| Похожие рефераты | Скачать .docx |
Реферат: Синхронные машины. Машины постоянного тока
Синхронные машины. Машины постоянного тока
Учебное пособие
1. Синхронные машины
1.1 Принцип действия синхронной машины
Статор 1 синхронной машины (рис. 1.1, а ) выполнен так же, как и асинхронной: на нем расположена трехфазная (в общем случае многофазная) обмотка 3. Обмотку ротора 4, которая питается от источника постоянного тока, называют обмоткой возбуждения, так как она создает в машине магнитный поток возбуждения.
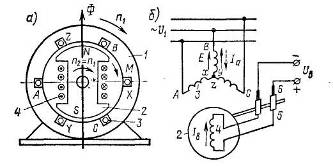
Рис. 1.1 – Электромагнитная схема синхронной машины (а) и схема ее включения (б):
1 – статор, 2 – ротор, 3-обмотка якоря, 4 – обмотка возбуждения,
5 – контактные кольца, 6 – щетки
Вращающуюся обмотку ротора соединяют с внешним источником постоянного тока посредством контактных колец 5 и щеток 6. При вращении ротора 2 с некоторой частотой n 2 поток возбуждения пересекает проводники обмотки статора и индуктирует в ее фазах переменную э. д. с. E (рис. 1.1, б ), изменяющуюся с частотой
f1 =pn2 /60 (1.1)
Если обмотку статора подключить к какой-либо нагрузке, то протекающий по этой обмотке многофазный ток Ia создаст вращающееся магнитное поле, частота вращения которого
n1 =60f1 /p. (1.2)
Из (1.1) и (1.2) следует, что n 1 = n 2 , т.е. ротор вращается с той же частотой, что и магнитное поле статора. По этой причине рассматриваемую машину называют синхронной. В такой машине результирующий магнитный поток Фрез создается совместным действием м. д. с. обмотки возбуждения и обмотки статора и результирующее магнитное поле вращается в пространстве с той же частотой, что и ротор.
В синхронной машине обмотку, в которой индуктируется э. д. с. и протекает ток нагрузки, называют обмоткой якоря, а часть машины, на которой расположена обмотка возбуждения, – индуктором. Следовательно, в машине, выполненной по конструктивной схеме, представленной на рис. 1.1, статор является якорем, а ротор – индуктором. С точки зрения принципа действия и теории работы машины безразлично, вращается якорь или индуктор, поэтому в некоторых случаях применяют синхронные машины с обращенной конструктивной схемой: обмотка якоря, к которой подключена нагрузка, расположена на роторе, а обмотка возбуждения, питаемая постоянным током, – на статоре.
Синхронная машина может работать автономно в качестве генератора, питающего подключенную к ней нагрузку, или параллельно с сетью, к которой присоединены другие генераторы. При работе параллельно с сетью она может отдавать или потреблять электрическую энергию, т.е. работать генератором или двигателем. При подключении обмотки статора к сети с напряжением U с и частотой f1 протекающий по обмотке ток создает, так же как в асинхронной машине, вращающееся магнитное поле, частота вращения которого определяется по (1.2). В результате взаимодействия этого поля с током I в , протекающим по обмотке ротора, создается электромагнитный момент М, который при работе машины в двигательном режиме является вращающим, а при работе в генераторном режиме–тормозным. Таким образом, в рассматриваемой машине в отличие от асинхронной поток возбуждения (холостого хода) создается обмоткой постоянного тока, расположенной на роторе. Поэтому в установившихся режимах ротор неподвижен относительно магнитного поля и вращается вместе с ним с частотой вращения n 1 = n 2 , независимо от механической нагрузки на валу ротора или электрической нагрузки.
Таким образом, синхронная машина имеет следующие особенности, характерные для установившихся режимов работы:
а) ротор машины, работающей как в двигательном, так и в генераторном режимах, вращается с постоянной частотой, равной частоте вращающегося магнитного поля, т.е. n 2 = n 1 ;
б) частота изменения э. д. с. Е, индуктируемой в обмотке якоря, пропорциональна частоте вращения ротора;
в) в обмотке ротора э. д. с. не индуктируется, а ее м. д. с. определяется только током возбуждения и не зависит от режима работы.
1.2 Устройство синхронной машины
Конструктивная схема машины. Синхронные машины выполняют с неподвижным или вращающимся якорем. Машины большой мощности для удобства отвода электрической энергии со статора или подвода ее выполняют с неподвижным якорем (рис. 1.2, а)
Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3–3%), подвод постоянного тока к обмотке возбуждения с помощью двух колец не вызывает особых затруднений. Синхронные машины небольшой мощности выполняют как с неподвижным, так и с вращающимся якорем.
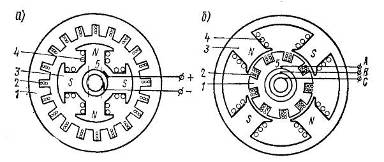
Рис. 1.2 – Конструктивная схема синхронной машины
с неподвижным и вращающимся якорем:
1 – якорь, 2 – обмотка якоря, 3 – полюсы индуктора,
4 – обмотка возбуждения, 5 – кольца и щетки
Синхронную, машину с вращающимся якорем и неподвижным индуктором (рис. 1.2, б )называют обращенной.
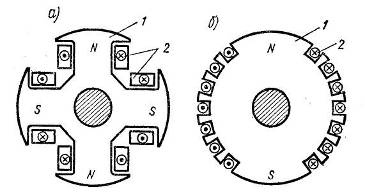
Рис. 1.3 – Роторы синхронной явнополюсной (а) и неявнополюсной (6) машин:
1 – сердечник ротора, 2 – обмотка возбуждения
Конструкция ротора. В машине с неподвижным якорем применяют две конструкции ротора: явнополюсную – с явно выраженными полюсами (рис. 1.3, а) и неявнополюсную – с неявно выраженными полюсами (рис. 1.3, б ). Явнополюсный ротор обычно используют в машинах с четырьмя и большим числом полюсов. Обмотку возбуждения выполняют в этом случае в виде цилиндрических катушек прямоугольного сечения, которые размещают на сердечниках полюсов и укрепляют при помощи полюсных наконечников. Ротор, сердечники полюсов и полюсные наконечники изготовляют из стали. Двух- и четырехполюсные машины большой мощности, работающие при частоте вращения ротора 1500 и 3000 об/мин, изготовляют, как правило, с неявнополюсным ротором. Применение в них явнополюсного ротора невозможно по условиям обеспечения необходимой механической прочности крепления полюсов и обмотки возбуждения. Обмотку возбуждения в такой машине размещают в пазах сердечника ротора, выполненного из массивной стальной поковки, и укрепляют немагнитными клиньями. Лобовые части обмотки, на которые воздействуют значительные центробежные силы, крепят при помощи стальных массивных бандажей. Для получения распределения магнитной индукции, близкого к синусоидальному, обмотку возбуждения укладывают в пазы, занимающие 2 /3 каждого полюсного деления.
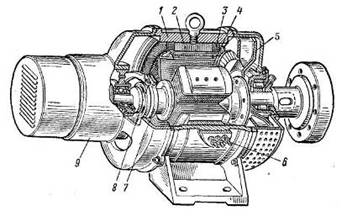
Рис. 1.4 – Устройство явнополюсной машины:
1 – корпус, 2 – сердечник статора, 3 – обмотка статора, 4 – ротор,
5 – вентилятор, 6 – выводы обмотки статора, 7 – контактные кольца,
8 – щетки, 9 – возбудитель
На рис. 1–4 показано устройство явнополюсной синхронной машины. Сердечник статора собран из изолированных листов электротехнической стали и на нем расположена трехфазная обмотка якоря. На роторе размещена обмотка возбуждения.
Полюсным наконечникам в явнополюсных машинах обычно придают такой профиль, чтобы воздушный зазор между полюсным наконечником и статором был минимальным под серединой полюса и максимальным у его краев, благодаря чему кривая распределения индукции в воздушном зазоре приближается к синусоиде.
В синхронных двигателях с явнополюсным ротором в полюсных наконечниках размещают стержни пусковой обмотки (рис. 1–5), выполненной из материала с повышенным удельным сопротивлением (латуни и др.). Такую же обмотку (типа «беличья клетка»), состоящую из медных стержней, применяют и в синхронных генераторах; ее называют успокоительной или демпферной обмоткой, так как она обеспечивает быстрое затухание колебаний ротора, возникающих при переходных режимах работы синхронной машины. Если синхронная машина выполнена с массивными полюсами, то в этих полюсах при пуске и переходных режимах возникают вихревые токи, действие которых эквивалентно действию тока в короткозамкну-тых обмотках. Затухание колебаний ротора при переходных процессах обеспечивается в этом случае вихревыми токами, замыкающимися в массивном роторе.
Возбуждение синхронной машины. В зависимости от способа питания обмотки возбуждения различают системы независимого возбуждения и самовозбуждения. При независимом возбуждении в качестве источника для питания обмотки возбуждения служит генератор постоянного тока (возбудитель), установленный на валу ротора синхронной машины (рис. 1.6, а ), или же отдельный вспомогательный генератор, приводимый во вращение синхронным или асинхронным двигателем.
При самовозбуждении обмотка возбуждения питается от обмотки якоря через управляемый или неуправляемый выпрямитель – полупроводниковый или ионный (рис. 1.6, б ). Мощность, необходимая для возбуждения, невелика и составляет 0,3–3% от мощности синхронной машины.
В мощных генераторах иногда кроме возбудителя применяют подвозбудитель – небольшой генератор постоянного тока, служащий для возбуждения основного возбудителя. В качестве основного возбудителя в этом случае может быть использован синхронный генератор совместно с полупроводниковым выпрямителем. В настоящее время питание обмотки возбуждения через полупроводниковый выпрямитель, собранный на диодах или на тиристорах, все более широко применяют как в двигателях и генераторах небольшой и средней мощности, так и в мощных турбо- и гидрогенераторах (тиристорная система возбуждения). Регулирование тока возбуждения I в осуществляется автоматически специальными регуляторами возбуждения, хотя в машинах небольшой мощности применяется регулирование и вручную реостатом, включенным в цепь обмотки возбуждения.
В последнее время в мощных синхронных генераторах начали применять так называемую бесщеточную систему возбуждения (рис. 8–6, в). При этой системе в качестве возбудителя используют синхронный генератор, у которого обмотка якоря расположена на роторе, а выпрямитель укреплен непосредственно на валу.
Рис. 1.5 – Размещение пусковой обмотки в синхронных двигателях:
1-полюсы ротора, 2-короткозамыкающие кольца, 3 – стержни беличьей клетки,
4 – полюсные наконечники
Обмотка возбуждения возбудителя получает питание от подвозбудителя через регулятор напряжения. При таком способе возбуждения в цепи питания обмотки возбуждения генератора отсутствуют скользящие контакты, что существенно повышает надежность системы возбуждения. При необходимости форсирования возбуждения генератора повышают напряжение возбудителя и увеличивают выходное напряжение выпрямителя.
1.3 Особенности конструкции машин большой мощности
Синхронные машины большой мощности являются весьма напряженными в конструктивном отношении: отдельные части машины имеют очень большие механические и электромагнитные нагрузки; по интенсивности нагрузок они превосходят все другие электрические машины. Поэтому в них выделяется большое количество тепла, что потребовало применения весьма интенсивного охлаждения.
Стремление получить максимальную мощность в заданных габаритах или минимальные габариты при заданной мощности, характерное для проектирования всех электрических машин, в синхронных машинах привело к появлению своеобразных конструкций, сильно отличающихся друг от друга и определяемых в основном типом первичного двигателя.
По конструкции крупные синхронные машины подразделяют на турбогенераторы, гидрогенераторы, дизель-генераторы, синхронные компенсаторы и синхронные двигатели.
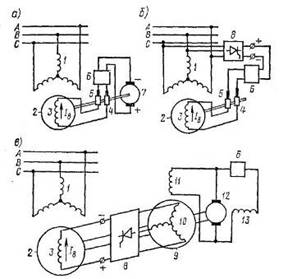
Рис. 1.6 – Схемы возбуждения синхронной машины:
1 – обмотка якоря генератора, 2 – ротор генератора, 3 – обмотка возбуждения,
4 – кольца, 5 – щетки, 6 – регулятор напряжэния, 7 – возбудитель, 8 – выпрямитель,
9 – ротор возбудителя, 10 – обмотка якоря возбудителя, 11 – обмотка возбуждения
возбудителя, 12 – под-возбудитель, 13 – обмотка возбуждения подвозбудителя
Турбогенераторы . Эти машины, приводимые во вращение быстроходными паровыми или газовыми турбинами, выполняют неявно-полюсными. Турбогенераторы, предназначенные для установки на тепловых электростанциях обычного типа, работают, как правило, при максимально возможной частоте вращения 3000 об/мин (имеют два полюса), что позволяет существенно уменьшить габариты и массу машины и паровой турбины. На атомных электростанциях реакторы вырабатывают пар с относительно низкими температурой и давлением. Поэтому для них более экономичными являются турбины и турбогенераторы с частотой вращения 1500 об/мин (имеют четыре полюса). Однако из-за этого значительно увеличивается диаметр ротора турбогенератора (при одинаковой мощности приблизительно в √2 раз).
Турбогенераторы выполняют с горизонтальным расположением вала ротора (рис. 1.7). При мощности до 30 МВт (турбогенераторы типа Т2) они имеют поверхностное или косвенное (посредством обдува) воздушное охлаждение, а при больших мощностях (турбогенераторы типа ТВ и ТВ2) – косвенное водородное.
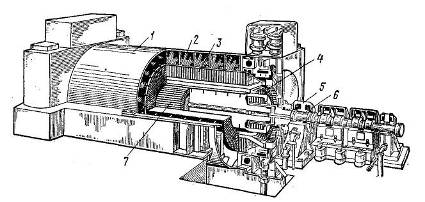
Рис. 1.7 – Общий вид турбогенератора ТВВ-1200–2:
1 – корпус, 2 – камеры для сбора и распределения охлаждающего газа, 3 – статор,
4 – обмотка статора, 5 – подшипник, 6 – вал, 7 – ротор
В турбогенераторах мощностью более 60 МВт применяют непосредственное внутреннее охлаждение проводов обмоток водородом, дистиллированной водой и трансформаторным маслом.
В турбогенераторах с косвенным водородным охлаждением избыточное давление водорода составляет (0,035 – 0,05)·105 Па, при этом исключается проникновение воздуха внутрь корпуса через неплотности и масляные уплотнения концов вала. Смесь водорода с воздухом взрывоопасна при содержании водорода в смеси от 7 до 70%, поэтому содержание водорода в корпусе поддерживается на уровне примерно 97%. Несмотря на это, корпус машины с водородным охлаждением обычно рассчитывают так, чтобы давление, развивающееся при возможном взрыве водорода, не повредило машину.
В турбогенераторах с непосредственным (внутренним) охлаждением охлаждающее вещество циркулирует внутри проводников обмоток (рис. 1.8, а) или по каналам, непосредственно соприкасающимся с проводниками (рис. 1.8, б, в). При использовании для этой цели водорода избыточное давление в машине повышается до (3–4)·105 Па, что обеспечивает значительное увеличение теплоемкости, коэффициента теплопередачи и способности к теплоудалению по сравнению с воздухом при атмосферном давлении (примерно в 3–4 раза). Еще большей способностью к теплоудалению обладают трансформаторное масло и вода (соответственно в 16,5 и в 125 раз больше, чем у воздуха).
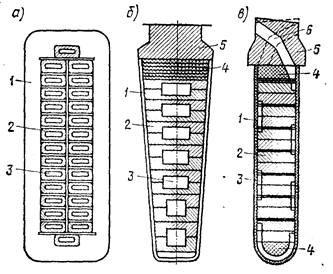
Рис. 1.8 – Выполнение внутренних каналов в обмотках статора (а) и ротора (б, в)
в турбогенераторах с непосредственным охлаждением:
1 – пазовая изоляция, 2 – полые проводники, 3 – каналы для прохода охлаждающего вещества, 4 – изоляционные прокладки, 5 – клин, 6 – канал для забора и выброса охлаждающего газа из зазора между ротором и статором
В настоящее время в СССР применяют следующие системы непосредственного охлаждения турбогенераторов:
а) аксиальная система охлаждения обмоток статора, ротора и сердечника статора водородом повышенного давления, который подается с помощью центробежного компрессора, проходит по аксиальным каналам сердечника статора и полым проводникам обмоток и поступает в газоохладитель, охлаждаемый водой (турбогенераторы типа ТГВ-200; ТГВ-300). При водородном охлаждении газоохладители встраивают в корпус статора или в концевые части машины;
б) многоструйная радиальная система охлаждения водородом повышенного давления, в которой обмотка ротора имеет непосредственное охлаждение, а обмотка статора – поверхностное (турбогенераторы типа ТВФ). При этом водород нагнетается двумя вентиляторами, установленными по концам вала, и разделяется на отдельные струи, которые охлаждают лобовые части обмоток статора и ротора, сердечник статора (проходя по радиальным каналам), обмотку ротора и наружные поверхности статора и ротора. Отдельные струи сходятся в центральной части машины и подаются оттуда в газоохладитель;
в) многоструйная радиальная система охлаждения сердечника статора и обмотки ротора водородом и одноструйная система охлаждения обмотки статора водой (турбогенераторы типа ТВВ);
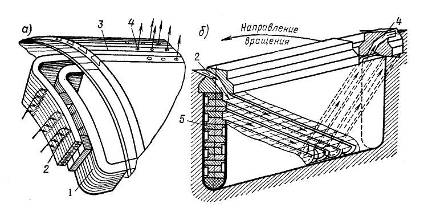
Рис. 1.9 – Схемы подачи водорода в проводники обмотки ротора в турбогенераторах
при аксиальной и многоструйной радиальной системах охлаждения:
1 – лобовые части обмотки, 2 – каналы для входа водорода, 3 – клинья,
4 – каналы для выхода водорода, б – проводники обмотки
г) система охлаждения обмоток статора и ротора водой, а сердечников статора и ротора, а также внутреннего пространства машины воздухом или водородом (турбогенераторы типа ТГВ-500);
д) система охлаждения обмотки и сердечника статора маслом, обмотки ротора водой, а сердечника ротора и внутреннего пространства машины воздухом или водородом. В этом случае ротор отделен от статора изоляционным цилиндром и полость статора заполнена маслом (турбогенераторы ТГМ).
На рис. 1.9 показаны схемы подачи охлаждающего газа в проводники обмотки ротора при непосредственном водородном охлаждении. При аксиальной системе охлаждения водород попадает под бандажные кольца ротора с обеих сторон машины (рис. 1.9, а), охлаждает их и выбрасывается через радиальные отверстия в зазор между ротором и статором. При многоструйной радиальной системе охлаждения водород, поступивший в воздушный зазор через радиальные каналы статора в зоне выхода из них газа, захватывается специальными заборниками внутрь ротора (рис. 1.9, б ), проходит по каналам, имеющимся в пазах ротора, и выбрасывается обратно в воздушный зазор в зоне входа газа в каналы статора.
На рис. 1.10, а, б показано устройство для подачи и отвода охлаждающей воды к проводникам обмотки статора. Проводники обмотки статора сообщаются с коллекторами холодной и нагретой воды патрубками, выполненными из изоляционного материала. Нагретая вода проходит через охладитель и вновь поступает в коллектор холодной воды.
Роторы турбогенераторов изготовляют из цельных поковок высококачественной стали (рис. 1.11, а ). Диаметр ротора D определяется условиями механической прочности; для ограничения действующих на ротор центробежных сил он не должен превышать 1,0–1,5 м, поэтому приходится увеличивать его длину. Однако и длина ротора ограничивается допустимым прогибом вала и возникающими при этом вибрациями.
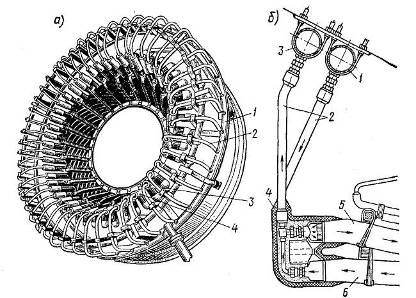
Рис. 1.10 – Устройство для подачи и отвода охлаждающей воды в проводники обмотки статора: а – общий вид; б – конструктивная схема:
1 – сборный коклектор охлаждающей воды, 2 – гибкие изолирующие шланги,
3 – сборный коллектор нагретой воды, 4 – водораспределительный наконечник,
5 – стержень, подводящий воду к обмотке, 6 – стержень, отводящий воду от обмотки
Для того чтобы прогиб вала при неподвижном роторе не превышал 2,5 мм, длина ротора l турбогенератора не должна превышать 7,5–8,5 м. Следовательно, отношение l /D достигает 5 ÷ 6. Указанные размеры ротора являются предельными по возможностям металлообрабатывающих заводов. В СССР такие поковки ротора выпускают с 1932 г. Хотя с тех пор ощутимого прогресса в увеличении размеров ротора не произошло (и в СССР, и за рубежом), мощность турбогенератора со 100 МВ-А при воздушном охлаждении возросла до 800–1200МВ·А за счет снижения механических потерь при переходе к водородному охлаждению поверхности вращающегося ротора и за счет увеличения электромагнитных нагрузок при повышенной интенсивности охлаждения в системах, описанных выше.
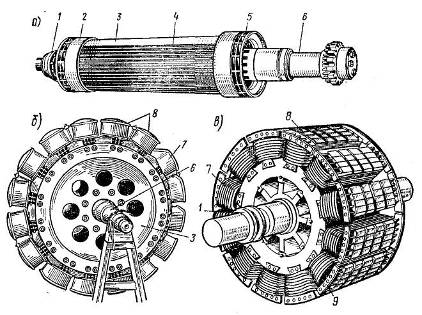
Рис. 1.11 – Общий вид роторов турбогенератора (а), гидрогенератора (б) и синхронного двигателя (в):
1 – контактные кольца, 2 – кольцевые бандажи, 3 – ротор, 4 – металлические клинья,
5 – вентилятор, 6 – вал, 7 – обмотка возбуждения, 8 – полюсы, 9 – пусковая обмотка
Гидрогенераторы . Эти машины приводятся во вращение сравнительно тихоходными гидравлическими турбинами, частота вращения которых составляет 50–500 об/мин, поэтому их выполняют с большим числом полюсов и явнополюсными роторами (рис. 1.11, б ). Диаметр ротора достигает у мощных машин 16 м при длине 1,75 м (в генераторах мощностью 590 – 640 МВ·А), т.е. для таких генераторов отношение l /D = 0,11 ÷ 0,20.
Гидрогенераторы мощностью свыше нескольких десятков мегавольт-ампер выполняют с вертикальным расположением вала (рис. 1.12). На роторе такого гидрогенератора с помощью фланца укрепляют ротор турбины, вследствие чего роторы имеют общие подшипники. В верхней части гидрогенератора на одном с ним валу обычно устанавливают вспомогательные машины: возбудитель генератора с подвозбудителем и дополнительный синхронный генератор, предназначенный для питания электродвигателей автоматического масляного регулятора турбины.
В конструкции гидрогенераторов с вертикальным расположением вала весьма ответственной частью является упорный подшипник (подпятник), который воспринимает массу роторов генератора и турбины, давление воды на лопасти турбины, а также динамические усилия.
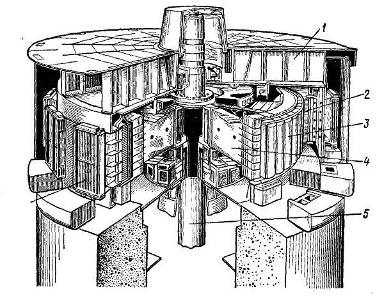
Рис. 1.12 – Общий вид гидрогенератора с вертикальным расположением вала:
1 – верхняя крестовина, 2 – статор, 3 – полюсы ротора. 4 – обод ротора, 5 – вал
В зависимости от расположения подпятника гидрогенераторы подразделяют на подвесные и зонтичные. В подвесных гидрогенераторах (рис. 1.13, а ) подпятник располагают над ротором генератора на верхней крестовине, а один или два направляющих подшипника – под ним; при этом весь турбоагрегат подвешен на подпятнике к этой крестовине. В зонтичных гидрогенераторах (рис. 1.13, б )подпятник располагают под ротором на нижней крестовине или на крышке турбины, а генератор – над подпятником в виде зонта. Крестовины представляют собой мощную опорную конструкцию, состоящую из центральной втулки и ряда радиальных балок. Быстроходные гидрогенераторы выполняют обычно подвесного типа; тихоходные – зонтичного.
Наиболее тяжелые условия работы ротора гидрогенератора имеют место при аварийном отключении машины от сети. При этом частота вращения ротора сильно возрастает, так как приложенный к нему вращающий момент от турбины остается достаточно большим (быстро прекратить поступление большой массы воды в турбину практически невозможно), а тормозной момент самого генератора из-за резкого сброса нагрузки сильно уменьшается.
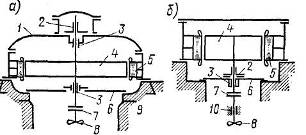
Рис. 1.13 – Конструктивные схемы гидрогенераторов:
подвесного (а) и зонтичного (б) типов:
1 – верхняя крестовина, 2 – подпятник, 3 – направляющие подшипники, 4 – ротор,
5 – статор, 6 – нижняя крестовина, 7 – фланец вала, 8 – турбина, 9 – фундамент,
10 – направляющий подшипник турбины
Достигаемую при этих условиях частоту вращения называют угонной; она не должна превышать 2,8–3,5 номинальной частоты вращения. Для уменьшения угонной частоты вращения и сокращения времени выбега ротора до его остановки в гидрогенераторах устанавливают тормоза.
Для подпятников, наоборот, наиболее тяжелые условия работы имеют место при пуске и остановке гидрогенератора, так как масляный клин (масляная пленка) в подпятнике образуется только при достаточно большой частоте вращения вала. Для облегчения работы подпятников в гидрогенераторах с вертикальным расположением вала применяют конструкции подпятников с составными самоустанавливающимися сегментами, с гидравлической опорой и автоматическим распределением нагрузки между сегментами и др.
Гидрогенераторы мощностью, меньшей нескольких десятков мегавольт-ампер, выполняют обычно с горизонтальным расположением вала. В последнее время значительное распространение получили гидрогенераторы капсульной конструкции (рис. 1.14), которые окружены водонепроницаемой оболочкой – капсулой. При таком устройстве генератор и турбина образуют единую конструкцию, а поток воды, проходящий через турбину, омывает капсулу, что способствует более интенсивному ее охлаждению. Капсульные гидрогенераторы устанавливают на низконапорных гидроэлектростанциях; это позволяет существенно уменьшить объем здания электростанции.
Гидрогенераторы из-за небольшой частоты вращения ротора не имеют таких габаритных ограничений, как турбогенераторы. Но в связи со стремлением уменьшить их габариты, массу и стоимость в машинах большой мощности* применяют непосредственное охлаждение обмоток статора, обмоток ротора и сердечника статора дистиллированной водой. При тех же основных размерах мощность гидрогенератора с водяным охлаждением можно увеличить более чем в два раза по сравнению с гидрогенератором, имеющим поверхностное воздушное охлаждение.
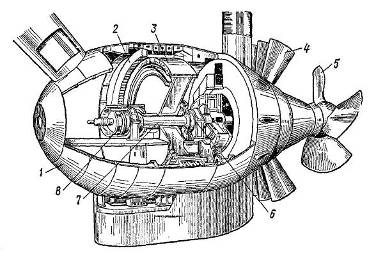
Рис. 1.14 – Общий вид гидрогенератора капсульного типа:
1 – капсула, 2 и 3 – статор и ротор генератора, 4 – направляющий аппарат турбины,
5 – ротор турбины, 6 и 8 – подшипники, 7 – вал
Непосредственное водяное охлаждение обмоток статора и ротора выполняют так же, как в турбогенераторах путем пропускания воды через полые проводники обмоток (рис. 1.15, а ). Сердечник статора охлаждается водой, циркулирующей по трубам, которые проходят сквозь отверстия в листах сердечника. Часто также применяют систему смешанного непосредственного охлаждения, при которой обмотка статора имеет водяное охлаждение, а обмотка ротора – воздушное охлаждение. На рис. 1.15, б показана система воздушного охлаждения обмотки ротора, называемая поперечной, так как охлаждающий воздух проходит по каналам 7 , расположенным поперек обмотки возбуждения. Эти каналы образуются между двумя расположенными рядом проводниками обмотки возбуждения, один из которых имеет поперечные выемки для прохода воздуха. Охлаждающий воздух подается к обмотке возбуждения по каналам 10, проходящим в сердечнике обода ротора, и по каналам 8 и 9, проходящим в сердечнике полюса. Необходимый для циркуляции воздуха напор создается центробежной силой при вращении ротора. Часть охлаждающего воздуха попадает из каналов 10 обода в междуполюсное пространство и совместно с воздухом, выходящим из каналов 7 , используется для охлаждения статора. В СССР выпускают различные типы гидрогенераторов мощностью до 640 MB·А.
Синхронные компенсаторы. Эти машины предназначены для генерирования или потребления реактивной мощности с целью улучшения коэффициента мощности сети и регулирования ее напряжения. Их обычно выполняют явнополюсными с горизонтальным расположением вала; работают они при частоте вращения 750 – 1000 об/мин. При мощности до 25MB·А синхронные компенсаторы имеют воздушное охлаждение, а при больших мощностях – водородное.
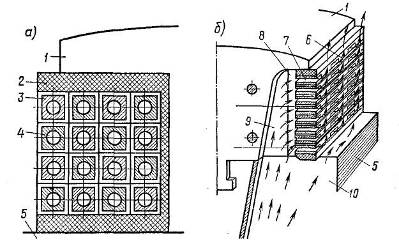
Рис. 1.15 – Устройство для охлаждения обмотки ротора
гидрогенераторов водой и воздухом:
1 – полюс, 2 – изоляция обмотки, 3 – полые проводники обмотки,
4 – канал для охлаждающей воды, 5 – обод ротора, 6 – проводники обмотки,
7 – каналы для прохода воздуха между проводниками обмотки,
8, 9, 10 – каналы для подачи воздуха к обмотке возбуждения
В СССР синхронные компенсаторы выпускают серийно мощностью от 10 до 100 MB·А. Для них характерно наличие роторов облегченной конструкции, так как вал ротора не должен передавать значительный вращающий момент (компенсатор обычно работает в режиме ненагруженного электродвигателя). Устанавливают синхронные компенсаторы в помещениях или под открытым небом. Во втором случае их выполняют с герметизированным корпусом; герметизация упрощается тем, что выводить наружу конец вала не требуется. Обмотку возбуждения у синхронных компенсаторов рассчитывают на большую (чем у генераторов и электродвигателей) м.д.с., так как они должны обеспечивать работу с перевозбуждением.
Дизель-генераторы. Эти генераторы предназначены для привода во вращение от двигателей внутреннего сгорания (дизелей). Их выполняют, как правило, явнополюсными с горизонтальным расположением вала. Дизель-генераторы имеют обычно один подшипник, в качестве второй опоры ротора используют подшипник самого дизеля, вал которого жестко соединен с валом ротора генератора. Возбудитель устанавливают непосредственно на валу ротора или же он приводится от него во вращение с помощью клиноременной передачи.
В СССР дизель-генераторы выпускают серийно мощностью от нескольких кВ·А до нескольких МВ·А при частотах вращения от 100 до1500 об/мин.
Синхронные двигатели. Их выполняют, как правило, с горизонтальным расположением вала (см. рис. 1.11, в ), хотя некоторые мощные двигатели имеют и вертикальное расположение. Эти машины изготовляют на щитовых или стояковых подшипниках, с самовентиляцией, а в некоторых случаях с независимым воздушным охлаждением.
В СССР выпускают синхронные двигатели мощностью до нескольких десятков МВт при частотах вращения от 100 до 3000 об/мин. При частотах вращения от 100 до 1000 об/мин электродвигатели выполняют явнополюсными, а при 1500 и 3000 об/мин – неявно-полюсными.
1.4 Работа синхронного генератора при холостом ходе
Э.д.с. в обмотке якоря. При холостом ходе магнитный поток генератора создается обмоткой возбуждения. Этот поток направлен по оси полюсов ротора и индуктирует в фазах обмотки якоря э.д.с. Первая гармоника Е 0 [1] этой э.д.с. определяется по той же формуле, что и первая гармоника э.д.с. для асинхронной машины:
E0 =4,44f1 ωa kоб a Фв , (1.3)
где ωa и ko 6 a – число витков в фазе и обмоточный коэффициент обмотки якоря; Фв – поток первой гармоники магнитного поля возбуждения.
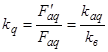
При небольших токах возбуждения магнитный поток мал и стальные участки магнитопровода машины не насыщены, вследствие чего их магнитное сопротивление мало. В этом случае магнитный поток практически определяется только магнитным сопротивлением воздушного зазора между ротором и статором, а характеристика холостого хода E 0 = f (I в ) или в другом масштабе Фв = f (I в ) имеет вид прямой линии (рис. 1.16). По мере возрастания потока растет магнитное сопротивление стальных участков магнитопровода. При индукции в стали более 1,7–1,8Т магнитное сопротивление стальных участков сильно возрастает и характеристика холостого хода становится нелинейной. Номинальный режим работы синхронных генераторов приблизительно соответствует «колену» кривой характеристики холостого хода; при, этом коэффициент насыщения k н ac , т.е. отношение отрезков ab/ ac, составляет 1,1 – 1,4.
При рассмотрении работы синхронной машины в ряде случаев для облегчения математического анализа не учитывают нелинейность кривой холостого хода, заменяя ее прямой линией. Спрямленную характеристику проводят или как касательную к кривой холостого хода (рис. 1.16, прямая 1 ), или через точку b, соответствующую рассматриваемому режиму работы, например при номинальном напряжении (прямая 2 ). В первом случае спрямленная характеристика соответствует работе машины при отсутствии насыщения. Во втором случае она учитывает некоторое среднее насыщенное состояние магнитной цепи машины.
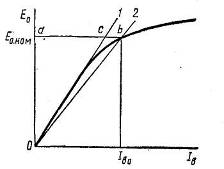
Рис. 1.16 – Характеристика холостого хода синхронного генератора
В теории синхронной машины широко используют систему относительных единиц. Основные параметры машины (ток, напряжение, мощность, сопротивления) выражают в долях соответствующей базисной величины[2] . В качестве базисных единиц при построении характеристики холостого хода принимают номинальное напряжение U ном машины и ток холостого хода I в0 , при котором Е 0 = U ном . Относительные значения э.д.с. и тока возбуждения при этом запишутся следующим образом:
E0* =E0 /Uном ; I0* =Iв /Iв0
Характеристики холостого хода, построенные в относительных единицах для различных синхронных генераторов, при одинаковых коэффициентах насыщения совпадают. Поэтому характеристика холостого хода в относительных единицах может быть принята единой для всех генераторов; для каждого конкретного генератора различие будет только в базисных единицах и коэффициентах насыщения.
Форма кривой напряжения. Напряжение, индуктированное в обмотке якоря при холостом ходе, по возможности должно быть синусоидальным. Согласно ГОСТ 183–74 напряжение считается практически синусоидальным, если разность между ординатой действительной кривой напряжения и ординатой синусоиды в одной и той же точке для генераторов мощностью до 1 MB·А не превышает 10%, а для генераторов свыше 1 MB·А-5% от амплитуды основной синусоиды. Чтобы получить кривую напряжения, близкую к синусоидальной, желательно иметь в машине распределение магнитного поля, близкое к синусоидальному. Для этого в неявнополюсных машинах обмотку возбуждения распределяют так, чтобы были уменьшены амплитуды м.д.с. высших гармоник. В явнополюсных машинах этого добиваются увеличением зазора под краями полюсных наконечников. Обмотку якоря также выполняют распределенной (q = 4 ÷ 6) с укороченным шагом (y ≈ 0,8τ). Чтобы исключить третьи гармоники тока и уменьшить потери мощности в машине, обмотку якоря в трехфазных генераторах соединяют звездой. При этом будут отсутствовать также и третьи гармоники в линейном напряжении. Подавление третьих гармоник в кривой фазного напряжения путем укорочения шага обмотки нерационально, так как при у ≈ 0,66τ существенно уменьшается первая гармоника. Указанные меры позволяют получить на выходе, машины практически синусоидальную э.д.с, поэтому при дальнейшем рассмотрении теории синхронной машины можно принимать во внимание только поток первой гармоники магнитного поля и соответствующую гармонику э.д.с. Поток первой гармоники магнитного поля возбуждения Фв называют потоком взаимоиндукции.
Магнитное поле возбуждения . Магнитное поле, созданное обмоткой возбуждения, характеризуется рядом коэффициентов, посредством которых реальное распределение индукции в воздушном зазоре приводится к синусоидальному. К числу этих коэффициентов относятся: коэффициент формы кривой поля возбуждения k в = В вm1 /В вm –отношение амплитуды первой гармоники В вm1 индукции поля возбуждения в воздушном зазоре к амплитуде В вm действительного распределения этой индукции; коэффициент потока возбуждения k ф = Ф/Фв – отношение потока Ф, созданного обмоткой возбуждения в воздушном зазоре, к потоку первой гармоники Фв этого поля (потоку взаимной индукции).
Определим эти коэффициенты для неявнополюсной и явнопо-люсной машин. На рис. 1.17, а , б показано распределение магнитного поля возбуждения в воздушном зазоре в пределах одного полюсного деления для неявнополюсной машины. На одно полюсное деление ротора приходится значительное число пазов (20–40), поэтому можно принять, что распределение индукции в воздушном зазоре вдоль окружности якоря (сплошная линия) имеет трапецеидальный характер. Если рассматривать обмотку возбуждения как однофазную, распределенную на части γτ окружности ротора, то при указанном распределении индукции поля возбуждения получим для поля первой гармоники (штриховая линия)
Bв m1 =4Bв m kр.в /π, (1.4)
где ![]() – коэффициент распределения для обмотки возбуждения; γ =
Z
в2
/Z
2
– коэффициент заполнения окружности ротора обмоткой возбуждения, равный отношению числа пазов ротора Z
в2
, заполненных проводниками обмотки, к полному числу Z
2
пазовых делений ротора.
– коэффициент распределения для обмотки возбуждения; γ =
Z
в2
/Z
2
– коэффициент заполнения окружности ротора обмоткой возбуждения, равный отношению числа пазов ротора Z
в2
, заполненных проводниками обмотки, к полному числу Z
2
пазовых делений ротора.
Следовательно, коэффициент формы кривой поля возбуждения
![]() . (1.5)
. (1.5)
Магнитный поток возбуждения
Ф=αδ τli Bв m (1.6)
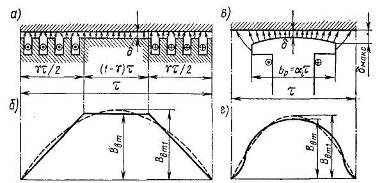
Рис. 1.17 – Магнитное поле обмотки возбуждения в воздушном зазоре
Неявнополюснойи явнополюсной машин
При трапецеидальном распределении индукции поток Ф можно считать состоящим из двух частей: потока Ф', соответствующего части (1 – γ )τ окружности ротора, незаполненной обмоткой, и потока Ф», соответствующего части γτ окружности ротора, в пазах которой уложена обмотка возбуждения:
Ф=Ф' +Ф'' =Bв m (1-γ)τli + 0,5Bв m γτli = Bв m τli (1-γ/2). (1.7)
Поток первой гармоники поля возбуждения
Фв =2Bв m 1 τli /π (1.8)
Следовательно, коэффициент потока возбуждения
![]() (1.9)
(1.9)
С учетом (1.7) расчетный коэффициент полюсного перекрытия
αi =Ф/(τli Bв m )=1-γ/2. (1.10)
На рис. 1.17, в , г показано распределение магнитного поля возбуждения в воздушном зазоре в пределах одного полюсного деления для явнополюсной машины.
При проектировании явнополюсных синхронных машин принимаются меры, чтобы кривая распределения поля возбуждения в воздушном зазоре (сплошная линия) приближалась к синусоиде (для этого воздушный зазор выполняют неравномерным), однако получить идеальное распределение не удается. Поэтому наряду с первой га-рмоникой (штриховая линия) имеется и ряд высших гармоник. Форма распределения магнитного поля и коэффициент k в зависят от коэффициента полюсной дуги αi = b р /τ и формы воздушного зазора, т.е. от отношений δмакс /δ и δ/τ. Обычно αi = 0, б5 ÷ 0,75; δмакс /δ = l ÷ 2,5 и δ/τ = 0,01 ÷ 0,05. При этих условиях k в = 0,90 ÷ l, 20.
Коэффициент магнитного потока k ф также зависит от формы распределения магнитного поля и представляет собой отношение площадей, ограниченных рассматриваемыми кривыми. При указанных выше значениях b р /τ, δмакс /δ и δ/τ коэффициент k ф = 0,92 ÷ 1,10.
С учетом (1.6) и (1.8) расчетный коэффициент полюсного перекрытия
αi =2kв kФ /π. (1.11)
1. 5 Работа синхронного генераторапод нагрузкой. Реакция якоря
Рассмотрим работу трехфазного синхронного генератора в автономном режиме, когда к фазам обмотки якоря подключены равные и однородные сопротивления. В этом случае при симметричной нагрузке по фазным обмоткам генератора проходят равные токи, сдвинутые по времени относительно друг друга на 120°. Эти токи создают магнитное поле якоря, вращающееся с частотой n 1 , равной частоте вращения ротора n 2 . Следовательно, магнитные потоки якоря Фа и возбуждения Фв будут взаимно неподвижны и результирующий поток машины Фрез при нагрузке будет создаваться суммарным действием м.д.с. F в обмотки возбуждения и м.д.с. F а якоря. Однако в синхронной машине (в отличие от асинхронной) м.д.с. обмотки ротора (возбуждения) не зависит от нагрузки, поэтому результирующий поток при работе генератора в рассматриваемом режиме будет существенно отличаться от потока при холостом ходе.
Воздействие м.д.с. якоря на магнитное поле синхронной машины называют реакцией якоря. Так как под действием реакции якоря изменяется результирующий поток в машине, напряжение генератора, работающего в автономном режиме, будет зависеть от величины и характера нагрузки, а также от индивидуальных особенностей машины: величины м.д.с. обмотки возбуждения, свойств магнитной системы и т.д. Рассмотрим, как проявляется реакция якоря при двух основных конструктивных формах синхронных машин – неявнополюсных и явнополюсных.
Неявнополюсная машина. В этой машине величина воздушного зазора между статором и ротором по всей окружности остается неизменной, поэтому результирующий магнитный поток машины Фрез и создаваемая им э.д.с. Е при любой нагрузке могут быть определены по характеристике холостого хода исходя из результирующей м.д.с. F рез . Однако при отсутствии насыщения в магнитной цепи машины этот метод определения потока Фрез может быть существенно упрощен, так как от сложения указанных м.д.с. можно перейти к непосредственному векторному сложению соответствующих потоков:
Фрез =Фв +Фа ,
как это показано на рис. 1.18 и 1.19.
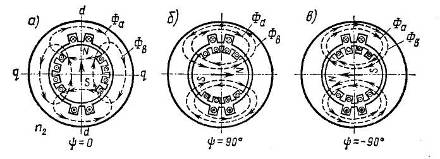
Рис. 1.18 – Реакция якоря в неявнополюсной машине при различных условиях нагрузки
При ψ= 0 (рис. 1.18, а и 1.19, а ) ток в фазе А – X достигает максимума в момент времени, когда оси полюсов N иS совпадают с осью среднего паза рассматриваемой обмотки. Для этого случая показаны диаграммы распределения основных гармоник магнитных полей.
Кривая распределения индукции B
a
=
f(
x)
для двухполюсной машины будет смещена относительно кривой индукции B
в
=
f(
x)
в пространстве на 90°, т.е. поток якоря Фа
действует в направлении, перпендикулярном действию потока возбуждения Фв
(поперек оси полюсов). В теории синхронной машины ось, проходящую через середину полюсов, называют продольной
и обозначают буквами d
–d;
ось, проходящую между полюсами, называют поперечной
и обозначают q
– q.
Следовательно, при ψ = 0 поток якоря действует по поперечной оси машины, размагничивая одну половину каждого полюса и подмагничивая другую. Кривая распределения результирующей индукции B
рез
=
f(
x)
при этом сдвигается относительно кривой B
в
=
f(
x)
против направления вращения ротора. В соответствии с пространственным сдвигом кривых распределения индукции сдвигаются и векторы потоков на временной векторной диаграмме, т.е. вектор ![]() отстает от вектора потока возбуждения
отстает от вектора потока возбуждения ![]() на 90°. Вектор результирующего потока
на 90°. Вектор результирующего потока ![]() ; его модуль
; его модуль
![]()
При ψ = 90° (рис. 1.18, б
и 1.19, б
) ток в фазе А
–X
достигает максимума на 1/4 периода позднее момента, соответствующего максимуму э.д.с. Е
0
.
За это время полюсы ротора перемещаются на 1/2 полюсного деления, вследствие чего кривая B
a
=
f(
x)
смещается относительно кривой B
в
=
f(
x)
на 180°. При этом поток якоря ![]() действует по продольной оси машины против потока возбуждения
действует по продольной оси машины против потока возбуждения ![]() ; результирующий поток
; результирующий поток ![]() сильно уменьшается, вследствие чего уменьшается и э.д.с. якоря Ė.
Таким образом, при ψ = 90° реакция якоря действует на машину размагничивающим образом.
сильно уменьшается, вследствие чего уменьшается и э.д.с. якоря Ė.
Таким образом, при ψ = 90° реакция якоря действует на машину размагничивающим образом.
При ψ = – 90° (рис. 1.18, в
и 1.19, в
) поток якоря также действует по продольной оси машины, но совпадает по направлению с потоком возбуждения. Следовательно, реакция якоря действует на машину подмагничивающим образом, увеличивая ее результирующий поток ![]() и э.д.с. Ė
.
и э.д.с. Ė
.
Выводы, полученные при рассмотрении трех случаев нагрузки, можно распространить и на общий случай, когда –90° < ψ < 90°. При этом характерным является то, что отстающий ток (активно-индуктивная нагрузка) размагничивает машину, а опережающий ток (активно-емкостная нагрузка) подмагничивает ее.
Э.д.с. Е при работе генератора под нагрузкой можно рассматривать как сумму двух составляющих:
![]() . (1.12)
. (1.12)
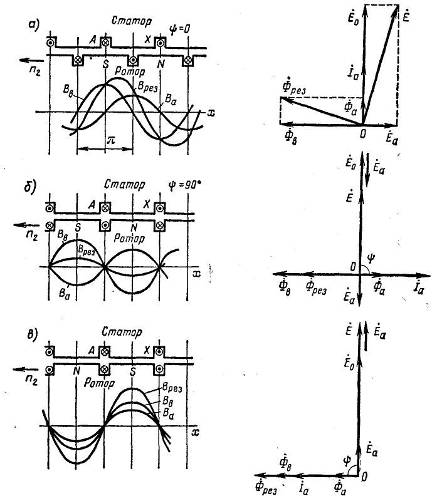
Рис. 1.19 – Кривые распределения индукции в неявнополюсной машинеи векторные диаграммы потоков и э. д. с. при различных углах ψ
Э.д.с. Е а пропорциональна потоку Ф а , т.е. току 1 а в обмотке якоря, поэтому ее можно рассматривать как э.д.с. самоиндукции, индуктированную в обмотке якоря, и представить в виде
![]() ,
,
где х а – индуктивное сопротивление синхронной машины, обусловленное потоком реакции якоря.
