| Скачать .docx |
Курсовая работа: Движение по эллиптическому маршруту с регулируемой скоростью и графической визуализацией процесса
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Кузбасский государственный технический университет
Кафедра информационных и автоматизированных производственных систем
Пояснительная записка
к курсовой работе по курсу “Технология программирования”
Содержание
1. Задание
2. Математическая постановка
2.1 Уточнение формулировки задачи
2.2 Математическое описание процесса
2.3 Спецификация переменных (обозначения, типы, назначение, классификация)
2.4 Спецификация объектов (назначение, свойства)
2.5 Организация процесса и расчетные формулы
3. Разработка блок-схемы
4. Текст программы на VB
5. Контрольный пример
6. Инструкция пользователя
Список использованной литературы
1. Задание
Разработать проект программного средства "Движение по эллиптическому маршруту с регулируемой скоростью и графической визуализацией процесса".
Параметры маршрута задаются в м. или км. Скорость движения в м/с или км/час. Образ движущегося объекта – цветное пятнышко, перемещающееся по линии эллипса.
По ходу движения отображаются координаты объекта, пройденный путь от места старта ![]() , время движения, число полных пройденных кругов. По каждому кругу фиксируется средняя скорость и время прохождения.
, время движения, число полных пройденных кругов. По каждому кругу фиксируется средняя скорость и время прохождения.
2. Математическая постановка
2.1 Уточнение формулировки задачи и выбор языка программирования
Для решения задачи необходимо в первую очередь выбрать язык программирования и с помощью его средств и возможностей, решать поставленную задачу.
Для решения задачи воспользуемся языком программирования Visual Basic, поскольку он является идеальным средством для быстрого создания небольших проектов. Средства интегрированной среды разработки языка Visual Basic позволяют использовать Форму, для создания графического интерфейса проекта, что удобно для решения поставленной задачи.
Параметры эллипса, вращающегося тела, используемые объекты, а также их свойства в условии задачи не оговорены, и задаются произвольно, таким образом, чтобы отвечать всем условиям задачи, а также обеспечивать лёгкость применения программы, её функциональность, эффективность, мобильность, надёжность, эстетичность.
2.2 Математическое описание процесса
программный математический пользователь
Параметрически эллипс задаётся в виде: x = a * cos ( fi ) y = b * cos ( fi ), где fi – угол в промежутке [0; 2π]. Эти формулы используются для организации движения объекта по траектории эллипса. Параметры a и b задаются произвольно, подбираются опытным путём, в зависимости от размера формы.
Длина эллипса рассчитывается с помощью эллиптического интеграла, вида  , таким образом, достаточно рассчитать длину дуги эллипса при t € [
0; π/2]
и умножить на 4.
, таким образом, достаточно рассчитать длину дуги эллипса при t € [
0; π/2]
и умножить на 4.
2.3 Спецификация переменных (обозначения, типы, назначение, классификация)
x – текущая координата объекта, тип Single.
y – текущая координата объекта, тип Single.
x 2 – предыдущая координата объекта, тип Single.
y 2 – предыдущая координата объекта, тип Single.
v – мгновенная скорость объекта, тип Single.
fi – угол в радианах, который изменяется во время работы программы, тип Double.
k – переменная, хранящая количество кругов, пройденных объектом, тип Integer.
S – переменная, хранящая путь, пройденный телом, тип Single.
Исходные данные : переменных, хранящих исходные данные, нет.
Результаты : x , y , v , k , S .
Промежуточные результаты : fi , x 2, y 2 .
2.4 Спецификация объектов (назначение, используемые свойства)
Form Form1 – форма, на которой расположены другие объекты управления.
AutoRedra w = -1 'True (рисунки, выполненные графическими методами, автоматически восстанавливаются после изменения размера формы или после того как форма была закрыта другим окном)
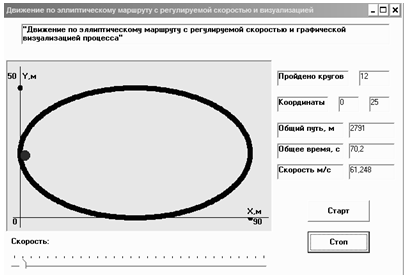
Caption = "Движение по эллиптическому маршруту с регулируемой скоростью и визуализацией" (надпись в заголовке формы)
PictureBox Picture1 – внутри объекта происходит графическая визуализация процесса.
