| Скачать .docx |
Реферат: Шпаргалки по электротехнике
Билет №1
1. Асинхронный электродвигатель. Конструкция, принцип действия, классификация, обозначение двигателей серии 4А и АИ.
Неподвижная часть машины называется статором, а подвижная - ротором. Сердечники статора и ротора АМ собираются из листов эл-тех стали, которые до сборки покрывают с обеих сторон масляно-канифольным изоляционным лаком. Сердечник статора закрепляется в корпусе, а сердечник ротора - на валу (машины малой и средней мощности) или на ободе с крестовиной и втулкой, надетой на вал. Вал ротора вращается в подшипниках, которые помещаются в подшипниковых щитах, прикрепляемых к корпусу статора машины или на отдельно стоящих стойках. На внутренней цилиндрической поверхности статора и на внешней цилиндрической же поверхности ротора имеются пазы, в которых размещаются проводники обмоток статора и ротора. Обмотка статора выполняется обычно трехфазной, присоединяется к сети трехфазного тока и называется поэтому первичной. Обмотка ротора тоже м.б выполнена трехфазной. Концы фаз такой обмотки ротора соединяются обычно в звезду, а начала с помощью контактных колец и металлографитных щеток выводятся наружу. Такая машина называется машиной с фазным ротором. К контактным кольцам обычно присоединяется трехфазный пусковой реостат. Фазная обмотка выполняется с тем же числом полюсов магнитного поля, как и статор. Другая разновидность обмотки ротора - обмотка в виде беличьей клетки. При этом в каждом пазу находится медный или алюминиевый стержень и концы всех стержней с обоих торцов ротора с медным или ал.кольцами, которые замыкают стержни накоротко. Стержни от сердечника обычно не изолируются. Такая машина называется машиной с коротко замкнутым ротором. Воздушный зазор между статором и ротором в АМ выполняется минимально возможным по условиям производства и надежности работы и тем больше, чем крупнее машины (0.4-0.5 мм). АМ охлаждаются воздухом. Принцип действия АМ. Магнитный поток поля статора пересекает проводники замкнутой обмотки ротора и наводит в них ЭДС которое создает ток I2. этот ток взаимодействует с магнитным полем статора и созд-ет вращающий момент М который и заставляет вращаться ротор в направлении вращения поля статора с угловой частотой w. Разницу между угловыми скоростями или частотами вращения поля статора и ротора принято оценивать величиной скольжения s=(w0-w)/w0=(n0-n)/n*100%. Т.к условием возникновения тока в роторе яв-ся неравенство n0≠n т.е ротор не может вращаться с синхронной скоростью поэтому данная машина получила название асинхронная учитывая что номинал скольжение от 1до 10% под нагрузкой, а при холостом ходе стремится к 0 то можно отметить что в режиме работы АД частота вращения находится в пределах 0<n<n0 или можно записать 1>s>0. когда n>n0 –тодвигат режим, n0>n-генерат-ый режим работы АД, n навстречу n0-то электр мпгн торможение. В 70х годах была разработана и внедрена единая серия АД серии 4А. Одновременно с конструкцией двигателя разрабат сталь, провода, изоляция и технология. В 80х годах вышли машины серии АИ, которые отлич-сь повышенной надежностью и перегрузочной способностью, расширенным диапазоном регулирования, лучшими габаритными и энергетическими показателями чем АД серии 4А. 2. Реакция якоря в машинах постоянного тока. В процессе работы двигателя обмотки возбуждения и якоря создают магнитные поля. Результирующее магнитное поле двигателя можно рассматривать как сумму двух магнитных полей. При идеал хх, когда ток якоря Iа=0, в двигателе действует только МДС обмотки возбуждения Fв, которая создает магнитное поле, симметрично распределенное относительно оси полюсов. График распределения магнитной индукции в зазоре Bδ представляет собой трапециидальную кривую рис 1
![]()
![]() Если двигатель нагрузить то по обмотке якоря потечет ток и появится МДС якоря Fа вектор которого неподвижен и направлен перпендикулярно оси полюсов. МДС создает
Если двигатель нагрузить то по обмотке якоря потечет ток и появится МДС якоря Fа вектор которого неподвижен и направлен перпендикулярно оси полюсов. МДС создает
магнитное поле якоря рис2
![]() Если щетки двигателя расположены на геометрич нейтрали nn’ то вектор Fа направлен по геометрич нейтрале т.е по поперечной оси двигателя. На рис3 показан также граёфик распределения магнитной индукции поля якоря в зазоре.
Если щетки двигателя расположены на геометрич нейтрали nn’ то вектор Fа направлен по геометрич нейтрале т.е по поперечной оси двигателя. На рис3 показан также граёфик распределения магнитной индукции поля якоря в зазоре.
![]() Сердечник якоря намагничивается и его участки расположенные по геометрической нейтрале приобретают полярность Na и Sa. Воздействие магнитного поля якоря на основное поле машины называют реакцией якоря. Результирующее поле генератора отличается от основного за
Сердечник якоря намагничивается и его участки расположенные по геометрической нейтрале приобретают полярность Na и Sa. Воздействие магнитного поля якоря на основное поле машины называют реакцией якоря. Результирующее поле генератора отличается от основного за
счет действия поля реакции якоря. Из сравнение рис1 и рис3 следует что реакция якоря искажает магнитное поле двигателя. Физическая нейтраль рез-го маг поля смещается на угол альфа относит нейтрали nn’ Искажение магнитного поля двигателя приводит к тому что одни края полюсных наконечников и располож-е под ними зубцы якоря подмагничиваются, а другие размагничиваются. Влияние реакции якоря на результир-ий магнитный поток зависит также от положения щеток. Когда щетки находятся на геометр. нейтрали МДС якоря Fa направлена по поперечной оси и в двигателе имеет место поперечная реакция якоря. Если щетки сместить с геометрич. нейтрали против направл-я вращения якоря, размагнич-ее действие реакции якоря усилится. Вредное влияние реакции якоря в двиг-лях постоянного тока заключается в след: умен-ся основной магнитный поток Ф что может привести к нарушению устойчивой работы двигателя за счет роста частоты вращения якоря при увел-ии нагрузки. Искажается результ-ее магнитное поле двигателя, что вызывает появление на геометр нейтрали магнитной индукции Вк и может вызвать нарушение работы щеточного контакта и привести к недопустимому искрению на коллекторе, повышается напряжение между смежными коллекторными пластинами что может привести к появлению “ кругового огня”.
Билет №2
1. Трансформатор. Конструкция, принцип действия, классификация, обозначение.
Def это электромагнитный статический преобразователь электроэнергии. Основное назначение трансформатора изменять напряжение переменного тока, но может применяться как числа фаз. Наиболее применяются силовые трансформаторы. Работа тран-ра осн-на на явл ЭМИ в тран-ре. ЭДС в обмотках индуцируется пульсирующим магнитным потоком по закону Ленца: е=-dψ/dt, ψ=ωФ. ЭДС наведенная в контуре по з-ну Ленца пропорционально скорости изменения магнитного потока: е=- ωdФ/dt. Но с другой стороны ψ=Li => е= -Ldi/dt – это выр-е применимо только если в катушке отсутствует феромагнитный сердечник. Простейший трансформатор имеет как минимум 2 обмотки
 |
Обмотка к которой подвод-ся эл энергия U источника назыв 1-ой. Обмотка от которой энергия отвод-ся к приемнику назыв 2-ой. Магнитопровод в тран-ре служит для усиления магнитной связи между обмотками и яв-ся также основанием для крепления и установки обмоток. По констр-ии магн-од бывает:
Трансформаторы малой мощности часто имеют броневую конструкцию. Они собираются из стали Ш – образной формы. Сборка магнитопровода бывает: в стык, в нахлест. В нахлест – более хорошие магн-ые хар-ки но усложняется сборка и разборка. Форма поперечного сечения магнитопровода зависит от мощности трансформатора. При малой мощности – прямоугольная форма. Для тран-ра большой мощности в магнитопроводе выполн-ся вентиляционные каналы. Магнитопровод изготовл спец. стали ( катаная или текстурованная). У этой стали в направлении прокатки улучшены магнит. характ-ки. Обмотки транфор-ра бывают цилиндрические, дисковые. У дисковой обмотки снижаются потери на магн. рассеивания но затраты по изготовл. возрастает. Особое влияние при изготовл. тран-ра удел-ся изоляции и охлаждению. Изоляция бывает главная (изоляция между стержнем и обмоткой и между обмотками), продольная (между слоями одной и той же обмотки). Охлаждение бывает воздушное или масляное. В зависимости от кол-ва обмоток тран-ра бывают: 2-х обмоточные, 3-х обмоточные, много обмоточеные. Трансформаторы бывают понижающие и повышающие. Транс-ры бывают: силовые, трансформаторы спец. наз-я ( сварочные), измерительные ( тока, напр-я), испытательные ( для получ-я высоких и свер высоких напр), разнотрансфор-ые ( для устр-в техники и автоматики). Так же классифиц. по числу фаз: о-однофаз тр, Т-3-х фазный тр, С-сухой тр, Н – с рег напр-ем, У- герметезир тр, М- масленый тр. Sн- ном. мощ тр-ра.
2. Коммутация в машинах постоянного тока.
Работа машины постоянного тока может сопровождаться
искрением между краями щеток и коллекторными пластинами,
когда возникает местный искровой разряд. При интенсивном искрении поверхность коллектора и щеток разрушается,
увеличивается переходное сопротивление скользящего контакта и нагрев коллектора. Искрение снижает надежность машины
постоянного тока и создает помехи радиоустройствам. Однако искрение не неизбежно. Оно вызывается либо
неудовлетворительным состоянием щеточно-коллекторного узла, либо неудовлетворительным процессом коммутации.
Сущность искрения – возникновение искрового разряда при размыкании цепи постоянного тока, обладающей индуктивностью. Прерывание тока вызывает резкое повышение напряжения
uL =L*di/dt в месте размыкания, пробой воздушного слоя с
образованием электрической искры. Чаще причиной искрения является неудовлетворительная коммутация. Коммутацией
называется процесс переключения секций обмотки якоря из одной
параллельной ветви в другую. Этот процесс совершается быстро и непрерывно, причем коммутируемые секции, проходя
геометрические нейтрали, замыкаются щеткой накоротко, а затем размыкаются. При х.х., когда тока в якоре нет, коммутируемой
секции э.д.с. не наводится, и тока в ней не возникает. При нагрузке ток в проводниках якоря создает магнитное поле якоря.
Магнитная ось Na -Sa этого поля проходит через геометрические нейтрали. Коммутируемая секция оказывается в интенсивном магнитном поле Ba якоря и в ней наводится э.д.с. ea =Ba *l*u.
Каждая секция обладает активным сопротивлением Rc (включающем и сопротивление щетки) и индуктивностью Lc . При замыкании
щеткой секции э.д.с. ea вызывает в ней ток секции ik =ea /Rc , который затем при размыкании прерывается. Обрыв тока, сопровождается искровым разрядом. Он возникает при отрыве каждой
последующей пластины коллектора от щетки, что воспринимается
как непрерывное искрение с характерным треском. Чем больше
ток якоря, скорость движения его проводников и число витков в
секци (Lc ~wc 2 ), тем больше э.д.с. ea , ток ik и тем сильнее искрение.
Искрение можно значительно ослабить. Для этого в зоне коммутируемых секций нужно скомпенсировать поле якоря (и э.д.с. ec ) полем добавочных полюсов. Это узкие полюсы, расположенные между основными полюсами на геометрических нейтралях. Катушки добавочных полюсов включены в цепь якоря последовательно так, что их магнитный поток направлен навстречу потоку якоря. Все машины постоянного тока с мощностью от 1 кВт и выше имеют добавочные полюсы.
Однако безыскровая работа машины обеспечивается лишь при условиях, не выходящих за номинальные. При чрезмерных токах якоря (более 3*Iном) добавочные полюсы насыщаются и компенсация поля нарушается. Поэтому большие перегрузки, даже кратковременные, а также значительные превышения скорости могут вызвать искрение, опасное для коллектора.
Билет №3
1.Однофазные асинхронные двигатели.
это обычные двигатели небольшой мощности, широко при меняемые в устройствах автоматики и различных бытовых приборах. По конструкции они почти не отличаются от трехфазных асинхронных двигателей с короткозамкнутым ротором. Различие состоит в том, что на сердечнике статора однофазного двигателя уложена однофазная обмотка занимающая 2/3 пазов сердечника. При включении однофазной обмотки статора С1—С2 в сеть (рис.1)
![]() переменный ток, проходя по обмотке, создает пульсирующий магнитный поток, неподвижный в пространстве, но изменяющийся от +Фmax до —Фмах. Для объяснения принципа действия однофазного асинхронного двигателя воспользуемся графическим методом разложения пульсирующего магнитного
переменный ток, проходя по обмотке, создает пульсирующий магнитный поток, неподвижный в пространстве, но изменяющийся от +Фmax до —Фмах. Для объяснения принципа действия однофазного асинхронного двигателя воспользуемся графическим методом разложения пульсирующего магнитного
![]()
![]() потока на два одинаковых, равных Фмах/2, магнитных потока Фпр и Фобр, вращающихся в разные стороны с одинаковой частотой (рис. 4.2),
потока на два одинаковых, равных Фмах/2, магнитных потока Фпр и Фобр, вращающихся в разные стороны с одинаковой частотой (рис. 4.2),
об/мин: nпp=noбp=f1*60/p=n1. Считаем поток Фпр, вращающийся в направлении вращения ротора, прямым, а поток Фобр — обратным. Допустим, что ротор двигателя вращается против часовой стрелки, т. е. в направлении потока Фпр. Частота вращения ротора n2 меньше частоты вращения магнитного потока n1, поэтому скольжение ротора относительно потока Фпр sпр=(n1—n2) /n1=s. Магнитный поток Фобр вращается встречно ротору, по этому частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр sобр=(n1+n2)/n1=2-sпр. Прямой Фпр и обратный Фобр магнитные потоки наводят в обмотке ротора ЭДС Е2пр и Е2обр которые создают в короткозамкнутом роторе соответственно токи I2 пр и I2обр. Частота тока в роторе пропорциональна скольжению, следовательно, f2пр= f1sпр; f2обр=f1(2-sпр). Таким образом, ток I2обр, наводимый обратным магнитным потоком в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f 2пр тока ротора I2пр, наведенного прямым потоком. В результате взаимодействия тока I2пp с магнитным потоком Фпр возникает электромагнитный момент Мпр= cмФпрI2пpcosj2пр, где См — постоянный коэффициен т, определяемый конструкцией двигателя. Ток I2обр, взаимодействуя с магнитным потоком Фобр, создает электромагнитный момент Мовр, направленный встречно Mпp, т. е. против вращения ротора; Мобр= смФобрI2обрcosj2обр. Результирующий электромагнитный момент, действующий на ротор однофазного асинхронного двигателя, М=Мпр—Мобр. При небольших значениях скольжения s=sпp, т.е. при работе двигателя в пределах номинальной нагрузки, электромагнитный момент создается в основном за счет Мпр. Тормозящее действие момента обратного поля Мобр— незначительно. Объясняется это тем, что f2обр>>f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора Х2обр=Х2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его. Если учесть, что коэффициент мощности cos j2обр= r2/sqrt(r2^2+x2обр^2) невелик, то станет ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.
2. Электромагнитное реле.
Реле – это устройство, в котором при достижении определенного значения входной величины выходная величина изменяется скачком – выходные контакты либо замыкаются – в управляемой цепи появляется ток (напряжение), либо размыкаются.
 Электромагнитные реле по конструктивному исполнению воспринимающего элемента бывают клапанного типа и с поворотным якорем.
Электромагнитные реле по конструктивному исполнению воспринимающего элемента бывают клапанного типа и с поворотным якорем.
На рис. Показано устройство простейшего электромагнитного реле клапанного типа: при определенной м.д.с. в цепи управления возникающая электромагнитная сила F притяжения якоря 3 к ярму 1 превышает силу противодействующей пружины 2. Реле срабатывает, воздушный зазор уменьшается, клапан 4 нажимает на подвижный контакт 5 и прижимает его с силой F, зависящей от значения воздушного зазора в конце хода якоря, к неподвижному контакту 6. Управляемая цепь (цепь управления) замыкается, исполнительный элемент 7 производит требуемое действие. Контакты реле в исходном состоянии могут как разомкнуты так и замкнуты. Условное графическое обозначение контактов (замыкающие, размыкающие) показано на рис.
Многие электромагнитные реле имеют несколько контактных пар, тогда их используют для управления несколькими электрическими цепями. Электрические реле выполняют множество функций, связанных с контролем режимов работы важных элементов электрической цепи – генераторов, трансформаторов, линии передач, различных приемников.
В зависимости от времени срабатывания – отрезка времени от момента появления управляющего воздействия до момента замыкания контактов реле – различают реле быстродействующие (tср<0,05 с), нормальные (tср=0,05...0,25 с) и с выдержкой времени (реле времени). Если реле «реагирует» только на значение входной величины (тока) и «не реагирует» на направление этой величины, то его называют нейтральным. Реле, «чувствующие» полярность (направление) входной величины (напряжения, тока), называются поляризованными. По способу воздействия исполнительного элемента реле на управляемую величину различают реле прямого действия , в которых исполнительный элемент (подвижная контактная система) непосредственно воздействует на цепь управления, и реле косвенного действия , в кот. исполнительный элемент воздействует на контролируемую цепь через другие аппараты. По способу включения воспринимающего элемента различают первичные, вторичные и промежуточные реле. Воспринимающим элементом электромагнитных реле является электромагнит, преобразующий управляющий ток (напряжение) в перемещение якоря относительно ярма. Воспринимающий элемент первичных реле включается непосредственно в контролируемые цепи. У вторичных реле воспринимающий элемент включается в контролируемые цепи через измерительные трансформаторы. Промежуточные реле работают в цепях исполнительных элементов других реле и предназначаются для усиления и преобразования сигналов первичных или вторичных реле.
Для любого реле характерным является не только время срабатывания , но и время отпускания – промежуток времени с момента разрыва цепи тока управления до момента размыкания (или замыкания) контактов реле.
Билет №4
1. Электромагнитный момент машины постоянного тока. Электромагнитная мощность.
согласно 1 з-ну Ньютона в применении к вращающемуся телу действующая на это тело движущая и тормозные вращающие м-ты уравновешивают др.др поэтому в генераторе при установившемся режиме работы эл-маг м-т Мэм=Мв-Мтр-Мс, где Мв - м-т на валу генератора развиваемый первичным двигателем, Мтр- м-т сил трения в подшипниках о воздух и на коллекторе ЭМ, Мс - тормозной м-т, вызываемый потерями на гистер.и вихревые токи в сердечнике якоря. Эти потери мощности появляются в рез-те вращения сердечника якоря в неподвижном магнитном поле полюсов. Возникающие при этом эл-маг силы оказывают на якорь тормозящее действие и в этом отношении проявляют себя подобно силам трения. В двигателе при устан.режиме работы Мэм=Мв+Мтр+Мс, где Мв - тормозной м-т на валу двигателя, развиваемый рабочей машиной. В генераторе Мэм является тормозным, а вдвигателе - вращающим м-ом, причем в обоих случаях Мв и Мэм противоположны по направлению. Развиваемая эл-маг м-ом Рэм- называется эл-маг мощностью и равна Рэм=Мэм2 пи n,( где 2 пи n представляет собой угловую скорость вращения). Если учесть, что линейная скорость на окружности якоря v=Pi*Da*n, тогда получим , что Рэм=2B*l*v*Ia, или Рэм=Еа*Ia. В обмотке якоря под действием ЭДС Еа и тока Ia развивается внутренняя эл мощность якоря Ра=Еа*Iа.получили, что внутренняя эл мощность якоря равна эл-маг мощности, развиваемой эл-маг м-ом, что отражает процесс преобразования мех.энергии в эл в генераторе и обратный процесс в двигателе. Для генератора имеем Ua*Ia=Ea*Ia-Ia^2*ra и для двигателя Ua*Ia=Ea*Ia+Ia^2*ra. Левые части этих выражений представляют собой эл мощности на зажимах якоря, первые члены правых частей- эл-маг мощность якоря и последние члены- эл потери мощности в якоре. Эти соотношения являются выражением з-на сохранения энергии и отражают процесс преобразования энергии в МПТ.