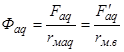
Явнополюсная машина . В этой машине воздушный зазор между статором и ротором не остается постоянным, так как он расширяется по направлению к краям полюсов и резко увеличивается в зоне междуполюсного пространства. По этой причине поток якоря здесь зависит не только от величины м.д.с. F a якоря, но и от положения кривой распределения этой м.д.с. F a = f ( x) относительно полюсов ротора, так как одна и та же м.д.с. якоря в зависимости от ее пространственного положения создает различный магнитный поток. Так, например, при угле ψ = 0 (рис. 1.20, а ), когда поток якоря направлен по поперечной оси машины, кривая распределения индукции B a = B aq имеет седлообразную форму, хотя м.д.с. F а якоря распределена синусоидально. При этом максимуму м.д.с. F a соответствует небольшая индукция, так как магнитное сопротивление воздушного зазора максимально. При угле ψ = 90° (рис. 1.20, б ), когда поток якоря направлен по продольной оси машины, кривая распределения индукции В а = B ad расположена симметрично относительно оси полюсов. В этом случае индукция имеет большее значение, чем при ψ = 0, так как магнитное сопротивление воздушного зазора в данном месте невелико. Соответственно различные максимальные значения будут иметь и первые гармоники B ad1 и В аq1 указанных кривых.
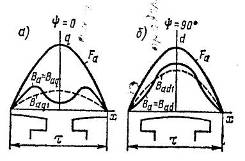
Рис. 1.20 – Кривые распределения м. д. с. реакции якоряи создаваемых ею индукций в явнополюсной машине
Чтобы избежать трудностей, связанных с изменением результирующего сопротивления воздушного зазора при различных режимах работы машины, при анализе работы явнополюсной синхронной машины следует использовать так называемый метод двух реакций. Согласно этому методу, м.д.с. F a в общем случае представляют в виде суммы двух составляющих: продольной F ad = F a sin ψи поперечной F aq = F a cos ψ(рис. 1.21, а ), причем F a = F ad + F aq . Продольная составляющая F ad создает продольный поток якоря Фаd , индуктирующий в обмотке якоря э.д.с. E ad ,а поперечная составляющая F aq – поперечный поток Фаq , индуктирующий э.д.с. E aq ,причем принимают, что эти потоки не оказывают влияния друг на друга. В соответствии с принятым методом ток якоря I а , создающий м.д.с. F а , также представляют в виде двух составляющих: продольной I d и поперечной I q (рис. 1.21, б ).
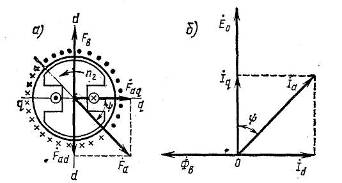
Рис. 1.21 – Разложение векторов м.д.с. и тока якоря на продольную ипоперечную составляющие
Величину магнитных потоков Ф аd и Фаq и индуктируемых ими э.д.с. E ad и E aq можно определить по кривой намагничивания машины или по спрямленной характеристике (рис. 1.22). Однако кривая намагничивания строится для м.д.с. возбуждения F в , имеющей не синусоидальное, а прямоугольное распределение вдоль, окружности якоря. Чтобы воспользоваться указанной кривой или спрямленной характеристикой, м.д.с. F ad и F aq следует привести к прямоугольной м.д.с. возбуждения F в , т.е. найти их эквивалентные значения F ad ' и F aq '.
Установление эквивалентных значений F ad ' и F aq ' производят на основании следующих соображений: м.д.с. F ad и F aq создают в воздушном зазоре машины индукции B ad и В аq ,распределенные вдоль окружности якоря так же, как и индукции, создаваемые м.д.с. F а соответственно при углах ψ = 0 и ψ = 90о (см. рис. 1.20, а, б). Первые гармоники B ad 1 и B aq 1 кривых B ad = f ( x ) и B aq = f ( x ) образуют магнитные потоки
Фad =Fad /rм ad ; Фaq = Faq /rм aq .
где r м ad и r м aq – магнитные сопротивления для соответствующих потоков, учитывающие не только форму воздушного зазора, но и синусоидальность кривой распределения м.д.с. F ad и F aq вдоль окружности якоря.
М.д.с. возбуждения создавала бы такие же потоки Фаd и Фаq при меньших величинах м.д.с. F' ad и F' aq :
![]() ;
;  .
.
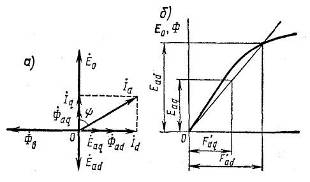
Рис. 1.22 – Векторная диаграмма потоков Фad и Фаq и э. д. с. Ead и Eaq (а) явнополюсной машины и их определение по характеристике холостого хода (б)
Из последних выражений можно найти коэффициенты реакции якоря kd и kq , характеризующие уменьшение эффективных значений м.д.с. якоря:
![]() ;
;  . (1.13)
. (1.13)
где r м.в –магнитное сопротивление для потока возбуждения, учитывающее форму воздушного зазора по продольной оси машины и прямоугольное распределение м.д.с. F в вдоль окружности якоря. Чтобы определить коэффициенты kd и kq , необходимо знать, как распределяются вдоль окружности якоря индукции Bad и Baq , созданные продольной Fad и поперечной Faq составляющими м.д.с. якоря, и их первые гармоники Bad 1 и Baq 1 . Для характеристики этого распределения используют коэффициенты формы поля реакции якоря по продольной kad и поперечной kaq осям, аналогичные по своей структуре коэффициенту формы поля обмотки возбуждения k в :
![]() ;
;  (1.14а)
(1.14а)
где Badm 1 и Baqm 1 –амплитуды первых гармоник реального распределения магнитной индукции; Badm и Baqm – максимальные значения индукций Bad и Baq вычисленные в предположении, что воздушный зазор между статором и ротором равномерный, равный его значению под серединой полюса.
Коэффициенты kad и kaq зависят от тех же параметров αi , δ/τ и δмакс /δ, что и коэффициент k в , причем (см. рис. 1.20) kaq < kad .
Из условий равенства первых гармоник индукций, созданных м.д.с. якоря Fаd и эквивалентной ей м.д.с. возбуждения F' ad и соответственно Faq и F' aq , имеем kad Fad = k в F' ad ;kaq Faq = k в F' aq , откуда
![]() ;
;  . (1.14б)
. (1.14б)
Коэффициенты kd и kq физически характеризуют уменьшение магнитного сопротивления для потока Фв по сравнению с потоками Фаd и Фаq Обычно kd = 0,8 ÷ 0,95; kq = 0,3 ÷ 0,65.
В машине с явно выраженными полюсами э.д.с. Е при работе генератора под нагрузкой можно представить как сумму трех составляющих:
![]() . (1.15)
. (1.15)
Э.д.с. Ead и Eaq , индуктируемые продольным Фаd и поперечным Фaq потоками якоря, представляют собой по существу э.д.с. самоиндукции, так как сами потоки Фаd и Фаq создаются м.д.с. Fad и Faq , пропорциональные токам Id и Iq . Поэтому для ненасыщенной машины можно считать, что
![]() ;
; ![]() , (1.16)
, (1.16)
где хаd и хаq –индуктивные сопротивления обмотки якоря, соответствующие полям продольной и поперечной реакций якоря, причем
xad /xaq =kad /kaq . (1.17)
Для машины с неявно выраженными полюсами м.д.с. якоря приводится к м.д.с. обмотки возбуждения по формуле
F'a =kd Fa .
1.6 Векторные диаграммы синхронного генератора
При анализе работы синхронных машин обычно используют векторные диаграммы: при качественном–упрощенные диаграммы, справедливые для машин, в которых отсутствует насыщение, а при количественном–уточненные диаграммы.
Неявнополюсная машина . Для цепи якоря неявнополюсной синхронной машины можно написать уравнение
![]() (1.18а)
(1.18а)
или
![]() , (1.18б)
, (1.18б)
где Esa – э.д.с, индуктированная в обмотке якоря потоком рассеяния; xsa –индуктивное сопротивление, обусловленное этим потоком.
На рис. 1.23, а изображена векторная диаграмма, построенная по (1.18б ), называемая диаграммой Потье. Эта диаграмма позволяет определить э. д. с. холостого хода Е 0 с учетом насыщения машины, если заданы напряжение, ток нагрузки (по величине и фазе), характеристика холостого хода и параметры машины. Сначала по известным падениям напряжения строится вектор э. д. с.
![]() . (1.18)
. (1.18)
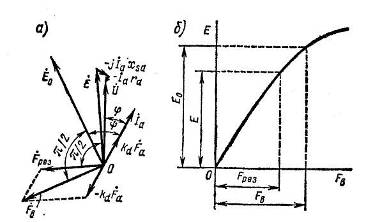
Рис. 1.23 – Векторная диаграмма синхронной неявнополюсной машины (а) и определение э. д. с. по характеристике холостого хода (б)
Так как э.д. с. Е индуктируется результирующим потоком Фрез , который создается результирующей м.д. с.
![]()
по характеристике холостого хода (рис. 1.23, б)
можно определить F
рез
,
соответствующую э.д. с. Е.
Вектор ![]() совпадает по фазе с вектором
совпадает по фазе с вектором ![]() , а оба эти вектора опережают по фазе вектор Ė
на 90°.
, а оба эти вектора опережают по фазе вектор Ė
на 90°.
Зная ![]() и параметры машины, можно найти м.д.с. возбуждения
и параметры машины, можно найти м.д.с. возбуждения
![]() ,
,
а затем по характеристике холостого хода определить величину э.д. с. холостого хода Е
0
.
Вектор Ė
0
отстает от вектора ![]() на 90°.
на 90°.
Если требуется перейти от режима холостого хода к режиму нагрузки, то построения производят в обратном порядке.
Если машина не насыщена, то векторная диаграмма существенно упрощается, так как в этом случае складывают не м.д. с. ![]() и
и ![]() ,
а соответствующие им потоки и э. д. с. Упрощенную векторную диаграмму синхронной неявнополюсной машины (рис. 1.24, а
) строят по уравнению (1.18 б),
которое с учетом (1.12) принимает вид
,
а соответствующие им потоки и э. д. с. Упрощенную векторную диаграмму синхронной неявнополюсной машины (рис. 1.24, а
) строят по уравнению (1.18 б),
которое с учетом (1.12) принимает вид
![]() . (1.19а)
. (1.19а)
Поскольку падение напряжения в активном сопротивлении обмотки статора Iа rа сравнительно невелико, им можно пренебречь. Заменяя, кроме того, в уравнении (8–19а) Ėа = – jİа ха , получим
![]() . (1.19б)
. (1.19б)
Величину xa + xsa = x сн называют полным или синхронным индуктивным сопротивлением машины. Следовательно, уравнение (1.19б) может быть представлено в виде
![]() . (1.19в)
. (1.19в)
Упрощенная векторная диаграмма, соответствующая уравнению (1.19в), изображена на рис. 1.24, б; ее широко используют при качественном анализе работы синхронной машины. Необходимо, однако, отметить, что определение Ė 0 по упрощенной диаграмме дает несколько большую величину, чем по точной диаграмме (см. рис. 1.23, а), в которой учитывается насыщение.
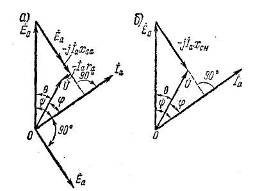
Рис. 1.24 – Упрощенная векторная диаграмма синхронной неявнополюсной машины с учетом (а) и без учета (б) активного падения напряжения в якоре
Угол θ между векторами Ù и Ė 0 называют углом нагрузки. При работе синхронной машины в генераторном режиме напряжение Ù всегда отстает от э.д.с. Ė 0 , в этом случае угол θ считается положительным. Чем больше нагрузка генератора (отдаваемая им мощность), тем больше угол θ.
Явнополюсная машина. Упрощенную диаграмму синхронной явнополюсной машины также можно построить по общему уравнению (1.18а), которое с учетом (1.15) принимает вид
![]() . (1.20а)
. (1.20а)
На рис. 1.25, а приведена векторная диаграмма, соответствующая уравнению (1.20а). Если пренебречь малой величиной rа , то
![]() . (1.20б)
. (1.20б)
Э. д. с. Ė sa , индуктируемую в обмотке якоря потоком рассеяния, можно представить в виде суммы двух составляющих – Ė sad и Ė saq , ориентированных по осям d –d и q –q:
![]() , (1.21)
, (1.21)
где
![]() ;
; ![]() , (1.22)
, (1.22)
так как
![]() ;
;
![]()
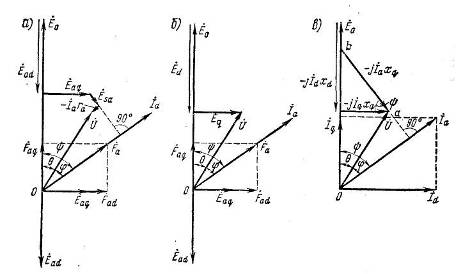
Рис. 1.25 – Упрощенные векторные диаграммы синхронной явнополюсной машины:
а–с учетом активного падения напряжения в якоре: б – без учета этого падения напряжения; в–с заменой э. д. с. на реактивные падения напряжения
С учетом (1.22) вместо (1.20б) получим
![]() , (1.23а)
, (1.23а)
где Ėd = Ėad + Ėsad и Ėq = Ėaq + Ėsaq .
Векторная диаграмма, построенная по (1.23а), приведена на рис. 1.25, б.
Заменяя э. д. с. соответствующими реактивными падениями напряжения, будем иметь
![]() , (1.23б)
, (1.23б)
где xd = xad +xsa ; xq = xaq + xsa .
Сопротивления xd и xq называют полными или синхронными индуктивными сопротивлениями обмотки якоря по продольной и поперечной осям.
На рис. 8–25, в
приведена векторная диаграмма, построенная по (8–23б). Если заданы векторы тока İа
и напряжения Ù,
а угол ψ неизвестен, то его можно определить, проведя из конца вектора напряжения Ù
отрезок ![]() ,
равный Iа
хq
и перпендикулярный вектору тока. Конец построенного отрезка будет расположен на векторе э.д. с. Ė
0
или его продолжении, так как проекция отрезка
,
равный Iа
хq
и перпендикулярный вектору тока. Конец построенного отрезка будет расположен на векторе э.д. с. Ė
0
или его продолжении, так как проекция отрезка ![]() на вектор Ė
q
равна модулю этого вектора:
на вектор Ė
q
равна модулю этого вектора:
![]() .
.
1 .7 Внешние и регулировочные характеристикисинхронного генератора
Построение внешних характеристик. Внешние характеристики синхронного генератора представляют собой зависимости напряжения U от тока нагрузки Iа при неизменных токе возбуждения I в , угле φ и частоте f 1 (постоянной частоте вращения ротора n 2 ).
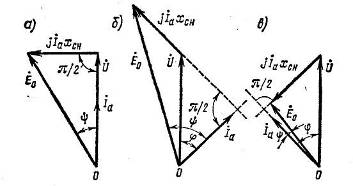
Рис. 1.26–Упрощенные векторные диаграммы синхроннойнеявнополюсной машины
Они могут быть построены при помощи векторных диаграмм. Допустим, что при номинальной нагрузке Iа ном генератор имеет номинальное напряжение U ном , что достигается соответствующим выбором тока возбуждения. При уменьшении тока нагрузки до нуля напряжение генератора станет равным э.д. с. холостого хода Е 0 . Таким образом, векторная диаграмма, построенная при номинальной нагрузке, сразу дает две точки внешней характеристики. Форма внешней характеристики зависит от характера нагрузки, т.е. от угла сдвига фаз φ между Ù и İ а , так как в зависимости от этого угла изменяется величина вектора Ė 0 (при заданном значении U = U ном ).
На рис. 1.26 показаны упрощенные векторные диаграммы генератора с неявно выраженными полюсами для активной (а ), активно-индуктивной (б )и активно-емкостной (в ) нагрузок. При активной и активно-индуктивной нагрузках Е 0 > U; при активно-емкостной нагрузке Е 0 < U . Таким образом, в первых двух случаях при увеличении нагрузки напряжение генератора уменьшается, в третьем – увеличивается. Это объясняется тем, что при активно-емкостной нагрузке имеется продольная намагничивающая составляющая реакции якоря, а в двух других случаях–продольная размагничивающая (при чисто активной нагрузке угол ψ > 0).
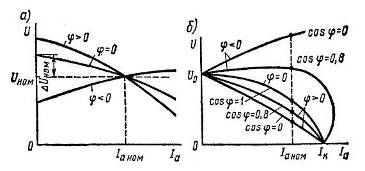
Рис. 1.27–Внешние характеристики синхронного генераторапри различном характере нагрузки
На рис. 1.27 изображены внешние характеристики генератора при различных видах нагрузки, полученные при одинаковом для всех характеристик значении U ном (а) и при одинаковом значении Uo = Eo (б). Во втором случае при U = 0 (короткое замыкание) все характеристики пересекаются в одной точке, соответствующей значению тока короткого замыкания I к .
Изменение напряжения. При переходе от режима холостого хода к режиму номинальной нагрузки изменение напряжения характеризуется величиной
![]() (1.24)
(1.24)
Обычно генераторы работают с cosφ = 0,9 ÷ 0,85 при отстающем токе. В этом случае Δu % = 25 ÷ 35%. Чтобы подключенные к генератору потребители работали при напряжении, близком к номинальному, требуется применять специальные устройства, стабилизирующие его выходное напряжение U, например быстродействующие регуляторы тока возбуждения. Чем больше Δи % , тем более сложным получается регулирующее устройство, а поэтому желательно иметь генераторы с небольшой величиной Δи % . Однако небольшую величину Δи % можно получить, уменьшая синхронное индуктивное сопротивление х сн (в неявнополюсных машинах) или соответственно хd и xq (в явнополюсных машинах), т.е. поток якоря, для чего требуется увеличивать воздушный зазор между ротором и статором. При таком способе уменьшения Δи % необходимо увеличивать м.д. с. обмотки возбуждения, что заставляет увеличивать размеры этой обмотки и делать в конечном итоге синхронную машину более дорогой.
В мощных турбогенераторах мощность ограничивается именно размерами ротора, на котором размещена обмотка возбуждения. Поэтому в современных турбогенераторах с повышением мощности машины одновременно возрастает и изменение напряжения Δи % .
В гидрогенераторах (по сравнению с турбогенераторами) воздушный зазор обычно имеет гораздо большую величину, поэтому у них относительно слабее проявляется реакция якоря, т.е. они имеют меньшие синхронные индуктивные сопротивления, выраженные в относительных единицах, что обусловливает и меньшее изменение напряжения Δи % .
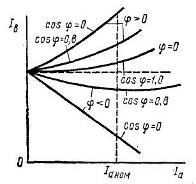
Рис. 1.28 – Регулировочные характеристики синхронного генераторапри различном характере нагрузки
Регулировочные характеристики синхронного генератора. Эти характеристики (рис. 1.28) представляют собой зависимости тока возбуждения I в от тока нагрузки Iа при неизменных напряжении U, угле φ и частоте f 1 . Они показывают, как надо изменять ток возбуждения генератора, чтобы поддерживать его напряжение неизменным при изменении тока нагрузки. Очевидно, что при возрастании нагрузки необходимо при φ > 0 увеличивать ток возбуждения, а при φ < 0-уменьшать его. Чем больше угол φ по абсолютной величине, тем в большей степени требуется изменять ток возбуждения.
1 .8 Определение индуктивных сопротивленийсинхронной машины
Опыты холостого хода и короткого замыкания. Синхронные индуктивные сопротивления машины могут быть найдены по результатам опытов холостого хода и короткого замыкания.
При опыте холостого хода определяют характеристику холостого хода E 0 = f (I в ) при номинальной частоте вращения машины, изменяя ток возбуждения I в .
При опыте короткого замыкания фазы обмотки якоря замыкают накоротко через амперметры, после этого ротор приводят во вращение с номинальной частотой и снимают характеристику короткого замыкания, т.е. зависимость тока якоря от тока возбуждения I а = f (I в ). Эта характеристика (рис. 1.29, а) имеет линейный характер, так как при rа ≈ 0 сопротивление цепи якоря является чисто индуктивным и ток короткого замыкания I к = Id (рис. 1.29, б )создает поток реакции якоря, размагничивающий машину. В результате магнитная цепь машины оказывается ненасыщенной, т.е. э. д. с. Е 0 и ток I к будут изменяться пропорционально току возбуждения I в .
При работе машины в рассматриваемом режиме напряжение U = 0, поэтому уравнения (1.23б) и (1.19в) принимают вид:
для явнополюсной машины
![]() ; (1.25а)
; (1.25а)
для неявнополюсной машины
![]() . (1.25б)
. (1.25б)
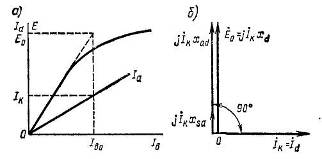
Рис. 1.29–Характеристики холостого хода и короткого замыкания (а)и векторная диаграмма явнополюсной машины при коротком замыкании (б)
Определение индуктивных сопротивлений xd и xq. Из формулы (1.25а) можно определить синхронное индуктивное сопротивление машины по продольной оси
![]() , (1.26a)
, (1.26a)
где э. д. с. Е 0 и ток I к должны быть взяты при одном и том же значении тока возбуждения (рис. 1.29, а). Для прямолинейного участка характеристики холостого хода безразлично, при каком токе возбуждения определяется xd , так как во всех случаях xd = const. Такое же значение сопротивления xd будет при любом значении тока возбуждения, если величину Е 0 находить по спрямленной характеристике холостого хода. Полученное таким путем значение xd будет соответствовать ненасыщенной машине. Для насыщенной машины значение xd уменьшается и его можно было бы определить по формуле (1.26а), подставляя в нее действительное значение э.д. с, полученное по характеристике холостого хода. Однако значение xd нас с учетом насыщения будет справедливо только для одной точки характеристики, соответствующей определенной величине потока по продольной оси. Изменение тока возбуждения ведет к изменению хd нас , при этом приходится оперировать с переменной величиной, что крайне неудобно. Поэтому практически употребляется только ненасыщенное значение xd , а учет насыщения, если это требуется, производится непосредственным определением соответствующих э. д. с. по характеристике холостого хода (как это было показано при построении диаграммы Потье).
Если известны коэффициенты приведения kd и kq , то по полученному значению xd можно определить синхронное индуктивное сопротивление по поперечной оси:
![]() . (1.26б)
. (1.26б)
В неявнополюсных машинах xd = xq = x сн , т.е. х сн = Е 0 /I к . Если выразить синхронные индуктивные сопротивления в относительных единицах, то
![]() ;
; ![]() . (1.27)
. (1.27)
где Iа ном и U ном – фазные значения номинальных величин тока и напряжения.
Сопротивления в относительных единицах наглядно выражают параметры машины, показывая относительную (по отношению к номинальному напряжению) величину падения напряжения при номинальном токе. Относительные величины позволяют, кроме того, сравнивать между собой свойства генераторов различной мощности.
Отношение короткого замыкания . Иногда в паспорте машины указывается величина, обратная x d* , называемая отношением короткого замыкания :
![]() . (1.28)
. (1.28)
Это отношение характеризует величину установившегося тока короткого замыкания I к ном , который имеет место при токе возбуждения генератора, соответствующем номинальному напряжению
![]() .
.
В современных синхронных явнополюсных машинах средней и большой мощности x d* = 0,6 ÷ 1,6, axq * = 0,4 ÷ 1. Сопротивление x d* определяется в основном реакцией якоря, так как относительная величина индуктивного сопротивления, обусловленного потоком рассеяния, мала (xsa * = 0, l ÷ 0,2). В неявнополюсных машинах средней и большой мощности обычно сопротивление х сн* = 0,9 ÷ 2,4. При указанных значениях x d* и хq* , для гидрогенераторов k о.к.з = 0,8 ÷ 1,8, а для турбогенераторов k о.к.з = 0,5 ÷ 1,0. Следовательно, установившийся ток короткого замыкания в синхронных машинах сравнительно невелик (в некоторых машинах он меньше номинального), так как при этом режиме угол ψк ≈ 0 и поле якоря сильно размагничивает машину. Очевидно, что результирующий магнитный поток Фрез.к << Фв и э.д.с. Е к << Е 0 .
Коэффициент k о.к.з имеет большое значение для эксплуатации не только потому, что показывает кратность тока короткого замыкания, но также и потому, что определяет предельную величину мощности, которой можно нагрузить синхронный генератор. В этом отношении выгоднее иметь машины с большим k о.к.з , однако это требует выполнения ее с большим воздушным зазором, что существенно удорожает машину.
Определение индуктивного сопротивления хsa .Для определения xsa снимают индукционную нагрузочную характеристику генератора, т.е. зависимость его напряжения U от тока возбуждения I в при неизменных токе нагрузки Iа = I ном , частоте f 1 и cosφ = 0 (чисто индуктивная нагрузка). Нагрузочная характеристика 2 (рис. 1.30, а ) проходит ниже характеристики холостого хода 1, которую можно рассматривать как частный случай нагрузочной характеристики при Iа = 0.
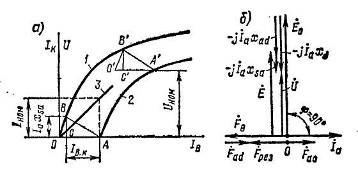
Рис. 1.30–Индукционная нагрузочная характеристика синхронного генератора (а)и его векторная диаграмма при индуктивной нагрузке (б)
Так как при снятии индукционной нагрузочной характеристики в машине имеется только продольная составляющая м. д. с. Fаd
реакции якоря, то, как следует из векторной диаграммы (рис. 1–30, б
), результирующая м. д. с. ![]() и напряжение машины Ù = Ė
0
–jİ
a
xad
–jJa
xsa
= Ė
–jİ
a
xsa
.
Точка А
кривой 2
соответствует режиму короткого замыкания, т.е. значению U
= 0 при I
к
= I
ном
.
Треугольник ABC
называют реактивным
или характеристическим треугольником;
его горизонтальный катет СА
соответствует току возбуждения I
в
.к
, компенсирующему размагничивающее действие реакции якоря Fad
ном
,
а вертикальный катет ВС
-э. д. с, необходимой для компенсации падения напряжения Ia
ном
xsa
при номинальном токе якоря. Для любой другой точки нагрузочной характеристики при φ = 90° составляющая тока возбуждения, компенсирующая размагничивающее действие реакции якоря, останется неизменной, так как величина тока якоря постоянна. Неизменным останется и падение напряжения Ia
ном
xsa
.
Следовательно, нагрузочную характеристику можно получить как след вершины А
реактивного треугольника при перемещении его так, чтобы вершина В
скользила по характеристике холостого хода, а стороны треугольника оставались бы параллельными соответствующим сторонам первоначально построенного треугольника. В этом легко убедиться, рассматривая точку А
' и треугольник А'В'С'
(рис. 1.30) при номинальном напряжении U
ном
. В этом режиме э.д.с.
и напряжение машины Ù = Ė
0
–jİ
a
xad
–jJa
xsa
= Ė
–jİ
a
xsa
.
Точка А
кривой 2
соответствует режиму короткого замыкания, т.е. значению U
= 0 при I
к
= I
ном
.
Треугольник ABC
называют реактивным
или характеристическим треугольником;
его горизонтальный катет СА
соответствует току возбуждения I
в
.к
, компенсирующему размагничивающее действие реакции якоря Fad
ном
,
а вертикальный катет ВС
-э. д. с, необходимой для компенсации падения напряжения Ia
ном
xsa
при номинальном токе якоря. Для любой другой точки нагрузочной характеристики при φ = 90° составляющая тока возбуждения, компенсирующая размагничивающее действие реакции якоря, останется неизменной, так как величина тока якоря постоянна. Неизменным останется и падение напряжения Ia
ном
xsa
.
Следовательно, нагрузочную характеристику можно получить как след вершины А
реактивного треугольника при перемещении его так, чтобы вершина В
скользила по характеристике холостого хода, а стороны треугольника оставались бы параллельными соответствующим сторонам первоначально построенного треугольника. В этом легко убедиться, рассматривая точку А
' и треугольник А'В'С'
(рис. 1.30) при номинальном напряжении U
ном
. В этом режиме э.д.с.
![]() ,
,
т.е. равна ординате точки В';
отрезок ![]() соответствует току I
в.к
, компенсирующему размагничивающее действие реакции якоря. Отрезок
соответствует току I
в.к
, компенсирующему размагничивающее действие реакции якоря. Отрезок ![]() соответствует составляющей тока возбуждения, необходимой для индуктирования э. д. с. Esa
=
Ia
ном
xsa
.
соответствует составляющей тока возбуждения, необходимой для индуктирования э. д. с. Esa
=
Ia
ном
xsa
.
Из рассмотренного вытекает следующий способ определения индуктивного сопротивления xsa
.
На кривой 2
находят точку А',
соответствующую номинальному напряжению U
ном
, и откладывают влево от этой точки отрезок ![]() (его определяют по характеристике короткого замыкания 3
для тока I
к
= I
ном
). Затем через точку О'
проводят прямую, параллельную начальной части характеристики 1
, до пересечения с этой характеристикой в точке В'.
Опустив из точки В'
перпендикуляр на линию О'А',
получают отрезок
(его определяют по характеристике короткого замыкания 3
для тока I
к
= I
ном
). Затем через точку О'
проводят прямую, параллельную начальной части характеристики 1
, до пересечения с этой характеристикой в точке В'.
Опустив из точки В'
перпендикуляр на линию О'А',
получают отрезок ![]() =
Ia
ном
xsa
.
Следовательно,
=
Ia
ном
xsa
.
Следовательно,
![]() .
.
Сопротивление, найденное описанным способом, несколько превышает действительное сопротивление, обусловленное потоками рассеяния:
![]() ,
,
и получило название сопротивления Потье. Сопротивление хр
≈(1,05 ÷1,3) хsa
. Последнее объясняется тем, что в точках В'
и А'
токи возбуждения различны, и, хотя э. д. с. и потоки в воздушном зазоре одинаковы, при большем токе возбуждения имеет место увеличение магнитного сопротивления из-за больших потоков рассеяния обмотки возбуждения, насыщающих полюсы и ярмо индуктора, т.е. реально ![]() .
.
1 .9 Параллельная работа синхронной машиныс сетью
Особенности работы генератора на сеть большой мощности. Обычно электростанции имеют несколько синхронных генераторов для параллельной работы на общую сеть. Это увеличивает общую мощность электростанции (при ограниченной мощности каждого из установленных на ней генераторов), повышает надежность энергоснабжения потребителей и позволяет лучше организовать обслуживание агрегатов. Электрические станции, в свою очередь, объединяют для параллельной работы в мощные энергосистемы, позволяющие наилучшим образом решать задачу производства и распределения электрической энергии. Таким образом, для синхронной машины, установленной на электрической станции, типичным является режим работы на сеть большой мощности, по сравнению с которой мощность рассматриваемого генератора является очень малой. В этом случае сбольшой степенью точности можно принять, что генератор работает параллельно с сетью бесконечно большой мощности, т.е. что напряжение сети U с и ее частота f с являются постоянными, не зависящими от нагрузки данного генератора.
Рассмотрим условия включения генератора на параллельную работу с сетью и способы регулирования нагрузки.
Включение генератора на параллельную работу с сетью. При этом необходимо обеспечить возможно меньший бросок тока в момент присоединения генератора к сети. В противном случае возможны срабатывание защиты, поломка генератора или первичного двигателя.
Ток в момент подключения генератора к сети будет равен нулю, если удастся обеспечить равенство мгновенных значений напряжений сети u с и генератора и:
![]() . (1.29)
. (1.29)
На практике осуществление (1.29) сводится к выполнению трех равенств:
величин напряжений сети и генератора U cm = Um или U с = U;
частот ωс = ωг или f с = f г ;
их начальных фаз αс = αг (совпадение по фазе векторов Ù c и Ù ).
Кроме того, для трехфазных генераторов нужно согласовать порядок чередования фаз.
Совокупность операций, требуемых для подключения генератора к сети, называют синхронизацией. Практически при синхронизации генератора сначала устанавливают номинальную частоту вращения ротора, что обеспечивает приближенное равенство частот f с ≈ f г , а затем, регулируя ток возбуждения, добиваются равенства напряжений U с = U. Совпадение по фазе векторов напряжений сети и генератора (αс = αг ) контролируется специальными приборами – ламповыми и стрелочными синхроноскопами.
Ламповые синхроноскопы применяют для синхронизации генераторов малой мощности и обычно используют в лабораторной практике. Этот прибор представляет собой три лампочки, включенные между фазами генератора и сети (рис. 1.31, а). На каждую лампу действует напряжение Δu = u с –и, которое при f c ≠ f г изменяется с частотой Δf = f с –f г , называемой частотой биений (рис. 1.31, б). В этом случае лампы будут мигать. При f с ≈ f г разность Δи будет изменяться медленно, вследствие чего лампы будут постепенно загораться и погасать. Обычно генератор подключают к сети в момент, когда разность напряжений Δи на короткое время становится близкой нулю, т.е. в середине периода погасания ламп; в этом случае выполняется условие совпадения по фазе векторов Ù с и Ù. Для более точного определения этого момента часто применяют нулевой вольтметр, имеющий растянутую шкалу в области нуля. После включения генератора в сеть дальнейшая синхронизация частоты вращения ротора, т.е. поддержание условия n 2 = n 1 , происходит автоматически.
Генераторы большой мощности синхронизируют с помощью стрелочных синхроноскопов, работающих по принципу вращающегося магнитного поля. В этом приборе при f c ≠ f г стрелка вращается с частотой, пропорциональной разности частот f c – f г в одну или другую сторону в зависимости от того, какая из этих частот больше. При f c = f г она устанавливается на нуль; в этот момент и следует подключать генератор к сети. На электрических станциях обычно используют автоматические приборы для синхронизации генераторов без участия обслуживающего персонала.
Часто также применяют метод самосинхронизации, при котором генератор подключается к сети при отсутствии возбуждения (обмотка возбуждения замыкается на активное сопротивление). При самосинхронизации ротор разгоняется до частоты вращения, близкой к синхронной (допускается скольжение s до 2%), за счет вращающего момента первичного двигателя и асинхронного момента, обусловленного индуктированием тока в успокоительной обмотке и замкнутой обмотке возбуждения. После этого в обмотку возбуждения подается постоянный ток, что приводит к втягиванию ротора в синхронизм. При методе самосинхронизации в момент включения генератора возникает сравнительно большой толчок тока, который не должен превышать 3,5Iа ном .
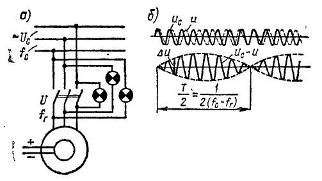
Рис. 1.31–Схема подключения синхронного генератора к сетис помощью лампового синхроноскопа (а) и кривые изменения напряжений ис ии перед включением (б) генератора
Регулирование активной мощности . После включения генератора в сеть его напряжение U становится равным напряжению сети U c . По отношению к внешней нагрузке напряжения U и U с совпадают по фазе, а по контуру «генератор – сеть» находятся в противо-фазе, т.е. Ù = – Ù c (рис. 1.32, а ). Так как перед включением в сеть генератор работал вхолостую, то при выполнении указанных ранее трех условий, необходимых для синхронизации генератора, его ток Iа после подключения к сети также будет равен нулю. Рассмотрим, какими способами можно регулировать ток Iа при работе генератора параллельно с сетью на примере неявно-полюсной машины.
Ток, проходящий по обмотке якоря неявнополюсного генератора, можно определить из уравнения (1.19в):
![]() . (1.30)
. (1.30)
Так как Ù = – Ù c = const, то величину тока İа можно изменять только двумя способами: изменяя э.д. с. Ė 0 по величине или по фазе.
Если к валу генератора приложить внешний момент, больший момента, необходимого для компенсации потерь мощности в стали и механических потерь, то ротор приобретает ускорение, вследствие чего вектор Ė 0 смещается относительно вектора Ù на некоторый угол θ в сторону вращения векторов (рис. 1.32, б). При этом возникает разность векторов Ė 0 – Ù, приводящая согласно (1.30) к появлению тока İа . Вектор этого тока опережает на 90° вектор – jİа x сн и сдвинут относительно вектора Ù на некоторый угол φ, меньший 90°. При работе в рассматриваемом режиме генератор отдает в сеть активную мощность P = mUIa cosφ и на вал его действует электромагнитный тормозной момент, который уравновешивает вращающий момент первичного двигателя, вследствие чего частота вращения ротора остается неизменной. Чем больший внешний момент приложен к валу генератора, тем больше будет угол θ, а следовательно, ток и мощность, отдаваемые генератором в сеть.
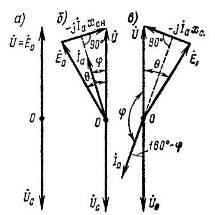
Рис. 1.32![]() –Упрощенные векторные диаграммы неявнополюсной синхронной машиныпри параллельной работе с сетью в режимах:
–Упрощенные векторные диаграммы неявнополюсной синхронной машиныпри параллельной работе с сетью в режимах:
а – холостого хода; б–генераторном; в-двигательном
Если к валу ротора приложить внешний тормозной момент, то вектор Ė 0 будет отставать от вектора напряжения Ù на угол θ (рис. 1.32, в ). При этом возникает ток Iа , вектор которого опережает на 90° вектор – jİа х сн и сдвинут на некоторый угол φ относительно вектора напряжения Ù. Так как угол φ>90°, активная составляющая тока находится в противофазе с напряжением Ù машины. Следовательно, в рассматриваемом режиме активная мощность Р= тÙİа соsφ забирается из сети и машина работает двигателем, создавая электромагнитный вращающий момент, который уравновешивает внешний тормозной момент; частота вращения ротора при этом снова остается неизменной.
Таким образом, для увеличения нагрузки генератора необходимо увеличивать приложенный к его валу внешний момент (т.е. вращающий момент первичного двигателя), а для уменьшения нагрузки – уменьшать этот момент. При изменении направления внешнего момента (если вал ротора не вращать, а тормозить) машина автоматически переходит из генераторного режима в двигательный.
Регулирование реактивной мощности. Если в машине, подключенной к сети и работающей в режиме холостого хода (рис. 1.33, а ), увеличить ток возбуждения I в , то возрастет э. д. с. Е 0 (рис. 1.33, б) и по обмотке якоря будет проходить ток Iа , величина которого согласно (1.30) определяется только индуктивным сопротивлением х сн машины. Следовательно, ток İ a будет реактивным: он отстает по фазе от напряжения Ù на угол 90е или опережает на тот же угол напряжение сети Ù с .
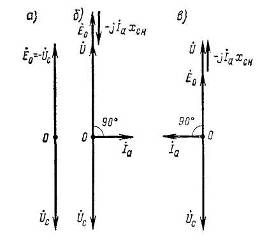
Рис. 1.33–Упрощенные векторные диаграммы неявнополюсной синхронной машиныпри параллельной работе с сетью, отсутствии активной нагрузкии изменении э. д. с. Е0 путем регулирования тока возбуждения:
а – при E0 = Uс ; б – при Е0 > Uс ; в-при E0 < Uc
При уменьшении тока возбуждения ток İа изменит свое направление: он будет опережать на 90° напряжение Ù (рис. 1.33, в) и отставать на 90° от напряжения Ù с . Таким образом, при изменении тока возбуждения изменяется лишь реактивная составляющая тока İа , т.е. реактивная мощность машины Q= mUIa sinφ. Активная составляющая тока İ a в рассматриваемых случаях равна нулю. Следовательно, активная мощность Р эл = 0, и машина работает в режиме холостого хода.
При работе машины под нагрузкой имеют место те же условия: при изменении тока возбуждения изменяется лишь реактивная составляющая тока Iа ,т.е. реактивная мощность машины Q. Режим возбуждения синхронной машины, при котором реактивная составляющая тока İ a равна нулю, называют режимом полного или нормального возбуждения. Если ток возбуждения I в больше тока I в.п , при котором имеет место режим полного возбуждения, то ток Iа содержит отстающую от U реактивную составляющую, что соответствует активно-индуктивной нагрузке генератора. Такой режим называют режимом перевозбуждения. Если ток возбуждения I в меньше тока I в.п , то ток Iа содержит реактивную составляющую, опережающую напряжение U, что соответствует активно-емкостной нагрузке генератора. Такой режим называют режимом недовозбуждения.
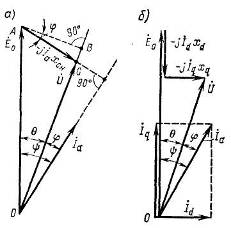
Рис. 1.34–Определение активной и реактивной мощностей по упрощеннымвекторнымдиаграммам неявнополюсного (а) и явнополюсного (б)синхронных генераторов
Возникновение реактивной составляющей тока Ia
физически объясняется тем, что при работе синхронной машины на сеть бесконечно большой мощности суммарный магнитный поток, сцепленный с каждой из фаз ![]() , не зависит от тока возбуждения и при всех условиях остается неизменным, так как
, не зависит от тока возбуждения и при всех условиях остается неизменным, так как
![]() . (1.31)
. (1.31)
Следовательно, если ток возбуждения I в (т.е. поток Фв и э. д. с. Е 0 )становится большим, чем это требуется для полного возбуждения, то возникает отстающая составляющая тока I а , которая создает размагничивающий поток реакции якоря Фа ; при I в меньшем, чем необходимо для полного возбуждения, возникает опережающая составляющая тока Iа , которая создает подмагничивающий поток реакции якоря Фа . Во всех случаях суммарный поток машины ∑Ф автоматически поддерживается неизменным.
1.10 Мощность и электромагнитный моментсинхронной машины. статическая устойчивость
Активная мощность. Чтобы установить, как зависит активная мощность Р синхронной машины от угла нагрузки θ, рассмотрим упрощенные векторные диаграммы (рис. 1.34), построенные при rа = 0. Для неявнополюсной машины из диаграммы (рис. 1.34, а) можно установить, что общая сторона АВ треугольников ОАВ и АСВ
![]()
или с учетом модулей соответствующих векторов
![]() . (1.32)
. (1.32)
Следовательно, активная мощность машины
![]() . (1.33а)
. (1.33а)
Для явнополюсной машины следует исходить из векторной диаграммы, приведенной на рис. 1.34, б. Так какφ = ψ – θ, то активная мощность
 . (1.33б)
. (1.33б)
Чтобы определить токи Id и Iq , спроектируем модули векторов э. д. с. Ė 0 , напряжения Ù и падений напряжения – jİd xd и – jİ q xq на оси, параллельную и перпендикулярную вектору Ė 0 (см. рис. 1.34, б ). Тогда получим E 0 = U cosθ + Id xd и U sinθ = Iq xq , откуда
![]() ;
;  . (1.34)
. (1.34)
Подставляя значения Id иIq в (1.33б), получим
![]()
или, используя формулу sin2θ = 2 sinθ·cosθ,
 .
.
Электромагнитный момент. В синхронных машинах большой и средней мощности потери мощности в обмотке якоря ΔPa эл = mIa 2 ra малы по сравнению с электрической мощностью Р, отдаваемой (в генераторе) или потребляемой (в двигателе) обмоткой якоря. Поэтому если пренебречь величиной ΔPа эл , то можно считать, что электромагнитная мощность машины Р эм = Р .
Электромагнитный момент пропорционален мощности Р эм . Поэтому для неявнополюсной и явнополюсной машин:
![]() ; (1.35а)
; (1.35а)
 . (1.35б)
. (1.35б)
Первый член формулы (1.35б) физически представляет собой основной момент, получающийся в результате взаимодействия вращающегося магнитного поля с током ротора, а второй член–так называемый реактивный момент, возникающий из-за стремления ротора ориентироваться по оси результирующего поля. Последний существует даже при отсутствии тока возбуждения (когда E 0 = 0). В частном случае неявнополюсной машины, когда xd = xq = х сн ,формула (1.35б) принимает вид формулы (1.35а).
При неявнополюсной машине зависимость М = f (θ) представляет собой синусоиду, симметричную относительно осей координат (рис. 1.35, кривая 1 ). При явнополюсной машине из-за неодинаковой магнитной проводимости по различным осям (хd ≠ хq )возникает реактивный момент
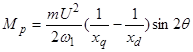 , (1.36)
, (1.36)
в результате чего зависимость М = f (θ) несколько искажается (кривая 2 ). Реактивный момент, как следует из (1.35б), пропорционален sin2θ (кривая 3 ). Так как электромагнитная мощность Р эм пропорциональна моменту, то приведенные на рис. 1.35 характеристики представляют собой в другом масштабе зависимости Р эм = f (θ) или при принятом предположении (ΔРа эл = 0) зависимости P = f (θ);их называют угловыми характеристиками.
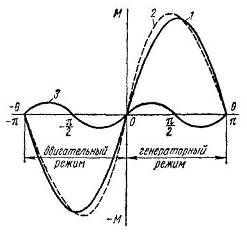
Рис. 1.35–Угловые характеристики электромагнитного момента Мдля явнополюсной и неявнополюсной машин
Форма кривой М
= f
(θ) обусловлена тем, что потоки ![]() и
и ![]() сдвинуты между собой на тот же угол θ, что и векторы Ė
0
и Ù
(векторы
сдвинуты между собой на тот же угол θ, что и векторы Ė
0
и Ù
(векторы ![]() и
и ![]() опережают Ė
0
и Ù
на 90°). Поэтому если угол θ = 0 (холостой ход), то между ротором и статором существуют только силы притяжения f
, направленные ра-диально (рис. 1.36, а
), и электромагнитный момент равен нулю. При θ > 0 (генераторный режим) ось потока возбуждения Фв
(полюсов ротора) опережает ось суммарного потока ∑Ф на угол θ (рис. 1.36, б
), вследствие чего электромагнитные силы f
, возникающие между ротором и статором, образуют тангенциальные составляющие, которые создают тормозной момент М.
Максимум момента соответствует значению θ = 90°, когда ось полюсов ротора расположена между осями суммарного потока статора.
опережают Ė
0
и Ù
на 90°). Поэтому если угол θ = 0 (холостой ход), то между ротором и статором существуют только силы притяжения f
, направленные ра-диально (рис. 1.36, а
), и электромагнитный момент равен нулю. При θ > 0 (генераторный режим) ось потока возбуждения Фв
(полюсов ротора) опережает ось суммарного потока ∑Ф на угол θ (рис. 1.36, б
), вследствие чего электромагнитные силы f
, возникающие между ротором и статором, образуют тангенциальные составляющие, которые создают тормозной момент М.
Максимум момента соответствует значению θ = 90°, когда ось полюсов ротора расположена между осями суммарного потока статора.
