| Скачать .docx |
Курсовая работа: Теоретические основы построения модуляторов и демодуляторов
Содержание
Введение
1. Теоретические основы построения модуляторов и демодуляторов
2. Микроэлектронные формирователи и преобразователи измерительных
сигналов
2.1. Формирование синусоидальных высокочастотных сигналов с
повышенной стабильностью амплитуды и линейностью характеристики
управления по частоте
2.2. Теоретические основы управляемых автогенераторов
3. Прецизионный амплитудный модулятор
4. Линейный частотный модулятор
5. Цифровой частотно-фазовый демодулятор
Заключение
Список использованной литературы
Введение
В основе проектирования (интегрализации) радиоприемных устройств (РПУ) на ИС лежат общие принципы проектирования микроэлектронной аппаратуры, которые приобретают некоторые особенности, связанные со спецификой приемной аппаратуры.
Отличительными чертами РПУ являются:
аналоговый характер сигнала, его большой динамический диапазон (доли микровольт – единицы вольт);
широкий частотный диапазон (от постоянного тока – на выходе детектора, до сотен мегагерц или десятков гигагерц – на выходе);
большое число нерегулярных соединений;
функциональное разнообразие узлов (блоков) при их относительно небольшом общем числе.
К функциональным блокам (каскадам) предъявляются разнообразные требования, часто зависящие от типа сигналов. В некоторых узлах должна быть обеспечена прецизионность изготовления. Часто оказывается необходимым изменять параметры элементов в процессе регулировки аппаратуры, что нежелательно при микроэлектронном исполнении.
На цифровых ИС можно реализовать практически любой алгоритм обработки сигнала, осуществляемый в приемно-усилительных устройствах, включая элементы оптимального радиоприема.
Преимущества цифровой обработки: неограниченно долго можно хранить информацию, отсутствие ошибок, параметрических уходов при функционировании, легкая возможность адаптации (изменение параметров устройств под влиянием принимаемого сигнала или по команде), высокая технологичность в производстве, большие перспективы дальнейшей микроминиатюризации.
1. Теоретические основы построения модуляторов и демодуляторов
Аналоговый перемножитель сигнала (ПС) является универсальным базовым блоком, выполняющим ряд математических функций: умножение, деление, возведение в квадрат. В ряде случаев функциональные возможности ПС реализуются совместно с ОУ.
ПС может применяться в качестве модулятора. Рассмотрим основные принципы построения модуляторов и демодуляторов.
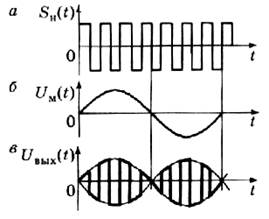
Балансный модулятор может иметь высокую линейность лишь по одному (модуляционному) входу. Второй вход (вход несущей) может запитываться переменным напряжением с постоянной амплитудой, причем уровень несущей может быть достаточно большим и вырождаться в функцию коммутации SН (t) (рис. 1,а).
Физически Это означает, что активные элементы модулятора при высоком уровне входного сигнала превращаются в синхронные ключи, при этом модулирующий сигнал UM (t) (рис. 1,б) эффективно коммутируется с частотой несущей SН (t), образуя выходной сигнал в виде (рис. 1,в)
 |
где К – коэффициент пропорциональности.
Рис. 1. Диаграммы, поясняющие работу БМ при воздействии функции коммутации
Таким образом, при использовании БМ в режиме сильных сигналов один из сигналов (несущая) представляет собой симметричную прямоугольную волну единичной амплитуды SН
(t) (рис. 1, а) первая гармоника которой ![]() является полезной, а другие – нежелательны.
является полезной, а другие – нежелательны.
Используя разложение Фурье, несущую SН
(t) можно представить в виде суммы членов бесконечного гармонического ряда с частотами кратными ![]()
![]() ,
,
где коэффициенты Фурье вычисляются по формуле
![]() .
.
Для подавления гармонических составляющих ФНЧ с частотой среза немного выше ![]() (рис. 2). В этом случае для первой гармоники выходного напряжения (1) можно записать
(рис. 2). В этом случае для первой гармоники выходного напряжения (1) можно записать
![]() , (2)
, (2)
где К – коэффициент, учитывающий произведение масштабных коэффициентов передачи ПС и ФНЧ на частоте первой гармонической; UН – напряжение колебания ограниченной несущей.
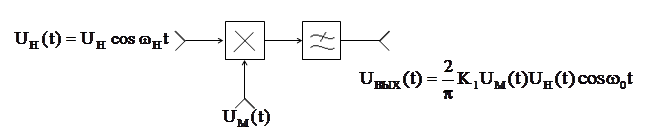 |
Рис. 2. Схема БМ
Если на модулирующий вход подать сигнал с постоянной составляющей
![]() , (3)
, (3)
где U0
– напряжение постоянной составляющей; UM
и ![]() - амплитуда и частота модулирующего напряжения; m=UM
/U0
, то на выходе ФНЧ БМ в соответствием с выражением (2) будет получен АМ сигнал
- амплитуда и частота модулирующего напряжения; m=UM
/U0
, то на выходе ФНЧ БМ в соответствием с выражением (2) будет получен АМ сигнал
 , (4)
, (4)
где ![]() - уровень несущей АМ сигнала.
- уровень несущей АМ сигнала.
При использовании БМ в режиме фазового детектирования (рис. 3) на входы ПС подают напряжения одной и той же частоты, но со сдвигом фаз на угол ![]() . Пусть один из сигналов будет
. Пусть один из сигналов будет ![]() , а второй
, а второй ![]() , тогда на выходе БМ получим
, тогда на выходе БМ получим
![]() . (5)
. (5)
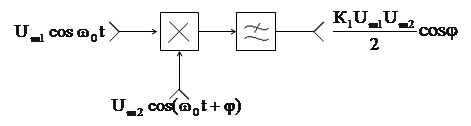 |
Рис. 3. Фазовый демодулятор
Если с помощью ФНЧ отфильтровать составляющую с удвоенной частотой, то на выходе ФД получим постоянное напряжение, пропорциональное косинусу угла ![]()
![]() . (6)
. (6)
В случае необходимости с помощью полосового фильтра, как следует из выражения (5), можно получить удвоение частоты.
Возможность определения с помощью БМ фазового сдвига между напряжениями может быть использована для построения частотных демодуляторов ЧМ сигнала. Структурная схема частотного демодулятора (рис.4) включает широкополосный ограничитель 1, устраняющий возможное изменение амплитуды ЧМ сигнала и формирующий высокий уровень сигнала коммутации S1 (t), полосовой фазосдвигающий фильтр 2, настроенный на частоту несущей (среднюю частоту) ЧМ сигнала, а также БМ 3 и ФНЧ 4.
