| Скачать .docx |
Реферат: Управление
Управление
1 Понятие об управлении. Основные принципы управления
В окружающем нас мире повсюду протекают различные процессы управления. В частности, человек в своей практической деятельности постоянно использует различные физические явления, законы природы для достижения определенных целей. При этом он в известной мере управляет силами природы, заставляя их работать в необходимом направлении. Особенно ярко это выражается с появлением техники. Человек управляет различными средствами транспорта, машинами в различных отраслях промышленности, химическими реакциями и различными другими процессами. Процессы управления протекают также в других областях деятельности человека. Так, полководец во время войны управляет боевыми действиями состоящих в его распоряжении войск и боевой техники. Процессы управления непрерывно протекают и в живой природе. В результате этих процессов в живом организме поддерживается практически постоянным ритм сердца и дыхания, температура тела и вообще обеспечивается функционирование всех органов и жизнедеятельность всего организма.
Управление представляет собой такую организацию того или иного процесса, которая обеспечивает достижение определенных целей.
Бурное развитие автоматики, электроники и вычислительной техники в послевоенный период привело к внедрению автоматики буквально во все области деятельности человека. Автоматика и автоматизация становятся главным направлением развития всей техники. Совершается переход от автоматизации отдельных простейших производственных операций к комплексной автоматизации средств производства и производственных процессов. Появляются различные автоматические производственные линии и даже целые автоматические заводы. Решающую роль в развитии автоматики сыграло появление математических машин. Если в прошлом машины предназначались для освобождения человека от тяжелого физического труда, то сейчас наступила эпоха создания машин принципиально нового типа, выполняющих некоторые функции человеческого мозга, в частности осуществляющих управление различными сложными процессами. Роль человека при этом сводится к организации работы автоматических систем и средств вычислительной техники, такому их проектированию, соединению и использованию, которое обеспечивает получение необходимых результатов с наименьшими затратами. Для этого необходима наука о процессах управления и их общих закономерностях, т. е. теория управления.
Чтобы понять основные принципы управления, рассмотрим, например, процесс управления автомобилем. Сидя за рулем, водитель видит перед собой дорогу и находящиеся на ней предметы, наблюдает, куда идет машина, и на основании этого принимает решение, надо ли изменить направление движения машины и если надо, то куда и насколько следует повернуть руль. Анализируя этот процесс, мы видим в нем следующие основные элементы. Во-первых, получение информации о направлении, в котором должна идти машина, т. е. информации о задаче управления. Эту информацию водитель получает при помощи зрения. Во-вторых, получение информации о результатах управления. Водителю недостаточно видеть перед собой дорогу, он должен видеть, куда идет машина. Эту информацию он также получает с помощью зрения. В-третьих, анализ полученной информации и принятие на основе этого анализа решения о необходимых управляющих действиях. Наконец, в-четвертых, исполнение принятого решения. Эти четыре элемента составляют основу всякого управления. Если исключить хотя бы один из них, то управление автомобилем станет невозможным. Например, если завязать водителю глаза или вывести из строя его мозг или руки, то управление станет невозможным.
Рассмотренный пример показывает, что в общем случае процесс управления состоит из следующих четырех элементов: получение информации о задачах управления, получение информации о результатах управления, т. е. о поведении объекта управления, анализ полученной информации и выработка решения и исполнение решения, т. е. осуществление управляющих действий. В соответствии с этим для организации процесса управления необходимо иметь источники информации о задачах управления и результатах управления, устройства для анализа получаемой информации и выработки решения и исполнительные устройства, осуществляющие, управление объектом.
Из приведенного анализа процесса управления следует, что в организации процесса управления большую, а во многих случаях и решающую роль играет получение информации о результатах управления. При наличии этой информации решение об управляющих действиях существенно зависит от результатов управления. Иными словами, первичный элемент — управляющее действие — зависит от вторичного элемента — вызываемого управляющим действием поведения объекта управления. Получается как бы замкнутый круг: причина, вызывающая изменение состояния объекта управления, ставится в зависимость от того, какой результат она вызывает. Такая связь причины и следствия называется обратной связью. Принцип управления с использованием информации о результатах управления называется принципом обратной связи.
Т. о., кардинальным в процессах управления является принцип обратной связи. Сущность его заключается в том, что для достижения цели управления, поставленной перед процессом, объектом или системой, необходимо не только формирование управляющих воздействий, но и получение достоверной информации о протекании процесса на выходе САУ.
Принцип обратной связи лежит в основе подавляющего большинства процессов управления. В частности, принцип обратной связи лежит в основе почти всей деятельности человека. Так, например, если человек протягивает руку, чтобы взять какой-либо предмет, то он смотрит на предмет и подсознательно непрерывно управляет движением руки, исправляя ошибки направления движения руки к предмету. Чтобы убедиться в этом, достаточно исключить получение информации о результатах управления, завязав человеку глаза, и наблюдать движение его руки при попытке взять предмет.
Однако в некоторых отдельных случаях принцип обратной связи использовать не удается из-за практической невозможности получить информацию о результатах управления. В таких случаях управление сложными процессами становится невозможным. Например, управление автомобилем при отсутствии – информации о том, куда он движется, совершенно невозможно. Однако в некоторых случаях закон изменения состояния объекта управления во времени заранее известен и практически не зависит от результатов управления, а зависит только от управляющих действий. Так, например, при автоматическом управлении токарным станком, изготовляющим детали одного определенного образца, чрезвычайно трудно организовать измерение деталей в процессе обточки, т. е. получение информации о результатах управления. Вследствие этого практически невозможно управлять движением резца с учетом результатов этого управления, т. е. с использованием принципа обратной связи. Однако закон изменения положения резца во времени в процессе обработки различных деталей весьма мало зависит от разброса параметров отдельных заготовок и является практически одним и тем же для всех деталей. Поэтому в данном случае можно задать положение резца как определенную функцию времени и осуществить автоматическое перемещение его по этому закону.