![]() 2. Общие сведения об измерительных преобразователях. Делители напряжения, шунты, добавочные резисторы.
2. Общие сведения об измерительных преобразователях. Делители напряжения, шунты, добавочные резисторы.
Для того чтобы ту или иную неэлектрическую величину измерить, ее нужно
предварительно преобразовать в электрич. сигнал. Такое преобразование осуществляется с помощью датчиков или первичных преобразователей. На рис. показана структурная схема для измерения неэлектрич. вел-ны электрич. методом. Здесь ПП- первичный преобразователь, ЭЦ- электрическая измерительная цепь, ВУ- выходное устройство. Измеряемая неэлектрич. вел-на Х поступает на вход ПП, на выходе которого появляется эл. сигнал У(Х). Далее этот сигнал преобразуется в ЭЦ в другой эл. сигнал У’ , который воспринимается ВУ, в результате чего на выходе всего устройства получается , например, отклонение указателя а(Х). Шкала выходного устройства градуирована непосредственно в знач. неэлектрич. вел-ны Х. Первичные преобразователи (ПП), используемые в измерениях, делятся на генераторные и параметрические. Генераторные ПП вырабатывают э.д.с. или ток и для их работы , как правило, не требуется дополнительный источник питания ( термозлектрические, пьезоэлектр., гальванические преобразователи). Параметрические ПП преобразуют изменение измеряемой неэлектрич. вел-ны в изменения того или иного параметра эл. цепи (R,L,M,C) и для их работы требуется дополнит. источник питания ( терморезисторы , реостатные, индуктивные и емкостные преобразователи). Электрич. измерительные цепи (ЭЦ) в рассматриваемых устройствах состоят обычно из мостов или измерительных потенциометров. В простейшем случае ЭЦ может отсутствовать, и сигнал У поступает непосредственно на выходной прибор. Выходные устройства весьма различны –от стрелочного магнитоэлетр. вольтметра до самопишущего прибора. Делители напряжения. В зависимости от назначения эл. цепи ее зл-ты могут соединяться различным образом. Сущ-ют 4 основных вида соединений эл-тов: последовательное, параллельное, треугольником и звездой. Послед. назыв. соед. , при котором ток в каждом элементе один и тот же. Для этих схем можно написать: U1+U2+…+Un=U или R1*I+R2*I+…+Rn*I=Rэк*I , следовательно Rэк=R1+R2+…+Rn. Послед. соед. Приемников используют обычно только а том случае, когда напряжения ,на которые они рассчитаны , меньше напряжения источника эл. энергии. Недостатком послед. соед. Приемников явл.то, что напряжение на каждом из них зависит от сопрот. других приемников. Поскольку напряжение источника равно сумме напряжений на последовательно включенных эл-тах цепи, последовательное соед. эл-тов применяют часто а качестве делителей напряжений и для регулир. напряж. на приемнике. Так, при исполозовании двигателей постоянного тока последоват. с цепью якоря включ. реостаты для ограничения пускового тока ( пусковые реостаты) и регулирования частоты вращения (регулировачные реостаты).Для измерения больших токов применяют амперметры, в которых магнитоэлектрический измерительный механизм включается в сочетании с шунтом. Шунтом называют резистор малого сопротивления, подключаемый параллельно к измерительному механизму(ИМ). Шунт служит для расширения предела измерения прибора по току. Сопротивление шунта выбирают из соотношения
Rш=Rи/(n-1), где Rи-сопритивление обмотки ИМ, n=I/Iи-коэф. шунтирования; I – измеряемый ток; Iи- допустимый ток обмотки. В вольтметре для расширения пределов измерения по напряжению последовательно с измерительным механизмом подключают резистор большого сопротивления, называемый добавочным резистором. Сопротивление добавочного резистора опред. из соотношения Rn=Rи*(m-1), где Rи-спротивление обмотки ИМ; m=U/Umv- масштабный коэф.; U- измеряемое напряжение ; Umv- допустимое напряжение на обмотке ИМ.
Шунты и добавочные резисторы являются простейшими измерительными преобразователями.
Билет №5
1. Универсальный коллекторный электродвигатель.
![]() работает как от сети постоянного тока, так и от сети переменного тока. Возможность работы коллекторного двигателя последовательного возбуждения от сети переменного тока объясняется тем, что при изменении полярности подводимого напряжения изменяются направления токов в обмотке якоря и в обмотке возбуждения. При этом изменение полярности полюсов статора практически совпадает с изменением направления тока в обмотке якоря. В итоге направление
работает как от сети постоянного тока, так и от сети переменного тока. Возможность работы коллекторного двигателя последовательного возбуждения от сети переменного тока объясняется тем, что при изменении полярности подводимого напряжения изменяются направления токов в обмотке якоря и в обмотке возбуждения. При этом изменение полярности полюсов статора практически совпадает с изменением направления тока в обмотке якоря. В итоге направление
электромагнитного вращающего момента не изменяется: М=CмIaФ=см(-Iа)(-Ф). В качестве универсального используют двигатель последовательного возбуждения, у которого ток якоря является и током возбуждения, что обеспечивает почти одновременное изменение направления тока в обмотке якоря Iа и магнитного потока возбуждения Ф при переходе от положительного полупериода переменного напряжения сети к отрицательному. Если двигатель подключить к сети синусоидального переменного тока, то ток якоря ia и магнитный поток Ф будут изменяться по синусоидальному закону: i=Imax*sin(w1t); Ф=Фmax*sin(w1t-d), где d—угол сдвига фаз между током возбуждения и магнитным потоком, обусловленный магнитными потерями в двигателе. Используя это выражения, получим формулу эл-маг момента коллекторного двигателя последовательного возбуждения, включенного в сеть синусоидального переменного тока, Нм: М'=Cм*Imax*Фmax* sinw1tsin(w1t-δ). При работе универсального коллекторного двигателя от сети переменного тока перемагничиванию подвергается вся магнитная система двигателя, включая станину и полюса. Это приводит к увеличению магнитных потерь, для уменьшения которых станину и полюса статора приходится делать шихтованными. Коэффициент полезного действия универсального двигателя при его работе от сети переменного тока более низкий, чем при его работе от сети постоянного тока. Другой недостаток универсального двигателя — тяжелые условия коммутации, вызывающие интенсивное искрение на коллекторе при включении двигателя в сеть переменного тока. Этот недостаток объясняется наличием трансформаторной связи между обмотками возбуждения и якоря, что ведет к наведению в коммутируемых секциях трансформаторной ЭДС, ухудшающей процесс коммутации в двигателе. Частота вращения универсальных двигателей регулируется так же, как и в двигателях постоянного тока последовательного возбуждения. Наличие щеточно-коллекторного узла является причиной ряда недостатков универсальных коллекторных двигателей, особенно при их работе на переменном токе (искрение на коллекторе, радиопомехи, повышенный шум, невысокая надежность). Однако эти двигатели по сравнению с асинхронными и синхронными при частоте питающего напряжения f1=50 Гц позволяют получать частоту вращения до 10000 об/мин и более (наибольшая синхронная частота вращения при f1=50 Гц равна 3000 об/мин). Bзготавливаются несколько серий универсальных коллекторных двигателей например УВ, УЛ, МУН.
2. Электрические контакты. Износостойкость контактов, устройства дугогашения .
Соединение двух (или более) токоведущих элементов электрической цепи называют электрическим контактом. Различают подвижные и неподвижные контакты. При наличии неподвижных контактов токоведущие эл-ты эл. цепи в процессе работы не перемещаются друг относительно друга. В случае подвижных контактов (рычажные , скользящие контакты,) эл-ты цепи в процессе работы замыкаются и размыкаются. Важной характеристикой контактов явл. их электрическое сопротивление. Оно определяется в основном переходным сопрот., зависящим от площади контактирования. Для ум. переход. сопрот. стремятся увеличить силу прижатия контактов. Наличие тока в цепи контактов вызывает их нагрев, который пропорц. переход. сопрот. Т.е. по мере увеличения номинального тока коммутирующего аппарата необходимо повышать контактное нажатие. Кроме того , с ростом тока необходимо увеличить пов-ть охлаждения, т.е. размеры контактирующтх поверхностей. Размыкание электрической цепи при значительных токах и напряжениях, как правило сопровождается электрич. разрядом между расход. контактами. При расхождении контактов резко возрастает переходное сопротивление контакта и плотность тока в последней площадке контактирования. Контакты разогреваются до расплавления и образуется контактный перешеек из расплавленного металла, который при дальнейшем расхождении контактов рвется, и происходит испарение металла контактов.
Воздушный промежуток между контактами ионизируется и становится проводящим, в нем под действием высокого напряжения появляется электрическая дуга. Электрич. дуга способствует разрушению контактов и снижает быстродействие коммутационного аппарата. Наиболее эффективным способом гашения электрической дуги является ее охлаждение за счет перемещения в воздухе, соприкосновения с изоляционными стенками спец. Камер, которые отбирают теплоту дуги. В современных аппаратах широкое применение получили дугогасительные камеры с узкой щелью и магнитным дутьем. Дугу можно рассматривать как проводник с током; если его поместить в магнитное поле, то возникнет сила, которая вызовет перемещение дуги. При своем движении дуга обдувается воздухом; попадая в узкую щель между двумя изоляционными пластинами, она деформируется и в следствии повышения давления в щели камеры гаснет.
Билет №6
 1.Генератор постоянного тока независимого и параллельного возбуждения. Характеристики.
1.Генератор постоянного тока независимого и параллельного возбуждения. Характеристики.
В генераторе такого типа то возбуждения Iв не зависит от тока якоря Ia, который равен току нагрузки Iн. Ток Iв определяется только положением регулировочного реостата Rрв включенного в цепь обмотки возбуждения Iв=Uв/(Rв+ Rрв), где Uв – напряжение источника питания, Rв- сопротивление обмотки возбуждения. Основными хар-ми определ-ми св-ва ГПТ яв-ся хар-ки: ХХ,
![]() внешняя, регулировочная и нагрузочная. Хар-ой хол хода наз зависимость U0
=f(Iв) при Iн=0 и n=const. Рис1 При холостом ходе
внешняя, регулировочная и нагрузочная. Хар-ой хол хода наз зависимость U0
=f(Iв) при Iн=0 и n=const. Рис1 При холостом ходе
когда цепь нагрузки разомкнута, напряжение U0 на зажимах обмотки равно ЭДС. Частота вращения якоря n поддерживается неизменной и напряжение при холостом ходе зависит только от магнитного потока Ф. Расхождение ветвей объясн-ся наличием гистерезиса в магнитопроводе
машины. Внешней хар-ой наз зависимость U=f(Iн) при n=const, Iв=const. В режиме нагрузки напряжение генератора U=E-IaΣRa,
Σra- сумма сопротивлений всех обмоток, включенных последовательно в цепь якоря. С увелич-ем нагрузки на уменьшение напряжения влияют: 1) падение напр-я во внутреннем сопротивл-ии Σra машины. 2) уменьшение ЭДС Е в резулт. размаг. Действия реакции якоря. Рис2
![]()
![]() Регулировочной хар-ой наз зависимость Iв=f(Iн) при U=const, n=const. Она показывает каким образом следует регулировать ток возбуждения чтобы поддерживать
Регулировочной хар-ой наз зависимость Iв=f(Iн) при U=const, n=const. Она показывает каким образом следует регулировать ток возбуждения чтобы поддерживать
![]() постоянным напряжение генератора при изменении нагрузки рис3. Нагрузочной харк-ой назыв. зависимость U=f(Iв) при n=const, Iн=const. Если Iн=Ia то кривая 2. рис4
постоянным напряжение генератора при изменении нагрузки рис3. Нагрузочной харк-ой назыв. зависимость U=f(Iв) при n=const, Iн=const. Если Iн=Ia то кривая 2. рис4
 Генератор постоянного тока парал..возбуждения.
Рис 5 в ГПВ ОВ присоединена через регулиров. Реостат параллельно нагрузке. ХХХ U=F(iв) при I=0 и при n=const при параллельном возбуждении м.б снята только в одном квадранте путем регулирования iв с помощью регулировочного реостата.В этом случае используется принцип самовозбуждения di/dt=(e-iвΣRв)/Lв. Из него следует что для самовозбуждения генератора необходимо выполнение определ условий:1) процесс самовозбуждения может начаться только в том случае если в нач момент (iв=0) в обмотке якоря индуцируется некоторая начал ЭДС.2) при прохождении тока iв по обмотке возбуждения ее МДС Fв должна быть направлена согласно МДС остаточного магнетизма Fост.
Генератор постоянного тока парал..возбуждения.
Рис 5 в ГПВ ОВ присоединена через регулиров. Реостат параллельно нагрузке. ХХХ U=F(iв) при I=0 и при n=const при параллельном возбуждении м.б снята только в одном квадранте путем регулирования iв с помощью регулировочного реостата.В этом случае используется принцип самовозбуждения di/dt=(e-iвΣRв)/Lв. Из него следует что для самовозбуждения генератора необходимо выполнение определ условий:1) процесс самовозбуждения может начаться только в том случае если в нач момент (iв=0) в обмотке якоря индуцируется некоторая начал ЭДС.2) при прохождении тока iв по обмотке возбуждения ее МДС Fв должна быть направлена согласно МДС остаточного магнетизма Fост.
Внешняя характеристика U=F(I) ГПВ снимается при
Rв=const и n=const, те без регулирования вцепи возбуждения, при естественных условиях работы.
 Характерной особенностью ВХ ГПВ является то, что при некотором макс.значении тока (точка А) она делает петлю и приходит в точку Б на оси абсцисс, которая соответствует установившемуся току КЗ. Ток Ikуст отн-но мал и определяется остаточным магнитным потоком. Такой ход хар-ки объясняется следующим. При увеличении тока I на
Характерной особенностью ВХ ГПВ является то, что при некотором макс.значении тока (точка А) она делает петлю и приходит в точку Б на оси абсцисс, которая соответствует установившемуся току КЗ. Ток Ikуст отн-но мал и определяется остаточным магнитным потоком. Такой ход хар-ки объясняется следующим. При увеличении тока I на
пряжение U падает сначало медленно, а затем быстрее, тк с уменьшением U и iв падает поток Ф, магн.цепь становится менее насыщенной и малое уменьшение iв будут вызывать все большее уменьшение Ф и U. Точка А соответствует переходу ххх с нижней части колена на прямолинейный ненасыщеный участок. Начиная с т.А дальнейшее уменьшение сопротивления нагрузки не только не вызывает увеличения I, а на оборот, происходит уменьшение I, тк U падает быстрее, чем Rн.
 2. Потери мощности и КПД трансформатора. Энергетическая диаграмма.
под нагрузкой часть активной мощности р1, поступающей в первичную обмотку из сети, рассеивается в трансформаторе на покрытие потерь. В итоге активная мощность Р2, поступающая в нагрузку, оказывается меньше мощности Р1 на величину суммарных потерь в трансформаторе суммаР: Р1=Р2+суммаР. В трансформаторе есть два вида потерь — магнитные и электрические. Магнитные потери Рм в стальном магнитопроводе, по которому замыкается переменный магнитный поток Фmax, складываются из потерь на гистерезис Рг вихревые токи Рвх Рм=Рг+Рвх. Магнитные потери прямо пропорциональны массе магнитопровода и квадрату магнитной индукции в нем. Они также зависят от свойств стали, из которой изготовлен магнитопровод. Уменьшению потерь на гистерезис способствует изготовление магнитопровода из ферромагнитных материалов (электротехнической стали или сплава типа пермаллой). Обладающих небольшой коэрцитивной силой (узкой петлей гистерезиса). Для уменьшения потерь на вихревые токи магнитопровод изготавливают шихтованным (из тонких стальных пластин, изолированных друг от друга тонким слоем лака или оксидной пленкой) или витым из стальной ленты. Магнитные потери зависят также и от частоты переменного тока: с увеличением частоты f магнитные потери возрастают за счет потерь на гистерезис Рг и вихревые токи Рвх. Ранее было установлено, что основной магнитный поток в магнитопроводе не зависит от нагрузки трансформатора, поэтому при изменениях нагрузки магнитные потери остаются практически неизменными. Электрические потери — это потери в обмотках транс форматора, обусловленные нагревом обмоток токами, проходящими по ним. Рэ=Рэ1+Рэ2=I12
*r1+I22
*r2. Электрические потери являются переменными, так как их величина пропорциональна квадрату токов в обмотках. Электрические потери при любом токе нагрузки I2 трансформатора, Вт, Рэ=Рэном*b2
, где Рэном — электрические потери при номинальном токе нагрузки; b=I2/I2ном — коэффициент нагрузки, характеризует степень нагрузки трансформатора. Коэффициент полезного действия (КПД) трансформатора представляет собой отношение активных мощностей на его выходе Р2 и входе P1: КПД=P2/P1 = P2/(P2+Pм+Pэ)- Активная мощность на выходе трансформатора, Вт, Р2=Sном*bcosj2, где Sном- номинальная мощность трансформатора; cosj2 - коэффициент мощности нагрузки. Получим кпд=Sномbcosj2/( Sномbcosj2+Pм+Рэномb^2) Таким образом, КПД трансформаторов зависит от ветчины нагрузки р и от ее характера cosj2. Графически та зависимость представлена на рис. 1
2. Потери мощности и КПД трансформатора. Энергетическая диаграмма.
под нагрузкой часть активной мощности р1, поступающей в первичную обмотку из сети, рассеивается в трансформаторе на покрытие потерь. В итоге активная мощность Р2, поступающая в нагрузку, оказывается меньше мощности Р1 на величину суммарных потерь в трансформаторе суммаР: Р1=Р2+суммаР. В трансформаторе есть два вида потерь — магнитные и электрические. Магнитные потери Рм в стальном магнитопроводе, по которому замыкается переменный магнитный поток Фmax, складываются из потерь на гистерезис Рг вихревые токи Рвх Рм=Рг+Рвх. Магнитные потери прямо пропорциональны массе магнитопровода и квадрату магнитной индукции в нем. Они также зависят от свойств стали, из которой изготовлен магнитопровод. Уменьшению потерь на гистерезис способствует изготовление магнитопровода из ферромагнитных материалов (электротехнической стали или сплава типа пермаллой). Обладающих небольшой коэрцитивной силой (узкой петлей гистерезиса). Для уменьшения потерь на вихревые токи магнитопровод изготавливают шихтованным (из тонких стальных пластин, изолированных друг от друга тонким слоем лака или оксидной пленкой) или витым из стальной ленты. Магнитные потери зависят также и от частоты переменного тока: с увеличением частоты f магнитные потери возрастают за счет потерь на гистерезис Рг и вихревые токи Рвх. Ранее было установлено, что основной магнитный поток в магнитопроводе не зависит от нагрузки трансформатора, поэтому при изменениях нагрузки магнитные потери остаются практически неизменными. Электрические потери — это потери в обмотках транс форматора, обусловленные нагревом обмоток токами, проходящими по ним. Рэ=Рэ1+Рэ2=I12
*r1+I22
*r2. Электрические потери являются переменными, так как их величина пропорциональна квадрату токов в обмотках. Электрические потери при любом токе нагрузки I2 трансформатора, Вт, Рэ=Рэном*b2
, где Рэном — электрические потери при номинальном токе нагрузки; b=I2/I2ном — коэффициент нагрузки, характеризует степень нагрузки трансформатора. Коэффициент полезного действия (КПД) трансформатора представляет собой отношение активных мощностей на его выходе Р2 и входе P1: КПД=P2/P1 = P2/(P2+Pм+Pэ)- Активная мощность на выходе трансформатора, Вт, Р2=Sном*bcosj2, где Sном- номинальная мощность трансформатора; cosj2 - коэффициент мощности нагрузки. Получим кпд=Sномbcosj2/( Sномbcosj2+Pм+Рэномb^2) Таким образом, КПД трансформаторов зависит от ветчины нагрузки р и от ее характера cosj2. Графически та зависимость представлена на рис. 1
зависимость η=f(b) при cosφ2=1 –(график1), cosφ2<1(график2).
