| Скачать .docx |
Реферат: Динамика материальной точки и поступательного движения твердого тела
Динамика материальной точки и поступательного движения твердого тела
Первый закон Ньютона. Масса. Сила
Первый закон Ньютона : всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит ее изменить это состояние . Стремление тела сохранять состояние покоя или равномерного прямолинейного движения называется инертностью . Поэтому первый закон Ньютона называют также законом инерции .
Первый закон Ньютона выполняется не во всякой системе отсчета, а те системы, по отношению к которым он выполняется, называются инерциальными системами отсчета .
Масса тела — физическая величина, являющаяся одной из основных характеристик материи, определяющая ее инерционные (инертная масса ) и гравитационные (гравитационная масса ) свойства. В настоящее время можно считать доказанным, что инертная и гравитационная массы равны друг другу (с точностью, не меньшей 10–12 их значения).
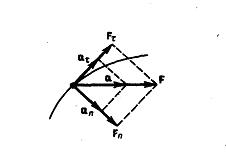
Итак, сила — это векторная величина, являющаяся мерой механического воздействия на тело со стороны других тел или полей, в результате которого тело приобретает ускорение или изменяет свою форму и размеры.
Второй закон Ньютона — основной закон динамики поступательного движения — отвечает на вопрос, как изменяется механическое движение материальной точки (тела) под действием приложенных к ней сил.
а ~ F (т = const ) . (6.1)
а ~ 1/т (F = const) . (6.2)
а = kF / m . (6.3)
В СИ коэффициент пропорциональности k = 1. Тогда
![]()
или
![]() (6.4)
(6.4)
![]() (6.5)
(6.5)
Векторная величина
![]() (6.6)
(6.6)
численно равная произведению массы материальной точки на ее скорость и имеющая направление скорости, называется импульсом (количеством движения) этой материальной точки.
Подставляя (6.6) в (6.5), получим
![]() (6.7)
(6.7)
Выражение (6.7) называется уравнением движения материальной точки .
Единица силы в СИ — ньютон (Н): 1 Н — сила, которая массе 1 кг сообщает ускорение 1 м/с2 в направлении действия силы:
1 Н = 1 кг × м/с2 .
Второй закон Ньютона справедлив только в инерциальных системах отсчета. Первый закон Ньютона можно получить из второго.
В механике большое значение имеет принцип независимости действия сил : если на материальную точку действует одновременно несколько сил, то каждая из этих сил сообщает материальной точке ускорение согласно второму закону Ньютона, как будто других сил не было.
|
|
|
Взаимодействие между материальными точками (телами) определяется третьим законом Ньютона .
F 12 = – F 21 , (7.1)
Третий закон Ньютона позволяет осуществить переход от динамики отдельной материальной точки к динамике системы материальных точек.
В механике мы будем рассматривать различные силы: трения, упругости, тяготения.
Силы трения , которые препятствуют скольжению соприкасающихся тел друг относительно друга.
Внешним трением называется трение, возникающее в плоскости касания двух соприкасающихся тел при их относительном перемещении.
В зависимости от характера их относительного движения говорят о трении скольжения , качения или верчения .
Внутренним трением
называется трение между частями одного и того же тела, например между различными слоями жидкости или газа. Если тела скользят относительно друг друга и разделены прослойкой вязкой жидкости (смазки), то трение происходит в слое смазки. В таком случае говорят о гидродинамическом трении
(слой смазки достаточно толстый) и граничном трении (толщина смазочной прослойки »0,1 мкм и меньше). 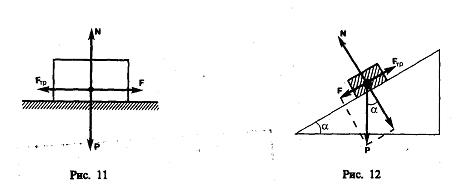
Сила трения скольжения F тр пропорциональна силе N нормального давления, с которой одно тело действует на другое:
F тр = f N ,
где f — коэффициент трения скольжения, зависящий от свойств соприкасающихся поверхностей.
В предельном случае (начало скольжения тела) F =F тр . или P sin a0 = f N = f P cos a0 , откуда
f = tg a 0 .
Для гладких поверхностей определенную роль начинает играть межмолекулярное притяжение. Для них применяется закон трения скольжения
F тр = f ист ( N + Sp 0 ) ,
где р 0 — добавочное давление, обусловленное силами межмолекулярного притяжения, которые быстро уменьшаются с увеличением расстояния между частицами; S — площадь контакта между телами; f ист — истинный коэффициент трения скольжения.