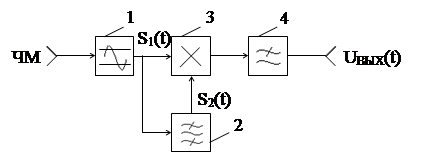 |
Рис. 4. Частотный демодулятор
Полосовой фильтр (рис. 5) формирует второй сигнал S2
(t), управляющий БМ. При высокой добротности фильтра фазовый сдвиг ![]() , вызываемый девиацией частоты
, вызываемый девиацией частоты ![]() вблизи несущей
вблизи несущей ![]() , может быть записан в следующем виде
, может быть записан в следующем виде
 ,
,
|
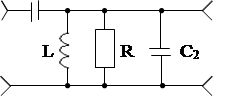 |
Рис. 5. Фазосдвигающий фильтр
Отфильтрованный ФНЧ сигнал оказывается пропорциональным девиации частоты входного сигнала
 ,
,
где К – коэффициент преобразования частотного демодулятора; UЧМ – входное напряжение ЧМ сигнала.
Реализация ПС в виде амплитудного модулятора на основе операционных усилителей и изменении проводимости полевого транзистора показана на рис.6. Здесь в качестве управляемого параметра используется проводимость канала ПТ, характеристика которой в режиме управляемого сопротивления аппроксимируется выражением
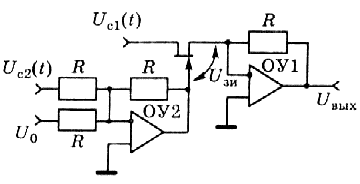 |
Рис. 6. Амплитудный модулятор на основе ПТ и ОУ
Пусть на один вход (в цепь стока ПТ) подается относительно высокочастотный (несущий) сигнал UC 1 (t), а на второй вход (в цепь затвора ПТ) посредством инвертирующего сумматора на ОУ2 с единичным коэффициентом передачи – низкочастотный (модулирующий) UC 2 (t) и постоянная составляющая напряжения U0
![]() ; (8)
; (8)
![]() ; (9)
; (9)
![]() , (10)
, (10)
где Um
1
, Um
2
и ![]() ,
, ![]() - амплитуды и частоты соответственно несущего и модулирующего сигналов.
- амплитуды и частоты соответственно несущего и модулирующего сигналов.
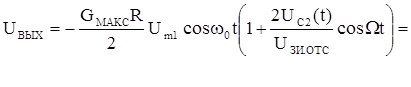
Принимая во внимание (7)…(10) и учитывая, что между затвором и истоком ПТ действует напряжение ![]() , для выходного напряжения амплитудного модулятора в соответствии с формулой
, для выходного напряжения амплитудного модулятора в соответствии с формулой ![]() можно записать
можно записать
 (11)
(11)
или
 (12)
(12)
![]() ,
,
где Um 0 и m – амплитуда несущей и глубина модуляции получаемого АМ колебания;
![]() , (13)
, (13)
 . (14)
. (14)
Для исследования спектрального состава АМ колебаний формулу (12) целесообразно заменить выражением (4), содержащим всего лищь три составляющих. Реально спектр (рис. 7) АМ сигнала модулятора помимо трех основных частот (4) содержит ряд других составляющих, отстоящих от несущей на величину, кратную частоте ![]() модулирующего сигнала, что связано в основном с нелинейностью характеристики (7) ПТ.
модулирующего сигнала, что связано в основном с нелинейностью характеристики (7) ПТ.
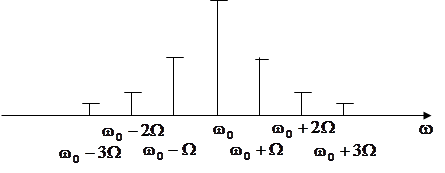 |
Рис. 7. Спектр выходного сигнала амплитудного модулятора
2. Микроэлектронные формирователи и преобразователи
измерительных сигналов
2.1 Формирование синусоидальных высокочастотных сигналов с
повышенной стабильностью амплитуды и линейностью характеристики управления по частоте
Наиболее распространенным методом формирования синусоидальных сигналов на повышенных частотах является метод, основанный на компенсации активных потерь в резонансном LC-контуре отрицательным сопротивлением, реализуемым с помощью, например, линейных усилителей с ПОС, КОС, электронных приборов с падающей вольтамперной характеристикой и т.д. На относительно низких частотах предпочтение отдается RC-генераторам, например, на основе моста Вина, так как на этих частотах для LC-генераторов требуются большие номиналы индуктивностей и емкостей, что для МЭУ нежелательно.
Получаемые таким или другим способом колебания оказываются недостаточно стабильными по амплитуде и по частоте, в особенности при их управлении. При этом характеристики управления, как правило, являются нелинейными, что определяет целесообразность их линеаризации и стабилизации.
Основополагающим методом решения данной проблемы является разработанный нами метод линеаризации и термостабилизации характеристик нелинейных элементов [4,7], изложенный в работах [1,2].
Применительно к управлению формируемых колебаний данный метод отличается лишь реализацией образцового преобразователя “параметр - напряжение”, который в данном случае должен быть преобразователем частоты в напряжение (ПЧН) при линеаризации характеристики управления по частоте и широкополосным амплитудным демодулятором (АД) (выпрямителем) при стабилизации амплитуды колебаний.
 |
В соответствии с изложенным структурная схема управляемого автогенератора (рис.8) содержит собственно автогенератор 1, подсистему стабилизации амплитуды, включающую широкополосный АД 2, ИОН 3, сумматор 4 и сравнивающее устройство 5, а также подсистему линеаризации характеристики управления по частоте, включающую ПЧН 6, источник 7 управляющего напряжения, сумматор 8 и сравнивающее устройство 9. При необходимости управляемый автогенератор может быть дополнен генератором 10 модулирующего сигнала, с помощью которого посредством переключателя 11 может быть осуществлена амплитудная модуляция (АМ) (нижнее положение) или частотная модуляция (ЧМ) (верхнее положение) формируемого сигнала.
Рис. 8. Структурная схема управляемого по частоте и амплитуде
автогенератора
Принцип действия подсистем регулирования основан на сравнении преобразуемых сигналов, пропорциональных амплитуде и частоте, с опорными напряжениями ![]() и
и ![]() источников 3 и 7 соответственно с образованием разностных сигналов, которые после усиления в сравнивающих устройствах 5 и 9 изменяют состояние автогенератора 1 так, что его амплитуда и частота остаются неизменными. При изменении управляющего напряжения
источников 3 и 7 соответственно с образованием разностных сигналов, которые после усиления в сравнивающих устройствах 5 и 9 изменяют состояние автогенератора 1 так, что его амплитуда и частота остаются неизменными. При изменении управляющего напряжения ![]() в контуре регулирования частоты и опорного напряжения
в контуре регулирования частоты и опорного напряжения ![]() в контуре регулирования амплитуды соответствующим образом подстраиваются амплитуда и частота колебаний автогенератора. Одновременно возможно получение ЧМ и АМ колебаний, если к установленным напряжениям
в контуре регулирования амплитуды соответствующим образом подстраиваются амплитуда и частота колебаний автогенератора. Одновременно возможно получение ЧМ и АМ колебаний, если к установленным напряжениям ![]() и
и ![]() добавить с помощью переключателя 11 и сумматоров 4 и 8 соответствующий уровень модулирующего напряжения
добавить с помощью переключателя 11 и сумматоров 4 и 8 соответствующий уровень модулирующего напряжения ![]() от генератора 10.