Максимальное значение кпд соответствует нагрузке b' при которой электрические потери равны магнитным (Рэ.номb'^2 =Рм) Номинальное значение КПД тем выше, чем больше номинальная мощность трансформатора Sном. У
более мощных трансформаторов КПД может достигать Т1„ом = 0,98 - 0,99. Все эти потери мощности и энергии в трансформаторе наглядно принято изобажать в виде энергетической диаграммы
КПД тр=>η=P2/P1, с учетом потерь η=1-((Рэ1+Рс+Рэ2)/(Р2+Зэ1+Рэ2))Однако КПД для трансф значит выше чем у других электр преобраз. Поэтому определ коэф-т полезного дейсьвия с достаточной точностью через отношение мощностей практически невозможно.
Билет№7
1. Асинхронный двигатель с фазным ротором. Характеристики.
Принцип действия асинхронных двигателей основан на двух явлениях: образовании рабочего вращающегося магнитного поля токами в обмотке статора и воздействии этого поля на токи, индуцированные в короткозамкнутых витках ротора. В зависимости от способа образования вращ. магнитного поля различают трехфазные и двухфазные обмотки статора. Статор машины собирают из штампованных листов электротехнической стали. По внутренней кромке листов вырублены пазы, которые создают в статоре каналы для укладки проводников обмотки. Пакет листов статора запрессован в корпус – оболочку, который имеет соединительные элементы для крепления к неподвижному жесткому основанию. Обмотку статора выполняют в виде одно- и многовитковых катушек, имеющих, как правило, одинаковые размеры. Каждая фаза статорной обмотки состоит из нескольких последовательно включенных катушек.Ротор асинхронной машины также набирают из штампованных листов электротехнической стали, которые запрессовывают на вал. Роторы изготавливают двух типов: 1)с трехфазной обмоткой, соединенной звездой, выводы которой подключены к контактным кольцам; 2)с короткозамкнутой обмоткой, получившей название «беличье колесо». У двигателя с контактными кольцами к обмотке ротора присоединяют посредством щеток трехфазный реостат с целью улучшения пусковых характеристик машины. После окончания пуска кольца замыкают накоротко. Трехфазную обмотку выполняют из изолированного провода, а кольца изолируют от вала двигателя. Механической характеристикой наз. зависимость скорости или частоты вращения n2 ротора от электромагнитного момента М. В установившемся режиме этот момент равен противодействующему моменту Мпр рабочего механизма.
 Механическую характеристику
(М) можно построить по кривой М(s), используя соотношение:
Механическую характеристику
(М) можно построить по кривой М(s), используя соотношение:
![]()
Устойчивая работа двигателя возможна на участке
![]() (М<Мm), где проявляется свойство саморегулирования двигателя.
(М<Мm), где проявляется свойство саморегулирования двигателя.
Номинальный момент определяет допустимый момент на валу двигателя при длительной неизменной нагрузке. Тепловой режим двигателя нормального исполнения(нагрев обмотки, вентиляция и т. д.) рассчитывают для этой нагрузки. Отношение Мm/Мном, называемое перегрузочной способностью, обычно выбирают равным 2 – 2,5 с учетом возможности кратковременных ударных нагрузок при пониженном напряжении в сети.
Рабочие характеристики показывают зависимость эксплуатационных параметров машины от мощности на валу двигателя Р2; к этим параметрам относят ток, активную мощность, КПД, скорость ротора и коэффициент мощности двигателя.
 Рабочие характеристики АД изображены на рис.
Рабочие характеристики АД изображены на рис.
По осям координат отложены относит. значения тока статора I1, скорости ротора и мощности Р1, выраженные в долях от номинальных величин I1ном, скорости поля и номинальной мощности Р2ном.В реж. х.х. , когда М~0, ток I1=I1х. Значение тока I1х зависит от магнитного
сопротивления воздушного зазора между статором и ротором. Поэтому зазор делают небольшим – порядка десятых долей миллиметра. Тем не менее ток I1х=(0,2..0,5)I1ном в зависимости от мощности двигателя, что на порядок больше по сравнению с относительным значением тока I1х у трансформаторов. Ток I1х имеет активную составляющую, связанную с потерями в магнитопроводе и в обмотке статора.По мере роста нагрузки на валу увеличивается ток статора, в основном его активная составляющая. Коэффициент мощности
![]() при х.х. определяется мощностью потерь в магнитопроводе:
при х.х. определяется мощностью потерь в магнитопроводе:
![]()
Обычно cosf1х имеет значение 0,2..0,3, что указывает на недопустимость длительной работы двигателя без нагрузки. При номинальной нагрузке cosf1=0,7..0,8.
КПД:
![]() при отсутствии нагрузки равен 0. по мере увеличения мощности Р2 КПД повышается. При больших нагрузках рост КПД замедляется, затем КПД начинает уменьшаться, т.к. потери в обмотках пропорциональны квадрату токов, а зависимость токов от мощности Р2 близка к линейной.
при отсутствии нагрузки равен 0. по мере увеличения мощности Р2 КПД повышается. При больших нагрузках рост КПД замедляется, затем КПД начинает уменьшаться, т.к. потери в обмотках пропорциональны квадрату токов, а зависимость токов от мощности Р2 близка к линейной.
2)Электроизмерительные приборы с электростатическим измерительным механизмом. Электростатический механизм состоит из двух (и более) металлических изолированных пластин, выполняющих роль электродов. На неподвижные пластины подается потенциал одного знака, а на подвижные пластины – потенциал другого знака. Подвижная пластина вместе с указателем укреплена на оси и под действием сил электрического поля между пластинами поворачивается. При постоянном напряжении U между пластинами вращающий момент пропорционален зарядам Q=C*U на пластинах: Мвр=k*Q^2=k*(C*U)^2. При синусоидальном напряжении u=Um*sinwt подвижная часть механизма реагирует на средний вращающий момент, где U – действующее напряжение: Мвр.ср.=k2*U^2.Электростатические приборы, в которых используется электростатический механизм, применяют исключительно в качестве вольтметров постоянного и переменного напряжений. Из выражения для Мвр.ср. следует, что угол отклонения указателя электростатического прибора пропорционален квадрату напряжения, т.е. шкала прибора должна быть квадратичной. Однако подбором формы и размеров электродов получают практически равномерную шкалу. Электростатические вольтметры отличаются малым потреблением энергии, широким частотным диапазоном, нечувствительностью к внешним магнитным полям и колебаниям температуры, их показания не зависят от формы кривой напряжения. К недостаткам этих приборов следует отнести сравнительно низкую чувствительность. Кроме того, они требуют электростатического экранирования, т.к. на их показания оказывают влияние внешние электрические поля. Для расширения пределов измерения электростатических вольтметров используют емкостные и резистивные делители напряжения(рис.
Билет №8
1. Конструкция и принцип действия машины постоянного тока. ЭДС машины постоянного тока.
По конструктивному выполнению машина постоянного тока подобна обращенной синхронной машине, у которой обмотка якоря расположена на роторе, а обмотка возбуждения - на статоре. Основное отличие заключается в том, что машина постоянного тока имеет на якоре коллектор, а на статоре кроме главных полюсов с обмоткой возбуждения- добавочные полюсы, которые служат для уменьшения искрения под щетками. На статоре расположены главные полюсы с катушками обмотки возбуждения и добавочные полюсы с соответствующими катушками. Главные полюсы выполняют шихтованными, а добавочные- массивными или также шихтованными. Катушки главных и добав. полюсов изготовляют из изолированного медного провода. Расположенную на полюсе обмотку иногда разбивают на секции для лучшего ее охлаждения. Сердечник якоря собирают из изолированных листов электротехнической стали. Обмотка якоря обычно состоит из отдельных, заранее намотанных, якорных катушек, которые обматывают изоляционными лентами и укладывают в пазы сердечника якоря. Обмотку выполняют двухслойной. Коллектор обычно выполняют в виде цилиндра, собранного из клинообразных пластин твердотянутой меди; между пластинами располагают изоляционные прокладки. По цилиндрической части коллектора скользят щетки, установленные в щеткодержателях. Щетки представляют собой прямоугольные бруски, изготовленные путем прессовки и термической обработки из порошков графита, кокса и др. Они предназначены для соед. коллектора с внешней цепью и прижимаются к поверхности коллектора пружинами.
Принцип действия. Машина постоянного тока имеет обмотку возбуждения, расположенную на явно выраженных полюсах статора. По этой обмотке проходит постоянный ток Iв, который создает магнитное поле возбуждения Фв. На роторе расположена двухслойная обмотка, в которой при вращении ротора индуцируется ЭДС. Т.о. , ротор машины постоянного тока является якорем. При заданном направлении вращения якоря направление ЭДС, индуцируемой в его проводниках, зависит только от того , под каким полюсом находится проводник. При вращении якоря проводники обмотки перемещаются от одного полюса к другому;
![]() ЭДС, индуцируемая в них, изменяет знак. Однако количество проводников, находящихся под каждым полюсом, остается неизменным. При этом суммарная ЭДС, индуцируемая в проводниках, находящихся под одним полюсом , также неизменна по направлению и приблизительна постоянна по вел-не. Эта ЭДС снимается с обмотки якоря с помощью скользящего контакта, включенного между обмоткой и внешней цепью. Обмотка якоря выполняется замкнутой, симметричной (рис С-8.1,б)
ЭДС, индуцируемая в них, изменяет знак. Однако количество проводников, находящихся под каждым полюсом, остается неизменным. При этом суммарная ЭДС, индуцируемая в проводниках, находящихся под одним полюсом , также неизменна по направлению и приблизительна постоянна по вел-не. Эта ЭДС снимается с обмотки якоря с помощью скользящего контакта, включенного между обмоткой и внешней цепью. Обмотка якоря выполняется замкнутой, симметричной (рис С-8.1,б)
2. Асинхронный тахогенератор.
 Своим устройством асинхронный тахогенератор не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Полый ротор тахогенератора изготовляют из сплава с повышенным удельным сопротивлением не зависящим от температуры.
Своим устройством асинхронный тахогенератор не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Полый ротор тахогенератора изготовляют из сплава с повышенным удельным сопротивлением не зависящим от температуры.
У обмотки статора АТГ есть две 1-я ОВ, 2-я –генераторная обмотка. Считаем ось ОВ продольной d-d. Рассмотрим процессы происходящие в АТГ при неподвижном роторе (n=0). При включении обмотки возбуждения в сеть перем тока напр-ем U1 и частотой f1 возникает МДС Fв и в магнитопроводе генератора наводится пульс магнитный поток Фв направленный по оси d-d. Пронизывая полый ротор, поток наводит в нем ЭДС Етр, назыв трансформаторной. В ГО поток Фв не наводит ЭДС т.к ось обмотки q-q расположена под углом 90 эл. градусов к оси обмотки возбуждения d-d. Под действием Етр в стенках полого стакана возникнут токи I2тр, которые благодаря повышенному актив сопротивлению ротора практически совпадают по фазе с Етр. Токи I2тр создают МДС ротора F2d, направл по продольной оси встречно МДС Fв возбуждения . в результате взаимод Fв и F2d созд-ся результ магн поток по продольной оси Фd пульсирующий с частотой тока сети f1. Если ротор АТГ вращать с частотой n, то процесс наведения ЭДС не изменяется. По оси ОВ действ пульс ток ОВ. Но проводники ротора при вращении пересек магнит силовые линии этого потока и в них дополнит навод-ся ЭДС вращения.от действия этогг ЭДС возникает ток и магнитный поток Фг который наводит в ОГ генераторную ЭДС. Фг=>Ег4,44f1wог Фг. АТГ можно использовать в качестве датчика ускорений для получения сигнала пропорционального ускорению вала.
Билет №9
1. Конструкция и принцип действия синхронной машины.
Статор СМ имеет такое же устройство, как и статор АМ. Трехфазная или m-фазная обмотка статора СМ выполняется с таким же числом полюсов, как и ротор и называется обмоткой якоря. Сердечник статора вместе с обмоткой наз-ся якорем. Ротор СМ имеет обмотку возбуждения, питаемую через 2 контактных кольца и щетки постоянным током от посторонноего источника. В качестве источника чаще всего служит ГПТ относительно небольшой мощности (0.3-3% от мощности СМ), который называется возбудителем и устанавливается обычно на одном валу с СМ. Назначение ОВ - создание в машине первичного маг.поля. Ротор вместе со своей ОВ называется индуктором. При изготовленни СМ принимаются меры к тому, чтобы распределение индукции поля возбуждения вдоль окр.статора было по возможности близко к синусоидальному. Если ротор СМ привети во вращение с нек.скоростью n и возбудить его, то поток возбуждения Ф будет пересекать проводники обмотки статора и в фазах последней будут индуктироваться ЭДС с частотой f1=pn=pnM /60. ЭДС статора составляют симметричную трехфазную систему ЭДС, и при подключении к обмотке статора симметричной нагрузки эта обмотка нагрузиться симметричной системой токов, машина при этом будет работать в режиме Г. При нагрузке обмотка статора создает такое же по характеру вращающееся маг.п., как и обмотка статора АМ. Это поле статора вращается в направлении вращения ротора со скоростью n1=f1/p следовательно n1=n. Поля статора и ротора вращаются с одинаковой скоростью общее вращающееся поле как и в АМ. Поле статора (якоря) оказывает воздействие на поле ротора (индуктора) и называется полем реакции якоря. СМ может работать и качестве Д, если подвести к обмотке ее статора 3-фазный ток из сети. В этом случае в результате взаимодействия маг.полей поле статора увлекает за собой ротор. При этом ротор вращается в туже сторону и с такой же скоростью, что и поле статора. Из формулы следует, что чем больше число пар полюсов, тем меньше должна быть ее скорость вращения для получения заданной частоты. По своей конструкции СМ бывают явнополюсные и неявнополюсные
2. Электроизмерительные приборы с магнитоэлектрическим измерительным механизмом.
Магнитоэлектрический механизм содержит постоянный магнит и катушку с током. Рассмотрим работу магнитоэлектрического измерительного механизма на примере конструкции с внутрирамочным магнитом(рис.).
 Его магнитная система состоит из постоянного магнита 3 и замкнутого кольца 2 из магнитомягкого ферромагнитного материала. В рабочем зазоре между ними образуется радиальное магнитное поле. Подвижная катушка 1, выполненная из тонкого изолированного провода, намотанного на алюминиевый
Его магнитная система состоит из постоянного магнита 3 и замкнутого кольца 2 из магнитомягкого ферромагнитного материала. В рабочем зазоре между ними образуется радиальное магнитное поле. Подвижная катушка 1, выполненная из тонкого изолированного провода, намотанного на алюминиевый
каркас, помещена в рабочем зазоре и укреплена на растяжках. Она может свободно поворачиваться вокруг своей оси. Концы обмотки электрически соединены с растяжками, по которым ток поступает в катушку. При наличии в обмотке постоянного тока I на активную сторону витков w обмотки длиной l, находящуюся в равномерном магнитном поле зазора с магнитной индукцией В0, действует сила F, которая, согласно з-ну Ампера, равна F=B0*l*I*w. Под действием пары таких сил, действующих на обе активные стороны обмотки, создается вращающий момент Мвр= В0*l*b*w* I=B0*S*w*I=Y0*I. S – площадь обмотки, равная произведению длины l на ширину b; Y0=B0*S*w – постоянная прибора, равная максимальному потокосцеплению катушки. Из последнего выражения видно, что вращающий момент пропорционален току. Под действием Мвр подвижная часть механизма вместе с указателем поворачивается на некоторый угол α , который пропорционален току I: α=Si*I, где Si=Y0/k – чувствительность ИМ по току, величина постоянная, не зависящая от тока. Магнитоэлектрические приборы, в которых используются магнитоэлектрические механизмы, применяют для измерения постоянных токов и напряжений, а также в качестве измерителей сопротивления и гальванометров.
Билет №10
1. Конденсаторный асинхронный двигатель.
 |
имеет на статоре 2 обмотки, которые обе являются рабочими, и в одну из них включается емкость Ср, значение которой рассчитывается так, что при номинальной нагрузке существует только вращающееся поле прямой последовательности. Обе обмотки при этом имеют фазные зоны по 90 эл.град и сдвинуты друг относительно друга в пространстве также на 90. Мощность обеих обмоток при Р=Рн одинакова, но их числа витков, токи и напряжения различны. КД представляет собой 2-фазный Д, который подключен посредством конденсатора Ср к однофазной сети и при Р=Рн имеет симметричную нагрузку фаз. Емкость Ср, подобранная по рабочему режиму, недостаточна для получения высокого пускового момента. Поэтому в необходимых случаях параллельно Ср на время пуска включается добавочная, пусковая мощность Сп. Использование материалов в КД и его КПД значительно выше, чем в 1-фазных двигателях с пусковой обмоткой, и почти такие же, как у 3-фазных Д. Коэффициент мощности КД ввиду наличия конденсатора выше, чем у 3-фазных Д равной мощности. Для схемы включения КАД при заданном напряжении сети U емкость рабочего конденсатора, необходимая для получения кругового вращающего поля, Ф: Ср=Ia*cosja/(Ufk), где jа - угол фазового сдвига между током Ia и напряжением U при круговом вращающем поле; k - коэффициент трансформации. Емкость обеспечивает получение в Д кругового вращающегося поля только при k=tgja. Обычно КАД рассчитывают так, чтобы круговое вращающее поле соответствовало номинальной или близкой к ней нагрузке. Ср обратно пропорциональна напряжению сети, т.е. чем выше напряжение, тем меньшей емкости требуется конденсатор. КАД используются при повышенных условиях к пусковому моменту.
2. Астатические электроизмерительные приборы.
Билет №11
1.Однофазный асинхронный двигатель с экра
 нированными полюсами.
нированными полюсами.
имеет на статоре явно выраженные полюсы с однофазной обмоткой и ротор с обмоткой в виде беличьей клетки. Часть наконечника каждого полюса охвачена (экранирована) короткозамкнутым витком. Ток статора I1 создает в неэкранированной и экранированной частях полюса пульсирующие потоки Ф''1 и Ф'1. Поток Ф''1 индуктирует в кз витке ЭДС Ек, которая отстает на угол jк<90. Кз виток имеет определенное активное и индуктивное сопротивления, и его ток Iк отстает от ЭДС Ек на угол jк<90. Ток Iк создает поток Фк, и результирующий поток экранированной части полюса Фэ=Ф'1+Фк сдвинут по фазе относительно потока неэкранированной части полюса Ф'1 на некоторый угол y. Т.к. потоки Ф'1 и Фэ также сдвинуты в пространстве, то возникает вращающее поле. Это поле не круговое, а элиптическое, т.е. содержит также составляющую обратной последовательности, т.к. потоки Ф1 и Фэ не равны по значению и сдвинуты в пространстве и во времени на достаточно большие углы. Тем не менее, при пуске создается вращающий момент Мп=(0.2-0.5)Мн. Маг поле простейшего экранированного Д содержит значительную третью пространственную гармонику, которая вызывает большой провал кривой момента. Для улучшения формы поля применяют следующие меры: между наконечниками соседних полюсов устанавливают магнитные шунты из листовой стали, увеличивают зазор под неэкранированной частью полюса, на каждом полюсе помещают 2-3 кз витка разной ширины. Вследствие больших потерь в кз витке Д имеет низкий КПД (до 25-40%). ЭД простейшей конструкции строятся на мощности от долей вата до 20-30 Вт, а при усовершенствованной конструкции - до 300 Вт. Область примения - настольные вентиляторы, магнитофоны и пр.
2. Магнитный пускатель.