При θ < 0 (двигательный режим) ось потока возбуждения отстает от оси суммарного потока (рис. 1.36, в), вследствие чего тангенциальные составляющие электромагнитных сил, возникающих между ротором и статором, создают вращающий момент.
Условия статической устойчивости. Угловая характеристика синхронной машины имеет важное значение для оценки ее статической устойчивости и степени перегружаемости. Под статической устойчивостью
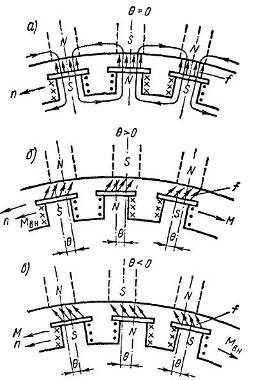
Рис. 1.36–Картина взаимодействия потоков Фв и ∑Ф в синхронной машине
синхронной машины, работающей параллельно с сетью, понимается ее способность сохранять синхронное вращение (т.е. условие n 2 = n 1 )при изменении внешнего вращающего момента М вн , приложенного к его валу. Статическая устойчивость обеспечивается только при углах θ, соответствующих М < М макс .
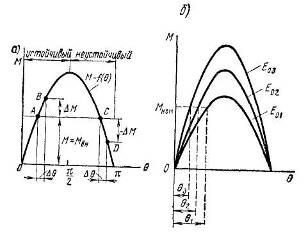
Рис. 1.37–Зоны устойчивой и неустойчивой работы на угловой характеристике синхронного генератора (а) и угловые характеристикипри различных токах возбуждения (б)
Рассмотрим более подробно этот вопрос. Допустим, что генератор работает при некотором внешнем моменте М вн , передаваемом его ротору от первичного двигателя. При этом ось полюсов ротора сдвинута на некоторый угол θ относительно оси суммарного потока ∑Ф и машина развивает электромагнитный момент М, который можно считать равным М вн (рис. 1.37, а, точки А и С ). Если момент М вн возрастает, то ротор генератора ускоряется, что приводит к увеличению угла θ до θ + Δθ. При работе машины в точке А возрастание угла θ вызывает увеличение электромагнитного момента до величины М + ΔМ (точка В); в результате равновесие моментов, действующих на вал ротора, восстанавливается и машина после некоторого колебательного процесса продолжает работать с синхронной частотой вращения. Аналогичный процесс имеет место и при уменьшении М вн ;при этом соответственно уменьшаются угол θ и момент М, а следовательно, равновесие моментов также восстанавливается. Однако если машина работает при π/2 < θ < π
(точка С), то увеличение угла θ вызывает уменьшение электромагнитного момента до величины М – ΔM (точка D ).В результате равновесие моментов, действующих на вал ротора, нарушается, ротор продолжает ускоряться, а угол θ–возрастать. Возрастание угла θ может привести к двум результатам: 1) машина перейдет в точку устойчивой работы (аналогичную точке А) на последующих положительных полуволнах; 2) ротор по инерции проскочит устойчивые положения и произойдет выпадение из синхронизма, т.е. ротор начнет вращаться с частотой, отличающейся от частоты вращения магнитного поля статора.
Выпадение из синхронизма является аварийным режимом, так как оно сопровождается протеканием по обмотке якоря больших токов. Это объясняется тем, что э.д. с. генератора Е и напряжение сети U c при указанном режиме могут складываться по контуру «генератор–сеть», а не вычитаться, как при нормальной работе.
Если внешний момент по какой-либо причине снижается, то при работе машины в точке С угол θ уменьшается, возрастает электромагнитный момент, что приводит к дальнейшему уменьшению угла θ и переходу к работе в устойчивой точке А.
Из рассмотрения рис. 1.37, а следует, что синхронная машина работает устойчиво, если dM/ dθ > 0, и неустойчиво, если dM/ dθ < 0; чем меньше угол θ, тем более устойчиво работает машина.
Если машина работает в установившемся режиме при некотором угле θ, то малое отклонение Δθ от этого угла сопровождается возникновением момента ΔM = ( dM/ dθ) Δθ, который стремится восстановить исходный угол θ. Этот момент называют синхронизирующим. Ему соответствует понятие синхронизирующей мощности ΔP эм = ( dP эм / dθ) Δθ.
Производные dM/ dθ и dP эм / dθ называют соответственно коэффициентами синхронизирующего момента и синхронизирующей мощности (иногда их называют удельным синхронизирующим моментом и удельной синхронизирующей мощностью). При неявнополюсной машине
![]() ;
; ![]() .
.
Коэффициент синхронизирующего момента имеет максимальное значение при θ = 0 и уменьшается с возрастанием θ; при θ ≈π/2 он обращается в нуль, поэтому синхронные машины обычно работают с θ = 20÷35°, что соответствует двукратному или несколько большему запасу по моменту.
Статическая перегружаемость синхронной машины оценивается отношением
![]() . (1.37)
. (1.37)
Согласно ГОСТу это отношение для турбогенераторов и гидрогенераторов должно быть не менее 1,6–1,7, а для синхронных двигателей большой и средней мощности – не менее 1,65.
Коэффициент синхронизирующего момента имеет максимальное значение при θ = 0 и уменьшается с возрастанием θ; при θ ≈ π/2 он обращается в нуль, поэтому синхронные машины обычно работают с θ = 20 ÷ 35°, что соответствует двукратному или несколько большему запасу по моменту.
Статическая перегружаемость синхронной машины оценивается отношением
Согласно ГОСТу это отношение для турбогенераторов и гидрогенераторов должно быть не менее 1,6 – 1,7, а для синхронных двигателей большой и средней мощности – не менее 1,65.
Влияние тока возбуждения на устойчивость. Устойчивость генератора при заданной величине активной мощности, отдаваемой в сеть, зависит от тока возбуждения. При увеличении тока возбуждения возрастает э.д.с. Е 0 и, следовательно, момент М макс ; при этом увеличивается устойчивость машины.
На рис. 1.37, б изображены угловые характеристики М = f (θ) при различных токах возбуждения (при различных Е 0 ), откуда следует, что чем больше ток возбуждения, тем меньше угол θ при заданной нагрузке, а следовательно, тем больше отношение М макс /М ном и перегрузочная способность генератора.
Обычно электрическая сеть, на которую работают синхронные генераторы, создает для них активно-индуктивную нагрузку (генераторы отдают как активную Р, так и реактивную Q мощности). При этом синхронные генераторы должны работать с некоторым перевозбуждением, обеспечивающим повышение перегрузочной способности. Так, например, согласно ГОСТ в синхронных генераторах при номинальном режиме ток İ a должен опережать напряжение сети Ù с (т.е. отставать от напряжения Ù) и иметь cosφ = 0,8. Однако если сеть создает активно-емкостную нагрузку (например, при подключении к ней большого числа статических или вращающихся компенсаторов), то генератор для поддержания стабильного напряжения должен будет работать с недовозбуждением, т.е. потреблять реактивную мощность. Такой режим будет для него весьма неблагоприятным, так как при уменьшении тока возбуждения и заданной активной мощности Р возрастает угол θ и снижается перегрузочная способность М макс /М ном , определяющая статическую устойчивость машины.
Реактивная мощность. Для установления зависимости реактивной мощности Qот угла нагрузки θ в неявнополюсной машине рассмотрим треугольник ОАВ (см. рис. 1.34, а ). Сторона этого треугольника
![]()
или с учетом модулей соответствующих векторов
![]() . (1.38)
. (1.38)
Следовательно, реактивная мощность машины
![]() . (1.39а)
. (1.39а)
При явнополюсной машине (см. рис. 1.34, б)
 . (1.39б)
. (1.39б)
Подставляя в (1.39б) значения токов Id и Iq из (1.34), имеем
![]() .
.
Заменив cos2 θ и sin2 θ их значениями через функции двойного угла 2θ, получим
 . (1.39в)
. (1.39в)
На рис. 1.38 показаны зависимости величин активной Р и реактивной Q мощностей от угла θ для неявнополюсной машины в пределах изменения угла – π/2 < θ < π/2.
В формуле (1.39в) и на рис. 1.38 положительному значению реактивной мощности соответствует режим, когда реактивная составляющая тока якоря отстает от вектора напряжения генератора, т.е. когда машина работает с перевозбуждением. В этом режиме по отношению к сети реактивная мощность генератора эквивалентна реактивной мощности конденсатора.
Максимальная реактивная мощность неявнополюсной машины соответствует θ = 0, т.е. имеет место при холостом ходе машины:
![]() . (1.40)
. (1.40)
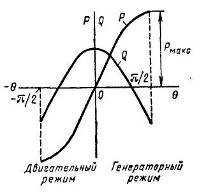
Рис. 1.38–Зависимости мощностей Р и Qот угла нагрузки θдля неявнополюсной машины
1. 11 Режимы работы синхронного генераторапри параллельном включении с сетью
Изменение активной и реактивной мощностей синхронного генератора, работающего параллельно с сетью большой мощности, происходит при изменении внешнего момента и тока возбуждения.
Для того чтобы обеспечить требуемый режим работы генератора, обычно одновременно регулируется и ток возбуждения, и вращающий момент.
Методически проще разобрать два предельных случая регулирования:
а) момента при неизменном токе возбуждения;
б) тока возбуждения при неизменном внешнем моменте.
Работа генератора с неизменным током возбуждения при различных значениях момента. Для генератора с неявно выраженными полюсами векторную диаграмму (рис. 1.39, а) строят по уравнению
![]() .
.
На векторной диаграмме показан вектор напряжения сети Ù с , который по контуру обмотки генератора имеет направление, встречное к вектору напряжения генератора, т.е. Ù = – Ù с .
![]() Если генератор работает с cosφ = 1, то вектор тока якоря İ
a1
совпадает по направлению с вектором напряжения Ù,
а вектор э. д. с. Ė
02
опережает эти векторы на угол θ1
. При изменении нагрузки, например при ее возрастании, угол θ должен увеличиться до какого-то значения θ2
в соответствии с возрастанием мощности от PI
до РII
.
Если генератор работает с cosφ = 1, то вектор тока якоря İ
a1
совпадает по направлению с вектором напряжения Ù,
а вектор э. д. с. Ė
02
опережает эти векторы на угол θ1
. При изменении нагрузки, например при ее возрастании, угол θ должен увеличиться до какого-то значения θ2
в соответствии с возрастанием мощности от PI
до РII
.
Принимая полезную мощность (отдаваемую в сеть) равной электромагнитной
![]()
![]()
для соотношения мощностей РI и РII получим
![]() .
.
Таким образом, при увеличении мощности с РI до РII вектор э. д. с. Ė 0 повернется в сторону опережения и образует с вектором Ù угол θ2 . Легко заметить, что при изменении нагрузки конец вектора Ė 0 будет скользить по окружности, радиус которой равен модулю Е 0 , так как ток возбуждения остается неизменным.
Соединив конец вектора Ù с концом вектора Ė 01 , получим вектор jİ a 2 x сн , после чего построим вектор тока İа 2 ; он будет перпендикулярен падению напряжения jİ a 2 x сн , а его модуль определится из соотношения
![]() .
.
Если момент, приложенный к валу генератора, уменьшен посравнению с моментом в исходном режиме, то новый угол θ, будет меньше угла θ1 . Построение всех векторов (рис. 1.39, а )на диаграмме и в этом случае производится аналогично описанному в предшествующем примере.
Приведенные диаграммы показывают, что при изменении внешнего момента, приложенного к валу синхронного генератора, работающего параллельно с сетью, изменяется не только активная мощность, но и реактивная. Поэтому обычно, для того чтобы обеспечить наиболее благоприятный или требуемый режим работы, при изменении активной мощности приходится регулировать и ток возбуждения.
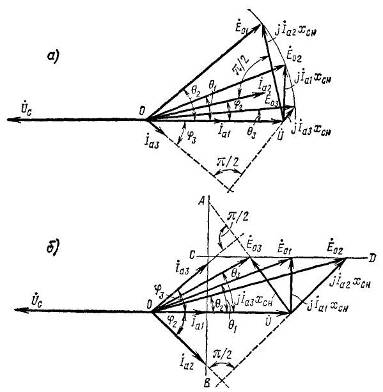
Рис. 1.39 – Векторные диаграммы синхронного генератора при Iв = const, М = varи Iв = var, М = const
Работа генератора с неизменным моментом при различных значениях тока возбуждения. Неизменность внешнего момента на валу генератора эквивалентна неизменности его мощности:
![]() .
.
При работе на сеть большой мощности Ù = – Ù c = const, следовательно, при изменении тока возбуждения останется постоянной активная составляющая тока якоря Ia cosφ = const.
На векторной диаграмме (рис. 1.39, б )это условие выразится в том, что конец вектора тока будет скользить по прямой АВ, перпендикулярной вектору напряжения Ù.
Однако при неизменной мощности (для машины с неявно выраженными полюсами) справедливо будет условие
![]() .
.
При изменении тока возбуждения остаются неизменными все величины, кроме Е 0 и sinθ; следовательно, условие неизменной мощности приводит к условию
![]() .
.
На диаграмме (рис. 1.39, б ) конец вектора Ė 0 скользит по прямой CD, параллельной вектору напряжения Ù. Чем меньше ток возбуждения, тем меньше по модулю вектор Ė 0 , но зато больше угол θ.
Вектор тока İа перпендикулярен направлению вектора падения напряжения jİ a x сн ,поэтому его можно построить, если задаться углом θ. Легко заметить, что минимальному значению тока Iа соответствует режим работы при cosφ = 1, чему отвечает вполне определенный ток возбуждения.
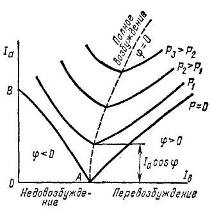
Рис. 1.40 – U-образные характеристики синхронного генератора
Зависимость тока якоря от тока возбуждения, называемая U-образной характеристикой, представлена на рис. 1.40. Для каждой мощности имеется вполне определенный ток возбуждения, которому соответствует минимум тока якоря. Чем больше мощность, тем большим должен быть ток возбуждения, отвечающий минимальному току якоря. Штриховая кривая, проведенная через точки минимумов, соответствует режимам работы генератора с соsφ = 1.
1.12 Особенности работы синхронного генератора на выпрямительную нагрузку
В последнее время все более часто генератор постоянного тока заменяют синхронным генератором, на выходе которого включен полупроводниковый выпрямитель (рис. 1.41). Замена генератора постоянного тока синхронным дает возможность выполнить его более быстроходным, что в свою очередь позволяет существенно уменьшить габариты и массу машины. Это объясняется тем, что в машинах постоянного тока для обеспечения удовлетворительной коммутации (см. гл. X) приходится ограничивать окружную скорость коллектора, а следовательно, и ротора. Кроме того, эксплуатация синхронного генератора, в котором отсутствует коллектор, существенно проще, а надежность выше, чем у генератора постоянного тока.
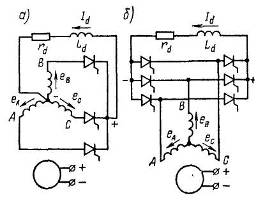
Рис. 1.41 – Схемы синхронного генератора, работающего на выпрямитель при трехфазной нулевой (а) и мостовой (б) схемах выпрямления
При работе генератора в схеме, на выходе которой включен выпрямитель, ток в фазах обмотки якоря является несинусоидальным. В зависимости от схемы включения вентилей этот ток будет представлять собой ряд или однополярных, или двухполярных импульсов, форма которых близка к трапеции (рис. 1.42, а, б). В ряде случаев выпрямитель, включенный на выход синхронного генератора, выполняют управляемым (на тиристорах). Задерживая моменты открытия тиристоров на некоторый угол α (угол регулирования) относительно моментов, соответствующих началу прохождения тока через вентили в схеме неуправляемого выпрямителя (на диодах), можно по желанию изменять среднюю величину выпрямленного напряжения. Применение управляемого выпрямителя позволяет осуществлять быстродействующее регулирование синхронного генератора, так как при этом не требуется изменять его ток возбуждения. В этом случае можно также питать от одного генератора несколько нагрузок, регулируя напряжение на каждой из них независимо от других.
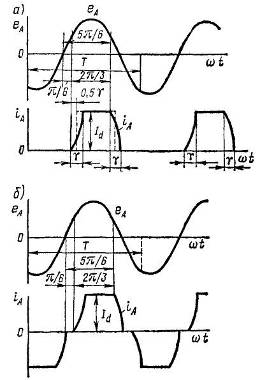
Рис. 1.42 – Графики изменения э. д. с. и тока в фазе обмотки якоря при работе синхронного генератора на выпрямительную нагрузку
Обычно нагрузка (на стороне постоянного тока) имеет большую индуктивность, вследствие чего ток нагрузки Id в большинстве случаев может быть принят постоянным. Переход тока от одной фазы обмотки якоря к другой не может происходить мгновенно из-за индуктивности этих фаз. Поэтому в течение времени, соответствующего углу коммутации γ, ток проходит одновременно через два вентиля и две фазы: в одной он возрастает от нуля до Id , а в другой уменьшается (рис. 1.43). В результате первая гармоника тока фазы отстает от напряжения генератора на угол, примерно равный (0,5 ÷ 0,6) γ. При включении на выход генератора управляемого выпрямителя первая гармоника тока фазы отстает от э. д. с. на угол α + 0,5γ. Угол коммутации γ может быть вычислен по формуле
![]() ,
,
где х к – сопротивление фазы в режиме коммутации; Е к – действующее значение фазной э.д.с. за сопротивлением х к .
При коммутации одновременно открыты однополярные вентили двух фаз (рис. 1.43), вследствие чего эти фазы оказываются замкнутыми накоротко и ток из одной фазы переходит в другую под действием разности фазных э.д.с.
Так как время коммутации вентилей очень мало (доли периода), электромагнитные процессы в машине протекают в это время так же, как и на начальном этапе внезапного двухфазного короткого замыкания (см. 1.18). При этом в качестве сопротивления х к следует принимать индуктивное сопротивление для этого режима
![]() .
.
Физически это означает, что несииусоидальный ток в обмотке якоря создает высшие гармоники м. д с якоря и соответствующие потоки, которые индуктируют в демпферной обмотке и обмотке возбуждения высшие гармоники э. д. с. и токов. В результате этого форма и величина результирующего магнитного потока остаются практически неизменными.
Векторная диаграмма неявнополюсного синхронного генератора, работающего на выпрямительную нагрузку, показана на рис. 1.44, а и соответствует уравнению:
![]() . (1.41)
. (1.41)
В данном случае берется первая гармоника тока Ia , a э. д. с. Е 0 и Е к практически синусоидальны, так как индуктируются синусоидальным магнитным потоком.
Для машины с явно выраженными полюсами векторная диаграмма (рис. 1.44, б) строится по уравнению:
![]() . (1.41)
. (1.41)
Вектор первой гармоники напряжения на диаграмме обычно не показывают, так как для генератора, нагруженного на выпрямитель, важным является среднее значение выпрямленного напряжения Ud .
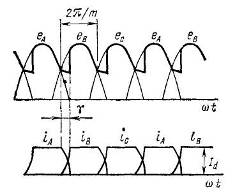
Рис. 1.43–Графики изменения э д с, напряжения и тока в фазах обмотки якоряс учетом коммутации тока в выпрямителе
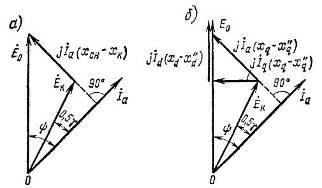
Рис. 1.44–Векторные диаграммы синхронного генератора,работающего на выпрямительную нагрузку
При рассмотрении рис. 1.43 легко заметить, что в период коммутации вентилей, включенных, например, в фазы А и В, мгновенное значение выпрямленного напряжения ud = 0,5 (е А – е В ), т.е. меньше, чем при отсутствии коммутации. Следовательно, наличие индуктивного сопротивления х к приводит к уменьшению среднего значения выпрямленного напряжения Ud по сравнению с его значением Ud 0 при отсутствии коммутации и к увеличению пульсаций в кривой выпрямленного напряжения (показана жирной линией на рис. 1.43).
Величина среднего выпрямленного напряжения с учетом коммутации тока в выпрямителе при Id = const
![]() ,
,
где Ud 0 –среднее значение выпрямленного напряжения без учета коммутации тока в выпрямителе (идеализированные условия); ΔU к = mnId x к /(2π) – среднее значение падения напряжения, обусловленного коммутацией тока в выпрямителе; n – число последовательно включенных коммутационных групп вентилей («1» – при нулевой и «2» – при мостовой схемах).
При этом в общем случае
![]() .
.
При включении выпрямителя по трехфазной нулевой схеме Ud 0 = 1,17E к , а по трехфазной мостовой схеме Ud 0 = 2,34E к , так как к вентилям приложена линейная э. д. с. и схема выпрямления эквивалентна шестифазной.
Использование мощности. При работе синхронного генератора на выпрямитель реализуемая мощность становится меньше номинальной мощности или, как говорят, использование генератора ухудшается. Рассмотрим этот вопрос применительно к двум наиболее распространенным схемам выпрямления, заменив для простоты реальную форму тока прямоугольной с высотой Id , как это показано на рис. 1.42, а штриховой линией.
При трехфазной нулевой схеме выпрямления (рис. 1.41, а ) мощность одной фазы генератора
 . (1.42)
. (1.42)
При прямоугольной форме тока действующее значение тока в любой фазе ![]() ,
где τ = T
/3-время прохождения тока через данную фазу; Т
– период изменения тока. Следовательно, мощность фазы
,
где τ = T
/3-время прохождения тока через данную фазу; Т
– период изменения тока. Следовательно, мощность фазы
![]() . (1.42)
. (1.42)
Поскольку мощность одной фазы синхронного генератора при работе без выпрямителя Р ф = Ia Ea cos φ, то коэффициент использования генератора при трехфазной нулевой схеме выпрямления
![]() .
.
Таким образом, при cosφ =l и α = 0, т.е. при отсутствии регулирования, мощность генератора, работающего на выпрямитель, снижается примерно на 1/3 по сравнению с мощностью генератора, работающего на чисто активную нагрузку. Объясняется это тем, что ток проходит через фазу только в течение 1/3 периода.
Лучшее использование генератора обеспечивается при применении трехфазной мостовой схемы выпрямления (рис. 1.41, б ), при которой ток проходит через фазу в течение 2/3 периода. В этом случае мощность одной фазы генератора
 , (1.42в)
, (1.42в)
а действующее значение тока фазы Ia = Id √ 2/3. Следовательно, мощность фазы генератора
![]() , (1.42 г.)
, (1.42 г.)
а коэффициент использования
![]() .
.
При увеличении угла регулирования αиспользование ухудшается, так как уменьшается среднее значение выпрямленного напряжения. Одновременно в этом случае первая гармоника тока якоря İа все более отстает по фазе от э. д. с. Ė к , вследствие чего возрастает размагничивающее действие реакции якоря. При построении векторной диаграммы синхронного генератора, работающего на выпрямительную нагрузку, вектор якоря Iа будет отставать на угол α + 0,5γ от вектора э. д. с. Ė к , а величина cos (α + 0,5γ) будет играть приблизительно такую же роль, как и cosφ при работе генератора на активно-индуктивную нагрузку (без выпрямителя).
Потери мощности. Высшие гармоники тока якоря создают дополнительные электрические потери в проводниках обмотки якоря (из-за явления вытеснения тока), увеличивая на 5–8% основные электрические потери в ней. Дополнительные магнитные потери в стали магнитопровода, появляющиеся от высших гармоник поля, очень невелики, так как высшие гармоники м.д. с. существенно уменьшаются токами демпферной обмотки. Генераторы, работающие на выпрямитель, целесообразно снабжать мощными демпферными обмотками еще и потому, что это уменьшает сверхпереходные индуктивности (см. 1.18), от которых зависит угол коммутации γ, влияющий на использование генератора.
1. 13 Синхронный двигатель
Как было показано ранее, синхронная машина, работающая параллельно с сетью, автоматически переходит в двигательный режим, если к валу ротора приложен тормозной момент. При этом машина начинает потреблять из сети активную мощность и возникает электромагнитный вращающий момент. Частота вращения ротора остается неизменной, жестко связанной с частотой сети соотношением n 2 , = n 1 = 60f 1 /p, что является важнейшим эксплуатационным свойством синхронных двигателей.
Векторные диаграммы. По основным комплексным уравнениям синхронной машины (1.19в) и (1.23б) могут быть построены векторные диаграммы. Однако для синхронного двигателя в указанные уравнения вместо величины Ù надо подставить – Ù с , так как не принято говорить о «напряжении двигателя»; при этом для не-явнополюсной и явнополюсной машин будем иметь:
 . (1.43)
. (1.43)
Построение векторных диаграмм (рис. 1.45, а, б) по формулам системы (1.43) рекомендуется начинать с изображения векторов Ù с и – Ù с . Далее строится вектор тока İа , активная составляющая которого совпадает с направлением вектора Ù c , и определяют вектор Ė 0 . При построении диаграммы для явнополюсной машины (рис. 1.45, б) нужно так же, как это делалось в диаграмме для генератора (см. рис. 1.25, в ), вначале определить направление вектора Ė 0 , прибавив к – Ù c вспомогательный вектор
![]()
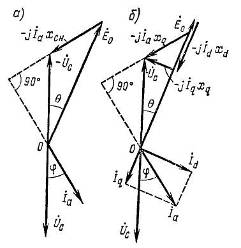
Рис. 1.45–Упрощенные векторные диаграммы синхронного неявнополюсного (а) иявнополюсного (б) двигателя
Для выяснения свойств синхронного двигателя рассмотрим его работу при изменении нагрузочного момента М вн и постоянном токе возбуждения; при этом для простоты будем пользоваться векторной диаграммой неявнополюсной машины. Допустим, что двигатель работает при cosφ = l, чему на векторной диаграмме (рис. 1.46, а) соответствуют ток İа 1 и угол θ 1 . С повышением нагрузки увеличивается угол между векторами Ė 0 и – Ù с до какого-то значения θ2 , так как согласно (1.35а) вращающий момент М = М вн пропорционален sinθ. При этом конец вектора Ė 0 перемещается по окружности с радиусом, равным Е 0 , и при принятых условиях (I в = const; E 0 = const и U c = const) вектор тока İа 2 также поворачивается вокруг точки 0, располагаясь перпендикулярно вектору – jİа 2 x сн Из диаграммы видно, что в рассматриваемом случае ток двигателя İа2 будет иметь отстающую реактивную составляющую.
Если нагрузка двигателя снизится по сравнению с исходной, то угол θ уменьшится до значения θ3 . При этом ток двигателя İа 3 будет иметь опережающую реактивную составляющую.
Следовательно, изменение активной мощности синхронного двигателя приводит к изменению его cosφ: при уменьшении нагрузки вектор тока поворачивается в сторону опережения и двигатель может работать с cosφ = 1 или с опережающим током; при увеличении нагрузки вектор тока поворачивается в сторону отставания.
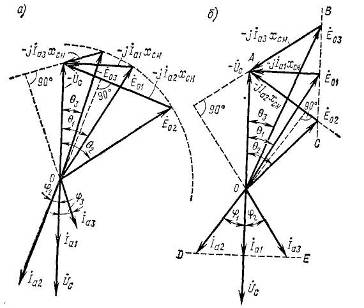
Рис. 1.46–Упрощенные векторные диаграммы синхронного двигателя:
а – при изменении нагрузочного момента на валу; б – при изменении э. д. с. Е0 путем регулирования тока возбуждения
Если при неизменной активной мощности менять ток возбуждения, то будет меняться только реактивная мощность, т.е. величина cosφ. Векторная диаграмма для этого случая изображена на рис. 1.46, б . Если двигатель работает при cosφ = l, то этому режиму соответствует э.д.с. Ė 01 и некоторый угол θ1 . При уменьшении тока возбуждения э.д.с. Ė 0 снижается до Ė 02 . Поскольку активная мощность остается неизменной, из условия Р = Р эм = mU c (E 0 /x сн )sinθ = const получим, что Е 01 sin θ1 = Е 02 sinθ2 Отсюда следует, что конец вектора Ė 0 при изменении тока возбуждения будет перемещаться по прямой ВС, параллельной вектору Ù c и проходящей через конец вектора Ė 01 Из векторной диаграммы (рис. 1.46, б) видно, что угол θ2 будет больше θ1 .
Аналогично строится диаграмма при увеличении тока возбуждения. В этом случае э д с Ė 0 возрастает до величины Ė 03 и угол θ3 становится меньшим θ1 . Вектор – jİа 3 x сн поворачивается вокруг точки А и соответственно ему изменяет направление вектор тока İ a 3 , перпендикулярный вектору – jİ a 3 x сн
При этом из условия равенства активных мощностей имеем: Ia 1 cosφ1 = Iа 2 cosφ2 = Ia 3 cosφ3 , конец вектора тока İа перемещается по прямой DE, перпендикулярной вектору Ù c По диаграмме, приведенной на рис 1.46, б , можно построить U-образные характеристики для двигателя Iа = f (I в ), которые будут иметь такую же форму, как и характеристики для генератора (см рис 1.40), с той лишь разницей, что для двигателя угол сдвига фаз φ принято отсчитывать от вектора напряжения сети Ù c Поэтому при недовоз-буждении ток İа будет отставать от напряжения сети Ù c ,т.е. двигатель будет потреблять из сети реактивную мощность Q, а при перевозбуждении ток будет опережать напряжение сети Ù c ,т.е. двигатель будет отдавать в сеть реактивную мощность
Рабочие характеристики (рис 1.47) Представляют собой зависимости тока Iа , электрической мощности P 1 поступающей в обмотку якоря, к п д η и соsφ от отдаваемой механической мощности Р 2 при U c = const, f c = const и I в = const Поскольку частота вращения двигателя постоянна, зависимость n = f (P 2 ) обычно не приводится; не приводится также и зависимость M = f( P2 ), так как вращающий момент М пропорционален Р2 . Зависимость Р 1 = f (Р 2 ) имеет характер, близкий к линейному
Ток двигателя при холостом ходе является практически реактивным По мере роста нагрузки растет активная составляющая тока, в связи с чем зависимость тока Ia от мощности Р 2 является нелинейной Кривая η = f (P 2 )имеет характер, общий для всех электрических машин. Синхронные двигатели могут работать с соsφ = 1, но обычно их рассчитывают на работу при номинальной нагрузке с опережающим током, при этом cosφном = 0,9 ÷ 0,8 В этом случае улучшается суммарный cosφ сети, от которой питаются синхронные двигатели, так как создаваемая ими опережающая реактивная составляющая тока Iа компенсирует отстающую реактивную составляющую тока асинхронных двигателей. Зависимость cosφ = f (P 2 ) при работе машин с перевозбуждением имеет максимум в области Р 2 > Р ном . При снижении Р 2 величина cosφ уменьшается, а отдаваемая в сеть реактивная мощность возрастает.
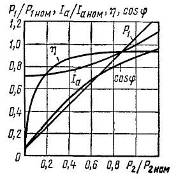
Рис. 1.47–Рабочие характеристики синхронного двигателя
Достоинства и недостатки синхронного двигателя в сравнении с асинхронным. Синхронные двигатели имеют следующие достоинства:
а) возможность работы при cosφ = l; это приводит к улучшению cosφ сети, а также к сокращению размеров самого двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций;
б) меньшую чувствительность к колебаниям напряжения, так как его максимальный момент пропорционален напряжению в первой степени (а не квадрату напряжения);
в) строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатками синхронных двигателей являются:
а) сложность конструкции;
б) сравнительная сложность пуска в ход;
в) трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100 кВт. Однако при более высоких мощностях, когда особенно важно иметь высокий cosφ и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
1. 14 Пуск в ход синхронного двигателя
Метод асинхронного пуска . Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т.е. средний момент за период будет равен нулю. При этих условиях двигатель не сможет прийти во вращение, так как ротор его, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой, выполненной по типу беличьей клетки. Обычно эту клетку изготовляют из латуни с целью увеличения сопротивления стержней При включении трехфазной обмотки якоря в сеть образуется вращающееся магнишое поле, которое, взаимодействуя с током I п в пусковой обмотке (рис. 1.48, а ), создает электромагнитные силы F и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм.
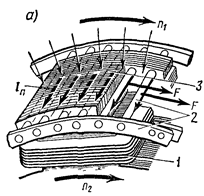
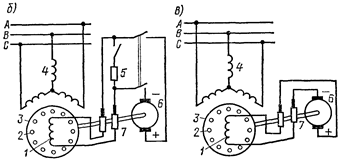
Рис. 1.48–Устройство пусковой обмотки синхронного двигателя (а) исхемы его асинхронного пуска (б, в):1-обмотка возбуждения, 2 – пусковая обмотка, 3 – ротор, 4 – обмотка якоря,5-гасящий резистор, 6 – якорь возбудителя, 7 – кольца и щетки
В настоящее время применяют две основные схемы пуска синхронного двигателя. При схеме, изображенной на рис. 1.48, б , обмотку возбуждения вначале замыкают на гасящий резистор, сопротивление которого r доб в 8–12 раз превышает активное сопротивление r в обмотки возбуждения. После разгона ротора до частоты вращения, близкой к синхронной (при s = 0,05), обмотку возбуждения отключают от гасящего сопротивления и подключают к источнику постоянного тока (возбудителю), вследствие чего ротор втягивается в синхронизм. Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s > 0 в ней индуктируется вращающимся магнитным полем э. д. с.
![]() ,
,
где Фm –амплитуда магнитного потока вращающегося поля; ω в – число витков обмотки возбуждения; f 2 = f 1 s -частота изменения тока в обмотке возбуждения.
В начальный момент пуска при s ≈ 1 из-за большого числа витков ω в обмотки возбуждения э.д.с. Е в может достигать весьма большой величины и вызвать пробой изоляции.
При схеме, изображенной на рис. 1.48, в, обмотка возбуждения постоянно подключена к возбудителю, сопротивление которого по сравнению с сопротивлением r в весьма мало, поэтому эту обмотку в режиме асинхронного пуска можно считать замкнутой накоротко. С уменьшением скольжения до s = 0,3 4–0,4 возбудитель возбуждается и в обмотку возбуждения подается постоянный ток, обеспечивающий при s ≈ 0,05 втягивание ротора в синхронизм.
Различие пусковых схем обусловлено тем, что не во всех случаях может быть применена более простая схема с постоянно подключенной к возбудителю обмоткой возбуждения (рис. 1.48, в), так как она имеет худшие пусковые характеристики, чем более сложная схема, приведенная на рис. 1.48, б. Главной причиной ухудшения пусковых характеристик является возникновение одноосного эффекта – влияния тока, индуктируемого в обмотке возбуждения при пуске, на характеристику пускового момента.
Для анализа этого явления предположим вначале, что в двигателе отсутствует пусковая обмотка, а обмотка возбуждения замкнута накоротко. В результате при асинхронном пуске двигателя в обмотке возбуждения индуктируется э.д.с. с частотой f 2 = f 1 s и по обмотке проходит переменный ток, создающий пульсирующее магнитное поле (обмотка возбуждения в этом случае является однофазной обмоткой переменного тока). Пульсирующее магнитное поле можно разложить на две составляющие: прямое и обратное вращающиеся магнитные поля ротора, которые характеризуются потоками Фпр и Фобр . Частота вращения каждого из этих полей относительно ротора
![]() .
.
Относительно статора прямое поле вращается с частотой
![]() , (1.44)
, (1.44)
где n 2 = n 1 (1 -s) – частота вращения ротора.
Следовательно, оно вращается синхронно с полем статора; образуемый этим полем с током статора электромагнитный момент М пр изменяется в зависимости от скольжения так же, как и в трехфазном асинхронном двигателе (рис. 1.49, кривая 2 ).Обратное поле ротора вращается относительно статора с частотой
![]() , (1.45)
, (1.45)
При частотах вращения ротора n 2 < 0,5n 1 , т.е. при s > 0,5, обратное поле, как видно из формулы (1.45), перемещается относительно статора в сторону, противоположную направлению вращения ротора; при n 2 = 0,5n 1 это поле неподвижно относительно статора; при n 2 > 0,5 (т.е. при s < 0,5) оно перемещается в ту же сторону, что и ротор.
В обмотке статора обратным полем индуктируется э.д.с. с частотой f 1 (1–2s ), для которой обмотка статора является коротко-замкнутой. При этом по обмотке статора протекает соответствующий ток. Взаимодействуя с обратным полем ротора, этот ток создает электромагнитный момент M обр . Так как направление момента зависит от направления вращения поля n р.обр относительно статора, то из формулы (1.45) следует, что он является знакопеременным и изменение его направления происходит при s = 0,5 (рис. 1.49, кривая 3 ).
Таким образом, ток, индуктируемый в обмотке возбуждения при пуске двигателя, создает электромагнитный момент, который при частоте вращения, меньшей 0,5n 1 , является ускоряющим, а при большей частоте вращения–тормозящим.
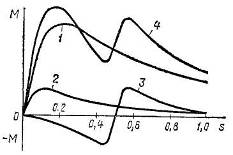
Рис. 1.49 – Зависимость электромагнитного момента от скольжения при асинхронном пуске синхронного двигателя
Особенно резко проявляется действие обратного поля при n ≈ 0,5n 1 .
Наличие пусковой обмотки на роторе существенно уменьшает обратное магнитное поле и величину создаваемого им момента. Однако этот момент, складываясь с асинхронным моментом пусковой обмотки (кривая 1 ), создает в кривой результирующего пускового момента провал при частоте вращения, равной половине синхронной (кривая 4 ). Этот провал будет тем больше, чем больше ток в обмотке возбуждения. Очевидно, что включение сопротивления в цепь обмотки возбуждения (см. рис. 1.48, б) на период пуска уменьшает ток в этой обмотке и улучшает форму кривой пускового момента.
Следует отметить, что если обмотку возбуждения при пуске не отключить от возбудителя, то по якорю возбудителя в период пуска проходит переменный ток; последнее может вызвать искрение щеток. Поэтому такую схему пуска применяют в случае небольшого нагрузочного момента – не более 50% от номинального – при сравнительно небольшой мощности двигателя.
1.15 Регулирование частоты вращения синхронных двигателей
Частота вращения синхронного двигателя n 2 равна частоте вращающегося магнитного поля n 1 = 60f 1 /р , следовательно, ее можно регулировать путем изменения частоты питающего напряжения или числа полюсов 2 р. Регулировать частоту вращения путем изменения числа полюсов в синхронном двигателе нецелесообразно, так как, в отличие от асинхронного, здесь требуется изменять число полюсов как на статоре, так и на роторе, что приводит к значительному усложнению конструкции ротора. Поэтому практически используют лишь изменение частоты питающего напряжения.
К синхронному двигателю применимы все основные положения теории частотного регулирования асинхронного двигателя, в том числе необходимость одновременного изменения как частоты, так и питающего напряжения. Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при очень малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала (см. гл. 2). При больших мощностях такие условия имеют место только в некоторых типах электроприводов, например в электроприводах вентиляторов.
Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма. Особенно сложным является пуск в ход двигателя, когда начальная частота должна составлять доли герца, а затем постепенно повышаться до максимального значения. Для таких электроприводов наиболее пригодным является метод частотного регулирования с самосинхронизацией, при котором двигатель в принципе не может выпасть из синхронизма. Последнее достигается тем, что управление преобразователем частоты осуществляется от системы датчиков положения ротора, вследствие чего напряжение подается на каждую фазу двигателя при углах нагрузки θ, меньших 90°. При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной способностью преобразователя частоты.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями; иногда их называют бесколлекторными двигателями постоянного тока. Однако первое название является более правильным, так как такие двигатели могут получать питание от сети как постоянного, так и переменного тока.
Частотное регулирование без самосинхронизации. Электромагнитный момент синхронного двигателя может быть выражен в виде
![]() . (1.46)
. (1.46)
При частотном регулировании обычно стремятся получить режим работы двигателя с cosφ = 1, когда в обмотке якоря имеют место минимальные потери энергии. Для этого ток якоря Iа должен поддерживаться постоянным и минимальным:
Из (1.47) следует, что при неизменных нагрузочном моменте (М н = М = const) и потоке возбуждения (Фв = const), т.е. токе
![]() . (1.47)
. (1.47)
возбуждения (I в = const), угол θ в процессе регулирования частоты не должен изменяться. Однако при изменении частоты f 1 изменяются э. д. с. Е 0 , угловая скорость ротора ω1 и индуктивное сопротивление хсн (или сопротивления xd и xq при явнополюсном роторе), т.е.
![]() . (1.48)
. (1.48)
Поэтому при частотах питающего напряжения f 1 отличных от номинальной частоты f 1ном , формула электромагнитного момента [см. (1.35)] принимает вид:
![]() ,
,
где с = mE 0 ном f1 ном /(ω1ном х сн ном ) – постоянная.
Из (1.49) следует, что при неизменных значениях нагрузочного момента М н = М и тока якоря 1а = [а мин необходимо выдерживать условие
![]() , (1.50)
, (1.50)
т.е. изменять напряжение U п , подаваемое к электродвигателю от преобразователя частоты, пропорционально изменению частоты f 1 . При соблюдении условия (1.50) все стороны треугольника ОАВ (рис. 1.50, а) будут изменяться пропорционально частоте, а угол θ останется неизменным. При изменении нагрузки необходимо в соответствии с (1.46) изменять поток возбуждения Фв , т.е. ток возбуждения I в .
Вентильный двигатель. При питании вентильного двигателя от сети постоянного тока в преобразователе частоты должны применяться тиристоры с узлами принудительной коммутации. В двигателях малой мощности допустимо применение транзисторов. На рис. 1.51, а показана принципиальная схема питания вентильного двигателя от тиристорного преобразователя частоты.
Преобразователь частоты представляет собой автономный инвертор напряжения, который подключен к источнику постоянного тока и формирует трехфазное напряжение изменяющейся частоты; это напряжение подается на фазы А, В и С обмотки якоря двигателя. К каждой фазе может быть подведено положительное (тиристорами Т1 , Т2 и Т3) и отрицательное (тиристорами Т4, Т5 и Т6) напряжения.
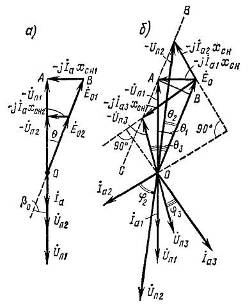
Рис. 1.50– Векторные диаграммы синхронного двигателя,питаемого от преобразователя частоты при постоянном нагрузочном моменте:а – при постоянном угле θ и cosφ=l; б – при изменении угла θ
Если вначале пропускать ток через фазы А и В (открыты тиристоры Т1 и Т5), затем через фазы В и С (открыты тиристоры Т2 и Т6), далее через фазы С и А (открыты тиристоры Т3 и Т4) и т.д. в указанной последовательности, то в машине создается вращающееся магнитное поле. При изменении частоты переключения тиристоров изменяется частота напряжения, подаваемого на фазы обмотки якоря, а следовательно, и частота вращения ротора. Для замыкания реактивной составляющей тока якоря в преобразователе имеются диоды Д1 -Д6, включенные параллельно тиристорам, но и в обратном направлении.
Коммутация тока в тиристорном преобразователе (переключение тока с одной фазы на другую) требует применения специальных коммутирующих узлов, так как тиристор является не полностью управляемым прибором. Для закрытия тиристора, включенного в цепь постоянного тока, необходимо кратковременно подать на него обратное напряжение определенной величины.
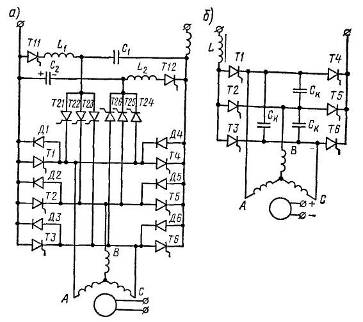
Рис. 1.51–Принципиальные схемы питания вентильного двигателяот тиристорного преобразователя частоты с инвертором напряжения (а)и инвертором тока (б)
В рассматриваемом преобразователе применены два таких узла принудительной (или искусственной) коммутации – по одному для всех тиристоров, присоединяемых соответственно к положительному и отрицательному полюсам источника постоянного тока. Каждый узел состоит из контура L- C и вспомогательных тиристоров.
Закрытие тиристоров T1, Т2 и ТЗ, присоединенных к положительному полюсу, производится контуром L 1 - C 1 . При открытии вспомогательного тиристора Т11 конденсатор С 1 заряжается через индуктивность L 1 до величины двойного напряжения сети и запрает тиристор Т11. Затем открываются вспомогательные тиристоры Т21, Т22 или Т23 и подают на тиристоры T1, T2 или Т3 обратное (положительное) напряжение. При этом соответствующий тиристор запирается, а конденсатор С 1 разряжается через нагрузку.
Аналогично запираются тиристоры Т4, Т5 и Т6. Вначале открывают вспомогательный тиристор Т12 и через индуктивность L 2 заряжают конденсатор С 2 . Затем, открывая вспомогательные тиристоры Т24, Т25 или Т26, присоединяют аноды тиристоров Т4, Т5 или Т6 к отрицательной обкладке конденсатора С 2 .
Напряжение, подаваемое к якорю вентильного двигателя от преобразователя частоты, является, так же как и при частотном регулировании асинхронного двигателя, несинусоидальным. Поэтому, чтобы уменьшить вредные воздействия высших гармоник напряжения, тока и потока, двигатель необходимо снабдить мощной демпферной обмоткой с малыми активным и индуктивным сопротивлениями (см. 1.17). В этом случае высшие гармоники оказывают на синхронный двигатель сравнительно небольшое воздействие. При наличии такой обмотки режимы работы вентильного двигателя можно рассматривать с учетом только первых гармоник тока и напряжения.
Режим работы вентильного двигателя зависит не только от величины тока возбуждения и соотношения между напряжением и частотой, как в обычном синхронном двигателе, регулируемом путем изменения частоты. Большое значение имеют также момент подачи напряжения на фазу двигателя и свойства преобразователя частоты.
В преобразователе частоты, основанном на использовании инвертора напряжения (рис. 1.51, а), величина выходного напряжения почти не зависит от режима работы двигателя. Поэтому регулирование необходимо вести при постоянстве угла θ (см. рис. 1.50, а). Последнее можно осуществить, определяя с помощью какого-либо датчика положение оси полюсов ротора (а следовательно, и направление вектора Ė 0 ) и регулируя подачу управляющих импульсов на тиристоры преобразователя так, чтобы напряжение Ù п подавалось на соответствующие фазы двигателя с некоторым углом опережения β0 ≈ θ (угол регулирования) по отношению к положению вектора Ė 0 для данной фазы. Можно также определять ось результирующего магнитного потока и подавать питание на соответствующую фазу с требуемым углом β0 . Оба эти метода имеют свои преимущества и недостатки, обусловленные в основном особенностями применяемых датчиков и управляющих устройств.
В рассматриваемой схеме питания вентильного двигателя угол регулирования β0 практически полностью определяет угол θ. Если приближенно положить β0 ≈ θ, то при постоянных значениях частоты питающего напряжения и тока возбуждения (т.е. ω1 и э. д. с. Е 0 ) формула (1.35) принимает вид
![]() . (1.51)
. (1.51)
Следовательно, при изменении угла регулирования β0 ≈ θ для поддержания неизменным момента М нужно регулировать величину подводимого к двигателю от преобразователя напряжения U п .
