| Скачать .docx |
Реферат: Контрольная работа: Исследование характеристик двигателя постоянного тока независимого возбуждения
Задание 1
Исследование статических и динамических характеристик в одномассовой электромеханической системе с двигателем постоянного тока независимого возбуждения
Двигатель постоянного тока независимого возбуждения подключен по схеме, приведенной на рис. 1.
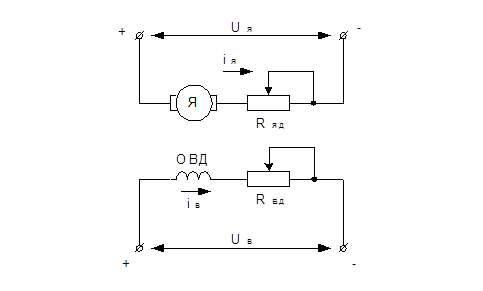
Рис. 1
Вышеприведенная система математически описывается системой дифференциальных уравнений:
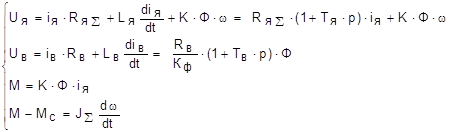
где Uя , Uв , – напряжение на обмотке якоря и возбуждения (ОВД),
iя , iв , – ток якоря и обмотки возбуждения,
R я S , Rв – сопротивление якоря и обмотки возбуждения,
L я , Lв – индуктивность якоря и обмотки возбуждения,
Ф – магнитный поток обмотки возбуждения,
K – конструктивный коэффициент,
М – электромагнитный момент двигателя,
Мс - момент статического сопротивления двигателя,
JS - момент инерции двигателя,
![]()
По приведенным уравнениям составим математическую модель двигателя постоянного тока независимого возбуждения ( рис. 2).
![]()

Рис. 2
Исходные данные для двигателя П 61 мощности PН = 11 кВт:
номинальное напряжение питания Uн =220 В,
номинальная скорость вращения n = 1500 об/мин,
номинальный ток в цепи якоря Iя. н. = 59,5 А,
сопротивление цепи якоря RЯ S = 0,187 Ом,
сопротивление обмотки возбуждения RВ = 133 Ом,
число активных проводников якоря N = 496,
число параллельных ветвей якоря 2a = 2,
число витков полюса обмотки возбуждения wв =1800,
полезный магнитный поток одного полюса Ф = 8,2 мВб,
номинальный ток возбуждения обмотки возбуждения
IВ. Н. = 1,25 А,
максимальная допускаемая частота вращения 2250 об/мин,
момент инерции якоря J1 = 0,56 кг×м2 ,
двигатель двухполюсный 2Pn =2,
масса двигателя Q = 131 кг.
Произведем необходимые расчеты.
1. Угловая скорость
![]()
2. Конструктивный коэффициент двигателя
![]()
3. Постоянная времени цепи возбуждения
![]()
![]()
4. Постоянная времени цепи якоря

5. Коэффициент Кф
![]()
Все полученные данные подставляем в структурную схему (рис. 2) и проведем ее моделирование с помощью программного пакета Matlab. Величины Uя = Uв = Uс подаются на входы схемы ступенчатым воздействием. На выходе снимаем значение скорости вращения двигателя w1 . Динамическая характеристика двигателя (график изменения скорости w1 (t) при номинальных параметрах и Мс =0) изображена на рис. 3. График показывает выход скорости на установившееся значение при включении двигателя.
График изменения скорости КФ(t) приведен на рис. 4.
|
|

Рис. 3 – Переходная характеристика для одномассовой
системы в режиме холостого хода.
Рис. 4 – Процесс изменения КФ(t).
Из графика находим: ![]()
Расчетное значение: ![]()
Как мы видим, расчетное значение значительно отличается от значения, полученного экспериментально при моделировании системы. Это объясняется тем, что расчеты мы выполняли по эмпирическим формулам и не учли все параметры модели. Однако для нас наиболее важно получить качественные характеристики, а не количественные. А это наша модель позволяет сделать.
Статическая характеристика двигателя – это изменение установившейся скорости вращения двигателя w1 при изменении тока якоря Iя (электромеханическая характеристика) или нагрузки Мс (механическая характеристика). Для получения электромеханической характеристики последовательно изменяют Ic =0, Iн А и снимают установившееся значение скорости w1 . По полученным значениям строят график.
Таким образом получают естественную электромеханическую характеристику. Искусственные электромеханические характеристики получают при изменении Uc
, Rя
и Ф. Зависимость w1
от этих величин описывается формулой: ![]() Итак, значение w1
при Ic
=0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение Ic
, которое становится равным Iн
=59,5 А и получаем переходный процесс (см. рис. 5).
Итак, значение w1
при Ic
=0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение Ic
, которое становится равным Iн
=59,5 А и получаем переходный процесс (см. рис. 5).

Рис. 5
Из графика находим:
![]()
Расчетное значение
![]() .
.
Естественная электромеханическая характеристика приведена на рис. 6.

