| Скачать .docx |
Курсовая работа: Курсовая работа: Перетворювач СКЗ змінної напруги
Зміст
1) Вступ ______________________________________________________
2) Вихідні дані _________________________________________________
3) Огляд можливих технічних рішень ______________________________
пов’язаних з проектуванням перетворювача.
Питання вимірювання змінної напруги та струму.
4) Прецизійний мікропроцесорний вольтметр ________________________
5) Опис структурної схеми проектованого пристрою __________________
6) Алгоритм роботи проектованого пристрою________________________
7) Розробка апаратної частини_____________________________________
8) Розрахунок неінвертуючого вхідного підсилювача напруги __________
9) Оцінка похибки пристрою ______________________________________
10) Програмна частина ____________________________________________
11) Короткий опис конструкції _____________________________________
12) Додатки _____________________________________________________
13) Список літератури ____________________________________________
Вступ
Відмінними властивостями мікропроцесора (МП),які виділяються серед інших різновидів великих інтегральних схем (ВІС) , являються широкі функціональні можливості та універсальність їх примінення.
Це визначає значний діапазон використання МП. Поряд з такими характерними областями застосування засобів обчислювальної техніки ,як калькулятори , спеціальні обчислювачі, контролери, міні- і мікро ЄОМ, мікропроцесори успішно використовуються в пристроях управління технологічними процесами, в системах зв”язку , в побутовій радіо- і електроапаратурі.
Широкою областю застосування мікропроцесорів є вимірювальна техніка. Поява перших мікропроцесорнихвимірювальних приладів, так званих “інтелектуальних” приладів , визначило нове направлення розвитку приладобудування. По мірі вдосконалення мікропроцесорної техніки складність таких приладів зростає і у ще більшій мірі реалізуються можливості мікропроцесорів. Примінення МП визначило новий підхід як до проектуваня, так і до експлуатації вимірювальних приладів.
Основним завданням при проектуванні вимірювальних приладів було і залишається досягнення певних метрологічних характеристик . На різних етапах розвитку обчислювальної техніки ця задача вирішувалась різними методами. Ці і технологічні методи, які зводились до вдосконалення технології, і конструктивні, і структурні. Структурні методи отримали особливий розвиток при створенні цифрових вимірювальних вимірювальних приладів. Покращення метрологічних характеристик і розширення функціональних можливостей приладів досягалось реалізацією певних структур, які знаходяться у більшості випадків евристичним шляхом. Вдосконалення елементної бази і велика інтеграція цифрових схем привели до розробки структурно-алгоритмічних методів , в яких вдосконалені вдосконалені структури сполучаються з реалізацією обчислювальних операцій. Приміненя зазначених методів дозволило виконувати автоматичну корекцію низки похідних вимрювань , сполучити різні методи перетворення форми інформації і забеспечувати при цьому високу швидкодію і розширення функціональних можливостей приладів.
Прикладами реалізації структурно-алгоритмічних методів виявляються конвеєрний аналого-цифровий перетворювач (АЦП), інтегруючий перетворювач двохтактного інтегрування з корекцією похідних, інтегруючий функціональний АЦП з кусково-лінійною апроксімацією, логарифмічний АЦП.
Примінення МП змінює не тільки структуру цифррової частини приладів. Значні обчислювальні можливості МП дозволяють використовувати більш складні алгоритми роботи. При цьому знижуються вимоги до аналогової частини вимірювального приладу і забеспечуються високі метрологічні та експлуатаційні характеристики.
Вихідні дані
Вхідні сигнали
0.01 … 0.1 B
f = 1 ... 30 кГц
Вихідні сигнали
0.2....5 В
t < 0.20
Похибка (основна)
0.5 %
Вимоги
Maxзначення до 20 знаків
1 Огляд можливих технічних рішень повя”заних
з проектуванням перетворювача .
1.1 Питання вимірювання змінної напруги та струму.
Застосування приладів прямого перетворення.
Для вимірювання діючого значення змінних струму і напруги промислової частоти найчастіше користуються електромагнітними , електро- та феродинамічними приладами, а на підвищених частотах – термоелектричними , електростатичними, випрямними, електронними і цифровими. Середнє та амплітудне значення вимірюють відповідними випрямними і електронними приладами.