На рис. 1.50, б показано несколько положений векторов Ù п ,
Iа и – jİ a x сн при Е 0 = const и различных значениях угла опережения β0 ≈ θ преобразователя частоты. При угле опережения β01 ≈ θ1 векторы Ù п1 , İа 1 и – jIa l x сн направлены так, что ток İа 1 совпадает по фазе с напряжением Ù п1 и является минимальным; при уменьшении угла β0 до β02 = θ2 напряжение, подводимое к двигателю, необходимо увеличить до U п2 ; при этом ток İа 2 будет отставать от Ù п2 на угол φ2 ; при увеличении угла β0 до β03 = θ3 необходимо уменьшать напряжение, подводимое к двигателю до U п3 , при этом ток İа 3 будет опережать Ù п3 на угол φ3 . Так как величина U п sinθ на векторной диаграмме (рис. 1.50, б) выражается отрезком АВ, то при изменении угла опережения конец вектора напряжения – Ù п перемещается по прямой ВАС, проходящей через точку А и параллельной вектору Ė 0 . Ток якоря Iа при таком регулировании может существенно увеличиться, а максимальный момент двигателя в режиме, когда ток İа отстает от напряжения Ù п преобразователя (например, в положениях İа 2 и Ù п2 ), уменьшится.
В преобразователе частоты, основанном на использовании инвертора тока, большая индуктивность L в цепи постоянного тока (рис. 1.51, б) позволяет считать ток якоря Iа практически неизменным (ток Iа имеет прямоугольную форму). Вследствие этого угол опережения β0 определяет положение вектора тока İа на диаграмме двигателя относительно положения вектора э. д. с. Ė 0 .
Для того чтобы двигатель работал при соsφ = 1, вектор тока İа должен опережать вектор э. д. с. Ė 0 на угол β0 , который в зависимости от нагрузки составляет 30–60°. Пусковой момент вентильного двигателя максимален при β0 = 0, поэтому в электроприводах с тяжелыми условиями пуска сначала регулирование ведут при β0 = 0, а с ростом частоты вращения начинают задавать некоторый угол опережения.
При необходимости питания вентильного двигателя от сети трехфазного тока могут применяться преобразователи частоты с непосредственной связью, т.е. без промежуточного выпрямления (рис. 1.52, а ). Преимуществом таких преобразователей является отсутствие узлов принудительной коммутации, так как тиристоры перестают проводить ток после изменения направления напряжения в соответствующей фазе. Однако достаточно хорошее приближение формы выходного напряжения к синусоиде и четкое прекращение тока (в необходимый момент) может быть получено только в том случае, если источник трехфазного тока имеет частоту, в два-три раза большую, чем выходная частота преобразователя (рис. 1.52, б ).
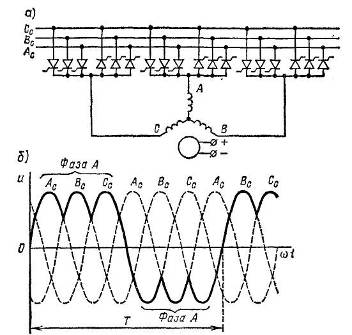
Рис. 1.52–Принципиальная схема питания вентильного двигателяот преобразователя частоты с непосредственной связью (а) иформа кривой выходного напряжения преобразователя (б)
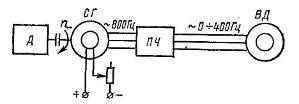
Рис. 1.53–Схема электротрансмиссии автомобиля с вентильными двигателями
В качестве примера рассмотренного способа питания вентильного двигателя на рис. 1.53 приведена принципиальная схема электротрансмиссии мощного автомобиля. Дизель Д вращает вал трехфазного синхронного генератора СГ повышенной частоты (800 Гц) примерно с постоянной частотой. Напряжение генератора СГ, величина которого регулируется изменением тока возбуждения подается на тиристорный преобразователь частоты ПЧ, от которого пониженная частота подается к вентильным тяговым двигателям ВД, каждый из которых вращает ось соответствующего колеса. Частота тока на выходе преобразователя при этом регулируется в пределах от 0 до 400 Гц.
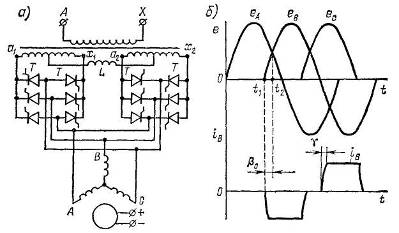
Рис. 1.54–Принципиальная схема питания вентильного двигателяот однофазной сеги (а)и графики изменения э. д. с. и тока в фазе двигателя (б)
На рис 1.54, а приведена схема питания вентильного двигателя от однофазной сети, разработанная для мощных электровозов переменного тока. Однофазный трансформатор электровоза имеет две вторичные обмотки: а 1 – х 1 и а 2 – х 2 ,средние точки которых соединены между собой через дроссель L. К каждой вторичной обмотке подключены шесть тиристоров Т, которые позволяют питать обмотку якоря двигателя трехфазным током, создавая вращающееся магнитное поле. При малой частоте вращения, когда частота выходного напряжения (машинная частота) не превосходит 10 Гц коммутация тиристоров (их запирание) происходит под действием'напряжения сети. При повышенных частотах коммутация осуществляется за счет э.д.с, индуктируемых в фазах якоря двигателя, так как включение тиристора, питающего очередную фазу производится с опережением– в момент времени t 1 (рис. 1.54, б ). Иными словами, включение тиристора произойдет раньше, чем э д с в этой фазе приблизится к значению, при котором происходит естественная коммутация вентилей, включенных в соседние фазы (момент времени t 2 ). Разность э.д.с. по контуру двух фаз, замкнутых накоротко включенными тиристорами одной полярности, обеспечивает закрытие тиристора, питающего ту фазу, в которой индуктируется большая э. д. с. Для нормального закрытия тиристоров практически приходится делать угол опережения β0 равным 30–60°, так как индуктивность фаз довольно велика и ток в тиристорах нарастает и спадает плавно.
Использование рассмотренного способа коммутации тиристоров вентильного двигателя дает возможность обеспечить работу при частоте, равной частоте питающей сети или даже большей ее (при так называемых «сверхсинхронных частотах вращения»). Для того чтобы при повышенных частотах вращения форма кривой тока в фазах двигателя была близка к прямоугольной, между вторичными обмотками трансформатора включают мощный дроссель L, обтекаемый током одного направления. Недостатками рассмотренной схемы питания вентильного двигателя являются сложность системы управления и пониженный к. п. д. (из-за наличия большого дросселя).
Следует отметить, что все типы вентильных двигателей не обладают еще достаточно высокой надежностью из-за сложности преобразователей частоты и их схем управления, которые имеют большое количество вентилей и других элементов, весьма чувствительных к перегрузкам. Тем не менее вентильные двигатели, как и асинхронные двигатели с частотным регулированием, являются весьма перспективными и в будущем можно ожидать широкое применение их в электроприводе. В настоящее время происходит быстрое совершенствование мощных тиристоров, интегральных схем и других полупроводниковых приборов, которое позволит обеспечить надежную работу преобразователей частоты.
1 .16 Синхронный компенсатор
Синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу; при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения соsφ или в режиме стабилизации напряжения.
Обычно электрическая сегь, питающая электроэнергией промышленные предприятия, нагружена током I н отстающим по фазе от напряжения сети U c (рис. 1.55, а ). Это объясняется тем, что от сети получают питание асинхронные двигатели, у которых реактивная составляющая тока довольно велика. Для улучшения cosφ сети синхронный компенсатор должен работать в режиме перевозбуждения. При этом ток возбуждения регулируется так, чтобы ток якоря İа синхронного компенсатора опережал на 90° напряжение сети Ù с (рис. 1.55, а ) и был примерно равен реактивной составляющей İ н.р тока нагрузки İ н . В результате сеть загружается только активным током нагрузки İ с = İ н.а .
При работе в режиме стабилизации напряжения ток возбуждения синхронного компенсатора устанавливается постоянным, причем такой величины, чтобы э. д. с. компенсатора Е 0 была равна номинальному напряжению сети U с.ном (рис. 1.55, б). В сети при этом имеется некоторый ток I н создающий падение напряжения
![]()
![]() ,
,
где r с и х с –активное и индуктивное сопротивления сети; φ–угол сдвига фаз между векторами напряжения и тока сети.
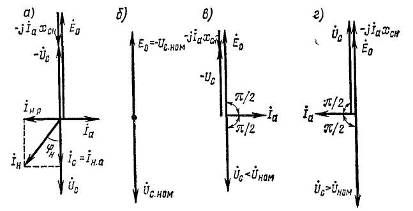
Рис. 1.55 – Векторные диаграммы синхронного компенсатора:
а–в режиме улучшения cos ф сети; б, в, г–врежиме стабилизации напряжения
Если напряжение сети в точке подключения синхронного компенсатора несколько понизится из-за возрастания тока нагрузки I н и станет меньше U с.ном , то синхронный компенсатор начнет забирать из сети реактивный опережающий ток İа (рис. 1.55, в). Это уменьшает падение напряжения в ней на величину ΔU к = Ia x c . При повышении напряжения в сети, когда U c > U с.ном , синхронный компенсатор загружает сеть реактивным отстающим током İа (рис. 1.55, г ), что приводит к увеличению падения напряжения на величину ΔU к = Ia x c . При достаточной мощности синхронного компенсатора колебания напряжения в сети не превышают 0,5 – 1,0%. Недостатком указанного метода стабилизации напряжения является то, что синхронный компенсатор загружает линию реактивным током, увеличивая потери в ней.
1.17 Однофазная синхронная машина
Однофазная синхронная машина может работать в качестве генератора и двигателя. При этом на статоре машины укладывают обмотку якоря (рис. 1.56, а ),занимающую примерно 2 /3 его окружности. Располагать обмотку якоря по всей окружности статора нецелесообразно, так как при этом расход меди увеличится в 1,5 раза, а мощность повысится незначительно – примерно на 15%. Это объясняется тем, что по мере увеличения числа пазов уменьшается обмоточный коэффициент, который для машины с равномерно распределенной обмоткой якоря составляет около 0,64. Однако из-за уменьшения числа пазов, заполненных обмоткой, мощность однофазной машины примерно в 1,4 раза меньше мощности трехфазной машины с одинаковым диаметром статора и при одинаковых потерях мощности в его обмотке.
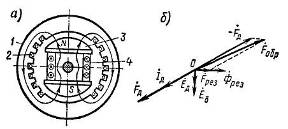
Рис. 1.56 – Схематический разрез однофазной синхронной машины (а) и векторная диаграмма м. д. с. и э. д. с, создаваемых обратным полем (б): 1-статор, 2-обмотка якоря, 3 – ротор, 4 – обмотка возбуждения
При протекании однофазного тока по обмотке якоря возникает как прямое Фпр , так и обратное Фобр магнитные поля. Прямое поле относительно ротора неподвижно; обратное же вращается с угловой скоростью 2ω1 и индуктирует в обмотке возбуждения э. д. с, частота которой в два раза больше частоты э. д. с. в обмотке якоря. Протекающий при этом ток двойной частоты может вызвать искрение на щетках возбудителя и ряд других нежелательных последствий. Для устранения этих явлений на роторе однофазной машины обязательно размещают короткозамкнутую демпферную обмотку типа беличьей клетки. В стержнях демпферной обмотки обратное поле индуктирует э. д. с. двойной частоты, вследствие чего создаваемая этой обмоткой м. д. с. F д будет вращаться с той же частотой и в том же направлении, что и обратное поле, созданное м. д. с. F обр обмотки статора. Векторная диаграмма (рис. 1.56, б ), иллюстрирующая взаимодействие этих м. д. с, сходна с векторной диаграммой трансформатора тока. Так же как и в трансформаторе тока, м. д. с. F д оказывает размагничивающее действие на м. д. с. F обр ,при этом результирующая м. д. с. F рез и создаваемый ею поток Фрез , а также э. д. с. Е д в демпферной обмотке и э. д. с. Е в в обмотке возбуждения резко уменьшаются. Таким образом, при наличии демпферной обмотки обратное поле почти полностью гасится и через обмотку возбуждения переменный ток практически не проходит.
1.18 Понятие о переходных процессах в синхронных машинах
Процессы, возникающие в синхронных машинах при переходных режимах, например при внезапном коротком замыкании или резком изменении нагрузки, весьма сложны, что вызывает значительные
трудности при их точном количественном расчете. Однако поведение синхронной машины при указанных режимах имеет очень большое практическое значение, так как переходные процессы могут вызвать повреждение машины, а следовательно, и значительные убытки, связанные с перерывом энергоснабжения промышленных предприятий. Поэтому необходимо иметь общее представление о физических процессах, возникающих при переходных режимах, и установить хотя бы приближенно величину аварийных токов, имеющих место при коротком замыкании.
Рис. 1.57. Графики изменения токов в обмотках якоря (а), возбуждения (б) и демпферной (в) при коротком замыкании
Внезапное короткое замыкание синхронного генератора. Рассмотрим трехфазное короткое замыкание синхронного генератора, работающего предварительно в режиме холостого хода.
Осциллограмма тока якоря в одной из фаз генератора показана на рис. 1.57. На первый взгляд изменение тока якоря напоминает закон изменения тока трансформатора при коротком замыкании, описываемый формулой (2–98):
![]() ,
,
где i к.п и i к.а – периодическая и апериодическая составляющие тока короткого замыкания; I уст m –амплитуда установившегося тока короткого замыкания; α 0 – начальная фаза напряжения при t = 0, т.е. в момент начала короткого замыкания; r к и L к – сопротивление и индуктивность трансформатора при коротком замыкании.
Однако более подробный анализ показывает, что процесс короткого замыкания в синхронном генераторе значительно сложнее, чем в трансформаторе.
Рис. 1.58 – График изменения тока в обмотке якоря при коротком замыкании
При коротком замыкании генератора с течением времени постепенно уменьшается амплитуда периодической составляющей Iк , п тока генератора (рис. 1.58) и в конце концов она становится равной амплитуде установившегося тока короткого замыкания:
![]() .
.
В первом полупериоде амплитуда периодической составляющей в 5–8 раз превышает величину I кm . Это происходит из-за того, что в начальный момент процесса короткого замыкания э. д. с. синхронного генератора близка к э. д. с. холостого хода Е 0 и только через 0,6–1,5 с становится равной
![]() .
.
Быстрому уменьшению э. д. с. Е и потока Фрез препятствует появление переходного тока в обмотке возбуждения (рис. 1.57, б), который возникает из-за того, что в обмотке возбуждения индуктируется э. д. с.
![]() . (1.52)
. (1.52)
Переходный ток в обмотке возбуждения имеет максимум в начальный период короткого замыкания и постепенно затухает, уменьшаясь до установившегося значения тока, предшествовавшего короткому замыканию. В соответствии с уменьшением тока возбуждения снижаются результирующий поток, э. д. с. генератора и амплитуда периодической составляющей тока короткого замыкания. Наибольшее значение этой амплитуды
![]() . (1.53)
. (1.53)
где x' d –продольное переходное индуктивное сопротивление обмотки якоря.
Поскольку амплитуда тока постепенно затухает, приближаясь к установившемуся значению тока короткого замыкания I кm , периодическая составляющая тока короткого замыкания может быть представлена в виде
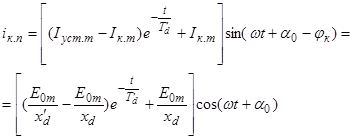 , (1.54)
, (1.54)
так как индуктивное сопротивление синхронной машины значительно больше активного и φк ≈ arctg (х к /r к ) ≈ π/2.
Переходная постоянная времени T' d обусловлена не только параметрами обмотки якоря, но и главным образом параметрами обмотки возбуждения и составляет 0,4 – 3,0 с.
Обычно величина продольного переходного индуктивного сопротивления в относительных единицах x' d* = 0,2 ÷ 0,5.
Еще большей бывает амплитуда тока короткого замыкания, если машина имеет успокоительную (демпферную) обмотку, в которой также возникает переходный ток, замедляющий уменьшение результирующего потока. При наличии успокоительной обмотки
![]() , (1.55)
, (1.55)
где x" d –сверхпереходное индуктивное сопротивление по продольной оси. Обычно x" d* = 0,12 ÷ 0,35.
Затухание тока якоря, соответствующее затуханию переходного тока в демпферной обмотке, определяется сверхпереходной постоянной времени T"d = 0,03-=-0,15 с, которая зависит в основном от параметров демпферной (успокоительной) обмотки.
С учетом сказанного периодическая составляющая тока короткого замыкания принимает вид
 . (1.56)
. (1.56)
Поскольку э. д. с. в фазах обмотки статора сдвинуты по времени, начальный угол α 0 для них различен, а следовательно, различны и токи фаз в переходном процессе.
Апериодические составляющие тока якоря создают неподвижное в пространстве магнитное поле, которое пересекает вращающийся ротор. Вследствие этого в обмотках ротора возникают периодические э. д. с. и токи. Так как по продольной и поперечной осям ротор несимметричен (из-за разных величин воздушного зазора в явнополюсных машинах; из-за того, что по продольной оси имеется обмотка возбуждения, а успокоительные обмотки по этим осям могут также иметь различие), то в апериодическом токе якоря i ка появляется переменная составляющая двойной частоты. При этом
 , (1.57)
, (1.57)
где x" q – поперечное сверхпереходное индуктивное сопротивление обмотки якоря; Та = (х"d + х"q )/ (ωr а ) – постоянная времени апериодического тока якоря.
При наличии успокоительной обмотки x" q обычно мало отличается от x" d и тогда
![]() . (1.58)
. (1.58)
Полный ток короткого замыкания
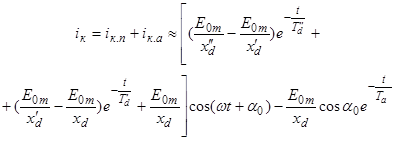 . (1.59)
. (1.59)
Значение тока короткого замыкания будет максимальным в той фазе, где α0 = 0, примерно через полупериод после начала короткого замыкания (см. рис. 1.58). Эту величину называют ударным током. Если в формуле (1.59) пренебречь затуханием тока, то
![]() .
.
Поскольку постоянные времени T" d , T' d и Т а малы, некоторое затухание все же происходит.
По ГОСТу значение ударного тока определяется по формуле
![]() ,
,
где коэффициентами 1,8 и 1,05 учитывается соответственно затухание и возможность работы при повышенном напряжении.
Величина ударного тока не должна превышать амплитуду номинального тока якоря более чем в 15 раз. Так как значения x" d и x' d сравнительно малы, то для ограничения величины ударного тока в цепь якоря иногда приходится ставить специальный реактор.
При коротком замыкании синхронного генератора возникает также знакопеременный момент на валу ротора, который образуется в результате взаимодействия неизменного по направлению магнитного поля, создаваемого апериодической составляющей тока якоря, с м.д. с. возбуждения. В наиболее неблагоприятных случаях мгновенные значения этого момента достигают 10-кратной величины по сравнению с номинальным значением, что необходимо учитывать при механических расчетах деталей машины и ее крепления к фундаменту.
Гашение магнитного поля. При коротких замыканиях во внешней цепи срабатывает релейная защита, которая отключает синхронный генератор от присоединенной к нему нагрузки или от сети. Однако при внутренних коротких замыканиях в генераторе отключение его от внешней цепи не ликвидирует режим короткого замыкания, так как в обмотке якоря индуктируется э.д.с. и по ней продолжает протекать большой ток. Для устранения режима короткого замыкания в этом случае требуется резко уменьшить магнитный поток машины, для чего следует прекратить протекание тока по ее обмотке возбуждения. Операции, необходимые для прекращения протекания тока по обмотке возбуждения синхронной машины при аварийных режимах, называют гашением магнитного поля.
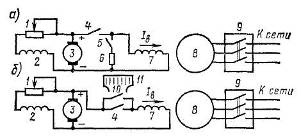
Рис. 1.59 – Схемы возбуждения синхронных генераторов с устройствами гашения поля:
а – с гасящим резистором; б – с автоматом гашения поля и дугогасительной решеткой:
1-регулировочный реостат, 2 – обмотка возбуждения возбудителя,
3-якорь возбудителя, 4, 5, 10 – контакты автомата гашения поля,
6 – гасящий резистор, 7-обмотка возбуждения генератора,
8 – якорь генератора, 9~~выключатель в цепи якоря,
11 – дугогасительная решетка автомата гашения поля
Гашение магнитного поля в принципе возможно путем быстрого размыкания цепи обмотки возбуждения с помощью соответствующего контакта автоматического выключателя (автомата гашения поля). Однако при этом в обмотке возбуждения индуктируется э.д. с. самоиндукции е в = – L в di в /dt. Так как обмотка возбуждения имеет значительную индуктивность L в , то э. д. с. е в может создавать большие перенапряжения, опасные для изоляции обмотки.
По этой причине приходится применять способы гашения магнитного поля, обеспечивающие уменьшение тока возбуждения с некоторой ограниченной скоростью, при которой не возникают чрезмерные перенапряжения.
В настоящее время применяют две схемы гашения поля. В одной из них (рис. 1.59, а ) обмотка возбуждения отключается автоматом гашения поля от возбудителя и замыкается на гасящий резистор, сопротивление которого в 4–5 раз больше сопротивления обмотки возбуждения. При такой величине сопротивления резистора ток короткого замыкания не создает в генераторе значительных внутренних повреждений, а возникающие перенапряжения находятся в допустимых пределах. Гасящий резистор должен быть рассчитан на длительный ток, равный 0,2 I в.ном для турбогенераторов и 0,05 I в.ном для гидрогенераторов. В другой схеме (рис. 1.59, б )скорость уменьшения тока возбуждения ограничивается удлинением времени горения дуги в автомате гашения поля, который размыкает цепь обмотки возбуждения. Этот автомат имеет кроме главных контактов 4 специальные дугогасительные контакты 10, при размыкании которых возникающая дуга выдувается на дугога-сительную решетку и гасится в ней. Соответствующим выбором конструкции дугогасительной камеры удается получить умеренную скорость уменьшения тока. При использовании указанных схем гашения поля требуется усиливать изоляцию обмотки возбуждения, на которую в нормальных условиях подается напряжение порядка 50–400 В.
Гашение поля мало сказывается на характере переходного процесса нарастания тока якоря при коротких замыканиях, так как этот ток достигает максимального значения I уд примерно через полпериода (при частоте 50Гц через 0,01 с), а за это время защита не успевает сработать. Оно лишь уменьшает время, в течение которого по обмотке якоря проходит ток короткого замыкания и, следовательно, снижает вероятность повреждения машины этим током.
Резкие изменения нагрузки. При резких изменениях нагрузки синхронной машины, работающей параллельно с сетью, возникают колебания ротора около установившегося значения угла θ, называемые качаниями. Допустим, что машина работает при некоторой нагрузке и развивает электромагнитный момент М 1 = М вн1 , соответствующий углу θ1 (рис. 1.60). Если резко увеличить внешний момент, приложенный к валу ротора, до величины М вн2 , при которой возрастает отдаваемая машиной электрическая (в генераторе) или механическая (в двигателе) мощность, то угол θ будет постепенно увеличиваться до величины θ2 , соответствующей новому значению электромагнитного момента М 2 = М вн2 . Однако из-за инерции ротора угол θ, увеличиваясь, достигнет значения θ3 > θ2 , а затем под действием синхронизирующего момента начнет уменьшаться до величины θ4 < θ2 . В результате возникают колебания угла θ вокруг установившегося значения θ2 , которые сопровождаются колебаниями угловой скорости вращения ротора (качаниями). Опасность таких качаний заключается в том, что из-за инерции ротора угол θ может существенно превзойти 90°, и машина выпадет из синхронизма.
Частота собственных колебаний синхронных машин невелика (0,5–2,0 Гц), что объясняется большим моментом инерции ротора. Так как изменения угла θ сопровождаются изменениями мощности машины и тока якоря, на наличие колебаний в машине указывают колебания стрелок приборов (амперметра и вольтметра), включенных в цепь якоря. Собственные колебания в синхронных машинах наблюдаются не только при резких изменениях нагрузок, но и в стационарных режимах, так как у машин, работающих параллельно с сетью, всегда имеются небольшие возмущения. Особенно часто такие колебания возникают при холостом ходе, когда на валу нет внешнего момента.
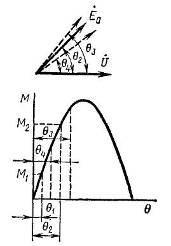
Рис. 1.60 – Угловая характеристика синхронного генератора при качаниях ротора
Уменьшения амплитуды качаний и ускорения их затухания достигают применением на роторе короткозамкнутой обмотки, называемой демпферной или успокоительной. Успокоительное действие демпферной обмотки при качаниях объясняется тем, что в ее стержнях при изменении частоты вращения ротора индуктируется э. д. с. и по ним проходит ток, что сопровождается потерей энергии. Эта обмотка получила свое название потому, что ее действие подобно действию механического демпфера, потери на трение в котором успокаивают колебания механизма (например, сельсина).
Колебания ротора синхронной машины могут быть вынужденными, если на него действует периодически изменяющийся внешний момент. Такие колебания образуются в синхронных генераторах, приводимых во вращение от поршневых машин, например от двигателей внутреннего сгорания, а также в синхронных двигателях, служащих для привода поршневых компрессоров. Поэтому для уменьшения неравномерности вращающего момента двигатели внутреннего сгорания, предназначенные для вращения синхронных генераторов, и поршневые компрессоры часто снабжают маховиками. Генераторы и электродвигатели должны в этом случае иметь достаточно мощную демпферную обмотку.
1.19 Несимметричные режимы работы синхронных генераторов
Работа генератора при несимметричной нагрузке. Наличие однофазных нагрузок (осветительной сети, тяговых трансформаторов электрифицированных железных дорог и т.п.) вызывает несимметрию фазных токов синхронных генераторов. Анализ несимметричных режимов, как и для трехфазных трансформаторов, производится методом симметричных составляющих, при котором трехфазная несимметричная система токов IА , IB и IC разлагается на системы токов прямой, обратной и нулевой последовательностей.
Система токов прямой последовательности İ A1 , İ B1 , İ C1 создает в трехфазной синхронной машине м.д.с. якоря, вращающуюся синхронно с ротором, т.е. неподвижную относительно обмоток ротора. Этот режим подробно рассмотрен в предшествующих параграфах настоящей главы. Индуктивное сопротивление фазы для токов прямой последовательности х пр =х сн .
Система токов обратной последовательности İА 2 , İВ 2 , İC2 создает м.д.с. якоря, вращающуюся в сторону, противоположную вращению ротора, так как имеет место чередование максимумов тока в фазах, обратное по отношению к токам прямой последовательности. Следовательно, магнитное поле токов обратной последовательности пересекает обмотки ротора с двойной частотой и индуктирует в обмотке возбуждения и демпферной обмотке э. д. с, имеющую в два раза большую частоту, чем э. д. с. обмотки якоря. Наличие э.д. с. и токов двойной частоты в обмотках ротора заставляет при расчете токов обратной последовательности пользоваться сверхпереходными (или переходными) индуктивными сопротивлениями. Другими словами, для потоков обратной последовательности короткозамкнутая демпферная клетка играет ту же роль, что и короткозамкнутая обмотка ротора асинхронной машины по отношению к вращающемуся потоку.
Поток обратной последовательности равномерно пересекает то продольную, то поперечную ось ротора. Вследствие этого среднее значение индуктивного сопротивления машины для токов обратной последовательности можно принять равным
![]() . (1.60)
. (1.60)
Если демпферная обмотка расположена по всей окружности якоря, то можно считать, что
![]() . (1.61)
. (1.61)
Сопротивления для токов обратной последовательности можно получить экспериментально, если включить синхронную машину в сеть и вращать ротор с синхронной частотой против направления вращения поля.
Токи двойной частоты, возникающие в демпферных обмотках и массивном роторе, вызывают дополнительные потери, из-за которых может возникнуть опасный нагрев ротора и снижение к. п. д. машины. Увеличение сечения стержней демпферной обмотки с целью снижения активного сопротивления и потерь не всегда дает положительный эффект, так как при двойной частоте сильно сказывается эффект вытеснения тока. Взаимодействие м. д. с. возбуждения ротора и потока обратной последовательности статора создает знакопеременный колебательный момент, вызывающий вибрацию машины и шум.
Система токов нулевой последовательности IА 0 , IB 0 , IC 0 создает во всех трех фазах м. д. с, совпадающие по времени, так как
İA 0 = İВ 0 = İC 0 (1.62)
На рис. 1.61 показаны магнитные поля, образуемые этими токами в каждой из фаз якоря для простейшего случая сосредоточенной обмотки. Легко заметить, что для основной гармоники магнитный поток в воздушном зазоре от токов нулевой последовательности равен нулю. Вследствие этого токи нулевой последовательности могут создавать только потоки рассеяния Фσ0 и пульсирующие потоки гармоник, кратных трем.
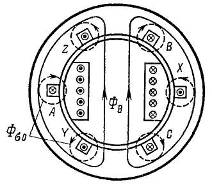
Рис. 1.61 – Потоки рассеяния, образуемые токами нулевой последовательности в обмотках якоря
При диаметральной обмотке якоря потоки рассеяния токов нулевой последовательности замыкаются так же, как потоки рассеяния для токов прямой последовательности, а поэтому приблизительно равны и соответствующие индуктивные сопротивления х 0 = xsa . При укорочении шага обмотки индуктивное сопротивление уменьшается и достигает минимума при шаге обмотки, равном 2 /3 полюсного деления, так как в этом случае во всех пазах проводники нижнего и верхнего слоев принадлежат разным фазам.
Следовательно, при y = (2/3)τ полный ток нулевой последовательности каждого из пазов будет равен нулю, а индуктивное сопротивление будет определяться потоком лобовых частей. При рекомендуемом для синхронных машин шаге y = 0,8τ индуктивное сопротивление х 0 уменьшается почти в три раза по сравнению с его значением при диаметральной обмотке. Таким образом, обычно 0,3 xsa < х 0 < xsa .
Экспериментально величину х 0 можно определить, если включить все фазы обмотки якоря последовательно и присоединить их к источнику однофазного переменного тока. Обмотку возбуждения при этом нужно замкнуть накоротко, а ротор привести во вращение с номинальной частотой. В этом опыте U = 3I 0 x 0 , откуда x 0 = U/ (3 I 0 ).Наличие короткозамкнутой обмотки возбуждения на роторе уменьшает дифференциальный поток рассеяния, а вращение ротора выравнивает фазные сопротивления, которые при неподвижном роторе оказались бы различными из-за различия в положении проводников отдельных фаз относительно оси обмотки возбуждения. Если на роторе имеется мощная демпферная обмотка, то обмотка возбуждения оказывает незначительное влияние на величину х 0 , т.е. ее можно не замыкать накоротко л не приводить во вращение.
Несимметричные установившиеся короткие замыкания. Простейшим примером несимметричной нагрузки является однофазное короткое замыкание. Этот режим помимо методического имеет и большое практическое значение, так как его результаты можно использовать при определении токов аварийного короткого замыкания.
При однофазном коротком замыкании (рис. 1.62, а )
![]() ;
; ![]() и
и ![]() .
.
Из условия (2–108) получим для этого режима
![]() . (1.63)
. (1.63)
Следовательно, в данном случае во всех трех фазах возникают токи прямой, обратной и нулевой последовательностей, хотя и имеют место условия İВ 1 + İВ 2 + İВ 0 = İВ = 0 и İС 1 + İС 2 + İС о =İС = 0.
Вращающийся магнитный поток возбуждения индуктирует во всех фазах э.д.с. только прямой последовательности Ė 1 = Ė 0 . Пренебрегая активными сопротивлениями, для фазы А – X можно написать
![]() (1.64)
(1.64)
или с учетом (1.63)
EA = jiA (xnp + x2 + x0 )/3 ,(1.65)
откуда установившийся ток однофазного короткого замыкания
![]() . (1.66)
. (1.66)
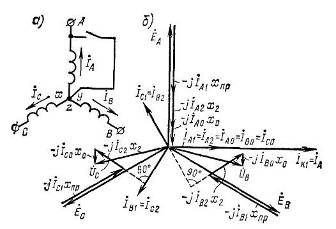
Рис. 1.62 – Схема однофазного короткого замыкания (а) и векторная диаграмма токов и напряжений при этом режиме (б)
Сравнивая (1.66) с величиной установившегося тока трехфазного короткого замыкания I кз = Е 0 /х сн , получаем, что I к1 > I кз , так как x пр = x сн ; х 2 < х сн и х 0 < х сн . Величину напряжений для фаз В –Y и С –Z определим из уравнений:
UB = EB – jIBl xnv – jiBi x2 – jIB 0 x0 ; (1.67)
Uc = Ec –jicl xnv –jiC2 x2 –jiC0 x0 . (1.68)
На рис. 1.62, б показана векторная диаграмма, построенная по (1.64), (1.67) и (1.68) для всех трех фаз. Построение начинается с вектора ĖА и отстающего от него по фазе на 90° вектора İА . Векторы İ A 1 , İ A 2 и İА 0 совпадают с вектором İ A по фазе и составляют ⅓ от него по величине. Остальные векторы симметричных составляющих соответственно ориентируются по току в фазе А – X. Дальнейшие построения производятся обычным порядком с учетом того, что векторы фазных э. д. с. сдвинуты относительно друг друга на 120°.
Двухфазное короткое замыкание, например, фаз А – X и В –Y (рис. 1.63, а ) характеризуется следующими соотношениями: İС = 0; Ù AB = 0; Ù A =Ù B в силу симметрии схемы и İА = – İВ , так как при положительном направлении тока в фазе А – X (например, от конца фазы к началу), в фазе В –Y ток будет иметь отрицательное направление. Токи нулевой последовательности в данном режиме равны нулю, так как
![]() . (1.69)
. (1.69)
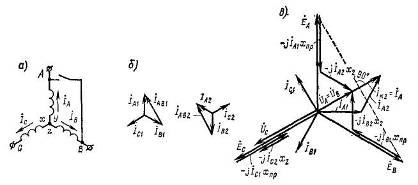
Рис. 1.63 – Схема двухфазного короткого замыкания (а) и векторные диаграммы токов и напряжений при этом режиме (б, в)
Так как в фазе С –Z сумма токов прямой и обратной последовательностей равна нулю
![]() . (1.70)
. (1.70)
и для нее İС 1 = – İС 2 , то, очевидно, во всех фазах токи прямой и обратной последовательностей будут равны по модулю (рис. 1.63, б ). Для определения установившегося тока двухфазного короткого замыкания İ к2 будем исходить из фазных напряжений:
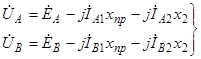 (1.71)
(1.71)
При этом линейное напряжение
Из векторной диаграммы (рис. 1.63, б) следует, что
![]() . (1.72)
. (1.72)
Откуда
![]() . (1.73)
. (1.73)
Следовательно,
![]() . (1.74)
. (1.74)
Так как İА –İВ = 2İА = (İА 1 –İВ 1 ) +(İА 2 –İВ 2 ) = 2İАВ1 получаем
![]() . (1.75)
. (1.75)
Векторная диаграмма напряжений при двухфазном коротком замыкании изображена на рис. 1.63, в .
Внезапное (аварийное) короткое замыкание. При одно- и двухфазном внезапных коротких замыканиях ток короткого замыкания больше, чем при трехфазном аварийном коротком замыкании, в соответствии с тем, что при установившемся режиме ток при двух- и однофазном коротких замыканиях больше, чем при трехфазном. В случае аварийных несимметричных коротких замыканий возникают, так же как при трехфазном коротком замыкании, апериодическая и периодическая составляющие тока. Начальное действующее значение периодической составляющей тока I' уст.макс можно определять по формулам (1.66) или (1.75), подставляя вместо х пр величину х"d или x' d . При этом индуктивные сопротивления х2 и х 0 остаются практически одинаковыми как для установившихся, так и для переходных режимов. В остальном определение тока короткого замыкания при несимметричных режимах производится так же, как и при трехфазном коротком замыкании.
1.20 Синхронные машины с постоянными магнитами
Машины с постоянными магнитами позволяют уменьшить потери в машине, а также (при полюсах, расположенных на роторе) избавиться от подвода тока через контактные кольца к обмотке возбуждения. Недостатком постоянных магнитов с высокой коэрцитивной силой является их чрезвычайно высокая стоимость. Однако в настоящее время появились первые образцы электрических машин с дешевыми ферритно-бариевыми магнитами. Типичная кривая намагничивания ферритно-бариевого магнита изображена на рис. 1.64. Остаточная индукция такого магнита В г ≈ 0,35 Т, коэрцитивная сила H с ≈ 250 кА/м. Но чтобы получить хорошее использование материалов в машине и пре-емлемые габариты машины, индукция в воздушном зазоре должна составлять 0,5–1,0Т, как это обычно имеет место в машинах с электромагнитным возбуждением.
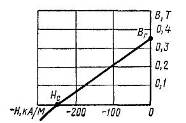
Рис. 1.64 – Кривая намагничивания феррито-бариевого магнита
Для повышения индукции в воздушном зазоре и зубцах машины применяют различные концентраторы магнитного потока. Принцип устройства концентратора состоит в том, что площадь поперечного сечения магнита берется больше площади воздушного зазора (рис. 1.65, а). При этом индукция в воздушном зазоре определяется равенством
![]() , (1.76)
, (1.76)
где S м – площадь сечения воздушного зазора для постоянного магнита; S σ –площадь сечения воздушного зазора, через которое замыкается магнитный поток машины.
Выполняя машину с отношением S м /Sσ ≈ 2 ÷ 3, получают желаемую индукцию в воздушном зазоре.
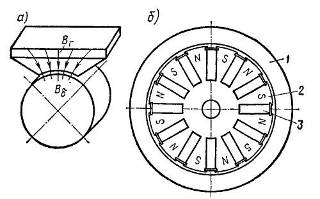
Рис. 1.65 – Принцип устройства концентратора магнитного потока (а) и конструктивная схема генератора с постоянными магнитами (б): 1-статор, 2 – ротор, 3 – постоянные магниты
Особенно выгодно применение машин с концентраторами магнитного потока при высоких частотах вращения и повышенной частоте тока. На рис. 1.65, б изображена конструктивная схема две-надцатиполюсного генератора мощностью 20 кВт на частоту 300 Гц при частоте вращения 3000 об/мин.
Недостаток такого генератора заключается в том, что невозможно регулировать его выходное напряжение. Однако изменение напряжения под нагрузкой не очень велико, так как отношение короткого замыкания весьма значительно: k о.к.з ≈ 3,5.
Можно ожидать, что мощные синхронные машины с постоянными магнитами в ближайшие годы найдут широкое применение в комбинации с полупроводниковыми преобразователями не только в качестве генераторов, но и двигателей.
2. Машины постоянного тока
2.1 Принцип действия машины постоянного тока
Машина постоянного тока (рис. 2.1) имеет обмотку возбуждения, расположенную на явно выраженных полюсах статора. По обмотке возбуждения проходит постоянный ток I в , который создает магнитное поле возбуждения Фв . На роторе размещена двухслойная обмотка, в которой при вращении ротора индуктируется э. д.с. Таким образом, ротор машины постоянного тока является якорем, а конструкция машины сходна с конструкцией обращенной синхронной машины.
При заданном направлении вращения якоря направление э. д. с, индуктируемой в проводниках, зависит только от того, под каким полюсом находится проводник. Поэтому во всех проводниках, расположенных под одним полюсом, направление э.д.с. одинаковое и сохраняется таким независимо от частоты вращения.
Другими словами, картина, изображающая направление э.д.с. на рис. 2.1, неподвижна во времени: в проводниках, расположенных выше горизонтальной оси симметрии, которая разделяет полюсы (геометрическая нейтраль), э.д.с. всегда направлена в одну сторону; в проводниках, лежащих ниже геометрической нейтрали, э.д.с. направлена в противоположную сторону.
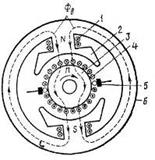
Рис. 2.1 – Электромагнитная схема машины постоянного тока: 1-обмотка возбуждения, 2 – главные полюсы, 3 – якорь, 4-обмотка якоря, 5-щетки, 6 – корпус (станина)
При вращении якоря проводники обмотки перемещаются от одного полюса к другому; э.д.с, индуктируемая в них, меняет знак, т.е. в каждом проводнике наводится переменная э.д.с. Однако количество проводников, находящихся под каждым полюсом, остается неизменным. При этом суммарная э.д.с, индуктируемая в проводниках, которые находятся под одним полюсом, также неизменна по направлению и приблизительно постоянна по величине. Эта э.д.с. снимается с обмотки якоря при помощи скользящего контакта, включенного между обмоткой и внешней цепью.
На рис. 2.2 показана эквивалентная электрическая схема обмотки якоря двухполюсной машины постоянного тока. Обмотка якоря выполняется замкнутой, симметричной. При отсутствии внешней нагрузки ток по обмотке не проходит, так как э.д.с. Е, индуктируемые в различных частях обмотки, взаимно компенсируются.
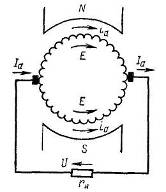
Рис. 2.2 – Эквивалентная электрическая схема обмотки якоря двухполюсной машины постоянного тока
Если расположить щетки, осуществляющие скользящий контакт с обмоткой якоря, на геометрической нейтрали, то при отсутствии внешней нагрузки к щеткам будет приложено напряжение U, равное э. д. с. Е, индуктированной в каждой из половин обмотки. Это напряжение практически неизменно, хотя и имеет некоторую переменную составляющую, обусловленную изменением положения проводников в пространстве. При большом количестве проводников пульсации напряжения весьма незначительны.
Если к щеткам подключить сопротивление нагрузки r н то через обмотку якоря будет проходить постоянный ток Iа , направление которого определяется направлением э.д.с. Е. В обмотке якоря ток Iа разветвляется и проходит в данном случае по двум параллельным ветвям (токи ia ).
Для обеспечения надежного токосъема щетки скользят не по проводникам обмотки якоря (как это было на заре электромашиностроения), а по коллектору, который выполнен в виде цилиндра, набираемого из медных пластин, изолированных друг от друга. К каждой паре соседних коллекторных пластин присоединяют часть обмотки якоря, состоящую из одного или нескольких витков. Эту часть называют секцией обмотки якоря.
Если машина работает в генераторном режиме, то коллектор вместе со скользящими по его поверхности щетками является механическим выпрямителем. В двигательном режиме, когда к якорю подводится питание от источника постоянного тока и он преобразует электрическую энергию в механическую, коллектор со щетками можно рассматривать как преобразователь частоты, связывающий сеть постоянного тока с обмоткой, по проводникам которой проходит переменный ток.
Таким образом, главной особенностью машины постоянного тока является наличие коллектора и скользящего контакта между обмоткой якоря и внешней электрической цепью.
2.2 Устройство машины постоянного тока
Машина постоянного тока (рис. 2.3) по конструктивному исполнению подобна обращенной синхронной машине, у которой обмотка якоря расположена на роторе, а обмотка возбуждения – на статоре. Основное отличие заключается в том, что машина постоянного тока имеет на якоре коллектор, а на статоре, помимо главных полюсов с обмоткой возбуждения–добавочные полюсы, которые служат для уменьшения искрения под щетками.
Статор. На статоре расположены главные полюсы с катушками обмотки возбуждения и добавочные полюсы (на рис. 2.3 не показаны) с соответствующими катушками, служащие для обеспечения безыскровой работы щеток. Полюсы крепят болтами к стальному корпусу (станине), который является частью магнитной цепи машины. Главные полюсы (рис. 2.4) выполняют шихтованными (из стальных штампованных листов), а добавочные – массивными или также шихтованными. Стальные листы спрессовывают под давлением и скрепляют заклепками, головки которых утоплены в нажимные щеки, установленные по краям каждого полюса. Шихтованными требуется изготовлять только наконечники главных полюсов, так как при вращении зубчатого якоря из-за пульсации магнитного потока в воздушном зазоре в них возникают вихревые токи и потери мощности. Однако по технологическим соображениям чаще всего выполняют шихтованным весь полюс. Полюсы крепят к станине болтами; нарезку резьбы для болтов выполняют непосредственно в шихтованном сердечнике полюса (рис. 2.4, а ) либо в массивных стальных стержнях (рис. 2.4, б ), которые вставляют в выштампованные отверстия в полюсах.
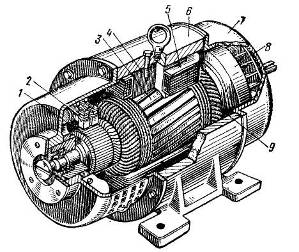
Рис. 2.3 – Устройство электрической машины постоянного тока:
1 – коллектор, 2 – щетки, 3 – сердечник якоря, 4 – главный полюс,
5 – катушка обмотки возбуждения, 6 – корпус (станина), 7 – подшипниковый щит,
8 – вентилятор, 9 – обмотка якоря
Катушки главных и добавочных полюсов изготовляют из изолированного медного провода круглого или прямоугольного сечения.
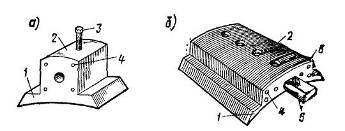
Рис. 2.4 – Главные полюсы электрической машины постоянного тока:
1 – полюсный наконечник, 2 – сердечник полюса, 3 – установочный болт,
4 – заклепки, 5 – установочный стержень, 6 – нажимные щеки
Катушки машин малой мощности выполняют из тонкой проволоки; последовательные катушки обмоток возбуждения и добавочных полюсов изготовляют из полосовой меди (рис. 2.5). Расположенную на полюсе обмотку иногда разбивают на несколько катушек (секций) для лучшего ее охлаждения. При секционном выполнении катушек между отдельными секциями устанавливают дистанционные шайбы из изоляционного материала, посредством которых образуются вентиляционные каналы.
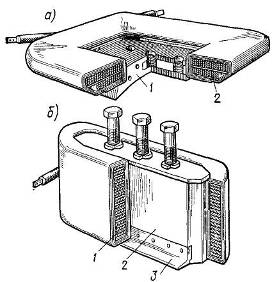
Рис. 2.5 – Катушки полюсов:
а – главных: 1 – главный полюс, 2 – катушка обмотки возбуждения;
б – добавочных: 1 – обмотка добавочных полюсов, 2 – добавочный полюс, 3 – опорный угольник
Якорь. Сердечник якоря (рис. 2.6, а ), так же как в синхронной машине, собирают из изолированных листов электротехнической стали (рис. 2.6, б ). Обмотку якоря изготавливают из провода круглого или прямоугольного сечения; обычно она состоит из отдельных, заранее намотанных якорных катушек (рис. 2.7, а ), которые обматывают изоляционными лентами и укладывают в пазы сердечника якоря. Обмотку выполняют двухслойной; в каждом пазу размещают две стороны различных якорных катушек – одну поверх другой (рис. 2.7, б ) Каждая якорная катушка включает в себя несколько секций, концы которых припаивают к соответствующим коллекторным пластинам; секции могут быть одно- и многовитковыми.