Радикальным способом уменьшения силы трения является замена трения скольжения трением качения (шариковые и роликовые подшипники и т. д.). Сила трения качения определяется по закону, установленному Кулоном:
F тр = f к N / r , (8.1)
где r — радиус катящегося тела; f к — коэффициент трения качения, имеющий размерность dim f к =L. Из (8.1) следует, что сила трения качения обратно пропорциональна радиусу катящегося тела.
Закон сохранения импульса. Центр масс
Совокупность материальных точек (тел), рассматриваемых как единое целое, называется механической системой . Силы взаимодействия между материальными точками механической системы называются — внутренними . Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними . Механическая система тел, на которую не действуют внешние силы, называется замкнутой (или изолированной ). Если мы имеем механическую систему, состоящую из многих тел, то, согласно третьему закону Ньютона, силы, действующие между этими телами, будут равны и противоположно направлены, т. е. геометрическая сумма внутренних сил равна нулю.
Запишем второй закон Ньютона для каждого из n тел механической системы:
Складывая почленно эти уравнения, получаем
![]()
Но так как геометрическая сумма внутренних сил механической системы по третьему закону Ньютона равна нулю, то
![]()
или
![]() (9.1)
(9.1)
где ![]() — импульс системы. Таким образом, производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему.
— импульс системы. Таким образом, производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему.
В случае отсутствия внешних сил (рассматриваем замкнутую систему)
![]()
Последнее выражение и является законом сохранения импульса : импульс замкнутой системы сохраняется, т. е. не изменяется с течением времени.
Эксперименты доказывают, что он выполняется и для замкнутых систем микрочастиц (они подчиняются законам квантовой механики). Этот закон носит универсальный характер, т. е. закон сохранения импульса — фундаментальный закон природы.
Закон сохранения импульса является следствием определенного свойства симметрии пространства — его однородности. Однородность пространства заключается в том, что при параллельном переносе в пространстве замкнутой системы тел как целого ее физические свойства и законы движения не изменяются, иными словами, не зависят от выбора положения начала координат инерциальной системы отсчета.
Центром масс (или центром инерции ) системы материальных точек называется воображаемая точка С , положение которой характеризует распределение массы этой системы. Ее радиус-вектор равен

где mi
и ri
— соответственно масса и радиус-вектор i
-й материальной точки; n
— число материальных точек в системе; ![]() – масса системы. Скорость центра масс
– масса системы. Скорость центра масс
Учитывая, что pi
= mi
vi
, a ![]() есть импульс р
системы, можно написать
есть импульс р
системы, можно написать
![]() (9.2)
(9.2)
т. е. импульс системы равен произведению массы системы на скорость ее центра масс.
Подставив выражение (9.2) в уравнение (9.1), получим
![]() (9.3)
(9.3)
т. е. центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует сила, равная геометрической сумме всех внешних сил, приложенных к системе. Выражение (9.3) представляет собой закон движения центра масс.
Уравнение движения тела переменной массы
Если в момент времени t масса ракеты m , а ее скорость v, то по истечении времени dt ее масса уменьшится на dm и станет равной т — dm , а скорость станет равной v + dv. Изменение импульса системы за отрезок времени dt
![]()
где u — скорость истечения газов относительно ракеты. Тогда
![]()
(учли, что dm dv — малый высшего порядка малости по сравнению с остальными). Если на систему действуют внешние силы, то dp=Fdt , поэтому
![]()
или
![]() (10.1)
(10.1)
Второе слагаемое в правой части (10.1) называют реактивной силой Fp .
Уравнение движения тела переменной массы которое впервые было выведено И. В. Мещерским (1859—1935).
![]() (10.2)
(10.2)
Применим уравнение (10.1) к движению ракеты, на которую не действуют никакие внешние силы. Полагая F=0 и считая, что скорость выбрасываемых газов относительно ракеты постоянна (ракета движется прямолинейно), получим
![]()
откуда
![]()
Значение постоянной интегрирования С определим из начальных условий. Если в начальный момент времени скорость ракеты равна нулю, а ее стартовая масса m 0 , то С = u ln(m 0 ). Следовательно,
v = u ln (m 0 /m ). (10.3)
Это соотношение называется формулой Циолковского. Она показывает, что: 1) чем больше конечная масса ракеты т, тем больше должна быть стартовая масса ракеты m 0 ; 2) чем больше скорость истечения и газов, тем больше может быть конечная масса при данной стартовой массе ракеты.