Магнитные пускатели осуществляют пуск, остановку и защиту двигателей от перегрузки. Они коммутируют номинальные токи и токи перегрузки. Пределы номинальных токов пускателей от 4 до 2500 А. Номинальные напряжения катушек пускателей постоянного тока изменяется от 24 до 440 В. А у пускателей переменного тока – от36 до 660 В. Механическая износостойкость определяет способность пускателя выполнять определенное число операций включение – отключение без тока в цепи главных контактов при наибольшей допустимой частоте циклов. Существуют пять классов механической износостойкости. Коммутационная износостойкость - это способность аппарата выполнять определенное число операций коммутации тока контактами при заданных условиях в цепи. Характерные величины этого вида износостойкости в циклах – 103 , 104 , 105 и 106 . Конструкция магнитного пускателя (очень примерно своими словами). Магнитный пускатель состоит катушки с сердечником (представляет собой электромагнит), якоря, контактов. При подачи напряжения на катушку, создается магнитное поле, которое притягивает к сердечнику якорь. Механически соединенные с якорем подвижные части замыкающихся контактов тоже приходят в движение и замыкаются с неподвижными (если имеются вспомогательные размыкающие контакты, то они размыкаются). Отличительной особенностью пускателей переменного тока является то, что сердечник и якорь выполнены шихтованными из электротехнической стали. И в торце сердечника находится накоротко замкнутое кольцо. Роль которого удержать якорь в притянутом состоянии (поддерживать магнитное поле) в момент, когда переменное напряжение достигает нулевого значения.
Билет №12
1. Асинхронный электродвигатель с полым немагнитным ротором.
Рис в лекции
Для повышения быстродействия исполнительного двигателя были созданы асинхронные исполнительные двигатели с полым немагнитным ротором. Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан, закрепленный на валу посредством втулки. Такой ротор имеет повышенное сопротивление r2, небольшую массу, а следовательно, малое значение электромеханической постоянной времени. Двигатель имеет два статора — внешний с обмоткой и внутренний без обмотки, расположенный внутри полого стакана ротора. Внутренний статор необходим для уменьшения магнитного сопротивления основному магнитному потоку двигателя. Возможна конструкция двигателя, когда обмотка статора расположена на внутреннем статоре. По сравнению с исполнительными двигателями с короткозамкнутой обмоткой ротора, двигатели с полым немагнитным ротором имеют большие габаритные размеры и невысокий КПД. Это объясняется тем, что между наружным и внутренним статорами имеется значительный немагнитный промежуток, в котором замыкается основной магнитный поток двигателя. Немагнитный промежуток складывается из толщины алюминиевого стакана и двух воздушных зазоров между поверхностями ротора и статоров. Увеличение немагнитного промежутка на пути основного магнитного потока способствует росту намагничивающего тока, а следовательно, снижению коэффициента мощности двигателя и КПД. Намагничивающий ток достигает 80—90% номинального тока в цепи статора. Достоинства асинхронных двигателей с полым немагнитным ротором: высокое быстродействие, большой диапазон регулирования частоты вращения, стабильность характеристик, малошумность в работе. Сравнение технических данных асинхронных исполнительных двигателей различной конструкции показывает, что у двигателей с кз обмоткой ротора благодаря «сквозной» конструкции и уменьшенному диаметру ротора постоянная времени Тeм меньше, чем у двигателей с полым немагнитным ротором (исключение составляют двигатели с полым немагнитным ротором, рассчитанные на частоту переменного тока 50 Гц). Относительное напряжение трогания Uтр/Uуном у двигателей с короткозамкнутой обмоткой ротора в несколько раз больше, чем у двигателей с полым немагнитным ротором, так как в двигателях с короткозамкнутым ротором возникает сила одностороннего магнитного притяжения ферромагнитного сердечника ротора к сердечнику статора. Причина возникновения этой силы — неравномерный воздушный зазор между статором и ротором. В двигателях «сквозной» конструкции при одностороннем зазоре, не превышающем 0.05 мм, даже незначительная неравномерность зазора вызывает заметные силы одностороннего магнитного притяжения, влияющие на напряжение трогания двигателя. По своему внешнему виду и габаритам эти двигатели не отличаются от синхронного реактивного Д типа СД-54.
2. Электроизмерительные приборы электродинамической системы.
Электродинамический механизм состоит из двух катушек: неподвижной 1 и подвижной 2. катушка 2 укреплена на растяжках и может поворачиваться вокруг оси внутри двух секций неподвижной катушки. При наличии в катушках постоянных токов I1 и I2 возникают электромагнитные силы взаимодействия, стремящиеся повернуть катушку 2 соосно с катушкой 1. Возникает вращающий момент Мвр=k*I1*I2. При синусоидальных токах i1=I1m*sinwt и i2=I2m*sin(wt – δ) мгновенное значение вращающего момента выражается ф-лой:
Mвр(t)=k*I1m*I2m*sinwt*sin(wt – δ) Средний вращающий момент, на который реагирует подвижная часть прибора, Мвр.ср.=k*I1*I2*cosδ. Вращающий момент электродинамического ИМ пропорционален произведению действующих значений токов в катушках и косинусу угла сдвига фаз между ними. Угол отклонения подвижной части и указателя α =k1*I1*I2*cosδ. Электродинамические приборы, в которых используются описанные механизмы, применяют в цепях постоянного и переменного токов в качестве амперметров и вольтметров. Также их можно использовать в качестве ваттметров. Электродинамические приборы отличаются высокой точностью, независимостью показаний от формы кривой тока или напряжения, пригодностью использования в цепях постоянного и переменного токов. К недостаткам этих приборов следует отнести сравнительно невысокую чувствительность, большое собственное потребление энергии, влияние внешних магнитных полей и ограниченный частотный диапазон. Электродинамические приборы являются одними из самых точных приборов переменного тока и широко применяются в лабораторной практике. Расширение пределов измерения достигается включением их через измерительные трансформаторы.
Билет№13
1.Асинхронный двигатель с двойной "беличьей клеткой" и глубокопазный.
 двигатели имеют на роторе две короткозамкнутые беличьи клетки, одна из которых оставляет собой так называемую пусковую обмотку, а вторая —рабочую. Рабочая обмотка выполняется из медных стержней и размещается— нижних частях пазов, а пусковая обмотка изготовляется из
двигатели имеют на роторе две короткозамкнутые беличьи клетки, одна из которых оставляет собой так называемую пусковую обмотку, а вторая —рабочую. Рабочая обмотка выполняется из медных стержней и размещается— нижних частях пазов, а пусковая обмотка изготовляется из
латунных или бронз стержней и располагается в верхних частях пазов, ближе к воздушному зазору. Сечение стержней пусковой обмотки может быть несколько меньше, чем у рабочей обмотки. Однако сечение и теплоемкость стержней пусковой обмотки должны быть достаточно велики, чтобы предотвратить чрезмерный нагрев этой обмотки при пуске. Иногда рабочую и пусковую обмотки размещают в отдельных пазах. В связи со сказанным активное сопротивление пусковой обмотки rп обычно в 2—4 раза больше активного сопротивления rр рабочей обмотки. Наоборот, индуктивное сопротивление рассеяния пусковой обмотки Хsп в несколько раз меньше, чем Хsр рабочей обмотки, поскольку последняя1 утоплена глубоко в стали сердечника ротора. Вращающееся магнитное поле двигателя индуктирует в обеих обмотках ротора одинаковые э. д. с. При пуске вследствие большой частоты тока ротора индуктивное сопротивление рабочей обмотки относительно велико и значительно больше полного сопротивления пусковой обмотки. Поэтому при пуске нагружена током в основном только пусковая обмотка, и ввиду большого ее активного сопротивления Д развивает большой пусковой момент. При разбеге двигателя частота тока ротора уменьшается, и при нормальной скорости вращения (s=0,02 — 0,05) индуктивные сопротивления рассеяния обмоток ротора будут в 20—50 раз меньше, чем при пуске. Поэтому в рабочем режиме активные сопротивления обмоток ротора значительно больше индуктивных и полные сопротивления обмотки определяются значениями активных сопротивлений. Вследствие этого при работе двигателя полное сопротивление рабочей обмотки значительно меньше, чем полное сопротивление пусковой, и током нагружена главным образом рабочая обмотка. Ввиду малости активного сопротивления этой обмотки двигатель имеет хороший к. п. д. Таким образом, в двухклеточном двигателе при пуске происходит вытеснение тока ротора по направлению к воздушному зазору, как и в глубокопазном двигателе. В пусковой обмотке двухклеточного двигателя при тяжелых условиях пуска (большой маховой момент приводимого агрегата пуск под нагрузкой) выделяется большое количество теплоты, и эта обмотка при пуске соответственно удлиняется, в то время как рабочая обмотка при пуске остается холодной и не удлиняется. Поэтому во избежание нарушения сварных соединении стержней с торцевыми кз кольцами стержни пусков рабочей обмоток присоединяются к отдельным кольцам. Глубокопазные двигатели.
![]() Одной из разновидностей таких двигателей являются двигатели с глубокими пазами на роторе и высокими (30—60 мм) стержнями беличьей клетки. Вытеснение тока в стержнях клетки происходит в результате действия ЭДС, индуктируем пазовыми потоками рассеяния Фд. Можно представить себе, что
Одной из разновидностей таких двигателей являются двигатели с глубокими пазами на роторе и высокими (30—60 мм) стержнями беличьей клетки. Вытеснение тока в стержнях клетки происходит в результате действия ЭДС, индуктируем пазовыми потоками рассеяния Фд. Можно представить себе, что
стержень состоит из множества волокон, включенных параллельно. Нижние волокна охватываются большим, а верхние волокна малым числом линий потока Фд. При пуске, когда частота в роторе велика (f2=f1) в нижних волокнах стержня индуктируется большая ЭДС самоиндукции, ÷eм в верхних, и плотность тока распределяя по высоте проводника весьма неравномерно. Можно также сказать, что такое неравномерное распределение тока обусловлено тем, что нижние волокна стержня имеют большее индуктивное сопротивление, чем верхние. Таким образом, ток в стержне вытесняется по направлению к воздушному зазору, что, в сущности, и есть проявление поверхностного эффекта в проводниках, утопленных в ферромагнитную среду. Под влиянием вытеснения тока, или поверхностного эффекта активное сопротивление стержня при пуске двигателя становится большим.. По мере разбега двигателя при его пуске частота тока в роторе уменьшается и по достижении номинальной скорости вращения становится весьма малой (f2=sn*f1<=1-3 Гц). При этом ЭДС индуктируемые потоком Фд, становятся малыми, явление вытеснения тока практически исчезает и ток распределяется равномерно по сечению стержня. Активное сопротивление стержня при этом становится малым, и двигатель работает с хор. КПД.
2. Логометрическнй измерительный механизм.
![]() Логометром наз. прибор, угол отклонения стрелки которого от отношения двух токов(рис.).
Логометром наз. прибор, угол отклонения стрелки которого от отношения двух токов(рис.).
Измерительный механизм магнитоэлектрического логометра конструктивно отличается от др. магнитоэлектрических ИМ тремя особенностями: 1) наличием двух жестко скрепленных между собой подвижных рамок; 2) отсутствием устройства для создания
противодействующего момента (пружинок); 3) неравномерностью магнитного поля, создаваемого постоянным магнитом в воздушном зазоре. Токи I1 и I2 в рамках подаются по безмоментным проводникам. В рамках создаются противонаправленные моменты: один из моментов поворачивает рамку в направлении увеличения угла отклонения а, назовем его вращающим моментом Мвр=C1*I1*B1(a); др. момент, направленный в обратную сторону, назовем противодействующим моментом Мпр=C2*I2*B2(a). Таким образом, в логометре противодействующий момент создается не механическим, а электрическим путем. При равновесии этих моментов Мвр=Мпр отношение токов I1/I2=C3*B2(a)/B1(a) или a=f(I1/I2). Угол поворота подвижной части логометра пропорционален отношению токов в катушках. Магнитоэлектрические логометры широко используют при измерении сопротивлений в омметрах и измерительных мостах.
Билет №14
1. Двигатель постоянного тока, параллельного и независимого возбуждения. Рабочие механические и регулировочные характеристики.
 В двигателях независимого возбуждения обмотка возбуждения 0В электрически не связана с обмоткой якоря (рис. 6.20, а). Обычно напряжение возбуждения Uв отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря (рис. 6.20, б). Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы, Эксплуатационные свойства двигателей постоянного тока определяются их рабочими и механическими характеристиками, а также регулировочными свойствами. Рабочие характеристики представляют собой зависимость частоты вращения n, тока Ia в обмотке якоря, полезного момента М2 от полезной мощности двигателя Р2 при неизменных значениях напряжения питания U и тока в обмотке возбуждения Iв (рис. 1). Характеристика n =f(Р2) имеет вид кривой, наклоненной к оси абсцисс. Такая
В двигателях независимого возбуждения обмотка возбуждения 0В электрически не связана с обмоткой якоря (рис. 6.20, а). Обычно напряжение возбуждения Uв отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря (рис. 6.20, б). Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы, Эксплуатационные свойства двигателей постоянного тока определяются их рабочими и механическими характеристиками, а также регулировочными свойствами. Рабочие характеристики представляют собой зависимость частоты вращения n, тока Ia в обмотке якоря, полезного момента М2 от полезной мощности двигателя Р2 при неизменных значениях напряжения питания U и тока в обмотке возбуждения Iв (рис. 1). Характеристика n =f(Р2) имеет вид кривой, наклоненной к оси абсцисс. Такая
форма характеристики объясняется тем, что с ростом нагрузки двигателя Р2 увеличивается ток якоря Iа, следовательно, возрастает падение напряжения в цепи якоря Ia*суммаr. В итоге уменьшается частота вращения. Одновременно с ростом нагрузки усиливается реакция якоря это

 уменьшает основной магнитный поток Ф, что способствует увеличению частоты вращения. График зависимости M2=f(P20) определяется выражением полезного момента (момента на валу), Нм, М2=Р2/wа=30Р2/(пи*n), где wa— угловая скорость якоря, 1/С. Если n=const. то график М2=f(P2) представляет собой прямую линию, выходящую из начала осей координат. Однако с ростом нагрузки двигателя частота вращения уменьшается, это приводит к нелинейности рассматриваемой характеристики. График зависимости Ia=f(P2) не выходит из начала осей координат, т.к. в режиме хх (Р2=0) двигатель потребляет из сети ток холостого хода Iо и развивает момент холостого хода Мо, обусловленный; механическими и магнитными потерями в двигателе Параметры двигателя, соответствующие номинальной мощности Рном, называют номинальными: nном, Iaном, М2ном. Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения якоря n от электромагнитного момента М при неизменных напряжении питания (U=const) и сопротивлении реостата в цепи возбуждения (rper=const). Получим n=U/(Ce*Ф)-(M*суммаr)/(Ce*Cn*Ф^2)=no-dn где nо — частота вращения двигателя при идеальном холостом ходе (М=0, Iа=0); dn— изменение частоты вращения якоря под действием нагрузки двигателя М=Мо+М2. Если пренебречь размагничивающим действием реакции якоря и принять Ф=const, то механическая характеристика двигателя независимого (параллельного) возбуждения примет вид прямой, наклоненной к оси абсцисс (рис. 6.22, а, график 1).
уменьшает основной магнитный поток Ф, что способствует увеличению частоты вращения. График зависимости M2=f(P20) определяется выражением полезного момента (момента на валу), Нм, М2=Р2/wа=30Р2/(пи*n), где wa— угловая скорость якоря, 1/С. Если n=const. то график М2=f(P2) представляет собой прямую линию, выходящую из начала осей координат. Однако с ростом нагрузки двигателя частота вращения уменьшается, это приводит к нелинейности рассматриваемой характеристики. График зависимости Ia=f(P2) не выходит из начала осей координат, т.к. в режиме хх (Р2=0) двигатель потребляет из сети ток холостого хода Iо и развивает момент холостого хода Мо, обусловленный; механическими и магнитными потерями в двигателе Параметры двигателя, соответствующие номинальной мощности Рном, называют номинальными: nном, Iaном, М2ном. Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения якоря n от электромагнитного момента М при неизменных напряжении питания (U=const) и сопротивлении реостата в цепи возбуждения (rper=const). Получим n=U/(Ce*Ф)-(M*суммаr)/(Ce*Cn*Ф^2)=no-dn где nо — частота вращения двигателя при идеальном холостом ходе (М=0, Iа=0); dn— изменение частоты вращения якоря под действием нагрузки двигателя М=Мо+М2. Если пренебречь размагничивающим действием реакции якоря и принять Ф=const, то механическая характеристика двигателя независимого (параллельного) возбуждения примет вид прямой, наклоненной к оси абсцисс (рис. 6.22, а, график 1).
 |
||
Эта характеристика называется естественной. Если в цепь якоря двигателя ввести добавочное сопротивление Rдоб (см. рис. 6.20), то механическая характеристика будет определяться выражением n=U/(Ce*Ф)-(M*суммаr+Rдоб)/(Ce*Cn*Ф^2), то
величина no не изменится, а dn возрастет, при этом угол наклона механической характеристики к оси абсцисс увеличится (рис. 6.22, а, графики 2 и 3). Полученные механические характеристики называют искусственными. Естественная характеристика двигателя независимого (параллельного) возбуждения, т. е. механическая характеристика, соответствующая Rдоб=0—«жесткая», так как при изменении нагрузки на валу двигателя частота вращения изменяется незначительно (на 5—10%). Искусственные характеристики двигателя с ростом добавочного сопротивления Rдоб в цепи якоря становятся «мягкими», так как изменение нагрузки на валу двигателя сопровождается значительными изменениями частоты вращения. На форму механических характеристик влияет основной магнитный поток Ф. При уменьшении Ф увеличивается частота вращения идеального холостого хода nо и dn. Это приводит к резкому изменению жесткости механической характеристики (рис. 6.22, б). При изменении напряжения на якоре двигате ля U изменяется частота вращения no, а dn остается постоянной. Следовательно, жесткость механических характеристик (если не учитывать реакцию якоря) не из меняется — они смещаются по высоте, оставаясь параллельными друг другу (рис. 6.22, в).
Регулирование частоты вращения двигателей независимого и параллельного возбуждения. Хорошие регулировочные свойства двигателей постоянного тока — одна из основных причин их применения в современном электроприводе, несмотря на существенные недостатки, обусловленные наличием у них щеточно-коллекторного узла. Лучшие регулировочные свойства у двигателей независимого и параллельного возбуждения. Регулирование частоты вращения изменением подводимого к обмотке якоря напряжения. Как следует из n=(U-Ia*суммаr)/(ce*Ф), с изменением напряжения U частота вращения изменяется. Так как превышение номинального напряжения недопустимо, то этот способ позволяет изменять частоты вращения только в сторону уменьшения от номинальной. В двигателях мощностью до 100—120 Вт напряжение, подводимое к обмотке якоря, можно изменять посредством потенциометра потери в котором вследствие небольшой передаваемой мощности невелики. Если питание двигателя осуществляется через автономные выпрямители (В1 — в цепи обмотки якоря и В2— в цепи обмотки возбуждения ОВ), то регулировать частоту вращения можно посредством автотрансформатора AT, на выход которого включен выпрямитель В1. При этом напряжение возбуждения остается неизменным. Этот способ регулирования частоты вращения успешно применяется при мощности двигателя до 500—600 Вт. Регулирование частоты вращения изменением добавочного сопротивления в цепи обмотки якоря. Этот способ регулирования также позволяет изменять частоту вращения только в сторону уменьшения от номинальной и осуществляется посредством реостата Rдоб (см. рис. 6.20). Недостатки рассматриваемого способа: значительные потери на нагрев реостата (Ia^2*Rдоб) — с изменением сопротивления доб меняется жесткость механических характеристик двигателя (см. рис. 6.22, a). Регулирование частоты вращения изменением магнитного потока возбуждения. Этот способ регулирования весьма экономичен, так как изменение магнитного потока осуществляется реостатом в цепи обмотки возбуждения, ток в которой у рассматриваемых двигателей в несколько раз меньше тока в цепи обмотки якоря. Способ позволяет изменять частоту вращения в сторону увеличения от номинальной. При увеличении сопротивления реостата rрег (см. рис. 6.20) уменьшается ток в обмотке возбуждения Iв, а следовательно, и магнитный поток Ф, что вызывает возрастание частоты вращения якоря двигателя. вращения может превышать максимальное значение. Недостаток данного способа регулирования состоит в том, что при изменении потока Ф в значительной степени меняется жесткость механических характеристик двигателя (см. рис. 6.22, б). Импульсное регулирование частоты вращения. Цепь обмотки якоря двигателя независимого возбуждения периодически подключается к источнику напряжения ключом К. При замыкании цепи якоря на время t1 к обмотке якоря подводится напряжение U=Uном, ток нарастает до значения Imax (рис. 6.25, б). При размыкании ключа ток уменьшается, достигая значения Imin, замыкаясь через диод VD. При следующем замыкании ключа К. ток в якоре вновь достигает значения Imax и т. д. Таким образом, к цепи обмотки якоря подводятся импульсы напряжения, амплитудное значение которых равно напряжению U источника. Среднее напряжение, прикладываемое к двигателю, В, Uср=Ut1/T=gU, где t1—длительность импульса напряжения; Т—время между двумя следующими друг за другом импульсам напряжения (рис. 6.25, б); g=t1/T— коэффициент управления. Ток в обмотке якоря определяется средним значение Iср=0,5(Imax+Imin). Частота вращения двигателя при импульсном регулировании n=(gU-Ia*суммаr)/(ce*Ф). Импульсное регулирование обеспечивает изменение частоты вращения лишь в сторону уменьшения от номинальной. Для снижения пульсаций тока в цепь якоря включают дроссель L. Частота работы ключа составляет 200—400 Гц. На рис. 6.25, в показана одна из возможных схем импульсного регулирования напряжения, где в качеств ключа используют тиристор VS. Включается тиристор (что соответствует замыканию ключа) подачей кратко временного импульса от генератора импульсов ГИ на управляющий электрод УЭ. Цепь из дросселя L1 и конденсатора С, шунтирующая тиристор, служит для выключения последнего в интервале между двумя управляющими импульсами. При включении тиристора конденсатор С перезаряжается по контуру С—VS—L1—С и к тиристору прикладывается напряжение, обратное напряжению сети. Время открытого состояния тиристора (с) определяется параметрами цепи L1С: t= p*sqrt(L1C), где L1 —индуктивность дросселя, Гн; С—емкость конденсатора, Ф. Среднее значение напряжения Uср, подводимого к обмотке якоря, регулируется изменением частоты следования управляющих импульсов. Частота вращения Д с постоянными магнитами регулируется изменением напряжения на обмотке якоря (реостатом Rдоб или импульсным методом) только в сторону уменьшения от номинального значения. Для изменения направления вращения якоря (реверса) Д необходимо изменить направление тока в обмотке якоря либо в ОВ. При одновременном изменении тока в обеих обмотках якорь не изменяет направления вращения. В Д с постоянными магнитами реверс осуществляется изменением полярности клемм обмотки якоря.