Схеми вимірювання однофазних струму і напруги при безпосередньому ввімкненні амперметрів або вольтметрів у досліджуване коло аналогічні відповідним схемам на постійному струмі (рис 1.1.1 а,б).
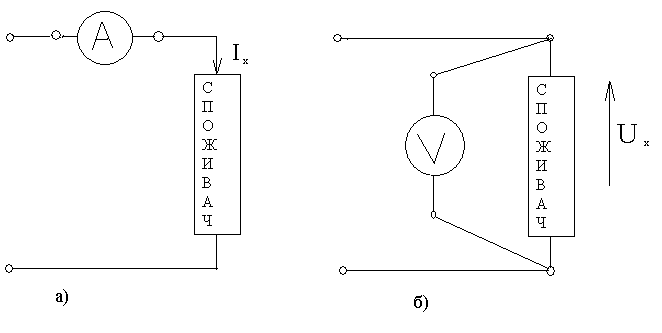
Рис. 1.1.1 Схеми вимірювання постійногоструму і напруги.
Єлектромагнітними амперметрами можна безпосередньо вимірювати струми до 300 А (прилади інших систем випускають на струми до 10 А). Для розширення меж вимірювання амперметрів зміного струму використовують вимірювальні трансформатори струму
Похибка вимірювання складається з похибок амперметра і коефіцієнта трансформації. Щоб зменшити вплив останньої , клас точності вимірювального трансформатора беруть завжди вищим, ніж у амперметра.
Схему, наведену на рис 1.1.2,а можна застосовувати і для вимірювання струмів окремих фаз у трифазних колах. Якщо напруга досліджуваного кола перевищує 600В
то вторинну обмотку і корпус трансформатора заземляють.
Особливістю схеми поданої на рис 1.1.2б є можливість вимірювання струмів усіх трьох фаз трипровідної мережі при застосуванні лише двох вимірювальних трансформаторів струму. При рівності коєфіцієнтів трансвормації обох трансформаторів струм за показом амперметра А2 буде пропорційний геометричній сумі І1+І3 , яка для трипровідної трифазної мережі за модулем дорівнює І2 при будь– якому розподілі навантаження між фазами . Аналогічно в чотирипровідній трифазній мережі можна вимірювати чотири струми при застосуванні трьох трансформаторів струму (рис 1.1.2,в)
Напруги, значення яких перевищують 600В , вимірюють застосовуючи вимірювальні трансформатори напруги
Для схеми а)
Ux = Ku*Uv ,
Де Ku –коефіцієнт трансформації трансформатора напруги ;
Uv– напруга за показом вольтметра.
На похибку вимірювання впливає похибка коефіцієнта трансформації трансформатора напруги, тому треба , щоб його клас точності був завжди вищим ніж у вольтметра.
Для вимірювання напруги в трифазних колах найчастіше користуються схемою поданою на рис 1.1.3 б , у якої для вимірювань трьох лінійних напруг використано лише два трансформатора напруги.
Для вимірювання високих змінних напруг (до 300 кВ) можна також застосувати електростатичні вольтметри .
Компенсаційний метод вимірювань.
Компенсатори змінного струму застосовуються для вимірювань струму й напруги переважно тоді , коли крім модуля треба визначити і фазу вимірювальної величини.
Взагалі принципи їх застосування є такими самими, як і для компенсаторів постійного струму. Зокрема , для розширення меж вимірювання напруги застосовують подільники напруги ; вимірювання струму здійснюється через вимірювання спаду напруги на відомому опорі ; залишаються в силі і рекомендації щодо вибору значення зразкового опору та коефіцієнта ділення подільника напруги.
Проте застосування цих компенсаторів має ряд особливостей. Так , наприклад , у подільниках напруги, а також при вимірюванні струму застосовують безреактивні або частотно – скомпенсовані резистори. Можливе також використання індуктивних або ємнісних подільників напруги (особливо на підвищених частотах).
Умови компенсації виконуються лише при однакових частотах компенсуючої та вимірюваної напруги, тому живлення кола робочого струму компенсатора і досліджуваного об”єкта здійснюється від одного джерела (живлення від різних джерел можливе при умові жорсткої синхронізації , наприклад від двох генераторів, ротори яких з”єднані для спільного обертання ). Гальванічне розділення кіл компенсатора і досліджуючого об”єкта забеспечується застосуванням трансформатора Тр.
