| Скачать .docx |
Курсовая работа: Анализ дискретной системы
Новосибирская государственная академия водного транспорта
Кафедра информационных систем
Курсовая работа на тему "Анализ дискретной системы"
по дисциплине "Математические модели данных, сигналов и систем"
Выполнил студент
Абросимов М.В.
Проверил
преподаватель Голышев Д.Н.
2010
Ключевые слова:
АЧХ, ФЧХ, амплитуда, колебание, импульсную характеристику, система каузальная, алгоритм, дискретная система, система, индекс, период, чистота, устойчивость, фаза.
Объем работы: 17стр.
Количество графиков: 5 рисунков
Использованная литература: 5 источников
Цель работы:
Ознакомиться с системными функциями линейных систем. Приобрести практические навыки анализа дискретной линейной системы.
а0:=1 а1:=1 а2:=1 а3:=1 b1:=0,5 b2:=0,3
Содержание
Введение
Пояснительная записка
Задание I. Разностное уравнение системы
Задание II. Импульсная характеристика
Задание III. Переходная характеристика
Задание IV. Импульсная характеристика
Задание V. Системная функция дискретной системы
Задание VI. АЧХ и ФЧХ
Задание VII. Устойчивость системы
Заключение
Список литературы
Введение
Многоскоростная обработка сигналов (multirate processing) предполагает, что в процессе преобразования цифровых сигналов возможно изменение частоты дискретизации в сторону уменьшения или увеличения и, как следствие, требуемой скорости обработки. Это приводит к более эффективной обработке сигналов, так как открывается возможность значительного уменьшения требуемой вычислительной производительности проектируемой цифровой системы. В последние годы в области многоскоростной обработки сигналов достигнуты громадные успехи. Многоскоростная фильтрация и особенности ее применения стали предметом исследований многочисленных научных работ по цифровой обработке сигналов (ЦОС). Появились десятки монографий и учебных пособий, так или иначе связанных с научными и практическими достижениями в этой области. Совершенно уникальные возможности дает использование многоскоростной обработки в системах адаптивной и нелинейной фильтрации, сжатия, анализа и восстановления речи, звука и изображений.
Пояснительная записка

Предполагается, что на вход системы поступают входные дискретные сигналы x (n ), реакцию на которые называют выходом системы y (n ). Здесь n – это номер дискретного отчета n = 0, 1, 2, 3 …
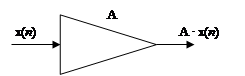
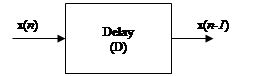
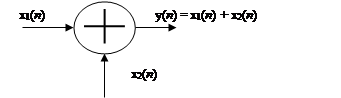
Основные конструктивные элементы дискретных систем.
1. Умножение сигнала на константу А.
2. Задержка сигнала на один отчет n (интервал времени, равный шагу дискретизации сигнала Td ).
3. Сумматор сигналов.
Задание I . Разностное уравнение системы
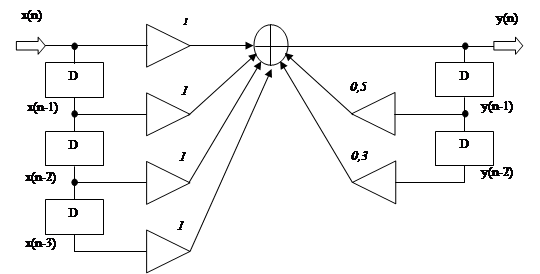
Найдем разностное уравнение системы – это зависимость между дискретными сигналами x (n ) и y (n ).
Для данной схемы получим
y ( n )= x ( n )+ x ( n -1)+ x ( n -2)+ x ( n -3)+0,5* y ( n -1)+0,3* y ( n -2)
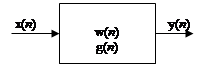
По аналогии с непрерывной системой дискретная система во временной области описывается 2 характеристиками: импульсной (весовой) w(n ) и переходной g(n ).
Задание II . Импульсная характеристика
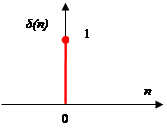
Найдем импульсную характеристику – это реакция системы на входное воздействие в виде дискретной дельта-функции δ (n ), т.е.
если x (n ) = δ (n ), то y (n ) = w (n ), где
![]() .
.
Получим для нашей системы
w ( n )=1* δ ( n )+1* δ ( n -1)+1* δ ( n -2)+1* δ ( n -3)+0,5* w ( n -1)+0,3* w ( n -2)
При этом мы предполагаем, что наша система каузальная или физически реализуемая , что означает, что реакция (отклик) системы не может наступить раньше подачи входного сигнала.