Электроизмерительные приборы с магнитоэлектрическим измерительным механизмом.
 Магнитоэлектрический механизм содержит постоянный магнит и катушку с током. Рассмотрим работу магнитоэлектрического измерительного механизма на примере конструкции с внутрирамочным магнитом(рис.).
Магнитоэлектрический механизм содержит постоянный магнит и катушку с током. Рассмотрим работу магнитоэлектрического измерительного механизма на примере конструкции с внутрирамочным магнитом(рис.).
Его магнитная система состоит из постоянного магнита 3 и замкнутого кольца 2 из магнитомягкого ферромагнитного материала. В рабочем зазоре между ними образуется радиальное магнитное поле. Подвижная катушка 1, выполненная из тонкого изолированного провода, намотанного на алюминиевый
каркас, помещена в рабочем зазоре и укреплена на растяжках. Она может свободно поворачиваться вокруг своей оси. Концы обмотки электрически соединены с растяжками, по которым ток поступает в катушку. При наличии в обмотке постоянного тока I на активную сторону витков w обмотки длиной l, находящуюся в равномерном магнитном поле зазора с магнитной индукцией В0, действует сила F, которая, согласно з-ну Ампера, равна F=B0*l*I*w. Под действием пары таких сил, действующих на обе активные стороны обмотки, создается вращающий момент Мвр= В0*l*b*w* I=B0*S*w*I=Y0*I. S – площадь обмотки, равная произведению длины l на ширину b; Y0=B0*S*w – постоянная прибора, равная максимальному потокосцеплению катушки. Из последнего выражения видно, что вращающий момент пропорционален току. Под действием Мвр подвижная часть механизма вместе с указателем поворачивается на некоторый угол α , который пропорционален току I: α=Si*I, где Si=Y0/k – чувствительность ИМ по току, величина постоянная, не зависящая от тока. Магнитоэлектрические приборы, в которых используются магнитоэлектрические механизмы, применяют для измерения постоянных токов и напряжений, а также в качестве измерителей сопротивления и гальванометров.
Билет №15
1. Сельсины и вращающиеся трансформаторы
 Сельсины (самосинхронизирующиеся) применяются для поворота или вращения 2 или нескольких осей, не связанных друг с другом механически, а также для некоторых других целей. Однофазные сельсины имеют следующее устройство. На явновыраженных полюсах статора расположена сосредоточенная ОВ, а в
Сельсины (самосинхронизирующиеся) применяются для поворота или вращения 2 или нескольких осей, не связанных друг с другом механически, а также для некоторых других целей. Однофазные сельсины имеют следующее устройство. На явновыраженных полюсах статора расположена сосредоточенная ОВ, а в
пазах цилиндрического ротора - 3 распределенные обмотки синхронизации, которые сдвинуты относительно друг друга в пространстве на 120 и вполне аналогичны 3-фазной обмотке нормальной МПерТ. Обмотки ротора соединяются с помощью контактных колец и щеток. Сердечники статора и ротора собраны из листовой эл-тех стали. Рассмотрим работу ОдСл. В индикаторном режиме работы один сельсин-датчик управляет работой одного или нескольких сельсинов-приемников. ОВ этих сельсинов включаются в общую сеть, а обмотки синхронизации соединяются друг с другом. Пульсирующее поле возбуждения индуктирует ЭДС в фазах обмоток синхронизации. Если углы поворота соответствующих фаз датчика bд и приемника bп по отношению к осям полюсов одинаковы, то ЭДС соединенных друг с другом фаз обмоток синхронизации также одинаковы и направлены встречно. При этом в обмотках синхронизации не возникает никаких токов и эл-маг моменты сельсинов =0. Если же роторы сельсинов будут занимать неодинаковое положение и поэтому угол рассогласования db=bд-bп будет не =0, то равенства ЭДС нарушатся, в обмотках синхронизации возникнут токи и на роторы сельсинов будут действовать эл-маг моменты Мд и Мп. Моменты датчика и приемника имеют разные знаки и оба действуют в направлении уменьшения угла рассогласования db. Если бы момент сопротивления на валу сельсина-приемника был =0, то db=0 и ротор этого сельсина в точности воспроизводил бы движение ротора сельсина-датчика, притом не только в режиме медленного поворота ротора, но и при его вращении с определенной скоростью. В действительности на ротор сельсина-приемника действуют определенные тормозные моменты. Это моменты от трения в подшипниках, на контактных кольцах и о воздух в сельсине, а также небольшой момент сопротивления механизма, соединенного с валом сельсина-приемника. Поэтому всегда возникает небольшая ошибка db в передаче угла. Бесконтактные сельсины имеют то преимущество, что отсутствие скользящих щеточных контактов увеличивает надежность работы сельсинов и уменьшает их погрешности ввиду уменьшения потерь на трение. В таких сельсинах обе обмотки размещаются на статоре, а ротор не имеет обмотки. Обмотки синхронизации этого сельсина располагаются на статоре, который по своей конструкции аналогичен статору АД. ОВ имеет вид кольцевых коаксиальных катушек, охватывающих ротор. Особенностью устройства ротора является то, что он имеет немагнитную часть, благодаря чему полюсы ротора в магнитном отношении разделены и поток Ф направляется из одного полюса через неподвижный внешний магнитопровод в другой полюс и через ротор в статор. В результате этого при неподвижной обмотке возбуждения удается получить в воздушном зазоре между ротором и статором м.поле такого же вида, как и в обычном сельсине. рансформаторы (ВТ) предназначены для получения переменного напряжения, зависящего от угла поворота ротора. По назначению ВТ относятся к информационным электрическим машинам и применяются в системах автоматического регулирования в качестве измерительных элементов (датчиков угла) для измерения рассогласования между двумя вращающимися осями. В вычислительных устройствах вращающиеся трансформаторы используют при решении различных математических задач, связанных с построением треугольников, преобразованием координат, сложением и разложением векторов и т.п. Вращающийся трансформатор конструктивно представляет собой электрическую
 машину индукционного типа малой мощности. Наибольшее применение получили двухполюсные ВТ с двумя парами одинаковых взаимно перпендикулярных обмоток: обмотки w1 и Wк (С 1— С2 и СЗ— С4) расположены на статоре; обмотки w2 и w3 (PI — Р2 и РЗ— Р4)— на роторе. Обмотка возбуждения (С1—С2) включается в сеть переменного тока, компенсационная обмотка СЗ
машину индукционного типа малой мощности. Наибольшее применение получили двухполюсные ВТ с двумя парами одинаковых взаимно перпендикулярных обмоток: обмотки w1 и Wк (С 1— С2 и СЗ— С4) расположены на статоре; обмотки w2 и w3 (PI — Р2 и РЗ— Р4)— на роторе. Обмотка возбуждения (С1—С2) включается в сеть переменного тока, компенсационная обмотка СЗ
— С4 замыкается накоротко или на резистор. Обмотки на роторе называются вторичными: синусной P1—Р2 и косинусной РЗ— Р4. Электрический контакт с обмотками ротора осуществляется с помощью контактных колец и щеток (аналогично контактным сельсинам) либо посредством спиральных пружин, если ВТ работает в режиме ограниченного угла поворота. В последнем случае угол поворота ротора ВТ ограничивается максимальным углом закручивания спиральных пружин. Принцип работы вращающихся трансформаторов основан на взаимной индуктивности между обмотками статора и ротора, которая изменяется в определенной функциональной зависимости от угла поворота ротора. Электродвижущие силы, наводимые пульсирующим магнитным потоком возбуждения в обмотках ротора, строго следуют этой зависимости. Если ВТ используется в качестве измерительного элемента, то поворот ротора осуществляется посредством редукторного механизма высокой точности, который либо встраивается в корпус ВТ, либо монтируется отдельно от ВТ и соединяется с его валом. Если ВТ предназначен для работы в режиме поворота ротора в пределах определенного угла, то в качестве обмоток возбуждения и компенсационной используются обмотки статора, а в качестве вторичных — обмотки ротора. Если ВТ работает в режиме непрерывного вращения ротора, то обычно применяют «обратное» использование обмоток: обмотки ротора используют в качестве обмоток возбуждения и компенсационной, а обмотки статора — в качестве вторичных. Если компенсационная обмотка замыкается накоротко, то при «обратном» использовании обмоток на роторе применяют лишь два контактных' кольца, что упрощает конструкцию, повышает надежность и точность ВТ. В зависимости от графика функциональной зависимости ЭДС вторичной обмотки от угла поворота ротора вращающиеся трансформаторы разделяют на следующие типы: синусно-косинусный вращающийся трансформатор (СКВТ) - у него возникают напряжение U 2 на выходе обмотки w 2, находящееся в синусной зави симости от угла по ворота ротора альфа и напряжение U3, на выходе обмотки w3 находящееся в косинусной зависимости от угла поворота ротора альфа. Линейный вращающийся трансформа тор (ЛВТ) — у него выходное напряжение U2 находится в прямолинейной зависимости от угла а. Вращающийся трансформатор — построитель (ПВТ)—предназначен для решения геометрических задач. Кроме того, вращающиеся трансформаторы могу применяться в качестве масштабных трансформаторов (МВТ) для согласования напряжений отдельных каскадов автоматического устройства, фазовращателей, электрических машин синхронной связи трансформаторных системах дистанционной передач угла. В корпусе расположен шихтованный сердечник статора 2, в пазы которого уложены распре ротора 4 также находятся распределенные обмотки 5. Электрический контакт обмоток ротора с выводными клеммами 6 осуществляется посредством щеток 7 и контактных колец 8.
2.Процесс самовозбуждения генератора постоянного тока.
Обмотка возбуждения подсоединена через регулировочный реостат параллельно нагрузке. Следовательно, в данном случае используется принцип самовозбуждения
, при котором обмотка возбуждения получает питание от обмотки якоря генератора. Самовозбуждение генератора возможно только при выполнении определённых условий. Чтобы установить их рассмотрим процесс изменения тока в контуре “обмотка возбуждения - обмотка якоря” в режиме хх. Получим уравнение e
=
i
в
S
R
в +
L
в
di
в/
dt
(1)
, где е и iв – мгновенные значения ЭДС в обмотке якоря и тока возбуждения; SRв =Rв + Rр.в.- суммарное сопротивление цепи возбуждения генератора (сопротивлением SRа можно пренебречь, т.к. оно значительно меньше SRв); Lв- суммарная индуктивность обмоток возбуждения и якоря. Все члены уравнения (1) можно изобразить графически (рис1). 
ЭДС е при некотором значении iв тока возбуждения можно определить по характеристике ОА хх, а падение напряжения iвSRв – по ВАХ ОВ его цепи возбуждения. Характеристика ОВ представляет собой прямую, проходящую через начало координат под углом g к оси абсцисс; при этом tgg=SRв. Из (1) имеем di в/ dt = ( e - i в S R в) / L в (2). Следовательно, если разность (e - iвSRв) > 0, то производная diв/dt>0, и происходит процесс увеличения тока возбуждения iв. Установившийся режим в цепи обмотки возбуждения наблюдается при diв/dt = 0, т.е. в точке пересечения С характеристики хх ОА с прямой ОВ. При этом машина работает с некоторым установившимся током возбуждения Iвo и ЭДС Еo=Uо. Из уравнения (2) следует, что для самовозбуждения генератора необходимо выполнение определённых условий:
1) Процесс самовозбуждения может начаться только в случае, если в начальный момент (iв=0) в обмотке якоря индуцируется некоторая начальная ЭДС. Такая ЭДС может быть создана потоком остаточного магнетизма, поэтому для начала процесса самовозбуждения необходимо, чтобы в генераторе имелся поток остаточного магнетизма , который при вращении якоря индуцирует его в обмотке ЭДС Еост. Обычно поток статического магнетизма имеется в машине из-за наличия гистерезиса в её магнитной системе. Если такой поток отсутствует, то его создают, пропуская через обмотку возбуждения ток от постороннего источника; 2) При прохождении тока iв по обмотке возбуждения в её МДС Fв должна быть направлена согласно МДС остаточного магнетизма F ост. В этом случае под действием разности е – iвSRв происходит процесс нарастания тока iв , магнитного потока возбуждения Фв и ЭДС e. Если указанные МДС направлены встречно, то МДС обмотки возбуждения создаёт поток, направленный против потока остаточного магнетизма, машина размагничивается и процесс самовозбуждения не сможет начаться; 3) Положительная разность е – iвSRв необходимая для возрастания тока возбуждения iв от 0 до установившегося значения Iвo, может возникать только в том случае, если в указанном диапазоне изменения тока iв прямая ОВ располагается ниже хар-ки хх ОА. При увеличения сопротивления цепи возбуждения SRв возрастает угол наклона g прямой ОВ к оси тока Iв и при некотором критическом значении угла gкр прямая ОВ практически совпадает с прямолинейной частью хар-ки хх. В этом случае е »iвSRв и процесс самовозбуждения становится невозможным. Следовательно, для самовозбуждения генератора необходимо, чтобы сопротивление цепи возбуждения было меньше критического значения. Если параметры цепи возбуждения подобраны так, что SRв < SRвкр, то в точке С обеспечивается устойчивость режима самовозбуждения. При случайном уменьшении тока iв ниже установившегося значения Iво или увеличение его свыше Iво возникает соответственно положительная или отрицательная разность (е – iвSRв), стремящаяся изменить ток iв так, чтобы он снова стал равным Iво. Однако при SRв > SRвкр устойчивость режима самовозбуждения нарушается. Если в процессе работы генератора увеличить сопротивление цепи возбуждения SRв до значения, большего SRвкр, то его магнитная система размагничивается и ЭДС уменьшается до Еост. Если генератор начал работать при SRв > SRвкр то он не сможет самовозбудиться. Следовательно, условие SRв < SRвкр ограничивает возможный диапазон регулирования тока возбуждения генератора и его напряжения . Обычно можно уменьшать напряжение генератора, увеличивая сопротивление SRв, лишь до (0,6…0,7)Uном.
Билет №16
1. Частота вращения двигателя постоянного тока. Способы регулирования частоты вращения.
Регулирование частоты вращения двигателей независимого и параллельного возбуждения. Хорошие регулировочные свойства двигателей постоянного тока — одна из основных причин их применения в современном электроприводе, несмотря на существенные недостатки, обусловленные наличием у них щеточно-коллекторного узла. Лучшие регулировочные свойства у двигателей независимого и параллельного возбуждения. Регулирование частоты вращения изменением подводимого к обмотке якоря напряжения. Как следует из n=(U-Ia*суммаr)/(ce*Ф), с изменением напряжения U частота вращения изменяется. Так как превышение номинального напряжения недопустимо, то этот способ позволяет изменять частоты вращения только в сторону уменьшения от номинальной. В двигателях мощностью до 100—120 Вт напряжение, подводимое к обмотке якоря, можно изменять посредством потенциометра потери в котором вследствие небольшой передаваемой мощности невелики. Если питание двигателя осуществляется через автономные выпрямители (В1 — в цепи обмотки якоря и В2— в цепи обмотки возбуждения ОВ), то регулировать частоту вращения можно посредством автотрансформатора AT, на выход которого включен выпрямитель В1. При этом напряжение возбуждения остается неизменным. Этот способ регулирования частоты вращения успешно применяется при мощности двигателя до 500—600 Вт. Регулирование частоты вращения изменением добавочного сопротивления в цепи обмотки якоря. Этот способ регулирования также позволяет изменять частоту вращения только в сторону уменьшения от номинальной и осуществляется посредством реостата Rдоб (см. рис. 6.20). Недостатки рассматриваемого способа: значительные потери на нагрев реостата (Ia^2*Rдоб) — с изменением сопротивления доб меняется жесткость механических характеристик двигателя (см. рис. 6.22, a). Регулирование частоты вращения изменением магнитного потока возбуждения. Этот способ регулирования весьма экономичен, так как изменение магнитного потока осуществляется реостатом в цепи обмотки возбуждения, ток в которой у рассматриваемых двигателей в несколько раз меньше тока в цепи обмотки якоря. Способ позволяет изменять частоту вращения в сторону увеличения от номинальной. При увеличении сопротивления реостата rрег (см. рис. 6.20) уменьшается ток в обмотке возбуждения Iв, а следовательно, и магнитный поток Ф, что вызывает возрастание частоты вращения якоря двигателя. вращения может превышать максимальное значение. Недостаток данного способа регулирования состоит в том, что при изменении потока Ф в значительной степени меняется жесткость механических характеристик двигателя (см. рис. 6.22, б). Импульсное регулирование частоты вращения. Цепь обмотки якоря двигателя независимого возбуждения периодически подключается к источнику напряжения ключом К. При замыкании цепи якоря на время t1 к обмотке якоря подводится напряжение U=Uном, ток нарастает до значения Imax (рис. 6.25, б). При размыкании ключа ток уменьшается, достигая значения Imin, замыкаясь через диод VD. При следующем замыкании ключа К. ток в якоре вновь достигает значения Imax и т. д. Таким образом, к цепи обмотки якоря подводятся импульсы напряжения, амплитудное значение которых равно напряжению U источника. Среднее напряжение, прикладываемое к двигателю, В, Uср=Ut1/T=gU, где t1—длительность импульса напряжения; Т—время между двумя следующими друг за другом импульсам напряжения (рис. 6.25, б); g=t1/T— коэффициент управления. Ток в обмотке якоря определяется средним значение Iср=0,5(Imax+Imin). Частота вращения двигателя при импульсном регулировании n=(gU-Ia*суммаr)/(ce*Ф). Импульсное регулирование обеспечивает изменение частоты вращения лишь в сторону уменьшения от номинальной. Для снижения пульсаций тока в цепь якоря включают дроссель L. Частота работы ключа составляет 200—400 Гц. На рис. 6.25, в показана одна из возможных схем импульсного регулирования напряжения, где в качеств ключа используют тиристор VS. Включается тиристор (что соответствует замыканию ключа) подачей кратковременного импульса от генератора импульсов ГИ на управляющий электрод УЭ. Цепь из дросселя L1 и конденсатора С, шунтирующая тиристор, служит для выключения последнего в интервале между двумя управляющими импульсами. При включении тиристора конденсатор С перезаряжается по контуру С—VS—L1—С и к тиристору прикладывается напряжение, обратное напряжению сети. Время открытого состояния тиристора (с) определяется параметрами цепи L1С: t=p*sqrt(L1C), где L1 —индуктивность дросселя, Гн; С—емкость конденсатора, Ф. Среднее значение напряжения Uср, подводимого к обмотке якоря, регулируется изменением частоты следования управляющих импульсов. Частота вращения Д с постоянными магнитами регулируется изменением напряжения на обмотке якоря (реостатом Rдоб или импульсным методом) только в сторону уменьшения от номинального значения. Для изменения направления вращения якоря (реверса) Д необходимо изменить направление тока в обмотке якоря либо в ОВ. При одновременном изменении тока в обеих обмотках якорь не изменяет направления вращения. В Д с постоянными магнитами реверс осуществляется изменением полярности клемм обмотки якоря.