При визначенні кута зсуву фаз змінного струму або напруги слід памятати про необхідність встановлення початкового положення вектора , від якого ведеться відлік. При використані прямокутно-координатного компенсатора за початковий приймають вектор струму живлення компенсатора , який збігається вектором напруги координати Х. Використовуючи допоміжний фазорегулятор , фазу струму можна сумістити з фазою того вектора напруги (або струму) досліджуваного кола , від якого бажано проводити відлік.
Вимірювання змінного струму й напруги з високою точністюю.
Компенсатори зміного струму та прилади прямого претворення забеспечують вимірювання струму й напруги з похибкою , що не первищує 0.1% . Для точніших вимірювань застосовують компаратори – пристрої для порівняння змінного струму (напруги) з сталою напругою. Спрощені схеми вимірювання струму й напруги з допомогою термоелектричного компаратора , найбільш поширеного на практиці , подано на рис 1.1.5
Для порівняння діючих значень постійного і змінного струмів використовують термоелектричний перетворювач (ТП) , що складається з нагрівача і термопари , та мікровольтметр. Спочатку перемикач П ставлять в положення 1 (рис. 1.1.5,а) і через нагрівач ТП пропускають вимірюваний змінний струм Іx. Внаслідок нагрівання робочого спаю термопари струмом Іх на її вільних кінцях утворюється е.р.с. Етх , значення якої пропорційне квадрату діючого значенню струму Іх тобто
Етх = Ктп Іх 2 ,
Де Ктп – коефіцієнт перетворення ТП.
Вимірявши з допомогою мілівольтметра Етх , перемикають П в положення 2 і регулюють значення постійного струму, щоб дістати е.р.с. Еtn , яка дорівнює Етх .
Враховуючи що Еtn =Kt п *Іn 2 (значення Ктп для постійного і змінного струмів мають бути однаковими), маємо In 2 =Ix 2 або In =Ix (для діючих значень). Таким чином , вимірявши компенсатором постійного струму значення Іn , визначаємо Іх .
На відміну від схеми вимірювання струму , схема вимірювання напруги має додатковий опір Rд до нагрівача. Для розширення меж вимірювання струму компаратором можна застосувати шунти. Похибки вимірювання змінного струму та напруги залежать в основному від рівності значень коефіцієнта перетворення Ктп на постійному і змінному струмі. Вони зростають із збільшенням частоти внаслідок впливу поверхневого ефекту в нагрівачі і паразитних провідностей. Для підвищення точності “запамятовування” е.р.с. Ет замість мілівольтметра використовують компенсатор постійного струму.
Промислові зразки термоелектричних компараторів забеспечують вимірювання змінного струму і напруги в межах від 2-10-5 до 10 А та від 0.05 до 300 В з похибкою порядку 0.05-0.2 % в діапазоні частот 20Гц - 200 кГц. Вони використовуються в основному для градуювання та перевірки найточніших амперметрів та вольтметрів змінного струму (особливо на підвищених частотах) .
Особливості вимірювань несинусоїдних струмів та напруг.
Для вимірювань несинусоїдних струмів і напруг слід користуватись приладами , робочий частотний діапазон яких охоплює всі ті гармонічні складові досліджуваного сигналу, нехтування якими може викликати недопустимо великі похибки вимірювання . таким чином найбільш раціонально застосовувати прилади , які мають широкий робочий діапазон частот. Зокрема , для вимірювання діючих значень несинусоїднихструмів і напруг найкраще користуватись термоелектричними та електростатичними приладами , для вимірювання середніх значень – спеціальними випрямними та електронними , шкали яких градуйовані в середніх значеннях, а для вимірювання амплітуди значень напруг – електронними піковими вольтметрами.
Переважна більшість випрямних та електронних (в тому числі цифрових) приладів
мають шкали , градуйовані в діючих значеннях змінного струму і напруги , хоча насправді їх покази пропорційні середнім або амплітудним значенням . Незважаючи на широкий робочий діапазон частот, такі прилади не слід застосовувати для вимірювання діючих значень несинусоїдних струмів і напруг , тому що вони градуюються лише строго для синусоїдної форми кривої і при вимірювання несинусоїдних струмів і напруг можуть давати значні похибки.