Т.к. входной сигнал подается в момент n = 0, то импульсная характеристика должна быть равна w(n ) = 0 при отрицательных значениях n .
При n = 0 импульсная характеристика системы будет равна
w(0)=δ(0)+δ(0-1)+δ(0-2)+δ(0-3)+0,5*w(0-1)+0,3*w(0-2)
w(0)=1+0+0+0+0+0=1
При n = 1 импульсная характеристика системы будет равна
w(1)=δ(1)+δ(1-1)+δ(1-2)+δ(1-3)+0,5*w(1-1)+0,3*w(1-2)
w(1)=0+1+0+0,5+0=1,5
При n = 2 импульсная характеристика системы будет равна
w(2)=δ(2)+δ(2-1)+δ(2-2)+δ(2-3)+0,5*w(2-1)+0,3*w(2-2)
w(2)=0+0+1+0+(0,5*1,5)+1=2,05
При n = 3 импульсная характеристика системы будет равна
w(3)=δ(3)+δ(3-1)+δ(3-2)+δ(3-3)+0,5*w(3-1)+0,3*w(3-2)
w(3)=0+0+0+1+0,5*2,05+0,3*1,5=2,47
При n = 4 импульсная характеристика системы будет равна
w(4)=δ(4)+δ(4-1)+δ(4-2)+δ(4-3)+0,5*w(4-1)+0,3*w(4-2)
w(4)=0+0+0+0+0,5*2,47+0,3*2,05=1,85
При n = 5 импульсная характеристика системы будет равна
w(5)=δ(5)+δ(5-1)+δ(5-2)+δ(5-3)+0,5*w(5-1)+0,3*w(5-2)
w(5)=0+0+0+0+0,5*1,85+0,3*2,47=1,66
При n = 6 импульсная характеристика системы будет равна
w(6)=δ(6)+δ(6-1)+δ(6-2)+δ(6-3)+0,5*w(6-1)+0,3*w(6-2)
w(6)=0+0+0+0+0,5*1,66+0,3*1,85=1,38
При n = 7 импульсная характеристика системы будет равна
w(7)=δ(7)+δ(7-1)+δ(7-2)+δ(7-3)+0,5*w(7-1)+0,3*w(7-2)
w(7)=0+0+0+0+0,5*1,38+0,3*1,66=1,19
При n = 8 импульсная характеристика системы будет равна
w(8)=δ(8)+δ(8-1)+δ(8-2)+δ(8-3)+0,5*w(8-1)+0,3*w(8-2)
w(8)=0+0+0+0+0,5*1,19+0,3*1,38=1,01
При n = 9 импульсная характеристика системы будет равна
w(9)=δ(1)+δ(9-1)+δ(9-2)+δ(9-3)+0,5*w(9-1)+0,3*w(9-2)
w(9)=0+0+0+0+0,5*1,01+0,3*1,19=0,86
При n = 10 импульсная характеристика системы будет равна
w(10)=δ(10)+δ(10-1)+δ(10-2)+δ(10-3)+0,5*w(10-1)+0,3*w(10-2)
w(10)=0+0+0+0+0,5*0,86+0,3*1,01=0,73
При n = 11импульсная характеристика системы будет равна
w(11)=δ(11)+δ(11-1)+δ(11-2)+δ(11-3)+0,5*w(11-1)+0,3*w(11-2)
w(11)=0+0+0+0+0,5*0,73+0,3*0,86=0,62
При n = 12 импульсная характеристика системы будет равна
w(12)=δ(12)+δ(12-1)+δ(12-2)+δ(12-3)+0,5*w(12-1)+0,3*w(12-2)
w(12)= 0+0+0+0+0,5*0,62+0,3*0,73=0,53
При n = 13 импульсная характеристика системы будет равна
w(13)=δ(13)+δ(13-1)+δ(13-2)+δ(13-3)+0,5*w(13-1)+0,3*w(13-2)
w(13)=0+0+0+0+0,5*0,53+0,3*0,62=0,45
При n = 14 импульсная характеристика системы будет равна
w(14)=δ(14)+δ(14-1)+δ(14-2)+δ(14-3)+0,5*w(14-1)+0,3*w(14-2)
w(14)=0+0+0+0+0,5*0,45+0,3*0,52=0,38
При n = 14 импульсная характеристика системы будет равна
w(15)=δ(15)+δ(15-1)+δ(15-2)+δ(15-3)+0,5*w(15-1)+0,3*w(15-2)
w(15)=0+0+0+0+0,5*0,38+0,3*0,45=0,32
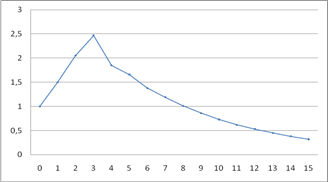
Рисунок 1: импульсная характеристика
Задание III . Переходная характеристика
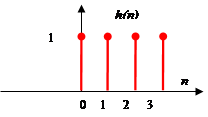
Найдем переходную характеристику – это реакция системы на входное воздействие в виде дискретной функции единичного скачка, т.е.