Энергия — универсальная мера различных форм движения и взаимодействия. С различными формами движения материи связывают различные формы энергии: механическую, тепловую, электромагнитную, ядерную и др. В одних явлениях форма движения материи не изменяется (например, горячее тело нагревает холодное), в других — переходит в иную форму (например, в результате трения механическое движение превращается в тепловое).
Чтобы количественно характеризовать процесс обмена энергией между взаимодействующими телами, в механике вводится понятие работы силы .
![]() (11.1)
(11.1)
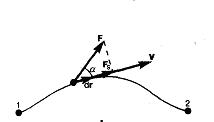
Элементарной работой силы F на перемещении dr называется скалярная величина
![]()
где a — угол между векторами F и dr; ds = |dr| — элементарный путь; Fs — проекция вектора F на вектор dr (рис. 13).
 (11.2)
(11.2)
. Если, например, тело движется прямолинейно, сила F=const и a=const, то получим
|
|
|
где s — пройденный телом путь (см. также формулу (11.1)).
Из формулы (11.1) следует, что при a < p/2 работа силы положительна, в этом случае составляющая Fs совпадает по направлению с вектором скорости движения v (см. рис. 13). Если a > p/2, то работа силы отрицательна. При a = p/2 (сила направлена перпендикулярно перемещению) работа силы равна нулю.
Единица работы — джоуль (Дж): 1 Дж — работа, совершаемая силой 1 Н на пути 1 м (1 Дж=1 Н × м).
Чтобы охарактеризовать скорость совершения работы, вводят понятие мощности :
 (11.3)
(11.3)
За время dt сила F совершает работу Fdr, и мощность, развиваемая этой силой, в данный момент времени
т. е. равна скалярному произведению вектора силы на вектор скорости, с которой движется точка приложения этой силы; N — величина скалярная.
Единица мощности — ватт (Вт): 1 Вт — мощность, при которой за время 1 с совершается работа 1 Дж (1 Вт = 1 Дж/с).
Кинетическая и потенциальная энергии
Кинетическая энергия механической системы — это энергия механического движения этой системы.
Работа dA силы F на пути, который тело прошло за время возрастания скорости от 0 до v, идет на увеличение кинетической энергии dT тела, т. е.
![]()
Используя второй закон Ньютона ![]() и умножая на перемещение dr получаем
и умножая на перемещение dr получаем
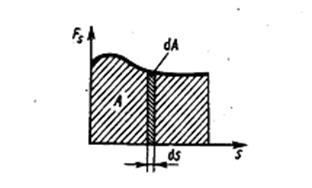
рис 14
Так как ![]() то dA
= mv d
v=
mvdv
=
dT
,
откуда
то dA
= mv d
v=
mvdv
=
dT
,
откуда
![]() (12.1)
(12.1)
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Пусть взаимодействие тел осуществляется посредством силовых полей (например, поля упругих сил, поля гравитационных сил), характеризующихся тем, что работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положений. Такие поля называются потенциальными , а силы, действующие в них, — консервативными . Если же работа, совершаемая силой, зависит от траектории перемещения тела из одной точки в другую, то такая сила называется диссипатнвной ; ее примером является сила трения.
![]() (12.2)
(12.2)
![]() (12.3)
(12.3)
Потенциальная энергия может быть определена исходя из (12.3) как
![]()
где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Это, однако, не отражается на физических законах, так как в них входит или разность потенциальных энергий в двух положениях тела, или производная П по координатам

или в векторном виде
![]() (12.4)
(12.4)
где
 (12.5)
(12.5)
(i, j, k — единичные векторы координатных осей). Для него наряду с обозначением grad П применяется также обозначение ÑП. Ñ («набла») означает символический вектор, называемый оператором Гамильтона* или набла-оператором:
 (12.6)
(12.6)
Конкретный вид функции П зависит от характера силового поля. Например, потенциальная энергия тела массой т, поднятого на высоту h над поверхностью Земли, равна
![]() (12.7)
(12.7)
где высота h отсчитывается от нулевого уровня, для которого П0 =0.
Так как начало отсчета выбирается произвольно, то потенциальная энергия может иметь отрицательное значение (кинетическая энергия всегда положительна!).