от генератора 10.
В связи с тем что амплитуда регулирующих сигналов МЭУ, как правило, не превышает ![]() 10 В, в качестве сравнивающих устройств 5 и 9 подходят стандартные ОУ без обратной связи или с ООС определенного вида для улучшения динамических свойств регулирования с возможно большим коэффициентом передачи
10 В, в качестве сравнивающих устройств 5 и 9 подходят стандартные ОУ без обратной связи или с ООС определенного вида для улучшения динамических свойств регулирования с возможно большим коэффициентом передачи ![]() на постоянном токе, так как ошибка в стабилизации соответствующих параметров тем ниже, чем выше этот коэффициент [2].
на постоянном токе, так как ошибка в стабилизации соответствующих параметров тем ниже, чем выше этот коэффициент [2].
2.2. Теоретические основы управляемых автогенераторов
Эквивалентная схема замещения автогенератора (рис. 9) включает колебательный контур, представленный в виде двух противоположных по знаку реактивных сопротивлений ![]() с волновым сопротивлением
с волновым сопротивлением
![]() , (15)
, (15)
эквивалентную активную составляющую проводимости
![]() , (16)
, (16)
широкополосный усилитель с комплексным коэффициентом передачи ![]() и управляемую полную проводимость
и управляемую полную проводимость ![]() . При этом реактивные составляющие входного сопротивления усилителя и монтажа схемы скомпенсированы на рабочей (резонансной) частоте
. При этом реактивные составляющие входного сопротивления усилителя и монтажа схемы скомпенсированы на рабочей (резонансной) частоте ![]() соответствующими реактивностями колебательного контура. Знак “-” перед реактивным сопротивлением соответствует емкости C, а знак “+” – индуктивности L колебательного контура. Активные составляющие колебательного контура
соответствующими реактивностями колебательного контура. Знак “-” перед реактивным сопротивлением соответствует емкости C, а знак “+” – индуктивности L колебательного контура. Активные составляющие колебательного контура ![]() и входа усилителя
и входа усилителя ![]() представлены в параллельной схеме замещения. Выходная проводимость усилителя удовлетворяет условию
представлены в параллельной схеме замещения. Выходная проводимость усилителя удовлетворяет условию
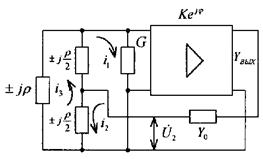 |
Рис. 9. Эквивалентная схема замещения управляемого генератора
При полной компенсации активных составляющих возникает генерация сигнала и, следовательно, выполняется баланс активных мощностей в колебательном контуре [8]:
 , (18)
, (18)
где ![]() ,
, ![]() и
и ![]() - модули токов и напряжения, соответствующие комплексным
- модули токов и напряжения, соответствующие комплексным ![]() ,
, ![]() и
и ![]() , представленным на рис. 9;
, представленным на рис. 9; ![]() - угол сдвига фаз между током
- угол сдвига фаз между током ![]() и напряжением
и напряжением ![]() в цепи ПОС.
в цепи ПОС.
Система уравнений, описывающая схему, представленную на (рис.9), и позволяющая определить величины, входящие в (18), имеет вид
![]()
 ,
,
 , (19)
, (19)
![]() .
.
Решая систему (19), получаем
 , (20)
, (20)
 . (21)
. (21)
Так как схема предназначена для компенсации только активной составляющей проводимости, целесообразно в качестве регулирующих использовать элементы с чисто активным, емкостным или индуктивным характером проводимости ![]() .
.
Рассмотрим возможность использования в качестве ![]() активной проводимости
активной проводимости ![]() , реализуемой на основе ПТ. При соблюдении условия (17)
, реализуемой на основе ПТ. При соблюдении условия (17)
![]() . (22)
. (22)
На основании (20)-(22) определяем величины, входящие в (18):
 , (23)
, (23)
 , (24)
, (24)
 , (25)
, (25)
где
 . (26)
. (26)
Подставляя (23)-(26) в (18) и учитывая (16), находим реализуемую отрицательную активную проводимость, компенсирующую проводимость колебательного контура
 . (27)
. (27)
При условиях ![]() и
и  , легко выполнимых на практике, выражение (27) упрощается
, легко выполнимых на практике, выражение (27) упрощается
![]() . (28)
. (28)
Погрешность, допускаемую при данных ограничениях, оценим на основании сравнения соотношений (27) и (28)
 . (29)
. (29)
Если предположить, что в рабочем диапазоне частот усилитель не будет иметь фазового сдвига (![]() ), то выражение (29) упрощается
), то выражение (29) упрощается
 . (30)
. (30)
При неограниченном уменьшении входной проводимости усилителя по сравнению с проводимостью колебательного контура (![]() ) погрешность (30) реализации отрицательной активной проводимости
) погрешность (30) реализации отрицательной активной проводимости
![]() (31)
(31)
и схема (см. рис.9) позволяет получить высокую линейность компенсации проводимостей резонансного контура в широком диапазоне изменения его активной составляющей, связанной как с перестройкой по частоте ![]() (15), так и с изменением основных параметров (L,C).
(15), так и с изменением основных параметров (L,C).
При использовании управляемой проводимости (8.260) в виде емкости (![]() ) реализуемая отрицательная активная составляющая проводимости по аналогии с (28)
) реализуемая отрицательная активная составляющая проводимости по аналогии с (28)
![]() . (32)
. (32)
Для реализации схемой (см. рис.9) отрицательной проводимости необходимо в (32) обеспечить ![]() .
.
Проведенный анализ для случая ![]() показал, что схема, представленная на рис. 9, ведет себя так же, как и при
показал, что схема, представленная на рис. 9, ведет себя так же, как и при ![]() (32). Однако при реализации этого варианта в интегральном исполнении имеются трудности, связанные с проблемой индуктивности в микроэлектронике [1].
(32). Однако при реализации этого варианта в интегральном исполнении имеются трудности, связанные с проблемой индуктивности в микроэлектронике [1].