Наприклад , похибка спричинена відхиленням форми кривої досліджуваного сигналу від синусоїдної для приладів , покази яких пропорційні середнім значенням
d = ((1.11- Кф )/Кф )*100,
де 1.111 і Кф – відповідно коефіцієнти форми кривої для синусоїди та досліджуваного сигналу , а для приладів , покази яких пропорційні амплітудним значенням ,
dа = ((Ка -Ö2) / Ö2)*100,
де Ка – відношення амплітудного значення досліджуваного сигналу до діючого (коефіцієнт амплітуди , або пікфактор).
Враховуючи сказане , для вимірювань діючих значень несинусоїдних струмів і напруг слід використовувати лише ті випрямні й електронні прилади (в тому числі і цифрові) , які призначені для цього і покази яких не залежать від форми кривої досліджуваного сигналу.
Для спостереження та реєстрації миттєвих значень несинусоїдних струмів і напруг можна користуватись електронними та електростатичними осцилографами.
1.2 Прецизійний мікропроцесорний вольтметр .
Структурна схема мікропроцесорного вольтметра показана на рис. 1.2.6. Використання МП дозволило вмістити в одному пристрої функції декількох вимірювальних приладів : цифрового вольтметра постійного струму , автоматичного потенціометра ; диференціального компаратора напруги ; вимірювача відношення напруги ; вимірювача потужності ; вимірювача нестабільності . Співвідношення автоматичної корекції похибки з високо лінійним цифро аналоговим перетворювачем , який виконується на основі індуктивних подільників напруги , дозволило досягнути високих метрологічних характеристик . В приладі реалізований компенсаційний метод перетворювача
Мікропроцесор використовується як для виконання функцій управління і обробки вимірювальної інформації, так і для сервісних функцій.
Режими роботи приладу задаються або оператором або дистанційно від зовнішніх пристроїв через інтерфейс типу ЛКП. Мікропроцесор переводить прилад у відповідний режим роботи , який розшифровує стан органів управління . Органи управління мікропроцесорного вольтметра виконані у вигляді перемикачів кнопочних без фіксації стану.
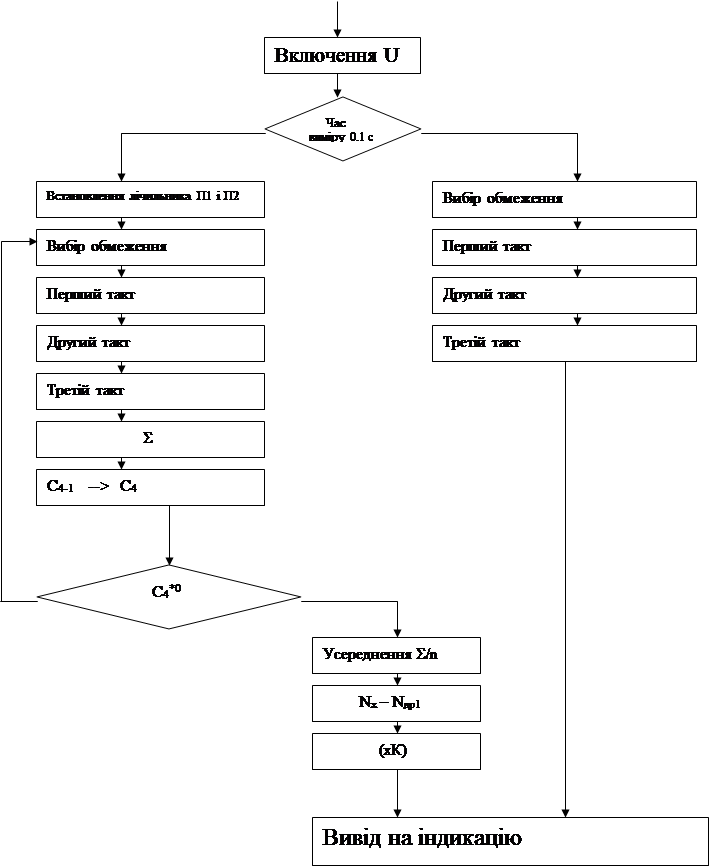
В залежності від вибраної швидкодії (час вимірювання встановлюється 0.1; 1 і 10 с) в приладі передбачено забезпечення чутливості , яка відповідає 4.5 ; 6.5 і 7.5 десятковим розрядам в межах 100 мВ ; 1 В ; 10 В ; 100 В , при цьому вимірювання здійснюється або в два такти , або в три такти , або в три такти з усередненням.