2. Измерительные трансформаторы.
![]() Измерительные трансформаторы. Применяют для расширения пределов измерения измерительных приборов переменного тока. Кроме того, они позволяют полностью изолировать эти приборы от цепи высокого напряжения, в которой производится измерение. Первичную обмотку измерительных трансформаторов включают в сеть, а ко вторичной обмотке подключают измерительные приборы. В сетях высокого напряжения один конец вторичных обмоток и стальные кожухи измерительных трансформаторов заземляют. Измерительные трансформаторы подразделяют на трансформаторы напряжения и трансформаторы тока. Трансформаторы напряжения используют для включения вольтметров и параллельных цепей измерительных приборов – ваттметров, счетчиков, фазометров и т. д. Трансформаторы тока применяют для включения амперметров и последовательных цепей других измерительных приборов. Маркировка зажимов трансформатора напряжения аналогична маркировке силовых трансформаторов. Трансформаторы тока маркируются иначе – зажимы первичной обмотки, включаемой последовательно в линию, обозначают буквами Л1 и Л2, а соответствующие зажимы вторичной обмотки – буквами И1 и И2. Маркировка зажимов измерительных трансформаторов дает возможность правильно включать «полярные» приборы. Измерительные приборы, работающие в комплекте с определенными измерительными трансформаторами, градуируют непосредственно в единицах измеряемых величин. В этом случае на шкале амперметра делают надпись «С тр. Тока I1/I2», а на шкале вольтметра - «С тр. напряжения U1/U2». Трансформаторы напряжения работают в режиме, близком к холостому ходу. Отличной особенностью работы трансформатора тока является последовательное соединение его первичной обмотки с потребителями энергии: значение первичного тока определяется I1 определяется только током потребителя. В номинальном режиме напряжение на зажимах вторичной обмотки трансформатора тока составляет несколько вольт ввиду малости сопротивлений последовательных цепей измерительных приборов. Этот режим близок к короткому замыканию. Пример включения измерительных приборов совместно с измерительными трансформаторами представлен на рисунке
Измерительные трансформаторы. Применяют для расширения пределов измерения измерительных приборов переменного тока. Кроме того, они позволяют полностью изолировать эти приборы от цепи высокого напряжения, в которой производится измерение. Первичную обмотку измерительных трансформаторов включают в сеть, а ко вторичной обмотке подключают измерительные приборы. В сетях высокого напряжения один конец вторичных обмоток и стальные кожухи измерительных трансформаторов заземляют. Измерительные трансформаторы подразделяют на трансформаторы напряжения и трансформаторы тока. Трансформаторы напряжения используют для включения вольтметров и параллельных цепей измерительных приборов – ваттметров, счетчиков, фазометров и т. д. Трансформаторы тока применяют для включения амперметров и последовательных цепей других измерительных приборов. Маркировка зажимов трансформатора напряжения аналогична маркировке силовых трансформаторов. Трансформаторы тока маркируются иначе – зажимы первичной обмотки, включаемой последовательно в линию, обозначают буквами Л1 и Л2, а соответствующие зажимы вторичной обмотки – буквами И1 и И2. Маркировка зажимов измерительных трансформаторов дает возможность правильно включать «полярные» приборы. Измерительные приборы, работающие в комплекте с определенными измерительными трансформаторами, градуируют непосредственно в единицах измеряемых величин. В этом случае на шкале амперметра делают надпись «С тр. Тока I1/I2», а на шкале вольтметра - «С тр. напряжения U1/U2». Трансформаторы напряжения работают в режиме, близком к холостому ходу. Отличной особенностью работы трансформатора тока является последовательное соединение его первичной обмотки с потребителями энергии: значение первичного тока определяется I1 определяется только током потребителя. В номинальном режиме напряжение на зажимах вторичной обмотки трансформатора тока составляет несколько вольт ввиду малости сопротивлений последовательных цепей измерительных приборов. Этот режим близок к короткому замыканию. Пример включения измерительных приборов совместно с измерительными трансформаторами представлен на рисунке
Билет №17
1. Механическая характеристика асинхронного двигателя. Естественная и искусственная характеристики.
Графическая зависимость М=f(s) представляет собой механическую хар-ку асинхронного двигателя
 |
Естественной мех-ой хар-ой называется харак-ра полученная для номинальных паспортных данных. Под искуственной механ хар-ой понимают хар-ку полученную при изменении хотя бы одного параметра двигателя. Анализ механ-ой хар-ки показывает что при включении двигателя в сеть, когда вращающееся поле имеет частоту вращения n1, а ротор еще неподвижен (n2=0, s=1), на роторе создается начальный пусковой момент Мп, выражение для которого получим при s=1: Мп=(m1pU2 1 r’2 )/(2пf1[(r1+ r’2 )2 + (x1+ x’2 )2 ] ). Под действием момента понимают Мп ротор двигателя приводится во вращение, при этом скольжение уменьшается,а вращающий момент увеличивается. При критическом скольжении Sкр момент достигает максимального значения. Критическое скольжение Sкр пропорционально активному сопротивлению обмоток. После достижения моментом значения Mmax частота вращения ротора продолжает увеличиваться, а момент уменьшаться. Так продолжается пока электромаг момент не станет равным сумме противодействующих моментов. Из анализа механ хар-ки след что устойчивая работа АД будет при скольжениях S<Sкр т.е на участке ОА механ хар-ки где изменение нагрузки на валу двигателя сопровождаются соотв-ми изменениями электромагнитного момента. Увеличиваясь частота n2 вращения ротора начнет уменьшаться что приведет к уменьшению электромагнитного момента и изменение n2 прекратится. Этому соотв-ет точка С.
2. Опытное определение параметров схемы замещения трансформатора.
Привенный трансформатор (т-ф).
В общем случае параметры первичной и вторичной обмоток м-т значиительно отличатся друг от друга. Эта разница тем >, чем > коэф-нт трансформации т-ф. Это затрудняет расчёт и анализ работы т-ф. Устраняется это путёь приведения всех прараметров т-ф к одинаковому числу витков, напр. К числу витков w1, т. обр. вместо реального т-ф, у кот коэф-т т-ф определён как n=w2/w1 получим эквив. Т-ф с коэф-том n=w2/w1=1 Такой т-ф наз. приведённым, при этом имеется ввиду, что приведение вторичных параметров не должно отразится на энергетических показателей т-ф, т. е. Все мощности и фазовые сдвиги во вторичной обмотке приведённого т-ф д-ны остаться такими же, какими они были до приведения.
Напр. млекромагн. мощн. т-ф
E2*I2=E2’*I2’ I2’= I2*w2/w1 E2’= E2*n
Аналогично: U2*I2= U2’*I2’ U2’= U2*n
(I2*I2)*R2=(I2’*I2’)*R2’ следов. R2’= R2*n*n
из равенства реактивных потерь: (I2*I2)*X2=(I2’*I2’)*x2’ X2’= X2*n*n
Z2’= R2’+j* X2’
Z2’=Z2*n*n Zн’=Zн*n*n
Для приведённого т-ф м-но записать сист. урав.
1 U1 =-E1 +I1 *R1+I1 *j*X1
2 U2’ =E2’ -I2’ *R2’-I2’ *j*X2’
3 I1 =I0 +(-I2’ )
Эти уравнения б-т соотв след. эквив. схеме:
 Электрическая схема замещения приведённого т-ф.
Электрическая схема замещения приведённого т-ф.
Для облегчения исследования трансформатора и их рассчётов примен. также схему замещения приведённого т-ф. Рассмотим эквивал. Схему приведённого т-ф. В этой схеме сопр. Обмоток R1,X1,R2’,X2’ показаны вынесенными за саму обмотку и включены последовательно, причём n’=1 след. что потенциал т-к А и а и т-к Х и х соотв. Равны между собой, т.к. ЭДС Е1 =Е2’ Это позвол. Нам элекрически соеденить эти т-ки
И заменяем магнитную связь т-ф электич. цепью.
 Т – обарзная схема замещения приведённого т-ф
Т – обарзная схема замещения приведённого т-ф
Эта схема имеет электрическую ветвь R0, X0 заменяющая магн. цепь т-ф. Она полностью соотв. Ур-ям электрич. сост. т-ф.
Схема вкл. след. ветви:
первичная ветвь с сопр. Z1 =R1+j*X1
намагн. ветвь с сопр. Z0 =R0+j*X0
вторичная ветвь Z 2’ =R2’+j*X2’
и сопр. нагрузки Z н’ =Rн’+/-j*Xн’
(+/-) – плюс- минус
Изменяя сопр. нагрузки Zн’ м-но воспроизвести все режимы работы т-ф. Параметры намагн. ветви (R0,X0) определяются из опыта ХХ, причём активное сопр. R0 обусл. наличием магн. потерь. Все другие параметры т-ф явл. постоянными и м-т б. определены из опытов ХХ и КЗ
Билет №18
1. Пуск двигателей постоянного тока. Пусковые характеристики.
Ток в цепи якоря двигателя определяется выражением Ia=(U-Ea)/суммаr. При включении двигателя в сеть в начальный момент времени частота вращения n=0, поэтому противо-ЭДС Еа=0. Начальный пусковой ток в цепи якоря Iп=U/суммаr. Так как сопротивление обмоток в цепи якоря обычно невелико, то начальный пусковой ток Iп достигает больших значений по сравнению с номинальным током двигателя (Iп/Iном=3—15). Меньшая кратность пускового тока относится к двигателям малой мощности (до 600— 1000 Вт), большая—к двигателям средней и большой мощности. Бросок начального пускового тока в двигателях малой мощности не вызывает опасных последствий, так как кратность тока сравнительно невелика, продолжительность процесса пуска небольшая. Последнее объясняется малыми значениями моментов инерции вращающихся масс якоря и связанного с ним рабочего механизма. Поэтому двигатели малой мощности пускают в ход непосредственным включением в сеть. У двигателей большей мощности кратность пускового тока гораздо больше, время разгона якоря продолжительнее (из-за повышенного значения момента инерции вращающихся масс якоря и рабочего механизма). Большая кратность пускового тока вызывает интенсивное искрение на коллекторе. Значительный пусковой ток может привести к резкому падению напряжения в питающей сети (если мощность сети недостаточна), что неблагоприятно отразится на работе других потребителей, включенных в эту сеть. Поэтому при пуске двигателей мощностью более 1 кВт принимают меры для ограничения пускового тока: обычно это пусковые реостаты ПР, включенные последовательно в цепь якоря двигателя. Реостат ПР представляет собой добавочный резистор. Наибольшее применение получили трехзажимные пусковые реостаты рис. 6.19,
которые имеют шесть контактов. Медная шина Ш соединена с зажимом М, к которому подключают обмотку возбуждения. Благодаря шине Ш напряжение на обмотке возбуждения не зависит от положения рычага Р. Рычаг связан с плюсовым выводом источника питания, имеет скользящий контакт с шиной Ш, так что положение рычага на любом из контактов от 1 до 5 не влияет на ток возбуждения. Перед пуском двигателя рычаг Р устанавливают на контакте 0, включают рубильники и переводят рычаг на контакт 1. Цепь якоря через наибольшее сопротивление пускового реостата rпр=r1+r2+r3+r4 подключается к источнику. Одновременно в обмотке возбуждения появляется ток, и двигатель под действием пускового момента приводится во вращение. Начальный пусковой ток, А, Iп=U/(суммаr+rпр). Сопротивление гпр подбирают таким, чтобы кратность начального пускового тока не превышала 2—4. По мере разгона якоря увеличивается противо-ЭДС Еа и уменьшается ток в цепи якоря. Для обеспечения эффективности пуска рычаг Р постепенно переводят на контакты 2, 3, 4 и, наконец, 5, т. е. уменьшают сопротивление ПР до rпр=0. Рычаг Р следует перемещать медленно, чтобы не вызвать чрезмерного увеличения пускового тока. Однако и длительная задержка рычага на промежуточных контактах может вызвать перегорание какого-либо из сопротивлений r1-r4, рассчитанных на кратковременное протекание тока. В двигателях независимого и последовательного возбуждения при включении ПР используют только две клеммы: Л и Я. Так как вращающий момент двигателя М прямо пропорционален магнитному потоку Ф, то для облегчения пуска в цепи возбуждения двигателей независимого и параллельного возбуждения следует полностью вывести реостат (rрег=0). Поток возбуждения в этом случае приобретает наибольшее значение, и двигатель развивает необходимый пусковой момент. Пусковые характеристики определяют работу Д от включения до перехода к установившемуся режиму работы. Они оценивают кратность пускового тока Iп/Iн, кратность пускового момента Мп/Мн, времени пуска и экономичностью пусковой операции. Рабочие и механические характеристики определяют зависимость скорости вращения n, полезного момента М, тока I и КПД от полезной мощности Д Р при U=Uн=const, Rp=const и при отсутствии добавочных сопротивлений в цепи якоря. Механические характеристики представляют собой зависимость n=f(M) при U=const, Rp=const, Rдоб=const. Регулировочные характеристики определяются характером (плавный или ступенчатый), пределами и экономичностью регулирования. РХ называют зависимость скорости вращения Д от напряжения, подведенного к якорю при неизменном вращающем моменте. Они изображаются в координатах n=f(U) или w=f(U).
 2. Изменение вторичного напряжения трансформатора. Внешняя характеристика трансформатора.
Из уравнения напряжений для вторичной обмотки трансформатора следует, что с изменением тока нагрузкиI2 напряжение на выходе трансформатора U2 также изменяется, что обусловлено главным образом изменениями падений напряжения jI2x2 и I2r2. Изменение вторичного напряжения U2 при переходе трансформатора от режима холостого хода к режиму нагрузки выражают в процентах от номинального напряжения, за которое в трансформаторе принимают напряжение холостого хода U20. dU%=(U20-U2)*100/U20. С точностью, достаточной для практических расчетов, dU% представим в виде dU% = b(uкa*cosj2+uкр*sinj2), где uка=uk*cosjк — активная составляющая напряжения короткого замыкания; ukр=uк*sinjк — реактивная составляющая напряжения короткого замыкания; j2 — угол сдвига фаз между током нагрузки I2 и напряжением U2. Изменение вторичного напряжения зависит не только от величины нагрузки b, но и от ее характера т. е. коэффициента мощности cosj2. Зависимость напряжения на выходе трансформатора от тока нагрузки U2=f(I2), представленная графически, называется внешней характеристикой трансформатора (рис. 1.6).
2. Изменение вторичного напряжения трансформатора. Внешняя характеристика трансформатора.
Из уравнения напряжений для вторичной обмотки трансформатора следует, что с изменением тока нагрузкиI2 напряжение на выходе трансформатора U2 также изменяется, что обусловлено главным образом изменениями падений напряжения jI2x2 и I2r2. Изменение вторичного напряжения U2 при переходе трансформатора от режима холостого хода к режиму нагрузки выражают в процентах от номинального напряжения, за которое в трансформаторе принимают напряжение холостого хода U20. dU%=(U20-U2)*100/U20. С точностью, достаточной для практических расчетов, dU% представим в виде dU% = b(uкa*cosj2+uкр*sinj2), где uка=uk*cosjк — активная составляющая напряжения короткого замыкания; ukр=uк*sinjк — реактивная составляющая напряжения короткого замыкания; j2 — угол сдвига фаз между током нагрузки I2 и напряжением U2. Изменение вторичного напряжения зависит не только от величины нагрузки b, но и от ее характера т. е. коэффициента мощности cosj2. Зависимость напряжения на выходе трансформатора от тока нагрузки U2=f(I2), представленная графически, называется внешней характеристикой трансформатора (рис. 1.6).
Для построения этой характеристики воспользуемся формулой U2*=1-10^-2*dU% или U2=1— b10^-2(uкa*cosj2+uкр*sinj2), где U2*=U2/U20 — напряжение на выходе трансформа тора в относительных единицах. При изменениях нагрузки в
пределах номинальной (b<=1) внешние характеристики трансформатора прямолинейны. При чисто активной нагрузке (созj2=1) внешняя характеристика слабо наклонена к оси абсцисс, при активно-реактивной нагрузке (cos j2 < 1) наклон внешней характеристики увеличивается.
Билет№19
1.Построение механической характеристики асинхронного двигателя по паспортным данным.
На практике широко используют приближенное аналитическое выражение механической характеристики. Электромагнитный момент асинхронного двигателя М=DРэл2/(w1*s)= m2*I2^2*R2/(w1*s)=m2*s*E2^2*R2/(w1(R2^2+s^2*X2^2). Принимая приближенно E2=const, т. е. считая, что магнитный поток машины при изменении нагрузки не меняется, и приравнивая нулю производную dM/ds, можно найти критическое скольжение, соответствующее максимальному моменту: sкр=±R2/X2,(*) и соответственно максимальный момент Ммакс = ± m2*Е^2/(2w1*X2). после преобразования получим М/Ммакс=2/(sкр/s+s/sкр) (**). Формула (*) является приближенной и, конечно, дает погрешность, так как не учитывает падение напряжения в обмотках статора особенно велика погрешность при переходе из двигательного режима в генераторный, где разница в моментах может достигать трехкратной. Однако для исследования одного режима выведенная формула дает приемлемую точность. Объясняется это тем, что в области малых скольжений от s= 0 до sкp магнитный поток изменяется незначительно и следовательно, в этой области формула не может дать большой погрешности, тем более, что точки при s=О и sкр являются фиксированными. При скольжениях, близких к единице, формула (**) казалось бы должна давать завышенные значения момента, так как при больших токах сильнее сказывается падение напряжения в статоре. В реальных машинах при скольженьях, близких к единице, уменьшается сопротивление Х2 из-за явления вытеснения тока в проводниках ротора, что ведет к увеличению момента. В результате оказывается, что погрешность, обусловленная пренебрежением падения напряжения в статоре, и погрешность, вызванная изменением параметров ротора, взаимно противоположны, вследствие чего точность приближенной формулы (**) достаточна для практических целей.
2. Электроизмерительные приборы индукционной системы.
Индукционный механизм состоит из двух неподвижных магнитопроводов Эu и Эi с обмотками и неподвижного алюминиевого диска Д, укрепленного на оси. Магнитные потоки Фu(t)=k1*iu=k1*Imu*sinwt и Фi(t)= k2*i= k2*Im*sin(wt-Y) создаваемые синусоидальными токами iu, i и пронизывающие диск, смещены в пространстве. При этих условиях в диске образуется стоячая волна магнитного поля, одна из составляющих которой создает бегущее магнитное поле, под влиянием которого диск приходит во вращение. Средний вращающий момент Mвр.ср.=1/T*òT 0 k*iu*i dt=k3*w*Iu*I*sinY. Вращающий момент относительно оси диска пропорционален частоте, произведению действующих значений токов и косинусу угла сдвига – фаз между токами I, Iu. Магнитный поток ФL не пронизывает диск и служит для получения необходимого сдвига фаз напряжения U и магнитного потока Фu. Тормозной момент Mт создается с помощью постоянного магнита ПМ, который охватывает край диска. При вращении диск пересекает магнитные линии и в силу закона Ленца в нем наводятся вихревые токи, стремящиеся препятствовать движению диска. Тормозной момент пропорционален скорости вращения диска: Mт=kт*da/dt. При равенстве вращающего и тормозного моментов диск вращается равномерно с угловой скоростью W=da/dt=k3/kт*Iu*I*siny. Индукционные приборы используют главным образом в качестве однофазных и трехфазных счетчиков количества энергии переменного тока.
 |
Билет №20
1. Двигатели постоянного тока с последовательным и смешанным возбуждение; Характеристики,
 Схема двигателя последовательного возбуждения приведена на рис а.