Управление, обеспечивающее заданный закон изменения состояния объекта управления во времени, независимо от результатов управления, называется программным управлением или управлением по разомкнутому циклу. Закон изменения состояния объекта управления во времени при этом называется программой управления. В отличие от управления по разомкнутому циклу, управление с использованием принципа обратной связи называется часто управлением по замкнутому циклу. Область применения программного управления в чистом виде ограничена в основном промышленными автоматами (автоматическими станками). Значительно более широкое распространение нашло такое программное управление, при котором сама программа изменения состояния объекта управления осуществляется с помощью обратной связи. В таких случаях программа управления служит информацией о задачах управления, а состояние объекта управления определяется с помощью измерителей, которые дают информацию о результатах управления и тем самым осуществляют обратную связь. В подобных случаях управление по существу не является программным, а представляет собой управление с обратной связью. Так, например, при управлении ракетой сразу после пуска часто задается определенная программа изменения угла наклона ее продольной оси к горизонту с течением времени. Истинный угол наклона оси ракеты к горизонту измеряется и сравнивается с программным, и на основе этого сравнения вырабатывается сигнал управления. Таким образом, принцип обратной связи является основным принципом управления.
Совокупность всех устройств, обеспечивающих управление каким-либо объектом, называется системой управления. Изложенное показывает, что всякая система управления должна содержать источники информации о задачах управления и результатах управления, устройства, анализирующие информацию и вырабатывающие решение об управляющих действиях, и исполнительные устройства. Некоторыми из этих элементов или всеми сразу, может, в частности, служить человек. Например, водитель автомобиля выполняет сразу функции всех перечисленных элементов. В таких случаях система управления включает человека и не является автоматической.
Если функции всех элементов системы управления выполняются различными устройствами без непосредственного участия человека, то система управления называется автоматической. Примерами автоматических систем управления могут служить автопилот, управляющий полетом самолета, система самонаведения ракеты, следящая система, обеспечивающая автоматическое сопровождение самолета лучом радиолокатора, устройства управления процессом вычислений в электронной цифровой машине и т. д.
В некоторых случаях сложный процесс управления осуществляется человеком или даже группой людей с помощью различных автоматических устройств, выполняющих отдельные операции, необходимые для управления. Такая система управления называется автоматизированной. Примером автоматизированной системы управления может служить система управления войсками, содержащая устройства и вычислительные машины, осуществляющие автоматический сбор и обработку информации и вырабатывающие различные варианты решений и их сравнительные характеристики.
При изучении процесса управления приходится рассматривать совместную работу объекта управления и системы управления и их взаимодействие. Только при этом условии можно изучить процессы управления, основанные на принципе обратной связи. Объект управления вместе с системой управления представляет собой сложную динамическую систему, которую мы будем называть в дальнейшем для краткости автоматической системой.
В некоторых случаях задачей управления является обеспечение постоянства некоторой физической величины. Такой частный вид управления обычно называется регулированием. Автоматическая система управления, обеспечивающая регулирование значения какой-либо физической величины, называется регулятором. Автоматическая система, состоящая из регулируемого объекта и регулятора, называется системой автоматического регулирования. Процессы автоматического регулирования широко распространены в живой природе. Примерами могут служить регулирование ритма сердца, регулирование ритма дыхания, регулирование температуры тела и т.д.
Простейшие автоматические системы управления, а именно системы автоматического регулирования, появились очень давно, по существу вместе с первыми машинами. Первые же попытки создания машин показали, что никакая машина не может нормально функционировать без соответствующих регуляторов. Так например, для нормального функционирования паровой машины оказалось необходимым поддерживать постоянное давление пара в паровом котле и постоянную скорость вращения махового колеса.
В качестве примера простейшего регулятора на рисунке приведен схематический чертеж центробежного регулятора скорости вращения махового колеса паровой машины, который был изобретен в 1784 г. Джемсом Уаттом. Этот регулятор состоит из двух грузов 2 , подвешенных на шарнирах вдоль оси вертикального вала 1 . Рычаги грузов связаны с муфтой 3, которая может перемещаться вдоль вала 1 . Муфта 3 в свою очередь связана рычагом с заслонкой (дросселем) 4, положение которой определяет сечение отверстия, через которое пар поступает из котла в цилиндр паровой машины. При определенной угловой скорости вала 1 грузы 2, муфта 3 и заслонка 4 находятся в определенном положении. Конструкция рычагов и заслонки выбирается таким образом, чтобы при нужной угловой скорости сечение отверстия для прохода пара было таким, чтобы машина вращала вал именно с этой скоростью. Тогда, если скорость вращения вала 1 превысит заданную величину, то центробежная сила грузов увеличится, вследствие чего грузы поднимутся и переместят муфту 3 заслонку 4. При этом подача пара в машину уменьшится, что вызовет уменьшение угловой скорости вала 1 , т. е. приближение ее к заданному значению. Если угловая скорость вала станет меньше заданного значения, то грузы опустятся и переместят заслонку вверх, вследствие чего подача пара в машину увеличится. В этом простейшем регуляторе грузы являются и измерителем отклонения угловой скорости от заданного значения, и исполнительными устройствами, осуществляющими управление заслонкой, а устройства для анализа информации полностью отсутствуют.