Вхідні наруги через перемикач П поступають на АЦП. В першому такті визначається два старших значущих розрядів. Інформація з виходу АЦП через МП поступає на вхід ЦАП1 . На виході ЦАП1 формується різницевий сигнал , який через перемикач П поступає на вхід АЦП. В другому також відбувається перетворення отриманої різниці в код і визначення двох наступних значущих розрядів . Цей код поступає на ЦАП2. На виході ЦАП2 формується різниця між вихідними напругами ЦАП1 і ЦАП2. Отримана різниця в третьому такті через перемикач П перетворює АЦП в код , який поступає в МП . Мікропроцесор використовується як для управління АЦП і ЦАП, так і для отримання результативного коду. Для підвищення точності в приладі передбачено усереднення від 10 до 100 вимірювань.
Спрощена структурна схема програми вимірювання показана на рис.1.2.2 . Обчислення Nx – Nдр відповідає проведенню корекції адитивної похибки. Ця операція проводиться в будь-якому режимі вимірювання. При роботі приладу в три такти вимірювання (n1=1) або при роботі з усередненням (n2 = 10...100) , коли необхідно забезпечити відповідно 6.5 і 7.5 десяткових розрядів , передбачена корекція мультиплікативної похибки – операція (ХК).
|
ні так
ні так
2. Опис структурної схеми проектованого пристрою.
Структурна схема – це ряд елементів , кожний з яких можна представити як окремий пристрій , що виконує свої визначені функції.
Розроблений пристрій повинен містити наступні структурні блоки :
1 Вхідний блок. Призначений для перетворення вхідної напруги до нормалізованого , яке можна подавати на вхід схеми АЦП. Крім цього даний блок узгоджує вхідний і вихідний опір схеми.
2 Блок АЦП. З допомогою якого відбувається перетворення значень напруги що поступає з вхідного блоку в код. N - розрядний вихідний код АЦП через буферні схеми подається на системну шину даних (ШД)
3 Блок арифметичних операцій. На даному етапі відбувається обчислення діючого значення напруги. Обчислення СКЗ здійснюється послідовністю арифметичних операцій , що реалізуються формулою :
Uскз = Ö(1/M)SI=1 m *U1 2 (2.1)
Даний блок реалізується в МП програмно
4 ROM (ReadOnlyMemory) – постійна пам’ять , призначена для зберігання коду програм та деяких даних про систему (системних констант). ROM через шинні формувачі під’єднюється до системної шини даних ШД.
5 RAM (RandomAccessMemory) – необхідна для зберігання оперативних даних , результатів вимірів та ходу програми RAM підєднюється до ШД.
На рис. 2.1 зображена структурна схема пристрою перетворення СКЗ напруги спроектованого на базі МП комплекту.
МП – мікропроцесор;
СУ – сигнали управління;
СІ - системний інтерфейс;
ШУ – шина управління;
ШД – шина даних ;
ША – шина адреса.
3 Алгоритм роботи проектованого пристрою.
1 На вхід пристрою поступає гармонійний сигнал
U(t) = Um sin(wt +j),
Де Um – амплітудне значення вхідної напруги ;
w - кругова частота w = 2p¦ ;
j - деяка початкова фаза сигналу .
2 Оскільки амплітуда вхідного сигналу лежить в межах 0.001-0.1 В її необхідно підсилити до рівня допустимого вхідного сигналу АЦП. Для цього використовується масштабуючий підсилювач напруги. Використання високочастотних елементів дає підставу знехтувати впливом похибки тракту перетворення напруги в напругу на сумарну похибку приладу.
Послідовне включення операційного підсилювача з 100% зворотнім зв’язком збільшує вхідний опір приладу до десятків МОм , що практично виключає спотворення вхідного сигналу самим пристроєм вимірювання.
3 На АЦП за час tз відбувається перетворення аналогового сигналу в N – розрядний код , який через буферні регістри зчитується по ШД мікропроцесором. Час дискретизації t0 залежить від виду використовуваного АЦП. Кількість розрядів АЦП -N – вибирається з умови забезпечення необхідної точності квантування .