Коллектор. Обычно коллектор выполняют в виде цилиндра (рис. 2.8), собранного из клинообразных пластин твердотянутой меди; между пластинами располагают изоляционные прокладки из миканита Узкие края коллекторных пластин имеют форму «ласточкина хвоста»; после сборки коллектора эти края зажимают между корпусом и нажимным фланцем (рис. 2.8, а ) и изолируют от этих деталей манжетами из миканита Секции обмотки якоря впаивают в прорези, имеющиеся в выступающей части коллекторных пластин. В машинах малой и средней мощности широко применяют коллекторы, в которых медные пластины и миканитовые прокладки запрессованы в пластмассу (рис. 2.8, б ). Поверхность собранного коллектора обтачивают на токарном станке и тщательно шлифуют. Чтобы миканитовые прокладки при срабатывании коллектора не выступали над пластинами и не вызывали вибрации щеток, их профрезеровывают на 0,8–1,5 мм ниже поверхности коллектора
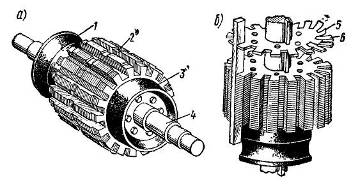
Рис. 2.6 – Сердечник якоря (а) и процесс его сборки (б):
1, 3 – нажитые шайбы (обмоткодержатели), 2 – выточки для наложения бандажа,
4 – место для запрессовки коллектора, 5– изоляционная пленка, 6 – стальной лист
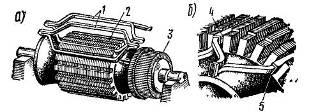
Рис. 2.7 – Наложение обмотки на сердечник якоря (а) и
расположение якорных катушек в пазах (б):
1 – якорные катушки, 2 – сердечник якоря, 3 – коллектор,
4, 5 – верхняя и нижняя стороны якорной катушки
Щеточный аппарат. По цилиндрической части коллектора скользят щетки, установленные в щеткодержателях. Щетки представляют собой прямоугольные бруски из композиции, выполненной на основе графита. Они предназначены для соединения коллектора с внешней цепью и прижимаются к поверхности коллектора пружинами (рис. 2.9, а). При вращении якоря щетки сохраняют неизменное положение по отношению к полюсам машины. Щеткодержатели укрепляют на щеточных пальцах и изолируются от них. Щеточные пальцы, в свою очередь, крепят либо к подшипниковому щиту, либо к траверсе, которая позволяет при необходимости поворачивать всю систему щеток по отношению к полюсам машины. В машинах малой мощности часто применяют трубчатые щеткодержатели (рис. 2.9, б ), устанавливаемые непосредственно в подшипниковом щите. Щетки (рис. 2.10) в зависимости от состава, способа изготовления и физических свойств могут иметь различную маркировку. Все марки объединяются в шесть основных групп: угольно-графитные, графитные, электрографитированные, медно-графитные, бронзо-графитные и серебряно-графитные. Для каждой машины следует применять только щетки установленной марки, которая выбирается заводом-изготовителем исходя из условий работы машины.
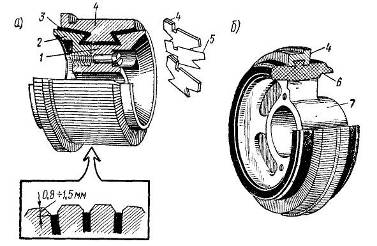
Рис. 2.8 – Коллектор машины постоянного тока с металлическим (а)
и пластмассовым (б) корпусом:
1 – корпус, 2 – нажимной фланец, 3-изоляционные манжеты, 4 – коллекторные пластины, 5 – изоляционные прокладки, 6 – пластмасса, 7 – втулка
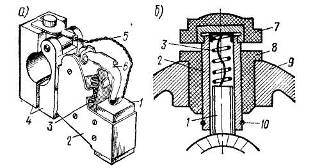
Рис. 2.9 – Щеткодержатели машин средней (а) и малой (б) мощности:
1 – щетка, 2 – обойма, 3 – пружина, 4 – зажимы для крепления к щеточному пальцу, 5-щеточным канатик, 6 – нажимной палец, 7 – колпак, 8 – иэолящ. олная втулка, 9 – подшипниковый щит, 10 – зажим для выводного проводника
2.3 Э.д.с. и электромагнитный момент машины постоянного тока
Процесс индуктирования э.д.с. в обмотке якоря. Рассмотрим процесс индуктирования э.д. с. в обмотке якоря, проводники которой для простоты будем считать равномерно распределенными вдоль окружности якоря (рис. 2.11, а). При вращении якоря в проводниках, лежащих под полюсами N и S, индуктируются э. д. с. противоположного направления. Проводники, в которых индуктируются эти э. д. с, расположены по обе стороны от геометрической нейтрали 0–0 -оси симметрии, разделяющей полюсы. На рис. 2.11, б показана электрическая схема обмотки якоря с коллектором. Она выполнена в виде многофазной обмотки, состоящей из большого числа витков, подключенных к пластинам коллектора, так чтобы между каждой парой смежных коллекторных пластин был включен один или несколько витков.
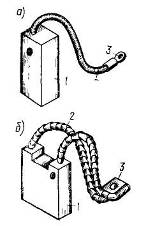
Рис. 2.10 – Щетки машин малой (а) и большой (б) мощности:
1 – щетка, 2 – щеточный канатик, 3 – кабельный наконечник
На коллектор накладываются щетки А иВ, посредством которых вращающаяся обмотка якоря соединяется с внешней цепью. При вращении якоря между щетками А иВ действует постоянная по величине э.д. с. Е, равная сумме э. д. с, индуктированных во всех последовательно соединенных витках обмотки якоря, которые включены между щетками. Чтобы подать от обмотки якоря во внешнюю цепь максимальное напряжение, ее нужно присоединить к двум точкам обмотки якоря, между которыми действует наибольшая разность потенциалов. Такими точками при холостом ходе машины являются точки а иb (рис. 2.11, б ), расположенные на геометрической нейтрали, где и следует устанавливать щетки А и В.
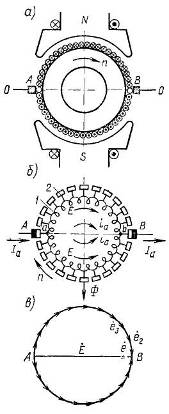
Рис. 2.11 – Якорь машины постоянного тока (а), упрощенная схема его обмотки (б) и векторная диаграмма индуктируемых в ней э. д. с (в):
1 – обмотка якоря, 2 – коллектор
При вращении якоря точки а и b смещаются с геометрической нейтрали, но к щеткам будут подходить все новые и новые точки обмотки, между которыми действует э.д. с. Е, поэтому э.д. с. во внешней цепи будет неизменна по величине и направлению. Уменьшения пульсаций э. д. с. Е при переходе щеток с одной коллекторной пластины на другую добиваются установкой большого числа коллекторных пластин; число коллекторных пластин, приходящихся на одну параллельную ветвь обмотки якоря, должно быть не менее восьми.
Если заменить несинусоидальную э.д. с, индуктируемую в витках обмотки якоря, эквивалентной синусоидальной э.д. с, то действующая между щетками А и В э.д.с. Е может быть получена из векторной диаграммы (рис. 2.11, в ). Из нее следует, что при достаточно большом числе секций обмотки якоря э. д. с. Ė будет практически неизменна во времени и равна диаметру окружности, описанной вокруг многоугольника э.д. с. ė 1 , ė 2 , ė 3 и т.д., индуктированных в отдельных витках этой обмотки.
Щетки А и В разделяют рассматриваемую обмотку на две параллельные ветви, в каждой из которых действует э.д. с. Е. При разомкнутой внешней цепи ток по обмотке не проходит, так как э.д.с, индуктированные в двух ее ветвях, направлены встречно и взаимно компенсируются. Полная компенсация будет, очевидно, иметь место при строго симметричном выполнении обмотки и равенстве магнитных потоков полюсов; условие симметрии в случае двухполюсной обмотки сводится к равномерному распределению проводников на внешней поверхности якоря.
Электродвижущая сила. Мгновенное значение э.д. с, индуктируемой в каждом активном проводнике (рис. 2.12),
![]() , (2.1)
, (2.1)
где В х –индукция в рассматриваемой точке х воздушного зазора; va –окружная скорость якоря; lа –длина проводника в магнитном поле.
Следовательно,
![]() . (2.2)
. (2.2)
Здесь N – общее числа активных проводников обмотки якоря; N/2а – число активных проводников, входящих в одну параллельную ветвь.
При достаточно большом числе коллекторных пластин можно пренебречь пульсацией э. д.с. и считать, что
![]() , (2.3)
, (2.3)
где В ср – среднее значение индукции на протяжении полюсного деления τ.
Учитывая также, что
Вср 1а t = Ф, (2.4)
где τ = πDa /(2 p ) – полюсное деление;
![]() ,
,
Получим
![]() , (2.5)
, (2.5)
где се = pN /(60 a ) – коэффициент, определяемый конструктивными параметрами машины и не зависящий от режима ее работы.
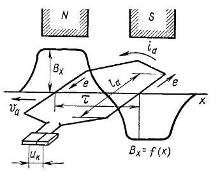
Рис. 2.12 – Направление э д с и тока в витке обмотки якоря при его вращении относительно полюсов
Формула (2.5) дает среднее значение э.д.с. Е. В действительности величина ее колеблется (пульсирует) между двумя предельными значениями – Емакс и Емин . При вращении якоря часть витков, замыкаясь накоротко щетками, выключается из параллельных ветвей и за время поворота якоря на угол, соответствующий одной коллекторной пластине, сумма мгновенных значений э.д.с. успевает несколько измениться. Максимальное значение возникающих при этом пульсаций э.д.с. ΔЕ = 0,5 (Емакс – Емин ) зависит от числа коллекторных пластин К:
| К | 2 | 4 | 8 | 10 | 20 | 40 |
| DЕ, % | 100 | 17,2 | 4 | 2,5 | 0,62 | 0,16 |
Значения ΔЕ приведены в процентах от теоретического среднего значения э.д.с. Е.
Период пульсаций равен времени поворота якоря на одну коллекторную пластину, вследствие чего их частота в K /p раз больше частоты fa , с которой изменяется э.д. с, индуктированная в проводниках обмотки якоря.
Напряжение между соседними коллекторными пластинами. Если падением напряжения в витке пренебречь, то напряжение и к между соседними пластинами будет равно сумме э.д. с, индуктируемых во включенных между ними витках обмотки якоря. Например, для обмотки, состоящей из одновитковых секций (рис. 2.12), напряжение и к = 2е. Из (2.1) следует, что э.д. с. е пропорциональна индукции Вх в соответствующей точке воздушного зазора. Поэтому кривая распределения вдоль коллектора напряжений и к между соседними пластинами будет подобна кривой распределения индукции Bx = f( x) в воздушном зазоре (рис. 2.13, а).
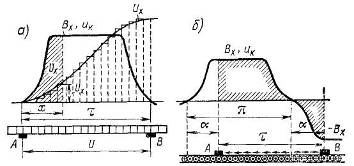
Рис. 2.13 – Кривые распределения индукции Вх и напряжения ик вдоль окружности якоря при установке щеток на геометрической нейтрали (а) и при сдвиге их с нейтрали (б)
Важной характеристикой надежности работы машины постоянного тока является так называемая потенциальная кривая, представляющая собой зависимость изменения напряжения Ux вдоль окружности коллектора. При переходе от одной коллекторной пластины к другой напряжение Uх изменяется ступенчато, но при достаточно большом числе коллекторных пластин эту зависимость можно заменить плавной кривой (рис. 2.13, а). Потенциальная кривая является интегральной по отношению к кривой магнитного поля Bx = f( x), так как площадь кривой магнитного поля пропорциональна сумме э.д. с, индуктируемых во всех витках, которые включены между щетками А и В. Наибольшее напряжение между соседними коллекторными пластинами и к.макс возникает там, где потенциальная кривая имеет наибольшую крутизну.
Как было указано выше, при холостом ходе машины значение э.д. с. Е будет максимальным при установке щеток А и В на геометрической нейтрали. Если смещать щетки с геометрической нейтрали на некоторый угол α(рис. 2.13, б ), то часть окружности якоря, соответствующая углу α, будет находиться в зоне с индукцией – Вх , созданной полюсом противоположной полярности. При этом уменьшится результирующая э.д. с. Е и напряжение U между щетками А и В, так как в проводниках якоря, расположенных в
указанной зоне, индуктируются э. д. с, противоположные по направлению э. д. с. в остальных проводниках.
Электромагнитный момент. На якорь, по обмотке которого проходит ток Iа , действует электромагнитный момент
M = 0,5 Fve 3 Da , (2.6)
где F peз – результирующая электромагнитная сила, возникающая при взаимодействии тока с магнитным полем.
Сила F рез представляет собой сумму усилий fx , приложенных ко всем активным проводникам обмотки якоря,
![]() .
.
При достаточно большом числе коллекторных пластин силу F рез можно считать постоянной:
![]() . (2.7а)
. (2.7а)
Здесь iа –ток в одной параллельной ветви (см. рис.2.12),
С учетом (2.4) и (2.7а) электромагнитный момент
![]() (2.7б)
(2.7б)
При работе машины в двигательном режиме электромагнитный момент является вращающим, а в генераторном режиме–тормозным.
В настоящее время применяют якоря только барабанного типа, в которых проводники обмотки укладывают в два слоя в пазы, расположенные на наружной поверхности якоря (рис. 2.14, а). Для того чтобы э.д.с, индуктированные в двух сторонах каждого витка, складывались, стороны его следует располагать под полюсами противоположной полярности (рис. 2.14, б). В этом случае в каждом витке индуктируется э.д.с, в два раза большая, чем в одном проводнике. Следовательно, как и в обмотках переменного тока, основной шаг обмотки должен быть равен полюсному делению τ.
Обмотки барабанного якоря подразделяют на две основные группы: петлевые (параллельные) и волновые (последовательные). В машинах большой мощности применяют также параллельно-последовательную (лягушачью) обмотку, в которой сочетаются элементы петлевой и волновой обмоток. Основной частью каждой обмотки является секция, состоящая из одного или нескольких последовательно включенных витков; концы секций присоединяют к двум коллекторным пластинам. Число секций S равно числу коллекторных пластинK. Все секции обмотки обычно имеют одинаковое количество витков. На схемах обмоток секции для простоты всегда изображают одновитковыми. При двухслойной обмотке стороны секции, расположенные в верхнем слое, изображают сплошными линиями, а в нижнем слое–штриховыми (рис. 2.14, в).
Шаг секции y i (его называют также основным или первым частичным шагом обмотки) должен быть приблизительно равен полюсному делению т. При у i = τшаг называют диаметральным; при у i <τ – укороченным; при у i >τ – удлиненным.
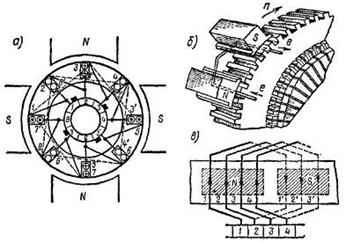
Рис. 2.14 – Расположение проводников обмотки на якоре барабанного типа (а, 6) и схема двухслойной обмотки (в)
Простая петлевая обмотка. При простой петлевой обмотке секцию присоединяют к соседним коллекторным пластинам (рис. 2.15, а). Для выполнения обмотки необходимо знать ее результирующий шаг у (рис. 2.15, б), первый у 1 и второй у 2 частичные шаги, а также шаг по коллектору у к . Результирующим шагом обмотки называют расстояние между начальными сторонами двух секций, следующих друг за другом по ходу обмотки; первым частичным шагом – расстояние между двумя сторонами каждой секции (шаг секции); вторым частичным шагом – расстояние между конечной стороной одной секции и начальной стороной следующей секции. Указанные расстояния обычно выражают в числе пройденных секций. Шагом по коллектору называют расстояние в коллекторных делениях между пластинами, к которым присоединены две стороны каждой секции. Так как K = S, то результирующий шаг обмотки у и шаг по коллектору у к равны. При петлевой обмотке y = y 1 –y 2 и у к =у. Обмотку называют простой, если у=у к =± 1. В этой обмотке каждая последующая секция расположена рядом с предыдущей, а якорная катушка имеет форму петли, откуда и получила свое название рассматриваемая обмотка. Обычно при выполнении обмотки принимают у к = + 1(неперекрещенная обмотка), так как в этом случае несколько снижается расход обмоточного провода. На рис. 2.16 показаны якорные катушки машин постоянного тока при петлевой и волновой обмотках.
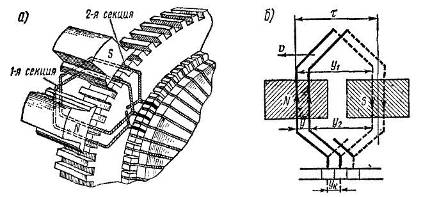
Рис. 2.15 – Общий вид петлевой обмотки (а) и схема соединений ее секций (б)
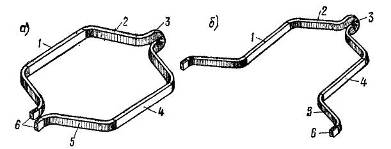
Рис. 2.16 – Формы якорных катушек при петлевой (а) и волновой (б) обмотках (при одновитковых секциях):
1, 4 – пазовые части, 2, 5 – лобовые части, 3 – задняя головка,
5 – концы секций, припаиваемые к коллектору
В простой петлевой обмотке секции, расположенные под каждой парой полюсов, образуют две параллельные ветви. Например, на рис. 2.17 показано образование параллельных ветвей в обмотке якоря четырехполюсной машины. В каждую из параллельных ветвей входит S в =S /(2p ) секций, поэтому число параллельных ветвей во всей обмотке
2 a = S/ SB = 2 p. (2.8)
Условие 2а = 2 р выражает основное свойство простой петлевой обмотки: чем больше число полюсов, тем больше параллельных ветвей имеет обмотка. Следовательно, тем больше щеточных пальцев должно быть в машине. По этой причине простую петлевую обмотку часто называют параллельной. На рис. 2.18, а в качестве примера изображена схема петлевой обмотки четырехполюсной машины, а на рис. 2.18, б –эквивалентная схема ее, показывающая последовательность соединения отдельных проводников и образующиеся параллельные ветви. При этом цифрами 1, 2, 3 и т.д. обозначены активные проводники, лежащие в верхнем слое, а цифрами 1 ', 2', 3' и т.д. – лежащие в нижнем слое обмотки.
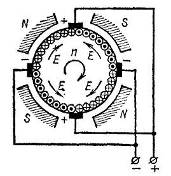
Рис. 2.17 – Образование параллельных ветвей в обмотке якоря четырехполюсной машины
Э.д.с. Е, индуктированные во всех параллельных ветвях петлевой обмотки, теоретически должны быть равны. Практически из-за технологических допусков в величине воздушного зазора под разными полюсами, дефектов литья в корпусе и других причин магнитные потоки отдельных полюсов несколько различаются между собой, а поэтому в параллельных ветвях действуют неодинаковые э.д.с. Разница между ними составляет 3–5%, однако вследствие небольшого сопротивления обмотки якоря этого оказывается достаточно, для того чтобы по параллельным ветвям даже при холостом ходе проходили довольно значительные уравнительные токи, которые загружают щетки и способствуют возникновению искрения на коллекторе. Чтобы уравнительные токи замыкались помимо щеток, в петлевых обмотках предусматривают уравнительные соединения, которые соединяют точки обмотки, имеющие теоретически равные потенциалы. Обычно для этой цели соединяют между собой коллекторные пластины, к которым подключены равно потенциальные точки обмотки (см. штриховые линии на рис. 2.18). Практически достаточно иметь одно-два уравнительных соединения на каждую группу секций, лежащих в одном пазу якоря, т.е. снабжать уравнителями 1/2 или 1/3 коллекторных пластин. Уравнительные соединения располагают чаще всего под лобовыми частями обмотки рядом с коллектором. В этом случае они находятся вне магнитного поля главных полюсов и в них э.д.с. не индуктируется. Протекающие по уравнительным соединениям токи, проходя по параллельным ветвям обмотки якоря, создают м.д.с, которые уменьшают неравенство магнитных потоков отдельных полюсов.
Простая волновая обмотка. При простой волновой обмотке секции, лежащие под разными полюсами, соединяют последовательно (рис. 2.19, а). При этом после одного обхода окружности якоря, т.е. последовательного соединения р секций, приходят к коллекторной пластине, расположенной рядом с исходной.
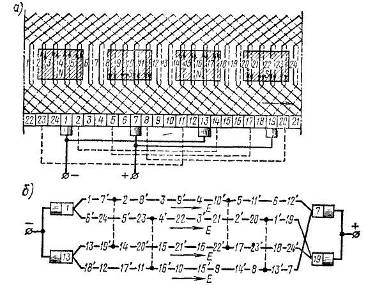
Рис. 2.18 – Петлевая обмотка четырехполюсной машины (а) и ее эквивалентная схема (б): S = K=24, y1 = 6; у2 = 5; у=ук =1
Результирующий шаг обмотки (рис. 2.19, б) у = у 1 + у 2 ; частичные шаги (у 1 ≈ у 2 ) приблизительно равны полюсному делению τ, а шаг по коллектору у к –двойному полюсному делению. Между шагом по коллектору у к и количеством коллекторных пластин K существует зависимость
рук ±1 =К ,
откуда
ук = (К±1)/р. (2.9)
Так как у к должен быть целым числом, то число коллекторных пластин K, не может быть произвольным. Предпочтительно брать y к = (K -1) /р (неперекрещенная обмотка), так как при этом несколько уменьшается расход обмоточного провода. Якорная катушка в рассматриваемой обмотке имеет форму волны (см. рис. 2.16, б), поэтому обмотку и называют волновой. В якоре барабанного типа направление э.д.с. сохраняется неизменным во всех сторонах секций, расположенных в пределах одного полюсного деления, т.е. в S /(2p )сторонах секций.
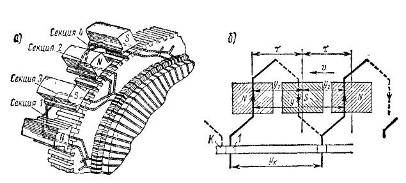
Рис. 2.19 – Общий вид волновой обмотки (а) и схема соединения ее секций (б)
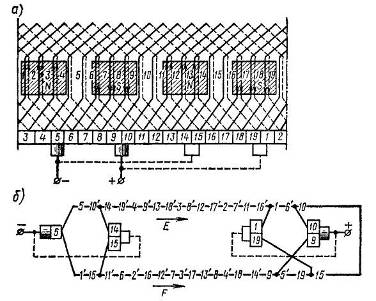
Рис. 2.20 – Волновая обмотка четырехполюсной машины и ее эквивалентная схема:
S=K= 19, у1 = 5; у2 =4; у = ук = 9
В простой волновой обмотке при одном обходе окружности якоря соединяют последовательно 2 р сторон секций; поэтому количество секций в каждой параллельной ветви S в = pS /(2p ) = S /2, а число параллельных ветвей обмотки
2 a = S/ SB = 2. (10–10).
Следовательно, число параллельных ветвей при простой волновой обмотке не зависит от числа полюсов и всегда равно двум. По этой причине такую обмотку часто называют последовательной. Уравнительные соединения при простой волновой обмотке не требуются, так как в каждую параллельную ветвь входят секции, стороны которых расположены под всеми полюсами. В результате этого неравенство потоков отдельных полюсов не вызывает неравенства э.д.с. в параллельных ветвях. На рис. 2.20, а показана схема простой волновой обмотки четырехполюсной машины, а на рис. 2.20, б – эквивалентная схема ее, показывающая последовательность соединений отдельных секций обмотки и образующиеся при этом параллельные ветви. При волновой обмотке в машине можно устанавливать только два щеточных пальца. Однако это делают лишь в машинах малой мощности; в более мощных машинах для уменьшения плотности тока под щетками и улучшения токосъема обычно ставят полный комплект (2 р ) щеточных пальцев.
Области применения различных обмоток. Двухполюсные машины небольшой мощности выполняют с простой петлевой обмоткой, так как при двух полюсах волновая обмотка превращается в петлевую. По мере увеличения мощности обычно переходят к более компактным четырехполюсным машинам, имеющим меньшую массу, чем двухполюсные машины. Четырехполюсные машины небольшой и средней мощности часто имеют волновую обмотку, не требующую применения уравнительных соединений. При повышенном напряжении на щетках (до 1000 В и более) такую обмотку применяют в четырехполюсных машинах мощностью до 200 – 300 кВт. Если же напряжение на коллекторе невелико (110 или 220 В), то уже при мощности в десятки киловатт применяют четырехполюсные машины с петлевой обмоткой для уменьшения тока ia в параллельной ветви. Величина этого тока даже в весьма мощных машинах не должна превышать 250–300 А, так как при выполнении обмотки из проводников очень большого сечения возникают значительные технологические трудности при изготовлении якорных катушек и их укладке. При простой петлевой обмотке ток ia = Iа /(2a ) = Iа /(2p ), поэтому с ростом мощности и тока машины для сохранения тока ветви в допустимых пределах увеличивают число полюсов.
Сложные обмотки. При мощности более 1000 кВт становится выгодным применять сложные многоходовые обмотки якоря. В простейшем случае многоходовые обмотки представляют собой m простых петлевых или волновых обмоток, наложенных на общий якорь и смещенных относительно друг друга. В сложной петлевой обмотке число параллельных ветвей 2а = 2рm, а в сложной волновой – 2а = 2m , где m -число ходов обмотки. Результирующий шаг обмотки и шаг по коллектору соответственно равны:
у = ук = ±т; у = ук = (К±т)/р.
Применение многоходовых обмоток позволяет увеличивать число параллельных ветвей при неизменном числе полюсов, увеличение которых в ряде случаев невозможно. Однако эти обмотки требуют сложных уравнительных соединений.
В машинах большой мощности часто используют параллельно-последовательную (лягушачью) обмотку, представляющую собой комбинацию простой петлевой и многоходовой волновой обмоток (рис. 2.21). Обе обмотки уложены в одни и те же пазы и имеют общие коллекторные пластины. Чтобы уравнять э.д.с. параллельных ветвей, образуемых петлевой и волновой обмотками, число параллельных ветвей 2а этих обмоток должно быть одинаковым; для этого число ходов m. волновой обмотки должно быть равно р.
Секции волновой и петлевой обмоток являются друг для друга уравнителями, поэтому лягушачью обмотку выполняют без специальных уравнительных соединений.
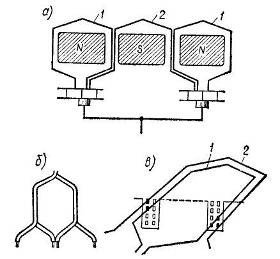
Рис. 2.21 – Схема соединения секций лягушачьей обмотки (а), форма ее якорной катушки (б) и расположение проводников в пазах (в):
1-петлевая обмотка, 2 – волновая обмотка
2.5 Магнитное поле машины постоянного тока
Холостой ход. При холостом ходе магнитный поток в машине создается только м.д.с. F в обмотки возбуждения.
В этом случае магнитный поток Фв при симметричном воздушном зазоре между якорем и сердечником главного полюса распределяется симметрично относительно продольной оси машины (рис. 2.22, а ).
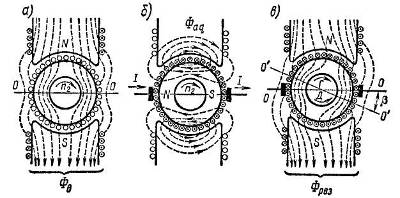
Рис. 2.22 – Магнитное поле машины постоянного тока, создаваемое:
а–обмоткой возбуждения, б – обмоткой якоря, в-результирующее
Зависимость магнитного потока возбуждения Фв от м.д.с. F в (кривая намагничивания–рис. 2.23) для машин постоянного тока подобна кривой намагничивания для синхронных машин. Однако при проектировании машин постоянного тока допускают большие индукции на участках магнитной цепи, чем в синхронных машинах (в зубцах, якоре, станине и полюсах), вследствие чего для них коэффициент насыщения K нас = F /F δ = ab /ac = 1, 2 ÷ 2 . Расчет магнитной цепи машины постоянного тока производят так же, как и для машин переменного тока.
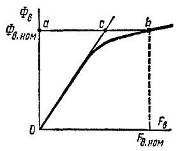
Рис. 2.23 – Кривая намагничивания машины постоянного тока
Реакция якоря. При работе машины под нагрузкой по обмотке якоря проходит ток, вследствие чего возникает м.д.с. якоря. Воздействие м.д.с. якоря на магнитное поле машины называют реакцией якоря. Для упрощения анализа явления реакции якоря будем пренебрегать насыщением магнитной цепи машины и считать, что м.д.с. F в обмотки возбуждения и м.д.с. Fa q обмотки якоря целиком расходуются на преодоление магнитными потоками воздушного зазора. В этом случае вместо указанных м.д.с. можно рассматривать соответствующие потоки: возбуждения Фв и реакции якоря Фа q . Магнитный поток Фа q , созданный м.д.с. якоря Fa q в двухполюсной машине при установке щеток на геометрической нейтрали, направлен по поперечной оси машины (рис. 2.22, б), поэтому магнитное поле якоря называют поперечным. В результате действия реакции якоря симметричное распределение магнитного поля машины искажается; при этом результирующее магнитное поле оказывается смещенным к краям главных полюсов (рис. 2.22, в). При этом физическая нейтраль 0' –0' (линия, соединяющая точки окружности якоря, в которых индукция равна нулю) смещается относительно геометрической нейтрали 0 –0 на некоторый угол β. В генераторах физическая нейтраль смещается по направлению вращения якоря; в двигателях – против направления вращения.
Чтобы построить кривую B рез = f( x) распределения результирующей индукции вдоль окружности якоря, применим метод суперпозиции. Так как обмотка возбуждения является сосредоточенной, то кривая распределения создаваемой ею м.д.с. F' в = f( x) имеет форму прямоугольника, где F' в = 0,5F в – м.д.с, приходящаяся на один воздушный зазор. В этом случае кривая индукции B в = f( x) имеет форму криволинейной трапеции (рис. 2.24, а ).
Для построения кривой м.д.с. Faqx =f( x) и создаваемой ею индукции Baqx = f( x) примем, что обмотка якоря равномерно распределена по его окружности. Тогда на основании закона полного тока м.д.с. якоря, действующая вдоль контура обхода через точки воздушного зазора на расстоянии х от оси главных полюсов,
![]() , (2.11)
, (2.11)
а м.д.с, приходящаяся на один зазор,
![]() , (2.11а)
, (2.11а)
где A = ia N /( πDa ) – линейная нагрузка якоря (число ампер, приходящихся на 1 см окружности якоря).
Следовательно, м.д.с. якоря Faqx изменяется линейно вдоль его окружности (рис. 2.24, б); под серединой главного полюса она равна нулю, а в точках, где установлены щетки, имеет максимальное значение. При ненасыщенной магнитной системе магнитная индукция в воздушном зазоре
![]() , (2.12)
, (2.12)
где δx –величина воздушного зазора в точке х.
Из (2.12) следует, что под полюсом при δx =const индукция Вaqx изменяется линейно вдоль окружности якоря. Но в междуполюсном пространстве резко возрастает длина магнитной силовой линии, т.е. величина δx , и индукция Baqx резко уменьшается. В результате кривая распределения Baqx = f( x) приобретает седлообразную форму. Кривую распределения результирующей индукции B рез = f( x) можно получить путем алгебраического сложения ординат кривых B в = f( x) и Baqx = f( x). Как видно из рис. 2.24, в, максимум индукции B макс имеет место под краями главных полюсов.
Реакция якоря, таким образом, оказывает следующее влияние на магнитное поле машины:
а) физическая нейтраль 0' –0' (см. рис. 2.22) смещается относительно геометрической нейтрали 0 –0 на некоторый угол β;
б) искажается кривая распределения индукции B рез =f( x) в воздушном зазоре и возрастает индукция под краями главных полюсов, что ведет к повышению напряжения в секциях, стороны которых проходят зоны с увеличенной индукцией.
Кроме того, как будет показано ниже, результирующий магнитный поток машины при насыщенной магнитной цепи уменьшается.
Размагничивающее действие поперечного поля реакции якоря. Если магнитная цепь машины не насыщена, то кривая результирующей индукции в воздушном зазоре под действием реакции якоря искажается (рис. 2.24, в) но площадь ее остается равной площади кривой индукции при холостом ходе (рис. 2.24, а).
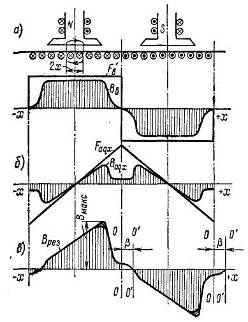
Рис. 2.24 – Распределение индукции в воздушном зазоре машины постоянного тока:
а–от обмотки возбуждения, б – от обмотки якоря, в-результирующее
Следовательно, результирующий поток Фрез при нагрузке будет равен потоку Фв при холостом ходе. Однако при насыщенной магнитной цепи реакция якоря будет уменьшать поток Фрез . Чтобы установить влияние м.д.с. Faq на величину потока Фреэ , рассмотрим зависимость результирующей индукции B рез в воздушном зазоре от результирующей м.д.с. F peз x = F' в ± Faqx , действующей в некоторой точке х зазора (рис. 2.25).
Примем, что в машине насыщены только зубцы якоря. Тогда м.д.с F' в будет расходоваться на преодоление магнитного сопротивления одного воздушного зазора и одного зубцового слоя. В точках, лежащих пол серединой полюсов, эта м.д.с. создает индукцию B ср = B в , так как в этих точках м.д.с. Faqx = 0. По мере приближения к одному из краев полюса, например к правому, у полюса N (см. рис. 2.24, в ) индукция B рез будет возрастать до величины B пр x , так как здесь действует м.д.с. F' в + Faqx ;при приближении к другому краю этого полюса (в данном случае к левому) индукция будет уменьшаться до В левх , так как здесь действует м. д. с. F' в – Faqx .Однако из-за нелинейного характера зависимости B peз = f( x) прирост индукции ΔB пр x у правого края полюса будет меньше, чем снижение индукции ΔB левx . у левого края, вследствие чего результирующий поток машины уменьшится [см. косую штриховку в кривой индукции B рез = f( x) на рис. 2.24, в ].
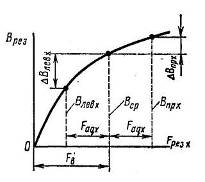
Рис. 2.25 – Определение размагничивающего действия поперечного поля реакции якоря
Хотя снижение магнитного потока под действием м.д.с. якоря обычно невелико и составляет всего 1–3%, это существенно сказывается на характеристиках генераторов постоянного – тока и приводит к уменьшению э.д.с. Е машины при нагрузке по сравнению с э.д.с. Е 0 при холостом ходе.
Если машина работает при небольших токах возбуждения, т.е. на прямолинейной части кривой намагничивания, то редакция якоря размагничивающего действия не оказывает. Аналогичный эффект будет и при очень большом насыщении, когда машина снова работает на прямолинейном участке кривой намагничивания.
Реакция якоря при сдвиге щеток с геометрической нейтрали. В этом случае окружность якоря с обмоткой можно разделить на четыре зоны (рис. 2.26). Две из них, охватывающие стороны секций в пределах угла 2α, образуют продольную м.д.с. Fad
Fad = (2 a/ n) A; (2.13)
две другие, охватывающие стороны секций в пределах угла (π–2а), – поперечную м.д.с.
Fa9 = [(n – 2a)/n] A. (2.13a)
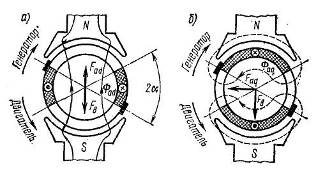
Рис. 2.26 – Возникновение продольной (а) и поперечной (б) м. д. с. якоря при сдвиге щеток с геометрической нейтрали
Продольная м.д.с. Fad создает продольный поток Фаd , который может сильно увеличивать или уменьшать результирующий магнитный поток машины Фрез в зависимости от того, совпадает м.д.с, Fad с м.д.с. F в или направлена против нее. Направление определяется тем, в какую сторону сдвинуты щетки. Если щетки сдвинуты по направлению вращения генератора или против направления вращения электродвигателя, то продольная м.д.с. Fad размагничивает машину. При сдвиге щеток в обратном направлении м.д.с. Fad подмагничивает машину. Свойство продольной м.д.с. Fad изменять результирующий магнитный поток Фрез используется в некоторых специальных машинах, например в электромашинных Усилителях с поперечным полем. Поперечная м.д.с. Faq создает магнитный поток Фaq ; она действует на поток Фрез так же, как и при расположении щеток на геометрической нейтрали.
2.6 Круговой огонь на коллекторе
При эксплуатации машины постоянного тока на коллекторе иногда возникает электрическая дуга или множество мелких электрических разрядов. Это явление называют круговым огнем.
Причиной возникновения кругового огня является чрезмерно высокое напряжение между смежными коллекторными пластинами.
Если напряжение между смежными пластинами превышает 25 В, то между этими пластинами возможно появление короткой электрической дуги.
При работе машины постоянного тока смежные коллекторные пластины могут оказаться замкнутыми через «мостик», образуемый угольной пылью или более крупными осколками щетки. В этом случае по «мостику» проходит ток, происходит его сгорание и возникает короткая дуга.
Процесс изменения тока в дуге описывается дифференциальным уравнением
![]() , (2.14)
, (2.14)
где е с –мгновенное значение э.д.с. секции; r с – активное сопротивление секции; L c – индуктивность секции; Δид – падение напряжения в стволе дуги; Δи э – околоэлектродное падение напряжения в электрической дуге.
Величина Δи э для медных электродов составляет 20–23 В, что и определяет в основном минимальную величину напряжения между коллекторными пластинами, при которой возможно появление кругового огня.
Дальнейшее (после появления короткой дуги) развитие процесса зависит от параметров электрической машины: ее мощности, величины активного сопротивления и индуктивности секции, частоты вращения ротора и т.д.
В машинах малой мощности, у которых секции обмотки якоря имеют довольно большое активное сопротивление и индуктивность, ток в короткой дуге невелик, и явление кругового огня протекает сравнительно безвредно. В этом случае на коллекторе в зонах, где действует значительное напряжение между пластинами, возникает небольшое искрение. Это явление иногда называют потенциальным искрением, так как оно обусловлено повышенной разностью потенциалов между пластинами коллектора. При более мощных коротких дугах происходит оплавление смежных пластин, при этом образуются кратеры диаметром 2–3 мм и на коллекторе наблюдаются так называемые вспышки. Это явление более опасно, так как оплавленные края коллекторных пластин вызывают быстрый износ щеток, а иногда их полное разрушение.
В мощных машинах, а также машинах средней и малой мощностей с высокими значениями напряжения между коллекторными пластинами, единичная короткая дуга между смежными пластинами перерастает в мощную дугу. Эта дуга перекрывает значительную часть коллектора или даже замыкает накоротко щеткодержатели разной полярности (перекрытие коллектора). Возникновение мощной дуги на коллекторе сопровождается сильным световым и звуковым эффектом (в крупных машинах это похоже на взрыв бомбы). Большой ток якоря, возникающий при перекрытии коллектора, вызывает срабатывание защиты и повреждает поверхность коллектора, изоляторы щеткодержателей и т.д., т.е. выводит машину из строя.
Процессы перерастания единичной вспышки в круговой огонь очень быстротечны, что затрудняло их изучение. Было создано немало различных гипотез, пока не удалось сфотографировать весь процесс скоростной кинокамерой (4000 кадров в секунду). На рис. 2.27, а показала схема развития единичной вспышки в круговой огонь. Короткая дуга возникает из-за наличия «мостика» между» пластинами а и b. Ток в дуге быстро увеличивается и пространство над коллектором ионизируется, т.е. заполняется раскаленными парами меди. По мере вращения коллектора все большее пространство становится ионизированным и, наконец, дуга перекрывает несколько пластин, что ведет к еще большему возрастанию тока. Дальнейшее развитие процесса носит случайный характер, но всегда сопровождается повреждением коллектора и других деталей машины. Процесс перерастания единичной вспышки в мощную дугу длится 0,01–0,001 с и поэтому не удается создать от него какую-либо защиту.
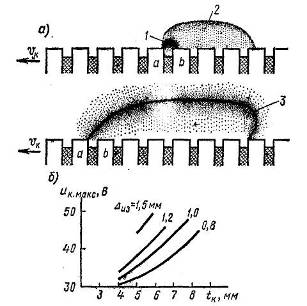
Рис. 2.27 – Возникновение кругового огня на коллекторе и зависимость предельно допустимых напряжений ик .макс от коллекторного деления tк :
1 – первичная дуга при замыкании смежных коллекторных пластин,
2 – газы и пары меди, 3 – мощная дуга
Для предотвращения возможности возникновения кругового огня необходимо снижать величину максимального напряжения между смежными коллекторными пластинами. На рис. 2.27, б показаны зависимости предельно допустимых величин максимальных напряжений между смежными коллекторными пластинами u к.макс от величины коллекторного деления t к для мощных электрических машин. Чем меньше толщина изоляции Δиз между пластинами и тоньше сами пластины, тем ниже должно быть выбрано максимальное напряжение. Безусловно, эти рекомендации являются ориентировочными, так как в них не учитываются частота вращения, величина воздушного зазора и т.д.
Искрение под щетками способствует появлению кругового огня, так как при этом происходит интенсивный износ щетрк, а следовательно, повышается вероятность появления токопроводящих мостиков.
Довольно длительное время была распространена гипотеза, согласно которой первоначальной причиной возникновения кругового огня является вытягивание дуги из-под щетки. Но она не подтвердилась практикой и экспериментами. Одним из доказательств развития кругового огня из единичной вспышки были опыты с генератором, работающим в режиме холостого хода со снятыми щетками. В этом случае искрение под щетками отсутствовало, но при достаточно высоком напряжении u к.макс возникал круговой огонь:
1) когда промежуток между смежными пластинами засорялся осколком щетки; 2) когда между этими пластинами искусственно зажигали короткую дугу с помощью вспомогательного электрода.
Реакция якоря искажает магнитное поле в воздушном зазоре машины, увеличивая магнитную индукцию под одним из краев главных полюсов (см. рис. 2.24). Вследствие этого возрастает максимальное напряжение u к .макс между смежными пластинами и увеличивается опасность кругового огня.
Для машин с петлевой и волновой обмотками соответственно:
 , (2.15)
, (2.15)
где ωс –число витков в секции; р –число пар полюсов.
Чтобы уменьшить вероятность возникновения кругового огня, в крупных машинах используют обмотки якоря с одновитковыми секциями (ωc =1),снижают среднее напряжение между коллекторными пластинами до 15–18 В (при этом соответственно ограничивают активную длину якоря) и принимают меры для уменьшения искажающего действия реакции якоря, т.е. индукции Baq . Уменьшение Baq проще всего достигается путем увеличения воздушного зазора. По этой причине машины постоянного тока обычно выполняют со сравнительно большим воздушным зазором. Однако увеличение воздушного зазора требует соответствующего повышения м.д.с. обмотки возбуждения (для создания необходимого магнитного потока). А это приводит к увеличению размеров статора и всей машины.
Более выгодным является применение особой формы воздушного зазора: минимального под серединой полюса и расширяющегося к краям, где возрастает м.д.с. якоря. При такой форме зазора магнитное сопротивление для потока главных полюсов увеличивается в меньшей степени, чем для потока, создаваемого поперечной реакцией якоря. Следовательно, расширяющийся зазор требует меньшего повышения м. д. с. обмотки возбуждения, чем равномерный.
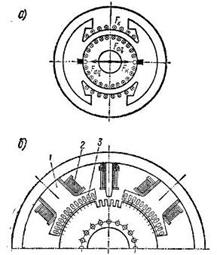
Рис. 2.28 – Принцип действия (а) и устройство (б) компенсационной обмотки:
1 – главный полюс, 2 – обмотка возбуждения, 3 – компенсационная обмотка
Еще более кардинальной мерой является применение компенсационной обмотки (рис. 2.28), которую располагают в пазах главных полюсов и соединяют последовательно с обмоткой якоря. Эту обмотку включают таким образом, чтобы образуемая ею м. д. с. Fк была направлена встречно м.д.с. якоря Faq и компенсировала ее действие. При Fк = Faq м. д. с. якоря практически не будет искажать магнитное поле в воздушном зазоре. Компенсационная обмотка существенно усложняет конструкцию машины, поэтому ее применяют только в машинах средней и большой мощности, работающих в тяжелых условиях (частые пуски, толчки нагрузки, перегрузки по току и т.п.). Кроме того, компенсационную обмотку применяют также в тех случаях, когда машина проектируется при жестких габаритных ограничениях, так как компенсационная обмотка позволяет уменьшить воздушный зазор и, следовательно, размеры обмотки возбуждения.
2.7 Коммутация
Коммутацией называют процесс изменения тока в секциях обмотки якоря при переходе их из одной параллельной ветви в другую. В более широком смысле слова под коммутацией понимают все явления и процессы, возникающие под щетками при работе коллекторных электрических машин. Если щетки искрят, то говорят, что машина имеет плохую коммутацию; если искрение отсутствует, то коммутацию называют хорошей. Качество коммутации (интенсивность искрения) в значительной степени определяет работоспособность машины и ее надежность в эксплуатации.
Причины искрения щеток. Искрение может вызываться большим количеством причин, которые обычно разбивают на две группы: механические и электромагнитные.
Типичными механическими причинами являются: биение коллектора, его эллиптичность, шероховатость рабочей поверхности коллектора, наличие выступающих коллекторных пластин и изоляционных прокладок, вибрация щеткодержателей и т.д. Все эти причины приводят к вибрации щеток, в связи с чем возможен кратковременный разрыв контакта между щеткой и коллекторными пластинами и возникновение кратковременной электрической дуги. Особенно трудно обеспечить отсутствие вибрации щеток при больших окружных скоростях коллектора – порядка 50 м/с и выше, что связано с особыми свойствами щеточного контакта.
Электромагнитные причины приводят к тому, что даже в случае идеального состояния щеточного контакта при выходе коллекторной пластины из-под щетки происходит разрыв электрической цепи, по которой проходит ток, и возникает короткая электрическая дуга, повреждающая сбегающие части щетки и коллекторных пластин. Следует отметить, что искрение, вызванное электромагнитными причинами, повреждает поверхность коллектора и приводит к вибрации щеток, т.е. способствует возникновению искрения по механическим причинам. Неустойчивость же щеточного контакта, обусловленная механическими причинами, оказывает существенное влияние на электромагнитные процессы, происходящие в коммутируемых секциях. Поэтому, как правило, искрение щеток на коллекторе является результатом совместного действия многих причин.
Необходимо иметь в виду, что стоимость ремонта и эксплуатации коллекторных машин (замена щеток, проточка коллекторов, устранение последствий кругового огня и т.д.) очень велика и в некоторых машинах (например, в тяговых электродвигателях) составляет за один год около 1/3 стоимости самой машины. Поэтому мероприятия, проводимые по уменьшению интенсивности искрения щеток, могут дать существенный технико-экономический эффект.
Качество коммутации оценивается степенью искрения (классом коммутации) под сбегающим краем щетки, из-под которого выходят пластины коллектора при его вращении. Допускаемые степени искрения согласно ГОСТ 183–74 приведены в табл. 2.1.