Простейшие регуляторы обеспечивают функционирование машин, управляемых человеком, и на протяжении многих десятилетий были достаточны. И лишь с развитием физики и особенно электроники, с развертыванием производства электронных приборов, с появлением быстродействующих математических машин, могущих в течение коротких интервалов времени выполнять сложные математические и логические операции, стало возможным создание сложных систем управления, осуществляющих управление сложными процессами и одновременное управление большим числом объектов.
Соответственно развитию техники и ее возможностей развивалась и теория автоматического управления. Вначале, когда существовали лишь простейшие регуляторы, теория автоматического регулирования была по существу лишь собранием примеров применения методов теории дифференциальных уравнений. Затем стали создаваться специальные методы исследования систем автоматического регулирования, поведение которых описывается дифференциальными уравнениями, и теория автоматического регулирования стала специальной отраслью прикладной теории дифференциальных уравнений. В послевоенный период теория автоматического управления стала бурно развиваться. Новые технические средства, новые задачи управления потребовали новых научных методов, привлечения различных существующих математических методов и разработки новых. В результате сейчас теория автоматического управления развилась в самостоятельную прикладную техническую науку, располагающую своими специфическими эффективными методами исследования автоматических систем, их расчета и проектирования.
Однако как техника, так и теория автоматического управления находится в настоящее время в состоянии интенсивного развития. Поэтому мы сейчас умеем решать пока еще далеко не все задачи теории автоматического управления, которые выдвигает практика и решение которых необходимо для дальнейшего развития автоматики, для создания новых, все более и более сложных автоматических систем управления. В частности, в настоящее время пока еще не разработаны методы исследования процессов управления одновременно большим числом объектов, обладающих известной самостоятельностью действий и свободой поведения. Поэтому мы можем изложить здесь лишь общие методы расчета и исследования автоматических систем и их составных частей и общие принципы решения задач управления.
2 Цель управления в технических системах
Основной принцип управления — принцип отрицательной обратной связи — универсален, но специфика его применения существенно зависит от управляемого процесса, изучение которого является предметом соответствующих наук, ставящих цели управления (например, технических, экономических, биологических, общественных и т. д.).
Необходимо подчеркнуть важность и определяющую роль четкой формулировки цели управления. Нет цели — нет управления! Например, в зависимости от того, какой у предприятия план — по валу или по номенклатуре изделий, будут получены совершенно разные конечные результаты.
Цель управления процессом или объектом — конечный технический или экономический результат, который может быть достигнут системой управления на определенном временном интервале ее нормального функционирования.
Цель управления формулируют не специалисты по управлению, а, например, технологи, инженеры-аэродинамики, экономисты, биологи, т. е. специалисты в той области техники, в которой необходимо применить управление. Основная задача специалистов по управлению состоит в том, чтобы создать систему для сбора информации, необходимой для осуществления цели управления, передачи, представления или преобразования ее в удобную форму, переработки и, наконец, принятия решения о том, как использовать эту информацию, чтобы обеспечить выполнение цели объектом управления. Техническое решение этой задачи связано с применением различных аппаратных и программных средств.
3 Принципы и основы построения систем автоматического регулирования
Теория автоматического регулирования появилась и достигла довольно высокого уровня гораздо раньше, чем теория автоматического управления. Становление и развитие ТАУ потребовало использования современных достижений теории информации, информатики, вычислительной техники.
Однако основные понятия, принципы и методы ТАУ сформировались в ТАР. Поэтому в этом реферате сначала даются основные принципы регулирования САР, потом вводится понятие САУ, а затем рассматривается более сложная проблема — проблема управления.
Рассмотрим ряд технологических процессов, которые характеризуются тем, что в течение продолжительного времени необходимо поддерживать постоянными или изменять по определенному закону некоторые физические величины на выходе соответствующего управляемого объекта (машины, установки, агрегата и т. д.). Эти величины называют регулируемыми переменными (например, частоту вращения вала турбины, температуру и давление на выходе технологической установки, напряжение на клеммах генератора, координаты движущегося объекта и т. д.).
Для технической реализации таких процессов используют специальные устройства, называемые автоматическими регуляторами, которые на основании измерения регулируемых переменных должны оказывать соответствующие управляющие воздействия на объект регулирования.
Целенаправленное изменение поведения объекта во времени может осуществляться по принципу разомкнутого или замкнутого циклов. Рассмотрим два варианта системы автоматического регулирования частоты вращения вала нагруженного электродвигателя (см. рис. 1).

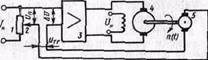
Рис. 1. Схемы САР:
а — система без обратной связи (разомкнутый цикл):
б — с обратной связью (замкнутый цикл)
Система разомкнутого цикла . В системах как разомкнутого (рис. 1, а), так и замкнутого цикла (рис. 1, б ) входным управляющим воздействием является перемещение токосъемного элемента (движка 2) потенциометра 1. Последний преобразует это перемещение в напряжение на входе усилителя 3, что приводит к изменению тока в обмотке якоря электродвигателя 4— исполнительного элемента системы. Это в свою очередь вызовет соответствующее изменение угловой скорости вала электродвигателя (Эдв). При идеальных условиях частота вращения вала в установившемся режиме будет однозначно соответствовать заданной уставке — положению движка потенциометра.
Частоту вращения вала можно контролировать при помощи тахогенератора 5 и вольтметра 6, но результаты этого контроля не используют в процессе регулирования.
Рассмотренная схема не имеет замкнутого пути обхода, т. е. является разомкнутой. Для установления соответствия между входом (положением движка 2) и выходом (частотой вращения) система должна быть тщательно отградуирована. Конкретная градуировочная кривая справедлива только при постоянном значении механической нагрузки на валу электродвигателя. При изменении этой нагрузки градуировка нарушается. Кроме того, при износе и старении элементов системы, при колебаниях температуры и т. д. эта градуировка также нарушается. Поэтому системы, работающие по принципу разомкнутого цикла, не могут обеспечить высокую точность регулирования. В них не измеряется результат, вызываемый управляющим воздействием, т. е. перемещением движка, и не осуществляются действия, влияющие на этот результат, с тем чтобы он соответствовал требуемому.