Найдем потенциальную энергию упругодеформированного тела (пружины). Сила упругости пропорциональна деформации:
![]()
где Fx уп p — проекция силы упругости на ось х ; k — коэффициент упругости (для пружины — жесткость ), а знак минус указывает, что Fx уп p направлена в сторону, противоположную деформации x .
По третьему закону Ньютона, деформирующая сила равна по модулю силе упругости и противоположно ей направлена, т. е.
![]()
Элементарная работа dA , совершаемая силой Fx при бесконечно малой деформации dx , равна
![]()
а полная работа
идет на увеличение потенциальной энергии пружины. Таким образом, потенциальная энергия упругодеформированного тела
Потенциальная энергия системы является функцией состояния системы. Она зависит только от конфигурации системы и ее положения по отношению к внешним телам.
Полная механическая энергия системы — энергия механического движения и взаимодействия:
![]()
т. е. равна сумме кинетической и потенциальной энергий.
Закон сохранения энергии
Рассмотрим систему материальных точек массами m
1
, m
2
,..., mn
, движущихся со скоростями v1
, v2
,..., vn
. Пусть ![]() ,
, ![]() ,...,
,..., ![]() — равнодействующие внутренних консервативных сил, действующих на каждую из этих точек, a F1
, F2
, ..., Fn
— равнодействующие внешних сил, которые также будем считать консервативными. Кроме того, будем считать, что на материальные точки действуют еще и внешние неконсервативные силы; равнодействующие этих сил, действующих на каждую из материальных точек, обозначим f1
, f2
,
..., fn
. При v
<<
c
массы материальных точек постоянны и уравнения второго закона Ньютона для этих точек следующие:
— равнодействующие внутренних консервативных сил, действующих на каждую из этих точек, a F1
, F2
, ..., Fn
— равнодействующие внешних сил, которые также будем считать консервативными. Кроме того, будем считать, что на материальные точки действуют еще и внешние неконсервативные силы; равнодействующие этих сил, действующих на каждую из материальных точек, обозначим f1
, f2
,
..., fn
. При v
<<
c
массы материальных точек постоянны и уравнения второго закона Ньютона для этих точек следующие:
Двигаясь под действием сил, точки системы за интервал времени dt совершают перемещения, соответственно равные dr1 , dr2 , ..., drn . Умножим каждое из уравнений скалярно на соответствующее перемещение и, учитывая, что dri ==vi dt , получим
Сложив эти уравнения, получим
 (13.1)
(13.1)
Первый член левой части равенства (13.1)

где dT
—
приращение кинетической энергии системы. Второй член ![]() равен элементарной работе внутренних и внешних консервативных сил, взятой со знаком минус, т. е. равен элементарному приращению потенциальной энергии dП системы (см. (12.2)).
равен элементарной работе внутренних и внешних консервативных сил, взятой со знаком минус, т. е. равен элементарному приращению потенциальной энергии dП системы (см. (12.2)).
Правая часть равенства (13.1) задает работу внешних неконсервативных сил, действующих на систему. Таким образом, имеем
![]() (13.2)
(13.2)
При переходе системы из состояния 1 в какое-либо состояние 2
т. е. изменение полной механической энергии системы при переходе из одного состояния в другое равно работе, совершенной при этом внешними неконсервативными силами. Если внешние неконсервативные силы отсутствуют, то из (13.2) следует, что
d (T +П) = 0,
откуда
![]() (13.3)
(13.3)
т. е. полная механическая энергия системы сохраняется постоянной. Выражение (13.3) представляет собой закон сохранение механической энергии : в системе тел, между которыми действуют только консервативные силы, полная механическая энергия сохраняется, т. е. не изменяется со временем.
Механические системы, на тела которых действуют только консервативные силы (внутренние и внешние), называются консервативными системами . Закон сохранения механической энергии можно сформулировать так: в консервативных системах полная механическая энергия сохраняется.
Закон сохранения механической энергии связан с однородностью времени. Однородность времени проявляется в том, что физические законы инвариантны относительно выбора начала отсчета времени.
Существует еще один вид систем — диссипативные системы , в которых механическая энергия постепенно уменьшается за счет преобразования в другие (немеханические) формы энергии. Этот процесс получил название диссипации (или рассеяния ) энергии . Строго говоря, все системы в природе являются диссипативными.
