| Скачать .docx |
Курсовая работа: Дослідження розбавлювача димових газів по каналу регулювання "витрата повітря – температура димових газів"
Дослідження розбавлювача димових газів по каналу регулювання "витрата повітря - температура димових газів"
Зміст
1. Ідентифікація об’єкта керування
1.1 Планування і проведення експерименту
1.2 Апроксимація часової характеристики математичними виразами
2. Розрахунок оптимальних настроювань регулятора
2.1 Визначення області стійкості системи
2.2 Розрахунок перехідного процесу
3. Розрахунок звужуючого пристрою
4. Розрахунок виконавчого механізму
5. Вибір і розрахунок метрологічних показників
6. Розрахунок контуру регулювання на надійність
1. Ідентифікація об’єкта керування
1.1 Планування і проведення експерименту
При дослідженні динаміки об'єкта необхідно вивчити технологічний процес, проаналізувати роботу об'єкта в режимі нормальної експлуатації, вибрати методи дослідження і вид вхідного впливу; провести вибір і монтаж контрольно-вимірювальної апаратури.
Проведення експерименту по зняттю часової характеристики проходить у такий спосіб:
перед нанесенням збурювання стабілізуються всі істотні вхідні збурювання: витрату палива, вторинного повітря та ін;
наносять кілька короткочасних збурень заданої форми, щоб зміна вихідної величини не перевищувала припустимих значень;
вносять східчасте збурювання переміщенням регулюючого органа і записують значення вихідної величини до одержання ділянки з урівноваженою швидкістю її зміни;
експеримент проводять запланована кількість разів.
У даній роботі були проведені дослідження розбавлювача димових газів по каналу регулювання "витрата повітря - температура димових газів". Витрату повітря змінювали на 10%, з 200 м3 /год до 180 м3 /год.
Систему камери розбавляння можна вважати об'єктом, для якого передатна функція в загальному випадку має вигляд:
 , (1)
, (1)
де  - коефіцієнт підсилення об'єкта в безрозмірному виді; T1,
Т2
- постійні часу.
- коефіцієнт підсилення об'єкта в безрозмірному виді; T1,
Т2
- постійні часу.
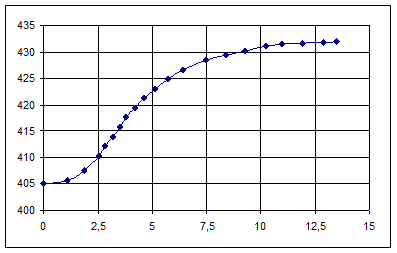
Результати проведення експерименту по зняттю часової характеристики представлена в таблиці 1. і на рис.1. Час запізнювання складає 0,12 хвилини.
Таблиця 1 - Експериментальна часова характеристика
| Т, 0 С | t, хв |
| 405,00 | 0,00 |
| 406,80 | 1,08 |
| 408,60 | 2,05 |
| 410,40 | 2,45 |
| 412, 20 | 2,83 |
| 414,00 | 3, 20 |
| 415,80 | 3,51 |
| 417,60 | 3,82 |
| 419,40 | 4,23 |
| 421, 20 | 4,64 |
| 423,00 | 5,15 |
| 424,80 | 5,73 |
| 426,60 | 6,44 |
| 428,40 | 7,46 |
| 429,30 | 8,38 |
| 430, 20 | 9,27 |
| 431,10 | 10,23 |
| 431,48 | 10,97 |
| 431,66 | 11,93 |
| 431,86 | 12,88 |
| 431,99 | 13,50 |
| 432,00 | 14,00 |
|
|
1.2 Апроксимація часової характеристики математичними виразами
Апроксимація - заміна графіка математичними вираженнями. Динамічні властивості об'єкта регулювання характеризуються диференціальними вираженнями, перехідними і передатними функціями, частотними характеристиками, між якими існує однозначна залежність. При розрахунку автоматичних систем регулювання, математичну модель зручно представити у виді передатної характеристики. Одержати її можна в результаті апроксимації тимчасової характеристики. Розроблено велику кількість методів аналізу перехідної характеристики з метою одержання передатної функції лінійного об'єкта регулювання. Суть методів складається у визначенні коефіцієнтів передатної функції, заздалегідь обраного виду, підставка яких зводиться до одержання розрахункової характеристики щонайкраще співпадаючої з експериментальної.