3. Прецизионный амплитудный модулятор
Совмещение функций генерирования и модуляции по амплитуде или частоте колебаний в автогенераторе нецелесообразно, так как это приводит к неконтролируемому повышению нестабильности частоты, которую стремятся уменьшать всевозможными средствами, включая термостатирование автогенератора. В связи с этим данные операции разделяют, оставляя функцию генерирования колебаний в автогенераторе, а функцию модуляции колебаний осуществляют с помощью отдельных амплитудных или частотных модуляторов, что определяет необходимость совершенствования их схемотехники.
Построение амплитудных модуляторов, работающих на относительно низких и средних частотах c использованием ПТ и ОУ, а также перемножителей сигналов, рассмотрено в работах [1,3].
Широкополосный амплитудный модулятор, способный работать на высоких (сотни мегагерц) частотах, может быть реализован на основе схемы ШУН (рис. 10) с симметричным выходом и управлением высокочастотного (несущего) сигнала ![]() путем изменения тока
путем изменения тока ![]() ГСТ под влиянием низкочастотного (модулирующего) сигнала
ГСТ под влиянием низкочастотного (модулирующего) сигнала ![]() , так как коэффициент передачи ДУ линейно связан с величиной этого тока.
, так как коэффициент передачи ДУ линейно связан с величиной этого тока.
Для изменяющегося во времени тока ГСТ ![]() амплитудного модулятора, представленного на рис.10, в котором модулирующий сигнал
амплитудного модулятора, представленного на рис.10, в котором модулирующий сигнал ![]() подается в его токозадающую цепь через повторитель сигнала на ОУ1, можно записать:
подается в его токозадающую цепь через повторитель сигнала на ОУ1, можно записать:
 , (33)
, (33)
где ![]() ,
, ![]() и
и ![]() - напряжение питания отрицательной полярности, напряжение база-эмиттер БТ Т3 и постоянная составляющая тока ГСТ
- напряжение питания отрицательной полярности, напряжение база-эмиттер БТ Т3 и постоянная составляющая тока ГСТ
 . (34)
. (34)
Выходное симметричное напряжение модулятора с учетом (33)

 , (35)
, (35)
где ![]() - изменяющаяся во времени t крутизна БТ дифференциальной пары Т1, Т2.
- изменяющаяся во времени t крутизна БТ дифференциальной пары Т1, Т2.
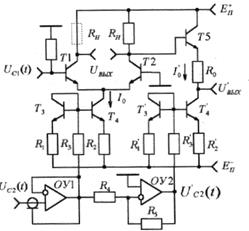 |
Рис. 10. Прецизионный амплитудный модулятор
При входных синусоидальных сигналах
![]() , (36)
, (36)
![]() , (37)
, (37)
где ![]() ,
, ![]() и
и ![]() ,
, ![]() - амплитуды и частоты соответственно несущего и модулирующего сигналов,
- амплитуды и частоты соответственно несущего и модулирующего сигналов,
выходное напряжение (35) модулятора приобретает вид амплитудно-модулированного колебания

![]() , (38)
, (38)
где ![]() и m – амплитуда несущей и глубина модуляции с учетом (34) сигнала с АМ,
и m – амплитуда несущей и глубина модуляции с учетом (34) сигнала с АМ,
 , (39)
, (39)
 . (40)
. (40)
Как следует из формулы (39), коэффициент передачи по несущей
 (41)
(41)
соответствует коэффициенту передачи ДУ, амплитуда неискаженного выходного сигнала которого не может превышать удвоенного значения падения напряжения на резисторе нагрузки ![]() в режиме покоя. Следовательно, максимальный уровень несущей на симметричном выходе модулятора должен удовлетворять условию
в режиме покоя. Следовательно, максимальный уровень несущей на симметричном выходе модулятора должен удовлетворять условию
![]() , (42)
, (42)
при этом уровень входного сигнала (36) может быть не выше удвоенного температурного потенциала
![]() . (43)
. (43)
Амплитуда модулирующего сигнала (37) при непревышении стопроцентной глубины модуляции (![]() ), как видно из формулы (40), должна быть на напряжение база-эмиттер третьего транзистора меньше напряжения источника питания отрицательной полярности
), как видно из формулы (40), должна быть на напряжение база-эмиттер третьего транзистора меньше напряжения источника питания отрицательной полярности
![]() . (44)
. (44)
Амплитуду сигнала (44) можно получить на выходе повторителя сигнала (рис.10) при тех же питающих напряжениях ОУ1, что и модулятора в целом. Если требуемый ток ![]() превышает допустимый выходной ток используемого ОУ1, то целесообразно в токозадающей цепи ГСТ ток уменьшить, выбрав номиналы резисторов
превышает допустимый выходной ток используемого ОУ1, то целесообразно в токозадающей цепи ГСТ ток уменьшить, выбрав номиналы резисторов ![]() и
и ![]() из соотношения
из соотношения ![]() , и рассчитать номинал резистора
, и рассчитать номинал резистора ![]() , исходя из формулы (34),
, исходя из формулы (34),
 . (45)
. (45)
Сопротивление нагрузки модулятора следует выбирать исходя из частоты среза ![]() , а не
, а не ![]() , как в широкополосном демодуляторе, с учетом коэффициента сужения полосы пропускания за счет емкостей, шунтирующих нагрузочное сопротивление
, как в широкополосном демодуляторе, с учетом коэффициента сужения полосы пропускания за счет емкостей, шунтирующих нагрузочное сопротивление ![]() . Это связано с тем, что в модуляторе использовать сопротивление в цепи эмиттеров транзисторов дифференциальной пары Т1 и Т2 не рекомендуется, так как при этом возникают нелинейные искажения огибающей.
. Это связано с тем, что в модуляторе использовать сопротивление в цепи эмиттеров транзисторов дифференциальной пары Т1 и Т2 не рекомендуется, так как при этом возникают нелинейные искажения огибающей.
Действительно, при введении резисторов ![]() в цепь эмиттеров БТ Т1 и Т2 крутизна при условии
в цепь эмиттеров БТ Т1 и Т2 крутизна при условии ![]() становится независимой от тока
становится независимой от тока ![]() :
:
 , (46)
, (46)
а производная от (46)
является обратной функцией квадрата модулирующего тока ![]() (33), т.е. нелинейной функцией для сигнала модуляции (37).
(33), т.е. нелинейной функцией для сигнала модуляции (37).
Снимать непосредственно сигналы с несимметричных выходов модулятора нельзя, так как на каждом из этих выходов присутствует синфазный сигнал, образуемый при изменении тока ГСТ на каждом из сопротивлений нагрузки  , который, накладываясь на дифференциальный сигнал, искажает закон модуляции. При съеме полезного сигнала с симметричного выхода сигналы
, который, накладываясь на дифференциальный сигнал, искажает закон модуляции. При съеме полезного сигнала с симметричного выхода сигналы ![]() , вычитаясь между собой, не проявляются и, следовательно, не нарушают закона модуляции.