Система замкнутого цикла, принцип обратной связи. Эта система (см. рис. 1, б ) отличается от системы разомкнутого цикла тем, что выходное напряжение тахогенератора 5 сравнивается с уставкой на входе, т. е. с напряжением U п , которое снимается с потенциометра 1 . Если угловая скорость электродвигателя отличается от заданной, то возникает сигнал ошибки DU = U п – U тг . Усиление сигнала DU по мощности до уровня, необходимого для нормальной работы Эдв, осуществляет усилитель 3. Электродвигатель с встроенным на его валу тахогенератором отрабатывает сигнал ошибки до определенного значения, которое в установившемся режиме и задает частоту вращения вала нагрузки при определенном значении U п . Значение сигнала ошибки тем меньше, чем больше коэффициент усиления усилителя по напряжению.
Отметим, что модуль и знак сигнала ошибки определяют соответственно угловую скорость и направление вращения вала Эдв, т. е. вала механической нагрузки.
Принцип управления, основанный на использовании ООС, характеризуется тем, что не требует градуировки и сохраняет высокую точность и в тех случаях, когда нагрузка и параметры элементов системы со временем изменяют свои значения. В этом заключается основное достоинство систем с обратной связью.
В некоторых случаях оба принципа управления (по разомкнутому и замкнутому циклам) используют в сочетании друг с другом.
В системах с замкнутым циклом или обратной связью точность регулирования, т. е. точность поддержания требуемой функциональной связи (в частности, пропорциональной) между входом и выходом, в основном зависит от точности, с которой проводят измерение и сравнение требуемого и действительного значений регулируемой переменной.
Системой автоматического регулирования называется активная[1] динамическая система, стремящаяся сохранять в допустимых пределах отклонение между требуемым и действительным изменениями регулируемой переменной при помощи их сравнения на основе принципа обратной связи (замкнутого цикла) и использования получающегося при этом сигнала для управления источником энергии.
САР называются системы с обратной связью (ОС). Это объясняется тем, что в них имеется не только прямая связь между входом (входным управляющим воздействием, или управлением) и выходом (регулируемой переменной), но и обратная между выходом и входом, служащая для сравнения этих величин.
Изменения регулируемых величин вызывают не только управляющие, но и возмущающие воздействия, приложенные в соответствующих точках системы автоматического регулирования. Управление осуществляет целенаправленное изменение регулируемых переменных. Возмущение стремится нарушить требуемую функциональную связь между управляющим воздействием и регулируемой переменной. Например, на рис. 1, б возмущающими воздействиями могут быть момент нагрузки M н , приложенный к валу электродвигателя, или изменение напряжения U в в обмотке возбуждения последнего.
САР должна вести себя по отношению к управляющему и возмущающему воздействиям различным образом. Необходимо, чтобы система осуществляла управление с наименьшими погрешностями, компенсируя действие возмущений на регулируемые переменные.
САР с одной регулируемой величиной показана на рис. 2. Цифрой 1 обозначено устройство для сравнения управляющего воздействия с регулируемой переменной; цифрой 2— объект и регулятор. Отметим, что если управляющее воздействие g ( t ) может быть приложено только к сравнивающему устройству системы, то возмущающее воздействие f ( t ) может быть приложено к любой точке САР.
Цепь обратной связи
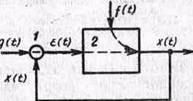
Рис. 2. Схема САР с одной регулируемой переменной
Внешние воздействия на систему приводят к тому, что требуемые и действительные значения регулируемой величины отличаются друг от друга. Разность между необходимым и действительным значением регулируемой величины является ошибкой системы автоматического регулирования.
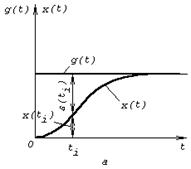
Отклонением регулируемой величины называют разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за номинальное или за начало отсчета (рис. 3, а )
 |

В то время как отклонение х (t ) регулируемой величины при неограниченно возрастающих управляющих воздействиях является также неограниченно возрастающей функцией времени, ошибка e (t ) остается ограниченной (рис. 3, б ). Воздействие, приложенное к сравнивающему элементу системы регулирования, называют входным сигналом, или сигналом на входе системы автоматического регулирования.
При введении отрицательной обратной связи система слабо реагирует на возмущающие воздействия и подчиняется главным образом управляющему воздействию, т. е. замкнутая система регулирования по существу представляет собой фильтр, который достаточно точно воспроизводит управляющее воздействие и подавляет возмущающее.
Сигнал, который поступает с выхода системы на ее вход, называют сигналом главной обратной связи, а разность между входным сигналом и сигналом главной обратной связи — сигналом ошибки.
САР являются системами направленного действия. Это означает, что выходной сигнал последующего элемента может оказать влияние на формирование ошибки на выходе элемента сравнения только через обратную связь.
Итак, САР—это замкнутая активная динамическая система направленного действия, преобразующая уставку на ее входе в регулирующее воздействие, непосредственно прикладываемое к объекту управления.
4 Основные технические требования, предъявляемые к САР
Применение САР в каждом конкретном случае зависит от того, насколько система удовлетворяет предъявляемым к ней техническим требованиям. Основное требование — сохранение заданной функциональной зависимости между управляющими и регулируемыми переменными на входе и выходе системы. Идеальных систем, которые выполняют это требование абсолютно точно, не существует. Поэтому речь может идти только о степени приближения системы к идеальной. Чем больше эта степень, тем сложнее система. При проектировании САР необходимо стремиться к разумному компромиссу между высоким качеством ее работы и простотой технических средств для достижения этого качества.