Існує кілька методів апроксимації: графічно-логарифмічний, метод площ, метод рішення диференціальних рівнянь, апроксимацією різними ланками й ін.
Розрахунок здійснюється за допомогою ЕОМ. Вихідними даними для розрахунку є експериментальна перехідна характеристика об'єкта, задана у виді рівновіддалених за часом ординат, і величина вхідного сигналу.
Для апроксимації перехідної характеристики даного об'єкта використовуємо метод апроксимації аперіодичною ланкою другого порядку і ланкою запізнювання.
Сума всіх постійних часу і часу запізнювання передатної функції виду
 (2)
(2)
є площа між нормованою перехідною характеристикою і лінією сталого значення.
S = T1 + T2 + … + Tm + t (3)
Величина S обчислюється методом трапецій і повідомляється користувачеві. Користувач сам вибирає кількість і значення постійних часу. Можна ввести кілька варіантів значень цих параметрів. Програма методом Эйлера обчислює нормування перехідних характеристик для кожного варіанта. Точність апроксимації характеризується критерієм I, що обчислюється по формулі:
 (4)
(4)
Значення експериментальної і розрахункової характеристик виводяться в текстовий файл, на підставі якого на екран виводяться їхній графік.
Аналізуючи вид графіків, і значення критерію I, користувач оцінює результати апроксимації і приймає рішення про продовження роботи або про печатці значень параметрів для обраного варіанта.
У результаті проведення апроксимації на ЕОМ отримана передатна функція об'єкта:
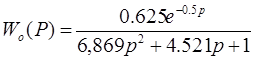
Коефіцієнти передатної функції: К = 0,625; Т1 = 4,521; Т22 = 6,869;
t = 0,5. Точність апроксимації s =0.00035
Результати розрахунків приведені в таблиці 2. і на рисунку 2.
Таблиця 2 - Результати апроксимації перехідної характеристики.
| Т, С | t, хв | Т, С | t, хв |
| 405,00 | 0,00 | 424,79 | 5,73 |
| 405,7 | 1,08 | 426,60 | 6,44 |
| 407,5 | 2,05 | 427,95 | 7,46 |
| 410,40 | 2,48 | 429,30 | 8,38 |
| 412,18 | 2,83 | 430,11 | 9,27 |
| 413,99 | 3, 20 | 430,92 | 10,23 |
| 415,80 | 3,51 | 431,41 | 10,97 |
| 417,58 | 3,82 | 431,65 | 11,93 |
| 419,39 | 4,23 | 431,84 | 12,83 |
| 421, 20 | 4,64 | 431,95 | 13,50 |
| 423,00 | 5,15 | 432, 19 | 14,00 |
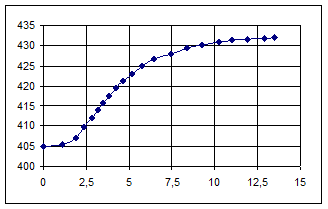
Рисунок 2 - Результати апроксимації перехідної характеристики.
2. Розрахунок оптимальних настроювань регулятора
2.1 Визначення області стійкості системи
Найбільш оптимальним законом регулювання є ПІ - закон регулювання.
Настроєчні параметри ПІ - регулятора C0 і C1 є функціями частоти ω, коефіцієнта підсилення К, постійних часу Т1 і Т2 і часу запізнювання τ.
C0 = ƒ0 (ω, K, T1 , T2 , τ) (5)
C1 = ƒ1 (ω, K, T1 , T2 , τ) (6)
Для одержання рівнянь, по яких можна визначити чисельні значення C0 і C1 , необхідно виконати кілька перетворень.