если x (n ) = h (n ), то y (n ) = g (n ), где
![]()
Получим для нашей системы
g ( n )=1* h ( n )+1* h ( n -1)+1* h ( n -2)+1* h ( n -3)+0,5* g ( n -1)+0,3* g ( n -2)
При этом мы предполагаем, что наша система каузальная или физически реализуемая , что означает, что переходная характеристика должна быть равна g(n ) = 0 при отрицательных значениях n .
При n = 0 переходная характеристика системы будет равна
g(0)=h(0)+h(0-1)+h(0-2)+h(0-3)+0,5*g(0-1)+0,3*g(0-2)
g(0)=1+0+0+0+0+0=1
При n = 1 переходная характеристика системы будет равна
g(1)=h(1)+h(1-1)+h(1-2)+h(1-3)+0,5*g(1-1)+0,3*g(1-2)
g(1)=1+1+0+0+0,5+0=2,5
При n = 2 переходная характеристика системы будет равна
g(2)=h(2)+h(2-1)+h(2-2)+h(2-3)+0,5*g(2-1)+0,3*g(2-2)
g(2)=1+1+1+0+0,5*2,5+0,3=4,55
При n = 3 переходная характеристика системы будет равна
g(3)=h(3)+h(3-1)+h(3-2)+h(3-3)+0,5*g(3-1)+0,3*g(3-2)
g(3)=1+1+1+1+0,5*4,55+0,3*2,5=7,02
При n = 4 переходная характеристика системы будет равна
g(4)=h(4)+h(4-1)+h(4-2)+h(4-3)+0,5*g(4-1)+0,3*g(4-2)
g(4)=1+1+1+1+0,5*7,02+0,3*4,55=8,87
При n = 5 переходная характеристика системы будет равна
g(5)=h(5)+h(5-1)+h(5-2)+h(5-3)+0,5*g(5-1)+0,3*g(5-2)
g(5)= 1+1+1+1+0,5*8,87+0,3*7,02=10,54
При n = 6 переходная характеристика системы будет равна
g(6)=h(6)+h(6-1)+h(6-2)+h(6-3)+0,5*g(6-1)+0,3*g(6-2)
g(6)= 1+1+1+1+0,5*10,54+0,3*8,87=11,93
При n = 7 переходная характеристика системы будет равна
g(7)=h(7)+h(7-1)+h(7-2)+h(7-3)+0,5*g(7-1)+0,3*g(7-2)
g(7)= 1+1+1+1+0,5*11,93+0,3*10,54=13,12
При n = 8 переходная характеристика системы будет равна
g(8)=h(8)+h(8-1)+h(8-2)+h(8-3)+0,5*g(8-1)+0,3*g(8-2)
g(8)= 1+1+1+1+0,5*13,12+0,3*11,93=14,13
При n = 9 переходная характеристика системы будет равна
g(9)=h(9)+h(9-1)+h(9-2)+h(9-3)+0,5*g(9-1)+0,3*g(9-2)
g(9)= 1+1+1+1+0,5*14,13+0,3*13,12=15,0
При n = 10 переходная характеристика системы будет равна
g(10)=h(10)+h(10-1)+h(10-2)+h(10-3)+0,5*g(10-1)+0,3*g(10-2)
g(10)= 1+1+1+1+0,5*15,0+0,3*14,13=15,73
При n = 11 переходная характеристика системы будет равна
g(11)=h(11)+h(11-1)+h(11-2)+h(11-3)+0,5*g(11-1)+0,3*g(11-2)
g(11)= 1+1+1+1+0,5*15,73+0,3*15,0=16,36
При n = 12 переходная характеристика системы будет равна
g(12)=h(12)+h(12-1)+h(12-2)+h(12-3)+0,5*g(12-1)+0,3*g(12-2)
g(12)= 1+1+1+1+0,5*16,36+0,3*15,73=16,90
При n = 13 переходная характеристика системы будет равна
g(13)=h(13)+h(13-1)+h(13-2)+h(13-3)+0,5*g(13-1)+0,3*g(13-2)
g(13)= 1+1+1+1+0,5*16,90+0,3*16,36=17,36
При n = 14 переходная характеристика системы будет равна
g(14)=h(14)+h(14-1)+h(14-2)+h(14-3)+0,5*g(14-1)+0,3*g(14-2)
g(14)= 1+1+1+1+0,5*17,36+0,3*16,90=17,75
При n = 15 переходная характеристика системы будет равна
g(15)=h(15)+h(15-1)+h(15-2)+h(15-3)+0,5*g(15-1)+0,3*g(15-2)
g(15)= 1+1+1+1+0,5*17,75+0,3*17,36=18,08

Рисунок 2: переходная характеристика
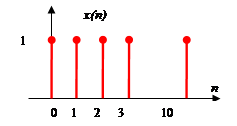
Задание IV . Импульсная характеристика
Найдем отклик системы на входное воздействие следующего вида
![]() .