Требования, предъявляемые к поведению системы в динамике, зависят от ее назначения, характера и конкретных условий работы и т. д. Различают следующие категории технических требований: устойчивость системы (запасы устойчивости системы); значение ошибки в установившемся состоянии (статическая точность); поведение системы в переходном процессе (условия качества); динамическая точность системы (значение ошибки при непрерывно изменяющихся воздействиях).
Проектируя САР, следует учитывать и такие показатели, как расход энергии на управление, экономическая эффективность системы регулирования, стоимость и окупаемость оборудования, надежность и др.
Наиболее существенным из перечисленных требований является устойчивость системы. САР из-за наличия обратных связей склонны к колебаниям. В устойчиво работающей системе колебания с течением времени затухают, и система приходит в согласованное состояние. Устойчивость системы не должна нарушаться при изменении в определенных пределах внешних и внутренних условий (например, окружающей температуры, напряжения питающей сети и т. д.). Запасы устойчивости должны быть такими, чтобы обеспечивалась возможность изменения параметров системы во время ее работы.
Следует отметить, что принцип обратной связи САР, применяемый для подавления колебаний и уменьшения ошибки, при определенных условиях может привести не только к генерации колебаний и увеличению ошибки, но и к аварийным режимам.
В качестве примера рассмотрим автомат курса, реагирующий на отклонение самолета от требуемого направления. Пусть в начальный момент времени под действием возмущающих сил продольная ось самолета не совпадает с требуемым направлением движения. В результате чувствительный элемент автомата курса вырабатывает сигнал, который заставляет отклониться рули направления. При этом возникает вращающий момент, возвращающий самолет на заданный, курс. Однако в момент, когда продольная ось самолета совпадает с требуемым направлением движения, это возвращение не прекратится, во-первых, потому, что самолет имеет значительный момент инерции и при подходе к заданному курсу будет обладать определенным запасом кинетической энергии; во-вторых, потому что автомат курса, обладающий некоторым запаздыванием, возвратит руль в нейтральное положение лишь через некоторый промежуток времени после того, как продольная ось самолета совпадет с заданным курсом. Поэтому самолет будет отклоняться от заданного курса в направлении, противоположном первоначальному, до тех пор, пока автомат курса не произведет перекладку руля и пока не возникнет вращающий момент, достаточный для возвращения самолета к заданному курсу. Если при этом демпфирование самолета невелико, а инерция и запаздывание автомата курса значительны, то амплитуда колебаний самолета относительно заданного курса возрастет и сохранение заданного курса станет невозможным.
Таким образом, устойчивость является необходимой, но недостаточной характеристикой динамических свойств САР в реальных условиях работы при наличии различных воздействий.
Виды типовых воздействий. Поведение САР существенно зависит от величины и характера воздействий на систему. При рассмотрении конкретных условий работы системы оказывается возможным выбрать такой вид воздействий, который для данной системы был бы наиболее типичным или наиболее неблагоприятным. Изучив переходный процесс, вызванный этим видом воздействий, можно судить о динамических свойствах системы.
Так, при анализе динамики САР в качестве типового (тестового) часто выбирают ступенчатое воздействие, или единичный скачок (рис. 4, а). Примерами такого вида воздействий являются уменьшение (сброс) или увеличение нагрузки в системах регулирования угловой скорости электродвигателя, отказ двигателя в системе двухмоторный самолет — автомат курса, внезапное изменение положения задающей оси в следящих системах и т. д.
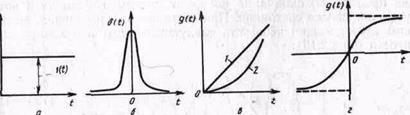
Рис. 4. Виды типовых воздействий
Типовое воздействие может быть в виде d-функции (рис. 4, б ), т. е. иметь форму импульса весьма малой продолжительности по сравнению с ожидаемым временем переходного процесса. В реальных условиях такой вид воздействия имеет место, например, в случае внезапного вхождения самолета в струю воздуха, движущегося перпендикулярно траектории движения самолета. При этом d-функцию можно рассматривать как производную от единичной ступенчатой функции.
При исследовании следящих систем типовым управляющим воздействием является, например,
g(t) = g0 + g1 t+g2 t2 +…+gr tr , t >0 (1)
Частными случаями такого вида воздействий являются:
 (2)
(2)
 (3)
(3)
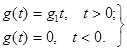
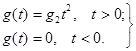
Выражения (2) соответствуют изменению управляющего сигнала с постоянной скоростью (кривая 1, рис. 4, в), а выражение (3) – изменению управляющего сигнала с постоянным ускорением (кривая 2, рис. 4, в). Однако, при исследовании следящих систем управления антенной радиолокационной станции используют функцию g ( t ) = arctgbt , которая отражает собой закон изменения азимутального угла между направлением на цель и некоторым фиксированным направлением в случае прямолинейного и непрерывного движения сопровождаемого объекта (рис. 4, г).
В отдельных случаях типовое воздействие может быть сложной формы, которая определяется экспериментальным путём. Переходные процессы удовлетворяют т.н. первичным показателям качества, когда при единичном ступенчатом воздействии время переходного процесса ![]() , перерегулирование (x
max
– x
0
)/x
0
* 100%, статическое отклонение
, перерегулирование (x
max
– x
0
)/x
0
* 100%, статическое отклонение ![]() , число колебаний
, число колебаний ![]() за время
за время ![]() . Здесь
. Здесь ![]() - заданные величины, а
- заданные величины, а ![]() - установившееся значение регулируемой величины x
(t
).