AutoRedraw = -1 'True
ScaleMode = 3 'Pixel (единицы измерения, используемые в системе координат, связанной с объектом)
Height = 3975 (высота объекта)
Width = 6255 (ширина объекта)
Line Line 1 – объект, используемый для изображения оси ординат.
X1 = 20
X2 = 20
Y1 = 8
Y2 = 256
Line Line 2 – объект, используемый для изображения оси абсцисс.
X1 = 408
X2 = 8
Y1 = 240
Y2 = 240
Shape Shape 1 – объект, выводит изображение геометрических фигур, в программе это круг, перемещающийся по лини эллипса.
Shape = 3 'Circle
Width = 240
Height = 240
Label Label 9 – метка, выводит на экран надпись. Располагается на объекте Picture1. Указывает начало координат.
Caption = "0"
Label Label 8 – метка, выводит на экран надпись. Располагается на объекте Picture1. Подпись к оси ординат.
Caption = "Y,м"
Label Label 7 – метка, выводит на экран надпись. Располагается на объекте Picture1. Подпись к оси абсцисс.
Caption = "X,м"
Label Label 13 – метка, выводит на экран надпись. Располагается на объекте Picture1. Подпись к оси ординат.
Caption = "100"
Label Label 14 – метка, выводит на экран надпись. Располагается на объекте Picture1. Подпись к оси абсцисс.
Caption = "50"
Timer Timer 1 – позволяет организовать циклическое повторение группы команд, отвечающих за движение объекта Shape 1, расчёт значений переменных x, y, k, S и их вывод в соответсвующие метки
Enabled = 0 'False (при загрузке формы выключен)
Interval = 1 (промежуток времени в миллисекундах, через который повторяется выполнение команд)
Timer Timer 2 – позволяет организовать циклическое повторение группы команд, отвечающих за движение объекта Shape 1, расчёт значений переменных x2, y2, v и их вывод в соответсвующие метки
Enabled = 0 'False (при загрузке формы выключен)
Interval = 100 (промежуток времени в миллисекундах, через который повторяется выполнение команд)
CommandButton Command 1 – объект управления командная кнопка. Нажатие на кнопку начинает выпонение действий, программный код которых связан с ней, объект Shape 1 начинает движение.
Caption = "Старт"
Height = 495 (высота)
Width = 1455 (ширина)
CommandButton Command 2 – объект управления командная кнопка. Нажатие на кнопку начинает выпонение действий, программный код которых связан с ней, объект Shape 1 прекращает движение.
Caption = "Стоп"
Height = 495 (высота)
Width = 1455 (ширина)
Label Label 12 – метка, выводит на экран надпись. Располагается на объекте Form 1. Подпись к объекту выводящему время с начала движения объекта Shape 1 .
Caption = "Общее время, с"
Left = 6720 (положение объекта, координата х верхнего левого угла объекта)
Top = 2880 (положение объекта, координата y верхнего левого угла объекта)
Label Label 5 – метка, выводит на экран надпись. Располагается на объекте Form 1. Подпись к объекту, выводящему путь, пройденный объектом Shape 1 .
Caption = "Общий путь, м"
Left = 6720
Top = 2400
Label LabelY – метка, в которую выводится координата Y. Располагается на объекте Form 1.
BorderStyle = 1 'Fixed Single (задаёт рамку вокруг метки)
Left = 8880
Top = 1800
Label LabelX
BorderStyle = 1 'Fixed Single
Left = 8160
Top = 1800
Label Label 10 – метка, выводит на экран надпись. Располагается на объекте Form 1. Подпись к меткам, выводящим текущие координаты объекта Shape 1 .
Caption = "Координаты"
Left = 6720
Top = 1800
Label Label 6 – метка, выводит на экран надпись. Располагается на объекте Form 1. Подпись к метке, выводящей мгновенную скорость объекта Shape 1 .
Caption = "Скорость:"
Left = 480
Top = 5040
LabelK – метка, в которую выводится количество полных кругов. Располагается на объекте Form 1.
Caption = "0"
Left = 8640
Top = 1200
Label LabelV LabelK – метка, в которую выводится количество полных кругов, пройденных объектом Shape 1 . Располагается на объекте Form 1.
Caption = "0" (изначально количество кругов считается равным 0)
Left = 8400
Top = 3360
Label Label 3 – метка, выводит на экран надпись. Располагается на объекте Form 1. Подпись к метке, выводящей число кругов, пройденных объектом Shape 1.