Как видно из табл. 2.1, при длительной работе машины допускается только слабое искрение под щетками. Однако требования ГОСТа относятся только к контролю качества коммутации электрической машины при выпуске с завода.
Таблица 2.1.
| Степень искрения (класс ком мутации) | Характеристика степени искрения | Состояние коллектора и щеток |
| 1 | Отсутствие искрения (темная коммутация) | – |
| 1 1/4 | Слабое точечное искрение под небольшой частью щетки | Отсутствие почернения на коллекторе и нагара на щетках |
| 1 1/2 | Слабое искрение под большей частью щетки | Появление следов почернения на коллекторе, легко устраняемых протиранием поверхности коллектора бензином, а также следов нагара на щетках |
| 2 | Искрение под всем краем щетки. Допускается только при кратковременных толчках нагрузки и перегрузках | Появление следов почернения на коллекторе, неустраняемых протиранием поверхности коллектора бензином, а также следов нагара на щетках |
| 3 | Значительное искрение под всем краем щетки с наличием крупных и вылетающих искр. Допускается только для моментов прямого (без реостатных ступеней) включения или реверсирования машин, если при этом коллектор и щетки остаются в состоянии, пригодном для дальнейшей работы | Значительное почернение на коллекторе, неустраняемое протиранием коллектора бензином, а также подгар и разрушение щеток |
В эксплуатации может наблюдаться искрение значительно большей интенсивности, поскольку машина работает в форсированных режимах (при перегрузках или повышенной частоте вращения). Повышенное искрение щеток может вызываться и другими особенностями эксплуатации: вибрацией и ударами машины, работой на высоте более 1000 м над уровнем моря, работой в запыленных помещениях или в агрессивной среде и т.д. Поэтому технические требования, предъявляемые к разработке машин постоянного тока, должны обязательно учитывать условия их будущей эксплуатации.
Основное уравнение коммутации. При вращении якоря секции его обмотки переходят из одной параллельной ветви в другую, вследствие чего в них изменяется направление тока (рис. 2.29, а ). Большую часть времени ток секции равен току параллельной ветви i a = I a /(2a ). Изменение направления тока в секции происходит за период времени Тк , в течение которого соединенные с секцией коллекторные пластины соприкасаются со щеткой (рис. 2.29, б ). Время Тк , в течение которого секция оказывается замкнутой накоротко щеткой, называют периодом коммутации; секции, в которых изменяется ток, называют коммутируемыми.
Период коммутации
![]() (2.16)
(2.16)
где b щ –ширина щетки; vк –окружная скорость коллектора.
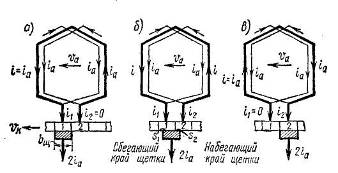
Рис. 2.29 – Направление тока в параллельных ветвях обмотки якорк (а) и график изменения тока в секции (б)
В современных машинах Т к – 0,001 ÷ 0,0001с, вследствие чего средняя скорость изменения тока в секции (di /dt )cp – 2iа /T к очень велика. Следовательно, в секции может индуктироваться большая э.д.с. само- и взаимоиндукции, называемая реактивной э.д.с :
![]() , (2.17)
, (2.17)
где Lp –результирующая индуктивность секции, определяющая величину реактивной э.д.с.
Название «реактивная» обусловлено тем, что согласно правилу Ленца эта э.д.с. препятствует изменению тока – замедляет его.
Помимо реактивной э.д.с. в коммутируемой секции индуктируется также э.д.с. вращения ек , создаваемая внешним магнитным полем и называемая коммутирующей:
![]() , (2.18)
, (2.18)
где Вк –индукция в воздушном зазоре, в зонах, где перемещаются коммутируемые секции.
Индукция Вк может создаваться м. д. с. главных полюсов и реакции якоря, а также м. д. с. добавочных полюсов, которые устанавливают в машинах постоянного тока с целью улучшения процесса коммутации.
Установим закон изменения тока в секции в период коммутации, полагая для простоты, что ширина щетки равна ширине коллекторной пластины. На рис. 2.30 показаны три основных этапа коммутации. В первый момент времени (рис. 2.30, а) ток i в коммутируемой секции, присоединенной к пластинам 1 и 2, равен ia и направлен от пластины 2к пластине 1. Ток щетки 2 ia проходит целиком через пластину 1, т.е. i 1 = 2i α и i 2 = 0. В промежуточном положении (рис. 2.30, б) одна часть тока щетки 2ia проходит по-прежнему через пластину 1 , а другая часть – через пластину 2, причем i 1 + i 2 = 2iа . К концу периода коммутации (рис. 2.30, в) пластина 1 выходит из-под щетки и ток, проходящий через нее, становится равным нулю. При этом ток щетки 2ia проходит через пластину 2, т.е. i 2 = 2 ia и i 1 = 0, а ток i в коммутируемой секции изменяет свое направление по сравнению с током в начальный момент коммутации.
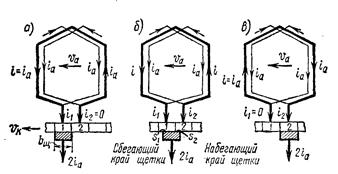
Рис. 2.30 – Распределение тока в коммутируемой секции в различные моменты коммутации
Для контура коммутируемой секции, замкнутой щеткой (рис. 2.30, б), можно написать уравнение
![]() , (2.19)
, (2.19)
где i 1 и i 2 –мгновенные значения токов, проходящих через пластины 1 и 2; i -ток в коммутируемой секции; r1 и r2 –сопротивления переходного контакта между щеткой и коллекторными пластинами: сбегающей 1 и набегающей 2; r с –сопротивление секции.
Поскольку сопротивление секции всегда значительно меньше сопротивлений щеточного контакта, влияние сопротивления rс на процесс коммутации весьма незначительно и им можно пренебречь. Тогда из (2.19) получим
![]() . (2.19а)
. (2.19а)
Это уравнение называют основным уравнением коммутации. Оно является нелинейным дифференциальным уравнением с переменными коэффициентами, так как э.д.с. ер пропорциональна di/ dt; э.д.с. ек является функцией Вк , сопротивления rх · и r2 являются функциями времени, а также плотности тока в щеточном контакте и скорости ее изменения, т.е. зависят от тока i и его производной.
Решение уравнения (2.19а) может быть получено при различных упрощающих предположениях. Далее изложены наиболее распространенные методы решения этого уравнения.
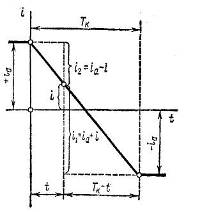
Рис. 2.31 – График изменения тока в коммутируемой секции при идеальной прямолинейной коммутации
Коммутация сопротивлением при ширине щетки, равной ширине коллекторной пластины. Из рис. 2.30, б следует, что токи i l и i 2 , проходящие через сбегающую и набегающую коллекторные пластины,
i1 = ia + i; i2 = ia – i (2.20)
Подставляя значения i 1 и i 2 в уравнение (2.19а) и решая его относительно i, получим
![]() . (2.21)
. (2.21)
Если предположить, что сопротивления r 1 и r 2 не зависят от плотности тока и определяются только площадями соприкосновения s 1 и s 2 щетки с коллекторными пластинами 1 и 2 , то отношение сопротивлений
 .
.
В этом случае уравнение (2.21) принимает вид
![]() . (2.21а)
. (2.21а)
Если подобрать е к так, чтобы в любой момент времени выполнялось условие
ev + eK = 0, (2.22)
то дифференциальное уравнение (2.21а) превращается в линейное алгебраическое уравнение
i = ia (1–2 t / TK ). (2.23)
Коммутацию, при которой ток i изменяется по линейному закону согласно (2.23), называют идеальной прямолинейной коммутацией (рис. 2.31).
Рассмотрим более подробно этот важный для практики случай коммутации. При идеальной прямолинейной коммутации сбегающая коллекторная пластина 1 выходит из-под щетки без разрыва тока, так как
i1 = ia + i = ia + ia (1–2t/TK ) = 2ia (1 – t/TK ) ,
и в момент времени t = Т к ток i 1 = 0 (весь ток 2iа проходит через пластину 2 ). Следовательно, под сбегающим краем щетки искрение возникать не будет. Кроме того, в рассматриваемом случае плотность тока под щеткой в местах соприкосновения ее с пластинами 1 и 2 остается все время постоянной и равной среднему значению: Δщ1 = Δща ==2i а /S щ = const. Так, например, в месте контакта щетки с коллекторной пластиной 1
![]() . (2.24)
. (2.24)
Аналогично, для коллекторной пластины 2
![]() . (2.24а)
. (2.24а)
Непосредственно плотность тока мало влияет на интенсивность искрения, однако равномерное распределение тока под щеткой способствует уменьшению потерь в щеточном контакте и поэтому считается положительным фактором.
Идеальная прямолинейная коммутация положена в основу инженерных методик расчета коммутации, предложенных рядом авторов. Главным условием этого расчета является взаимная компенсация мгновенных значений реактивной э.д.с. e р и э.д.с. е к , создаваемой внешним полем.
В рассмотренном случае при прямолинейной коммутации di/ dt = const , поэтому
 , (2.25)
, (2.25)
т.е. реактивная э.д.с. является величиной постоянной, равной среднему значению е р.ср . Следовательно, при расчетах коммутации компенсация мгновенного значения реактивной э.д.с. сводится к компенсации среднего значения е р.ср .
Коммутация за счет э. д. с, создаваемой внешним полем. При выводе уравнения прямолинейной коммутации было принято произвольное допущение, что сопротивление щеточного контакта не зависит от плотности тока. Может быть предложена и другая методика анализа коммутации, при которой пренебрегается влиянием щеточного контакта. Действительно, проведенные эксперименты показывают, что в крупных машинах при удовлетворительной коммутации разница в падениях напряжения и 1 – i 1 r 1 и u 2 = i 2 r 2 в щеточном контакте составляет менее 0,5 В, в то время как э.д.с. е к превышает 3–4 В, достигая в отдельных случаях 8–10 В. Поэтому предложенное в рассматриваемой методике допущение является вполне обоснованным и основное уравнение коммутации (2.19а) может быть записано в виде
ep + eK = i1 r1 – i2 r2 » 0. (2.26)
Подставляя в уравнение (10.26) значение реактивной э.д.с. ер = – L р di/ dt и решая его относительно i, получим
 . (2.27)
. (2.27)
Следовательно, величина и характер изменения тока i вкоммутируемой секции в основном определяются коммутирующей э.д.с.
Условием безыскровой коммутации, как и в предыдущем случае, является выход сбегающей коллекторной пластины из-под щетки без разрыва тока, для чего необходимо, чтобы (i 1 )t= T к = 0 или (i )t= T к = – ia
Согласно теореме о среднем из (2.27) имеем
![]() . (2.27а)
. (2.27а)
Постоянную интегрирования С находим из начальных условий. Так как в начальный момент при t = 0 ток коммутации ( i) t= 0 = ia , то согласно (2.27) получим C = ia . Положив ( i) t= Tк = – ia , найдем условие безыскровой коммутации:
![]() , (2.28)
, (2.28)
Откуда
![]() . (2.29)
. (2.29)
Таким образом, для осуществления безыскровой коммутации необходима компенсация среднего значения реактивной э.д.с. в процессе коммутации. Если внешнее поле сделать постоянным, т.е. е к = е к-ср , то
 . (2.30)
. (2.30)
Следовательно, в этом, практически важном, простейшем случае обе методики дают тождественные результаты.
В расчетной практике для определения среднего значения реактивной э.д.с. в секции обмотки якоря часто используют упрощенную формулу, которая может быть получена из (2.29). Для этого ток параллельной ветви ia выражают через линейную нагрузку якоря
![]() ,
,
а период коммутации Т к – через линейную скорость якоря va и число коллекторных пластин K :
![]() . (2.31)
. (2.31)
В последних формулах N = 2 Kωc –число активных проводников обмотки якоря; Da и D к –диаметры якоря и коллектора; K -число коллекторных пластин; ωc –число витков в секции.
В результате получим реактивную э.д.с.
![]() . (2.32)
. (2.32)
Индуктивность секции
![]() , (2.33)
, (2.33)
где Λр –магнитная проводимость для потоков рассеяния секции: пазового Фп ; по лобовым частям Фs и дифференциального Фz (по коронкам зубцов) – рис. 2.32, а ; lа – li – активная длина якоря (при расчете магнитной проводимости берется удвоенная длина якоря); λ р –удельная магнитная проводимость на единицу длины секции.
Поэтому формула (2.32) принимает вид
ep = 2 la wc Ava λp . (2.32а)
Удельная проводимость секции с достаточной степенью точности может быть принята равной при открытых (рис. 2.32, б) и полузакрытых (рис. 2.32, в) пазах:
 , (2.34)
, (2.34)
где h п и b п – высота и средняя ширина паза; h ш и b ш –высота и ширина щели паза; ls – длина лобовой части секции.
Обычно значения λр = 4 ÷ 8.
На рис. 2.33, а показаны зависимости изменения тока в коммутируемой секции во времени при пренебрежении падениями напряжения i 1 r 1 и i 2 r 2 в щеточном контакте. Идеальной прямолинейной коммутации, т.е. условию e р.ср + е к.ср = 0, соответствует прямая 1 .
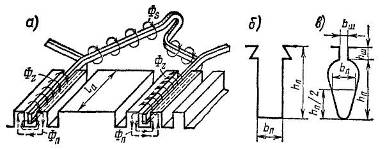
Рис. 2.32 – Потоки рассеяния секции (а) и размеры паза, определяющие удельную проводимость секции (б, в)
В действительности при работе машины всегда имеются причины, вызывающие неполную компенсацию реактивной э.д.с., т.е. отклонение от условия е р.ср + е к.ср = 0. К этим причинам относятся: технологические допуски при изготовлении коллектора, установке щеткодержателей, установке добавочных полюсов и т.п.; резкие толчки тока нагрузки, перегрузки по току, превышения номинальной частоты вращения, вибрация машины и другие эксплуатационные причины; нестабильность щеточного контакта, из-за которой постоянно изменяется площадь контакта щетки с коллектором (период коммутации Т к ) или происходит полный отрыв щетки от коллектора.
Если |е к.ср | < |е р.ср |, то коммутация замедляется, так как согласно правилу Ленца э.д.с. е р замедляет изменение тока i. Обозначив степень некомпенсации э.д.с. через Δ = [|е р.ср | – |е к.ср |]/e p.ср |, получим
![]() . (2.35)
. (2.35)
При этом закон изменения тока в коммутируемой секции [см. (2.30)]
 . (2.36)
. (2.36)
При замедленной коммутации (рис. 2.33, а , прямая 2) в момент окончания коммутации при t = T к щетка разрывает некоторый остаточный ток i ост , вследствие чего между сбегающим краем щетки и сбегающей коллекторной пластиной возникает электрическая дуга. Величина остаточного тока
![]() , (2.37)
, (2.37)
или с учетом (2.36)
![]() . (2.37a)
. (2.37a)
Электромагнитная энергия W и , выделяющаяся в дуге, возникающей при разрыве остаточного тока, может характеризовать степень искрения. Для рассматриваемого простейшего случая
![]() . (2.38)
. (2.38)
Рис. 2.33 – Кривые изменения тока в коммутируемой секции в течение периода коммутации Тк при пренебрежении сопротивлением щеточного контакта (а) и его учете (б, в)
При ускоренной коммутации (рис. 2.33, а, прямая 3), когда |е к.ср | > |е р.ср |, ток в коммутируемой секции изменяется по закону
 , (2.36а)
, (2.36а)
т.е. быстрее, чем это требуется для безыскровой работы щеток. Сбегающий край щетки и при ускоренной коммутации разрывает остаточный ток i ост , а следовательно, и в этом случае будет наблюдаться искрение щетками.
Учет падения напряжения в щеточном контакте.
При построении кривых изменения тока (рис. 2.33, а ) не учитывалось падение напряжения в щеточном контакте. В действительности при быстром увеличении плотности тока под сбегающим краем щетки сопротивление щеточного контакта резко возрастает, что ведет к уменьшению остаточного тока или полному его устранению, даже в том случае, когда коммутация отличается от идеальной. Типичные кривые изменения тока в коммутируемой секции с учетом влияния сопротивления щеточного контакта приведены на рис. 2.33, б . При незначительном расстройстве коммутации замедление коммутации (кривая 2 ) или ее ускорение (кривая 4 ) не приводят к разрыву сбегающим краем щетки остаточного тока. Только значительное замедление (кривая 3 ) или значительное ускорение (кривая 5 ) коммутации приводят к возникновению опасного искрения.
При замедленной коммутации уменьшение остаточного тока происходит под действием разности падений напряжений u 1 и u 2 (см. рис. 2.30) под сбегающим и набегающим краями щетки:
![]() . (2.39)
. (2.39)
При ускоренной коммутации на завершающем этапе, когда ток изменяет свое направление, в уравнение (2.39) входит сумма падений напряжения
![]() . (2.39а)
. (2.39а)
При этом к концу процесса коммутации резко уменьшается ток i 1 , т.е. коммутируемая секция заканчивает коммутацию с так называемой ступенью малого тока (рис. 2.33, в ), при которой допустима большая разница между е р и е к . Поскольку в эксплуатации появление погрешности коммутации как в одну, как и в другую сторону (т.е. ускоренная и замедленная коммутация) равновероятно, при расчете и наладке машины предпочитают иметь слегка ускоренную коммутацию. Для того чтобы усилить благоприятные влияния падений напряжений u 1 + u 2 на процесс коммутации, в мощных машинах постоянного тока с затрудненной коммутацией применяют щетки с большим переходным сопротивлением, несмотря на то, что это увеличивает потери мощности в переходном контакте.
Закономерности коммутации, рассмотренные на простейшем примере, в основном сохраняются и для более сложных случаев, когда щетка перекрывает несколько коллекторных пластин и в пазу находится несколько секций. Однако имеются и некоторые отличия от простейшего случая.
Общий случай коммутации при ширине щетки, большей коллекторного деления и нескольких проводниках, лежащих в пазу. В общем случае, когда щетка 1 перекрывает несколько коллекторных пластин (рис. 2.34, а ), изменение тока происходит одновременно в нескольких секциях 2 , лежащих в одном или нескольких пазах. На рис. 2.34, б изображена диаграмма коммутации секций одного паза для обмотки, показанной на рис. 2.34, а . Прямоугольники 3 , 4 , 5 и 6 показывают распределение во времени индуктивностей L c секций, которые приняты равными их взаимоиндуктивностям М с . Ширина каждого прямоугольника равна периоду коммутации
![]() , (2.40)
, (2.40)
где γ = b щ /b к – коэффициент щеточного перекрытия (число коллекторных пластин, перекрываемых щеткой); b к = πD к /K -коллекторное деление–расстояние между серединами соседних коллекторных пластин.
Изменение токов i 1 , i 2 , i 3 и i 4 в рассматриваемых секциях происходит со сдвигом во времени
![]() . (2.41)
. (2.41)

Рис. 2.34 – Коммутация при перекрытии щеткой нескольких коллекторных пластин (а) и диаграмма коммутации секции одного паза (б)
Время коммутации всех и п секций, лежащих в каждом слое паза, при диаметральном шаге обмотки якоря
![]() . (2.42)
. (2.42)
Коммутация секций происходит в зоне коммутации, т.е. по дуге окружности якоря, в пределах которой перемещаются стороны секции, лежащие в пазах, во время коммутации. Ширину этой зоны b з.к (рис. 2.35, а ) можно получить, если умножить время Т п на окружную скорость якоря va :
![]() . (2.43)
. (2.43)
Ее можно также выразить через ширину щетки и коллекторное деление:
![]() . (2.43а)
. (2.43а)
Из рис. 2.34, б следует, что в рассматриваемом случае одновременно может происходить коммутация секций двух пазов: когда начинается коммутация секций любого n -го паза, продолжается коммутация секций предшествующего (п -1) – го паза; заканчивается же коммутация секций n -го паза, когда уже замкнуты накоротко некоторые секции (п + 1) – гопаза. Таким образом, при исследовании процесса изменения тока в любой коммутируемой секции нужно учитывать индуктивное влияние секций, расположенных в том же и в соседних пазах. Для каждой из коммутируемых секций можно написать уравнение
![]() , (2.44)
, (2.44)
где е к – коммутирующая э. д. с, создаваемая внешним полем (э.д.с. вращения); – L c di/ dt -э.д.с. самоиндукции, возникающая при изменении тока в секции (индуктируемая потоком рассеяния ФL , рис. 2.35, б); –∑M к di к / dt -э.д.с. взаимоиндукции, возникающие в рассматриваемой секции в результате влияния других коммутируемых секций (индуктируемые потоками взаимоиндукции Ф'м и Ф"м рис. 2.35, б ); М к – взаимоиндуктивность рассматриваемой секции с другой секцией, коммутируемой одновременно; i к –ток в секциях, коммутируемых одновременно; ∑ir – сумма падений напряжений в сопротивлениях коммутируемой секции.
Аналитическое решение уравнения (2.44) невозможно, так как входящие в него индуктивности и сопротивления являются нелинейными, а сопротивления r зависят, кроме того, от характера коммутации.
Рассмотрим процесс коммутации в общем виде и определим среднюю скорость изменения тока во всех секциях якоря. При этом воспользуемся следующими соображениями. За время, соответствующее повороту якоря на одно полюсное деление (рис. 2.35, а )
![]() ,
,
происходит изменение направления тока во всех секциях S = N /(2 ωc ) обмотки якоря, т.е. приращение тока в секциях
![]() .
.
Следовательно, средняя скорость изменения тока во всех секциях обмотки якоря
 . (2.45)
. (2.45)
Так как изменение тока в секциях происходит только в период коммутации, выражение (2.45) определяет среднюю скорость изменения тока во всех коммутируемых секциях машины. Однако при анализе коммутации обычно рассматривают секции, находящиеся в одной зоне коммутации b з.к , т.е. коммутируемые одной щеткой.
При этом условии
 . (2.45а)
. (2.45а)
Если принять скорость изменения тока в зоне коммутации постоянной, то постоянным будет и и полный ток, проходящий во всех секциях, которые расположены в этой зоне, вследствие чего поток взаимоиндукции Ф'м + Ф"м , замыкающийся через главные и добавочные полюсы (рис. 2.35, б), будет постоянным. При этом условии взаимоиндукция соседних пазов проявляется только при скорости изменения тока в коммутируемых секциях, отличной от средней. Индуктивность же, обусловленная потоками рассеяния ФL , сказывается при любой скорости изменения тока.
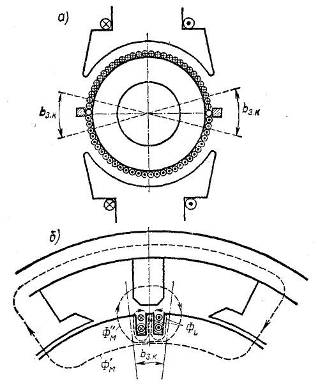
Рис. 2.35 – Положение коммутационной зоны (а) и магнитные потоки, создаваемые в ней коммутируемыми секциями (б)
Наличие сравнительно больших потоков взаимоиндукции Ф' м и Ф"м , обусловливает постоянство средней скорости изменения полного тока в зоне коммутации, так как при любом отклонении от этого закона в коммутируемых секциях индуктируется большая э.д.с. взаимоиндукции
 ,
,
стремящаяся ликвидировать указанное отклонение. Это теоретическое положение было впервые выдвинуто Л. Дрейфусом и в дальнейшем подтверждено подробными экспериментами Н.В. Волошина и В.Н. Безрученко.
В простейшем случае одновременной коммутации нескольких секций, каждая из которых занимает отдельный паз, для любой коммутируемой секции можно написать уравнение
 , (2.46)
, (2.46)
где L c –индуктивность, обусловленная потоком рассеяния ФL секции; М к – взаимоиндуктивность, обусловленная суммарным потоком взаимоиндукции Ф'м + Ф"м или с учетом (2.45а)
 . (2.46а)
. (2.46а)
Суммируя уравнения для всех коммутируемых секций и пренебрегая разностью падений напряжений под щеткой, получим
 , (2.47)
, (2.47)
где ∑е к = е к1 + е к2 + е к3 + · · · е кn , n– одно из целых чисел, ближайших к числу γ коллекторных пластин, перекрываемых щеткой.
Примем е к1 = е к2 = е к3 = · · · = е кn = е к.ср и усредним число коротко-замкнутых секций. Тогда, полагая п = γ, запишем:
 . (2.47а)
. (2.47а)
Поскольку проводимость для суммарного потока взаимоиндукции Ф'м + Ф"м во много раз больше проводимости для потока рассеяния ФL , т.е. M к >> L с , и практически, как показали экспериментальные исследования, d ∑i к /dt = Avа /ωс =const, получим
![]() , (2.47б)
, (2.47б)
Откуда
![]() . (2.48)
. (2.48)
Сравнивая выражения (2.48) и (2.32), можно установить, что перекрытие щеткой нескольких коллекторных пластин уменьшает величину ек .ср . Это объясняется тем, что увеличивается период коммутации T к = γπDa /(K va ), а следовательно, снижается средняя величина реактивной э.д.с.
![]() . (2.49)
. (2.49)
Таким образом, и для рассмотренного случая условие безыскровой коммутации будет иметь вид е р.ср + е к.ср . = 0. При выполнении его ток в секции за период коммутации изменяется на величину
 , (2.50)
, (2.50)
и коллекторная пластина выходит из-под щетки без разрыва тока. Такую коммутацию называют среднепрямолинейной.
В каждом слое паза якоря реальной машины находится несколько секций, что дает возможность выполнять для них общую изоляцию относительно корпуса, а это увеличивает коэффициент заполнения паза медью и значительно снижает габариты машины и ее стоимость. Секции, расположенные в одних и тех же пазах, имеют хорошую магнитную связь; индуктивность их L c приблизительно равна взаимоиндуктивности М п . Поэтому выход из-под щетки коллекторных пластин, связанных со всеми секциями паза, кроме последней, не вызывает электрической дуги даже при разрыве тока, так как малы переходная индуктивность и энергия, выделяющаяся в дуге. Это явление хорошо известно и в практике эксплуатации коллекторных машин – подгорают пластины коллектора, кратные числу секций в пазу. По указанной причине некоторые исследователи коммутации предлагали последнюю секцию в пазу называть самостоятельной, а те секции, которые не вызывают искрения, – несамостоятельными. Следовательно, при расчете коммутации следует стремиться к тому, чтобы не рвался ток при выходе из-под щетки пластины, связанной с самостоятельной секцией, т.е. заканчивающей коммутацию в пазу.
Для каждой из коммутируемых секций, лежащих в одном слое рассматриваемого паза, можно написать уравнение
 , (2.51)
, (2.51)
где М п –взаимоиндуктивность рассматриваемой секции с другими коммутируемыми секциями, лежащими в одном и том же слое данного паза; М к –взаимоиндуктивность рассматриваемой секции с другими коммутируемыми секциями, лежащими в соседних пазах. Так как L c = M n ,то
 . (2.51а)
. (2.51а)
Обозначая полный ток во всех секциях, лежащих в каждом слое, через i п = i 1 + i 2 + · · · + in получаем
 . (2.52)
. (2.52)
Уравнение (2.52) по форме соответствует уравнению (2.46а), т.е. коммутацию нескольких секций, лежащих рядом в одном пазу, можно рассматривать как коммутацию одной секции, имеющей начальный ток i п в течение времени Т п .
Средняя величина реактивной э.д.с. при коммутации всех секций, лежащих в каждом слое паза, с учетом (2.42):
![]() . (2.53)
. (2.53)
Соответственно из условия е р.ср + е к.ср = 0 должна выбираться и средняя величина коммутирующей э.д.с.
Обычно γ < u п , что обусловливает некоторые особенности коммутации. Типичная диаграмма изменения тока паза in при коммутации показана на рис. 2.36, а. На первом этапе, когда начинается коммутация секций n-го паза, продолжается коммутация секций предшествующего (n -1) – го паза.
Из условия средне прямолинейной коммутации имеем
Рис. 2.36 – График изменения тока паза (а) и распределение тока между отдельными секциями паза (б) в процессе коммутации:
1 – 4 – токи в сторонах секций верхнего слоя паза,
5 -8 – то же, нижнего слоя паза
![]() , (2.54)
, (2.54)
Поэтому
![]() . (2.54а)
. (2.54а)
Иными словами, наличие коммутирующих секций в предшествующем пазу уменьшает скорость изменения тока в секциях рассматриваемого паза. В течение времени Т' п , когда происходит коммутация секции только n -го паза, скорость изменения тока i п максимальна и равна ( di п /dt) n = A vа /ω с .
Когда начинается процесс коммутации в секциях последующего (n +1) – го паза, скорость изменения тока снова замедляется:
![]() (2.54б)
(2.54б)
Токи между пазами, в которых находятся коммутируемые секции, распределяются соответственно величинам коммутирующих э.д. с. и количеству секций, находящихся в режиме коммутации. Распределение токов между короткозамкнутыми секциями одного паза определяется в основном их активными сопротивлениями, включая сопротивление щеточного контакта. Оно носит в значительной мере случайный характер (рис. 2.36, б), что объясняется нестабильностью щеточного контакта.
В рассматриваемом случае величина остаточного тока, возникающего при нарушениях коммутации,
![]() ,
,
а электромагнитная энергия, выделяющаяся на дуге при искрении, связанном с разрывом остаточного тока,
![]() .
.
Способы улучшения коммутации. В современных машинах основным средством улучшения коммутации является применение добавочных полюсов, при помощи которых в коммутационной зоне создается магнитное поле, индуктирующее коммутирующую э.д.с. е к. ср требуемой величины. Только в машинах малой мощности (менее 300 Вт) удается обойтись без добавочных полюсов.
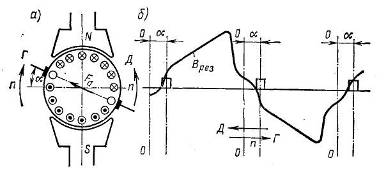
Рис. 2.37 – Сдвиг щеток с геометрической нейтрали (а) и кривая результирующего магнитного поля в зоне установки щеток (б)
Создание коммутирующей э.д.с. путем сдвига щеток с геометрической нейтрали 0 –0 на некоторый угол αза физическую нейтраль (рис. 2.37), так чтобы коммутируемые секции оказались в зоне действия магнитного поля с индукцией В рез требуемой величины и направления, применяется крайне редко. В этом случае удается добиться безыскровой работы машины только для одного направления вращения и при одной определенной нагрузке. Изменять же сдвиг щеток в зависимости от направления вращения и режима работы машины практически очень сложно.
Добавочные полюсы устанавливают между главными полюсами (рис. 2.38). Они создают в зоне коммутации магнитное поле с индукцией В к такой величины, чтобы при вращении якоря в коммутируемых секциях индуктировалась э.д.с. е к.ср = – е р.ср .
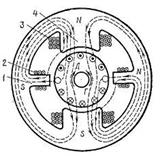
Рис. 2.38 – Расположение добавочных полюсов в машине:
1 – добавочные полюсы, 2 – обмотка добавочных полюсов, 3 – обмотка возбуждения, 4 – главные полюсы
Обмотку добавочных полюсов включают последовательно в цепь якоря, а магнитную систему выполняют ненасыщенной. Поэтому коммутирующая э.д.с. ек.ср оказывается пропорциональной току якоря и его линейной скорости va , которая в свою очередь пропорциональна частоте вращения:
![]() . (2.55)
. (2.55)
Следовательно, э.д. с. е к.ср изменяется по такому же закону, как и реактивная э.д. с:
![]() . (2.56)
. (2.56)
Поэтому если осуществить взаимную компенсацию э.д.с. е р.ср + е к.ср = 0 для какого-то одного режима работы, то их компенсация автоматически обеспечивается и при других режимах. Полярность добавочных полюсов зависит от направления вращения и режима работы машины. В генераторном режиме полярность добавочного полюса должна быть такой же, как у следующего за ним по направлению вращения главного полюса; в двигательном режиме – как у предшествующего ему по направлению вращения главного полюса.
Сердечники добавочных полюсов изготовляют обычно массивными из стальной поковки, хотя иногда применяют и шихтованные, из листов электротехнической стали. Последнее делается в тех случаях, когда в токе якоря имеются переменные составляющие (двигатели пульсирующего тока и т.д.), для того чтобы и э.д.с. е к тоже имела переменные составляющие, пропорциональные току якоря.
Величина индукции В к под добавочным полюсом обычно мала, так как мала и средняя величина коммутирующей э.д.с. – е к .ср =3 ÷ 10 В. Однако м.д.с. обмотки добавочных полюсов должна быть очень большой, так как она направлена против поперечной составляющей Fa q = τA м.д.с. реакции якоря. Поэтому обмотка каждого полюса должна иметь м.д.с.
![]() , (2.57)
, (2.57)
где В к –индукция в воздушном зазоре под добавочными полюсами, которая вычисляется по (2.55) при условии |е к.ср |; = |е р.ср |; δдоб и kδдоб –величина и коэффициент воздушного зазора под добавочными полюсами.
При расчете м.д.с. добавочных полюсов обычно не учитывается возможность получения несколько ускоренной коммутации, так как требуемое ускорение достигается регулировкой воздушного зазора при наладке машины.
Из-за значительной величины м. д. с. F д o6 поток рассеяния добавочного полюса очень велик и превышает в 2–4 раза полезный поток, замыкающийся через якорь. Для уменьшения потока рассеяния, который может вызвать насыщение сердечника добавочного полюса, в крупных машинах делают второй зазор δдоб2 (рис. 2.39, а), устанавливая диамагнитные прокладки между сердечником полюса и ярмом. В этом случае
![]() , (2.58)
, (2.58)
где B к1 и В к2 –индукции в основном и втором зазорах; k δдоб1 – соответствующий коэффициент воздушного зазора; δдоб1 и δдоб2 –величины этих зазоров.
При наличии компенсационной обмотки требуемая м.д.с. добавочного полюса резко уменьшается, так как м. д. с. компенсационной обмотки F к.о действует против м.д.с. Faq реакции якоря:
![]() . (2.58а)
. (2.58а)
Это позволяет (для уменьшения потоков рассеяния) сосредоточить обмотку добавочного полюса у якоря (рис. 2.39, б). Ширину наконечника добавочного полюса в малых машинах выбирают равной ширине зоны коммутации: b доб ≈ b з.к .
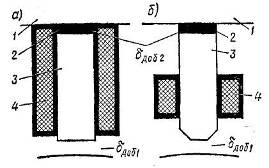
Рис. 2.39 – Формы сердечников и расположение на них катушек обмотки добавочных полюсов:
1-корпус (станина), 2 – диамагнитная прокладка,
3 – сердечник, 4 – катушка
В крупных машинах с напряженной коммутацией ширину наконечника добавочного полюса выбирают относительно узкой: b доб = (0,3 ÷ 0,6) b з.к – При такой ширине добавочного полюса распределение индукции в зоне коммутации имеет вид, показанный на рис. 2.40, вследствие чего коммутирующая э.д.с. в начале зоны коммутации и в конце значительно ниже среднего значения. Это приводит к тому, что первая секция паза вступает в коммутацию, а последняя секция выходит из нее со «ступенью малого тока» (см. рис. 2.33, в), что благоприятно сказывается на коммутации, так как предотвращает разрыв тока при случайном нарушении контакта между пластиной и сбегающим краем щетки. Узкие добавочные полюсы требуют повышенной точности сборки машины и установки щеток, поэтому в машинах малой и средней мощности их не применяют.
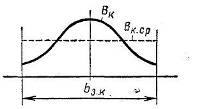
Рис. 2.40 – Кривая распределения индукции в воздушном зазоре под добавочным полюсом при узком полюсном наконечнике
Необходимость обеспечения удовлетворительной коммутации накладывает определенные ограничения на габаритные размеры и конструкцию машин постоянного тока. Практика электромашиностроения показывает, что можно добиться безыскровой коммутации лишь тогда, когда реактивная э.д. с. в номинальном режиме не превосходит некоторого предельного значения. Поэтому в крупных машинах и машинах, работающих при высоких частотах вращения, применяют одновитковые секции и делают неглубокие пазы (не более 4–6 см в самых мощных машинах) с целью уменьшения индуктивности секции. В ряде случаев для уменьшения реактивной э.д.с. приходиться ограничивать активную длину якоря и его окружную скорость. Все эти меры приводят либо к снижению мощности машины при заданных габаритах, либо к увеличению ее размеров и массы (при заданной мощности). Поэтому машины постоянного тока имеют меньшую мощность, чем машины переменного тока тех же габаритов; при мощности 100–1000 кВт уменьшение составляет 20–25%. Попытки увеличить мощность, допустив увеличение степени искрения на коллекторе, приводят к резкому возрастанию эксплуатационных расходов. Условия коммутации ограничивают также предельную мощность, на которую может быть построена машина постоянного тока (при заданной частоте вращения).
Чтобы уменьшить влияние технологических отклонений и вибраций щеток на качество коммутации, применяют обмотки с укороченным шагом и ступенчатые обмотки. В этих обмотках последняя секция паза одного слоя, заканчивая коммутацию, оказывается магнитно связанной с секцией другого слоя, которая остается замкнутой щеткой. Вследствие этого под щеткой выделяется только часть электромагнитной энергии остаточного тока
![]() , (2.59)
, (2.59)
а другая часть энергии
![]() (2.59а)
(2.59а)
передается в короткозамкнутую секцию.
Поскольку технологические отклонения равновероятны в ту и другую стороны, недокомпенсация реактивной э.д.с. е р.ср сменяется перекомпенсацией и поэтому накопления энергии W и не происходит. Коэффициент связи k св =M с /L c у секций с укороченным шагом достигает значения k св = 0,4 ÷ 0,6 (с учетом взаимной связи лобовых соединений), благодаря чему существенно уменьшается искрение под щетками. Однако при длительных нарушениях коммутации, когда погрешность Δ = [|е р.ср | – |е к.ср |/|е р.ср | имеет один знак для трех-пяти пазов, последовательно заканчивающих коммутацию, взаимоиндуктивность указанных секций не имеет значения, так как коммутация секций одного паза не может улучшаться за счет коммутаций секций другого паза (если секции всех пазов коммутируют в одинаковых условиях). Преимуществом ступенчатых обмоток является также и то обстоятельство, что при их использовании происходит более равномерный износ коллектора, так как в пазу имеются две самостоятельные секции, а следовательно, и электромагнитная энергия, выделяющаяся при разрыве остаточного тока паза распределяется на две коллекторные пластины (соответственно уменьшается их износ). Недостатком ступенчатых обмоток является сложность обеспечения «темной» коммутации, так как условия коммутации двух самостоятельных секций требуют, в общем случае, различной величины коммутирующей э.д.с. Таким образом, ступенчатые обмотки можно рекомендовать только при очень сложных условиях эксплуатации, характеризующихся работой с частыми нарушениями коммутации (толчкообразная нагрузка и т.д.).
Заметное улучшение коммутации происходит также из-за возникновения в проводниках обмотки якоря вихревых и контурных (в сложных обмотках) токов. Часть нескомпенсированной энергии коммутируемых секций выделяется в виде тепла, создаваемого вихревыми токами, что должно быть учтено при расчете, путем уменьшения результирующей индуктивности секции.
Уменьшению искрения способствует увеличение длины коллектора, однако это ведет к увеличению габаритов и длины машины. Плотность тока под щетками не играет существенного значения, однако не следует выбирать ее чрезмерной, так как при перегрузках возможен перегрев отдельных коллекторных пластин. Особенно опасно это явление для двигателей постоянного тока, работающих в условиях затяжных пусков (например, для тяговых двигателей электровозов, экскаваторов и т.п.). Во избежание перегрева отдельных пластин и возникновения деформации коллектора плотность тока под щетками при длительных перегрузках таких машин не должна превышать 20 А/см2 .
Важную роль в процессе коммутации играют щетки, которые по своей физической природе являются нелинейными сопротивлениями. При быстром увеличении плотности тока под сбегающим краем щетки сопротивление щетки резко возрастает, что ведет к уменьшению остаточного тока или полному его устранению, даже в случае, когда коммутация является неидеальной. В электрических машинах большой и средней мощностей применяют электрографитированные щетки с большим падением напряжения в скользящем контакте (2,4–3,5 В на пару щеток). Такие щетки получают в электропечах путем нагревания заготовок из угля и кокса до температуры 2000–2500° С, при этом они принимают структуру графита, а поэтому называются электрографитированными. На рис. 2.41 показаны типичные зависимости падения напряжения 2Δи щ в контакте «коллектор – щетка» от плотности тока Δщ для электрографитированных (кривая 1 ) и угольно-графитных (кривая 2) щеток. Соответствующим выбором марки щетки часто удается улучшить коммутацию машины. В тихоходных машинах применяют твердые щетки с наибольшим переходным сопротивлением. Для быстроходных машин (при линейной скорости 40 м/с и выше) приходится брать мягкие щетки, хотя они быстрее изнашиваются и имеют меньшее переходное сопротивление.
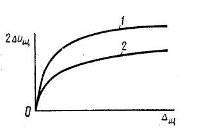
Рис. 2.41 – Зависимости падения, напряжения под щетками от плотности тока
Таблица 2.2
| Типы щеток | Марка | Номинальная плотность тока, А/см2 | Переходное падение напряжения на пару щеток, В | Окружная скорость, м/с | Удельное нажатие, Н/см2 | Коэффициент трения | Область применения |
| Угольно-графитные | УГ4 | 7 | 2 | 12 | 2–2,5 | 0,25 | Для генераторов и двигателей со средними условиями коммутации |
| Графитные | 611М | 10–12 | 2 | 40 | 2 – 2,5 | 0,25 | Для генераторов и двигателей с облегченными условиями коммутации |
| Элек-трогра-фитиро-ванные | ЭГ2А ЭГ4 ЭГ8 ЭГ14 |
10 12 10 10–11 |
2,6 2 2,4 2,5 |
45 40 40 40 |
2–2,5 1,5–2 2–4 2–4 |
0,23 0,25 0,25 0,25 |
Для генераторов и двигателей со средними и затрудненными условиями коммутации |
| Медно-графит-ные | МГ2 МГ4 | 20 15 |
0,5 1,1 |
20 20 |
1,8–2,3 2–2,5 |
0,2 0,2 |
Для низковольтных генераторов и контактных колец |
Технические данные наиболее часто используемых марок щеток и области их применения приведены в табл. 2.2. Подбор щеток обычно производится экспериментально.
На характер коммутации оказывает также влияние дифференциальный поток рассеяния, проходящий по коронкам зубцов, и поток главных полюсов.
Дифференциальный поток рассеяния по коронкам зубцов Фz (см. рис. 2.42, а )замыкается через сердечник добавочного полюса. При вращении якоря изменяется положение середины паза с коммутируемыми секциями относительно сердечника (см. положения паза, показанные на рис. 2.42, а, б ), что приводит к изменению потока Фz и периодическому изменению индуктивности секции L c .
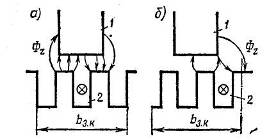
Рис. 2.42 – Изменение дифференциального потока рассеяния, проходящего по коронкам зубов, при перемещении паза с коммутируемыми секциями:
1 – сердечник добавочного полюса, 2 – паз
Величина реактивной э.д.с. будет при этом определяться выражением
![]() (2.60)
(2.60)
и может существенно отличаться от средней э.д.с. е р.ср . В результате возникает искрение под щетками. Для уменьшения дифференциального потока рассеяния целесообразно увеличивать зазор под добавочным полюсом. В машинах большой мощности этот зазор обычно делают равным 8 – 15 мм, соответственно увеличивая число витков обмотки добавочных полюсов. Иногда, для того чтобы уменьшить скорость изменения потока Фz ,на наконечники дополнительных полюсов устанавливают короткозамкнутые витки. Такой виток выполняют из меди или бронзы в виде фланца; он одновременно служит конструктивной деталью, крепящей катушку добавочного полюса. Однако, улучшая коммутацию в стационарных режимах, короткозамкнутые витки будут ухудшать коммутацию при резких изменениях тока якоря.
Влияние главных полюсов на процесс коммутации заключается в том, что поток Фв , созданный обмоткой возбуждения, частично попадает в зону коммутации. При симметричной магнитной системе и чередующейся полярности главных полюсов, как это обычно имеет место, величина результирующего потока в зоне коммутации не изменяется, т.е. сохраняется условие е р.ср + е к .ср = 0. Однако поле в зоне коммутации деформируется, усиливаясь, с одной стороны, и уменьшаясь, с другой. На рис. 2.43 показано распределение индукции В к в зоне коммутации: а – созданной м.д. с. F д o6 добавочных полюсов; б – созданной м.д.с. F в главных полюсов; в- результирующего магнитного поля. Нарушение симметрии магнитного поля в зоне коммутации приводит к неблагоприятному характеру коммутации; при этом токосъем переносится на край щетки[3] .
Еще большие расстройства коммутации могут возникнуть из-за нарушения магнитной симметрии машины, например, в результате технологических отклонений при установке щеткодержателей, главных или добавочных полюсов, когда изменяется поле в зоне коммутации. Чтобы уменьшить влияние поля главных полюсов на процесс коммутации, снижают величину полюсного перекрытия αi = b i /τ, так чтобы соблюдалось условие (1–αi )τ ≥ 2,5b з.к В машинах малой мощности, кроме того, увеличивают ширину наконечника добавочного полюса, который «экранирует» зону коммутации от потока главного полюса.
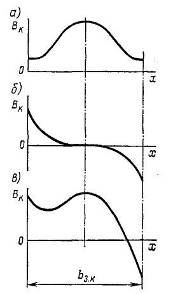
Рис. 2.43 – Распределение индукции Вк в зоне коммутации
В машинах с компенсационной обмоткой м.д. с. главных полюсов меньше, а следовательно, влияние поля главных полюсов на процесс коммутации меньше. Это позволяет несколько увеличивать полюсную дугу, т.е. коэффициент полюсного перекрытия αi .
Особенно велико влияние поля главных полюсов на коммутацию в машинах с несимметричной магнитной системой и в машинах с расщепленными полюсами. При этом изменение потока возбуждения приводит к изменению результирующего потока в коммутационной зоне, а следовательно, и к изменению среднего значения коммутирующей э.д.с. Это обстоятельство затрудняет создание мощных машин с расщепленными полюсами (электромашинных усилителей и регулируемых одноякорных преобразователей).
Оценка коммутационной напряженности машины. Качество коммутации проверяется визуально или при помощи специальных приборов (индикаторов искрения) во время контрольных стендовых испытаний. Однако часто, чтобы составить прогноз работы машины в эксплуатации, необходимо оценить напряженность коммутации теоретически. Такая необходимость возникает как при проектировании машины, так и при выборе типа машины для определенного технологического процесса, характеризующегося величиной и частотой перегрузок, вибрациями машины, частотой пусков, реверсов и т.д.