- установившееся значение регулируемой величины x
(t
).
Переходные процессы. Любое воздействие вызывает в системе процесс, по окончании которого система переходит в новое установившееся состояние. При статическом отклонении, не равном нулю можно выделить следующие типы переходных процессов (рис. 5):
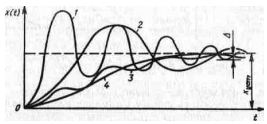
Рис. 5. Основные типы переходных процессов в САР
- колебательные (кривая 1 ), характеризующиеся наличием двух или большего числа перерегулирований;
- малоколебательные (кривая 2 ), характеризующиеся наличием только одного перерегулирования;
- без перерегулирования (кривая 3
), характеризующиеся тем, что значение отклонения регулируемой величины остаётся в переходном процессе меньше установившегося значения, т. е. выполняется условие ![]() при всех t
(с точностью до D);
при всех t
(с точностью до D);
- монотонные (кривая 4 ), характеризующиеся тем, что скорость изменения регулируемой величины не меняет знака в течение переходного процесса, т. е. выполняются условия
![]() ,
,
где ![]() - время переходного процесса.
- время переходного процесса.
В случае воздействий, интенсивность которых неограниченно возрастает с течением времени, отклонение значения регулируемой переменной также неограниченно возрастает. Поэтому будем рассматривать не установившиеся и максимальные значения отклонения, а установившиеся и максимальные ошибки регулируемой переменной от установившегося её значения.
5 Системы автоматического управления. Цель управления
Основная проблема ТАР (см. подразд. «Принципы и основы построения систем автоматического регулирования») в векторной форме ставится так: заданы воздействия на входе системы, т. е. уставки, или управляющие воздействия ![]() , зависящие от технологии процесса. Необходимо их наиболее качественное воспроизведение, т. е. сведение к минимуму функционала от ошибки
, зависящие от технологии процесса. Необходимо их наиболее качественное воспроизведение, т. е. сведение к минимуму функционала от ошибки ![]() между векторами входа и выхода САР:
между векторами входа и выхода САР:
![]() (4)
(4)
Система автоматического управления (САУ) представляет собой совокупность объекта управления и управляющей подсистемы (системы), подчиненных общей цели управления. Однако САУ могут состоять из нескольких объектов, объединенных единством цели управления (рис. 6). В качестве таковых можно рассматривать, например, участок производства, цех завода или даже сам завод.
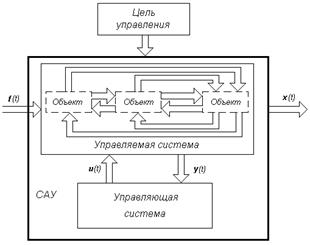
Рис. 6 . Общая функциональная схема САУ
Поведение САУ в процессе нормальной эксплуатации определяется целью управления, внешней средой или внешними условиями, а также внутренними свойствами управляемой и управляющей подсистем.
Система управления называется автоматизированной, если основные функции, необходимые в процессе ее работы для достижения цели управления, осуществляются в ней с участием человека-оператора.
Системы автоматического управления функционируют без непосредственного участия человека. Для того чтобы перейти к рассмотрению проблемы ТАУ и ее отличия от проблемы ТАР, дадим математическое описание САУ.
САУ характеризуется следующими основными переменными, которые являются функциями времени:
- переменные состояния ![]() , представляющие собой обобщенные координаты;
, представляющие собой обобщенные координаты;
- управляющие переменные ![]() , формируемые управляющей системой и представляющие собой воздействия на управляемый объект;
, формируемые управляющей системой и представляющие собой воздействия на управляемый объект;
- внешние переменные или возмущающие воздействия ![]() , создаваемые внешней средой и являющиеся, вообще говоря, случайными переменными;
, создаваемые внешней средой и являющиеся, вообще говоря, случайными переменными;
- наблюдаемые переменные ![]() , представляющие собой те из обобщенных координат
, представляющие собой те из обобщенных координат ![]() управляемой системы, информация об изменении которых поступает на управляющую систему.
управляемой системы, информация об изменении которых поступает на управляющую систему.
Переменные ![]() считают выходными переменными системы управления.
считают выходными переменными системы управления.
Будем рассматривать эти переменные как компоненты многомерных векторных функций (см. рис. 7):
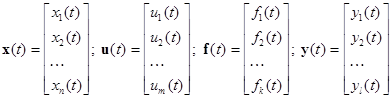
и называть векторы x (t ), u (t ), f (t ), y (t ) векторами состояния, управления, возмущения, наблюдения (выхода) соответственно.
В любой момент времени t
состояние управляемой системы является функцией начального состояния ![]() и векторов
и векторов ![]() , т.е.
, т.е.
![]() (5)
(5)
Векторное уравнение (5) эквивалентно системе из п скалярных уравнений
![]() (6)
(6)
Уравнения (5) и (6) можно рассматривать как математическую модель управляемой системы в общем случае. Для САУ, описываемых дифференциальными уравнениями, уравнения (5) и (6) можно привести к следующему виду:
![]() (7)
(7)
Уравнение (7) — стохастическое векторное уравнение системы, где f (t ) — вектор возмущений и помех, имеющий случайный характер.
Часто на изменение вектора состояния x (t ) (или его производных) и вектора управления и u (t ) накладываются ограничения вида
![]() (8)
(8)
которые означают, что изменения векторов x (t ) и u (t ) должны быть ограничены замкнутыми областями А (t ) и В (t ) векторных пространств состояний и управлений соответственно.