, вычитаясь между собой, не проявляются и, следовательно, не нарушают закона модуляции.
Для получения возможности съема полезного сигнала с одного выхода (лучше со второго, так как БТ Т2 включен по схеме с ОБ, при этом сопротивление нагрузки в Т1 должно быть закорочено с целью получения включения с ОК) относительно общей точки необходим специальный каскад сдвига уровня, который позволил бы, исключив влияние синфазного сигнала, восстановить прежний закон модуляции и сформировать несущую без постоянной составляющей. В связи с этим основная схема модулятора (рис. 10) дополнена каскадом сдвига уровня на БТ Т5 с управляемым ГСТ на транзисторах ![]() ,
, ![]() и ОУ2.
и ОУ2.
Условие компенсации постоянной составляющей, включая синфазную, на выходе модулятора ![]() сводится к условию
сводится к условию
![]() 0, (47)
0, (47)
где ![]() и
и ![]() - напряжение база-эмиттер БТ Т5 и ток дополнительного ГСТ, который по форме записи соответствует (33), так как схема данного ГСТ идентична схеме основного ГСТ (рис. 10).
- напряжение база-эмиттер БТ Т5 и ток дополнительного ГСТ, который по форме записи соответствует (33), так как схема данного ГСТ идентична схеме основного ГСТ (рис. 10).
С учетом отмеченного и формулы (33) условие (47) приобретает вид
 0, (48)
0, (48)
где ![]() ,
, ![]() и
и ![]() - постоянная состовляющая тока, требуемое переменное напряжение компенсации и напряжение база-эмиттер БТ
- постоянная состовляющая тока, требуемое переменное напряжение компенсации и напряжение база-эмиттер БТ ![]() дополнительного ГСТ;
дополнительного ГСТ;![]() - сопротивление компенсирующего резистора.
- сопротивление компенсирующего резистора.
Условие компенсации (48) в статическом режиме (при отсутствии модуляции ![]() 0)
0)
![]() 0
0
позволяет определить требуемый номинал компенсирующего резистора
 . (49)
. (49)
Условие компенсации (48) в динамическом режиме (при наличии модуляции)
![]()
 0
0
позволяет определить требуемый уровень переменного напряжения компенсации
 . (50)
. (50)
Для упрощения практической реализации модулятора необходимо соблюдать равенство напряжений ![]() и
и ![]() , которое выполнимо при одинаковых токах транзисторов
, которое выполнимо при одинаковых токах транзисторов ![]() и Т3. Тогда целесообразно принять одинаковыми и токи
и Т3. Тогда целесообразно принять одинаковыми и токи ![]() и
и ![]() , т. е. необходимо иметь два ГСТ с идентичными параметрами, что осуществимо в едином интегральном технологическом цикле.
, т. е. необходимо иметь два ГСТ с идентичными параметрами, что осуществимо в едином интегральном технологическом цикле.
При идентичных параметрах ГСТ ![]() ,
, ![]() ,
, ![]() и
и ![]() соотношения (49) и (50) упрощаются
соотношения (49) и (50) упрощаются
 , (51)
, (51)
 . (52)
. (52)
Уравнение (52) позволяет синтезировать управляющее дополнительным ГСТ устройство, которое должно быть инвертирующим устройством на ОУ2 c коэффициентом передачи
 . (53)
. (53)
Номиналы резисторов цепи ООС ![]() и
и ![]() при низкоомных резисторах
при низкоомных резисторах ![]() и
и ![]() могут быть пропорционально увеличены, чтобы заметно не нагружать ОУ1 и ОУ2, с сохранением соотношения (53).
могут быть пропорционально увеличены, чтобы заметно не нагружать ОУ1 и ОУ2, с сохранением соотношения (53).
Коэффициент передачи каскада сдвига уровня на транзисторе Т5
 , (54)
, (54)
где ![]() - внутреннее сопротивление второго (компенсирующего) ГСТ
- внутреннее сопротивление второго (компенсирующего) ГСТ
 ; (55)
; (55)
 и
и ![]() - параллельное соединение резисторов
- параллельное соединение резисторов ![]() и
и ![]() и коэффициент передачи тока БТ
и коэффициент передачи тока БТ ![]() .
.
Результирующий коэффициент передачи по несущей амплитудного модулятора (41) и (54)
 . (56)
. (56)
Входные сопротивления по входу несущей модулятора без учета сопротивления в цепи базы транзистора Т1, которое при подключенном источнике сигнала ![]() может отсутствовать, относительно невелико. Оно такое, как у простого ДУ:
может отсутствовать, относительно невелико. Оно такое, как у простого ДУ:
 , (57)
, (57)
где ![]() - коэффициент передачи тока БТ Т1, Т2, что требует применения источника сигнала
- коэффициент передачи тока БТ Т1, Т2, что требует применения источника сигнала ![]() с малым внутренним сопротивлением.
с малым внутренним сопротивлением.
Входное сопротивление модулятора по модуляционному входу исключительно велико, оно определяется входным дифференциальным сопротивлением ![]() и коэффициентом передачи
и коэффициентом передачи ![]() используемого ОУ1
используемого ОУ1
![]() . (58)
. (58)
В связи с этим модуляционный вход модулятора целесообразно экранировать, соединив оплетку кабеля с выходом ОУ1, как показано на рис.10.
Выходное сопротивление модулятора
 (59)
(59)
относительно велико, и это определяет необходимость использования высокоомной нагрузки.
Так как транзисторы дифференциальной пары Т1 и Т2 включены по схеме ОК-ОБ и нагрузкой ее является БТ Т5, включенный по схеме ОК, то в формировании частоты среза ![]() модулятора участвует частота среза по параметру крутизны
модулятора участвует частота среза по параметру крутизны ![]() транзистора Т2 и частота среза ФНЧ нагрузки
транзистора Т2 и частота среза ФНЧ нагрузки ![]() , которые принимаются равными (
, которые принимаются равными (![]()
![]()
![]() ). С учетом коэффициента сужения полосы пропускания
). С учетом коэффициента сужения полосы пропускания ![]() , в данном случае n=2 и
, в данном случае n=2 и ![]() , сопротивление нагрузки
, сопротивление нагрузки
 , (60)
, (60)
где ![]() - выходная емкость ФНЧ нагрузки, состоящая из емкостей коллектор- база
- выходная емкость ФНЧ нагрузки, состоящая из емкостей коллектор- база ![]() транзисторов Т2 и Т5 и монтажной емкости
транзисторов Т2 и Т5 и монтажной емкости ![]() ;
;
![]() . (61)
. (61)
В связи с этим требуемая частота единичного усиления транзисторов Т1 и Т2
![]() . (62)
. (62)
Расчет амплитудного модулятора следует начинать с определения сопротивления нагрузки (60) и задания требований к транзисторам дифференциальной пары Т1, Т2 и режима их работы с целью обеспечения заданного частотного диапазона. При емкостях ![]() 2 пФ и емкости монтажа
2 пФ и емкости монтажа ![]() 1 пФ емкость (61)
1 пФ емкость (61) ![]() 5 пФ и для частоты среза модулятора
5 пФ и для частоты среза модулятора ![]() 200 МГц сопротивление нагрузки (50) составит
200 МГц сопротивление нагрузки (50) составит ![]() 100 Ом, а требуемая частота единичного усиления (62) транзисторов Т1, Т2 при
100 Ом, а требуемая частота единичного усиления (62) транзисторов Т1, Т2 при ![]() 5 Ом и
5 Ом и ![]() 10 мА должна быть
10 мА должна быть ![]() 300 МГц.