Закон сохранения и превращения энергии — фундаментальный закон природы, он справедлив как для систем макроскопических тел, так и для систем микротел.
Таким образом, энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой. В этом и заключается физическая сущность закона сохранения и превращения энергии — сущность неуничтожимости материи и ее движения.
Графическом представление энергии
График зависимости потенциальной энергии от некоторого аргумента называется потенциальной кривой . Анализ потенциальных кривых позволяет определить характер движения тела.
Будем рассматривать только консервативные системы.
Потенциальная энергия тела массой т, поднятого на высоту h над поверхностью Земли,
П ( h )= mgh .
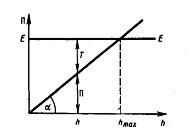
рис 15
Кинетическая энергия Т задается ординатой между графиком П(h ) и горизонтальной прямой ЕЕ. Из приведенного графика можно найти скорость тела на высоте h:
![]()
откуда
Зависимость потенциальной энергии упругой деформации П=кх 2 / 2 от деформации х имеет вид параболы (рис. 16), где график заданной полной энергии тела Е — прямая, параллельная оси абсцисс х, а значения Т и П определяются так же, как на рис. 15. Из рис. 16 следует, что с возрастанием деформации х потенциальная энергия тела возрастает, а кинетическая — уменьшается.
Из анализа графика на рис. 16 вытекает, что при полной энергии тела, равной Е, тело не может сместиться правее х max и левее –х max , так как кинетическая энергия не может быть отрицательной и, следовательно, потенциальная энергия не может быть больше полной энергии. В таком случае говорят, что тело находится в потенциальной яме с координатами – х max £ x £ х max .
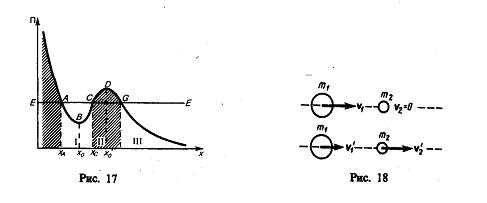
В общем случае потенциальная кривая может иметь довольно сложный вид, например с несколькими чередующимися максимумами и минимумами (рис. 17). Проанализируем эту потенциальную кривую. Если Е — заданная полная энергия частицы, то частица может находиться только там, где П(х ) £ Е, т. е. в областях I и III . Переходить из области I в III и обратно частица не может, так как ей препятствует потенциальный барьер CDG , ширина которого равна интервалу значений х , при которых E < П, а его высота определяется разностью Пm ах –E . Для того чтобы частица смогла преодолеть потенциальный барьер, ей необходимо сообщить дополнительную энергию, равную высоте барьера или превышающую ее. В области I частица с полной энергией Е оказывается «запертой» в потенциальной яме A ВС и совершает колебания между точками с координатами х A и х C .
В точке В
с координатой х
0
(рис. 17) потенциальная энергия частицы минимальна. Так как действующая на частицу сила (см. § 12) ![]() (П — функция только одной координаты), а условие минимума потенциальной энергии
(П — функция только одной координаты), а условие минимума потенциальной энергии  , то в точке В —
Fx
= 0. При смещении частицы из положения х
0
(и влево и вправо) она испытывает действие возвращающей силы, поэтому положение х
0
является положением устойчивого равновесия.
Указанные условия выполняются и для точки
, то в точке В —
Fx
= 0. При смещении частицы из положения х
0
(и влево и вправо) она испытывает действие возвращающей силы, поэтому положение х
0
является положением устойчивого равновесия.
Указанные условия выполняются и для точки ![]() (для Пmax
). Однако эта точка соответствует положению неустойчивого равновесия,
так как при смещении частицы из положения
(для Пmax
). Однако эта точка соответствует положению неустойчивого равновесия,
так как при смещении частицы из положения ![]() появляется сила, стремящаяся удалить ее от этого положения.
появляется сила, стремящаяся удалить ее от этого положения.
Удар абсолютно упругих и неупругих тел
Удар (или соударение )—это столкновение двух или более тел, при котором взаимодействие длится очень короткое время.
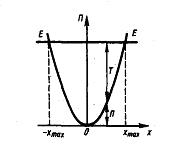
рис 16
Тела во время удара претерпевают деформацию. Сущность удара заключается в том, что кинетическая энергия относительного движения соударяющихся тел на короткое время преобразуется в энергию упругой деформации. Отношение нормальных составляющих относительной скорости тел после и да удара называется коэффициентом восстановления e:
![]()
Если для сталкивающихся тел e=0, то такие тела называются абсолютно неупругими , если e=1 — абсолютно упругими .