Пусть цель управления как конечный результат функционирования САУ определяется экстремумом некоторого функционала Е , называемого показателем цели управления :
![]() (9)
(9)
Решение задачи управления состоит в том, чтобы найти вектор управления u (t ), обеспечивающий экстремум функционала (9)
![]() (10)
(10)
и одновременно удовлетворяющий ограничениям и связям, налагаемым внутренними (собственными) свойствами системы и внешними возмущениями и помехами.
Так как в правую часть уравнения (7) системы (объекта) входят случайные переменные f (t ), то и процесс изменения вектора состояния x (t ) или вектора выхода y (t ) оказывается случайным.
Таким образом, общей задачей теории управления является управление случайным (стохастическим) процессом. Эта задача в общей постановке представляет собой математически почти непреодолимые трудности. Поэтому решение оптимальной задачи управления (10) обычно основывают на методе последовательных приближений, причем первую и вторую итерации определяют поэтапно:
1) этап первичной оптимизации—состоит в нахождении оптимального вектора управления ![]() без учета влияния возмущающих воздействий и помех, характеризуемых вектором f
(t
). Экстремальная задача решается в упрощенной детерминированной постановке, учитывающей лишь основные свойства системы, т. е. без учета влияния случайных переменных или помех f
(t
);
без учета влияния возмущающих воздействий и помех, характеризуемых вектором f
(t
). Экстремальная задача решается в упрощенной детерминированной постановке, учитывающей лишь основные свойства системы, т. е. без учета влияния случайных переменных или помех f
(t
);
2) этап вторичной оптимизации, или оптимизации качества управления, — состоит в определении минимума функционала (называемого показателем качества САУ)
![]() (11)
(11)
где Е о — экстремум показателя цели управления, вычисленный согласно этапу первичной оптимизации; Е дейст — действительный показатель цели управления, учитывающий влияние внешних возмущений и помех.
Из сравнения следует, что функционал (4) является частным случаем общего функционала (11).
Поясним, почему проблема ТАУ более общая и сложная, чем проблема ТАР.
Во-первых, необходимо сформировать управляющее воздействие или вектор u
(t
) на основании цели управления Е
объектом, представляющей собой, в достаточно общем случае, конечный технический или экономический результат, который может быть достигнут САУ на определенном временном интервале ее функционирования. Функционал ![]() , характеризующий цель управления, может представлять собой сложную функцию, которую трудно формализовать (представить в аналитической форме), так как этот функционал зависит, например, от эффективности, производительности, прибыли, стоимости, вероятности выполнения некоторого события и т. д. Кроме того, решение задачи затруднено ввиду значительной неопределенности при описании модели объекта, требуемых ограничений, случайного характера приложенных к нему возмущений и помех и т. д. Очевидно, что цель управления гораздо сложнее, чем цель регулирования, которая состоит лишь в нахождении минимума функционала от ошибки между входом и выходом согласно (4).
, характеризующий цель управления, может представлять собой сложную функцию, которую трудно формализовать (представить в аналитической форме), так как этот функционал зависит, например, от эффективности, производительности, прибыли, стоимости, вероятности выполнения некоторого события и т. д. Кроме того, решение задачи затруднено ввиду значительной неопределенности при описании модели объекта, требуемых ограничений, случайного характера приложенных к нему возмущений и помех и т. д. Очевидно, что цель управления гораздо сложнее, чем цель регулирования, которая состоит лишь в нахождении минимума функционала от ошибки между входом и выходом согласно (4).
Во-вторых, сложность проблемы управления состоит в аналитическом решении задачи определения оптимального значения ![]() , придающего экстремум функционалу цели управления Е
о
. Кроме того, необходимо усилить управляющий сигнал до уровня, достаточного для воздействия на объект управления т. е. решить собственно задачу регулирования, так как технически управляющий сигнал обычно формируется при помощи ЭВМ на низком уровне мощности.
, придающего экстремум функционалу цели управления Е
о
. Кроме того, необходимо усилить управляющий сигнал до уровня, достаточного для воздействия на объект управления т. е. решить собственно задачу регулирования, так как технически управляющий сигнал обычно формируется при помощи ЭВМ на низком уровне мощности.
Таким образом, необходимо сформировать показатель качества управления в виде функционала (11)
![]() (12)
(12)
и решить эту задачу уже в стохастической постановке.
Один из вариантов решения проблемы управления приведен рис. 7, где ![]() —случайные воздействия.
—случайные воздействия.
Итак, поставлена проблема, которая сводится к решению задачи двух зависимых друг от друга функционалов (11) и (12), между тем как в математике не существует регулярных средств для решения задач такого рода.
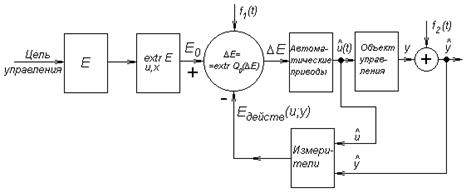
Рис. 7. Вариант построения САУ
6 Проблема управления
Стремление обеспечить минимум функционала ошибкиQ 0 , характеризующей качество управления, обычно вступает в противоречие с условиями технической реализуемости, зависящей от сложности системы, ее стоимости, надежности и т. д. Действительно, чем выше качество управления, т. е. чем выше точность аппроксимации оптимального алгоритма управления, тем сложнее, дороже и ненадежнее управляющая система.
Проблема управления является даже не двух-, а многокритериальной задачей, что обеспечивает наивыгоднейшие условия компромисса между противоречивыми условиями качества и реализуемости управления. Вопросы проектирования САУ здесь не рассматриваются.