300 МГц.
Желательно чтобы остальные транзисторы схемы модулятора были однотипными с Т1 и Т2, но они работают с цепями ООС, и их частоты единичного усиления могут быть несколько меньшими, несмотря на удвоенное значение их рабочего тока.
Так как к модулятору, как правило, не предъявляется высоких требований в части коэффициента усиления несущей (56), то даже при такой низкоомной нагрузке ток ГСТ (34) может быть выбран не очень большой величины (![]() 20 мА), чтобы использовать стандартные ОУ1 и ОУ2, например,
20 мА), чтобы использовать стандартные ОУ1 и ОУ2, например, ![]() 10 мА.
10 мА.
После этого расчет производят в соответствии с формулами, описывающими работу модулятора, включая оценку входных и выходных его параметров (57) - (59), выбор соответствующего ОУ и определение номиналов резисторов ![]() ,
,![]() (53) ОУ2, c учетом того что верхняя частота модулирующего сигнала (37), как правило, не превышает верхней частоты звукового диапазона
(53) ОУ2, c учетом того что верхняя частота модулирующего сигнала (37), как правило, не превышает верхней частоты звукового диапазона ![]() 20 кГц.
20 кГц.
При первичной отладке амплитудного модулятора необходимо в отсутствие входных сигналов (36) и (37) как можно точнее получить нулевой уровень постоянной составляющей выходного напряжения ![]() путем более точной, например лазерной, подгонки номинала компенсирующего резистора
путем более точной, например лазерной, подгонки номинала компенсирующего резистора ![]() (рис. 10). Затем, установив уровень модулирующего сигнала
(рис. 10). Затем, установив уровень модулирующего сигнала ![]() , соответствующий предельной глубине модуляции (
, соответствующий предельной глубине модуляции (![]() 1) (40), путем подстройки номинала резистора
1) (40), путем подстройки номинала резистора ![]() следует зафиксировать отсутствие данного сигнала на выходе модулятора. После этого при калиброванных входных сигналах
следует зафиксировать отсутствие данного сигнала на выходе модулятора. После этого при калиброванных входных сигналах ![]() и
и ![]() модулятор может быть использован как прецизионное средство получения сигналов с АМ в широком диапазоне частот.
модулятор может быть использован как прецизионное средство получения сигналов с АМ в широком диапазоне частот.
4. Линейный частотный модулятор
ЧМ, так же как и АМ, может быть осуществлена в отдельном от автогенератора модуляторе. Это актуально для ряда радиотехнических систем, в том числе и измерительных [9], требующих двух синхронизированных сигналов, один из которых представляет собой немодулированное колебание, а другой – колебание с ЧМ или АМ.
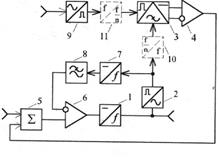 |
 Линейный частотный модулятор (рис.11), реализованный на основе фазовой автоподстройки частоты (ФАПЧ) [1], удовлетворяет таким требованиям. В состав системы ФАПЧ входят управляемый по частоте генератор 1, ФИ 2, цифровой частотно-фазовый демодулятор (ЦЧФД) 3, ДУ 4, сумматор 5 и сравнивающее устройство 6. Для осуществления линеаризации характеристики управления по частоте генератора введены
Линейный частотный модулятор (рис.11), реализованный на основе фазовой автоподстройки частоты (ФАПЧ) [1], удовлетворяет таким требованиям. В состав системы ФАПЧ входят управляемый по частоте генератор 1, ФИ 2, цифровой частотно-фазовый демодулятор (ЦЧФД) 3, ДУ 4, сумматор 5 и сравнивающее устройство 6. Для осуществления линеаризации характеристики управления по частоте генератора введены
|
ПЧН 7 и ФНЧ 8.
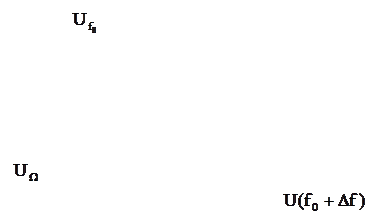
К второму входу ЦЧФД посредством ФИ 9 подводится сигнал от внешнего высокочастотного генератора несущей частоты с напряжением ![]() . На второй вход сумматора подается модулирующий сигнал от внешнего низкочастотного генератора с напряжением
. На второй вход сумматора подается модулирующий сигнал от внешнего низкочастотного генератора с напряжением ![]() . В связи с тем, что частотный диапазон работы ЦЧФД ограничен, но имеется необходимость получения сигналов с рабочей частотой, превышающей предельную частоту функционирования ЦЧФД, в состав линейного частотного модулятора могут быть введены делители частоты 10, 11.
. В связи с тем, что частотный диапазон работы ЦЧФД ограничен, но имеется необходимость получения сигналов с рабочей частотой, превышающей предельную частоту функционирования ЦЧФД, в состав линейного частотного модулятора могут быть введены делители частоты 10, 11.
При отсутствии одного из делителей 10 или 11 частота ![]() напряжения на выходе управляемого генератора может быть ниже или выше частоты несущей
напряжения на выходе управляемого генератора может быть ниже или выше частоты несущей ![]() внешнего генератора:
внешнего генератора:
![]() , (63)
, (63)
где ![]() и
и ![]() ,
, ![]() - девиация частоты генератора 1 и коэффициенты деления делителей частоты 10, 11 соответственно.
- девиация частоты генератора 1 и коэффициенты деления делителей частоты 10, 11 соответственно.
Для исключения влияния ЧМ на работу систем регулирования частоты среза ![]() ФНЧ в ЦЧФД и ФНЧ должны быть существенно ниже частоты
ФНЧ в ЦЧФД и ФНЧ должны быть существенно ниже частоты ![]() (
(![]() ).
).