Передатна функція обраного ПІ - регулятора:
 (7)
(7)
У замкнутій системі регулювання при відсутності зовнішніх збурювань передатні функції об'єкта і регулятора зв'язані співвідношенням:
Wo (p) ×Wp (p) = 1 (8)
Оптимальні параметри настроювання регулятора визначають по зворотній розширеній амплітудно-фазовій характеристиці (РАФХ), використовуючи систему рівнянь
С0 = ω× (m2 + 1) ×Im* (ω,m) 0 (9), C1 = m×Im* (ω,m) 0 - Re* (ω,m) 0 (10)
деω - частота коливань;
m - ступінь коливання системи;
Im* (ω,m) 0 - мнима частина зворотної розширеної амплітудно - фазової характеристики об'єкта;
Re* (ω,m) 0 - її речовинна частина.
Щоб визначити Im* (ω,m) 0 і Re* (ω,m) 0 у зворотній передатній функції об'єкта W* (p ) = 1/W0 (p ), оператор р заміняють на (i-m) ×ω, виключають мниму частину в знаменнику і після перетворень одержуємо рівняння для об'єкта другого порядку
![]() (11)
(11)
![]() (12)
(12)
Отримані вираження Im* (ω,m) 0 і Re* (ω,m) 0 підставляють у рівняння для визначення С1 і С0 і змінюють значення частоти коливань від нуля доти, поки С0 не стане менше нуля, потім будують графік лінії рівного ступеня загасання С0 =ƒ (С1 ).
Оптимальні параметри настроювання регулятора вибирають правіше максимуму кривої лінії рівного ступеня загасання.
Розрахунок оптимальних параметрів настроювань регулятора проводився з використанням комп'ютерної програми OPTIMNEW.
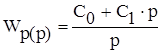
За результатами розрахунків С0 і С1 побудована лінія рівного ступеня загасання, представлена на рисунку 3. Значення коефіцієнтів ko =0.625; T1 =4,521; Т22 =6,869; t_зап. = 0,5; m = 0,22. Отримані оптимальні параметри С1= 7,782 і С0=1,653Кп =7,782Ти =0,605.
Усередині області стійкості, обмеженою кривою і віссю абсцис, кожній крапці на площині відповідають визначені значення настроєчних параметрів С0 і С1 , при яких буде забезпечена стійкість перехідних процесів у системі автоматичного регулювання.
При всіх значеннях настроєчних параметрів, що лежать поза обмеженою областю, ступінь загасання буде менше заданою.
Значення настроєчних параметрів, що лежать на перетинанні отриманої кривої з віссю абсцис (С0 = 0) відповідають ПІ - регуляторові з твердим зворотним зв'язком і процес загасання характеризується залишковою нерівномірністю. Багаторічний досвід настроювання регуляторів показав, що значення оптимальних параметрів С0 і С1 варто вибирати трохи правіше максимальної крапки на кривому рівному ступені загасання.
Таким чином, передатна функція регулятора має вигляд:
2.2 Розрахунок перехідного процесу
Після визначення значень настроєчних параметрів автоматичного регулятора, необхідно одержати безпосередньо графік перехідного процесу. В основному інтерес представляє характер процесу, що відбувається при впливі, що візьметься, у формі стрибка.
Це більш важко переноситься системою автоматичного регулювання, чим плавно змінюється вплив.
|
|
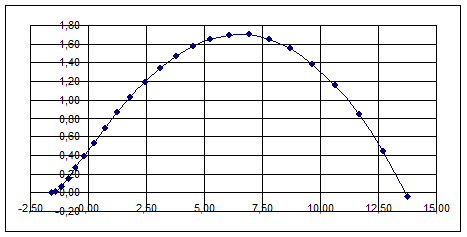
Рисунок 3 - Лінія рівного ступеня загасання:
n об'єкта = 2 ko = 0.625; T1 = 4,521; Т22 = 6,869;
t_запізн =0,5; m =0.220; Кп =7.782Ти =0.605
Основними вимогами, яким повинний задовольняти оптимальний процес регулювання є:
1. Інтенсивне загасання перехідного процесу.