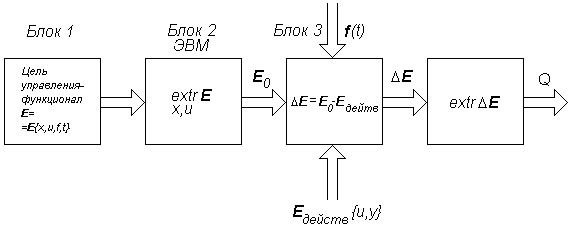
Рис. 8. Схема проблемы управления
Проблема управления может быть пояснена схемой, показанной на рис. 8. Цель управления задается функционалом Е 0 (блок 1) ; в блоке 2, представляющем собой ЭВМ, определяется экстремум функционала
![]() (13)
(13)
в блоке 3 осуществляется сравнение оптимального значения Е 0 с его действительным значением Е действ при использовании функционалов (12) и (13) и вычислении на ЭВМ:
![]() .
.
ФункционалQ 0 определяет качество управления при наличии случайных возмущающих воздействий.
Реализация управления по этому принципу представляет собой большие технические трудности. Одна из наиболее существенных—необходимость формирования ошибки ![]() по показателю цели управления Е
0
.
по показателю цели управления Е
0
.
Действительно, определение АЕ требует измерения всех переменных величин, от которых зависит результат и которые входят в выражение для цели управления E (t ). Большинство из них не может быть оперативно определено в ходе процесса управления (либо из-за недостатка измерительных устройств, либо из-за того, что вычисление этих переменных может быть выполнено лишь за большой промежуток времени). Поэтому задача управления в изложенной ранее постановке заменяется более простой задачей, когда показатель качества управления
![]()
не зависит явно от ошибки в показателе цели управления Q(![]() ). В этом случае необходимость формирования сигнала об ошибке
). В этом случае необходимость формирования сигнала об ошибке![]() отпадает и задача значительно упрощается. Таким показателем может служить точность управления, определяемая следующим образом. Рассмотрим вектор ошибки
отпадает и задача значительно упрощается. Таким показателем может служить точность управления, определяемая следующим образом. Рассмотрим вектор ошибки
![]() (14)
(14)
или
![]()
где ![]() ,
, ![]() —оптимальные векторы состояния и выходной переменной соответственно (получены на основании первичной оптимизации функционала Е
, определяющего цель управления).
—оптимальные векторы состояния и выходной переменной соответственно (получены на основании первичной оптимизации функционала Е
, определяющего цель управления).
Вектор состояния х (t ) можно найти по результатам наблюдения илипо данным измерения вектора наблюдения (см. рис. 16). Тогда этап вторичной оптимизации (собственно задача регулирования) не требует вычисления показателя цели управления E (t ) и сводится к определению оптимального управляющего воздействия
![]() ,
,
где ![]() —
оценка вектора состояния;k
—некоторый переменный коэффициент.
—
оценка вектора состояния;k
—некоторый переменный коэффициент.
Другими словами, необходимо получить корректирующее воздействие
![]() ,
,
которое компенсирует все случайные возмущения, вызывающие отклонения от оптимального режима ![]() или от траектории объекта, вычисленной согласно первичной оптимизации, пренебрегающей этим возмущением.
или от траектории объекта, вычисленной согласно первичной оптимизации, пренебрегающей этим возмущением.
На рис. 9 показана возможная схема адаптивной (приспосабливающейся) системы управления, в которой экстремум цели управления Е (t ) модифицируется под влиянием наблюдения действительных управляющих воздействий u (t ) и вектора состояния х (t ). Эта схема представляет собой двухконтурную систему управления.
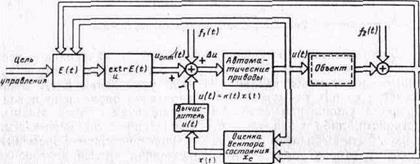
Рис. 9. Адаптивная (приспосабливающаяся) САУ
Конечно, этот косвенный метод решения проблемы управления в принципе менее совершенен, чем метод непосредственного измерения разности между оптимальным показателем цели управления Е 0 и его реальным показателем Е действ согласно алгоритму (1). Но этот алгоритм, как отмечалось ранее, не реализуем в техническом отношении.
Поясним этапы первичной и вторичной оптимизации на примере системы управления самолетом. Этап первичной оптимизации связан с необходимостью получения максимальной точности вывода самолета на оптимальную траекторию при условии минимальной затраты топлива.
Этап вторичной оптимизации, согласно выражению вектора ошибки (14), необходим для достижения заданного конечного состояния в определенный момент (согласно оптимальной траектории, вычисленной на первом этапе оптимизации). Но это—траектория, вдоль которой полет самолета не осуществим из-за различных возмущений, действующих на самолет в полете. Эти возмущения, отклоняющие самолет от оптимальной траектории, необходимо компенсировать.
Отметим, что если бы величину одного из функционалов, например показателя цели управления Е можно было ограничить затратами на энергетику, расходуемыми рулями управления самолетом, то зависимости второго этапа оптимизации от первого не существовало бы и отпала бы проблема одновременной оптимизации двух взаимозависимых функционалов. Но на самом деле функционал Е, а также функционал Q x зависящий от отработки САУ оптимальной траектории и тоже требующий затрат на энергетику, т. е. формирования корректирующего воздействия v (t ), взаимосвязаны.
Список используемой литературы:
1. В. В. Солодовников, В. Н. Плотников, А. В. Яковлев. Теория автоматического управления техническими системами. М.: МГТУ,1993. – 492 с., ил.
2. Основы автоматического управления. Под ред. В. С. Пугачёва
М.: Наука, 1968.
3. П. В. Куропаткин. Теория автоматического управления. М.: «Высшая школа», 1973 г. – 528с., ил.
4. А. А. Ерофеев. Теория автоматического управления. СПб.: Политехника, 1998. – 295 с.: ил.
[1] Активной является САР, содержащая источник (источники) энергии.