| Скачать .docx |
Реферат: Измерения при эксплуатации объектов ракетно-космической техники
Измерения при эксплуатации объектов ракетно-космической техники
1. Измерения при эксплуатации объектов ракетно-космической техники
Измерения, проводимые в процессе летных испытаний и эксплуатации, предназначены для определения и анализа реального функционирования ракет и КА. По результатам измерений и последующей их обработки должно быть принято решение о степени соответствия реальных характеристик ракет и КА заданным на них требованиям, т.е. должно быть принято решение об эффективности эксплуатируемого аппарата.
В процессе полета ракета или КА находится под воздействием реальных сил и моментов сил, обусловленных работой маршевых и управляющих двигателей, влиянием атмосферы, гравитационного и магнитных полей и ряда других факторов. Для объективного суждения о результатах полета и получения от каждого из них возможно большей информации предусматривается выполнение обширной программы измерений.
Поскольку движение ракеты и КА как твердого тела складывается из поступательного движения центра масс и вращательного движения относительно центра масс, в число измеряемых параметров должны быть включены параметры, определяющие эти два движения. К ним относят, например, координаты и составляющие вектора скорости, определяющие положение ЛА в принятой системе координат, углы Эйлера, направляющие косинусы и угловые скорости вращения относительно центра масс.
Для оценки процессов, протекающих на борту аппарата, и воздействия на него внешней среды в состав программы измерений должны быть введены параметры, характеризующие функционирование его бортовых систем и агрегатов, и параметры, определяющие состояние окружающей внешней среды. Это – давление, температура, вибрации, напряжение электрического тока в различных системах объекта; плотность и температура атмосферы, характеристики магнитного и гравитационного полей планеты, характеристики системы жизнеобеспечения состояния космонавтов и т.п.
Все измерения, проводящиеся в процессе полета, в зависимости от типа измерительной аппаратуры и способа передачи сообщений, принято подразделять на внешнетраекторные и радиотелеметрические измерения (рисунок 1).

Внешнетраекторные измерения используются для определения параметров траекторного движения – координат и вектора скорости центра масс и в некоторых случаях для измерения углового положения аппарата относительно принятой системы координат.
Радиотелеметричёские измерения предусматривают получение информации о функционировании различных, систем аппарата и состоянии внешней среды при помощи измерительной аппаратуры, установленной на борту аппарата. Информация по радиоканалу передается в наземную телеметрическую аппаратуру, где регистрируется и подвергается обработке.
Синхронизация всех измерений, проводящихся в процессе полета с большой точностью, осуществляется службой единого времени.
2. Внешнетраекторные измерения
Внешнетраекторные измерения проводятся с целью определения параметров траекторного движения КА или определения относительных траекторий двух или нескольких КА. Аппаратура внешнетраекторных измерений основана, в основном, на радиотехническом и оптическом принципах действия и расположена в пределах Земли на стационарных (на суше), корабельных или самолетных измерительных пунктах.
Оптические измерения основаны на свойстве прямолинейности распространения света в однородной среде и позволяют определить параметры, характеризующие положение и ориентацию аппарата в пространстве. Применяют оптические установки двух основных видов:
с подвижной оптической частью и узким полем зрения объектива;
с неподвижной оптической частью и широким полем зрения объектива.
К первому виду оптических установок относятся кинотеодолиты, кинотелескопы и космические секстанты; ко второму – широкоугольные баллистические камеры или фототеодолиты.