2. Максимальне відхилення регульованої величини повинне бути найменшим.
3. Мінімальна тривалість перехідного процесу.
Основними показниками якості є:
час регулювання,
перерегулювання,
коливність,
стала помилка.
Непрямими оцінками якості регулювання є:
ступінь стійкості, що дорівнює речовинної частини кореня найближчого до мнимої осі;
ступінь загасання, рівний відношенню різниці двох сусідніх амплітуд одного знака кривій перехідного процесу до більшого з них.
Збільшення ступеня загасання може привести до завищеного відхилення регульованої величини. Якщо динамічні властивості об'єкта в процесі експлуатації змінюються, то варто орієнтуватися на підвищений ступінь загасання, щоб уникнути появи незатухаючих і слабозатухаючих процесів. У деяких випадках важливе зменшення часу регулювання, в інші накладається обмеження на перерегулювання. Досягнення цих цілей можливо за допомогою зміни ступеня загасання (. Оптимальний ступінь загасання лежить в інтервалі (=0,75...0,9, що відповідає коливності m=0,221...0,336. Для побудови перехідного процесу системи необхідно одержати її диференціальне рівняння.
Передатна функція замкнутої системи регулювання має вигляд:
![]() (13)
(13)
Хвых (р) × (1+Wo (р) ×Wp (р)) = Хвых (р) × (Wo (р) ×Wp (р)) (14)
 (11)
(11)

 (12)
(12)
Звідси диференціальне рівняння системи буде мати вигляд:

![]() (13)
(13)
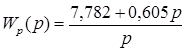
При побудові перехідного процесу замкнутої системи автоматичного регулювання використовувалася ЕОМ. Рішення останнього рівняння проводилося чисельним методом. Отриманий перехідної процес представлений на рисунку 2.
З рисунка 4 видно, що величина максимального відхилення регульованого параметра складає 7,5 0 С (1,82%), а час перехідного процесу при величині залишкового відхилення D = 0,7 0 С складає 18 хв.
|
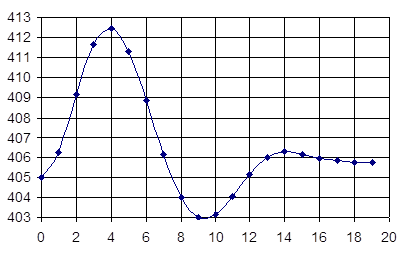
Рисунок 4 - Перехідний процес у замкнутій АСР.
Процес розрахований для наступних даних: Об’ект 2-го порядку + ПІ-регулятор. n об'єкта = 2 ko = 0.625; T1 = 4,521; Т22 = 6,869; t_запізн = 0,5; m = 0.220; Кп = 7.782 Ти = 0.605
3. Розрахунок звужуючого пристрою
Звужуючий пристрій в комплекті з дифманометром витратоміром застосовуються для виміру витрати рідини, чи газу пари по методу перемінного перепаду тиску.
Методика і формули розрахунку звужуючих пристроїв, основні вимоги до витрат, методика їхньої перевірки, а також методика визначення погрішності виміру витрати встановлені правилами стандартизації вимірювальних приладів.
До стандартних звужуючих пристроїв відносяться діафрагми, сопла і сопла Вентуры, що задовольняють вимогам.
При виборі звужуючого пристрою треба мати на увазі наступне:
при тих самих значеннях витрати і перепаду тиску втрата тиску в діафрагмі і соплі однакова;
при тих самих значеннях модуля і перепаду тиску сопло дозволяє вимірювати більша витрата, чим діафрагма, а при Dу £300 мм забезпечує більш високу точність виміру, у порівнянні з діафрагмою;
вимір чи забруднення вхідного профілю звужуючого пристрою в процесі експлуатації впливає на коефіцієнт витрати діафрагми в значно більшому ступені, чим у сопла. Діафрагми застосовують для трубопроводів діаметр яких не менш 50 мм за умови 0,05£ m £0,7.