4 Обчислення СКЗ напруги буде проводитись на підставі М вибірок (значень) величини U(t) виміряних протягом одного періоду напруги U(t)
М - кількість вибірок за період Т ;
H – крок інтегрування
За період Т в МП з АЦП поступає М вибірок , які записуються послідовно з RAM.
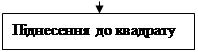
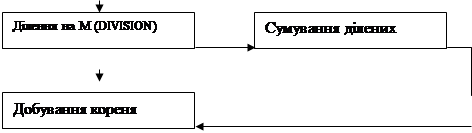
5 При поступленні М-ої (останньої за період) вибірки МП відключає АЦП від системної ШД і починає обробку прийнятих даних з метою обчислення СКЗ напруги. При цьому МП буде виконувати наступну послідовність дій :
- підсилення значення всіх вибірок до квадрату ;
- сумування квадратів вибірок ;
- ділення суми на кількість вибірок М;
- добування кореня квадратного з діленого.
6 Обчислений результат (діюче значення напруги) зберігається в спеціальній області оперативної памяті.
7 Для здійснення наступного виміру алгоритм починається з пункту 1.
Для обчислення інтеграла можуть використовуватись різні чисельні методи :
а) Метод прямокутників.
б) Метод трапецій :
с) Метод Сімпсона:
4 Розробка апаратної частини.
На даному етапі проектування особливу увагу слід приділити вибору таких основних компонентів пристрою як : АЦП, МП комплект , постійна память , оперативна память.
При виборі АЦП основним критерієм буде забезпечення необхідної точності перетворення аналогової величини в код.
Мінімальну кількість розрядів АЦП обчислюють за наступною формулою :
N = I*log2 (100/dкб )
Де dкб – середньоквадратична похибка квантування .
В наступному випадку маємо :
N = ]log2 (100/0.05)[= 11 ;
Крім необхідної кількості розрядів АЦП повинен мати статичну і динамічну похибки перетворення .
Цим вимогам задовольняє високоточний дванадцятирозрядний АЦП послідовного наближення К 1108 ПВ2
Коротка характеристика мікросхеми К 1108 ПВ2 :
- нелінійність dі = ± 2МР (молодших розрядів) ;
- диференційна нелінійність dді = 1 (МР)
- час дискретизації 2,6 мкс ;
- напруга внутрішнього джерела опорної напруги 2,6 В;
- струми споживання Ісс1 =60 мА ; Ісс2 =150 мА.
Центральний МП буде виконувати наступні функції :
1) Управління роботою пристрою;
2) Обробка даних, знятих з АЦП, з метою обчислення СКЗ напруги;
3) Запам’ятовування 2500 попередніх вимірів .
Враховуючи низьку частоту вхідного аналогового сигналу особливих вимог до швидкодії МП не ставиться. Пристрій в цілому повинен характеризуватися по таким параметрам :
а) простотою реалізації ;
б) простотою програмування;
в) дешевизною виконання;
г) малогабаритністю конструкції;
д) можливістю перепрограмування на виконання іншої задачі.
Взявши до уваги вище перелічені вимоги , а також з інших поглядів доцільним бачиться використання МП комплекту КР 580. Центральний процесор на базі МП КР580ИК80А , має 8-розрядну шину даних , 16 – розрядну шину адрес та 5- розрядну шину управління.
Спряження 12-розрядного АЦП та 8 розрядної системної ШД здійснюється за допомогою двох 8-розрядних регістрів памяті КР580ИР82. Таким чином 12- розрядний код АЦП розбивається на 2 слова по 8 біт.
Орієнтований розрахунок об”єму необхідної пам”яті.
В системі необхідно має бути постійна (ROM) та оперативна (RAM) пам”яті.
В ROM зберігається код програми , тому і об”єм постійної памяті і буде визначатись довжиною основної програми та всіх інших підпрограм.
Команди мови Асемблер мають довжину 1-3 байти. Знаючи сумарну кількість команд основної програми MAIN та памяті підпрограм (див розділ 6)
Можна обчислити об”єм необхідної ROM.