BorderStyle = 1 'Fixed Single
Caption = "Пройдено кругов"
Left = 6720
Top = 1200
Label Label 2 – метка, выводит на экран надпись. Располагается на объекте Form 1. Подпись к метке, выводящей скорость объекта Shape 1.
Caption = "Скорость м/c"
Left = 6720
Top = 3360
Label Label 1 – метка, выводит на экран надпись. Располагается на объекте Form 1.
Caption = "Движение по эллиптическому маршруту с регулируемой скоростью и графической визуализацией процесса"
Slider Slider 1 – объект управления, с помощью которого регулируется скорость движения объекта Shape 1.
Max = 30 (максимальное число делений)
Value = 2 (деление на котором располагается бегунок по умолчанию)
2.5 Организация процесса и расчетные формулы
Организовывается процесс работы программы следующим образом. При запуске программы появляется форма, на которой отображаются объекты управления. Для объекта Picture 1 свойство DrawWidth = 8, это толщина точек, при помощи которых на объекте изображается эллипс, прорисовка точек с использованием метода PSet происходит в теле цикла For…Next следующим образом: Picture1.PSet (180 * Cos(i) + 200, 100 * Sin(i) + 140)
В результате выполнения цикла получаем изображение эллипса, у которого большая полуось равна 90,а малая 50, и смещённым относительно левого верхнего угла объекта Picture 1 на 200 пикселей влево и 140 – вниз.
С помощью метода PSet рисуются точки на осях абсцисс и ординат, задающие единичный отрезок. Масштаб задан следующий 360 пикселей = 100 метров. Таким образом, для пользователя большая полуось будет составлять 45 метров, а меньшая – 50 метров.
При нажатии на командную кнопку Command 1 проверяется условие если Slider1.Value = 0, таймер, организующий движение объекта не включается (Timer1.Enabled = False) так как это означает, что скорость равна нулю. Во всех остальных случаях таймер включается (Timer1.Enabled = True).
При нажатии на командную кнопку Command 2 таймеры Timer 1 и Timer 2 выключаются Timer1.Enabled = False: Timer2.Enabled = False, что приводит к остановке движения тела и остановке отсчёта времени.
Теперь последовательно рассмотрим программный код процедур Timer1_Timer() и Timer2_Timer().
С помощью объекта Timer1, организуется движение объекта. В первую очередь активируется Timer 1. Затем рассчитываются координаты объекта Shape 1 по формулам
x = 180 * Cos(fi) + 200
y = 100 * Sin(fi) + 140
Формулы совпадают с формулами, по которым происходила прорисовка эллипса, это обеспечивает то, что объект движется по траектории, совпадающей с эллипсом. После того как координаты рассчитаны, они присваиваются свойствам Left и Top объекта Shape 1, определяющих положение объекта на объекте Picture 1. Также координаты выводятся в соответствующие метки на форме LabelX.Caption = (x - 20) \ 4: LabelY.Caption = (240 - y) \ 4.
Переменная fi изменяется по закону fi = fi + (Slider1.Value / 2) * 3.1415 / 180, т.е. угол разбиения, а следовательно и скорость объекта Shape 1 , зависит от свойства Value, объекта Slider1, иначе говоря от положения бегунка.
Число полных кругов, пройденных объектом Shape 1, рассчитывается по формуле k = Int(fi / 6.28), и после расчёта выводится в соответствующую метку LabelK.Caption = k.
Пройденный телом путь, рассчитывается по формуле S = Round(223.112 / 6.28 * fi).
Число 223.112 – это длина эллипса в метрах, рассчитана с помощью определённого интеграла:
4*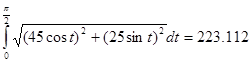 .
.
После расчёта значение выводится в соответствующую метку LabelS.Caption = S.
Свойство Interval объекта Timer 1 , равно 1, это значит, что все описанные выше действия повторяются 1 раз в миллисекунду. Величина интервала подобрана опытным путём.
В программном коде процедуры Timer2_Timer() осуществляется подсчёт времени, по формуле LabelTime.Caption = LabelTime.Caption + 0.1,а свойство Interval объекта Timer2 равно 100, что обеспечивает отсчёт времени в секундах, с точностью до десятых.
Скорость объекта Shape 1 , рассчитывается по формуле v = (Sqr((x2 - x) ^ 2 + (y2 - y) ^ 2)) / (Timer2.Interval) * 1000. Расстояние между двумя соседними точками определяется как корень квадратный из суммы квадратов разностей координат этих точек, и делится на время, т.е интервал таймера Timer 1.