Абсолютна температура пари перед звужуючим пристроєм визначається по формулі:
Т = 273,15 + t (14)
Внутрішній діаметр трубопроводу при робочій температурі:
D = Kt ' * D20 (15)
де Kt ' - поправочний коефіцієнт на теплове розширення матеріалу трубопроводу, у діапазоні температур 20-60°C може бути прийнятий рівним одиниці.
Число рейнольда при діаметрі D і Qпр визначається по формулах:
Qmax
![]() Re
= 0.354* (16)
Re
= 0.354* (16)
md
Qmin
![]() Re
= 0.354* (17)
Re
= 0.354* (17)
md
Допоміжна величина "С" визначається по формулі:
Qпр
![]() С = (18)
С = (18)
0,01252*D2
*![]()
По номограмі [1] при знайденому значенні "С" і вибираємо "m" знаходимо DРн і Рп - перепад і втрату тиску на діафрагмі.
Допоміжна величина (ma) визначається по формулі:
З
![]() (ma) = (19)
(ma) = (19)
Ед *ÖDРн
де Ед £1 - для пари.
Визначимо для заданого "m" граничне значення "В" по формулі:
В ³ К*104 /D (20)
де К - абсолютна шорсткість трубопроводу.
Верхня границя шорсткості при заданому "m" визначається по формулі
![]() В = 3,9*103
ехр - 142
Ö
m
(21)
В = 3,9*103
ехр - 142
Ö
m
(21)
Якщо В<K*104 /D, то вводимо поправочні коефіцієнти Кп і Кш :
Кш = аm +В (22)
де
а = (С-0,3) * [-1,066 *С2 +0,36*С-0,13] (23)
в = 1+ (C-0,3) * [-0,08C2 +0,024C-0,0046] (24)
С=D/103 (25)
Кп = а +в*е-n* (m-0.05) ( 26)
де
![]() (27)
(27)
у = 0,002+0,2558*С-1,68-С2 +2,864*С3 ( 28)
n = 4,25+142,94* (С-0,05) 1,92 (29)
Значення "m" знаходиться в діапазоні 0,05£ m £0,2, тому Re min =5*103 у діапазоні чисел Рейнольдса Re min =5*103 £ Re £ 108 .
Коефіцієнт витрати визначається по формулі:
 (30)
(30)
Допоміжна величина "F" визначається по формулі (3.18):
![]() (31)
(31)
Відносне відхилення допоміжних величин "С" і "F" визначається по формулі (3.19):
 (32)
(32)
За знайденим значенням "m" визначаємо діаметр отвору діафрагми.
d20
= (33)
(33)
Утрата тиску Рп визначається по формулі:
Pп
=  (34)
(34)
При знайдених значеннях "m", aу , d20 , і DРп перевіримо правильність розрахунку, обчислюємо витрати по формулі (3.22):
 (35)
(35)
Відносне відхилення максимальної витрати при вимірі:
 (36)
(36)
Відокремлюємо погрішності виміру витрати. Погрішності через відхилення діаметрів d і D складають: sd =0,035%, sd =0,15%.
Середня квадратична погрішність через припустимі відхилення діаметра діафрагми знаходиться по формулі:
 (37)
(37)
Середню квадратичну погрішність через припустимі відхилення діаметра трубопроводу визначають по формулі:
![]() (38)
(38)
Середню квадратичну відносну погрішність коефіцієнта витрати розраховують по формулі (3.26):
![]() (39)
(39)
Середню квадратичну відносну погрішність дифманометра, що реєструє, обробленим планіметром із класом точності по витраті S![]() * =1, визначаємо по формулі:
* =1, визначаємо по формулі:
 (40)
(40)
де
![]() - приведена погрішність кореневого планіметра,%
- приведена погрішність кореневого планіметра,%
![]() - абсолютна погрішність ходу діафрагми дифманометра, хв.