Прямая, проходящая через точку соприкосновения тел и нормальная к поверхности их соприкосновения, называется линией удара. Удар называется центральным, если тела до удара движутся вдоль прямой, проходящей через их центры масс. Мы будем рассматривать только центральные абсолютно упругие и абсолютно неупругие удары.
Абсолютно упругий удар — столкновение двух тел, в результате которого в обоих взаимодействующих телах не остается никаких деформаций и вся кинетическая энергия, которой обладали тела до удара, после удара снова превращается в кинетическую энергию (подчеркнем, что это идеализированный случай).
Для абсолютно упругого удара выполняются закон сохранения импульса и закон сохранения кинетической энергии.
Проекции векторов скорости на эту линию равны модулям скоростей. Их направления учтем знаками: положительное значение припишем движению вправо, отрицатель-нос — движению влево.
При указанных допущениях законы сохранения имеют вид
![]() (15.1)
(15.1)
![]() (15.2)
(15.2)
Произведя соответствующие преобразования в выражениях (15.1) и (15.2), получим
![]() (15.3)
(15.3)
![]() (15.4)
(15.4)
откуда
![]() (15.5)
(15.5)
Решая уравнения (15.3) и (15.5), находим
![]() (15.6)
(15.6)
![]() (15.7)
(15.7)
Разберем несколько примеров.
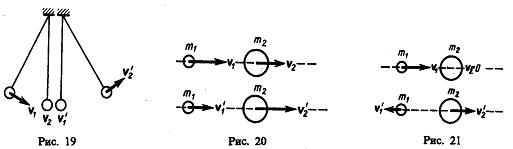
1. При v 2 =0
![]() (15.8)
(15.8)
![]() (15.9)
(15.9)
Проанализируем выражения (15.8) в (15.9) для двух шаров различных масс:
а) т
1
=т
2
. Если второй шар до удара висел неподвижно (v
2
=0) (рис. 19), то после удара остановится первый шар (![]() =
0), а второй будет двигаться с той же скоростью и в том же направлении, в котором двигался первый шар до удара (
=
0), а второй будет двигаться с той же скоростью и в том же направлении, в котором двигался первый шар до удара (![]() );
);
б) т
1
>т
2
. Первый шар продолжает двигаться в том же направлении, как и до удара, но с меньшей скоростью (![]() <
v
1
). Скорость второго шара после удара больше, чем скорость первого после удара (
<
v
1
). Скорость второго шара после удара больше, чем скорость первого после удара (![]() >
>![]() ) (рис. 20);
) (рис. 20);
в) т
1
<т
2
. Направление движения первого шара при ударе изменяется—шар отскакивает обратно. Второй шар движется в ту же сторону, в которую двигался первый шар до удара, но с меньшей скоростью, т. е. ![]() <
v
1
(рис. 21);
<
v
1
(рис. 21);
г) т
2
>>т
1
(например, столкновение шара со стеной). Из уравнений (15.8) и (15.9) следует, что ![]() = –
v
1
,
= –
v
1
, ![]() »2m
1
v
1
/
m2
»0.
»2m
1
v
1
/
m2
»0.
2. При т 1 =т 2 выражения (15.6) и (15.7) будут иметь вид
![]()
т. е. шары равной массы «обмениваются» скоростями.
Абсолютно неупругий удар — столкновение двух тел, в результате которого тела объединяются, двигаясь дальше как единое целое. Продемонстрировать абсолютно неупругий удар можно с помощью шаров из пластилина (глины), движущихся навстречу друг другу (рис. 22).
Если массы шаров т 1 и т 2 , их скорости до удара v1 и v2 , то, используя закон сохранения импульса, можно записать
![]()
где v — скорость движения шаров после удара. Тогда
![]() (15.10)
(15.10)
![]()
Вследствие деформации происходит «потеря» кинетической энергии, перешедшей в тепловую или другие формы энергии. Эту «потерю» можно определить по разности кинетической энергии тел до и после удара:
![]()
Используя (15.10), получаем
![]()
Если ударяемое тело было первоначально неподвижно (v 2 = 0), то
![]()
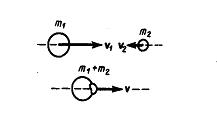
рис 22