Схема двигателя последовательного возбуждения приведена на рис а.
В этом двигателе ток якоря и ток возбуждения один и тот же. Ток якоря электродвигателя зависит от нагрузки на валу. Поэтому с изменением нагрузки в двигателе изменяются магнитные потоки полюсов, а следоват., скорость.
![]() Механическая хар-ка двигателя «мягкая» (рис ).
Механическая хар-ка двигателя «мягкая» (рис ).
При нагрузках, близких к номинальной, магнитная система двигателя насыщается, Ф=const и гипербола переходит в наклонную прямую.Пусковой момент при безреостатном пуске и номинальном напряжении был бы очень велик.
При пуске с реостатом Rп, ограничивающим пусковой ток и момент до допустимых значений Iп и Мп, пусковая характеристика( кривая 2 на рис) несколько опускается. Пуск двигателя без нагрузки недопустим, т.к. это приводит к аварии- скорость якоря двигателя превышает допустимую( двигатель идет «вразнос»). Регулирование частоты вращения двигателей последовательного возбуждения производят 3-мя способами.1)Реостатное регулирование (Rд)в цепи рабочего тока дает снижение скорости; неэкономично.2)Безреостатное ступенчатое изменение напряжения на тяговых двигателях электротранспорта достигается групповым параллельным или последовательным подключением их к сети.3)Полюсное рег-е в двигателе послед. возбужд. Осущ-ся шунтированием обмотки возбуждения реостатом (РВ см. рис а). Ум. тока возбуждения приводит к увеличению скорости при небольших нагрузках. Схема двигателя смешанного возбуждения приведена на (рис б)
 На каждом полюсе такого двигателя имеются по две катушки: одна принадлежит параллельной, другая последовательной обмотке. В этих двигателях последовательную обмотку вкл. в цепь тока якоря сокласно с параллельной, т.е. так, что создаваемые ими маг. потоки Ф1(I) и Ф2=const оказываются направленными одинаково и склад.
На каждом полюсе такого двигателя имеются по две катушки: одна принадлежит параллельной, другая последовательной обмотке. В этих двигателях последовательную обмотку вкл. в цепь тока якоря сокласно с параллельной, т.е. так, что создаваемые ими маг. потоки Ф1(I) и Ф2=const оказываются направленными одинаково и склад.
Ф=Ф1(I)+Ф2. С ув. нагрузки на валу возрастает ток якоря и поток послед. обмотки. Результ. поток и момент ув., скорость несколько снижается. Мех. хар-ки приведены на рис.
![]() Смешанное возбуждение (СВ) дает двигателю преимущества разных способов возбуждения и «устраняет» недостатки. Например, двигателю не угрожает «разнас» из-за вспомогательной параллельной обмотки. Двигатели смешанного
Смешанное возбуждение (СВ) дает двигателю преимущества разных способов возбуждения и «устраняет» недостатки. Например, двигателю не угрожает «разнас» из-за вспомогательной параллельной обмотки. Двигатели смешанного
возбуждения имеют наиб. пусковой момент. Для двигателя смешанного возбуждения применяют чаще всего полюсное и якорное рег-е , при котором обмотку параллельного возбуждения (ПВ) переключают на независимый источник питания.

 2.Спосбы регулирования частоты вращения асинхронных двигателей
. Частота вращения асинхр. двигателя опред. по ф-ле:n2=n1(1-s)=60*f1(1-s)/p, из которой следует три принципиально возможных метода регулирования АД- изменение частоты f1, числа полюсов 2p и скольжения s. Скольжение обычно изменяют путем изменения потерь в цепи ротора с помощью реостата, но в некоторых случаях для этого изменяют вел-ну питающего напряжения. Частотное регулирование.
Этот способ регулирования частоты вращения позволяет применять наиболее надедные и дешевые АД с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника эл. тока переменной частоты. Регулирование путем изменения числа полюсов.
Такое рег-е позволяет получить ступенчатое изменение частоты вращения. На рис С-4.35 показана простейшая схема (для одной фазы), позволяющая изменить число полюсов обмотки статора в2 раза. Для этого каждую фазу обмотки статора разделяют на две части. Которые переключают с послед. соед-я на параллельное. Из рис. Видно, что при включении катушек 1-2 и 3-4 в две параллельные ветви число полюсов уменьшается в 2 раза, а следовательно, частота вращения маг. поля ув. в 2 раза. При переключении число послед. вкл. витков в каждой фазе ум. в 2 раза, но так как частота вращения ув. в 2 раза, ЭДС , индуцируемая в фазе остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь 3 или 4 частоты вращения, то на статоре располагают еще одну обмотку, при переключении кот. можно получить дополнительно 2 частоты. АД с переключением числа полюсов называют многоскоростными. Многоскоростные двигатели имеют след. недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно и большую стоимость. Кроме того рег-е осущ-ся большими ступенями; при частоте f1=50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.Регулирование путем включения реостата в цепь ротора.
При включении в цепь ротора добавочных активных сопротивлений Rдоб1, Rдоб2, Rдоб3 и других изменяется форма зависимости М=f(s) и механической хар-ки n2=f(M) двигателя (рис С-4.37,а).
2.Спосбы регулирования частоты вращения асинхронных двигателей
. Частота вращения асинхр. двигателя опред. по ф-ле:n2=n1(1-s)=60*f1(1-s)/p, из которой следует три принципиально возможных метода регулирования АД- изменение частоты f1, числа полюсов 2p и скольжения s. Скольжение обычно изменяют путем изменения потерь в цепи ротора с помощью реостата, но в некоторых случаях для этого изменяют вел-ну питающего напряжения. Частотное регулирование.
Этот способ регулирования частоты вращения позволяет применять наиболее надедные и дешевые АД с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника эл. тока переменной частоты. Регулирование путем изменения числа полюсов.
Такое рег-е позволяет получить ступенчатое изменение частоты вращения. На рис С-4.35 показана простейшая схема (для одной фазы), позволяющая изменить число полюсов обмотки статора в2 раза. Для этого каждую фазу обмотки статора разделяют на две части. Которые переключают с послед. соед-я на параллельное. Из рис. Видно, что при включении катушек 1-2 и 3-4 в две параллельные ветви число полюсов уменьшается в 2 раза, а следовательно, частота вращения маг. поля ув. в 2 раза. При переключении число послед. вкл. витков в каждой фазе ум. в 2 раза, но так как частота вращения ув. в 2 раза, ЭДС , индуцируемая в фазе остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь 3 или 4 частоты вращения, то на статоре располагают еще одну обмотку, при переключении кот. можно получить дополнительно 2 частоты. АД с переключением числа полюсов называют многоскоростными. Многоскоростные двигатели имеют след. недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно и большую стоимость. Кроме того рег-е осущ-ся большими ступенями; при частоте f1=50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.Регулирование путем включения реостата в цепь ротора.
При включении в цепь ротора добавочных активных сопротивлений Rдоб1, Rдоб2, Rдоб3 и других изменяется форма зависимости М=f(s) и механической хар-ки n2=f(M) двигателя (рис С-4.37,а).
![]() При этом некоторому нагрузочному моменту Мн соответствуют скольжения s1, s2, s3, …, большие, чем скольжения sе, при работе двигателя на естественной характеристике (при Rдоб=0). Следовательно, установившаяся частота вращ-я двигателя ум. от ne до n1, n2, n3, … (рис С-4.37,б).Этот метод рег-я может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его явл.:1)большие потери энергии в регулировочном реостате;2) чрезмерно «мягкая» механическая хар-ка двигателя при большом сопротивлении в цепи ротора. В некоторых случаях это недопустимо, т.к. небольшому изменению нагрузочного момента соотв. существен. Изменение частоты вращения. Регулирование путем изменения величины питающего напряжения.
Для двигателей нормального исполнения такое регулирование не неприменимо. Т.к. при уменьшении питающего напряжения резко уменьшается максимальный момент (рис С-4.38). Рассматриваемый метод можно использовать для регулирования двигателей с большим активным сопротивлением ротора, т.к. в этом случае скольжение sкр резко возрастет и максимум момента сдвигается в зону, близкую к s=1 (кривые1’,2’,3’) и даже в область, где s>1. Однако, это ведет к значительному ув. потерь мощности и снижению КПД, поэтому такой метод можно применять только в микродвигателях, для которых вел-на КПД не имеет решающего значения. Изменение направления вращения.
Для изменения направления вращения ротора электродвигателя надо изменить направление вращения маг. поля. Для этого необходимо изменить порядок чередования тока в фазах обмотки статора. В трехфазных машинах это осущ-ся путем переключения двух любых проводов, подводящих ток из трехфазной цепи к фазам этой обмотки.(рис , а и б).
При этом некоторому нагрузочному моменту Мн соответствуют скольжения s1, s2, s3, …, большие, чем скольжения sе, при работе двигателя на естественной характеристике (при Rдоб=0). Следовательно, установившаяся частота вращ-я двигателя ум. от ne до n1, n2, n3, … (рис С-4.37,б).Этот метод рег-я может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его явл.:1)большие потери энергии в регулировочном реостате;2) чрезмерно «мягкая» механическая хар-ка двигателя при большом сопротивлении в цепи ротора. В некоторых случаях это недопустимо, т.к. небольшому изменению нагрузочного момента соотв. существен. Изменение частоты вращения. Регулирование путем изменения величины питающего напряжения.
Для двигателей нормального исполнения такое регулирование не неприменимо. Т.к. при уменьшении питающего напряжения резко уменьшается максимальный момент (рис С-4.38). Рассматриваемый метод можно использовать для регулирования двигателей с большим активным сопротивлением ротора, т.к. в этом случае скольжение sкр резко возрастет и максимум момента сдвигается в зону, близкую к s=1 (кривые1’,2’,3’) и даже в область, где s>1. Однако, это ведет к значительному ув. потерь мощности и снижению КПД, поэтому такой метод можно применять только в микродвигателях, для которых вел-на КПД не имеет решающего значения. Изменение направления вращения.
Для изменения направления вращения ротора электродвигателя надо изменить направление вращения маг. поля. Для этого необходимо изменить порядок чередования тока в фазах обмотки статора. В трехфазных машинах это осущ-ся путем переключения двух любых проводов, подводящих ток из трехфазной цепи к фазам этой обмотки.(рис , а и б).
Билет №21
1.Приведенный трансформатор. Схема замещения. Векторная диаграмма.
В общем случае параметры 1-ой и 2-ой обмотки отличны друг от друга, причём это отличие тем больше, чем больше коэффициент трансформации трансформатора. Это затрудняет расчёт и построение векторных диаграмм. Для устранения этого несоответствия все параметры трансформатора приводят к одинаковому числу витков, например к w1, т.е. n=w1/w2. n'=w1/w’2 при этом w2’=w1, n’=1. Этот трансформатор называется приведённым . Имеется ввиду, что приведение вторичных параметров не должно изменить энергетических показателей трансформатора, т.е. все мощности и фазовые сдвиги во 2-ой обмотке приведённого трансформатора остаются такими же что и у реального. Пример: Е2I2=E2'I2'; I2’=I2*(w2/w1), подставив полученное уравнение пересчитаем ЭДС через приведённый трансформаторÞ Е2’=E2*n
U2I2=U2’I2’ ÞU2’=U2*n
I2 2 R2=I2 ’2 R2’ Þ R2’=R2*n2
I2 2 X2=I2 ’2 X2’ ÞX2’=X2*n2
Zн ’= Zн *n2
Электрическая составляющая привед. трансформатора определяют следующие формулы:1-ая цепьìU 1 =- E 1 +I 1 R1+I 1 jX1
îI1 =I0 +(-I2 ’)
 2-ая цепь U2
’=E2
’-I2’R2’-I2’jX2’=I2
Zн’,
2-ая цепь U2
’=E2
’-I2’R2’-I2’jX2’=I2
Zн’,
Схема замещения трансфор-ра.
Для облегчения исследования трансформатора в различных режимах работы, а также расчёта применяется схема замещения трансф. Обратимся к предыдущему рисунку, здесь R1X1 и R2’X2’ условно вынесены за обмотку, т.к. по условию привед-ого трансф-ра коэф. трансф-ции n’=1, очевидно E1=E2’,Þпотенциалы точек А и а и соответственно потенциалы точек X и x одинаковы, что позволяет представить эту схему в виде Т-образной схемы замещения.
Эта схема имеет ветвь с параметрами R0 X0 , которыми заменили магнитную связь с цепями трансформатора. Эта схема удовлетворяет системе уравнений электрических составляющих приведенного трансф-ра и включает в себя 3 ветви:
1.) Первичная ветвь z1=R1+jX1
2.) Магнитная ветвь z0 =R0 +jX0
3.) Вторичная ветвь ìz 2 ’=R2 ’+jX2 ’
îZ н ’=Rн ’+jХн ’
Параметры 2.) определяются в режиме х.х.
Векторная диаграмма трансформатора под нагрузкой.
Графическое отображение основных уравнений приведённого трансф-ра. Построение начинается с вектора амплитудного значения основного магнитного потока: Фcм= ((0,9…0,95)U1)/(U1Unfw) Строим вектор намагн. Тока I0 , этот вектор опережает магн. Поток на угол магнитного запаздывания. ЭДС:E1=E2 отстают на угол 900 (для приведённого трансформатора они равны). Строим вектор приведённого тока I2’. Этот вектор отстаёт от ЭДС (для RL нагрузки) на Ðy2 =arctg(X2 ’+Xн ’)/(R2 ’+Rн ’) Определим положение вектора U2 ’. Обратимся к уравнению для электрической составляющей для вторичной цепи: U2’=E2’-I2’R2’-I2’jX2’ Проводим перпендикуляр к вектору I2 ’ от конца вектора Е1 откладываем на нём “-I2 ’jX2 ”, затем со знаком “-” параллельно I2 ’ “I2 ’R2 ’ ” и от нуля до конца вектора –I2 ’R2 ’ и получаем U2 ’ Вектор от конца U2 ’ до конца E1 (-I2 ’Z2 ’) А треугольник называется падением напряжения во вторичной обмотке трансформатора Ðf2 =(I2 ’^U2 ’) Ðf2 =arctg(Xн’/Rн)
Ðy2 =arctg(X2 ’+Xн ’)/(R2 ’+Rн ’)
U1’=-E1’+I1’R1’-I1’jX1’
2.Энергетическая диаграмма асинхронного двигателя. КПД двигателя.
Асинхронный двигатель потребляет из сети активную мощность P1
=m1
U1
I1
cosφ1
. часть этой мощности теряется в виде электрический потерь pэл1
в активном сопротивлении первичной обмотки: pэл1
=m1
I2
1
r1
, а другая часть – в виде магнитных потер![]() ь pмг1
=m1
I2
м
rм
в сердечнике статора. Оставшаяся часть мощности Pэм
=P1
- pэл1
- pмг1
представляет собой электромагнитную мощность, передаваемую посредством магнитного поля со статора на ротор. На схеме замещения этой мощности соответствует мощность в активном сопротивлении вторичной цепи r’2
/S. Pэм
= m2
I2
2
r2
/S. Часть этой мощности теряется в виде электрических потерь pэл2
=m2
I2
2
r2
в активном сопротивлении вторичной обмотки r’2
. Остальная часть мощности Pмх
= Pэм
-pэл2
превращается в механическую мощность развиваемую на роторе. Pмх
= m2
I2
2
r2
(1-S)/S Часть механической мощности теряется внутри самой машины в виде механических потерь pмх
(на вентилятор, трение и т.д.), магнитных потерь сердечнике ротора pмг2
и добавочных потерь pд
. Последние вызваны высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник обмоток и зубчатого строения статора и ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационными потерями. Магнитные потери в сердечнике ротора при нормальных рабочих режимах обычно очень малы и отдельно не учитываются. Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений r1 и r2 и поэтому в величину pд
не включают.Сумма потерь двигателя p∑= pэл1
+ pмг
+ pэл2
+ Pмх
+ pд
ь pмг1
=m1
I2
м
rм
в сердечнике статора. Оставшаяся часть мощности Pэм
=P1
- pэл1
- pмг1
представляет собой электромагнитную мощность, передаваемую посредством магнитного поля со статора на ротор. На схеме замещения этой мощности соответствует мощность в активном сопротивлении вторичной цепи r’2
/S. Pэм
= m2
I2
2
r2
/S. Часть этой мощности теряется в виде электрических потерь pэл2
=m2
I2
2
r2
в активном сопротивлении вторичной обмотки r’2
. Остальная часть мощности Pмх
= Pэм
-pэл2
превращается в механическую мощность развиваемую на роторе. Pмх
= m2
I2
2
r2
(1-S)/S Часть механической мощности теряется внутри самой машины в виде механических потерь pмх
(на вентилятор, трение и т.д.), магнитных потерь сердечнике ротора pмг2
и добавочных потерь pд
. Последние вызваны высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник обмоток и зубчатого строения статора и ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационными потерями. Магнитные потери в сердечнике ротора при нормальных рабочих режимах обычно очень малы и отдельно не учитываются. Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений r1 и r2 и поэтому в величину pд
не включают.Сумма потерь двигателя p∑= pэл1
+ pмг
+ pэл2
+ Pмх
+ pд
P2 =P1 - p∑К.П.Д. η=P2 /P1 =1- p∑/P1
![]()
Билет №22
1. Электромагнитный момент асинхронного двигателя. Вывод формулы момента.
асинхронного двигателя пропорционален его электромагнитной мощности, Н*м М=Рэм/w1, где w1=2пиf1/p—угловая синхронная частота. Электромагнитная мощность Pэм=Pэ2/s=m2*r2*I2^2/s, или Pэм=m1*I'2^2*r'2/s, где r'2-приведенное активное cопротивление обмотки ротора; r'2=r2*kz, kz=m1*w1^2*kоб1^2 /(m2*w2^2*kоб2^2) - коэффициент приведения сопротивлений обмотки ротора. Приведенный ток ротора прямо пропорционален на пряженик) сети, А: I2=U1/sqrt((r1+r'2/s)^2+(x1+x'2)^2), где x'2=x2*kz — приведенное индуктивное сопротивление рассеяния обмотки ротора. Запишем зависимость электромагнитного момента асинхронного двигателя от скольжения, Н*м: ![]() T.к. r1, r'2, x1 u x'2 при работе Д с различными частотами вращения ротора (скольженьями s) остаются приблизительно одинаковыми, а также неизменными остаются и параметры питающей сети U1 и fi, то М=... дает возможность установить зависимость электромагнитного момента М от скольжения s. Графическая зависимость М=f(s) представляет собой механическую характеристику АД (рис. 3.7).
T.к. r1, r'2, x1 u x'2 при работе Д с различными частотами вращения ротора (скольженьями s) остаются приблизительно одинаковыми, а также неизменными остаются и параметры питающей сети U1 и fi, то М=... дает возможность установить зависимость электромагнитного момента М от скольжения s. Графическая зависимость М=f(s) представляет собой механическую характеристику АД (рис. 3.7).
 |
Анализ механической характеристики показывает, что при включении двигателя в сеть, когда вращающееся поле имеет частоту вращения n1 , а ротор еще неподвижен (n2=0, s=1), на роторе создается начальный пусковой момент Мп, выражение для которого получим из при s=1: ![]() Под действием момента Мп ротор двигателя приводится во вращение, при этом скольжение уменьшается, а вращающий момент увеличивается. При критическом скольжении sкр момент достигает максимального значения. Критическое скольжение sкр пропорционально активному сопротивлению обмотки ротора: sкр=r'2/(x1+x'2).
Под действием момента Мп ротор двигателя приводится во вращение, при этом скольжение уменьшается, а вращающий момент увеличивается. При критическом скольжении sкр момент достигает максимального значения. Критическое скольжение sкр пропорционально активному сопротивлению обмотки ротора: sкр=r'2/(x1+x'2).