3. Разработка блок-схемы
Представим графический алгоритм, в виде блок-схемы, для процедуры Private Sub Timer1_Timer(), отвечающей за передвижение тела по эллиптической траектории.

4. Текст программы на VB
Dim fi As Double 'угол'
Dim x As Integer 'текущая координата Х
Dim y As Integer 'текущая координата Y
Dim x2 As Integer
Dim y2 As Integer
Dim v As Single 'скорость тела
Private Sub Command1_Click()
If Slider1.Value = 0 Then Timer1.Enabled = False Else Timer1.Enabled = True 'при нажатии на СТАРТ если скорость установлена 0,тело не движется
End Sub
Private Sub Command2_Click()
Timer1.Enabled = False 'кнопка СТОП.Движение тела и отсчёт времени прекращается.
Timer2.Enabled = False
End Sub
Private Sub Form_Load()
Picture1.DrawWidth = 8 'устанавливается толщина линии 8 пикселей
For i = 0 To 360
Picture1.PSet (180 * Cos(i) + 200, 100 * Sin(i) + 140) 'при помощи метода PSet рисуется эллипс
Next
Shape1.Left = -20 'координаты объекта при загрузке формы,таковы,что объект отсутствует на форме
Shape1.Top = -20
fi = 0
Picture1.PSet (380, 240) 'точки на осях x и y,единичный отрезок
Picture1.PSet (20, 40)
End Sub
Private Sub Timer1_Timer()
If Not Timer2.Enabled Then Timer2.Enabled = True
x = 45 * 4 * Cos(fi) + 48 * 4 'траектория движения тела, координаиа Х
y = 25 * 4 * Sin(fi) + 33 * 4 'Y
Shape1.Left = x
Shape1.Top = y
LabelV.Caption = Round(v, 3) 'вывод значения скорости в метку,точность до тысячных
LabelX.Caption = x 'вывод координат в метки
LabelY.Caption = y
LabelK.Caption = Int(fi / 6.28) 'количество кругов
LabelS.Caption = Round(223.112 / 6.28 * fi) 'пройденный путь
fi = fi + (Slider1.Value / 2) * 3.1415 / 180 'закон изменения угла разбиения
End Sub
Private Sub Timer2_Timer()
LabelTime.Caption = LabelTime.Caption + 0.1 'время
v = (Sqr((x2 - x) ^ 2 + (y2 - y) ^ 2)) / (Timer2.Interval) * 1000 'скорость
x2 = x
y2 = y
End Sub
5. Контрольный пример
6. Инструкция пользователя
Данная программа является графической визуализацией движения объекта по эллиптическому маршруту, с регулируемой скоростью.
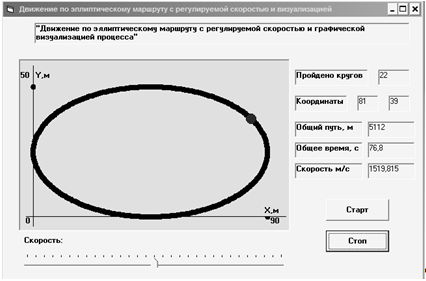
Запустите файл ”Project1.exe”. На экране появится форма, большую её часть занимает рамка с изображением прямоугольной системы координат и изображённого в ней эллипса. При нажатии на кнопку «Старт», появляется объект в виде небольшого круга, движущегося по траектории, обозначенной эллипсом. В окошках, расположенных на форме слева указываются параметры движения тела: координаты, количество полных пройденных кругов, общий пройденный путь и скорость. Скорость тела регулируется с помощью бегунка, расположенного внизу формы. Процесс движения можно остановить, нажав на кнопку «Стоп», при повторном нажатии на «Старт» тело продолжит движение при этом характеристики движения не обнулятся, и их отсчёт будет продолжен с момента остановки. Для выхода из программы нажмите на кнопку с крестиком в верхнем правом углу окна.
Список использованной литературы
1. А.Г. Паутова. Visual Basic Творческое проектирование. В 3 ч. – М.: Классикс Стиль, 2003. – 128 с.
2. Марченко А.Л. «Введение в программирование»: Учебное пособие. - Московский университет, 2005. – 258 с.
3. Либерти Д. «Программирование на VB»: Пер. с англ. – 2-ое изд.- Сивол-Плюс, 2004. – 688 с.
4. Мультимедийное пособие «Программирование для студентов», Alex Soft.