Рис. 6
Для получения механической характеристики последовательно изменяют Мс =0, Мн Н×м и снимают установившееся значение скорости w1 . По полученным значениям строят график. Таким образом получают естественную механическую характеристику. Искусственные механические характеристики получают при изменении Uc , Rя и Ф.
Зависимость w1 от этих величин описывается формулой:
![]() .
.
Итак, значение w1 при Мс =0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение Мс , которое становится равным Мн =КФIн .
![]()
Получаем переходный процесс (см. рис. 7).

Рис. 7
Из графика находим:![]() Расчетное значение
Расчетное значение ![]()
Естественная механическая характеристика приведена на рис. 8.

Перейдем к построению искусственных характеристик.
1. Искусственные электромеханические характеристики при изменении Uя .
|
|
|

Рис. 9
Uя =200В, ωхх =308,97 с-1 , ω=291,78 с-1
Uя =180В, ωхх =278,07 с-1 , ω=260,89 с-1
2. Искусственные электромеханические характеристики при изменении Rя .
|
|
|

Рис. 10
Rя =0,287 Ом, ωхх =339,87 с-1 , ω=313,49 с-1
Rя =0,387 Ом, ωхх =339,87 с-1 , ω=304,297 с-1
3. Искусственные электромеханические характеристики при изменении Ф.
|
|
|

Рис. 11
Ф=0,0182 Вб, ωхх =153,13 с-1 , ω=145,39 с-1
Ф=0,0282 Вб, ωхх =98,83 с-1 , ω=93,83 с-1
4. Искусственные механические характеристики при изменении Uя .
|
|
|

Рис. 12
Uя =200 В, ωхх =308,97 с-1 , ω=291,78 с-1
Uя =180 В, ωхх =278,07 с-1 , ω=162,81 с-1
5. Искусственные механические характеристики при изменении Rя .
|
|
|

Рис. 13
Rя =0,287 Ом, ωхх =339,87 с-1 , ω=313,49 с-1
Rя =0,387 Ом, ωхх =339,87 с-1 , ω=304,3 с-1
6. Искусственные механические характеристики при изменении Ф.
|

Рис. 14
Ф=0,0182 Вб, ωхх =153,13 с-1 , ω=149,66 с-1
Ф=0,0282 Вб, ωхх =98,83 с-1 , ω=97,38 с-1
Выводы: при уменьшении напряжения якоря установившееся значение угловой скорости уменьшается. При увеличении дополнительного сопротивления якоря значение угловой скорости остается прежним при холостом ходе и уменьшается при механических и электрических воздействиях. При увеличении магнитного потока значение угловой скорости уменьшается.
Задание 2
Исследование характеристик двигателя постоянного тока независимого возбуждения в двухмассовой упругой системе
В двухмассовой системе двигатель подключается к нагрузке через упругое звено. Структурная схема такого включения изображена на рис. 15.

Рис. 15 – Структурная схема двухмассовой упругой электромеханической системы
Здесь используются следующие обозначения:
М – электромагнитный момент двигателя,
Мс1 - момент статического сопротивления двигателя,
Мс2 - момент статического сопротивления нагрузки,
М12 - момент сопротивления упругой связи,
С12 – коэффициент жесткости упругой связи,
![]() – скорость вращения вала двигателя,
– скорость вращения вала двигателя,
![]() – скорость вращения рабочего органа,
– скорость вращения рабочего органа,
J1 - момент инерции двигателя,
J2 - момент инерции рабочего органа.
Для случая упругой связи в структурную схему математической модели (рис. 2) необходимо добавить соответствующие элементы. Полученная схема изображена на рис. 16.
С помощью данной схемы смоделируем поведение двухмассовой упругой электромеханической системы с двигателем постоянного тока независимого возбуждения. На входы схемы Мс1
и Мс2
подаем значения Мс1
= Мс2
= 0. Остальные параметры – номинальные. С выхода схемы снимаем переходную характеристику угловой скорости вращения рабочего органа ![]() и вала двигателя
и вала двигателя ![]() .
.
Исследуем переходные процессы ![]() (t) и
(t) и ![]() (t), изменяя моменты инерции двигателя и рабочего органа.
(t), изменяя моменты инерции двигателя и рабочего органа.
![]()

Рис. 16 – Структурная схема для моделирования двухмассовой упругой системы с двигателем постоянного тока независимого возбуждения
Примем j1 -j2 =1°,
тогда коэффициент жесткости
![]()
1. Пусть J1 =J2 =0.56 кг×м2
|

|
2. Примем J1 >J2 (0.84>0.56)

Рис. 18 – Переходные процессы ![]() (t) и
(t) и ![]() (t)
(t)
3. Примем J1<J2 (0.56<0.84)
|
|

Рис. 19 - Переходные процессы ![]() (t) и
(t) и ![]() (t)
(t)
Вывод: при увеличении момента инерции механизма время регулирования уменьшается, а при уменьшении – увеличивается.