- абсолютна погрішність ходу діафрагми дифманометра, хв.
Середню квадратичну відносну погрішність визначення коефіцієнта динамічної в'язкості знаходять по формулі (3.28):
![]() (45)
(45)
Середня квадратична відносна погрішність коефіцієнта кореляції витрати на число Рейнольдса:
![]() (46)
(46)
де
КRe - коефіцієнт кореляції на число Рейнольдса.
КRe
= (47)
(47)
де
С =  (48)
(48)
В =  (49)
(49)
Середню квадратичну відносну погрішність визначення щільності знаходимо:
![]() (50)
(50)
де
Drном - абсолютна погрішність визначення r по таблицях, кг/м3 .
Середня квадратична відносна погрішність виміру витрати розраховується:
![]() (51)
(51)
Гранична погрішність виміру витрати знаходиться з рівняння (3.35):
![]() (52)
(52)
Розрахунок діафрагми за допомогою вищенаведеного алгоритму проведено на ЕОМ. Результати розрахунку приведені нижче. По отриманим даним вибираємо діафрагму камерну ДК6-50 ДСТ 14321-73.
4. Розрахунок виконавчого механізму
Розрахунок виконують у такій послідовності. За видом середовища та його параметрами визначають необхідні дані для розрахунку густини r (кг/м3), кінематичної в’язкості υ (м2/с) і показника адіабати æ.
Знаходять надлишок тиску в лінії ΔРΛ при максимальній витраті:
ΔРΛ =ΔРПР +ΔРМ (53)
При цьому значення ΔРПР і ΔРМ визначають за рівняннями
 (54)
(54)
 (55)
(55)
де ΔРПР - надлишок тиску на прямих ділянках трубопроводу при VМАКС , Н/м2 ;
ΔРМ - надлишок тиску в місцевих опорах при VМАКС , Н/м2;
λі - коефіцієнти гідравлічних опорів тертя, що залежать від режиму руху потоку;
ξj - коефіцієнти місцевих гідравлічних опорів;
Lі - довжина прямих ділянок трубопроводів, м;
Dі - умовні діаметри прямих ділянок трубопроводів, м; ωі, ωj - середні за перерізом швидкості потоку в трубопроводі чи місцевому опорі, м/с.
Величина ω визначається з рівняння:
ω = 4V / πDi23600 (56)
Коефіцієнт λ для круглих шорстких сталевих і чавунних![]() трубопроводів знаходять за формулою, що справджується при Rе >2320:
трубопроводів знаходять за формулою, що справджується при Rе >2320:
 (57)
(57)
де ε = е/Di - відносна шорсткість; е - середня висота виступів, мм.
При величині Rе < 2320 коефіцієнт:
λ = 64/ Rе (58)
Для круглих труб число
Rе = ω iD / υ (59)
Надлишок тиску DРромакс у РО обчислюють при VМАКС за формулою:
![]() (60)
(60)
де ΔРГ = ρgΔh, а Δh - різниця рівня верхньої і нижньої відміток трубопроводу.
Визначають за одним із наступних рівнянь значення пропускної здатності КVМАКС залежно від V МАКС і DРромакс.
Для потоку газу при його докритичному режимі течії, коли ΔРρо <ΔРКР = 0,5Р1 :
 (61)
(61)
При критичному режимі течії газу (ΔРρо >0,5Р1):
 (62)
(62)
де ![]() - максимальна об’ємна витрата газу при нормальних умовах, нм3
/с; r - густина рідини, кг/м3; rн - густина газу при нормальних умовах, кг/м3
; Т1 - температура газу перед РО, К; Р1
- тиск газу перед РО, Н/м2
; Р2 - тиск газу після РО, Н/м2
; К' - коефіцієнт стисливості, що враховує відхилення газу від закону ідеального газу.