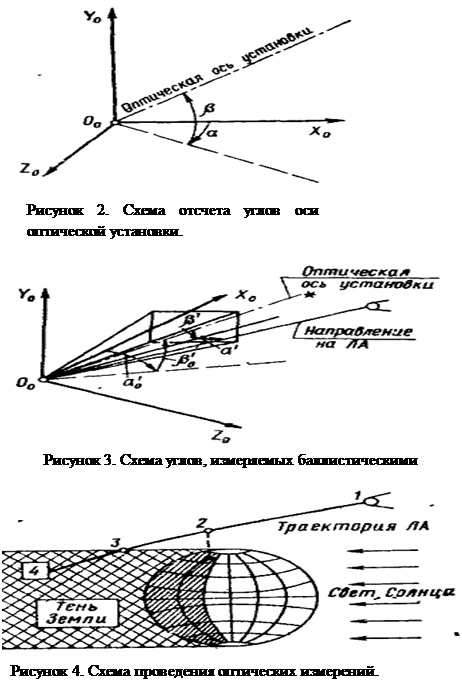
Кинотеодолиты и кинотелескопы представляют собой углоизмерительные средства, предназначенные для визуального слежения за ракетами и КА. В процессе слежения осуществляется непрерывное фотографирование аппарата с регистрацией углов азимута (0 ≤ α ≤ 360о) и места (0 ≤ β ≤ 90°) оптической оси установки (рисунок 2).
Кинотелескопы в отличие от кинотеодолитов имеют большее фокусное расстояние объектива. Это позволяет получить на пленке крупномасштабное изображение ЛА и определить не только его угловое положение, но и в ряде случаев также ориентацию его осей относительно принятой системы координат.
Широкоугольные баллистические камеры имеют неподвижное поле зрения и применяются для точного определения направления на ЛА (углы α' и β') относительно известного и неподвижного в пространстве положения оптической оси объектива камеры (углы α'0 и β'0) (Рисунок 3). Высокая точность измерения углов достигается в этом случае за счет возможности определения положения оптической оси по звездам.
Для измерительной аппаратуры, основанной на оптическом принципе действия, характерна высокая точность и большая наглядность результатов измерений. Однако проведение оптических измерений возможно только при хорошем состоянии атмосферы, что является их значительным недостатком. Оптические измерения параметров движения космических летательных аппаратов и искусственных спутников Земли, как правило, возможны в утренние и вечерние часы, когда в лучах Солнца они становятся заметными на фоне черного неба. Как следует из рисунка 4, спутник на участках орбиты 1–2 и 3–4 невидим для наземных наблюдателей, так как в первом случае он движется на фоне светлого неба, а во втором – находится в тени Земли. Наблюдение за спутником возможно только на участке 2–3, причем качество наблюдений зависит от его размеров, высоты полета в момент наблюдения, широты места, состояния атмосферы и других факторов. По данным американской печати, в мае 1959 г. было проведено фотографирование искусственного спутника «Авангард» диаметром 16,3 см на дальности 4000 км, что свидетельствует о больших возможностях оптических измерений.
Аппаратура внешнетраекторных измерений, основанная на радиотехническом принципе действия, по сравнению с оптической обладает большей дальностью слежения и более универсальна. Используя различные методы радиотехнических измерений, можно определить не только угловое положение аппарата, но также его наклонную дальность, разность или сумму дальностей от двух измерительных пунктов, радиальную скорость и направляющие косинусы вектора скорости в принятой системе координат.
Определение углового положения аппарата сводится к определению направления прихода излучаемых аппаратом или отраженных радиоволн путем сравнения амплитуды, фазы и частоты колебаний, возбуждаемых в антенной системе. Наибольшее применение в радиолокации нашли фазовые и амплитудные методы пеленгования.
Определение дальности в радиотехнических системах сводится к определению временной задержки tD прихода излучаемых или отраженных сигналов, пропорциональной удвоенной дальности D:
![]()
где с – скорость распространения электромагнитных колебаний, равная 3*108 м/с.
В зависимости от вида используемого сигнала оценка временной задержки tD производится измерением фазового, частотного или непосредственно временного сдвига принимаемого сигнала относительно опорного. Широкое практическое применение в аппаратуре внешнетраекторных измерений при измерении дальности нашли фазовый и импульсный (временной) методы.
Измерение скорости движения ЛА основано главным образом на использовании эффекта Доплера.