Линейность ЧМ в рассматриваемом модуляторе определяется линейностью характеристики ПЧН, входящего в состав системы линеаризации характеристики управления генератора, действующей по принципу, изложенному в подразд. 2.1, т.е. при определенном коэффициенте передачи сравнивающего устройства достигается привязка характеристики управляемого по частоте генератора к характеристике ПЧН 7. В соответствии с этим и ЧМ в модуляторе (рис.11), реализуемая под влиянием напряжения ![]() внешнего модулирующего сигнала, происходит по линейному закону.
внешнего модулирующего сигнала, происходит по линейному закону.
Синхронизация несущей частоты (63) управляемого генератора с частотой внешнего генератора производится посредством системы ФАПЧ, принцип действия которой достаточно полно изложен в работе [1].
При несовпадении частот, действующих на входах ЦЧФД, на выходе последнего образуется разность напряжений соответствующей полярности, которая после усиления в ДУ, сумматоре и сравнивающем устройстве воздействует на управляемый генератор так, что его частота совпадает с частотой сигнала ![]() внешнего генератора. Более того, из-за достаточно большого коэффициента передачи в цепи регулирования системы ФАПЧ разность фаз между сигналами, действующих на входах ЦЧФД, устанавливается близкой к нулю и всякое изменение частоты внешнего генератора сопровождается подстройкой частоты управляемого генератора так, что эта разность фаз приобретает определенное значение. Таким образом, частоты внешнего генератора и управляемого генератора совпадает с точностью до фазы независимо от состояния первого генератора.
внешнего генератора. Более того, из-за достаточно большого коэффициента передачи в цепи регулирования системы ФАПЧ разность фаз между сигналами, действующих на входах ЦЧФД, устанавливается близкой к нулю и всякое изменение частоты внешнего генератора сопровождается подстройкой частоты управляемого генератора так, что эта разность фаз приобретает определенное значение. Таким образом, частоты внешнего генератора и управляемого генератора совпадает с точностью до фазы независимо от состояния первого генератора.
Зная характеристику управления генератора с учетом коэффициента передачи сумматора, который может быть реализован на основе инвертирующей ОС, можно определить требуемый уровень модулирующего напряжения ![]() для достижения необходимой девиации частоты
для достижения необходимой девиации частоты ![]() выходного сигнала и минимальную модулирующую частоту
выходного сигнала и минимальную модулирующую частоту ![]() при соответствующем индексе модуляции, например,
при соответствующем индексе модуляции, например, ![]() .
.
Характерной особенностью частотного модулятора является то, что при линейной характеристике управляемого генератора и постоянном уровне модулирующего напряжения девиация частоты ![]() остается неизменной при перестройке частоты внешнего генератора и, следовательно, частоты генератора.
остается неизменной при перестройке частоты внешнего генератора и, следовательно, частоты генератора.
Практическая реализация всех функциональных блоков, входящих в линейный модулятор (см. рис.11), за исключением ЦЧФД и делителей частоты 10 и 11, которые в простейшем варианте могут быть осуществлены на основе последовательного соединения Т - триггеров, изложена выше. ЦЧФД является наиболее ответственным функциональным блоком, и его принципы построения необходимо рассмотреть отдельно.
5. Цифровой частотно-фазовый демодулятор
Аналоговый фазовый демодулятор (ФД), используемый в системе ФАПЧ [1], обладает существенным недостатком - ограниченной полосой захвата, т.е. система ФАПЧ не работает при первоначальном частотном сдвиге определенной величины, так как данный ФД не формирует управляющего напряжения в правильном направлении. В отличие от аналогового ЦЧФД, представленный на рис.12, при любом фазовом сдвиге вырабатывает сигнал с правильным знаком расстройки сравниваемых частот.
Принцип действия ЦЧФД, содержащего два ![]() -триггера D1, D2 и элемент И-НЕ D3, осуществляющий задержку распространения информации, основан на преобразовании сдвига фаз входных импульсных сигналов
-триггера D1, D2 и элемент И-НЕ D3, осуществляющий задержку распространения информации, основан на преобразовании сдвига фаз входных импульсных сигналов ![]() и
и ![]() (рис.13, а, б) в длительность импульсов на инверсных выходах
(рис.13, а, б) в длительность импульсов на инверсных выходах ![]() -триггеров
-триггеров ![]() и
и ![]() (рис. 13, в, г).
(рис. 13, в, г).
В исходном состоянии триггеры D1 и D2 формируют единичные сигналы и на их инверсных выходах присутствуют низкие потенциалы (см. рис.13,в,г). С приходом первого импульса из последовательности импульсов ![]() (см.рис.13,а) на синхронизирующий вход первый триггер D1 устанавливается в нулевое состояние (см. рис. 13, в), так как его D-вход соединен с общей шиной. При поступлении первого импульса из последовательности импульсов
(см.рис.13,а) на синхронизирующий вход первый триггер D1 устанавливается в нулевое состояние (см. рис. 13, в), так как его D-вход соединен с общей шиной. При поступлении первого импульса из последовательности импульсов ![]() (см. рис. 13, б) на синхронизирующий вход второй триггер D2 также переходит в нулевое состояние (см. рис. 13, г).
(см. рис. 13, б) на синхронизирующий вход второй триггер D2 также переходит в нулевое состояние (см. рис. 13, г).
Высокие потенциалы с инверсных выходов D-триггеров инвертируются в элементе И-НЕ D3 и нулевой потенциал с его выхода устанавливает D-триггеры в исходное состояние.
Длительность импульсов на инверсном выходе первого D-триггера D1 (см. рис. 13, в) зависит от сдвига фаз между сигналами ![]() и
и ![]() , а длительность импульсов на инверсном выходе второго D-триггера D2 определяется задержкой сигнала в используемых ИС и составляет сотые доли микросекунды (короткие импульсы на рис. 13, г).
, а длительность импульсов на инверсном выходе второго D-триггера D2 определяется задержкой сигнала в используемых ИС и составляет сотые доли микросекунды (короткие импульсы на рис. 13, г).
Такое соотношение между длительностями импульсов на выходах D-триггеров наблюдается при частотах входных сигналов ![]() . В случае
. В случае ![]() все происходит наоборот (см. рис. 13, в, г).
все происходит наоборот (см. рис. 13, в, г).
При ![]() длительность импульсов на инверсных выходах
длительность импульсов на инверсных выходах ![]() -триггеров D1 и D2 постоянна и зависит от сдвига фаз
-триггеров D1 и D2 постоянна и зависит от сдвига фаз ![]() входных сигналов, причем если
входных сигналов, причем если
![]() 0, то импульсы, пропорциональные сдвигу фаз, присутствуют на выходе первого D-триггера, а если
0, то импульсы, пропорциональные сдвигу фаз, присутствуют на выходе первого D-триггера, а если ![]() - то на выходе второго D-триггера.
- то на выходе второго D-триггера.