Наиболее распространенным критерием напряженности коммутации является средняя величина реактивной э. д. с, так как искрение возникает из-за неполной ее компенсации. Однако вполне определенного допускаемого значения реактивной э.д.с. установить не удалось, и различные заводы и фирмы придерживаются своих норм, ограничивая значение этой э.д. с. 3–10 В. Так, например, по рекомендациям завода «Электросила» в машинах большой мощности с петлевой и лягушачьей обмотками реактивная э.д.с. е р.ср при номинальной нагрузке не должна превосходить 7–10 В (меньшие значения относятся к быстроходным машинам с n ≥ 3000 об/мин). При волновых обмотках, которые применяют в машинах с током до 400 А и в тихоходных машинах с большим числом полюсов, реактивная э.д. с. не должна превышать 5 В. В машинах средней мощности с диаметром якоря до 30 см, в которых обычно применяют волновые обмотки с несколькими витками в секциях, значение е р. ср должно быть не более 2,5 – 3 В.
Другой критерий основан на определении величины электромагнитной энергии или мощности, выделяющейся под краем щетки при искрении в процессе коммутации. Электромагнитная энергия, выделяющаяся в возникающей дуге при разрыве остаточного тока i ост = 2i п Δ = 2u п Ia Δ,
![]() , (2.46)
, (2.46)
где
 –
–
степень некомпенсации реактивной э.д.с.
Соответствующая мощность, выделяющаяся под краем щетки при искрении и постоянно действующем расстройстве коммутации,
Pa = mWv , (2.62)
где m – число разрывов остаточного тока в секунду.
Так как искрение возникает при коммутации тока в каждой последней секции паза, то каждый разрыв остаточного тока соответствует перемещению коллектора на u п коллекторных делений. Следовательно,
![]()
![]() .
.
При этом мощность
 . (2.62а)
. (2.62а)
Величина![]() представляет собой реактивную э.д.с. е
р
, вычисленную в предположении, что щетка перекрывает одну коллекторную пластину, (по формуле 2.32а), поэтому
представляет собой реактивную э.д.с. е
р
, вычисленную в предположении, что щетка перекрывает одну коллекторную пластину, (по формуле 2.32а), поэтому
![]() , (2.62б)
, (2.62б)
где i п = u п ia – полный ток во всех секциях, лежащих в каждом слое паза.
Таким образом, при заданных технологии и условиях эксплуатации мощность, выделяющаяся под щеткой при искрении, зависит от полного тока паза 2i п и величины реактивной э. д. с, вычисленной в предположении, что b щ = t к .
Для более полной оценки напряженности коммутации по величине мощности, выделяющейся под щеткой при искрении, необходимо учитывать коммутационные свойства самих щеток. При расстройстве коммутации и применении электрографитированных, графитовых и угольно-графитных щеток искрение возникает равномерно по всей длине коллекторных пластин (при искрении коллекторные пластины обычно имеют по всей длине равномерный подгар с одного края), в результате чего происходит равномерная эрозия щеток и коллекторных пластин. Износ щетки будет зависеть от удельной мощности, выделяющейся на единице длины края щетки:
 . (2.63)
. (2.63)
При этом k щ = i п e р.п /l щ является мерой оценки коммутационной напряженности машины. Обычно коммутация машины не вызывает затруднений, если k щ < 500 Вт/см. В общем случае величина k щ должна уточняться для каждого типа машины, исходя из особенностей ее технологии изготовления и условий эксплуатации. При этом должно учитываться демпфирующее действие вихревых токов в проводниках якоря, особенно заметное в машинах большой мощности.
Проведенные исследования показали, что если удельная мощность р и.уд , выделяющаяся под краем щетки, менее 1 Вт/см, то современные электрографитированные щетки уменьшают остаточный ток настолько, что искрения совершенно не наблюдается, т.е. для безыскровой коммутации необходимо, чтобы
![]() Вт/см. (2.64)
Вт/см. (2.64)
Из (2.64) можно определить ориентировочную величину допустимой степени некомпенсации ![]()
Или
![]() . (2.65)
. (2.65)
Режимы, при которых Δпр% ≤ 1 ÷ 2%, неизбежно сопровождаются искрением под щетками. Интенсивность износа коллекторных пластин должна оцениваться величиной k к = ( k m / z) 2 р, так как искрение, повреждающее данную пластину, возникает при выходе пластины из-под каждого щеткодержателя, число которых обычно равно числу полюсов 2 р , а число искрящих пластин равно числу пазов z. Рекомендуется, чтобы предельно допустимая величина k к не превосходила 20 – 30 Вт/см (при этом не будет чрезмерного износа коллектора).
Экспериментальная проверка коммутации и настройка добавочных полюсов. Обычно машины постоянного тока при выпуске с завода проходят контрольные испытания, в которые входит и проверка качества коммутации (обычно визуальная). Головные образцы машин проходят более основательную проверку коммутации, в процессе которой путем изменения величины воздушных зазоров в магнитной цепи добавочных полюсов устанавливают оптимальную величину коммутирующей э.д.с.
Основным методом проверки и наладки коммутации является экспериментальное определение зоны безыскровой работы (путем подпитки обмотки добавочных полюсов). Для этой цели в обмотку добавочных полюсов от специального генератора (рис. 2.44) подают дополнительный ток ΔI (ток подпитки), вследствие чего изменяется ее м.д.с. F д o6 . При этом изменяются индукция В к в зоне коммутации и величина коммутирующей э.д.с. е к.ср . При проведении опыта, постепенно увеличивая м. д. с. добавочных полюсов, добиваются появления искрения под щетками и фиксируют ток подпитки +ΔI Затем изменяют направление тока подпитки и повторяют опыт, добиваясь снова появления искрения под щетками при токе – ΔI. Этот опыт проводят при постоянной частоте вращения n и различных значениях тока якоря. По полученным данным строят зону безыскровой работы машины (см. заштрихованную зону на рис. 2.45). Обычно при построении зоны безыскровой работы величину тока подпитки выражают в процентах от номинального тока якоря. Ширина зоны безыскровой работы характеризует устойчивость коммутации машины при случайных отклонениях условий коммутации от оптимальных, что всегда имеет место в эксплуатации. При номинальном режиме предельная допустимая неточность компенсации реактивной э.д.с. примерно равна половине ширины зоны безыскровой работы: Δпред% ≈ 0,5b в.ном% .
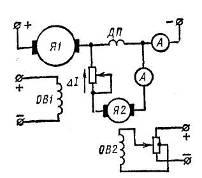
Рис. 2.44 – Схема экспериментальной установки для определения зоны безыскровой работы:
Я1 – якорь исследуемой машины: ОВ1 – ее обмотка возбуждения;
ДП – ее обмотка добавочных полюсов; Я2 – якорь вспомогательного генератора;
ОВ2 – его обмотка возбуждения
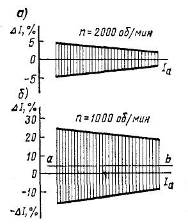
Рис. 2.45. Зоны безыскровой работы машины постоянного тока
Обычно добавочные полюсы настраивают так, чтобы середина зоны безыскровой работы соответствовала току подпитки, равному нулю. Этому режиму отвечает слегка ускоренная коммутация. Исключение составляют машины, работающие в широком диапазоне изменения частоты вращения. В этом случае также нужно настраивать добавочные полюсы по средней линии зоны безыскровой работы, но зону снимать при частоте вращения машины, близкой к максимальной (рис. 2.45, а). При такой настройке добавочных полюсов в области малых частот вращения машина будет недокоммутирована, т.е. поле в зоне коммутации будет слишком слабым (средняя линия ab зоны безыскровой работы на рис. 2.45, б лежит в области положительных значений тока подпитки ΔI ).
Это объясняется тем, что при снижении частоты вращения уменьшается абсолютное значение реактивной э.д.с. и увеличивается роль падения напряжения в переходном контакте между щеткой и коллектором, которое не зависит от частоты вращения. В результате резко расширяется область допустимой перекоммутации, т.е. можно было бы увеличить м. д. с. добавочных полюсов. Несоответствие м. д. с. добавочных полюсов оптимальному расположению зон безыскровой работы при малых частотах вращения не имеет практического значения, так как в рассматриваемых режимах машина менее нагружена в коммутационном отношении и имеет более устойчивую коммутацию, чем при большой частоте вращения[4] .
2.8 Генераторы постоянного тока
Свойства генераторов постоянного тока определяются в основном способом питания обмотки возбуждения. В зависимости от этого различают генераторы:
1) с независимым возбуждением–обмотка возбуждения получает питание от постороннего источника постоянного тока;
2) с параллельным возбуждением–обмотка возбуждения подключена к обмотке якоря параллельно нагрузке;
3) с последовательным возбуждением–обмотка возбуждения включена последовательно с обмоткой якоря и нагрузкой;
4) со смешанным возбуждением–имеются две обмотки возбуждения: одна подключена параллельно нагрузке, а другая – последовательно с нею.
Рассматриваемые генераторы имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки независимого и параллельного возбуждения, имеющие большое число витков, изготовляют из провода малого сечения, а обмотку последовательного возбуждения, имеющую небольшое число витков, – из провода большого сечения. Генераторы малой мощности иногда выполняют с постоянными магнитами. Свойства таких генераторов близки к свойствам генераторов с независимым возбуждением.
Генератор с независимым возбуждением. В этом генераторе (рис. 2.46) ток возбуждения I в не зависит от тока якоря Iа , который равен току нагрузки I н . Величина тока I в определяется только положением регулировочного реостата r р.в , включенного в цепь обмотки возбуждения:
![]() , (2.66)
, (2.66)
где U в – напряжение источника питания; r в – сопротивление обмотки возбуждения; rр.в- сопротивление регулировочного реостата.
Обычно ток возбуждения невелик и составляет 1–3% от номинального тока якоря.
Основными характеристиками, определяющими свойства генераторов постоянного тока, являются характеристики холостого хода, внешняя, регулировочная и нагрузочная.
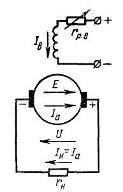
Рис. 2.46. Принципиальная схема генератора с независимым возбуждением
Характеристикой холостого хода (рис. 2.47, а) называют зависимость U 0 = f (I в ) при I н = 0 и n = const. При холостом ходе машины, когда цепь нагрузки разомкнута, напряжение U 0 на зажимах якоря равно э.д.с. Е = с е Фn.
Обычно частота вращения якоря n поддерживается неизменной и напряжение при холостом ходе зависит только от величины магнитного потока Ф, т.е. оттока возбуждения I в . Поэтому характеристика U 0 = f( I в ) подобна магнитной характеристике Ф = f( I в )
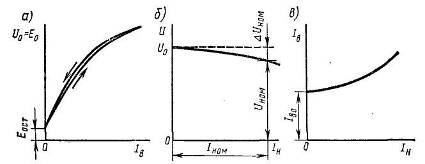
Рис. 2.47 – Характеристики генератора с независимым возбуждением
Характеристику холостого хода легко снять экспериментально. Вначале устанавливают ток возбуждения таким, чтобы U 0 ≈ 1,25U ном ; затем уменьшают ток возбуждения до нуля и снова увеличивают до прежнего значения. При этом получаются восходящая и нисходящая ветви характеристики, выходящие из одной точки. Расхождение этих ветвей объясняется наличием гистерезиса в магнитопроводе машины. При I в = 0 в обмотке якоря потоком остаточного магнетизма индуктируется остаточная э.д.с. Е ост , которая составляет 2–4% от U ном .
Внешней характеристикой (рис. 2.47, б ) называют зависимость U = = f( I н ) при n = const и I в = const. В режиме нагрузки напряжение генератора
![]() , (2.67)
, (2.67)
где ∑r – сумма сопротивлений всех обмоток, включенных последовательно в цепь якоря (якоря, добавочных полюсов и компенсационной).
С увеличением нагрузки напряжение U уменьшается по двум причинам:
а) из-за падения напряжения во внутреннем сопротивлении ∑r машины;
б) из-за уменьшения э.д.с. Е врезультате размагничивающего действия реакции якоря.
Изменение напряжения при переходе от режима номинальной нагрузки к режиму холостого хода
![]() . .
(2.68)
. .
(2.68)
Для генераторов с независимым возбуждением оно составляет 5–15%.
Регулировочной характеристикой (рис. 2.47, в ) называют зависимость I в = f (I н ) при U = const и n = const. Она показывает, каким образом следует регулировать ток возбуждения, чтобы поддержать постоянным напряжение генератора при изменении нагрузки. Очевидно, что в этом случае по мере роста нагрузки нужно увеличивать ток возбуждения.
Нагрузочной характеристикой (рис. 2.48, а ) называют зависимость U= f (I в )при n =const и I н = const. Нагрузочная характеристика при I н = I ном (кривая 2) проходит ниже характеристики холостого хода (кривая 1 ), которую можно рассматривать как частный случай нагрузочной характеристики при I н = 0. Разность ординат кривых 1 и 2 обусловлена размагничивающим действием реакции якоря и падением напряжения во внутреннем сопротивлении ∑r машины. Наглядное представление о влиянии этих факторов дает характеристический, или реактивный, треугольник ABC (рис. 2.48, а ). Если к отрезку аА, равному в определенном масштабе напряжению U при некотором токе нагрузки I н, и некотором токе возбуждения I в , прибавить отрезок АВ, равный в том же масштабе падению напряжения I a ∑r в генераторе, то получим отрезок аВ, равный э.д.с. Е. При холостом ходе такая э.д.с. индуктируется в обмотке якоря при меньшем токе I' в, соответствующем абсциссе точки С. Следовательно, отрезок ВС характеризует размагничивающее действие реакции якоря в масштабе тока возбуждения. При неизменном токе I н катет АВ характеристического треугольника является постоянным; катет ВС зависит не только от тока I н , но и от степени насыщения магнитной системы, т.е. от тока возбуждения I в . Однако в ряде случаев влиянием тока возбуждения пренебрегают и принимают, что отрезок ВС пропорционален только току I н .
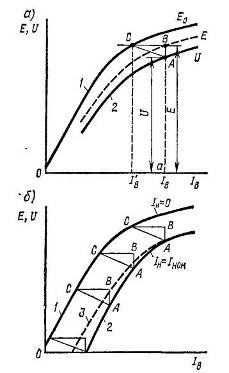
Рис. 2.48 – Нагрузочная характеристика генератора с независимым возбуждением (а) и ее построение с помощью реактивного треугольника (б)
Это позволяет строить нагрузочные характеристики при разных токах, изменяя лишь величину всех сторон треугольника ABC. Если вершину С характеристического треугольника, построенного для некоторого тока I н , совместить с характеристикой 1 холостого хода (рис. 2.48, б ),а затем перемещать треугольник по этой характеристике так, чтобы катет ВС оставался параллельным оси абсцисс, то след вершины А даст приближенно искомую нагрузочную характеристику 2 при заданной величине тока I н . Эта характеристика будет несколько отличаться от реальной характеристики 3 (которая может быть снята опытным путем), так как величина катета ВС характеристического треугольника будет изменяться вследствие изменения условий насыщения. Используя характеристику холостого хода, с помощью характеристического треугольника могут быть построены и другие характеристики генератора: внешняя и регулировочная.
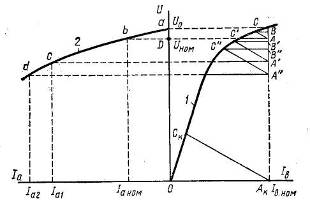
Рис. 2.49 – Построение внешней характеристики генератора с независимым возбуждением с помощью характеристического треугольника
Построение внешней характеристики. При построении исходят из характеристики холостого хода 1 (рис. 2.49). Взяв точку D на оси ординат, соответствующую номинальному напряжению U ном , проводят через нее прямую AD, параллельную оси абсцисс. На этой прямой располагают вершину А характеристического треугольника, снятого при номинальном токе якоря так, чтобы катет АВ был параллелен оси ординат, а вершина С находилась на характеристике 1. Затем, опустив перпендикуляр из вершины А на ось абсцисс, находят точку А к , соответствующую номинальному току возбуждения I в.ном .
При этом способе определения тока I в.ном исходят из того, что под действием реакции якоря э.д.с. при нагрузке будет меньше, чем при холостом ходе, т.е. будет создаваться как бы меньшим током возбуждения. Это уменьшение тока I в соответствует отрезку ВС, характеризующему размагничивающее действие реакции якоря. Напряжение при номинальном токе также будет меньше э.д.с. на величину падения напряжения Iа ∑r, которому соответствует катет АВ.
При построении искомой зависимости 2 напряжения U от тока нагрузки I = Iа ее точки могут быть легко определены: номинальному току Iа.ном отвечает номинальное напряжение U ном (точка b ), а режиму холостого хода (ток якоря равен нулю) – напряжение U 0 (точка а), равное э.д.с. при токе возбуждения I в.ном . Другие точки (с, d и т.д.) внешней характеристики можно построить, изменяя все стороны характеристического треугольника прямо пропорционально изменению тока якоря и располагая его так, чтобы катеты А'В' , А «В» и т.д. оставались параллельными оси ординат. При этом точки В, В' , В» и т.д. должны располагаться на вертикальной линии Ак В, соответствующей току возбуждения I в.ном , а точки С , С' , С» и т.д. на характеристике холостого хода. Тогда ординаты точек В', В» и т.д. будут определять величину напряжения при токах нагрузки I а1 = Iа ном А'В' /AB; Iа 2 =Iа ном А "В» /АВ и т.д.
Обычно при построении внешней характеристики 2 проводят только гипотенузы характеристических треугольников А'С', А «С» и т.д., параллельные АС, до пересечения с характеристикой холостого хода и с линией А к В, соответствующей току I в.ном . Ординаты найденных точек А', А» и т.д. дадут искомые величины напряжений (т.е. точки с, d и т.д. внешней характеристики 2), при токах нагрузки
![]() :
:![]() :
:![]() :···=АС:А'С':А «С»
: ··.
:···=АС:А'С':А «С»
: ··.
Если из точки А к , соответствующей I в.иом , провести прямую, параллельную АС, до пересечения с характеристикой холостого хода в точке С к , то получим величину тока короткого замыкания I к = I ном А к С к /АС, которая в 5–15 раз превосходит номинальный ток. Зная ток короткого замыкания, можно рассчитать максимальный момент и механическую прочность вала, выбрать аппаратуру защиты и т.д. Экспериментальное определение тока короткого замыкания затруднительно, так как в процессе проведения опыта может возникнуть круговой огонь.
Построенная характеристика является приближенной. Основная погрешность обусловлена тем, что размагничивающее действие реакции якоря (т.е. катет ВС) не пропорционально току якоря. Обычно приведенное построение дает несколько заниженное значение напряжения, а также тока короткого замыкания.
Построение регулировочной характеристики (рис. 2.50). Это построение начинают с того, что находят ток возбуждения, соответствующий номинальному напряжению при холостом ходе. Чтобы определить ток возбуждения при номинальном токе нагрузки, вершину А характеристического треугольника (соответствующего номинальной нагрузке) располагают на прямой 2, параллельной оси абсцисс и находящейся от нее на расстоянии U ном . Катет АВ должен быть параллелен оси ординат, а вершина С должна располагаться на характеристике холостого хода 1 . Абсцисса вершины А дает искомую величину тока возбуждения. Доказательство справедливости этого построения дано при построении внешней характеристики.
Проводя прямые, параллельные гипотенузе АС, получим отрезки А'С', А «С», А' «С'» и т.д., заключенные между характеристикой холостого хода 1 и прямой 2, соответствующей условию U =U ном = const. Эти отрезки представляют собой гипотенузы характеристических треугольников при других токах нагрузки. Искомая регулировочная характеристика I в = f (Iа ) – кривая 3 – построена в нижнем координатном углу. Значения тока возбуждения определяются абсциссами точек А, А', А» и т.д., которым соответствуют токи нагрузки, пропорциональные длинам отрезков АС, А'С', А «С» и т.д.
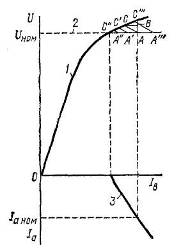
Рис. 2.50 – Построение регулировочной характеристики с помощью характеристического треугольника
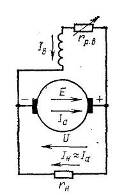
Рис. 2.51 – Принципиальная схема генератора с параллельным возбуждением
Достоинствами генераторов с независимым возбуждением являются возможность регулирования напряжения в широких пределах от нуля до U макс путем изменения тока возбуждения и сравнительно малое изменение напряжения генератора под нагрузкой. Однако такие генераторы требуют наличия внешнего источника постоянного тока для – питания обмотки возбуждения.
Генератор с параллельным возбуждением. В этом генераторе (рис. 2.51) обмотка возбуждения присоединена через регулировочный реостат параллельно нагрузке. Следовательно, в машине используется принцип самовозбуждения, при котором обмотка возбуждения получает питание непосредственно от самого генератора. Самовозбуждение генератора возможно только при выполнении определенных условий. Чтобы установить их, рассмотрим процесс изменения тока в контуре «обмотка возбуждения – якорь» при режиме холостого хода. Для рассматриваемого контура можно написать уравнение
e = iB RB + LB diB / dt, (2.69)
где е и i в –мгновенные значения э.д.с. Е в обмотке якоря и тока возбуждения I в ; R в = r в + r р.в –суммарное сопротивление цепи возбуждения генератора (сопротивлением ∑r можно пренебречь, так как оно значительно меньше R в ); L в –суммарная индуктивность обмоток возбуждения и якоря.
Все члены, входящие в (2.69), могут быть изображены графически. На рис. 2.52 показаны зависимость e = f( i в ), представляющая собой характеристику холостого хода генератора ОА, и вольт-амперная характеристика сопротивления его цепи возбуждения i в R в = = f( i в ). Последняя представляет собой прямую ОВ, проходящую через начало координат под углом у к оси абсцисс; при этом tgγ= R в . Из (2.69) имеем
diB /dt=(e-iB RB )/LB . (2.70)
Следовательно, если имеется положительная разность (е –i в r в ), то производная di в /dt > 0 и происходит процесс увеличения тока возбуждения i в . Установившийся режим в цепи обмотки возбуждения будет иметь место при di в /dt = 0, т.е. в точке С пересечения характеристики холостого хода 0А с прямой 0В. В этом режиме машина будет работать с некоторым установившимся током возбуждения I в0 и э.д.с. Е 0 = U 0 .
Из уравнения (2.70) следует, что для самовозбуждения генератора необходимо выполнение определенных условий.
1. Процесс самовозбуждения в генераторе может начаться только в том случае, если в начальный момент (i в = 0) в обмотке якоря индуктируется некоторая начальная э.д.с. е нач . Такая э.д.с. может быть создана потоком остаточного магнетизма. Поэтому для начала процесса самовозбуждения генератора необходимо, чтобы в машине имелся поток остаточного магнетизма, который при вращении якоря индуктирует в его обмотке э.д.с. Е ост . Обычно поток остаточного магнетизма имеется в машине из-за наличия гистерезиса в ее магнитной системе. Если такой поток отсутствует, то его создают, пропуская через обмотку возбуждения ток от постороннего источника.
2. При прохождении тока i в по обмотке возбуждения ее м. д. с. F в должна быть направлена согласно с м. д. с. остаточного магнетизма F ост . В этом случае под действием разности е –i в R в происходит процесс нарастания тока i в , магнитного потока возбуждения Фв и э.д.с. е. Если указанные м. д. с. направлены встречно, то м. д. с. обмотки возбуждения создает поток, направленный против потока остаточного магнетизма, машина размагничивается, и процесс самовозбуждения не сможет начаться.
3. Положительная разность е –i в R в , необходимая для возрастания тока возбуждения i в от нуля до установившегося значения I в0 , может иметь место только в том случае, если в указанном диапазоне изменения тока i в прямая ОВ располагается ниже характеристики холостого хода ОА.
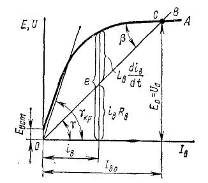
Рис. 2.52 – Характер изменения э.д.с. и тока возбуждения генератора в процессе самовозбуждения
При увеличении сопротивления цепи возбуждения Rв возрастает угол наклона у прямой ОВ к оси тока Iв и при некотором критическом значении этого угла γкр (соответствующем критическому значению сопротивления Rв.кр )прямая ОВ практически совпадет с прямолинейной частью характеристики холостого хода. В этом случае е ≈iв Rв и процесс самовозбуждения становится невозможным. Следовательно, для самовозбуждения генератора необходимо, чтобы сопротивление цепи возбуждения было меньше критического значения.
Если параметры цепи возбуждения подобраны так, что R в <. R в.кр ,то в точке С обеспечивается устойчивость режима самовозбуждения. При случайном уменьшении тока i в ниже установившегося значения I в0 или увеличении его свыше I в0 возникает соответственно положительная или отрицательная разность (е –i в R в ), стремящаяся изменить ток i в так, чтобы он снова стал равным I в0 . Однако при R в > R в.кр устойчивость режима самовозбуждения нарушается. Если в процессе работы генератора увеличить сопротивление цепи возбуждения R в до величины, большей R в.кр , то машина размагничивается и ее э. д. с. уменьшается до Е ост . Если же генератор начал работать при R в > R в.кр , то он не сможет самовозбудиться. Следовательно, условие R в < R в.кр ограничивает возможный диапазон регулирования тока возбуждения генератора, а следовательно, и его напряжения. Обычно уменьшать напряжение генератора путем увеличения сопротивления R в можно лишь до (0,6 ÷0,7) U ном .
Внешняя характеристика генератора представляет собой зависимость U = f( I в ) при n = const и R в = const (рис. 2.53, кривая 1). Она располагается ниже внешней характеристики генератора с независимым возбуждением (кривая 2 ). Объясняется это тем, что в рассматриваемом генераторе кроме двух причин, вызщающих уменьшение напряжения с ростом нагрузки (падения напряжения в якоре и размагничивающего действия реакции якоря), существует еще третья причина – уменьшение тока возбуждения I в = U/ R в , который зависит от напряжения U, т.е. от тока I н .
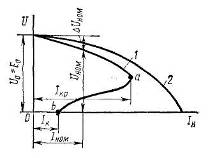
Рис. 2.53. Внешняя характеристика генераторов с независимым и параллельным возбуждением
Особенно наглядно видно действие причин, уменьшающих напряжение генератора при увеличении тока нагрузки, из рассмотрения рис. 2.54, на котором показано построение внешней характеристики по характеристике холостого хода и характеристическому треугольнику.
Построение производится в следующем порядке. Через точку D на оси ординат, соответствующую номинальному напряжению, проводят прямую, параллельную оси абсцисс.
На этой прямой располагают вершину А характеристического треугольника; катет АВ должен быть параллелен оси ординат, а вершина С должна лежать на характеристике холостого хода 1 . Через начало координат и вершину А проводят прямую 2 до пересечения с характеристикой холостого хода; эта прямая является вольт-амперной характеристикой сопротивления цепи обмотки возбуждения. Ордината точки пересечения Е характеристик 1 и 2 даст напряжение генератора U 0 при холостом ходе.
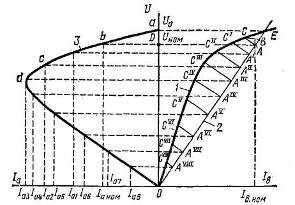
Рис. 2.54 – Построение внешней характеристики генератора с параллельным возбуждением с помощью характеристического треугольника
Произведенное построение справедливо, так как:
а) ток возбуждения при номинальном режиме I в.ном = U ном /R в соответствует абсциссе точки А;
б) э. д. с. генератора при номинальной нагрузке Е ном = Uном + Iа ном ∑r соответствует ординате точки В;
в) э. д. с. Е ном можно определить по характеристике холостого хода, если взять ток возбуждения, который меньше I в.ном на величину отрезка ВС, учитывающего размагничивающее действие реакции якоря.
При построении внешней характеристики 3, ее точки а и b, соответствующие холостому ходу и номинальной нагрузке, определяются величинами напряжений U 0 и U ном . Промежуточные точки получают, проводя прямые А'С', А «С» и т.д., параллельные гипотенузе АС, до пересечения с вольт-амперной характеристикой 2 в точках А', А» и т.д., а также с характеристикой холостого хода 1 в точках С', С» и т.д. Ординаты точек А', А» и т.д. будут соответствовать напряжениям при токах нагрузки Iа 1 , I а2 и т.д., величины которых определяются из соотношения Iа ном : Iа 1 : Iа 2 :… =АС : А'С' : А «С» :…
Изменение напряжения генератора при переходе от режима номинальной нагрузки к режиму холостого хода составляет 10–20%, т.е. больше, чем в генераторе с независимым возбуждением.
При коротком замыкании якоря ток I к генератора с параллельным возбуждением сравнительно мал, так как в этом режиме напряжение и ток возбуждения равны нулю. Следовательно, ток короткого замыкания создается только э. д. с. от остаточного магнетизма и составляет (0,4 – 0,8) I ном . Генератор может быть нагружен только до некоторого максимального тока I кр . При дальнейшем снижении сопротивления нагрузки r н ток I н ≈ Iа ≈ U /r н начинает уменьшаться, так как U падает быстрее, чем уменьшается r н . Работа на участке ab внешней характеристики (см. рис. 10–53) неустойчива; в этом случае машина переходит в режим работы, соответствующий точке b, т.е. в режим короткого замыкания.
Регулировочная и нагрузочная характеристики генератора с параллельным возбуждением имеют такой же характер, как для генератора с независимым возбуждением.
Генератор с последовательным возбуждением. В генераторе с последовательным возбуждением (рис. 2.55, а) ток возбуждения I в = Iа = I н . Внешняя характеристика генератора (рис. 2.55, б , кривая 1) может быть построена по характеристике холостого хода (кривая 2) и реактивному треугольнику ABC, стороны которого увеличиваются пропорционально току I н .
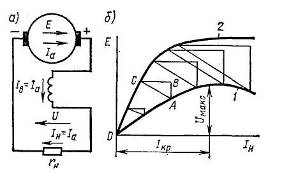
Рис. 2.55 – Схема генератора с последовательным возбуждением и его внешняя характеристика
При токах, меньших I кр , с увеличением тока нагрузки возрастает магнитный поток Ф и э. д. с. генератора Е, вследствие чего увеличивается и его напряжение U. Только при очень больших токах I н > I кр напряжение U с ростом нагрузки уменьшается, так как в этом случае магнитная система машины насыщается и небольшое возрастание потока Ф не может скомпенсировать увеличенное падение напряжения на внутреннем сопротивлении ∑r .Поскольку в генераторе с последовательным возбуждением напряжение сильно изменяется при изменении нагрузки, а при холостом ходе оно близко к нулю, такие генераторы непригодны для питания большинства электрических потребителей. Используют их лишь при электрическом торможении двигателей с последовательным возбуждением, которые при этом переводятся в генераторный режим.
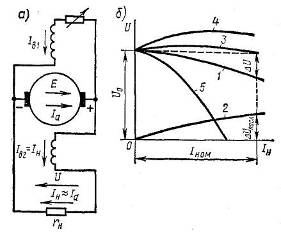
Рис. 2.56 – Схема генератора со смешанным возбуждением и его внешние характеристики
Генератор со смешанным возбуждением. В этом генераторе (рис. 2.56, а) имеются две обмотки возбуждения: основная (параллельная) и вспомогательная (последовательная). Согласное включение двух обмоток позволяет получать приблизительно постоянное напряжение генератора при изменении нагрузки. Внешняя характеристика генератора (рис. 2.56, б) в первом приближении может быть представлена в виде суммы характеристик, создаваемых каждой из обмоток возбуждения. При включении только одной параллельной обмотки, по которой проходит ток возбуждения I в1 , напряжение генератора U постепенно уменьшается с ростом тока нагрузки Iн (кривая 1 ). При включении одной последовательной обмотки, по которой проходит ток возбуждения I в2 = I н , напряжение возрастает с увеличением тока I н (кривая 2).
Подбирая число витков последовательной обмотки так, чтобы при номинальной нагрузке создаваемое ею напряжение ΔU посл компенсировало суммарное падение напряжения ΔU при работе машины с одной только параллельной обмоткой, можно добиться, чтобы напряжение U при изменении тока нагрузки от нуля до I ном оставалось почти неизменным (кривая 3). Практически оно изменяется в пределах 2–3%. Увеличивая число витков последовательной обмотки, можно получить характеристику, при которой напряжение U ном > U 0 (кривая 4); такая характеристика обеспечивает компенсацию падения напряжения не только во внутреннем сопротивлении ∑r генератора, но и в линии, соединяющей его с нагрузкой. Если последовательную обмотку включить так, чтобы ее м. д. с. была направлена против м. д. с. параллельной обмотки (встречное включение), то внешняя характеристика генератора при большем числе витков последовательной обмотки будет крутопадающей (кривая 5 ). Встречное включение последовательной и параллельной обмоток возбуждения применяют в сварочных генераторах и других специальных машинах, где требуется ограничить ток короткого замыкания.
Генераторы постоянного тока, выпускаемые отечественной промышленностью, имеют большей частью параллельное возбуждение. Обычно для улучшения внешней характеристики их снабжают небольшой последовательной обмоткой (один-три витка на полюс).
При необходимости такие генераторы можно включать и по схеме с независимым возбуждением. Генераторы с независимым возбуждением используют только при большой мощности, а также при малой мощности, но низком напряжении. В этих машинах независимо от величины напряжения на якоре обмотку возбуждения рассчитывают на стандартное напряжение постоянного тока 110 или 220 В с целью упрощения регулирующей аппаратуры.
2.9 Параллельная работа генераторов постоянного тока
Рассмотрим параллельную работу генератора, имеющего параллельное или независимое возбуждение, с сетью бесконечно большой мощности, т.е. при условии, что напряжение сети U = const.
Подключение генератора к сети (рис. 2.57, а ). Чтобы включить генератор на параллельную работу с сетью, необходимо привести якорь генератора во вращение с номинальной частотой, проверить соответствие полярности щеток генератора и проводов сети и установить такой ток возбуждения, при котором напряжение генератора U г0 = E 0 равно напряжению сети U. При обеспечении этих условий включение генератора не будет сопровождаться броском тока, так как I H = ( U г0 – U)/ ∑r =0. Условие U г0 – U проверяют с помощью нулевого вольтметра V.
Нагрузка генератора. Чтобы нагрузить генератор, подключенный к сети, необходимо повысить его э. д. с. Это можно сделать путем увеличения частоты вращения якоря или тока возбуждения. Удобнее однако, воздействовать на ток возбуждения.
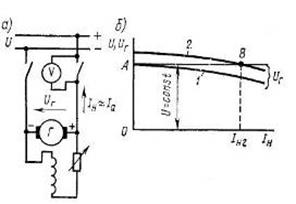
Рис. 2.57 – Схема подключения генератора с параллельным возбуждением к сети и определение его тока нагрузки по внешним характеристикам
Величину тока нагрузки I н да Iа при заданном токе возбуждения можно определить графически по внешним характеристикам генератора 1 и 2, построенным при различных величинах тока возбуждения (рис. 2.57, б). Например, при некотором токе возбуждения I в1 (кривая 1) равенство напряжений генератора U г и сети U имеет место в точке А при токе нагрузки I н1 = 0. При токе возбуждения I в2 внешняя характеристика генератора (кривая 2) пересекается с линией U = const в точке В, соответствующей некоторому установившемуся значению I н2 тока нагрузки.
Работа генератора в этой точке является устойчивой: при случайном изменении тока нагрузки, а следовательно, и тока якоря на величину ΔI н ≈ ΔI а возникает переходный процесс, для которого можно написать уравнение
![]() , (2.71)
, (2.71)
где u = U – мгновенное значение напряжения, сети; i н и е –мгновенные значения тока нагрузки и э. д. с. генератора при переходном процессе; La – индуктивность цепи обмотки якоря; и г – мгновенное значение напряжения генератора.
Из (2.71) следует, что
dijdt = ( ur – u)/ La . (2.72)
При случайном увеличении тока нагрузки свыше I н2 напряжение генератора u г становится меньше напряжения сети u , следовательно, производная di в /dt будет отрицательной, т.е. ток нагрузки начнет уменьшаться, стремясь к установившемуся значению I н2 . При случайном уменьшении тока ниже I н2 напряжение и г > и ,производная di н /dt > 0 и ток нагрузки начнет возрастать до установившегося значения I н2 .
Генератор с последовательным возбуждением устойчиво работать параллельно с сетью не может, так как его напряжение U г увеличивается при возрастании тока нагрузки I н (рис. 2.58, а). Поэтому при случайном отклонении тока якоря от некоторого установившегося значения I н , при котором U г = U (точка А), машина сбрасывает нагрузку или переходит в режим работы, соответствующий очень большому току.
Внешняя характеристика генератора со смешанным возбуждением (рис. 2.58, б ) имеет две точки пересечения с прямой U = const. Точка А соответствует неустойчивому режиму работы, а точка В- устойчивому. Однако и генератор со смешанным возбуждением для параллельной работы с сетью применяют редко, так как для него характерны броски тока при переходе из неустойчивого режима в устойчивый.
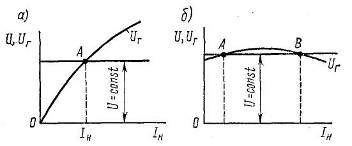
Рис. 2.58 – Определение тока нагрузки при подключении к сети генераторов с последовательным и смешанным возбуждением
2.10 Электродвигатели постоянного тока
Машина постоянного тока с независимым и параллельным возбуждением, подключенная к сети с постоянным напряжением U, может работать как в генераторном, так и в двигательном режиме и переходить из одного режима работы в другой.
Для контура «обмотка якоря – сеть» можно согласно II закону Кирхгофа написать уравнение
![]() , (2.73а)
, (2.73а)
Откуда
![]() . (2.73б)
. (2.73б)
Если Е > U , то ток Iа совпадает по направлению с э. д. с. Е и машина работает в генераторном режиме (рис. 2.59, а ). При этом электромагнитный момент М противоположен направлению вращения n , т.е. является тормозным. Уравнение (2.73а) для генераторного режима может быть записано в виде
U = E- Ia Σr (2.74а)
Если же Е <. U, то ток Iа в уравнении (2.73б) меняет свой знак и будет направлен против э. д. с. Е. В соответствии с этим изменит свой знак и электромагнитный момент М, т.е. он будет действовать по направлению вращения n . При этом машина будет работать в двигательном режиме (рис. 2.59, б) и уравнение (2.73а) примет вид
![]() , (2.74б)
, (2.74б)
если за положительное направление тока Iа для двигигильного режима принять его направление, встречное к э.д.с, Е.
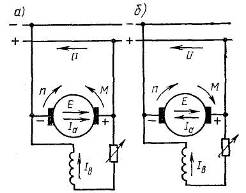
Рис. 2.59 – Направление тока I0 и электромагнитного момента М при работе машины постоянного тока в генераторном идвигательном режимах
Таким образом, генераторы с независимым и параллельным возбуждением, подключенные к сети с напряжением U, автоматически переходят в двигательный режим, если их э. д. с. Е становится меньше напряжения сети U. Точно так же рассматриваемые двигатели автоматически переходят в генераторный режим, когда их э. д. с. Е становится больше U.
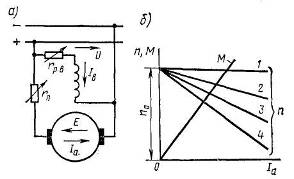
Рис. 2.60 – Схема двигателя с параллельным возбуждением, зависимости его момента и частоты вращения от тока якоря
При работе машины постоянного тока в двигательном режиме э. д. с. Е и вращающий момент M определяются теми же формулами, что и для генератора
![]() ; (2.75)
; (2.75)
![]() , (2.76)
, (2.76)
но момент имеет противоположное направление. Из (2.74б) и (2.75) можно получить формулу для определения частоты вращения
![]() . (2.77)
. (2.77)
Свойства двигателей постоянного тока, как и генераторов, в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с параллельным, независимым последовательным и смешанным возбуждением. Схемы включения двигателей отличаются от схем включения соответствующих генераторов только наличием пускового реостата, который вводится для ограничения тока при пуске.
Двигатель с параллельным возбуждением. В этом двигателе (рис. 2.60, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат r р.в , а в цепь якоря–пусковой реостат r п . Характерной особенностью двигателя является то, что ток возбуждения I в не зависит от тока якоря Ia (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии согласно (2.76) и (2.77) получим, чтс зависимости M =f(I a ) и n= f( Ia ) (моментная и скоростная характеристики) будут линейными (рис. 2.60, б ). Следовательно, линейной будет и механическая характеристика двигателя n = f( M) (см. рис. 2.61, а). Если в цепь якоря включен добавочный резистор или реостат с сопротивлением r п , то
![]() , (2.77а)
, (2.77а)
где n 0 = U/(се Ф) – частота вращения при холостом ходе; Δn = (∑r + r п ) Iа /(се Ф ) – уменьшение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя.
Величина Δn , т.е. сумма сопротивлений ∑r + r п , определяет наклон скоростной n =f( Ia ) и механической М = f (Iа ) характеристик к оси абсцисс. При отсутствии в цепи якоря добавочного сопротивления r п указанные характеристики будут «жесткими» (естественные характеристики 1 на рис. 2.60, б и 2.61, а ), так как падение напряжения Iа ∑r в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3–5% от U ном . При включении добавочного сопротивления r п угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4, соответствующих различным значениям r п2 , r п3 и r п4 . Чем больше сопротивление r п , тем больший угол наклона имеет реостатная характеристика, т.е. тем она «мягче». Следует отметить, что реакция якоря, уменьшая несколько поток машины Ф при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения n возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные мощные двигатели с параллельным возбуждением часто снабжают небольшой последовательной обмоткой возбуждения, которая придает механической характеристике необходимый наклон. М. д. с. этой обмотки при токе I ном составляет 10% от м. д. с. параллельной обмотки.
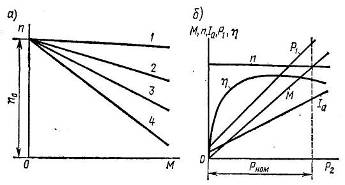
Рис. 2.61 – Механические и рабочие характеристики двигателя с параллельным возбуждением
Регулировочный реостат r p.в позволяет изменять ток возбуждения двигателя I в и его магнитный поток Ф. Как следует из (2.77а), при этом будет изменяться и частота вращения n. В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает (двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и возникает круговой огонь.
На рис. 2.61, б изображены рабочие характеристики рассматриваемого двигателя. Они представляют собой зависимости потребляемой мощности P 1 тока Ia ≈ I н , частоты вращения n, момента М и к. п. д. η от отдаваемой мощности Р 2 на валу двигателя при U = const и I в = const. Характеристики n = f( P 2 ) и M = f (Р 2 ), как следует из рассмотренных ранее положений, являются линейными, а зависимости P l = f (P 2 ), I a = f( P 2 ) и η=f( P 2 ) имеют характер, общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря Iа .
В случае, если обмотка якоря двигателя и обмотка возбуждения подключены к источникам питания с различными напряжениями, его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание двигателей осуществляется от генераторов или полупроводниковых преобразователей. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения I в также не зависит от тока якоря Iа .
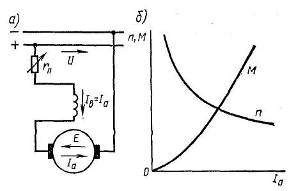
Рис. 2.62 – Схема двигателя с последовательным возбуждением, зависимости его момента и частоты вращения от тока якоря
Двигатель с последовательным возбуждением. В этом двигателе (рис. 2.62, а ) ток возбуждения I в = Iа , поэтому магнитный поток Ф является некоторой функцией тока якоря Iа . Характер этой функции изменяется в зависимости от нагрузки двигателя. При токе якоря 1а < (0,8 ÷ 0,9) I ном , когда магнитная система машины не насыщена Ф = k ф Iа , причем коэффициент пропорциональности k Ф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф растет медленнее, чем Iа , и при больших нагрузках (Iа > I ном ) можно считать, что Ф = const. В соответствии с этим изменяются и зависимости n = f( Ia ) и M– f(I a ).
При токе якоря Iа < (0,8 ÷ 0,9) I ном частота вращения
![]() , (2.78)
, (2.78)
где с1 и с2 – постоянные.
Следовательно, скоростная характеристика двигателя n = f ( Ia ) имеет форму гиперболы (рис. 2.62, б ).
При токе якоря Iа > I ном частота вращения
![]() , (2.78а)
, (2.78а)
где с' 1 и с' 2 – постоянные.
В этом случае скоростная характеристика n = f( Ia ) становится линейной.
Аналогично может быть получена зависимость электромагнитного момента от тока якоря–M = f( Ia ). При Iа < (0,8 ÷ 0,9) I иом электромагнитный момент
![]() , (2.79)
, (2.79)
где c 3 – постоянная.
Следовательно, моментная характеристика М = f (Iа ) имеет форму параболы (рис. 2.62, б).
При Iа > I ном электромагнитный момент
![]() , (2.79а)
, (2.79а)
где с' 3 –постоянная.
В этом случае зависимость M = f( Ia ) становится линейной.
Механические характеристики n = f( M) (см. рис. 2.63, а) могут быть построены на основании зависимостей ni = f( Ia ) и M= f( Ia ). При токе якоря, меньшем (0,8 ÷ 0,9) I ном , частота вращения изменяется по закону
![]() , (2.80)
, (2.80)
где с» 1 –постоянная.
При токе якоря, большим I ном , зависимость n = f( M) становится линейной.
Кроме естественной характеристики 1 , путем включения добавочных пусковых сопротивлений r п в цепь якоря можно получить семейство реостатных характеристик 2 , 3 и 4. Эти характеристики соответствуют различным значениям r п2 , r п3 и rп4 ; причем чем больше гп , тем ниже располагается характеристика.
Из рис. 2.63, а следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются «мягкими» и имеют гиперболический характер.

Рис. 2.63 – Механические и рабочие характеристики двигателя с последовательным возбуждением
При малых нагрузках частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2 –0,25) I ном ; только двигатели очень малой мощности (десятки ватт) используют для работы в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеют место изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Объясняется это тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением. При жесткой характеристике частота вращения n почти не зависит от момента М, поэтому мощность
![]() , (2.81)
, (2.81)
где с 4 – постоянная.
При мягкой характеристике двигателя с последовательным возбуждением частота вращения n
обратно пропорциональна ![]() ,вследствие чего
,вследствие чего
![]() , (2.81а)
, (2.81а)
где c' 4 – постоянная.
Поэтому при изменении нагрузочного момента в широких пределах мощность Р
2
,
а следовательно, мощность Р
1
и ток Iа
у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением.
Кроме того, они лучше переносят перегрузки;
например, при заданной кратности перегрузки по моменту М/М
ном
= k
M
ток якоря в двигателе с параллельным возбуждением увеличивается в k
M
раз, а в двигателе с последовательным возбуждением–только в ![]() раз. По этой же причине двигатель с последовательным возбуждением развивает больший пусковой момент, так как при заданной кратности пускового тока I
п
/I
ном
= ki
пусковой момент его М
п
= k
2
i
М
ном
,в то время как у двигателя с параллельным возбуждением М
п
= ki
М
ном
.