Таким образом, применение рассмотренных принципов позволяет создавать радиотехническую аппаратуру внешнетраекторных измерений, обладающую большой дальностью действия и высокой потенциальной точностью измеряемых координат. Однако вследствие подверженности радиотехнической аппаратуры влиянию помех ее реальная точность измерения в значительной мере зависит от характера действующих помех. Поэтому при проведении летных испытаний с целью получения большей точности и надежности измерений производят комплексирование радиотехнической и оптической аппаратуры внешнетраекторных измерений.
3. Радиотелеметрические измерения
Радиотелеметрические измерения являются основным источником информации о работе бортовых систем, приборов и агрегатов летательного аппарата, медико-биологическом состоянии экипажа и состоянии окружающей среды.

Большая сложность и стоимость современных ракет и КА обусловили повышенные требования к количеству контролируемых параметров, точности измерений, дальности приема, что привело к существенному усложнению радиотелеметрических систем (РТС).
В настоящее время РТС представляют собой сложный информационно-измерительный комплекс, включающий бортовую и наземные подсистемы, каналы связи, а также специализированные или универсальные ЭВМ, предназначенные для обработки результатов; измерений. Как видно из рисунка 5., радиотелеметрическая система состоит из бортовой измерительно-передающей и наземной приемно-регистрирующей аппаратуры.
При радиотелеметрических измерениях каждая из n измеряемых физических величин через какой-то элемент связи поступает на датчик, представляющий собой информационное устройство, преобразующее контролируемую физическую величину в электрический сигнал, удобный для дальнейшей обработки и передачи по радиолинии. Однотипные электрические сигналы с датчиков поступают на суммирующее и кодирующее устройства, в которых производится объединение сигналов всех датчиков общий суммарный сигнал. При этом сигнал каждого датчика наделяется характерным ему признаком, позволяющим выделить этот сигнал в наземном регистрирующем устройстве. Суммарный сигнал поступает на передающее устройство и излучается в заданном направлении. Излучаемый с борта летательного аппарата сигнал принимается и регистрируется наземной станцией. Принятый антенной наземной станции сигнал передается в приемное устройство, на выходе которого выделяется суммарный сигнал всех датчиков, подобный сигналу на выходе схемы объединения каналов. Этот сигнал поступает на индикаторное устройство, а затем в разделитель каналов, где по характерным для каждого сообщения признакам разбивается на параллельный поток каналов.
С целью последующей обработки и документирования сообщений вся полученная информация записывается на различных видах носителей или передается на централизованный пункт автоматической обработки измерений.
Используемые при испытаниях и эксплуатации ракет и космических аппаратов РТС можно классифицировать по следующим основным признакам.
1. По назначению:
для испытаний и летно-конструкторской отработки новых образцов ракет и КА;
для оперативного контроля и управления полетом ракет и КА в условиях их нормальной эксплуатации.
2. По виду представления телеметрируемых сигналов:
аналоговые;
дискретно-аналоговые;
дискретно-цифровые.
3. По способу разделения каналов:
с временным разделением каналов (ВРК);
с частотным разделением каналов (ЧРК);
с кодовым разделением каналов (КРК);
с комбинированным разделением каналов.
4. По цикличности формирования выборок сигналов с датчиков:
циклические,
ациклические.
5. По виду модуляции первичных сигналов:
амплитудно-импульсная модуляция (АИМ);
широтно-импульсная модуляция (ШИМ);
фазово-импульсная модуляция (ФИМ);
амплитудная модуляция (AM);
фазовая модуляция (ФМ);
частотно-импульсная модуляция (ЧИМ).
6. По виду модуляции несущих колебаний:
амплитудная модуляция (AM);
частотная модуляция (ЧМ);
фазовая модуляция (ФМ).
Под модуляцией в общем случае можно понимать изменение по времени по какому-то определенному закону, какого-то параметра или характеристики сигнала или процесса.