ROM=MAIN_LONG*3+SQRT_LONG*3+SUM_LONG*3+POWER_LONG*3+DIVISION_LONG*3+MAKE_SURE_LONG*3
При чому :
MAIN_LONG– кількість команд в основній програмі;
SQRT_LONG – кількість в програмі SQRT;
SUM_LONG – кількість в підпрограмі SUM;
POWER_LONG – кількість в підпрограмі POWER;
DIVISION_LONG – кількість в підпрограмі DIVISION;
MAKE_SURE_LONG – кількість в підпрограмі MAKE_SURE.
Підставивши чисельні значення дістанемо :
ROM=39*3+300*3+20*3+70*3+70*3+30*3=1587 байт
При виборі ВІС памяті ROM необхідно також врахувати те, щоб вона мала 8-розрядну шину даних (для спряження з МП комплектом , КР 580)
Враховуючи вище вказані вимоги до об”єму та способу спряження ROM доцільним є використання постійної памяті на базі ВІС К573РФ8
Коротка характеристика ВІС К573РФ8
- ємність 2048 (2 кБ);
- час вибірки адреси 350 мс;
- струм споживання 100 мА;
- час зберігання інформації при відключеному живленні =2500 год;
- тип корпусу 2121 , 28-8.
Оперативна память (RAM) використовується для тимчасового зберігання проміжних та кінцевих результатів роботи програми , а також для запам’ятовування оперативної інформації (стек).
В даному пристрої в RАM записується 2500 значень вимірів , кожне з яких має довжину 2 байти. Крім цього в оперативну память записується М двохбайтових вибірок (за період Т вхідної напруги U(t)). При частоті дискретизації АЦП Fд =10 кГц і частоті вхідної напруги f=2.0 Гц , маємо М=Fд /f=10/2.0=5
Це число задовільняє співвідношенню теореми Котельникова. Під стек і проміжні результати обчислень виділимо 300 байт . Тоді сумарний об”єм RAM складає :
2500*2+5*2+300=5310 байт
Як і в ROMшина данихRAM повинна мати 8 розрядів. Враховуючи це , а також об”єм RAMбудуємо оперативну пам”ять на базі трьох ВІС К537РУ8
Коротка характеристика мікросхеми К537 РУ8.
- має тристабільний вхід, в режимах зберігання і запису керується трьома сигналами
- обмін інформацією відбувається по двохнаправленій шині даних;
- об”єм пам”яті 2048 біт;
- час вибірки 190 мс;
- час звертання 320 мс;
- струм споживання 100 мА
При розрахунку попереднього підсилювача напруги визначимо його коефіцієнт передачі.
За еквівалентною схемою складаємо повну матрицю провідностей:
Виключаємо базовий вузол, при цьому скорочена матриця буде мати вигляд:
| Y1 -Y1 0 0 |
| -Y1 Yвх +Y1 +Yc -Yвх 0 |
Y= | 0 -Yвх Y2 +Y3 +Yвх +Yc -Y2 |
| 0 -кYвих kYвих –Y2 Y2 +Yвих |
Коефіцієнт передачі по напрузі як і в попередньому випадку визначається з рівняння
К14 =D14 /D11 ;
| -Y1 Yвх +Y1 +Yc -Yвх |
D14 = | 0 -Yвх Y2 +Y3 +Yвх +Yc | = kYвих (Y2 +Y3 )Y1
| 0 -кYвих kYвих – Y2 |
| Yвх +Y1 +Yс -Yвх 0 |
D11 = | -Yвх Y2 +Y3 +Yвх +Yс -Y2 |=
| - кYвих kYвих – Y2 Y2 +Yвих |
=Y1 (Y2 +Y3 )Yвих +Y2 Y1 (kYвих -Y2 )=kYвих Y2 Y1
K14 =(kYвих (Y2 +Y3 )Y1 )/(kYвих Y2 Y1 ) = 1+(R2 /R3 )
В якості операційного підсилювача вибираємо мікросхему К140УД1В
Задаємо значення R1 =10кОм.
Тоді
R2 =kR3 -R3
Так як коефіцієнт передачі по напрузі даного підсилювача повинен бути рівним 50 то
R2 =50*10*103 – 10*103 = 490 kOm
Оскільки в номінальному ряді опорів немає такого номіналу , то набираємо R2 з двох опорів
R2 =R2 ¢+R2 ¢¢ R2 ¢=470 kOm i R2 ¢¢=39 kOm,
Причому R2 ¢¢ буде змінним опором.
5 Оцінка похибки пристрою.