- максимальна об’ємна витрата газу при нормальних умовах, нм3
/с; r - густина рідини, кг/м3; rн - густина газу при нормальних умовах, кг/м3
; Т1 - температура газу перед РО, К; Р1
- тиск газу перед РО, Н/м2
; Р2 - тиск газу після РО, Н/м2
; К' - коефіцієнт стисливості, що враховує відхилення газу від закону ідеального газу.
Коефіцієнт стисливості визначається з наступних умов: якщо (Р1-Р2) /Р1<0,08, то К’=1; при (Р1 - Р2) /Р1>0,08 його розраховують із співвідношення
К’=1-[0,46 (Р1 - Р2) /Р1] (63)
За знайденим значенням Кvмакс обчислюють умовну пропускну здатність Кvy, яка перевищує розрахункове значення на 20%, за формулою:
Кvy = 1,2 Кv макс. (63)
Беруть найближче більше значення Кvy, вибирають характеристику РО і визначають діаметр умовного проходу Dу.
Розрахунок регулюючого органу за допомогою вищенаведеного алгоритму проведено на ПЕОМ. Результати розрахунку приведені нижче.
5. Вибір і розрахунок метрологічних показників
Засоби вимірювання технологічних параметрів необхідно обирати у відповідності до вимог технологічного регламента виробничого процесу. При цьому норми і показники технологічних параметрів у регламентах можуть бути представлені двома способами: номінальним значенням (ХН ) з межево-припустимими відхиленнями (e), чи діапазоном припустимих значень параметра (s). Межево-припустиме відхилення - це межі відхилень від ХН , усередині яких припустимо вести технологічний процес з достатньою ефективністю. Діапазон припустимих значень параметра - це область значень технологічного параметра, у якій припустимо вести технологічний процес без суттєвої зміни ефективності. Дані технологічного регламенту є початковими для визначення похибки вимірювання вимірювальних засобів, яка має бути притаманна їм при експлуатації у складі системи автоматизації. Визначення похибки вимірювання здійснюється у відповідності з наступним правилом: похибка вимірювання параметра не повинна перевищувати e/3 чи s/6.
Як правило вимірювання технологічного параметра здійснюється за допомогою вимірювального комплекту, до складу якого входять первинний перетворювач (датчик), проміжний перетворювач (в окремих випадках) і вторинний прилад. Тому похибка вимірювання такого вимірювального комплекту буде залежати від похибки усіх складових.
Розрахунок загальної похибки вимірювального комплекту температури передбачає визначення характеристик складових, що утворюють комплект. Вимірювальний комплект складається з термоелектричного перетворювача типу ТХА-2088 з основною похибкою 0,5% і вторинного приладу класу точності 0,5 з діапазоном шкали 0¸500 0 С та ціною поділки 5 °С, а вимога технологічного регламенту до вимірювання температури задана умовою - (210±10) 0 С.
У відповідності з рис.5 позначення складових похибки наступні: D - вимірювального комплекту; Dвп - вторинного приладу; Dд - термомерта; Dсл - з’єднувальних ліній; Dм - методична; Dсч - зчитування; D1 - основна вторинного приладу; D2 - додаткова внаслідок коливань температури навколишнього повітря для вторинного приладу; D3 - додаткова внаслідок коливань напруги живлення у мережі для вторинного приладу; D4 - додаткова внаслідок впливу магнітних полів; D5 - основна датчика; D6 - додаткова внаслідок нагріву датчика вимірювальним струмом; D7 - динамічна для датчика.
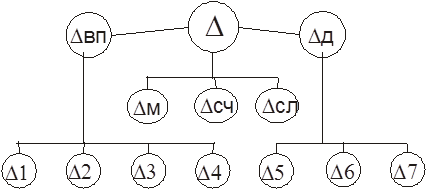 |
Рисунок 5 - Складові похибки вимірювального комплекту температури.