Максимальный электромагнитный момент асинхронного двигателя, Нм, ![]() После достижения моментом значения Мmax частота вращения ротора продолжает увеличиваться, а момент — уменьшаться. Так продолжается до тех пор, пока электромагнитный момент М не станет равным сумме противодействующих моментов: М=Мо+М2=Мст, где Мо — момент холостого хода, М2—полезный нагрузочный момент, создаваемый рабочей машиной, приводимой во вращение двигателем. Пусть M2 соответствует номинальной нагрузке двигателя, тогда установившийся режим работы двигателя определится точкой на механической характеристике с координатами М=Мном и s=sном, где Мном и sном—номинальные значения электромагнитного момента и скольжения. Из анализа механической характеристики следует, то устойчивая работа асинхронного двигателя будет при скольжениях s<sкр, т.е. на участке ОА механической характеристики, где изменения нагрузки на валу Д сопровождаются соответствующими изменениями эл-маг момента. Так если Д работал в режиме номинальной нагрузки, а затем нагрузочный момент М2 на валу увеличился до M'2 то равенство моментов нарушится (Мном<Мо+М'2) частота вращения ротора начнет убывать, скольжение s -увеличиваться. Это приведет к росту эл-маг момента до значения М', равного сумме противодействующих восстановится. Асинхронные двигатели общего назначения малой мощн
ости имеют перегрузочную способность l
=2,0—2,2 .
После достижения моментом значения Мmax частота вращения ротора продолжает увеличиваться, а момент — уменьшаться. Так продолжается до тех пор, пока электромагнитный момент М не станет равным сумме противодействующих моментов: М=Мо+М2=Мст, где Мо — момент холостого хода, М2—полезный нагрузочный момент, создаваемый рабочей машиной, приводимой во вращение двигателем. Пусть M2 соответствует номинальной нагрузке двигателя, тогда установившийся режим работы двигателя определится точкой на механической характеристике с координатами М=Мном и s=sном, где Мном и sном—номинальные значения электромагнитного момента и скольжения. Из анализа механической характеристики следует, то устойчивая работа асинхронного двигателя будет при скольжениях s<sкр, т.е. на участке ОА механической характеристики, где изменения нагрузки на валу Д сопровождаются соответствующими изменениями эл-маг момента. Так если Д работал в режиме номинальной нагрузки, а затем нагрузочный момент М2 на валу увеличился до M'2 то равенство моментов нарушится (Мном<Мо+М'2) частота вращения ротора начнет убывать, скольжение s -увеличиваться. Это приведет к росту эл-маг момента до значения М', равного сумме противодействующих восстановится. Асинхронные двигатели общего назначения малой мощн
ости имеют перегрузочную способность l
=2,0—2,2 .
2. Дугогасительные устройства.
Билет №23
1. Исполнительные асинхронные двигатели. Принципы управления исполнительными асинхронными двигателями.
![]() Двухфазные асинхронные двигатели получили наибольшее применение в качестве исполнительных двигателей. На статоре такого двигателя расположена двухфазная обмотка. Одна из обмоток фазы статора - это обмотка возбуждения 0В. Она постоянно включена в сеть переменного тока на неизменное напряжение U1. Другая обмотка фазы статора — это обмотка управления ОУ, на нее подают сигнал управления напряжением Uy от блока управления БУ Для работы асинхронного исполнительного двигателя необходимо, чтобы обмотка статора создавала вращающееся магнитное поле. Условие возникновения такого поля - наличие в двигателе пространственного и временного сдвига МДС обмоток фазы статора. Пространственный сдвиг МДС обеспечивается конструкцией двигателя: обмотки фазы статора расположены так, что их оси сдвинуты в пространстве относительно друг друга на угол 90 эл. град. Временной (фазовый) сдвиг МДС создается включением обмоток статора по специальным схемам, содержащим фазовращатель или фазосдвигающий конденсатор в цепи одной из обмоток фазы. Для управления асинхронными исполнительными двигателями применяют три способа: амплитудный, фазовый и амплитудно-фазовый.
Двухфазные асинхронные двигатели получили наибольшее применение в качестве исполнительных двигателей. На статоре такого двигателя расположена двухфазная обмотка. Одна из обмоток фазы статора - это обмотка возбуждения 0В. Она постоянно включена в сеть переменного тока на неизменное напряжение U1. Другая обмотка фазы статора — это обмотка управления ОУ, на нее подают сигнал управления напряжением Uy от блока управления БУ Для работы асинхронного исполнительного двигателя необходимо, чтобы обмотка статора создавала вращающееся магнитное поле. Условие возникновения такого поля - наличие в двигателе пространственного и временного сдвига МДС обмоток фазы статора. Пространственный сдвиг МДС обеспечивается конструкцией двигателя: обмотки фазы статора расположены так, что их оси сдвинуты в пространстве относительно друг друга на угол 90 эл. град. Временной (фазовый) сдвиг МДС создается включением обмоток статора по специальным схемам, содержащим фазовращатель или фазосдвигающий конденсатор в цепи одной из обмоток фазы. Для управления асинхронными исполнительными двигателями применяют три способа: амплитудный, фазовый и амплитудно-фазовый.
![]() При амплитудном управлении напряжение управления Uу независимо от его значения имеет фиксированный фазовый сдвиг на 90° относительно напряжения U1. Управление исполнительным двигателем выполняется
При амплитудном управлении напряжение управления Uу независимо от его значения имеет фиксированный фазовый сдвиг на 90° относительно напряжения U1. Управление исполнительным двигателем выполняется
путем изменения значения (амплитуды) напряжения управления. Изменение частоты вращения и электромагнитного момента вызвано тем, что при равенстве МДС обмоток фазы статора (Fу = fв) вращающееся поле в двигателе круговое, а при изменении напряжения Uy равенство нарушается, поле становится эллиптическим и на ротор двигателя действуют не только прямой (вращающий), но и обратный (тормозящий) момент. Реверс двигателя при амплитудном управлении достигается изменением фазы Uy на 180°. Относительное значение напряжения управления при амплитудном управлении определяется эффективным коэффициентом сигнала aе=k Uу/U1, где к=kобв*wв/(кобу*wу),кобв и koбу — обмоточные коэффициенты обмоток возбуждения и управления; wв и wу число витков в этих обмотках. Круговое вращающееся поле статора соответствует ае=1. При фазовом управлении напряжение управления имеет постоянное значение (амплитуду) Uy=U1/k, управление двигателем выполняется путем изменения угла фазового сдвига этого напряжения относительно U1 в диапазоне b =0 —90° (рис. в). Коэффициент сигнала при фазовом управлении а = sinb. При фазовом сдвиге между напряжениями Uу и U1 на угол b = 90° вращающееся поле статора круговое и а=1. Если b<90°, магнитное поле статора становится эллиптическим, если b =0—пульсирующим. Если b<0, т. е. угол фазового сдвига отрицательный, то двигатель изменяет направление вращения ротора. При амплитудно-фазовом управлении в цепь обмотки возбуждения 0В включают фазосдвигающий конденсатор С. При изменении значения (амплитуды) напряжения управления Uу изменяется ток в обмотке управления и возбуждения: это приводит к изменению как величины, так и фазы напряжения на обмотке возбуждения Uв. Емкость конденсатора С выбирается такой, чтобы при номинальном напряжении управления Uном и неподвижном роторе( n2=0) вращающее поле двигателя было круговым. Этому режиму соответствует коэффициент сигнала а=а0. Сравнение способов а)линейность механ и регул хар-к выше всего при фазовом управлдении(ампл-фаз самое большое отклонение) б) Мощность при ампл и ампл-фаз практически одинакова и пропорц квадрату коэф сигнала, при фаз сигнал не влияет на мощность. В) наиболее прост фазовый, так как не требует спец. Средств для сдвига фаз между напряжением управления и возбуждения.
2. Электроизмерительные приборы с электромагнитным измерительным механизмом.
Электромагнитный механизм состоит из неподвижной катушки и укрепленной на оси подвижной пластины из магнитомягкого материала. При подаче в катушку постоянного тока создается магнитное поле, которое намагничивает пластину, стремящуюся втянуться внутрь катушки. Возникающий вращающий момент пропорционален квадрату тока: Mвр»C*I2 . При подаче в катушку синусоидального тока i=Im*sinwt возникает вращающий момент, мгновенное значение которого пропорционально квадрату мгновенного значения тока: врt»C*i2 . Подвижная часть механизма обладает инерцией и поэтому реагирует на значение момента Mвр: Mвр»1/T*òT 0 C*i2 dt»C*I2 .
Вращающий момент механизма в цепи переменного тока пропорционален квадрату действующего значения тока: I=Ö(1/T*ò i2 dt). Угол отклонения подвижной части и указателя a, укрепленного на оси, также пропорционален квадрату тока: a»C2 *I2 . Квадратичная шкала очень неудобна, поэтому ее стараются сделать более равномерной, подбирая соответствующую форму ферромагнитной пластины. При этом удается получить шкалу, которая неравномерна только в начальной части. Кроме механизма с плоской катушкой применяют механизмы с круглой катушкой и с магнитопроводом. Последний усиливает магнитное поле катушки и устраняет влияние внешних магнитных полей. Электромагнитные приборы, в которых используются электромагнитные механизмы, применяют для измерений в цепях постоянного и переменного токов в качестве амперметров и вольтметров, а также фарадметров и фазометров. Амперметры изготавливают однопредельными и многопредельными путем секционирования катушки. Вольтметры обычно выполняют на несколько пределов измерения с использованием ряда добавочных резисторов.
Билет №24
1. Гистерезисный двигатель.
это синхронный двигатель, вращающий момент которого создается за счет магнитного гистерезиса материала ротора. Статор такого двигателя имеет обычную трехфазную или двухфазную обмотку с конденсаторами, которые создают вращающееся магнитное поле, а ротор представляет собой стальной цилиндр, выполненный из магнитно – твердого металла ( имеющую широкую петлю гистерезиса) без обмотки т.к применение обычной электротехн стали не уместно т.е не позволяет получить достаточно большой электромагнитный момент. Для экономии дорогих спец сплавов роторы изготавливают в виде массивного или шихтованного из отдел пластин кольца кобальтовой стали. Ротор гистерезисного двигателя намагнич-ся под действием магнитного поля статора. При синхронной частоте вращения ротор неподвижен относит. вращ магнитного поля статора и ось магнитного поля ротора отстает отоси поля статора на угол θг и возникают тангенциальные составляющие. Магнитное значение угла θг определ только св-ми материала ротора. При пуске двигателя когда частота вращения ротора не равна n1, кроме гистерезисного момента Мг появляется также асинхронный момент Мас возникающий в результате взаимодействия вращающегося магнитного поля с вихревыми токами, индуцируемыми этим полем в роторе. Результ момент равен Мрез=Мг+Мас. Гистерезисные двигатели могут работать как в синхронном, так и в асинхронном режимею Однако работа двигателя в асинхронном режиме не экономична т.к при этом возникают значительные потери энергии в роторе. Одной из разновидностью ГД яв-ся двигатель с экранированными полюсами. Ротор в таком двигателе вращается в одну сторону от экранированной части полюса к неэкранированной. Достоинством ГД яв-ся простота конструкции, надежность в работе, малый пусковой момент, высокий КПД –60%, бесшумность. К недостаткам относится повышенная стоимость и склонность к качаниям при резких изменениях нагрузки.
2. Нагрев и охлаждение электрических машин. Режимы работы и выбор двигателя по мощности.
Все виды потерь мощности в двигателе преобразуются в теплоту, которая частично отдаётся в окружающую среду, а частично на нагревание двигателя. В начальный период работы двигатель имеет температуру окружающей среды и вся теплота выделяемая в двигателе идет на повышение его температуры. По мере повышения температуры двигателя количество теплоты рассеиваемое в окр среду увеличивается, когда превышение температуры двигателя над темп окр среды достигнет t(уст), то вся теплота, выделяемая в двигателе будет рассеиваться в окр среду при этом дальнейшее повышение температуры двигателя прекратится т.е. наступит режим теплового равновесия. Зависимость превышения температуры двигателя над температурой окр среды от времени выражается равенством t=t(уст)*(1-е- t / T н )
Тн- постоянная времени нагревания. Кривая нагревания t=f(t) имеет вид
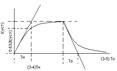
Видно, что двигатель достигает установ тем-ры только по истечению длительного времени. Проведя касательную к кривой нагревания в её начальной части получим отрезок равный в масштабе температур постоянной нагревания Тн, представляющей собой время за которое двигатель нагревается до тем-ры равной 0,632t(уст). Двигатель достигает t(уст) по истечении времени t=(3..5)Тн. Изменение температуры в процессе охлаждения двигателя происходит согласно закону t=t(уст)*e- t / T . По способу охлаждения двигатели разделяют на двигатели с естественным охлаждением и с искусственным. Двигатели с естест охлаждением не имеют вентиляторов и каких либо других устройств, способствующих интенсивному охлаждению. В двиг с искусст охлаждением на валу расположен центробежный вентилятор, который вращается и создает движение воздуха, который охлаждает открытые части двигателя. Существует 3 основных номинальных режима работы двигателя, различ характером изменения нагрузки. 1) Продолжительный номинальный режим. Режим работы при неизменной номинальной нагрузке Рном, продолжающийся столько времени, что тем-ра нагрева всех частей машины достигает уст значений. Условное обозначение режима S1.
![]()
2) Кратковременный номинальный режим. Режим работы при котором периоды неизменной номинальной нагрузки чередуются с периодами отключения двигателя. При этом за период нагрузки двигатель не достигает t(уст). А за период отключения двигатель успевает охладиться до тем-ры окр среды. Условное обозначение режима S2.

3) Повторно- кратковременный. Режим работы при котором кратковременные периоды номинальной нагрузки двигателя tн чередуются с периодами отключения двигателя (паузами) tп. Причём за время tн двигатель не успевает достичь уст значения температуры. А за время tп не успевает охладится, до тем-ры окр среды. Общее время работы двигателя в этом режиме работы разделяется на периодически повторяющиеся циклы tц=tн+tп. Условное обозначение режима S3. Этот режим характеризуется относительной продолжительностью вкл в % ПВ=(tн/tц)*100%.

Кроме рассмотренных 3 ном режимов существуют ещё 6 повторно- кратковременных и перемежающихся режимов.
Путеводитель
Билет №1
1. Асинхронный электродвигатель. Конструкция, принцип действия, классификация, обозначение двигателей серии 4А и АИ.
2. Реакция якоря в машинах постоянного тока.
Билет №2
1. Трансформатор. Конструкция, принцип действия, классификация, обозначение.
2 . Коммутация в машинах постоянного тока.
Билет №3
1 .Однофазные асинхронные двигатели.
2. Электромагнитное реле
Билет №4
1. Электромагнитный момент машины постоянного тока. Электромагнитная мощность.
2 . Общие сведения об измерительных преобразователях. Делители напряжения, шунты, добавочные резисторы.
Билет №5
1. Универсальный коллекторный электродвигатель.
2. Электрические контакты. Износостойкость контактов, устройства дугогашения.
Билет №6
1 .Генератор постоянного тока независимого и параллельного возбуждения. Характеристики.
2 . Потери мощности и КПД трансформатора. Энергетическая диаграмма.
Билет№7
1. Асинхронный двигатель с фазным ротором. Характеристики. 2. Электроизмерительные приборы с электростатическим измерительным механизмом.
Билет №8
1 . Конструкция и принцип действия машины постоянного тока. ЭДС машины постоянного тока.
2 . Асинхронный тахогенератор.
Билет №9
1. Конструкция и принцип действия синхронной машины.
2. Электроизмерительные приборы с магнитоэлектрическим измерительным механизмом.
Билет №10
1. Конденсаторный асинхронный двигатель.
2. Астатические электроизмерительные приборы.
Билет №11
1. Однофазный асинхронный двигатель с экранированными полюсами.
2. Магнитный пускатель.
Билет №12
1. Асинхронный электродвигатель с полым немагнитным ротором.
2. Электроизмерительные приборы электродинамической системы.
Билет№13
1. Асинхронный двигатель с двойной "беличьей клеткой" и глубокопазный.
2. Логометрическнй измерительный механизм.
Билет №14
1. Двигатель постоянного тока, параллельного и независимого возбуждения. Рабочие механические и регулировочные характеристики. проверить
2 Электроизмерительные приборы с магнитоэлектрическим измерительным механизмом.
Билет №15
1 . Сельсины и вращающиеся трансформаторы
2 . Процесс самовозбуждения генератора постоянного тока.
Билет №16
1. Частота вращения двигателя постоянного тока. Способы регулирования частоты вращения.
2. Измерительные трансформаторы.
Билет №17
1. Механическая характеристика асинхронного двигателя. Естественная и искусственная характеристики.
2. Опытное определение параметров схемы замещения трансформатора.
Билет №18
1 . Пуск двигателей постоянного тока. Пусковые характеристики.
2 . Изменение вторичного напряжения трансформатора. Внешняя характеристика трансформатора.
Билет№19
1. Построение механической характеристики асинхронного двигателя по паспортным данным.
2. Электроизмерительные приборы индукционной системы.
Билет №20
1. Двигатели постоянного тока с последовательным и смешанным возбуждение. Характеристики,
2. Способы регулирования частоты вращения асинхронных двигателей.
Билет №21
1 .Приведенный трансформатор. Схема замещения. Векторная диаграмма.
2 .Энергетическая диаграмма асинхронного двигателя. КПД двигателя.
Билет №22
1. Электромагнитный момент асинхронного двигателя. Вывод формулы момента.
2. Дугогасительные устройства.
Билет №23
1. Исполнительные асинхронные двигатели. Принципы управления исполнительными асинхронными двигателями.
2. Электроизмерительные приборы с электромагнитным измерительным механизмом.
Билет №24
1 . Гистерезисный двигатель.
2. Нагрев и охлаждение электрических машин. Режимы работы и выбор двигателя по мощности.
Путеводитель
Билет №1
 1.
Асинхронный электродвигатель. Конструкция, принцип действия, классификация, обозначение двигателей серии 4А и АИ.
1.
Асинхронный электродвигатель. Конструкция, принцип действия, классификация, обозначение двигателей серии 4А и АИ.
Билет №2
1. Трансформатор. Конструкция, принцип действия, классификация, обозначение.
Билет №3
1 .Однофазные асинхронные двигатели.
Билет №4
1. Электромагнитный момент машины постоянного тока. Электромагнитная мощность.
Билет №5
1. Универсальный коллекторный электродвигатель.
Билет №6
1 .Генератор постоянного тока независимого и параллельного возбуждения. Характеристики.
Билет№7
1. Асинхронный двигатель с фазным ротором. Характеристики.
Билет №8
1 . Конструкция и принцип действия машины постоянного тока. ЭДС машины постоянного тока.
 Билет №9
Билет №9
1. Конструкция и принцип действия синхронной машины.
Билет №10
1. Конденсаторный асинхронный двигатель.
Билет №11
1. Однофазный асинхронный двигатель с экранированными полюсами.
Билет №12
1. Асинхронный электродвигатель с полым немагнитным ротором.
Билет№13
1. Асинхронный двигатель с двойной "беличьей клеткой" и глубокопазный.


|
|
|
 Билет №14
Билет №14
1. Двигатель постоянного тока, параллельного и независимого возбуждения. Рабочие механические и регулировочные характеристики. проверить
Билет №15
1 . Сельсины и вращающиеся трансформаторы
Билет №16
1. Частота вращения двигателя постоянного тока. Способы регулирования частоты вращения.
Билет №17
1. Механическая характеристика асинхронного двигателя. Естественная и искусственная характеристики.
Билет №18
1 . Пуск двигателей постоянного тока. Пусковые характеристики.
Билет№19
1. Построение механической характеристики асинхронного двигателя по паспортным данным.
Билет №20
1. Двигатели постоянного тока с последовательным и смешанным возбуждение. Характеристики,
Билет №21
1 .Приведенный трансформатор. Схема замещения. Векторная диаграмма.
Билет №22
1. Электромагнитный момент асинхронного двигателя. Вывод формулы момента.
Билет №23
1. Исполнительные асинхронные двигатели. Принципы управления исполнительными асинхронными двигателями.
2. Электроизмерительные приборы с электромагнитным измерительным механизмом.
Билет №24
1 . Гистерезисный двигатель.