В проектованому пристрою основний вклад в похибку буде вносити тракт аналогово- цифрового перетворення , а також методичну похибку внесе чисельний метод визначення інтегралу.
При аналого-цифровому перетворенні виникають як статичні, так і динамічні похибки.
Перші є результатом відхилення реальної статичної характеристики АЦП від прямої лінії , другі – результат зміни вхідного сигналу за час дискретизації tд .
При вхідному сигналі U(t) АЦП частотою 60 Гц і час дискретизації АЦП tд =7.6 мкс – динамічна похибка буде надзвичайно малою (зміна U(t)) = Um *sinwtза час 2.6 мкс). Тому при обчисленні похибки АЦП будемо враховувати тільки її статичну складову.
dАЦП =100/2N ; (5.1)
dАЦП =100/212 =100/4096;
Похибка чисельного методу :
dU.M = h2 ((b-a)/24)max[a,b] |(sin2 x)¢¢|
при М=200 отримаєм dU.M = 0.014% ; dпр =dАЦП +dU.M
6 Програмна частина.
Програмне забезпечення , що керує роботою пристрою, має блочну структуру і складається з основної програми MAIN та п’яти підпрограм.
1 п/п SQRT – реалізує добування кореня квадратного з чотирьохбайтного числа;
2 п/п POWER – підносить двохбайтне число до квадрату ;
3 п/п DIVISION – ділить чотирьохбайтне число на двохбайтне;
4 п/п SUM – сумує М двохбайтних чисел;
6 п/п MAKE_SURE – перевіряє , чи напруга U(t) знаходиться в фазі І-ї вибірки.
В системі прийняті наступні адреси по пристроях :
0000 – 1FFF – тригер
2000 – 3FFF – регістр RG1
4000 – 5FFF – регістр RG2
6000 – 7FFF – вхід АЦП ERD ;
8000 – DFFF – RAM;
E000 – FFFF – ROM.
Блок-схема програми MAIN.
|
||||
 |
||||
![]() ні
ні
![]()
![]() так
так
|
||||
 |
||||
 |
||||
|
||||
|
||||
 |
||||
 |
||||
Лістинг основної програми :
LXI H, 9000 H
LXI B, 8000 H
S1 LDA 4000 H
ANA 80 H
IZ S1
LDA 2000 H
INX B
STAX B
LDA 4000 H
INX B
STAX B
LDA 1EEEH
CAU MAKE_SURE
INZ SI
S2 LPAX B
MOV D,A
DCX D
MOV E,A
DCX B
CALL POWER
MOV A,B
XRI 80H
INZ S2
MOV A,C
XRI 01H
INZ S2
CALL SUM
CALL DIVISION
CALL SQRT
MOV H,A
CDI 99H
INZ 53
MOV A,L
CPI C 4H
INZ 53
LXI H, 9000 H
STAX D
IMP S1
7 Короткий опис конструкції.
Прилад являє собою функціонально закінчений пристрій і може працювати з любим засобом відображення , що мають цифрові входи.
Конструктивно прилад являє собою шассі до якого за допомогою чотирьох гвинтів М6 кріпиться плата.
Робоче положення приладу – вертикальне.
Елементи припаюють до плати припоєм Пр 3 ПОС – 61 ГОСТ 21931- 76 . Для захисту від пошкоджень і корозії плата покривається лаком ЕП- 730 ГОСТ 20834 – 81
Прилад розрахований на роботу в лабораторних умовах.
Список літератури:
1 Зиссос Д. Проектування систем на мікропроцесорах. Переклад з англ. Під редакцією А.И.Петренка. – К : Техніка , 1982 –170 с
2 Кіріанакі А.В. , Гайдучак Р.М “Цыфровые измерения частотно-временных параметров сигналов”. Львів Вища школа , 1987
3 “Микропроцессоры и микропроцесорные комплекты и интегральные микросхемы” Шахнова .И.М Радио и связь1988 г.
4 Коган Б.М , Станих В.В. “Микропроцессоры в цифровой системе”
М : Энергия – 1979 г.
Міністерство освіти і науки України
Національний університет “Львівська політехніка”
Курсовий проект
на тему:
“Перетворювач СКЗ змінної напруги”
Виконав :
Студент гр. СТА 52
Гасюк І.А
Перевірив:
Наконечний