-ЦСИО – узкополосная цифровая сеть интегрального обслуживания
Ш-ЦСИО – широкополосная цифровая сеть интегрального обслуживания
ЭВМ – электронно-вычислительная машина
ЭЛТ – электронно-лучевая трубка
Список используемой литературы
1. Бурлак Г.Н. Безопасность работы на компьютере: Организация труда на предприятиях информационного обслуживания. - М.: Финансы и статистика, 1998. – 144с.
2. Иванов И.А. Динамическое управление потоками // Электросвязь. – 1998. №11. – с.21.
3. Клюкин И.И. Звук и море. – Ленинград: “Наука”, 1984. – 247c.
4. Компьютер и здоровье. Гигиенические требования. – М.: изд-во “Cоциальная защита”, 1999. – 176с.
5. Крук Б.И., Попантонопуло В.И., Шувалов В.П . Телекоммуникационные сети и системы. Новосибирск: Наука, 1998. – 536с.
6. Лазарев В.Г. Инетллекуальные цифровые сети: Справочник. – М.:Финансы и статистика, 1996. – 224с.
7. Лазуткин Б.А. Статистические методы обработки гидроакустических сигналов. – Ленинград: “Наука”, 1983. – 438с.
8. Назаров А.Н., Симонов М.В. АТМ технология высокоскоростных сетей. – М.: Эко-Трендз, 1999. – 252с.
9. Новиков С.Н. Методы маршрутизации на цифровых широкополосных сетях связи: Ч.1 / Учебное пособие. – Новосибирск: 2000. – 84с.: ил.
10. Олифер В.Г., Олифер Н.А. / Компьютерные сети. Принципы, технологии, протоколы. – Санкт-Петербург: Питер, 2001. – 672с.: ил.
11. Шушлебин И.Ф. Организация безопасности при работе на персональных компьютерах. – Новосибирск: СибГАТИ, 1997. – 108с.
12. Proakis J.G., Rice J.A., Sozer E.M., Stojanovic M. Shallow Water Acoustic Networks // IEEE Communications Magazine. – 2001. Nowember.
Похожие рефераты:
Локальные сети на основе коммутаторов
Курс лекции по компьютерным сетям
Разработка системы маршрутизации в глобальных сетях(протокол RIP для IP)
Коммутация в сетях с использованием асинхронного метода переноса и доставки
Коммутатор цифровых каналов системы передачи
Постановка, настройка и исследование абонентского программного обеспечения сети Internet
Проектирование и разработка сетевых броузеров на основе теоретико-графовых моделей
Протоколы маршрутизации RIP и OSPF
Анализ систем безопасности, использующих GSM каналы связи
Дистанционные технологии в образовании
Реорганизация схемы управления и оптимизация сегмента сети передачи данных