В электротехнике и радиотехнике, которые имеют дело с различным видами электрических сигналов, сложилась вполне определенная терминология, описывающая характер изменения во времени основного сигнала называемого несущей:
постоянный сигнал Z(t)=Xm;
гармонический сигнал Z(t)=Xm·cos (ω0t+φ).
Периодическая последовательность импульсов характеризуемая их амплитудой Xm, длительностью τm, периодом повторения Тm.
Первый из этих сигналов характеризуется только одним параметром – амплитудой, который в данном случае только и можно изменять.
Второй характеризуется тремя параметрами: амплитудой, фазой и частотой (или периодом). То же самое касается и третьего вида сигнала. Именно эти параметры и представляют широкие возможности для управления ими. Особенно это касается импульсной несущей, где можно менять: амплитуду импульсов, их фазу, частоту повторения, длительность импульсов и пауз, число импульсов в пакете и комбинацию импульсов и пауз, что собственно и представляет собой код. В соответствии с видом основного сигнала различают следующие виды его модуляции:
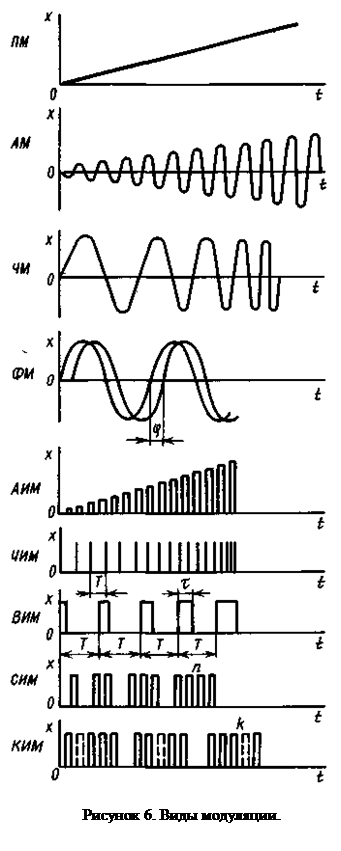
ПМ – прямая модуляция, изменяющая единственный параметр постоянного сигнала;
АМ – амплитудная модуляция;
ЧМ – частотная модуляция;
ФМ – фазовая модуляция, для гармонического сигнала обозначающая воздействие на его соответствующий параметр;
АИМ – амплитудно-импульсная модуляция;
ЧИМ – частотно-импульсная модуляция;
ВИМ – время импульсная модуляция;
ШИМ – широтно-импульсная модуляция;
ФИМ – фазоимпульсная модуляция;
СИМ – счетно-импульсная модуляция;
КИМ – кодоимпульсная модуляция.
Они также обеспечиваются воздействием на соответствующий параметр периодической последовательности импульсов, которая является несущей.
На рисунке 6. приведены сигналы, различающиеся видами модуляции для случая равномерного возрастания значения отображаемой величины X(t). Как видно, счетно-импульсная (СИМ) и кодоимпульсная (КИМ) модуляции связаны с квантованием по уровню значений непрерывной величины X. АИМ, ВИМ, ФИМ и ШИМ приводят к дискретности отсчетов во времени. Другие виды модуляции сохраняют непрерывную структуру информации.
Амплитудно-импульсная модуляция имеет две разновидности:
АИМ – 1, при которой амплитуда в пределах одного импульса повторяет форму модулирующего сигнала (рисунок 7.а);
АИМ – 2, при которой амплитуда в пределах одного импульса не изменяется и равна значению модулирующего сигнала в момент, соответствующий началу импульса (рисунок 7.б).
В рассмотренных выше примерах, огибающая представляет собой монотонно возрастающую непрерывную функцию. В случае воздействия модулирующего сигнала описываемого более сложной функцией, естественно усложняется и вид результирующей характеристики управляемого процесса. Иногда так, что графически этот процесс достаточно сложно изобразить. Тогда на помощь приходит математика т. к. описать математически можно практически любой процесс управления или модуляции.