раз. По этой же причине двигатель с последовательным возбуждением развивает больший пусковой момент, так как при заданной кратности пускового тока I
п
/I
ном
= ki
пусковой момент его М
п
= k
2
i
М
ном
,в то время как у двигателя с параллельным возбуждением М
п
= ki
М
ном
.
На рис. 2.63, б приведены рабочие характеристики двигателя с последовательным возбуждением. Характеристики n = f( P 2 ) и M = f (Р 2 ), как следует из рассмотренных ранее положений, являются нелинейными; характеристики P 1 = f (P 2 ), Iа = f (P 2 ) и η = f(Р 2 ) имеют примерно такую же форму, как и у двигателя с параллельным возбуждением.
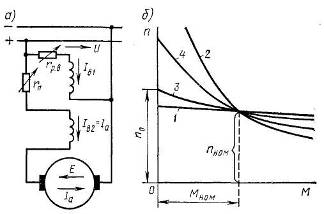
Рис. 2.64 – Схема двигателя со смешанным возбуждением и его механические характеристики
Двигатель со смешанным возбуждением. В этом двигателе (рис. 2.64, а ) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения – параллельной и последовательной. Поэтому его механическая характеристика (рис. 2.64, б , кривые 3 и 4) располагается между характеристиками двигателей с параллельным (прямая 1 ) и последовательным (кривая 2) возбуждением. В зависимости от соотношения м. д. с. параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристику двигателя со смешанным возбуждением к характеристике 1 (при малой м. д. с. последовательной обмотки) или к характеристике 2 (при малой м. д. с. параллельной обмотки). Одним из достоинств двигателя со. смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения холостого хода n 0 имеет конечное значение.
2.11 Пуск в ход электродвигателей постоянного тока
Для пуска двигателей постоянного тока могут быть применены три способа:
1) прямой пуск, при котором обмотка якоря подключена непосредственно к сети;
2) реостатный пуск с помощью пускового реостата, включаемого в цепь якоря для ограничения тока при пуске;
3) пуск путем плавного повышения напряжения, подаваемого на обмотку якоря.
Прямой пуск. Обычно в двигателях постоянного тока падение напряжения I ном ∑r во внутреннем сопротивлении цепи якоря составляет 5–10% от U ном , поэтому при прямом пуске ток якоря I п = U ном /∑r = (10 ÷ 20) I ном , что создает опасность поломки вала машины и вызывает сильное искрение под щетками. По этой причине прямой пуск применяют в основном для двигателей малой мощности (до нескольких сотен ватт), в которых сопротивление ∑r относительно велико, и лишь в отдельных случаях–для двигателей с последовательным возбуждением мощностью в несколько киловатт. При прямом пуске таких двигателей I п = (4 ÷ 6) I ном .
Переходный процесс изменения частоты вращения n и тока якоря ia в процессе пуска определяется нагрузкой двигателя и его электромеханической постоянной времени Т м . Для установления характера изменения n и ia при пуске двигателя с параллельным возбуждением будем исходить из уравнений:
![]() ; (2.82а)
; (2.82а)
![]() , (2.82б)
, (2.82б)
где J – момент инерции вращающихся масс электродвигателя и сочлененного с ним производственного механизма; М н –тормозной момент, создаваемый нагрузкой.
Из (2.82б) определяем ток якоря
![]() . (2.83)
. (2.83)
Подставляя его значение в (2.82а), получаем
![]() (2.84а)
(2.84а)
![]() , (2.84б)
, (2.84б)
или
U
где ![]() – частота вращения при идеальном холостом ходе;
– частота вращения при идеальном холостом ходе;
![]() уменьшение частоты вращения при переходе
уменьшение частоты вращения при переходе
от холостого хода к нагрузке; n
н
= n
0
– Δn
н
–установившаяся частота вращения при нагрузке двигателя; ![]() – электромеханическая постоянная времени, определяющая скорость протекания переходного процесса.
– электромеханическая постоянная времени, определяющая скорость протекания переходного процесса.
При этом I н = М н /(с м Ф) – установившийся ток якоря после окончания процесса пуска, определяемый нагрузочным моментом М н .
Решая уравнение (2.84б), получаем
![]() . (2.85а)
. (2.85а)
Постоянную интегрирования А находим из начальных условий: при t = 0; n = 0 и А = – n н . В результате имеем
![]() . (2.85б)
. (2.85б)
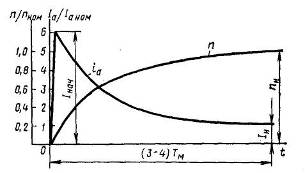
Рис. 2.65 – Переходный процесс изменения частоты вращения и тока якоря при прямом пуске двигателя постоянного тока
Зависимость тока якоря от времени при пуске двигателя определяется из (2.83). Подставляя в него значение
![]() , (2.85в)
, (2.85в)
полученное из (2.846) и (2.856), и заменяя n н = n 0 – Δn , имеем
![]() . (2.86а)
. (2.86а)
Учитывая значение Δn н , n 0 , Т м и М н /с м Ф , получим
![]() , (2.86б)
, (2.86б)
где I нач = U /∑r – начальный пусковой ток.
На рис. 2.65 приведены зависимости изменения тока якоря и частоты вращения (в относительных единицах) при прямом пуске двигателя с параллельным возбуждением. Время переходного процесса при пуске принимается равным (3–4) Т м . За это время частота вращения n достигает (0,95 – 0,98) от установившегося значения n н , а ток якоря Iа также приближается к установившемуся значению.
Реостатный пуск. Этот способ получил наибольшее распространение. В начальный момент пуска при n = 0 ток I п = U/( ∑r + r п ). Максимальное сопротивление пускового реостата r п подбирается так, чтобы для машин большой и средней мощностей ток якоря при пуске I п = (1,4 ÷ 1,8) I ном , а для машин малой мощности I п = (2 ÷ 2,5) I ном . Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением. В начальный период пуск осуществляется по реостатной характеристике 6 (рис. 2.66, а ), соответствующей максимальному значению сопротивления rп пускового реостата; при этом двигатель развивает максимальный пусковой момент М п.макс .
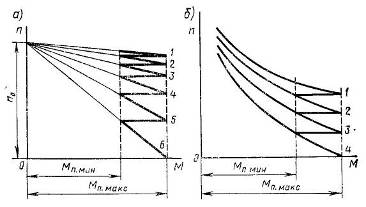
Рис. 2.66 – Изменение частоты вращения и момента при реостатном пуске двигателей с параллельным и последовательным возбуждением
Регулировочный реостат r р .в в этом случае выводится так, чтобы ток возбуждения I в и поток Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением частоты вращения растет э. д. с. Е и уменьшается ток якоря Ia =( U– E)/( ∑r + r п ). При достижении некоторого значения М п.мин часть сопротивления пускового реостата выводится, вследствие чего момент снова возрастает до М п.макс . При этом двигатель переходит на работу по реостатной характеристике 5 и разгоняется до достижения M п.мин . Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатных характеристик 6,5,4,3 и 2 (см. жирные линии на рис. 2.66, а ) до выхода на естественную характеристику 1 . Средний вращающий момент при пуске М п.ср = 0,5 (М п.макс +М п.мин ) = const, вследствие чего двигатель разгоняется с некоторым постоянным ускорением. Таким же образом пускается в ход двигатель с последовательным возбуждением (рис. 2.66, б ). Количество ступеней пускового реостата зависит от жесткости естественной характеристики и требований, предъявляемых к плавности пуска (допустимой разности M п.макс – М п.мин ).
Пусковые реостаты рассчитывают на кратковременную работу под током.
На рис. 2.67 показаны зависимости тока якоря ia , электромагнитного момента М, момента нагрузки М н и частоты вращения n при реостатном пуске двигателя (упрощенные диаграммы).
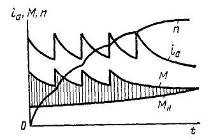
Рис. 2.67 – Переходный процесс изменения частоты вращения, момента и тока якоря при реостатном пуске двигателя постоянного тока
При выводе отдельных ступеней пускового реостата ток якоря ia достигает некоторого максимального значения, а затем уменьшается согласно уравнению (2.85б) до минимального значения. При этом электромеханическая постоянная времени и начальный ток будут иметь различные для каждой ступени пускового реостата значения:
![]() ;
; ![]()
В соответствии с изменением тока якоря изменяется и электромагнитный момент М. Частота вращения n изменяется согласно уравнению
![]() , (2.86в)
, (2.86в)
где n нач –начальная частота вращения при работе на соответствующей ступени пускового реостата.
Заштрихованная на рис. 2.67 область соответствует значениям динамического момента М дин = М – М н ,обеспечивающего разгон двигателя до установившейся частоты вращения.
Пуск путем плавного повышения питающего напряжения. При реостатном пуске возникают довольно значительные потери энергии в пусковом реостате. Этот недостаток можно устранить, если пуск двигателя осуществлять путем плавного повышения напряжения, подаваемого на его обмотку. Но для этого необходимо иметь отдельный источник постоянного тока с регулируемым напряжением (генератор или управляемый выпрямитель). Такой источник используют также для регулирования частоты вращения двигателя.
2.12 Принципы регулирования частоты вращения двигателей постоянного тока
Частота вращения двигателя постоянного тока определяется формулой
![]() . (2.87)
. (2.87)
Следовательно, ее можно регулировать тремя методами:
1) включением добавочного резистора или реостата r доб в цепь обмотки якоря;
2) изменением магнитного потока Ф;
3) изменением питающего напряжения U.
На примере двигателя с параллельным возбуждением рассмотрим принципиальные особенности, свойственные этим методам регулирования.
Включение реостата в цепь якоря. При включении реостата в цепь якоря частота вращения с ростом нагрузки уменьшается более резко, чем при работе двигателя без реостата:
![]() . (2.88)
. (2.88)
Это наглядно показано на рис. 2.68, где приведены характеристики двигателя с параллельным возбуждением: 1 – естественная (при r до6 = 0); 2 -реостатная (при r доб > 0) Частоты вращения n 0 при холостом ходе для обеих характеристик равны, в то время как значения уменьшения частоты вращения Δn при нагрузке различны. При одном и том же токе якоря
![]() .
.
Чем больше добавочное сопротивление r доб , тем круче е увеличением нагрузки падает частота вращения.
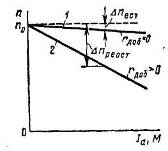
Рис. 2.68 – Скоростные характеристики двигателя с параллельным возбуждением при регулировании частоты вращения путем включения реостата в цепь якоря
Механические характеристики п = f ( M) двигателя с параллельным возбуждением могут быть получены из скоростных характеристик n = f( Ia ) изменением масштаба по оси абсцисс, так как для двигателя этого типа
![]() ,
,
т.е. момент пропорционален току якоря.
Основным недостатком данного метода регулирования является возникновение больших потерь энергии в реостате, особенно при низких частотах вращения. Последнее видно из соотношения
 , (2.89)
, (2.89)
где ΔР – потери в цепи якоря; Р 1 – мощность, подведенная к якорю.
Решая уравнение (2.89) относительно ΔР, получим
![]() , (2.90)
, (2.90)
т.е. потери линейно возрастают с уменьшением частоты вращения якоря.
Очевидно, что данный метод позволяет только уменьшать частоту вращения по сравнению с частотой при естественной характеристике. Иногда существенным является то обстоятельство, что при включении в цепь якоря значительного сопротивления характеристики двигателя становятся крутопадающими («мягкими»), вследствие чего небольшие изменения нагрузочного момента приводят к большим изменениям частоты вращения.
Изменение магнитного потока двигателя. Чтобы изменить магнитный поток, необходимо регулировать ток возбуждения двигателя. При различных магнитных потоках Ф1 и Ф2 частоты вращения будут определяться формулами:
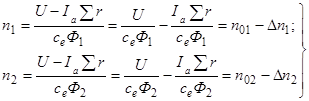 (2.91)
(2.91)
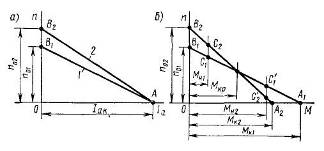
Рис. 2.69 – Скоростная и механическая характеристики двигателя с параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
В двигателе с параллельным возбуждением, например, частота вращения при холостом ходе и уменьшение ее при нагрузке изменяются обратно пропорционально изменению магнитного потока:
![]() . (2.92)
. (2.92)
Таким образом, скоростные характеристики двигателя при различных магнитных потоках не являются параллельными (рис. 2.69, а). Эти характеристики пересекаются при частоте вращения, равной нулю, так как в данном случае Е =с е Фn = 0и ток не зависит от величины потока:
![]() ; (2.93)
; (2.93)
он определяется величинами напряжения и сопротивления цепи якоря. Величину тока Iа к при n = 0 называют током короткого замыкания.
Механические характеристики для двигателя с параллельным возбуждением строятся на основании следующих соображений. Каждая из механических характеристик является практически линейной (если пренебречь реакцией якоря) и может быть построена по двум точкам: точке холостого хода, в которой момент равен нулю, и точке короткого замыкания, в которой момент максимален.
Сравнивая моменты в режиме короткого замыкания при различных значениях магнитного потока, получим
![]() . (2.94)
. (2.94)
Таким образом, при уменьшении магнитного потока частота вращения холостого хода возрастает, а момент при коротком замыкании снижается. Следовательно, механические характеристики, построенные при различных величинах магнитного потока, пересекаются при частоте вращения, меньшей частоты вращения при холостом ходе, но большей нуля (рис. 2.69, б ). Рассматривая механические характеристики, можно сделать вывод, что при величинах нагрузочного момента, существенно меньших М кр , снижение потока ведет к увеличению частоты вращения.
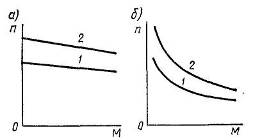
Рис. 2.70 – Механические характеристики двигателей с параллельным и последовательным возбуждением большой и средней мощностей:
1-при нормальном возбуждении, 2 – при уменьшении магнитною потока
Это является характерным для двигателей средней и большой мощностей (рис. 2.70, а ), где в рабочем диапазоне изменения токов имеют место небольшие падения напряжения в якоре (для получения высокого к. п. д.).
В микромашинах уменьшение потока, т.е. тока возбуждения, обычно применяют для снижения частоты вращения.
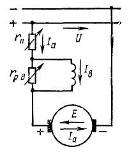
Рис. 2.71 – Включение регулировочного реостата в двигателе с последовательным возбуждением
Аналогично располагаются скоростные и механические характеристики двигателя с последовательным возбуждением; поэтому в двигателях большой и средней мощностей при уменьшении магнитного потока частота вращения возрастает (рис. 2.70, б ). Уменьшение магнитного потока в этом двигателе осуществляется обычно путем включения регулировочного реостата r p.в параллельно обмотке возбуждения (рис. 2.71), вследствие чего ток возбуждения
![]() , (2.95)
, (2.95)
где r р.в- сопротивление регулировочного реостата, включенного параллельно обмотке возбуждения; k p.в = I в /Ia – коэффициент регулирования возбуждения.
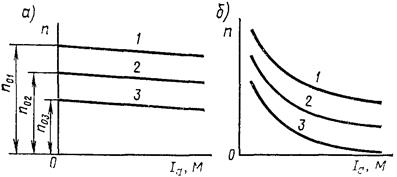
Рис. 2.72 – Скоростные и механические характеристики двигателей
с параллельным (независимым) (а) и последовательным (б) возбуждением при регулировании частоты вращения путем изменения напряжения на зажимах якоря
Рассмотренный метод регулирования весьма прост и экономичен, поэтому его широко применяют на практике. Однако регулирование частоты вращения этим методом можно осуществить только в сравнительно небольшом диапазоне; обычно n макс /n мин = 2 ÷ З. Нижний предел n мин ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток. Верхний предел n макс определяется условиями устойчивости (при сильном уменьшении Ф двигатель идет в «разнос»), а также тем, что при глубоком ослаблении возбуждения резко увеличивается искажающее действие реакции якоря и растет реактивная э.д.с, что повышает опасность возникновения искрения на коллекторе и появления кругового огня. По этой причине двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, должны иметь компенсационную обмотку и пониженную величину реактивной э. д. с. при номинальном режиме.
Изменение напряжения на зажимах якоря. При различных напряжениях на зажимах якоря U 1 и U 2 частоты вращения будут соответственно определяться формулами:
![]() ;
;
![]() .
.
В двигателе с параллельным возбуждением частота вращения холостого хода изменяется пропорционально изменению напряжения:
![]() , (2.96)
, (2.96)
а падение частоты вращения при одинаковой нагрузке остается неизменным:
![]() . (2.97)
. (2.97)
В связи с этим скоростные характеристики n = f(I a ) двигателя с параллельным возбуждением представляют собой семейство параллельных прямых 1 , 2 и 3 (рис. 2.72, а ).
Механические характеристики n = f( M) получаются из скоростных простым изменением масштаба по оси абсцисс, так как момент пропорционален току якоря.
Скоростные и механические характеристики двигателя с последовательным возбуждением в основном строятся аналогично (рис. 2.72, б ).
Регулирование частоты вращения двигателя путем изменения напряжения на зажимах якоря обычно ведут «вниз», т.е. уменьшают напряжение и частоту вращения по сравнению с номинальными.
2.13 Работа электродвигателей постоянного тока в тормозных режимах
Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Торможение необходимо в том случае, если нужно быстро остановить механизм или быстро уменьшить его частоту вращения. Применение механических тормозов для этих целей затруднительно из-за нестабильности их характеристик, малого быстродействия и трудностей автоматизации.
Различают три вида тормозных режимов двигателей постоянного тока:
1) генераторное торможение с отдачей электрической энергии в сеть (рекуперативное торможение);
2) генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря (реостатное, или динамическое, торможение);
3) электромагнитное торможение (торможение противоключением).
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном n, т.е. является тормозным. Рассмотрим более подробно эти режимы.
Рекуперативное торможение. Двигатель с параллельным возбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения n свыше частоты вращения n 0 = U/се Ф. В этом случае э. д. с. машины становится больше напряжения сети и ток меняет свое направление:
![]() , (2.98)
, (2.98)
т.е. двигатель переходит в генераторный режим, создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
Переход машины с параллельным возбуждением из двигательного режима в генераторный может происходить автоматически, если под действием внешнего момента якорь будет вращаться с частотой, большей частоты вращения холостого хода: n > n 0 . Можно перевести машину в генераторный режим и принудительно, уменьшив частоту вращения n 0 за счет увеличения магнитного потока (тока возбуждения) или снижения напряжения, подводимого к двигателю. Механические характеристики в генераторном режиме являются продолжением механических характеристик, имеющих место в двигательном режиме, в область отрицательных моментов (рис. 2.73).
Двигатели с последовательным возбуждением не могут автоматически переходить в режим рекуперативного торможения. В случае необходимости иметь рекуперативное торможение схему двигателей в тормозном режиме изменяют, превращая двигатели в генераторы с независимым возбуждением. Двигатели со смешанным возбуждением могут автоматически переходить в генераторный режим, что обусловило их применение в троллейбусах, трамваях и т.п., где имеются частые остановки, а двигатель должен обладать «мягкой» механической характеристикой.
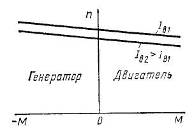
Рис. 2.73 – Механические характеристики двигателя с параллельным возбуждением в двигательном и генераторном режимах
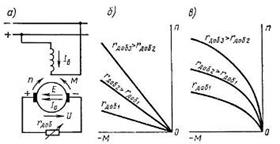
Рис. 2.74 – Схема включения двигателя с параллельным возбуждением в режиме динамического торможения; механические характеристики двигателей с параллельным и последовательным возбуждением в этом режиме
Динамическое торможение. При динамическом (реостатном) торможении двигателя с параллельным возбуждением обмотку якоря отключают от сети и к ней присоединяют реостат r доб (рис. 2.74, а). При этом машина работает генератором и создает тормозной момент. Однако выработанная электрическая энергия гасится в реостате. Регулирование тока якоря Iа = Е /(∑r + r доб ) и тормозного момента М при этом способе торможения осуществляется путем изменения сопротивления r доб , подключенного к обмотке якоря (рис. 2.74, б ), или э.д.с. Е (воздействуя на ток возбуждения). При n = 0 тормозной момент равен нулю, следовательно, машина не может быть заторможена в неподвижном состоянии.
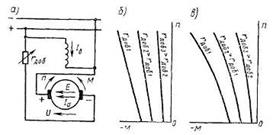
Рис. 2.75 – Схема включения двигателя с параллельным возбуждением в режиме электромагнитного торможения (а); механические характеристики двигателей с параллельным (б) и последовательным (в) возбуждением в этом режиме
Двигатель с последовательным возбуждением может работать в режиме динамического торможения, но при переводе его в этот режим нужно переключить провода, подводящие ток к обмотке возбуждения. Последнее необходимо для того, чтобы при изменении направления тока в якоре (при переходе с двигательного режима в генераторный) направление тока в обмотке возбуждения оставалось неизменным и создаваемая этой обмоткой м.д.с. Fв совпадала по направлению с м. д. с. Fост от остаточного магнетизма. В противном случае генераторы с самовозбуждением размагничиваются. Механические характеристики для этого двигателя в тормозных режимах (рис. 2.74, в) нелинейны. Двигатель со смешанным возбуждением также может работать в режиме динамического торможения.
Электромагнитное торможение. Вэтом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление вращения, т.е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя, путем переключения проводов, подводящих ток к обмотке якоря (рис. 2.75, а ) или к обмотке возбуждения. Чтобы ограничить величину тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление r доб . Регулирование величины юка Ia = ( U + Е )/(∑r + r доб ), т.е. тормозного момента М, осуществляют изменением сопротивления r доб (рис. 10–75, б, в) или э.д.с. Е (тока возбуждения I в ).
С энергетической точки зрения рассматриваемый способ торможения является самым невыгодным, так как машина потребляет как механическую, так и электрическую энергию, которые гасятся в обмотке якоря и во включенном в ее цепь реостате. Но при этом способе можно получать большие тормозные моменты при низких частотах вращения и даже при n –0, поскольку в этом случае ток Iа = U /∑r + r доб ).
2.14 Современные способы регулирования частоты вращения электродвигателей постоянного тока
Описанные принципы регулирования частоты вращения в двигательном и тормозных режимах находят свою практическую реализацию в четырех основных способах регулирования:
1) реостатно-контакторное управление;
2) регулирование по системе «генератор–двигатель»;
3) регулирование по системе «управляемый выпрямитель–двигатель»;
4) импульсное регулирование.
Подробное исследование этих способов регулирования дается в курсах электропривода и теории автоматического регулирования. В этом разделе будут рассмотрены только основные положения, имеющие непосредственное отношение к теории электрических машин.
Реостатно-контакторное управление. В настоящее время это управление применяют весьма широко для регулирования частоты вращения двигателей малой и средней мощности, а иногда (на железнодорожном транспорте) и для регулирования мощных двигателей.
Обычно при реостатно-контакторном управлении используют два метода регулирования: при частотах вращения, меньших номинальной, в цепь якоря включают дополнительные сопротивления; при повышенных частотах вращения регулируют ток возбуждения.
Машины малой мощности при отсутствии автоматизированного управления имеют два ползунковых регулировочных реостата, один из которых включен в цепь якоря, а другой – в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса величину сопротивлений изменяют ступенчато (рис. 10–76) при помощи контакторов. Если требуется точное регулирование, то число контакторов должно быть очень большим, при этом вся установка становится громоздкой, дорогой и сравнительно малонадежной.
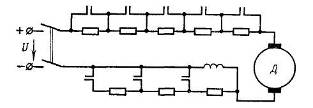
Рис. 2.76 – Схема реостатно-контакторного регулирования частоты вращения двигателя с последовательным возбуждением
Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют при помощи той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы.
В связи со сложностью автоматизации и большими расходами, идущими на ремонт и эксплуатацию, реостатно-контакторное управление в настоящее время постепенно заменяют более совершенными системами управления.
Система «генератор-двигатель». В этой установке (рис. 2.77) двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводят во вращение от какого-либо первичного двигателя ПД (электродвигателя, дизеля и пр.). Регулирование частоты вращения осуществляют изменением:
1) напряжения на якоре двигателя путем изменения тока возбуждения генератора;
2) магнитного потока двигателя путем регулирования тока возбуждения двигателя.
Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двигателя, но при уменьшенном токе возбуждения генератора, т.е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т.е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят путем изменения полярности подводимого к якорю напряжения, для чего изменяют направление тока в обмотке возбуждения генератора.
Система «генератор – двигатель» выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т.п. Поскольку управление двигателем осуществляют путем регулирования сравнительно небольших токов возбуждения, управление легко поддается автоматизации.
Установки типа «генератор–двигатель» получили широкое распространение в промышленности и на транспорте, в тех устройствах, где требуется регулирование частоты вращения в широких пределах. В транспортных установках генератор приводится во вращение дизелем. В промышленности обычно для привода генератора используют трехфазные синхронные или асинхронные двигатели.
Систему «генератор – двигатель» широко применяют в металлургической промышленности для привода прокатных станов с двигателями мощностью 10 000 кВт и более при диапазоне регулирования частоты вращения 1:200 и точности поддержания заданной частоты вращения (погрешности) менее 1%.
Следует отметить, что в этой системе уменьшение частоты вращения производят с использованием рекуперативного торможения: сначала, увеличивая ток возбуждения двигателя, а затем, постепенно уменьшая ток возбуждения генератора, можно перевести двигатель в генераторный режим и быстро затормозить механизм. При этом накопленная кинетическая энергия якоря и механизма отдается в электрическую сеть.
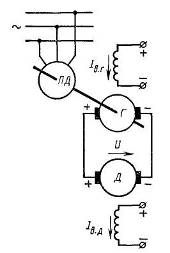
Рис. 2.77 – Схема регулирования двигателя с независимым возбуждением при питании его от генератора
Если нагрузка толчкообразная, то иногда на валу первичного двигателя, вращающего генератор, ставят маховик, который уменьшает перегрузки первичного двигателя.
Недостатки системы «генератор–двигатель»:
1) большие масса, габариты и стоимость установки;
2) сравнительно низкий к. п. д. (порядка 0,6 – 0,7), так как производится трехкратное преобразование энергии.
В последнее время на транспорте (тепловозы, большие автомобили, корабли и т.п.) вместо генератора постоянного тока в системе «генератор–двигатель» применяют синхронный генератор с полупроводниковым выпрямителем. Это позволяет снизить вес и уменьшить стоимость генератора. В промышленных установках такое усовершенствование не получило широкого распространения, так как из-за выпрямителя теряется возможность рекуперативного торможения.
Система «управляемый выпрямитель–двигатель». Развитие полупроводниковой техники позволило применить для регулирования частоты вращения двигателя управляемый выпрямитель УВП, выполненный на тиристорах, где одновременно с выпрямлением производится регулирование выпрямленного напряжения (рис. 2.78). Применение системы «управляемый выпрямитель – двигатель» позволяет увеличить коэффициент полезного действия и уменьшить массу установки.
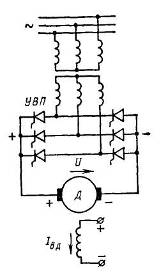
Рис. 2.78. Схема регулирования двигателя с независимым возбуждением при питании его от управляемого вентильного преобразователя
Если требуется быстрая остановка механизма, с последующим реверсированием, то для осуществления рекуперативного торможения параллельно с выпрямителем ставят инвертор, т.е. еще один полупроводниковый преобразователь, позволяющий отдавать электрическую энергию от машины постоянного тока в сеть переменного тока.
Недостатком системы «управляемый выпрямитель–двигатель» является низкий коэффициент мощности при пониженном выходном напряжении. Кроме того, несколько ухудшается коммутация двигателя из-за пульсаций тока якоря. Особенно велики пульсации тока при питании от сети однофазного тока (электровозы переменного тока), где обеспечение удовлетворительной коммутации вырастает в большую проблему.
В настоящее время система «управляемый выпрямитель–двигатель» имеет меньшую надежность, чем система «генератор – двигатель», из-за сложности полупроводникового оборудования, особенно системы управления.
Импульсное регулирование частоты вращения. В последние годы в связи с развитием полупроводниковой техники широко применяют импульсный метод регулирования частоты вращения двигателей постоянного тока. При этом на двигатель с помощью импульсного прерывателя периодически подаются импульсы напряжения определенной частоты.
Импульсный прерыватель (рис. 2.79, а) состоит из входного фильтра L ф -С ф , электронного ключа ТK (транзисторного или тиристорного), обратного диода Д и индуктивности L. В период времени τ, когда электронный ключ замкнут (транзистор или тиристор открыт), питающее напряжение U подается полностью на якорь двигателя, и его ток ia увеличивается (рис. 10–79, б ); когда электронный ключ разомкнут (транзистор или тиристор заперт), ток iа продолжает протекать через якорь двигателя и обратный диод Д под действием электромагнитной энергии, запасенной в индуктивностях La + L цепи якоря; при этом ток ia уменьшается. Частота следования импульсов при номинальном режиме обычно составляет 200–400 Гц, вследствие чего период Т примерно на два порядка меньше постоянной времени цепи якоря. Поэтому за время импульса τ ток в двигателе не успевает значительно возрасти, а за время паузы (Т – τ) – уменьшиться.
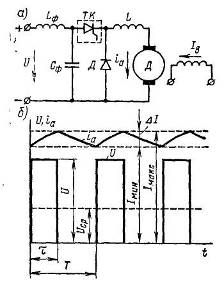
Рис. 2.79 – Схема импульсного регулирования двигателя постоянного тока (а); графики изменения напряжения и тока при работе двигателя в режиме непрерывного тока (б)
Среднее напряжение, подаваемое на обмотку якоря,
![]() , (2.99)
, (2.99)
где α = τ/Т – коэффициент регулирования напряжения, равный относительной длительности включения ключа ТК.
При этом частота вращения двигателя
![]() , (2.100)
, (2.100)
где Iа = I ср –среднее значение тока якоря.
Изменение тока при работе импульсного прерывателя ΔI = I макс – I мин определяется по приближенной формуле
![]() , (2.101)
, (2.101)
где La + L– индуктивность цепи якоря двигателя.
Если параметры схемы выбраны так, что пульсация тока не превосходит 5–10%, то работа двигателя практически не отличается от работы двигателя при постоянном напряжении. Скоростные и механические характеристики двигателя 1, 2 и 3 (рис. 2.80), полученные при различных напряжениях, подаваемых на обмотку якоря, в таком режиме работы аналогичны соответствующим характеристикам двигателя при изменении питающего напряжения U.
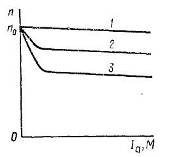
Рис. 2.80 – Скоростные и механические характеристики двигателя с параллельным возбуждением при импульсном регулировании
При уменьшении нагрузки двигателя с параллельным возбуждением возрастают пульсации тока якоря, и при некоторой критической нагрузке наступает режим прерывистых токов. Поскольку условие Iа = 0 имеет место при Е = U , частота вращения при идеальном холостом ходе n 0 = U/(се Ф) не будет зависеть от времени т, т.е. от коэффициента регулирования напряжения α. Благодаря этому при некоторой критической частоте вращения n кр , когда двигатель переходит в режим прерывистых токов, угол наклона скоростных и механических характеристик к оси абсцисс резко изменяется. В диапазоне n 0 > n> n кр эти характеристики имеют примерно такую же форму, как и при регулировании частоты вращения путем включения реостата в цепь якоря. Критическая частота вращения
![]() , (2.102)
, (2.102)
где β = Т /Та . Здесь Та = (L + Lа )/∑r – постоянная времени цепи обмотки якоря.
Среднее напряжение U ср , подаваемое на двигатель, регулируется путем изменения либо продолжительности периода Т между подачей управляющих импульсов на электронный ключ ТK при τ=const (частотно-импульсное регулирование), либо времени τ при постоянном значении Т (широтно-импулъсное регулирование).
Используют также комбинированное регулирование, при котором изменяется как Т, так и τ.
В настоящее время импульсное регулирование двигателей малой мощности и микродвигателей осуществляют с помощью импульсных прерывателей, в которых коммутирующими элементами являются транзисторы. Для регулирования двигателей средней ибольшой мощностей применяют прерыватели с тиристорами. Так как тиристор, в отличие от транзистора, является не полностью управляемым вентилем, то для его запирания применяют различные схемы искусственной коммутации, обеспечивающие прерывание проходящего тока путем подачи на его электроды обратного напряжения.
Рис. 2.81 – Схемы включения двигателя постоянного тока через тиристорный импульсный прерыватель при частотно-импульсном и широтно-импульсном регулировании
На рис. 2.81 показаны две простейшие схемы импульсных тиристорных прерывателей. Схему, изображенную на рис. 2.81, а,
используют при частотно-импульсном регулировании Тиристор Т
отпирается путем подачи импульсов гока управления на его управляющий электрод, запирание же его осуществляется с помощью коммутирующего конденсатора С
к
Перед включением тиристора конденсатор С
к
заряжен до напряжения U.
При подаче отпирающего импульса на управляющий электрод тиристор Т
открывается и через двигатель начинает проходить ток ia
.
Одновременно происходит перезаряд конденсатора С
к
–
через резонансный контур, содержащий индуктивность L
1
.
После окончания перезаряда, когда полярность конденсатора изменится, к тиристору будет приложено обратное напряжение. При этом он восстанавливает свои запирающие свойства и прохождение тока через тиристор прекращается. В дальнейшем конденсатор заряжается через нагрузку и схема оказывается подготовленной для последующего отпирания тиристора. Время открытого состояния тиристора определяется параметрами резонансной цепи: ![]()
Схему, изображенную на рис. 2.81, б , используют при широтно-импульсном и комбинированном регулирований. В этом случае импульсный прерыватель имеет два тиристора: главный Т1 и вспомогательный Т2. Запирание главного тиристора Т1 осуществляется коммутирующим конденсатором С к , который подключается к тиристору Т1 в требуемые моменты времени вспомогательным тиристором Т2. После запирания тиристора Т1 коммутирующий конденсатор заряжается от источника питания через тиристор Т2 и якорь двигателя, а после повторного открытия главного тиристора Т1 перезаряжается через цепочку, содержащую индуктивность L 1 и диод Д1, и приобретает полярность, требуемую для последующего запирания тиристора Т1 .
Торможение при импульсном регулировании. При работе двигателя от импульсного прерывателя можно выполнить его рекуперативное и динамическое торможения. Наиболее интересная особенность рекуперативного торможения при импульсном регулировании – возможность осуществления его при величине э. д. с. двигателя, меньшей напряжения сети. В связи с этим рекуперативное торможение может осуществляться почти до полной остановки.
При рекуперативном торможении импульсный прерыватель ИП включают параллельно якорю двигателя, диод Д –между якорем и питающей сетью. Приотпирании прерывателя ИП якорь машины вместе с индуктивностью L замыкается накоротко. При этом увеличивается ток ia и происходит накопление электромагнитной энергии в индуктивностях L + La , а возникающая э. д. с. самоиндукции eL уравновешивает э. д. с. машины Е. При запирании прерывателя ИП ток ia под действием э. д. с. самоиндукции протекает через диод Д и накопленная энергия отдается в сеть. Среднее значение тока, отдаваемого в сеть, определяется разностью между средней э. д. с. якоря Е и напряжением сети U.
Из закона сохранения энергии Ia ср E= I с.ср U имеем
![]() . (2.103)
. (2.103)
Следовательно, по мере уменьшения частоты вращения якоря ток I с.ср , отдаваемый в сеть, уменьшается, хотя ток якоря может оставаться постоянным, а следовательно, неизменным будет оставаться и тормозящий электромагнитный момент.
Рис. 2.104 – Схема рекуперативного торможения двигателя постоянного тока при импульсном регулировании
По мере снижения частоты вращения n и э. д. с. Е для поддержания требуемого значения тока Iа увеличивают частоту тока f при частотно-импульсном регулировании или длительность импульса τ при широтно-импульсном регулировании. При малой частоте вращения, когда αувеличивается до единицы, якорь машины остается все время замкнутым накоротко, и отдача энергии в сеть прекращается. Однако ток Iа протекает через якорь и режим торможения осуществляется практически до полной остановки.
Частота вращения n кр , при которой прекращается рекуперативное торможение,
![]() ,
,
где r и.п –сопротивление элементов импульсного прерывателя (тиристоров и индуктивности L ), по которым замыкается ток ia .
Динамическое торможение осуществляют аналогично, однако в схеме вместо сети и фильтра L Ф -С ф включают реостат, в котором гасится энергия, отдаваемая машиной.
Импульсное регулирование широко применяют при питании двигателей от сети постоянного тока, а также в автономных устройствах, где необходимо использовать аккумуляторы электрической энергии.
2.15 Универсальные коллекторные двигатели
В устройствах автоматики и различных электробытовых приборах широко применяют универсальные коллекторные двигатели мощностью от нескольких ватт до нескольких сотен ватт, которые могут работать от источника как постоянного, так и однофазного тока.
Устройство двигателя. Универсальный коллекторный двигатель устроен принципиально так же, как и двигатель постоянного тока с последовательным возбуждением. Отличие универсального двигателя от машины постоянного тока состоит в том, что магнитная система выполнена полностью шихтованной, а катушки обмотки возбуждения имеют две секции и промежуточные выводы. Выполнение статора и ротора машины шихтованными обусловлено тем, что при работе на переменном токе они пронизываются переменным магнитным потоком; секционирование же обмотки возбуждения вызвано тем, что в этом режиме из-за падения напряжения в индуктивном сопротивлении двигателя номинальная частота вращения оказывается меньшей, чем при работе на постоянном токе: Для выравнивания частот вращения при работе на постоянном токе в цепь якоря включают все витки обмотки возбуждения, а при работе на переменном токе – только часть их, вследствие чего соответственно уменьшается магнитный поток машины.
Рис. 2.104 – Схема включения универсального коллекторного двигателя
В универсальных коллекторных двигателях, выпускаемых отечественной промышленностью, обмотку возбуждения разделяют на две части и включают с обеих сторон якоря. Такое включение (симметрирование обмотки) позволяет уменьшить радиопомехи, создаваемые двигателем.
При работе на постоянном токе универсальный коллекторный двигатель ведет себя так же, как двигатель постоянного тока с последовательным возбуждением. Работа же двигателя на переменном токе имеет ряд специфических особенностей.
Электромагнитный момент при работе на переменном токе. В рассматриваемом режиме ток якоря ia и магнитный поток Ф изменяются по синусоидальному закону:
![]() ; (2.104)
; (2.104)
![]() , (2.105)
, (2.105)
где γ– угол, возникающий из-за потерь мощности в стали. Мгновенное значение электромагнитного момента
 . (2.106)
. (2.106)
Графики изменения тока ia , магнитного потока Ф и электромагнитного момента т показаны на рис. 2.105, а . Очевидно, что момент двигателя можно представить в виде двух составляющих: постоянной
![]() (2.107а)
(2.107а)
и переменной, которая изменяется с двойной частотой,
![]() (2.107б)
(2.107б)
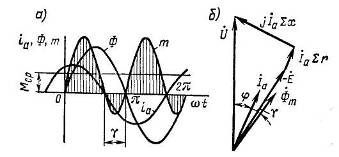
Рис. 2.105 – Графики изменения тока, потока и электромагнитного момента универсального коллекторного двигателя и его векторная диаграмма при работе на переменном токе
Электромагнитный момент двигателя является переменным, а в отдельные промежутки времени даже тормозным, однако якорь двигателя вращается с равномерной частотой, так как он имеет сравнительно большой момент инерции. Среднее значение момента
Характеристики двигателя при работе на переменном токе
Векторная диаграмма однофазного коллекторного двигателя (рис. 2.106, б ) строится на основании уравнения
![]() (2.108)
(2.108)
где ∑r и ∑x – суммы активных и реактивных сопротивлений в цепи обмотки якоря.
Э. д. с, индуктируемая в обмотке якоря,
![]() , (2.109)
, (2.109)
![]() .
.
Из (6.109) можно получить зависимость частоты вращения от тока якоря:
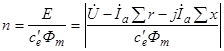 . (2.110)
. (2.110)
На основании (2.108) и (2.109) строятся зависимости n = f (I а ), M = f ( Ia ) и n = f ( M ). Так как способ возбуждения машины при работе на постоянном и переменном токе остается неизменным, а формулы (2.108) и (2.109) для частоты вращения n и момента М имеют такую же структуру, как и формулы (2.76) и (2.77а), механические характеристики двигателя при работе в двух указанных режимах будут приблизительно одинаковыми. Однако при переменном токе в числителе (2.109) появляется дополнительный член jİа ∑x сдвигающий механическую характеристику двигателя в область более низких частот вращения (рис. 2.106, а , кривая 2). Для того чтобы приблизить ее к механической характеристике, имеющей место при работе на постоянном токе (кривая 1), часть витков обмотки возбуждения при переходе на питание переменным током отключают, т.е. уменьшают магнитный поток машин. При этом обеспечивается одинаковая номинальная частота вращения двигателя в обоих режимах работы (кривая 3 ).
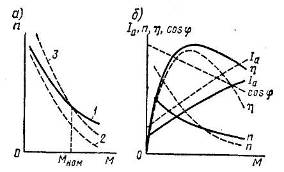
Рис. 2.106 – Механические и рабочие характеристики универсального коллекторного двигателя
В связи с уменьшением магнитного потока двигателя при работе на переменном токе его магнитная система оказывается менее насыщенной, чем при работе на постоянном токе. Поэтому при работе в рассматриваемом режиме зависимость M = f ( Ia ) приближается к параболической; зависимость n = f ( Ia ) к гиперболической в большем диапазоне изменения тока, чем при постоянном токе, а механическая характеристика становится более мягкой.
Рабочие характеристики двигателя при его работе на постоянном (сплошные линии) и переменном (штриховые линии) токе имеют приблизительно одинаковую форму. При переменном токе ток якоря больше, чем при постоянном токе, из-за появления реактивной составляющей и увеличения активной составляющей вследствие возрастания потерь в стали. По этим же причинам к. п. д. двигателя при переменном токе меньше, чем при постоянном.
Регулирование частоты вращения при работе на постоянном токе осуществляют путем включения в цепь якоря реостата, изменения питающего напряжения и тока возбуждения (путем шунтирования обмотки возбуждения реостатом). При переменном токе регулирование частоты вращения осуществляют в основном изменением питающего напряжения; реже–включением реостата в цепь якоря.
Рис. 2.107 – Возникновение реактивной и трансформаторной э. д. с. в универсальном коллекторном двигателе
Коммутация при работе на переменном токе.
В этом случае в коммутируемой секции кроме реактивной э. д. с. е
р
индуктируется еще трансформаторная э.д.с. е
тр
, так как эта секция пронизывается переменным магнитным потоком. Реактивная э.д.с. возникает так же, как и в машине постоянного тока, в результате изменения тока ia
в коммутируемой секции при переходе ее из одной параллельной ветви в другую. Однако в данном случае токи +
ia
и – ia
в каждой параллельной ветви (рис. 2.107, а
) не остаются постоянными, а изменяются по синусоидальному закону ![]() .
.
Следовательно, реактивная э.д.с. e р ,пропорциональная производной di / dt , будет зависеть от величины тока ia в момент коммутации, т.е. в разные моменты времени она будет различной. Если пренебречь периодом коммутации Т к по сравнению с временем Т 0 между двумя последовательными коммутациями, то можно считать, что производная
![]() , (2.111)
, (2.111)
а реактивная э.д.с.
![]() , (2.112)
, (2.112)
где ![]() – максимальное значение реактивной э.д.с, которое имеет место при максимальном токе якоря Iam
.
– максимальное значение реактивной э.д.с, которое имеет место при максимальном токе якоря Iam
.
Таким образом, реактивная э. д.с. совпадает по фазе с током якоря. Она пропорциональна частоте вращения n (период коммутации Т к обратно пропорционален n )и току якоря I а , так же как в машинах постоянного тока.
Трансформаторная э.д.с. индуктируется в коммутируемой секции переменным магнитным потоком машины. Так как магнитный поток изменяется по закону Ф = Ф m sinωt , то при установке щеток на геометрической нейтрали
![]() , (2.113)
, (2.113)
где ωc – число витков в секции.
Следовательно, если не учитывать небольшого угла γ, то она будет сдвинута относительно реактивной э. д. с. на 90°. Результирующая э.д.с. в коммутируемой секции будет изменяться по синусоидальному закону и в некоторые моменты времени будет иметь максимальное значение
![]() . (2.114)
. (2.114)
Установка дополнительных полюсов обеспечивает компенсацию реактивной э.д.с. Трансформаторная же э.д.с. остается нескомпенсированной и создает добавочный ток, замыкающийся через щетки. Это ухудшает коммутацию машины, а следовательно, может вызвать опасное искрение и значительные радиопомехи. Особенно неблагоприятные условия возникают при пуске двигателя, когда трансформаторная э. д. с. достигает большой величины из-за увеличенных значений пускового тока и потока возбуждения.
По указанной причине коллекторные машины переменного тока средней и большой мощностей не получили широкого применения. В коллекторных двигателях малой мощности трансформаторная э.д.с. невелика и практически не ограничивает его нагрузку, как это имеет место в более мощных машинах. Однако срок службы щеток, коллектора и всей машины при работе на переменном токе сокращается по сравнению со сроком службы на постоянном токе.
Список литературы
1. Копылов И.П. Электрические машины. – М.: Энергоиздат, 2004.
2. Брускин Д.Э., Зерохович А.Е., Хвостов В.С. Электрические машины. Т. 1,2. – М.:, Высш. шк., 1987.
3. Токарев Б.Ф. Электрические машины, – М.: Энергоиздат, 1990.
4. Копылов И.П. Математическое моделирование энергетических машин. Учебник. – М.:, Высш. шк., 2001.
5. Гольдберг, Свириденко Я.С. Проектирование электрических машин. Учебник для ВТУзов. – М.:, Высш. шк., 2001.
6. Иванов-Смоленский А.В. Электрические машины. – М.:, Энергия, 1988.
7. Кацман М.М. Электрические машины. – М.: Энергоиздат, 1990.
8. Вольдек А.И. Электрические машины. – Л.: Энергия, 1984.
[1] В дальнейшем для обозначения потока первых гармоник магнитного поля, основных гармоник э.д.с. и токов в формулах и на векторных диаграммах будут применяться соответствующие буквенные символы без индекса «1»,
[2] Для обозначения величин в относительных единицах используют те же буквенные символы, но со звездочками
[3] В генераторном и двигательном режимах чередование полярности главных и добавочных полюсов различно, чем и объясняется наблюдающаяся иногда разница в искрении щеток машины при генераторном и двигательном режимах.
[4] Это не относится к электродвигателям с последовательным возбуждением, в которых коммутационная напряженность машины определяется условиями эксплуатации и при малых частотах вращения может быть большей из-за увеличения тока якоря.
Похожие рефераты:
Оборудование летательных аппаратов
Обслуживание и ремонт электрических двигателей (ремонт синхронного двигателя)
Схемы управления электродвигателями
Техническая эксплуатация и ремонт двигателей постоянного тока
Математическое описание динамических процессов электромеханического преобразования энергии
Определение основных параметров и компоновка оборудования автономного локомотива
Тяговый генератор переменного тока ГС501АУ1