Визначають границі основної похибки:
![]() (64)
(64)
![]()
Додаткові похибки вторинного приладу визначаються згідно технічних умов на вторинний прилад. При цьому відомо, що додаткова похибка D2 не перевищує 0,2 основної похибки на кожні 10 0 С від нормальної температури (20 0 С) у межах робочої області вимірювання. Приймаючи до уваги, що у місцях встановлення приладу температура повітря може змінюватись (D t) від 15 до 35 0 С, величина D2 становить:
![]() (65)
(65)
![]()
Додаткова похибка D3 обчислюється за формулою:
![]() (66)
(66)
![]()
де gU
= 0,25% - додаткова похибка внаслідок коливань напруги у мережі у межах ![]() В встановлена технічними умовами на прилад.
В встановлена технічними умовами на прилад.
Додаткова похибка D4 для вторинного приладу А-542 не нормована, тому D4=0.
Границі основної похибки D5 датчика становить
![]() (67)
(67)
![]()
Додаткова похибка D6 для всіх класів ТСП встановлена на рівні 0,1% при температурі 0 0 С, що відповідає ±0,25 0 С. Похибкою D7 найчастіше зневажають, припускаючи інерційність датчика невелику і достатньо добрі умови теплообміну, тобто D7=0.
Похибка від лінії зв’язку обумовлюється в основному відхиленням номінального опору лінії зв’язку вторинного приладу з ТСП, припустиме значення відхилення якого складає до 0,01 Ом чи приблизно Dлс=±0,2 0 С. Вважаючи умови перемішування достатніми можна додаткову похибку Dм не ураховувати.
Похибка зчитування Dсч для показуючих приладів, що пов’язана з неточністю відліку показань оператором, приймається у практичній роботі на рівні половини ціни поділки, тобто Dсч=±0,5 0 С. Таким чином, підсумкова похибка вимірювального комплекту становить
![]()
Отримане значення похибки вимірювання обраними приладами не перевищує e/3 = 1,0 0 С, що відповідає вимогам технологічного регламенту.
6. Розрахунок контуру регулювання на надійність
Розрахувати надійність контуру регулювання - це означає визначити її кількісні характеристики надійності за відомими характеристиками елементів, з яких складається контур регулювання.
При розрахунку контурів регулювання, що складаються з кількох елементів, ймовірність безвідмовної роботи контуру (Рс ) дорівнює добутку ймовірностей безвідмовної роботи окремих елементів:
 , (68)
, (68)
де: ![]() - кількість елементів контуру;
- кількість елементів контуру;
![]() - ймовірність безвідмовної роботи і-го елемента.
- ймовірність безвідмовної роботи і-го елемента.
Однак на практиці частіше всього для розрахунку ймовірності безвідмовної роботи використовується середня інтенсивність відмов λі тому, що цей параметр присутній в паспортах приладів.
 , (69)
, (69)
де Ті - середній час безвідмовної роботи;
Тоді ймовірність безвідмовної роботи контуру регулювання можна розрахувати за формулою:
 ,
,
де![]() - час роботи елемента контуру;
- час роботи елемента контуру;
![]() - інтенсивність відмов і-го
елементу;
- інтенсивність відмов і-го
елементу;
![]() - кількість елементів в контурі.
- кількість елементів в контурі.
Під час розрахунку ймовірності безвідмовної роботи контуру регулювання треба враховувати, що середня кількість днів роботи контуру протягом року - 300, контур працює 24 години на добу. (300·24=7200 год на рік).
Розглянемо контур регулювання температури. Порівняємо ймовірність безвідмовної роботи контуру, розробленого на локальних засобах та з використанням мікропроцесорного контролеру Р-130 терміном за 1 рік.
![]()
![]()
![]()
![]()
![]()
![]() (2.70)
(2.70)
![]()
де 1-1 - термоелектроперетворювач;
перетворювач;
Реміконт Р-130
підсилювач потужності;
виконавчий механізм.
![]()
![]()
![]()
![]()
![]() (71)
(71)
![]()
Висновок: застосування мікроконтролера збільшує надійність контуру регулювання на 2%