Кодирование (от французского сode – свод правил, код, шифр) – операция отождествления символов или групп символов одного кода (например, условная система знаков для представления информации в ЭВМ) с символами или группами символов другого кода. Необходимость кодирования возникает, прежде всего, из потребности адаптировать форму сообщения к конкретному каналу связи или какому-либо другому устройству, предназначенному для преобразования или хранения информации. Закон, по которому осуществляется это преобразование, называется кодом. Если код связывает бесконечные во времени последовательности, то он называется непрерывным; если код связывает последовательности только на длине некоторого блока, то он называется блочным.
Кодирование используется:
для исключения ошибок, возникающих при передаче, обработке или хранении информации (в т. ч. для исправления ошибок),
уменьшения избыточности информации (т. н. «информационное сжатие»),
засекречивания передаваемой информации,
преобразования алфавита кода и т.д.
Коды, исправляющие ошибки, при применении их в спутниковых и космических системах связи, позволяют:
понижать выходную вероятность ошибки,
уменьшать размеры приёмных и передающих антенн,
понижать мощность передатчика,
повышать пропускную способность системы.
В целом положительный эффект от их применения оценивается энергетическим выигрышем за счёт кодирования. «Сжатие» информации также позволяет повышать пропускную способность линии связи. При использовании кодирования в процессе приёма возникает необходимость в выделения из получаемого сигнала исходной информации. Это достигается при помощи декодирования, которое можно осуществлять как операцию, обратную кодированию, так и операцию, исключающую действие канала на информацию. Устройство, производящее операции кодирования и декодирования, называется кодеком.
7. По точности измерения телеметрируемых величин:
высокоточные (погрешность измерения 1%);
низкоточные (погрешность измерения 1%).
8. По эффективности:
малой,
средней,
большой.
Под эффективностью W понимается произведение числа каналов n на среднюю максимальную частоту спектра сообщения, т.е.
![]()
где  Fi, max – максимальная частота спектра сообщения i-гo измерения.
Fi, max – максимальная частота спектра сообщения i-гo измерения.
Системы малой эффективности (W = 300…600) используются для передачи небольшого числа (n = 30…40) медленно изменяющихся сообщений со средней максимальной частотой, не превышающей Fmax = 10…15Гц. В этом случае обычно используются системы с временным разделением каналов.
Системы средней эффективности (W = 9000) обычно используют частотные методы разделения каналов и предназначаются для передачи малого числа широкополосных каналов (n =15…18, Fmax = 300… 500Гц).
Системы большой эффективности (W = 200000…300000) предназначаются для передачи количества сообщений, приблизительно 200, с широким спектром Fmax = 500…1000Гц. Для разделения каналов здесь применяют главным образом комбинированные методы.
Получившие широкое распространение системы с ВРК классифицируют по пропускной способности (информативности). Под информативностью понимается либо количество замеров в секунду J1 = nFo, либо количество двоичных единиц в секунду J2 = F0nN, где N – среднее количество двоичных разрядов на одно измерение. Число N связано с точностью δ соотношением N = – [log δ], здесь δ измеряется в долях единицы, а знак выражения в квадратных скобках обозначает округление до ближайшего сверху целого числа. Например, если δ = 3% = 0,03 (N = 5), n = 100, Fo = 100, то информативность J2 = 50000 дв. ед/с.
Выбор типа и принципов построения РТС зависит от ее назначения и требуемой точности измерения телеметрируемых параметров. При испытаниях новых образцов ЛА телеметрические комплексы должны обеспечивать регистрацию с высокой точностью (до 0,1%) большого количества параметров, характеризующих функционирование многих систем, узлов и агрегатов ЛА. Так, например, при испытаниях ракетно-космической системы, предназначенной для доставки пилотируемого КА на Луну с последующим возвращением на Землю, потребовалось одновременные измерения до полутора – двух тысяч параметров с частотой измерения до 1000 Гц.