.
y(n)=1*x(n)+1*x(n-1)+1*x(n-2)+1*x(n-3)+0,5*y(n-1)+0,3*y(n-2)
При n = 0 выходной сигнал системы будет равна
y(0)=x(0)+ x(0-1)+x(0-2)+x(0-3)+0,5*y(0-1)+0,3*y(0-2)
y(0)=1+0+0+0+0+0=1
При n = 1 выходной сигнал системы будет равна
y(1)=x(1)+x(1-1)+x(1-2)-x(1-3)+0,5*x(1-1)+0,3*x(1-2)
y(1)=1+1+0+0+0,5+0=2,5
При n = 2 выходной сигнал системы будет равна
y(2)=x(2)+x(2-1)+x(2-2)+x(2-3)+0,5*y(2-1)+0,3*y(2-2)
y(2)=1+1+1+0+0,5*2,5+0,3=4,55
При n = 3 выходной сигнал системы будет равна
y(3)=x(3)+x(3-1)+x(3-2)+x(3-3)+0,5*y(3-1)+0,3*y(3-2)
y(3)=1+1+1+1+0,5*4,55+0,3*2,5=7,02
При n = 4 выходной сигнал системы будет равна
y(4)=x(4)+x(4-1)+x(4-2)+x(4-3)+0,5*y(4-1)+0,3*y(4-2)
y(4)=1+1+1+1+0,5*7,02+0,3*4,55=8,87
При n = 5 выходной сигнал системы будет равна
y(5)=x(5)+x(5-1)+x(5-2)+x(5-3)+0,5*x(5-1)+0,3*x(5-2)
y(5)=1+1+1+1+0,5*8,87+0,3*7,02=10,54
При n = 6 выходной сигнал системы будет равна
y(6)=x(6)+x(6-1)+x(6-2)+x(6-3)+0,5*y(6-1)+0,3*y(6-2)
y(6)= 1+1+1+1+0,5*10,54+0,3*8,87=11,93
При n = 7 выходной сигнал системы будет равна
y(7)=x(7)+x(7-1)+x(7-2)+x(7-3)+0,5*y(7-1)+0,3*y(7-2)
y(7)= 1+1+1+1+0,5*11,93+0,3*10,54=13,12
При n = 8 выходной сигнал системы будет равна
y(8)=x(8)+x(8-1)+x(8-2)+x(8-3)+0,5*y(8-1)+0,3*y(8-2)
y(8)= 1+1+1+1+0,5*13,12+0,3*11,93=14,13
При n = 9 выходной сигнал системы будет равна
y(9)=x(9)+x(9-1)+x(9-2)+x(9-3)+0,5*y(9-1)+0,3*y(9-2)
y(9)= 1+1+1+1+0,5*14,13+0,3*13,12=15,0
При n = 10 выходной сигнал системы будет равна
y(10)=x(10)+x(10-1)+x(10-2)+x(10-3)+0,5*y(10-1)+0,3*y(10-2)
y(10)= 1+1+1+1+0,5*15,0+0,3*14,13=15,73
При n = 11 выходной сигнал системы будет равна
y(11)=x(11)+x(11-1)+x(11-2)+x(11-3)+0,5*y(11-1)+0,3*y(11-2)
y(11)=0+1+1+1+0,5*15,73+0,3*15,0=15,36
При n = 12 выходной сигнал системы будет равна
y(12)=x(12)+x(12-1)+x(12-2)+x(12-3)+0,5*y(12-1)+0,3*y(12-2)
y(12)=0+0+1+1+0,5*15,36+0,3*15,73=14,40
При n = 13 выходной сигнал системы будет равна
y(13)=x(13)+x(13-1)+x(13-2)+x(13-3)+0,5*y(13-1)+0,3*y(13-2)
y(13)=0+0+0+1+0,5*14,40+0,3*15,36=12,81
При n = 14 выходной сигнал системы будет равна
y(14)=x(14)+x(14-1)+x(14-2)+x(14-3)+0,5*y(14-1)+0,3*y(14-2)
y(14)=0+0+0+0+0,5*12,81+0,3*14,40=10,72
При n = 15 выходной сигнал системы будет равна
y(15)=x(15)+0*x(15-1)+x(15-2)+x(15-3)+0,5*y(15-1)+0,3*y(15-2)
y(15)=0+0+0+0+0,5*10,72+0,3*12,81=9,20
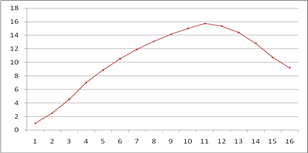
Рисунок 3: выходной сигнал
Задание V . Системная функция дискретной системы
Найдем системную функцию дискретной системы .