![]() и
и ![]() , выделяя постоянную составляющую импульсов, действующих на выходах
, выделяя постоянную составляющую импульсов, действующих на выходах ![]() -триггеров, формируют фазовую характеристику ЦЧФД (рис. 14)
-триггеров, формируют фазовую характеристику ЦЧФД (рис. 14)
![]() , (64)
, (64)
где ![]() и
и ![]() - амплитуда и период анализируемых сигналов.
- амплитуда и период анализируемых сигналов.
Временной сдвиг ![]() (64) пропорционален фазе
(64) пропорционален фазе ![]() в пределах
в пределах ![]() , и это определяет линейную область изменения фазы
, и это определяет линейную область изменения фазы ![]() . Выходное напряжение ЦЧФД за пределами данной области в точках а и б скачкообразно уменьшается от
. Выходное напряжение ЦЧФД за пределами данной области в точках а и б скачкообразно уменьшается от ![]() до
до ![]() 0 (рис. 13, е, ж), а затем изменяется с сохранением первоначального направления. В связи с этим фазовая характеристика ЦЧФД (см. рис. 14) приобретает пилообразный вид.
0 (рис. 13, е, ж), а затем изменяется с сохранением первоначального направления. В связи с этим фазовая характеристика ЦЧФД (см. рис. 14) приобретает пилообразный вид.
Данная характеристика принципиально отличается от характеристики аналогового ФД ![]() тем, что выходное напряжение (64) при
тем, что выходное напряжение (64) при ![]() 0 всегда положительно, а при
0 всегда положительно, а при ![]() 0 - всегда отрицательно. Этим и объясняется частотная чувствительность ЦЧФД (рис. 15).
0 - всегда отрицательно. Этим и объясняется частотная чувствительность ЦЧФД (рис. 15).
Если, например, частота одного сигнала ![]() больше частоты
больше частоты ![]() второго сигнала
второго сигнала ![]() , то фазовый сдвиг возрастает пропорционально времени всегда в положительном направлении. При этом пилообразное напряжение приобретает среднее значение (
, то фазовый сдвиг возрастает пропорционально времени всегда в положительном направлении. При этом пилообразное напряжение приобретает среднее значение (![]() 0). При обратном соотношении частот
0). При обратном соотношении частот ![]()
![]() 0 (см. рис. 15). По данной причине система ФАПЧ с ЦЧФД имеет полосу захвата теоретически бесконечно большую, а на практике ограничивается диапазоном перестройки по частоте используемого управляемого генератора.
0 (см. рис. 15). По данной причине система ФАПЧ с ЦЧФД имеет полосу захвата теоретически бесконечно большую, а на практике ограничивается диапазоном перестройки по частоте используемого управляемого генератора.
Таким образом, рассмотренный ЦЧФД (см. рис. 12) выполняет роль частотного демодулятора (компаратора) при частотах ![]() (см. рис. 15) и роль ФД при совпадении анализируемых частот
(см. рис. 15) и роль ФД при совпадении анализируемых частот ![]() (см. рис. 14).
(см. рис. 14).
Номиналы выходных ФНЧ ЦЧФД (см. рис. 12) рассчитывают, исходя из частот среза ![]() , которые должны быть намного меньше частоты модуляции
, которые должны быть намного меньше частоты модуляции ![]() :
:
 .
.
Частотный диапазон работы ЦЧФД определяется предельной частотой функционирования используемых D-триггеров и элемента И-НЕ. При реализации ЦЧФД на основе стандартных ИС 1554-й серии, в состав которой входят двойной D-триггер (1554ТМ2) и 4 элемента И-НЕ (1554ЛА3), рабочий диапазон частот может быть получен до 100 МГц.
ЗАКЛЮЧЕНИЕ
За последнее время существенно повысился технический уровень электронной техники. Интегральная микросхемотехника в своем развитии достигла высокого уровня. Быстрое развитие требует создания все более точного и сложного автоматизированного технологического оборудования. Однако, вместе с этим мы получаем возможность создания более сложных и совершенных устройств с лучшими характеристиками и параметрами, уменьшение их габаритов.
В процессе выполнения данной курсовой работы мы ознакомились с общими принципами построения таких узлов радиоприемных устройств как различные виды модуляторов, изучили основные методы их проектирования с использованием микросхемотехники. Получили практические навыки проектирования, расчета и моделирования узлов радиоприемника с использованием ПЭВМ.
Исследованию подлежали: линейный частотный модулятор, цифровой частотно-фазовый демодулятор и прецизионный амплитудный модулятор. Разработанные схемы устройств работают в широком диапазоне частот 100-250 МГц с диапазоном управляющих напряжений 0-10 В.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. С в и р и д В.Л. Микросхемотехника аналоговых электронных устройств: Учеб. Пособие для радиотехн. спец. вузов. – Дизайн ПРО, 1998. – 256с.
2. С в и р и д В.Л. Проектирование микроэлектронных устройств: Учеб. Пособие по курсу “Микросхемотехника”: В 4 ч. Ч.2: Методология, основы метрологии, проектирование и расчет электронно-управляемых образцовых проводимостей. – Мн.: БГУИР, 1994. – 76 с.
3. А.с. 1132258 СССР, МКИ3 G 01 R 27/26. Устройство для автоматического измерения параметров нелинейных элементов / В.Л. Свирид. – Заявл. 02.08.83; Опубл. 30.12.84, Бюл. N 48. – 17 с.
4. С в и р и д В.Л. Экспериментальная микросхемотехника: Лаб. Практикум по курсу “Микросхемотехника ”: В 3 ч. Ч. 1: Исследование дифференциальных и операционных усилителей. – Мн.: БГУИР, 1995. – 61 с.
5. С в и р и д В.Л. Электронно-управляемые фазовращатели // Новые информационные технологии в науке и производстве: Материалы международ. науч.-техн. конф. – Мн.: БГУИР, 1998. – С. 189-192.
6. С в и р и д В.Л. Прецизионные источники опорного напряжения на основе полевых транзисторов // Радиотехника и электроника. – Мн.: ЗАО “Юникап”, 1999. – Вып. 24. – С.150-156.
7. С в и р и д В.Л. Метод линеаризации и термостабилизации характеристик нелинейных элементов // Радиотехника – М.: ВНТОРЭиС им. А.С. Попова, 1991. – N11. – С. 56 – 58.
8. С в и р и д В.Л. Измерение полных проводимостей при неблагоприятных соотношениях составляющих // Радиотехника и электроника. – Мн.: Выш. шк., 1975. – Вып. 4. – С. 98 – 104.
9. Пат. 2020616 РФ, МКИ5 G 01 С 27/00. Аналоговое запоминающее устройство / В.Л. Свирид. – Заявл. 25.02.91; Опубл. 30.09.94, Бюл. N 18. - 7 с.