Преобразуем разностное уравнение из области отчетов n в область некоторой комплексной переменной z по следующим правилам:
![]() ,
, ![]() ,
, ![]() и т.д.
и т.д.
Тогда получим
y(n)=1*x(n)+1*x(n-1)+1*x(n-2)+1*x(n-3)+0,5*y(n-1)+0,3*y(n-2)
y(z)=1*x(z)+1*x(z)*z-1 +1*x(z)*z-2 +1*x(z)z-3 +0,5*y(z)*z-1 +0,3*y(z)*z-2
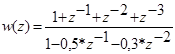
Системная функция W(z ) – это отношение выходного и входного сигналов в области z , равная
![]() .
.
Разделим наше выражение на X(Z)
Тогда получим:
w(z)=1+z-1 +z-2 +z-3 +0,5*w(z)*z-1 +0,3*w(z)*z-2
отсюда получим конечное выражение
Задание VI . АЧХ и ФЧХ
Найдем амплитудно-частотную и фазово-частотную характеристику системы (АЧХ и ФЧХ) .
Для вычисления АЧХ и ФЧХ используем программу MathCad
Зададим коэффициенты системы
а0:=1
а1:=1
а2:=1
а3:=1
b1:=0,5
b2:=0,3
L:=10
ω:=-L,-L+0.05..L
j:=![]()
Передаточная функция системы

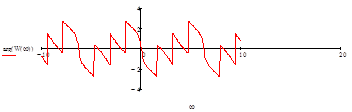
Рисунок 4: АЧX

Рисунок 5: ФЧХ
Обратим внимание, что обе частотные характеристики являются периодическими функциями с периодом повторения, равном частоте дискретизации
 ,
,
где Td – это шаг дискретизации сигнала.
Задание VII . Устойчивость системы
Оценим устойчивость системы
Понятие устойчивости системы связано с ее способностью возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния.
Естественно, что существует граница устойчивости – это мощность силы, выведшей систему из состояния равновесия.
Для этих целей необходимо вычислить полюса системной функции W(z ), т.е. такие значения z , при которых знаменатель системной функции равен нулю. Получим
1-0,5*z-1 -0,3*z-2 =0
Умножим правую и левую часть на z2
Z2 -0,5*z-0,3=0
Z1;2
=![]()
Z1;2 =0.85;-0.35
Если хотя бы одно из полученных значений корня ![]() , то система считается неустойчивой
Z1
=0.85<1
, то система считается неустойчивой
Z1
=0.85<1
Данная система устойчива.
Вывод
Мы ознакомились с системными функциями линейных систем. Приобрели практические навыки анализа дискретной линейной системы, научились строить графики АЧХ и ФЧХ с помощью программы MathCad.
Подводя общий итог проведенных выше исследований, можно утверждать что наша система неустойчива.
Список литературы
1. Основы цифровой обработки сигналов . Курс лекций / А.И. Солонина, Д.А. Улахович, С.М. Арбузов и др. – СПб.: БХВ-Петербург, 2003. – 608 с.
2. Голышев Н.В. , Щетинин Ю.И. Теория и обработка сигналов. Учеб. пособие. – Новосибирск, Изд-во НГТУ, 1998. – Ч.1. – 103 с.
3. Голышев Н.В. , Щетинин Ю.И. Теория и обработка сигналов. Учеб. пособие. – Новосибирск, Изд-во НГТУ, 1998. – Ч.2. – 115 с.
4. Сиберт У.М. Цепи, сигналы, системы. – М.: Мир, 1988. – Ч.1. – 336с.
5. Сиберт У.М. Цепи, сигналы, системы. – М.: Мир, 1988. – Ч.2. – 360с.